多学科联合仿真
MSC SimXprt开启企业级多学科仿真新时代

一
步 扩 大 V P D 技 术 应 用 效 益 的 问题
M S C 公 司 经 过数 年打造和锤 炼
,
传统 单学 科 分 析 工 具 遭 遇 到 了 功能 上 的
顺 应 企 业 多学 科 仿 真 的 需 求
~ 2 0 0 6 年 9 月 推 出其 全 新 力 作 S i m X p e r t 。
Si
m Xp e r
,
W r ks p a c e 建 立 机 o
现 仿 真 流 程 自动 化
与 MS C 企 业
解
,
械 系 统 的虚 拟样 机
pa c e
,
进 行静 力学
、
准
管 理 平 台 S 1 Il l Ma
Si
m
n a
g
e r
完全 集成
,
t
o 各个 W r ks
具有
一
致
静 力学
、
运 动 学 和 完 整 系 统 的 动 力学
W r ks p a c e o
,
它 提供 完 整 的 包 含 刚 体 和 柔
。
,
分 析 工 程 师 可 以 在 更 短 的 时 间 内实 现 大
型
、
性体 在 内 的多体动 力学 系 统仿真功能
用 户 可 以 通 过 Mo t i o n
积 累和 重 用
i
,
并实
仿真
通过
复 杂 的 真 实 问 题 的数 值 仿 真 和 求 如 图1所 示 。
一
通 过 强 大 的 建 模 功 能和
—
MS C S i
m
Xp e
r
t
致 力于 构 建
多学科联合仿真
机电工程与自动化学院
计算机辅助设计制造专题
2
目 录
1 2 3 4
多学科联合仿真的简介
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
多学科联合仿真在灯泡生产线中的应用
5
多学科联合仿真的发展趋势
机电工程与自动化学院
计算机辅助设计制造专题
飞机升降机运动
运动仿真
实物生产线
灯泡生产线802项目
机电工程与自动化学院
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
多学科联合仿真在灯泡生产线中的应用
5
多学科联合仿真的发展趋势
机电工程与自动化学院
计算机辅助设计制造专题
2.1
多学科联合仿真的方法
联合式:其数据交换原理就是两个不同的仿真工
具之间通过TCP/IP等方式实现数据交换。
Application #1
计算机辅助设计制造专题
2
目 录
1 2 3 4
多学科联合仿真的简介
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
多学科联合仿真在灯泡生产线中的应用
5
多学科联合仿真的发展趋势
机电工程与自动化学院
计算机辅助设计制造专题
解决单学科仿真分析平台应该具备以下功能
机电工程与自动化学院
计算机辅助设计制造专题
机电工程与自动化学院
计算机辅助设计制造专题
The end
Thanks For Your Attention
多学科仿真发展趋势
消除传统意义上“多学科联 合仿真”中模型数据的转换 ,多学科分析基于共同的数 据模型
1
2
具有统一的用户环境,在同一平 台下进行多学科分析,降低用户 环境和界面的复杂程度,减少甚 至消除用户熟悉不同环境所需的 时间;
多学科联合仿真

传统单学科分析的局限
• (2)不同学科的工程师采用不同的分析工具 和数据模型进行独立的分析计算,在考虑学科 之间耦合作用而需要进行多学科集成仿真的时 候,只能通过分析工具之间的数据接口进行 “链式”的“联合仿真”,即一个工程师完成 一个学科点的分析之后,将数据模型或分析结 果通过软件之间的数据接口传递给下一个工程 师,完成计算。这样的联合仿真方式,一方面 学科之间的集成和耦合非常有限,另一方面由 于需要进行大量的数据模型的转换,也会影响 到分析的精度和效率。
传统单学科分析的局限
• (3)众多的单学科点分析工具也使得工程师 们大为头疼。不同的分析工具都有各自不同风 格的操作界面和分析环境,每一种分析工具对 于从事其它学科的工程师来说都过于专业和复 杂,形成了多重用户环境,这种现状一方面限 制了工程师之间的协作和交流,另一方面也制 约了仿真分析的效率,阻碍了仿真分析效益的 进一步提高。
传统单学科分析的局限
• (1) VPD 技术和各学科的分析工具在企业中已 经得到了广泛而深入的应用。工程师们在日常 工作中采用各学科的分析工具独立的完成分析 项目,对于各自使用的分析工具已经足够的熟 练和精通。然而由于各学科采用不同的分析工 具和相应的数据模型,工程师们使用的都是单 学科点的分析工具或通常意义上的多场求解工 具,因此,在分析中无法全面考虑各学科之间 的耦合作用和影响,难于实现真正的一体化的 多学科仿真;
传统单学科分析的局限
• (7)目前企业中的大多数仿真分析工作需要 工程师手动一步一步的进行,使得工程师的工 作量太大,过于疲劳,分析效率有待提高,期 待能够实现分析流程的自动化。
返回
多学科仿真发展趋势
解决单学科仿真分析平台应该具备以下功能: ♦ 消除传统意义上“多学科联合仿真”中模型 数据的转换,多学科分析基于共同的数据模型; ♦ 具有统一的用户环境,在同一平台下进行多 学科分析,降低用户环境和界面的复杂程度, 减少甚至消除用户熟悉不同环境所需的时间; ♦ 充分兼容传统单点分析工具的分析模型和数 据, 保护构开放,便于集成第三方软件或用户自由扩 展; ♦ 加强与CAD软件之间的集成与互动,进行无缝 的数据转换,提高模型导入精度; ♦ 促进分析人员之间、设计与分析之间的交流和 协作;疏通设计——分析流程;方便应用设计 人员的数据模型;
电子产品多学科协同仿真
电子产 品研发面 临的问题
经 过多年 电子产 品的研发 与经验积
累 . 国电 子 科 技 集 团十 四所 形 成 了一 套 中
据与模型都分散在各个设计 人员手 中 , 其
它人 难以共享。 这些知识经验是企业最宝
贵 的 资 源 之 一 有 必要 加 以 整理 与保 存 。
( )缺乏多学科协 同仿真 1
以往 的 研 发 工 作 中 往 往 将 各 学 科 分
亚太合作 , 针对 电子产 品的特 点 在P R EA
Smu t n平台的基础上 ,提出建立基于 i li ao 模块化思想 仿真驱动 全所资源共享的 “ 电子产 品多学科协 同开发平台” 以下简 (
电子产 品多学 科协 同仿真
■ 电子 科技 集团十 四所 曾锐 平丽浩 翁力群 随着信息化技术 的发展 .电子 设备 何 级数的速度提 高。 技术高速发展带来 了 ( )知识 经验 无法积 累和使 用 5 在仿真软件 的使用 中,各学科 软件 的熟练使用人员都会摸索和积 累大量经验 和技巧。 此外 , 以往产 品开发 中的大量数
符 合 自身特 点、 行之有效 的研发体 系。 但 是随着 科技 的高 速发展 和装备研 制的加
速 ,一 些 瓶 颈 开 始 凸现
多学科协 同开发平 台的建立
为突破 以上研发瓶 颈 ,我们与安世
大的从事电子产 品尤其是 雷达研究、 设计 、
制造的专业研究所 ,承担 了我国多个型号
雷达系统的研制任务 。 在 多年的电子设备研 发 中 .我 们总
,
层的操作提供工具 、技术和数据 的支持 .
( )多场耦合动态 仿真 1 如 前文所 述 .电子产 品的开发 涉及 到 多个不 同学科 , 学科之 间耦合紧 密。 例 如 某种 雷达在常温静态 测试 时一切正 常
多学科系统级虚拟样机建模与仿真技术

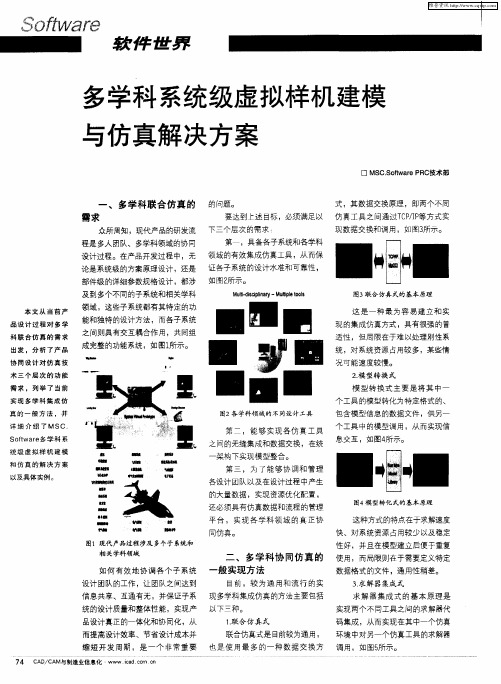
多学科系统级虚拟样机建模与仿真技术本文从当前产品设计过程对多学科联合仿确实需求出发,分析了产品协同设计对仿真技术三个层次的功能需求,并引出当前实现多学科集成仿确实通常方法。
多学科联合仿真需要操纵、机构、有限元等不一致仿真环境的集成与数据交换,MSC.Software提供最为系统与完整的多学科协同仿真开发环境,本文全面介绍了MSC.Software多学科系统级虚拟样机建模与仿确实解决方案,并给出了具体的实例。
1.多学科联合仿确实需求众所周知,现代产品的研发流程是多人团队、多学科领域的协同设计过程。
在产品开发过程中,不管是系统级的方案原理设计,还是部件级的全面参数规格设计,都涉及到多个不一致的子系统与有关学科领域,这些子系统都有自己特定的功能与特殊的设计方法,而各子系统之间则具有交互耦合作用,共同构成完整的功能系统。
图1 现代产品过程涉及多个子系统与有关学科领域如何有效的协调各个子系统设计团队的工作,让团队之间达到信息共享、互通有无,并保证子系统的设计质量与整体性能,实现产品设计真正的一体化与协同化,从而提高设计效率,节约设计成本,缩短开发周期,这是一个非常重要的问题。
为了达到上述目标,我们务必满足下列三个层次的需求:第一,具备各子系统与各学科领域有效的集成仿真工具,从而保证各子系统的设计水准与可靠性;图2 各学科领域的不一致设计工具第二,能够实现各仿真工具之间的无缝集成与数据交换,在统一架构下实现模型整合;第三,为了能够协调与管理各设计团队,与在设计过程中产生的大量数据,实现资源优化配置,还务必具有仿真数据与流程的管理平台,实现各学科领域的真正协同仿真。
2.多学科协同仿确实通常实现方法目前较为通用与流行的实现多学科集成仿确实方法要紧包含下列三种:2.1 联合仿真式(Co-Simulation)联合仿真式是目前较为通用,也是使用最多的一种数据交换方式,其数据交换原理如图3所示,两个不一致仿真工具之间通过TCP/IP等方式实现数据交换与调用。
基于多学科协同的某锁机构系统故障仿真研究
基于多学科协同的某锁机构系统故障仿真研究0 引言可靠性是产品质量的核心. 随着人们对可靠性问题的重视和认识的深入,产品的可靠性指标也在不断提高. 故障仿真模拟技术为提高电子系统和机械系统产品的可靠性提供了一条有效途径.[1,2]常规的故障仿真方法基于相关学科理论知识,建立合适的系统数学模型和故障数学模型,再将故障模型引入到系统模型中,采用有效地数值计算方法求解系统模型. 通过分析故障因素与系统特征参数之间的关系,获取故障原因,提高系统特性,为系统的故障诊断、维修等提供理论支持.[3,4]但在面对多学科耦合的复杂机械系统时,常规方法会遇到系统模型复杂和计算效率低下等问题,而基于单一虚拟样机多体动力学软件的方法只能考虑到结构机构动力学问题.基于多学科协同的故障建模仿真方法可以有效解决上述问题. 复杂产品的多学科耦合建模主要有两种方法:一种是基于统一语言的方法,如基于Modelica语言的多学科领域建模方法等;另一种是基于软件接口的方法,其优势在于利用了各学科领域仿真软件成熟的专业模块和完善的零部件数据库,发挥了各学科领域仿真软件在各自学科领域的特长. [5,6]贾长治等人在建立典型故障模型的基础上,利用虚拟样机对故障模式下的火炮性能进行仿真,得到故障因素阈值,为火炮预防性维修提供了科学依据[7]. 李伟等人以液压式输弹机的机液一体化虚拟样机为故障仿真平台,分析了引起输弹机输弹故障的三种影响因素,建立相应的故障模型进行故障仿真,得到输弹机输弹故障的主要原因,为输弹机的勤务维修提供了理论依据[8]. 刘靖东等人通过多学科动力学建模方法研究,建立了某冷氦增压系统机械、气动、电磁、热与控制多学科动力学仿真分析模型,通过系统流量及压降分析对系统增压故障进行了分析定位[9].本文基于多学科领域软件协同仿真,提出一种针对复杂运动机构系统的故障仿真分析途径. 案例为一典型锁运动机构系统,涉及结构机构、液压驱动、电磁控制等学科领域,应用计算机辅助设计、多体动力学和液压控制分析等商用软件,通过故障模式分析将相关故障影响因素注入系统仿真模型,进行上锁故障仿真分析.1 多学科动力学特征方程要深入研究复杂机械系统各项特性必须全面考虑机械、液压、电路、控制等耦合的系统多学科模型. 机构多体系统将多个零部件由运动副连接起来是复杂机械系统实现其运动功能的基础. 液压传动与控制系统以其快速的压力响应和精确的流量控制而作为动力驱动系统至关重要. 而要实现复杂机械系统实时精确地控制和反馈,性能良好的电控系统必不可少.1.1 机械多体动力学方程多体系统是指由多个物体通过运动副连接的复杂机械系统. 多体动力学分析主要是研究多体系统的运动状态和相互作用力之间的关系. 在弹性小位移前提下,假定弹性变形不影响机构的名义运动(把机构看做刚体系统进行分析得到的运动),建立的动力学方程如下:MU CU KU Q(1)++=其中,U、U和U分别为广义位移、速度、加速度矩阵,质量矩阵M、阻尼矩阵C和弹性矩阵K及广义力矩阵Q 中包含有机构刚体运动参数,这些参数都是机构位置时间的函数.1.2 液压动力学方程连续性方程是质量守恒定律在流体力学中的表达形式. 在不可压缩的恒定流动的液体中,不管平均流速和通流截面沿着流程怎样变化,流过不同截面的流量不变,即q Av = (2)其中,q 为液体流量,A 为通流截面,v 为通过截面A 流体的平均流速.对于理想流体,同一流束上的任意两断面满足伯努利方程:2211221222p u p u h h g g g g ρρ++=++ (3) 其中,p g ρ为单位重量液体的压力能,称为比压能;2u g 为单位重量液体的动能,又称比动能;h 为单位重量液体的位(势)能,又称比位能. 伯努利方程说明,在密封管道内作恒定流动的理想液体具有三种形式的能量,即压力能、动能和位能. 它们之间可以互相转化,但是液体在管道内任一处,这三种能量的总和是一定的.动量方程可用来计算流动液体作用于限制其流动的固体壁面上的总作用力.()m t ∆∑=∆υF (4)动量方程表面,作用在液体控制体积上的外力总和,等于单位时间内流出控制表面与流入控制表面的液体动量之差.1.3 电路系统动力学方程电路数学模型由基尔霍夫定律确定. 电路系统数学模型由代数方程、微分方程等组成,典型电路系统的动力学方程如下: 1()()()()Lq t Rq t q t e t C ++= (5)其中,()e t 为电压, ()q t 为电荷,L 为电感,R 为电阻,C 为电容.对电控类元件,需要将传感器实时采集到的位移、力等物理量参量转换成电路控制所需的电流或电压. 但由于传感器输出的信号比较微弱,不足以直接驱动诸如电磁阀等调节机构,故通常需要先对电信号进行放大. 电路控制系统通过加减、乘除、对数、积分、微分等数学运算再控制电磁阀等调节活门开度.2 基于多学科协同的故障仿真复杂机械系统建模涉及机构运动学、机构动力学、液压传动、电磁控制等学科领域. 本文采用基于软件接口的方法,可以利用各仿真软件成熟的专业模块和完善的零部件数据库. 然而如何协调各软件接口,实现有效的、实时的、同步的数据交互,进行协同仿真尤为重要. 成熟商用软件通常提供与相关软件的数据交互接口,也可利用软件本身提供的二次开发接口,将软件的已有模块与系统连接起来.故障注入是故障仿真技术的核心. 合适的故障注入途径可以提高系统仿真的效率,而合理有效地引入故障因素则决定了系统故障仿真结果的有效性.基于多学科协同仿真的故障仿真流程如图1所示. 首先,对复杂机械系统从系统总体层面到单学科领域进行功能原理分析,应用相应商业软件依次建立结构机构多体系统模型、液压系统模型、电控系统模型等各单学科领域模型,再基于软件接口将各单学科领域模型连接起来进行数据交互和协同仿真,建立起机械系统基于多学科协同的仿真模型. 同时,采用一定的故障模式分析方法对系统关键故障模式进行分析,得出相应故障模式的影响因素,并分析主要影响因素以得到相应的表征参量. 将这些故障模式影响因素的表征参量与已建立的系统仿真模型中的参数关联起来,从而完成故障注入. 运行已包含故障信息的系统多学科协同仿真模型,得出系统主要参数在相应故障模式下的响应变化. 最后,将系统参数在相应故障模式下的特征变化与该故障模式影响因素联系起来,对系统故障进行分析.图 1 基于多学科协同的故障仿真流程3 某锁机构系统故障仿真分析案例锁机构在飞机上的应用十分广泛,如起落架上位锁、舱门锁等,其可靠性直接关系到飞机的安全或是功能任务的完成,是系统的重要部件. 一个完整的锁机构系统通常由锁钩、锁键、锁环等结构机构零部件,液压作动筒、密封垫圈、控制电磁阀等液压系统零部件,控制电路、传感器等电控系统元器件组成,是一个典型的机电液等多学科领域耦合的复杂机构系统.3.1 锁机构系统多学科协同仿真建模首先分别建立锁机构系统各单系统领域模型. 将锁机构三维实体CATIA模型简化,删去不必要的零件,略去无关紧要的特征;在LMS Virtual Lab. Motion模块中,按实际工况添加运动副约束,将锁机构各零件装配起来,并添加相应的外载荷;建立驱动接口模块,以待与其它单系统模型交互连接,完成锁机构多体模型.按照锁机构实际参数,在LMS Imagine Lab. AMESim中建立锁机构详细的液压元件模型;根据液压系统控制原理建立合适的油泵、电磁换向阀、油路等模型;分析电控系统原理,添加合适的控制电路和传感器反馈信号模型;建立反馈接口模块,以待与其它单系统模型交互连接,完成锁机构液压和控制系统模型.最后,将建立好的锁机构系统各单系统模型通过软件接口连接起来,进行数据交互,完成锁机构系统的多学科协同仿真模型,如图2所示.图 2 锁机构系统多学科协同仿真模型3.2 不上锁故障模式分析及故障注入锁机构系统常见的故障模式有不上锁、不开锁、没锁住、自开锁等失效模式. 针对该锁关键的不上锁故障模式,选取各单系统领域典型的故障因素进行故障模式分析.故障模式分析之后,将各单系统领域的故障因素与已建立的锁机构系统多学科协同仿真模型中的相应参数关联起来(如表1所示),从而完成故障注入,得到该锁机构系统基于多学科协同的故障仿真模型.表 1 故障因素分析及模型关联参数故障因素故障原因对应模型参数取值范围锁钩锁环位置偏移结构变形,运动副磨损等Offset -5—12 /mm锁环运动不到位结构变形,运动副卡滞等TouchAngle 25—45 / °液压系统压力不足液压泵性能退化,溢流阀故障等RV00-1/pcrack 23—35 /bar锁液压油腔内泄漏密封元件磨损、破裂,油腔变形等BAF11-1/dc 0.01—0.28 /mm 电磁阀阀芯换向不到位结构磨损卡滞,电控信号异常等FXY0-1/tp4 0—60% 锁运动位置传感器提前触发结构变形,传感器信号异常等SW01-1/thold 0.026—0.029m3.3 故障因素仿真分析3.3.1 锁钩锁环相对位置偏移由于结构变形、运动副磨损等导致锁钩锁环运动精度误差,致使两者相对位置产生偏移. 锁钩锁环相对位置偏移量越大,即接触位置越偏离锁钩转轴,则完成上锁动作越困难. 图3给出了不同锁钩锁环相对位置偏移量(0 mm为正常接触位置,“-”表示接触位置向接近锁钩转轴方向偏移,12 mm为接触位置在锁钩的最外端)时的锁杆运动位移曲线. 在锁钩与锁环接触前,锁杆运动位移曲线没有变化. 锁钩锁环接触后,随着锁钩锁环相对位置偏移量的增加,上锁运动逐渐变缓,完成上锁动作的时间不断增加. 当偏移量增加至12 mm时,上锁动作未能完成.图 3 不同锁环偏移量时的锁杆位移曲线3.3.2 锁环运动不到位由于结构变形等致使锁环运动不到位导致锁钩与锁环提前接触,要完成上锁动作就必须克服由变形等引起的额外阻力. 图4给出了锁钩在不同转动角度(45°为正常接触角度)时接触锁环的锁杆运动位移曲线. 与锁环偏移情况类似,随着接触角度的减小,上锁运动逐渐变缓,完成上锁动作的时间不断增加. 不同之处在于,由于锁钩锁环提前接触,上锁运动开始变缓的时刻也不断提前. 当接触角度为30°时,上锁动作完成时间超过额定的0.15 s,当接触角度提前至25°时,上锁动作未能完成. 由于在锁钩转动角度越小的位置,锁机构系统所能提供的驱动力矩也越小,在接触角度为25°上锁失效时,锁杆运动的位移量也只有约14 mm.图 4 不同开始接触角度时的锁杆位移曲线3.3.3 液压系统压力不足液压系统压力不足会导致锁机构的驱动力减小,从而锁钩输出地驱动力矩也相应减小. 在外载荷不变的情况下,上锁动作变缓. 如图5所示,在液压系统压力从额定压力35 bar依次降至26 bar时,从上锁动作开始后的整个上锁过程,上锁运动不断变缓,上锁完成时间不断增加. 当系统压力降至23 bar时,锁机构系统上锁失效.图 5 不同系统压力时的锁杆位移曲线3.3.4 锁液压油腔内泄漏锁杆运动位移曲线因锁液压油腔内泄漏而产生的特征变化与其因液压系统压力不足而产生的特征变化类似. 这是因为内泄漏对锁驱动力影响的实质就是减小锁两个液压油腔的压力差,这与系统压力不足对锁驱动力的影响是等价的. 图6给出了不同内泄露量情况(0.01 mm表示正常密封状态)下的锁杆运动位移曲线. 随着泄漏量的增加,上锁运动逐渐变缓,上锁完成时间不断增加.图 6 不同内泄漏量时的锁杆位移曲线3.3.5 电磁阀阀芯换向不到位电磁阀阀芯换向不到位会使通过电磁阀的液压油流量显著减小,从而导致上锁运动变缓,上锁完成时间增加. 图7给出了不同阀芯不到位情况下的锁杆运动位移曲线. 与系统压力不足和内泄漏情况相比,由于电磁换向阀对液压油流量有限制作用,从上锁开始时刻锁位移曲线就出现了明显的滞后. 当电磁阀阀芯不到位量为50时,上锁动作完成时间超过额定的0.15s,当阀芯不到位量为60时,系统上锁失效.图7 不同阀芯不到位量时的锁杆位移曲线3.3.6 锁运动位置传感器提前触发在正常的上锁过程中,当锁机构上锁通过临界点时,锁运动位置传感器触发,一方面用于确定锁的上锁状态,另一方面反馈到液压控制系统,断开供油管路,以减小上锁完成时液压对结构的冲击. 图8给出了锁运动位置传感器不同触发位置(0.029m为正常触发位置)时的锁杆运动位移曲线. 在传感器触发前,锁杆运动位移曲线没有变化. 由于传感器触发时刻处于上锁运动的临界点附近,锁杆运动位移曲线对其非常敏感. 随着传感器提前触发量的增加,锁机构迅速进入上锁失效模式.图8 不同传感器触发位置时的锁杆位移曲线对比分析锁杆位移曲线等锁机构系统参数对不同故障因素的响应,归纳系统参数的响应特征,对锁机构系统故障的分析和诊断都有一定的参考价值.表 2 不同故障因素时的系统参数响应特征对比故障因素系统参数响应特征锁杆运动位移曲线其它特征锁钩锁环位置偏移接触时刻不变,接触之后滞后锁环运动不到位接触时刻提前,接触之后滞后液压系统压力不足全过程滞后,接触之后更明显系统压力不足锁液压油腔内泄漏全过程滞后,接触之后更明显电磁阀阀芯换向不到位全过程滞后流量显著减小锁运动位置传感器提前触发临界点附近开始滞后4 结论(1)基于多学科领域软件协同仿真,提出了一种针对机电液等多学科领域耦合的复杂运动机构系统的故障仿真分析途径,并论述了基于软件接口的多学科协同仿真建模技术和故障注入等关键技术.(2)针对某锁机构系统,建立基于机电液耦合的多学科领域协同仿真模型,注入不上锁故障模式相关的故障因素,完成故障仿真,并对故障因素进行了分析;表明该途径对工程实际复杂运动机构系统有效可行.(3)基于多学科领域协同的复杂机械系统故障仿真理论和体系还有待进一步发展和完善;故障仿真技术不仅有助于提高机械产品可靠性,也可为复杂机械系统的故障机理分析、故障诊断和维修等提供数据支持.(4)针对复杂机械系统典型故障模式,分析故障机理,总结演化规律,并融入多学科领域协同仿真体系,计算系统可靠度将是本文的后续工作.。
系统级多学科建模与联合仿真
系统级多学科建模与联合仿真1.概述1.1.数字化建模仿真在技术的发展和市场的驱动下,产品功能越来越复杂,通过解析的方法对产品进行分析的难度逐渐增大。
而采用实验的方法对产品进行研究则需要物理样机,对于这种方法,一方面所需投入较多、时间周期较长,另一方面,当发现样机在某些功能和性能层面无法满足要求时,进行更改的成本非常高。
即使这些问题都能够解决,实验方法还要面对某些工况下实验带来的危险和破坏、实验环境不一致、实验结果的离散性等诸多问题。
此种情况下,基于计算机技术,借助于专业的软件,通过数字化建模仿真的方式对产品的方案进行验证和优化,可以显著缩短研发周期、降低研发成本、完善产品质量,提高产品的市场竞争力。
1.2.系统级建模随着产品组成、功能的复杂化,部件各部分之间的耦合关系越来越紧密。
当对产品的一各组成部分独立建模时,需要建立其边界条件。
但由于该部分与其他部分错综复杂的耦合关系及其他部分外特性的复杂性,边界条件难以采用简答的函数关系进行描述,而是需要详细的建模,如此类推,对于产品的数字化分析需要系统级的建模。
另一个方面,当前产品的多数功能都需要各部分之间紧密配合才能实现,这个特点也自然地导致了系统级建模的必要性。
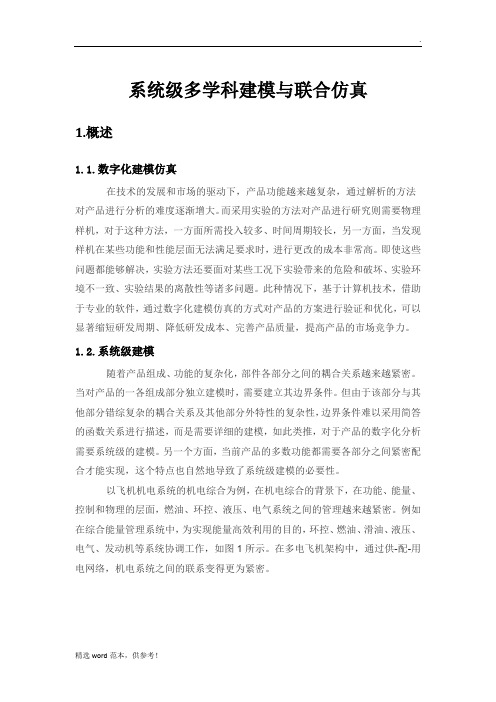
以飞机机电系统的机电综合为例,在机电综合的背景下,在功能、能量、控制和物理的层面,燃油、环控、液压、电气系统之间的管理越来越紧密。
例如在综合能量管理系统中,为实现能量高效利用的目的,环控、燃油、滑油、液压、电气、发动机等系统协调工作,如图1所示。
在多电飞机架构中,通过供-配-用电网络,机电系统之间的联系变得更为紧密。
图1飞机综合能量管理系统1.3.多学科建模随着机-电-液-控一体化的高速发展,由单一领域部件构成的产品越来越少,取而代之的是综合利用机械、电、磁、液压和控制等诸多领域研究成果、涉及多个学科的产品。
图2飞机机电系统飞机机电系统所涉及的学科如图2所示,每个机电子系统都涉及多个学科,这种特点使得系统级建模必然涉及多个学科。
系统级多学科建模和联合仿真.doc
系统级多学科建模和联合仿真系统级多学科建模和联合仿真1。
概述1.1。
在技术和市场发展的驱动下,数字建模和仿真在产品功能上变得越来越复杂。
用分析方法分析产品越来越困难。
另一方面,通过实验方法研究产品需要一个物理原型。
对于这种方法,一方面,它需要更多的投资和更长的时间周期;另一方面,当发现原型在某些功能和性能方面不能满足需求时,进行更改的成本非常高。
即使这些问题能够得到解决,实验方法仍然会面临许多问题,如在一定的工作条件下实验的危险性和破坏性、实验环境的不一致性、实验结果的离散性等。
在这种情况下,基于计算机技术,借助专业软件,通过数字建模和仿真对产品方案进行验证和优化,可以显著缩短研发周期,降低研发成本,提高产品质量,提高产品的市场竞争力。
1.2 .系统级建模随着产品组成和功能的复杂性,零件之间的耦合关系越来越紧密。
当产品的每个组件被独立建模时,需要建立其边界条件。
然而,由于这部分与其他部分之间复杂的耦合关系以及其他部分的外部特性的复杂性,很难用简单的函数关系来描述边界条件,但需要进行详细的建模,等等。
对于产品的数字分析,需要系统级建模。
另一方面,当前产品的大部分功能需要各部分之间的紧密合作来实现,这自然导致了系统级建模的必要性。
以飞机机电系统的机电一体化为例,在机电一体化的背景下,燃油、环境控制、液压和电气系统之间的管理在功能、能量、控制和物理方面越来越紧密。
例如,在集成的能量管理系统中,为了达到高效利用能量的目的,环境控制、燃油、润滑油、液压、电气、发动机和其他系统协同工作,如图1所示。
在多电飞机结构中,需要物理样机通过供应和测试方法来研究产品。
对于这种方法,一方面,它需要更多的投资和更长的时间周期;另一方面,当发现原型在某些功能和性能方面不能满足要求时,修改的成本非常高。
即使这些问题能够得到解决,实验方法仍然会面临许多问题,如在一定的工作条件下实验的危险性和破坏性、实验环境的不一致性、实验结果的离散性等。
面向复杂系统工程的多学科统一建模与联合仿真技术研究与应用实践
面向复杂系统工程的多学科统一建模与联合仿真技术研究与应用实践作者:暂无来源:《智能制造》 2017年第5期航空工业信息技术中心(金航数码)郄永军多学科联合仿真技术应用工程背景航空产品是涉及机械、电子、电气、控制、液压及软件等多学科, 可靠性、维修性和保障性等多专业工程要求的复杂系统,其开发模式正经历从基于文档向基于模型的范式转移。
建立以基于模型的系统工程方法论为指导、以功能/性能样机为载体,贯穿需求、功能、逻辑与物理构建模型在环、软件在环、硬件在环及人员在环的数字化综合仿真环境,开展多学科统一建模与联合仿真,实现功能/ 性能需求在开发早期阶段的验证与确认,基于数学模型(虚拟样机)开展复杂系统架构与方案的设计、权衡与分析优化,缩短设计迭代周期,提升开发质量,已成为国际航空航天和防务领域复杂系统开发的主流趋势。
当前,基于Modelica 语言的系统仿真技术已在达索航空、德宇航和空客得以工程应用,通过构建由功能样机、性能样机和几何样机组成的数字样机,可实现在虚拟空间下开展虚拟试验/ 试飞,极大的降低物理试验/ 试飞的周期与成本。
多学科联合仿真技术演进历程系统级多学科联合仿真主要应用于系统架构与方案权衡、功能分配、接口定义、子系统参数优化、功能/ 性能早期验证和确认等领域,涉及多学科的系统仿真技术主要经历了如下发展历程。
(1)基于接口的多学科建模与仿真技术:该方法是由各学科相应的商用仿真软件提供或开发相应的接口。
其完全依赖商用软件之间的一对一接口,这些接口往往为某些商业公司所私有,不具有标准性和开放性。
(2)基于高层体系结构(HLA):该方法克服了基于接口的诸多缺陷,较好地实现了多学科建模与仿真,但要求建模人员必须先熟悉HLA/RTI 的各种服务协议,再编制相应的程序代码,并且需要人为的割裂不同学科子系统之间的耦合关系,实质上是一种子系统层次上的集成方法。
(3)基于统一建模语言的多学科系统仿真技术:该方法具有与学科无关的通用模型描述能力,任何学科均可实现统一建模。
联合仿真的意义
联合仿真的意义
联合仿真是一种集成多种仿真技术的方法,它将不同领域的仿真模型和仿真工具结合起来,模拟和评估复杂系统的行为和性能。
联合仿真的意义不仅在于提高仿真的准确性和可信度,更在于促进不同领域的交叉融合和协同创新。
通过联合仿真,可以快速评估系统的可行性和风险,优化系统的设计和性能,提高决策的科学性和可行性。
此外,联合仿真还可以为系统的实现和运行提供支撑,减少系统故障和失误的风险,提高系统的可靠性和安全性。
因此,联合仿真在军事、航空航天、交通运输、医疗保健等领域有着广泛的应用和推广前景。
- 1 -。
MSC MD Nastran多学科仿真
MD Nastran全球功能最强、应用最广的多学科仿真平台在今天多样化激烈竞争的市场环境中,企业需要在最短的时间内设计和验证产品性能,将最好的产品以最快的速度投放市场。
企业设计研发部门所使用的传统的工程分析方法是利用点分析工具,近似地模拟产品在现实环境中的行为,但是通常情况下,产品的性能总是受到多种物理环境的同时影响,用户使用单一分析工具往往不能准确充分地模拟产品的真实性能。
为了解决这个问题,进一步提升产品的竞争力,从而使企业更好的适应市场需求,MSC 推出了多学科(MD )分析技术,大大减少仿真分析与实际工作环境之间的差距,确保准确模拟真实的世界,MD 技术是MSC.Software 公司企业级解决方案的核心和基础,MSC.Software 的企业仿真方案使用详细的数字产品模型模拟并验证产品各个方面的性能、制定和跟踪严格的设计目标、沟通协调产品开发,从而使产品创新和质量提高到一个最具竞争力的新水平。
一.什么是MD NastranNastran 是美国国家航空航天局(National Aeronautics and Space Administration ,简称NASA ,又称美国宇航局)为适应各种工程分析问题而开发的多用途有限元分析程序。
这个系统称为NASA Structural Analysis System ,命名为Nastran 。
20世纪60年代初,美国宇航局为登月需要,决定使用有限元法开发大型结构分析系统,并能在当时所有大型计算机上运行。
MacNeal-Scherndler Corporation (即MSC公司)是开发小组主要成员。
Nastran 程序最早在1969年通过COSMIC (Computer Software Management and Information Center )对外发行,一般称为COSMIC.Nastran 。
之后又有各种版本的Nastran 程序发行,其中以MSC 公司所开发的MSC.Nastran 程序用户最为广泛。
TISC-系统多学科协同仿真平台
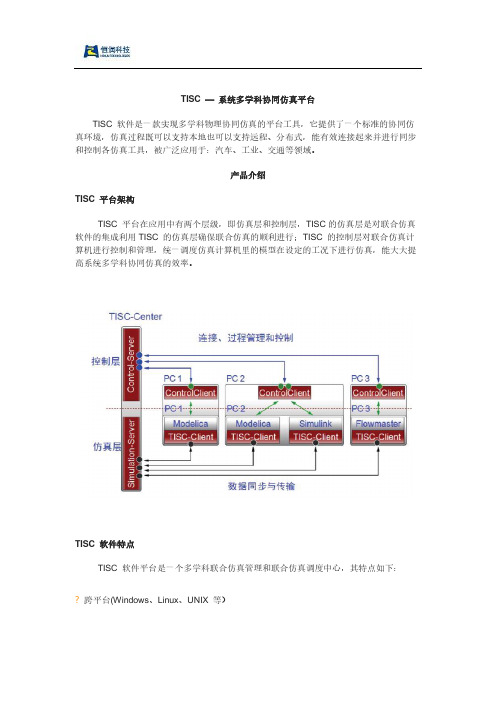
TISC —系统多学科协同仿真平台
TISC 软件是一款实现多学科物理协同仿真的平台工具,它提供了一个标准的协同仿真环境,仿真过程既可以支持本地也可以支持远程、分布式,能有效连接起来并进行同步和控制各仿真工具,被广泛应用于:汽车、工业、交通等领域。
产品介绍
TISC 平台架构
TISC 平台在应用中有两个层级,即仿真层和控制层,TISC的仿真层是对联合仿真软件的集成利用TISC 的仿真层确保联合仿真的顺利进行;TISC 的控制层对联合仿真计算机进行控制和管理,统一调度仿真计算机里的模型在设定的工况下进行仿真,能大大提高系统多学科协同仿真的效率。
TISC 软件特点
TISC 软件平台是一个多学科联合仿真管理和联合仿真调度中心,其特点如下:
? 跨平台(Windows、Linux、UNIX 等)
? 支持大部分CAE 商业仿真软件模型联合仿真,目前支持AMESim、Flowmaster、Fluent、Adams 等模型集成
? 分布式仿真与集成管理
? 仿真调度与控制中心
? 用户可扩展
TISC 软件仿真工具集成
分布式联合仿真的实现需要与不同的仿真工具进行集成,然后进行协同仿真。
TISC 可以支持大多数的CAE 仿真软件,另外还支持符合FMI1.0 的模型,还提供C、C++、C#、Python及Fortran 语言的开发接口,用户可以在TISC 环境下进行各软件接口定制开发。
多学科联合仿真

第二路是拉伸弹簧的弹力大小控制,
第三路是驱动关节的旋转角度控制。
通过对三路反馈信号的控制,在联合仿真过程中动态修改PID控
制参数,实现对机械手夹持机构的轨迹控制要求,最终保证夹 持机构能够实现比较平稳的夹紧和放松动作,保证其较高精度 的轨迹跟踪特性。
基于目前有许多仿真软件,包含多个领域,系统也 很广泛。MSC.Software公司是行业的领导者,该公司退 出多学科仿真引擎MD以及企业级解决方案SimEnterpris
多学科联合仿真的发展趋势
1
消除传统意义上“多学科联合仿真”中 模型数据的转换,多学科分析基于共同的数 据模型
2
具有统一的用户环境,在同一平台下进行 多学科分析,降低用户环境和界面的复杂程 度,减少甚至消除用户熟悉不同环境多续的 时间。
多学科联合仿真
本次报告成员:
杨兴科 于建飞 吴佳伟 梅年丰 王君
1.1为什么需要多学科联合仿真
科研和生产中的问题,大多数是复杂的 多学科问题的集成。
各学科采用不同的分析工具和相应的数 据模型,工程师们使用的都是单学科点 的分析工具或通常意义上的多场求解工 具。
在考虑多学科间的耦合作用需要进行集 成仿真时,只能通过分析工具间的接口 进行“链式”的“联合仿真”。
利用Pro/E软件建立夹持机构各零件及装配体的三维模型,
将装配体模型导入 ADAMS/View 中进行分析。对导入到 ADAMS中的三维模型添加相应的约束和驱动,具体的拓 扑结构如图所示。照此拓扑图添加约束,使夹持机构的各 个构件之间有确定的约束关系川,保证仿真时各个构件具
有正确的运动。定义约束和驱动后的模型如图所示。
多学科联合仿真
多学科联合仿真的要求
1.具备各子系统和各学科领域的高效集成 仿真工具。
2.能够实现各仿真工具之间的无缝集成和 数据交换,在同一构架下实现模型整合。
3.具有仿真数据和交流管理的平台,实现 各学科领域的真正联合。
3、多学科联合仿真的概念及其原理
传统产品开发与现行产品开发的对比
传统的产品开发流程
现行产品开发流程
多学科联合仿真的要求
多学科联合仿真实现方法
目前较为通用的多学科集成仿真方法主要包括以下几种:
1. 联合式: 其数据交换原理就是两个不同的仿真工具 之间通过TCP/IP等方式实现数据交换。
2.模型转换式: 主要是将一个工具的模型转化为特 定的格式,包含模型信息的数据文件供另外一个工 具中的模型调用,从而实现信息交互。
MSC.ADAMS C++求解器集成于MCS.EASY5中,直接调用 MSC.ADAMSC++求解器来计算MCS.EASY5的模型。 4、在MCS.EASY5中建模并仿真
MCS.EASY5会在后台直接调用、运行MSC.ADAMS C++求解器。
MCS.SimOffice实现完整的产品开发流程
MCS.SimOffice的未来架构
目前, MSC.Software公司正在积极地开展工作, 将MCS.SimOffice各成员移植,整合到统一的架构中, 在同一界面环境下实现更为便利的协同仿真。
根据实现集成仿真的三种通用方法各自的 优势和特点,结合各仿真工具自身的特点和用 途, MCS.SimOffice成员间通过不同的方式实 现整合。
MSC.EASY5与MSC.ADAMS集成方式
目前,MCS.EASY5与MSC.ADAMS两者之间的集成越来越紧密, 集成的方式也越来越丰富。MSC.EASY5与MSC.ADAMS可以通过联 合仿真式、模型转换式和求解器集成式三种方式进行协同仿真。 1、联合仿真式
MSC SimXpert—开启企业级多学科仿真新时代
步 和接 轨 这 些 因素都 迫 使各 行 各 业 的制造 商 不 断 改进 设计 手 段 ,从 而缩 短 产 品开 发周 期 ,进 一 步减 少产 品开 发成 本 ,同 时 加 速技 术 创新 提 高产 品质 量 ,来应 对 利 润 的压 力 和各 个 因素
的挑 战 。
响 了 V D应 用 效益 的进 一 步提 升 ,使 得 仿真 分 析 的成本 也 开始 P
增加 。
毫 无 疑 问 .V D技术 遇 到 了全 新 的需 求 和挑 战 .正 酝酿 着 P
一
次 革 命性 的 突破 。 我们 可 以将企 业 当前对 V D技 术 的需 求 归 P
炼 推 出其全 新 力作 SmX et i p r。
造 、供应 链 管理 、协 同开 发 、市 场竞 争 和用 户 要 求等 的 综合 作
用及 对企 业 提 出 的迫切 和 苛 刻 的要 求下 ,所 提 出 的切 实 可行 的
具 有革 命 性 的技术 方案 。V D技术 涉 及 多体 系 统动 力学 、计 算 P 结构 动 力 学 、传热 、疲 劳 、流 体 、控 制 、计 算 方法 与 软件 工 程 等 多个 学科 利 用 计算 机 仿真 技 术 建立 与物 理 样机 相 对应 的模 型 ,并进 行评 估 和 测试 ,从 而 获取 关 于候 选 物 理模 型 设计 方 案
如 结 构分 析 、机 构 动 力学 、传 热 、碰 撞 等 都能 在 同一 个 完 整的 分 析 环境 下 完成 这样 的 创新 无 疑 大大 方便 了用户 ,省 去 了学
多学科系统级虚拟样机建模与仿真解决方案
需求
程是多人团队、多学科领域的协同
C IP 要达到上述 目标 ,必须满 足以 仿真工具 之间通过T PI等 方式实 第 ,具备各子 系统和各学科
曼 蔓
众所周知 ,现代产 品的研发流 下三个层次的需求 : 设计过 程。在产 品开 发过 程中 ,无 领域的有效集成仿真 工具 ,从 而保 论是 系统级 的方案原理设 计 ,还是 证各子系统 的设计水 准和可靠 性 ,
之 间可 以通过不 同方式实现模 型数 立 的控 制 与 多学 科 合和计算过程协 A A S S .A Y 模 型 作为 一套 S 方程加入到M CA A S( l动态 S .D M d l 同。同时 ,M C S 正在积极 地开展 工 G E 链接库 形式 引入 ) M CA A S 。 S .D M 求 作 ,j M CSm 仟1e  ̄ S .1 0 c各成员移植、 }
信息共享 、互通 有无 ,并保 证子系 现 多学科集成仿真 的方法 主要 包括
统的设计质量和整体性能,实现产 以下三种。 品设计真正的一体化和协同化 , 从
而提高 设计效率 、节省设计成本并
1 合 仿 真 式 . 联
联合仿真式是 目前较为通 用 ,
缩 短 开 发 周期 ,是 一 个 非常 重要 也 是使 用 最 多 的一 种 数据 交 换方 调用 , 图5 示。 如 所
维普资讯
oo tv f fva e
多学科 系统 级虚 拟样机建模 与仿真解 决方案
一
_一 品 i l i
。
口 MS S f r C技术部 C.o waePR t
、
多学科 联 合仿 真 的 的问题。
式 ,其数据交换原理 ,即两个不同 现数据交换和调 用,如 图3 示。 所
多学科交叉融合的虚拟仿真实验探索与实践
多学科交叉融合的虚拟仿真实验探索与实践作者:刘明忱王典来源:《科技资讯》2023年第23期作者简介:刘明忱(1987—),男,博士,工程师,研究方向为虚拟仿真技术、地震数据处理与解释。
王典(1978—),女,博士,教授,研究方向为虚拟仿真技术、地震勘探技术。
基金项目:吉林大学2021年实验技术项目(SYXM2021a013)。
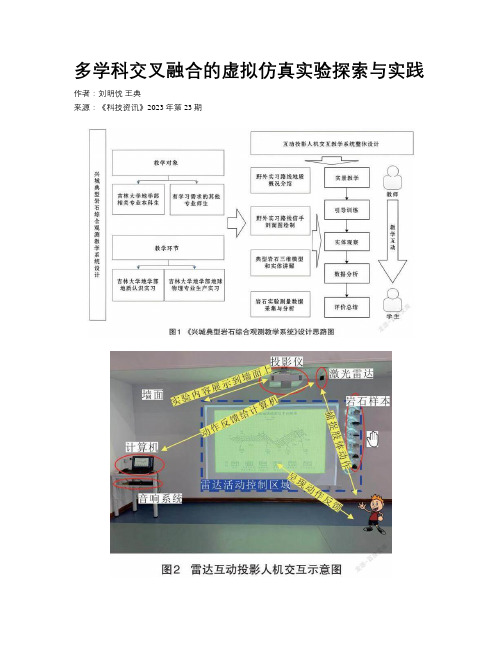
摘要:根据地学类专业新工科在人才培养中遇到的多学科交叉深度融合的实际情况,有效提高野外实习的教学效果,解决特定实习路线上典型岩石信息回看、采样难、检测成本高等问题,以兴城典型岩石综合观测教学系统为例,基于Unity3D开发虚拟现实实验环境,采用雷达互动投影技术,与投影显示用户界面相结合,实现了野外实习路线典型岩石多要素、全方位的认识与分析。
学生可基于该系统与界面进行互动反馈,有利于加深多学科知识的综合理解与运用。
同时,开发的移动版本可在野外实习时也能反复对照查看,培养学生通过多种手段综合解决实际问题的能力。
关键词:虚拟仿真多学科交叉互动投影地学综合实验中图分类号:G642.0Abstract:This paper aims to effectively improve the teaching effectiveness of field practice,and solve the problems of the information review, difficult sampling and high testing cost of typicalrocks on specific practice routes according to the actual situation of interdisciplinary deep integration encountered in the talent cultivation of new engineering in geoscience majors. Taking the teaching system for the comprehensive observation of typical rocks in Xingcheng as an example, this paper develops the experimental environment of virtual reality based on Unity3D, and uses radar interactive projection technology to achieve the multi-element and all-round understanding and analysis of typical rocks in field practice routes in combination with the projection display user interface. Students can interact with the interface for feedback based on the system, which is beneficial for deepening the comprehensive understanding and application of multidisciplinary knowledge. At the same time, the developed mobile version can be repeatedly referred and viewed during field pratice to cultivate students' ability to comprehensively solve practical problems through a variety of means.Key Words:Virtual simulation; Interdisciplinarity;Interactive projection;Comprehensive geoscience experiment2013年,教育部发布关于开展国家级虚拟仿真实验教学中心建设的通知,此后全国分批次共建设了300个具有示范和引领作用的国家级虚拟仿真实验教学中心。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
机电工程与自动化机联合仿真模型的验证 和意义
挖掘机联合仿真模型的验证 联合仿真时, 将复杂系统的ADAMS的运动学模型和 AMEsim 液压系统模型有机地联系在一起.AMEsim为主控
元件,用户在AMEsim环境下运行联合仿真并控制ADAMS的
机电工程与自动化学院
计算机辅助设计制造专题
第八组 多学科联合仿真的简介及应用
机电工程与自动化学院
计算机辅助设计制造专题
目 录
1 2 3
多学科联合仿真的简介 王德贤 毛恩辉
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
马仁飞
4 5
多学科联合仿真在灯泡生产线中的应用
曾宁
多学科联合仿真的发展趋势
有限,而且需要进行大量的数据模型的转换,
导致仿真缺乏关联性和一致性,影响了精度和 效率。 在21世纪初,多学科联合仿真的概念就应 运而出。
机电工程与自动化学院
计算机辅助设计制造专题
1.2
多学科联合仿真的概念
所谓多学科联合仿真,就是根据系统分析的 目的,在分析系统各要素性质及其相互关系的基
础上,建立能描述系统结构或行为过程、且具有
TCP/IP Mpcci
Application #2
机电工程与自动化学院
计算机辅助设计制造专题
2.1
多学科联合仿真的方法
模型转换式:主要是将一个工具的模型转化为 特定的格式,包含模型信息的数据文件供另外一
个工具的模型调用,从而实现信息交互。
Run time
Application #1
-Nodel
计算机辅助设计制造专题
2
目 录
1 2 3 4
多学科联合仿真的简介
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
多学科联合仿真在灯泡生产线中的应用
5
多学科联合仿真的发展趋势
机电工程与自动化学院
计算机辅助设计制造专题
解决单学科仿真分析平台应该具备以下功能
机电工程与自动化学院
计算机辅助设计制造专题
机电工程与自动化学院
计算机辅助设计制造专题
The end
Thanks For Your Attention
真正联合。
机电工程与自动化学院
计算机辅助设计制造专题
1.4
多学科联合仿真的意义
利用多学科联 合仿真,在基于一 个共同的数据模型 的条件下,实现了 仿真的一致性和关 联性,增强了仿真 的精度和可靠性, 提高了仿真效率。
机电工程与自动化学院
计算机辅助设计制造专题
目 录
1 2 3 4
多学科联合仿真的简介
挖掘机的机械系统和液压系统联合的虚拟样机,使二 者在协同仿真中工作. 在挖掘机中,所谓的联合仿真就是在虚拟仿真 过程中机械系统和液压系统将有关的状态参数相互
传递,引用,产生类似于实际挖掘机工作装置中两个
系统的有机关联:机械系统模型中的驱动力大小引
机电工程与自动化学院
计算机辅助设计制造专题
用液压系统模型中提供的液压力;同时在液压系统 模型中,各元件的压力和流量方程也会直接引用机 械系统中各个关键点的速度和位移函数.
仿真进程.从ADAMS环境中输出数据到AMEsim模式下采用 共同的仿真模式.即 AMEsim通知ADAMS在给定的时间间 隔提供它的输出数据, 由ADAMS自己求出他的模型.
机电工程与自动化学院
计算机辅助设计制造专题
挖掘机联合仿真系统的简化模型
根据对简单联合模型的仿真分析,验证了基于联合仿真模型 的准确性,模型能够反映挖掘机工作的实际状态.
机电工程与自动化学院
计算机辅助设计制造专题
挖掘机联合仿真模型的意义
2
① 通过使用多学科联合仿真技术在挖掘机中的应用,无
需制造实物样机就可预测产品的性能,节省了物理样
机的制造时间,降低了开发成本,减少了风险. ② 把原本在样机试验阶段的才能发现的问题一一解决, 为企业带来实实在在的经济效益. ③ 这将给挖掘机生产企业带来很大的发展机遇,提高他 们的市场竞争力!
3
4
架构开放,便于集成第三方 软件或用户自由扩展;
机电工程与自动化学院
计算机辅助设计制造专题
多学科仿真发展趋势
加强与CAD软件之间的集成 与互动,进行无缝的数据 转换,提高模型导入精度
5
6
促进分析人员之间、设计与分析 之间的交流和协作;疏通设计— —分析流程;方便应用设计人员 的数据模型
机电工程与自动化学院
式进行虚拟产品设计开发,仿真模型的参数就是物理样 机的设计参数,虚拟样机的参数修改方便,相对物理样机 而言是软模型,它能够轻易地实现原型的多样化,而且柔 性好.
机电工程与自动化学院
计算机辅助设计制造专题
1 挖掘机联合仿真的简介 通过AMEsim(多学科领域复杂系统建模仿真平
台)ADAMS(机械系统动力学软件)之间的接口,设计
Application #2
-Litrary
机电工程与自动化学院
计算机辅助设计制造专题
2.1
多学科联合仿真的方法
求解器集成式:实现两个不同仿真工具之间求解 器代码的集成,从而实现一个仿真环境对另一个仿
真环境求解器的调用。
Solver #1
Solver #2
机电工程与自动化学院
计算机辅助设计制造专题
多学科仿真发展趋势
消除传统意义上“多学科联 合仿真”中模型数据的转换 ,多学科分析基于共同的数 据模型
1
2
具有统一的用户环境,在同一平 台下进行多学科分析,降低用户 环境和界面的复杂程度,减少甚 至消除用户熟悉不同环境所需的 时间;
机电工程与自动化学院
计算机辅助设计制造专题
多学科仿真发展趋势
充分兼容传统单点分析工 具的分析模型和数据, 保 护客户的既有投资
计算机辅助设计制造专题
多学科仿真发展趋势
7
定制仿真分析流程,制定企 业仿真分析规范;
8
仿真分析流程运行方式灵活, 可 重复性好,实现仿真分析的自动化
机电工程与自动化学院
计算机辅助设计制造专题
多学科仿真发展趋势
9
有效地组织和管理仿真数据和 流程, 即能与企业数据管理系 统(如MSC SimManager)整合 ,从而建立企业知识库,提高 企业知识共享和重用的水平
目 录
1 2 3 4
多学科联合仿真的简介
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
多学科联合仿真在灯泡生产线中的应用
5
多学科联合仿真的发展趋势
机电工程与自动化学院
计算机辅助设计制造专题
3.1
挖掘机的机械系统和液压系 统的联合机理
联合机理的概念
基于联合仿真技术的联合机理是采用数字仿真的形
一定逻辑关系或数量关系的仿真模型,据此进行 试验或定量分析,以获得正确决策所需的各种信 息。
机电工程与自动化学院
计算机辅助设计制造专题
1.3
多学科联合仿真的要求
具备各子系统和各学科领域的高效集成仿真工具。
能够实现各仿真工具之间的无缝集成和数据交换,在
同一构架下实现模型整合。
具有仿真数据和交流管理的平台,实现各学科领域的
机电工程与自动化学院
计算机辅助设计制造专题
2
目 录
1 2 3 4
多学科联合仿真的简介
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
多学科联合仿真在灯泡生产线中的应用
5
多学科联合仿真的发展趋势
机电工程与自动化学院
计算机辅助设计制造专题
飞机升降机运动
运动仿真
实物生产线
灯泡生产线802项目
机电工程与自动化学院
多学科联合仿真的实现方法
多学科联合仿真在挖掘机中的应用
多学科联合仿真在灯泡生产线中的应用
5
多学科联合仿真的发展趋势
机电工程与自动化学院
计算机辅助设计制造专题
2.1
多学科联合仿真的方法
联合式:其数据交换原理就是两个不同的仿真工
具之间通过TCP/IP等方式实现数据交换。
Application #1
刘佳佳
机电工程与自动化学院
计算机辅助设计制造专题
1
多学科联合仿真的简介
1.1
多学科联合仿真的原因 多学科联合仿真的概念 多学科联合仿真的要求 多学科联合仿真的意义
1.2
1.3
1.4
机电工程与自动化学院
计算机辅助设计制造专题
1.1
多学科联合仿真的原因
由于各学科采用不同的仿真工具和不同的 数据模型,使得各学科之间的集成和耦合非常