武汉理工大学《自动控制原理》考研大纲参考书目及考试范围
《自动控制原理》考试大纲

《自动控制原理》考试大纲《自动控制原理》考试大纲(一)自动控制的基本原理1.自动控制的基本原理与方式:反馈控制原理与思想,反馈控制系统的基本组成,自动控制系统的基本控制方式;2.自动控制系统的分类;3.自动控制系统的基本要求;(二)控制系统的数学描述1.时域模型:典型物理系统的时域建模;线性系统基本特性;线性定常微分方程分析;非线性系统的线性化;运动模态分析;2.复数域模型:系统的传递函数定义、性质;典型环节的传递函数;3.动态结构图:结构图的绘制与化简;信号流图的绘制;梅森增益公式及其综合应用;闭环系统的传递函数(开环传递函数、闭环传递函数、误差传递函数);(三)控制系统的时域分析1.时域分析的一般方法:基本信号及系统的一般响应以及其物理意义;控制系统的主要时域性能指标;2.一阶系统分析:一阶系统在典型信号作用下的响应特征;3.二阶系统分析:二阶系统的数学模型;二阶系统的单位阶跃响应特征,欠阻尼二阶系统的性能指标;二阶系统的其它响应特征;了解二阶系统响应特性的改善方法;4.高阶系统分析:高阶系统时域响应的分量结构及意义;闭环极点与主导极点;高阶系统的二阶近似;5.控制系统的稳定性分析:线性系统稳定的基本概念;线性系统稳定的充分必要条件;劳斯稳定性判据及其应用;6.控制系统的误差分析:控制系统误差的概念与稳态误差的定义,典型信号作用下稳态误差的计算;误差的数学模型与稳态误差分析;扰动信号误差分析和稳态误差的补偿;(四)根轨迹法1.根轨迹的基本概念与根轨迹方程;2.绘制根轨迹图的基本法则;3.参数根轨迹的定义与基本绘制方法;4.附件加开环零极点对系统性能的影响;5.控制系统根轨迹的分析方法,根据根轨迹图分析系统的性能;(五)频率响应法1.系统频率特性的基本概念与求取方法;2.最小相位系统典型环节的频率特性分析;3.频率特性函数的图形:开环幅相曲线的绘制、Bode图的绘制与特性(由系统开环传递函数绘制Bode图,以及Bode图写出系统就、开环传递函数);4.Nyquist稳定判据:Nyquist图的粗略绘制与特性;Nyquist 稳定判据及其应用;5.对数频率稳定性判据,利用开环Bode图研究闭环系统的稳定性及其它特性;利用开环幅相曲线进行稳定性判定;6.稳定裕度:相角裕度、幅值裕度的定义与计算;7.闭环系统频域性能指标:频带宽度定义;频域性能指标与时域性能指标的转换;(六)控制系统的校正方法1.系统校正的概念与结构;2.常用校正装置:无源超前校正网络、无源滞后校正网络、无源滞后-超前校正网络的特性与参数计算;PID控制器的特性;3.频率法校正设计方法与基本思想4.串联超前校正与串联滞后校正的目的、思想与计算方法;5.串联滞后-超前校正的目的和基本思想;6.反馈校正的基本原理与特点;7.复合校正的基本概念与思想;(七)非线性系统分析1.非线性系统的特性、非线性系统分析设计的主要方法2.典型的本质非线性因素对系统运动的影响;3.相平面分析的基本概念;4.描述函数法的基本概念;非线性系统稳定性的描述函数分析;负倒描述函数概念。
813自动控制原理考试大纲
813自动控制原理考试大纲特别提示:需带无储存功能的计算器一、考试内容1. 自动控制的一般概念掌握自动控制系统的一般概念, 重点是开环控制和闭环控制的概念, 理解对控制性能的基本要求, 了解各种典型控制系统的工作原理及控制理论的发展过程。
2. 自动控制系统的数学模型掌握控制系统的数学模型的基本概念, 了解微分方程一般建立方法, 理解传递函数的定义和性质, 掌握动态结构图的建立和化简规则。
知识点为: 传递函数的定义和性质, 典型环节的传递函数, 动态结构图的建立, 动态结构图的化简, 自动控制系统的传递函数。
3. 自动控制系统的时域分析方法了解和掌握经典控制理论最基本的方法之一时域分析法, 能够用该方法分析控制系统的各种控制性能(包括稳定性, 快速性和稳态精度)。
知识点为: 典型控制过程及性能指标, 一阶系统分析, 二阶系统分析, 高阶系统的低阶化,稳定性与代数判据, 稳态误差分析。
4. 自动控制系统的频域分析方法要求掌握各种系统和环节的幅相频率特性和对数频率特性的画法, 并能通过频率特性分析控制系统的控制性能。
知识点为: 典型环节的频率特性,系统开环频率特性,乃奎斯特稳定判据及对数稳定判据,稳定裕度及计算,系统闭环频率特性。
5. 自动控制系统的校正装置综合在对控制系统的控制性能进行分析的基础上, 对控制性能的改进就涉及到系统的校正。
要求在建立控制系统校正的一般概念的基础上, 对串联校正, 反馈校正, 前置校正有较为全面的理解。
掌握频率法校正的一般方法。
知识点为: 控制系统校正的概念,串联校正、反馈校正和前置校正在校正中的应用。
二、考试题型(分值,按150分计)1、填空(25 分)2、简答题(15 分)3、计算及分析题(80分)4、综合应用题(30分)。
(完整)《自动控制原理》考试大纲概要
《自动控制原理》考试大纲一、考试对象电气工程及其自动化、测控技术与仪器等专业本科插班生二、考试目的《自动控制原理》课程考试旨在考察学生对自动控制系统的基本概念、基本原理及基本分析方法的掌握和运用,着重考察学生应用适当数学工具和基本原理,用不同方法对系统进行分析的能力.本门课程考核要求由低到高共分为“了解"、“掌握"、“熟练掌握”三个层次。
其含义:了解,指学生能懂得所学知识,能在有关问题中认识或再现它们;掌握,指学生清楚地理解所学知识(例如定理的条件与结论,公式的表述与使用范围等),并且能在基本分析和简单应用中正确地使用它们;熟练掌握,指学生能较为深刻理解所学知识,在此基础上能够准确、熟练地使用它们分析解决较为简单的实际问题。
三、考试方法和考试时间1、考试方法:(闭卷笔试)2、记分方式:百分制,满分为100分3、考试时间:120分钟4、试题总数:五大题(部分大题中含有若干个小题)5、命题的指导思想和原则命题的总的指导思想是:全面考查学生对本课程的基本原理、基本概念和主要知识点学习、理解和掌握的情况。
命题的原则是:最基本的知识一般要占60%左右,稍微灵活一点的题目要占20%左右,较难的题目要占20%左右,其中大多数是大题目。
客观性的题目占的分量较少。
6、题目类型(1)填空题(每题3分,约15分)(2)选择题(每题3分,约15分)(3)简答题(每题10分,约10分)(4)分析计算题(约40分)(5)作图题(每题10分,约20分)7、答题要求(1)简答题:只要求答出要点,如果本身所表示的意思不明确,则需要对要点稍作说明.若要点本身所表示的意思已经很明确,就无需再作说明。
(2)分析计算题:分析思路清晰,公式表述清楚;解题时思路清楚,步骤完整,格式规范化。
这类题一般按演算步骤记分,如果计算结果不对,但演算步骤对了,仍可得一定分数。
(3)作图题:要求作图步骤清楚,若图未做完,可按作图步骤得一定分数。
自动控制原理考研大纲

《自动控制原理》考研大纲科目名称:控制理论适用专业:仿生装备与控制工程参考书目:《自动控制原理》第六版,胡寿松编,科学出版社;《自动控制理论》第二版,邹伯敏编,机械工业出版社;《现代控制理论基础》第二版,王孝武主编,机械工业出版社考试时间:3小时考试方式:笔试总分:150分考试范围:包括经典控制理论(不包含非线性部分)与现代控制理论两部分,经典控制理论内容占70%,现代控制理论内容占30%。
经典控制理论部分第一章绪论1. 掌握自动控制系统的工作原理、自动控制系统的组成与几种不同分类。
2. 重点掌握反馈的概念、基本控制方式、对控制系统的基本要求。
第二章线性系统的数学模型控制理论的两大任务是系统分析与系统设计,系统分析和设计中首先要建立被研究系统的数学模型。
本章主要给出古典控制理论使用的系统数学模型——传递函数的建立。
本章要求:1.掌握的概念:传递函数;极点、零点;开环传递函数、闭环传递函数、误差传递函数;典型环节的传递函数。
2.重点掌握建立电气系统、机械系统的微分方程和传递函数模型的方法。
3.重点掌握方框图化简或信号流图梅森增益公式获得系统传递函数的建模方法。
第三章控制系统时域分析根据研究系统采用的不同数学模型,分析方法是不同的,本章给出利用系统传递函数数学模型求取时间响应的系统时域分析法。
主要是分析系统的三大基本性能,即系统的稳(稳定性)、准(准确性)、快(快速性)。
稳定性是系统工作的必要条件;快速性和相对稳定程度(振荡幅度)是评价系统动态响应的性能指标;准确性是指系统稳态响应的稳态精度,用稳态误差来衡量,需注意:讨论的稳态误差是指由输入信号和系统结构引起的系统稳态时的误差。
本章要求:1.掌握的概念:稳定性;动态(或暂态)性能指标(最大超调量、上升时间、峰值时间、调整时间);稳态(静态)性能指标(稳态误差);一阶、二阶系统的主要特征参量;欠阻尼、临界阻尼、过阻尼系统特点;主导极点。
2.重点掌握系统稳定性判别(Routh判据);稳态误差终值计算(包括三个稳态误差系数的计算);二阶系统动态性能指标计算。
武汉理工大学《自动控制原理》考试复习重点知识汇总
c(t) = −te−t − e−t + 1(t) = 1(t) − (1 + t)e−t t > 0
7,在本课程中引入拉氏变换不只是为了解微分方程,更重要的是通过它建立常参量线性系 统一种输入/输出描述的数学模型。
5
第二讲 系统的数学模型
2. 1. 基本要求 1.了解建立系统微分方程的一般方法,能对简单的机械网络和电路能列写出动态方程式。 2.掌握传递函数的概念及性质。 3.掌握典型环节的传递函数形式。 4.掌握由系统微分方程组建立动态结构图的方法。 5.掌握用动态结构图等效变换求传递函数和梅逊公式求传递函数的方法。 6.掌握系统的开环传递函数、闭环传递函数,对参考输入和对干扰的系统闭环传递函数及误 差传递函数的概念。
2. 2 重点讲解 1, 本章是建立常参量线性系统描述系统输入、输出关系的的两种数学模型:系统微分方程 式和传递函数,前者是时域描述,后者则是复数域的描述。建立系统的数学模型是一件非常 复杂的工作,它涉及对系统中每个部件的深入了解和专门的知识,这些都不是本课程可以解 决的问题。它要靠专业课学习和长期的工作实践的积累。这里只是介绍建立模型的一种思路 和原则步骤。
运用拉氏变换的线性性质和延迟定理,可得
L[
f
(t)]
=
L[t ⋅1(t)
− (t
− t0 ) ⋅1(t
− t0 ) − t0
⋅1(t
− t0 )]
=
1 s2
−
1 s2
e−t0s
−
t0 s
e−t0s
4,拉氏变换式的积分下限问题
拉氏变换的定义的积分下限为零,在工程实践中,应该有 0+ (零的右极限)和 0− (零的左
由式(1-1)直接可得( x = 0, y = 1, c = 2.55,θ = −78.7o )
武汉工程大学 考研《自动控制原理》考试大纲

武汉工程大学考研《自动控制原理》考试大纲《自动控制原理》是自动化、测控、电气工程及自动化等自动化类专业主要的专业基础课程之一,各校相关专业的研究生入学考试,都把《自动控制原理》作为一门独立的考试科目,用来衡量考生专业基础课的能力和水平。
由于该门课程涉及的知识面广、内容多、难度大,为了组织好该门课程的研究生入学考试,特制订本考试大纲。
一、制订本考试大纲的目的为了组织好该门课程的研究生入学考试,以便能真正选拔出优秀人才,一份好的试卷是不可缺少的,制订本考试大纲的目的就是保证要在大纲的范围内,命出一份质量好的试卷,保证研究生的入学质量。
二、主要参考书目胡寿松主编,科学出版社出版,《自动控制原理》第六版。
胥布工主编,电子工业出版社出版,《自动控制原理》。
刘豹主编,《现代控制理论》第三版(机械工业出版社)以及有关控制原理方面的书籍。
三、题量由于研究生入学考试一门课程一般规定为三个小时的答题时间,故应在原本科生该门课程结业考试题量的基础上,相应增加约三分之一的题量。
四、难易程度希望能使参加应试的学生平均分在110分(满分150分)左右,以免影响三门基础课在规定分数线上的学生的录取。
考虑到近年来生源质量等问题,考题以基本概念为主,难度系数较小。
五、试题类型选择题、填空题、简答题、计算题、作图题、证明题、分析题、综合题等都可作为试题的题型。
六、命题范围命题范围主要依据本课程本科教学大纲要求的教学内容命题,故包含经典控制理论(约85%)和现代控制理论(约15%)两大部分。
经典控制理论考核的目的是考查考生对该门课程掌握的深度和广度,故题可以适当地出得深一点、难一点、巧一点。
而现代控制理论部分考核的目的是考查考生对该门课程了解的广度,故试题应出得相对较容易。
具体范围如下:经典控制理论部分:(参考胡寿松主编,科学出版社出版,《自动控制原理》第六版。
胥布工主编,电子工业出版社出版,《自动控制原理》)第一章、控制系统的基本概念1、基本概念(相关名词术语)。
东电考研大纲841、842、843、844、845、846
(1)841 自动控制原理一、考试形式与试卷结构1、试卷满分及考试时间试卷满分为150分,考试时间为180分钟2、考试方式考试方式为闭卷、笔试3、试卷的题型结构选择填空题,分析计算题,综合设计题二、考察的知识及范围第一章自动控制系统导论内容:(1)自动控制系统的一般性概念和基本工作原理;(2)反馈控制系统的基本组成、分类及对控制系统的基本要求;(3)《自动控制原理》课程研究的主要内容及其发展现状。
重点掌握:自动控制系统的一般性概念和基本工作原理;反馈控制系统的基本组成、分类及对控制系统的基本要求第二章控制系统的数学模型内容:(1)复数和复变函数的基本概念,拉普拉斯变换和拉普拉斯反变换;(2)控制系统研究中几种主要数学模型:微分方程、传递函数和频率特性的内在联系;(3)典型环节的数学模型;(4)常见电气系统和一般机械系统的数学建模;(5)方块图的化简法则;(6)利用梅逊公式求取系统的传递函数。
重点掌握:传递函数的概念、结构图的建立与等效变换、梅逊公式第三章自动控制系统的时域分析内容:(1)系统阶跃响应性能指标;(2)一阶、二阶系统阶跃响应的特点及一阶、二阶系统动态性能;(3)高阶系统动态性能(4)线性系统稳定的充要条件;(5)利用劳斯判剧判别系统的稳定性;(6)稳态误差的定义;(7)稳态误差系数的求取及减小或消除系统稳态误差的方法;重点掌握:稳定性、稳态误差、系统阶跃响应的特点及动态性能与系统参数间的关系等有关概念,有关的计算方法。
第四章根轨迹法内容:(1)根轨迹的定义、幅值和相角条件;(2)根轨迹的绘制法则;(3)利用根轨迹分析系统的特性。
重点掌握:根轨迹的绘制方法,利用根轨迹分析系统的特性。
第五章线性系统的频域分析法内容:(1)频率特性的定义、求法及性质;(2)线性系统极坐标图画法;Nyquist图稳定判据的应用;(3)线性系统伯德图的画法;最小相位系统的定义及性质;(4)利用Bode图求取系统稳态误差;增益裕量和相位裕量的定义、物理意义和求取;重点掌握:正确理解频率响应、频率特性的概念及特点,明确频率特性的物理意义;熟练掌握运用奈奎斯特稳定判据和对数频率判据判定系统稳定性的方法;熟练掌握计算稳定裕度的方法。
武汉理工大学大二自动化专业自动控制原理试卷及答案
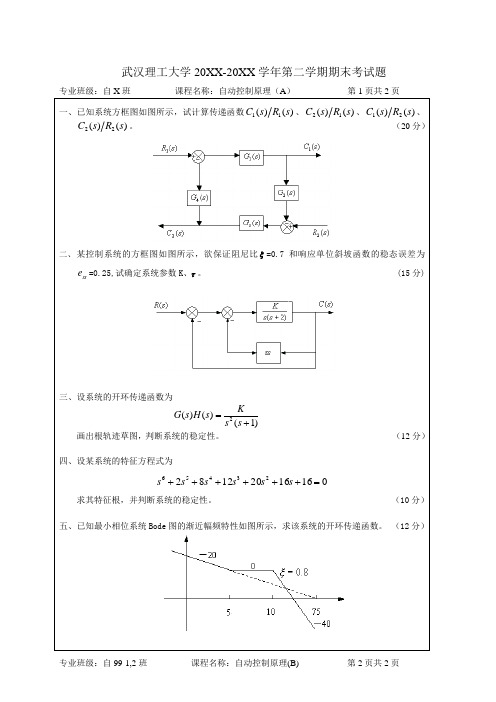
武汉理工大学20XX-20XX 学年第二学期期末考试题专业班级:自X 班 课程名称:自动控制原理(A ) 第1页共2页 一、已知系统方框图如图所示,试计算传递函数)()(11s R s C 、)()(12s R s C 、)()(21s R s C 、)()(22s R s C 。
(20分)二、 某控制系统的方框图如图所示,欲保证阻尼比ξ=0.7和响应单位斜坡函数的稳态误差为ss e =0.25,试确定系统参数K 、τ。
(15分)三、设系统的开环传递函数为)1()()(2+=s s K s H s G 画出根轨迹草图,判断系统的稳定性。
(12分)四、设某系统的特征方程式为0161620128223456=++++++s s s s s s求其特征根,并判断系统的稳定性。
(10分)五、已知最小相位系统Bode 图的渐近幅频特性如图所示,求该系统的开环传递函数。
(12分)专业班级:自99-1,2班 课程名称:自动控制原理(B) 第2页共2页六、已知单位反馈系统的开环传递函数为)(s G =)11.0(200+s s 试设计串联校正环节,使系统的相角裕度不小于︒45,剪切频率不低于50s rad /。
(16分)七、设某非线性系统如图所示,试确定其自振荡的振幅和频率。
(15分)答案一、解:求得传递函数如下:)()()()(1)()()(4321111s G s G s G s G s G s R s C -= (3分) )()()()(1)()()()()(432132112s G s G s G s G s G s G s G s R s C --= (3分) )()()()(1)()()()()(432143121s G s G s G s G s G s G s G s R s C -= (3分) )()()()(1)()()(4321322s G s G s G s G s G s R s C -= (3分) 二、解:sτK s K s G k )2()(2++= (2分) Ks τK s K s R s C +++=)2()()(2 (2分) Ks τK s s τK s s R s E +++++=)2()2()()(22 (2分) 25.02=+=K K e ss τ, (2分) K n =ω,τξωK n +=22 (4分)综合上面的式子,得186.0,36.31==τK (4分) 三、解:跟轨迹图(略)。
武汉理工大学《自动控制原理》考研出题老师课件

四、自动控制系统基本控制方式
1、开环控制方式 指控制装置与被控对象之间只有顺向作 用而没有反向联系的控制过程。
特点:系统的输出量不会对系统的控制 作用发生影响。
11
例1.下面是一个具体的开环控制系统的例子,
直流电机转速控制系统。
P 电 压 放 r 大 器 可 控 硅 功 放 电网电压
u
+
uk
ua
自动控制理论
武汉理工大学自动化学院
陈启宏 教授 E-mail: chenqh@
1
教材与参考书
教材
胡寿松,自动控制原理 ,北京:科学出版社,2001
参考书
夏德钤,自动控制原理 ,北京:机械工业出版 社 John J.D'azzo, Linear Control System Analysis and Design. 北京:清华大学出版社影印版
21
3.按系统的特性分类
a.线性系统(具有叠加性和齐次性,可以用线性微分方程 来描述) b.非线性系统(不适用叠加原理,用非线性方程来描述)
4.按信号的形式分类
a.连续控制系统 b.离散控制系统
22
1-4 对控制系统的基本要求
一、基本要求
尽管每个控制系统可能都有不同的特殊要求,但对每一 类系统被控量变化全过程提出的共同要求都是一样的,而且 可以归结为稳定性、快速性、准确性,即稳、准、快三个要 求。
23
当一个控制系统的输入信号突然发生跳变时,这时输出 量还处在原有的平衡状态,这样就出现了偏差,这个偏差 控制输出量达到新的平衡,这就是一个调节过程。
理想的调节过程是:出现偏差后,执行机构突然动作, 使输出量立即达到新的平衡状态,调节过程瞬时完成,实际 上这是不可能的,因为什么呢?惯性!
自动控制原理参考书与考试大纲
《自动控制原理》参考书与考试大纲一:参考书目:《自动控制原理》,厉玉鸣等主编,化学工业出版社,2009年《自动控制原理》,孙优贤,王慧主编,化学工业出版社,2011年《自动控制原理》,胡寿松主编,科学出版社,2007年二:考试大纲1、控制系统的基本组成和数学模型掌握:控制系统的组成;控制系统的主要类型;线性连续时间系统的概念,微分方程模型,传递函数模型;方块图及其等效变换;信号流图;方块图化简;Mason增益公式;2、控制系统的时域分析方法掌握:典型输入信号;一阶、二阶系统的动态响应;控制系统动态响应的质量指标;控制系统的劳斯稳定判据;给定和扰动稳态误差分析;了解:高阶系统的响应及主导极点;PID控制方法对系统控制质量的影响;4、频率特性分析法掌握:系统频率特性的定义;典型环节的频率响应;系统频率特性的极坐标图;对数坐标图;非最小相位系统;Nyquist稳定性判据;控制系统的稳定裕度;基于开环频率响应的控制系统频率特性分析;了解:频率特性设计方法;5、根轨迹分析方法掌握:根轨迹的基本概念;绘制根轨迹的基本条件和规则;控制系统的根轨迹分析;广义根轨迹;了解:基于根轨迹方法的控制系统设计;6、采样控制系统掌握:采样过程及采样定理;零阶保持器;Z变换;采样系统的脉冲传递函数;连续模型的离散化;采样系统的数学模型及求解;采样系统的稳定性与稳态偏差分析;了解:数字PID控制器;最小拍采样控制系统的设计;7、状态空间方法掌握:系统状态空间描述,及其与传递函数之间的相互转化;状态转移矩阵的求取及性质,状态运动分析(状态方程的解);能控性、能观性的定义与判别;单入单出系统的能控、能观标准型;按能控性或能观性结构分解;状态反馈设计与极点配置;全维状态观测器设计;带状态观测器的状态反馈;了解:最小阶状态观测器设计;规范分解(同时按能控与能观进行分解);8、非线性系统分析掌握:典型非线性环节;描述函数分析法,及自激振荡(极限环)的参数求取与稳定性分析;相平面分析法;Laypunov稳定性基本定义和基本理论;了解:典型非线性环节的描述函数计算;线性系统的Lyapunov稳定性分析;。
856自动控制原理考研大纲
856自动控制原理考研大纲【自动控制原理考研大纲】一、基本概念1. 控制系统的定义及组成。
控制系统是指通过采取某种控制手段,对被控对象的输出进行调节,使之能够按照预定要求进行工作,实现对系统的稳定运行和性能优化。
控制系统通常由被控对象、传感器、执行器、控制器和人机界面五个部分组成。
2. 反馈控制系统和开环控制系统的比较。
反馈控制系统以被控对象的输出作为系统操作的依据,通过不断监测系统的输出并与期望输出进行比较,从而调整系统的输入,使系统的输出与期望输出尽量接近。
开环控制系统则是直接根据系统的输入,不考虑系统的输出直接对被控对象进行操作,没有对系统操作效果进行反馈和调整的过程。
二、数学模型与传递函数1. 系统的数学建模方法。
系统的数学模型是通过对系统进行详细分析和合理假设,将实际系统转化为一组数学方程来描述系统的特性和行为。
数学建模方法主要有物理模型建模、状态空间模型建模和传递函数模型建模三种。
2. 传递函数及其性质。
传递函数是将系统的输入和输出之间的关系用一个分子多项式和一个分母多项式相除的形式来表示的比值。
传递函数具有线性、时不变、因果、稳定等性质。
3. 一阶惯性环节、二阶惯性环节及其传递函数。
一阶惯性环节的传递函数为G(s) = K/(Ts + 1),二阶惯性环节的传递函数为G(s) = K/(T2s^2 + 2ξTs + 1)。
其中K为增益,T为时间常数,ξ为阻尼比。
三、控制器设计1. 控制器设计的一般步骤。
控制器设计的一般步骤包括确定控制系统的目标、建立数学模型、选择控制策略、设计控制器、仿真与分析,并根据需求进行优化与调整。
2. P控制器、PI控制器、PD控制器及其特点。
P控制器根据偏差信号的大小进行线性放大来调整控制量,作用简单直观,但仅能实现系统的稳态精度要求。
PI控制器在P控制器的基础上加入了积分作用,增强了系统的鲁棒性和快速性能。
PD控制器在P控制器的基础上加入了微分作用,能够预测系统的未来变化趋势,提高系统的动态性能。
813自动控制原理考试大纲
813自动控制原理考试大纲085210控制工程专业一、考试目的本考试是全日制控制工程专业的专业硕士学位研究生的入学资格考试之专业基础课,各语种考生统一用汉语答题。
各招生院校根据考生参加本考试的成绩和其他三门考试的成绩总分来选择参加第二轮,即复试的考生。
二、考试的性质与范围本考试是测试考生自动控制原理的尺度参照性水平考试。
考试范围为本大纲规定的自动控制原理。
三、考试基本要求1. 掌握经典的自动控制原理的基本概念、时域与频域分析方法与校正方法。
2. 具备较强的C/C++语言或matlab语言的编程能力。
四、考试形式本考试采取单项技能测试与综合技能测试相结合的方法,通过主、客观试题考查考生对于自动控制原理的掌握程度。
五、考试内容本考试总分150分。
1. 考试要求考试内容主要涉及自动控制系统的基本概念,控制系统的数学模型,线性系统的时域分析法、根轨迹法与频域分析法,线性系统的校正方法,线性离散系统的分析与校正方法。
具体如下:1)控制系统的基本概念:包括基本控制方式、自动控制系统的分类与基本要求;2)控制系统的数学模型:包括微分方程描述,结构图与信号流图、传递函数、梅森公式;3)线性系统的时域分析方法:包括系统的时域性能指标、一阶系统时域分析、二阶系统时域分析、线性系统的稳定性分析、线性系统的稳态误差。
4)线性系统的根轨迹方法:包括根轨迹法的基本概念、根轨迹绘制的基本法则、广义根轨迹。
5)线性系统的频域分析方法:包括频率特性的基本概念、典型环节和开环频率特性、频率域稳定判据、稳定裕度。
6)线性系统的校正方法:包括系统的设计与校正问题、常用校正装置及其特性、串联校正、反馈校正的基本概念、复合校正中全补偿条件与近似补偿条件。
7)线性离散系统的分析与校正方法:包括离散系统的基本概念、信号的采样与保持,Z变换理论,离散系统的数学模型、稳定性与稳态误差、动态性能分析、数字校正等内容。
2. 题型问答题、计算题。
共计150分,考试时间为180分钟。
武汉理工2012考研大纲 848《自动控制原理》
《自动控制原理》硕士研究生入学考试大纲第一部分考试说明一.考试性质《自动控制原理》是为我校招收控制科学与工程专业、电力电子与电力传动专业、电机与电器专业及电工理论与新技术专业硕士研究生,以及全日制电气工程和控制工程设置的考试科目。
它的评价标准是高等学校优秀毕业生能达到良好及以上水平,以保证被录取者具有较扎实的专业基础。
考试对象为符合全国硕士研究生入学条件的报考我校自动化学院及工科相关专业的考生。
二.考试形式与试卷结构(一)答卷方式:闭卷,笔试;(二)答题时间:180分钟。
(三)题型:计算题、分析题(四)参考书目:1. 自动控制原理胡寿松编国防工业出版社2.自动控制原理王万良主编高教出版社第二部分考查要点(一)自动控制的一般概念1.自动控制和自动控制系统的基本概念,负反馈控制的原理;2.控制系统的组成与分类;3.根据实际系统的工作原理画控制系统的方块图。
(二)控制系统的数学模型1.控制系统微分方程的建立,拉氏变换求解微分方程。
2.传递函数的概念、定义和性质。
3.控制系统的结构图,结构图的等效变换。
4.控制系统的信号流图,结构图与信号流图间的关系,由梅逊公式求系统的传递函数。
(三)线性系统的时域分析1.稳定性的概念,系统稳定的充要条件,Routh稳定判据。
2.稳态性能分析(1)稳态误差的概念,根据定义求取误差传递函数,由终值定理计算稳态误差;(2)静态误差系数和动态误差系数,系统型别与静态误差系数,影响稳态误差的因素。
3.动态性能分析(1)一阶系统特征参数与动态性能指标间的关系;(2)典型二阶系统的特征参数与性能指标的关系;(3)附加闭环零极点对系统动态性能的影响;(4)主导极点的概念,用此概念分析高阶系统。
(四)线性系统的根轨迹法1. 根轨迹的概念,根轨迹方程,幅值条件和相角条件。
2. 绘制根轨迹的基本规则。
3. 0o 根轨迹。
非最小相位系统的根轨迹及正反馈系统的根轨迹的画法。
4. 等效开环传递函数的概念,参数根轨迹。
参考书目
参考书目001 机械自动化学院初试科目参考书目:818《液压与气压传动》(液压传动部分),陈奎生主编,武汉理工大学出版社,2001 年。
819《机械原理》(第二版),廖汉元、孔建益,机械工业出版社,2008 年。
或《机械原理》(第七版),孙桓、陈作模、葛文杰,高等教育出版社,2010 年。
820《工业工程基础》,蒋国璋主编,华中科技大学出版社,2010 年。
827《自动控制原理》,吴怀宇主编,华中科技大学出版社,2007 年。
复试科目参考书目:《机械工程测试技术基础》(第二版),熊诗波等主编,机械工业出版社,2008 年。
《机械工程控制基础》(第六版),杨叔子,华中科技大学出版社,2011 年。
《生产运作管理》,陈荣秋,机械工业出版社,2005 年。
002 材料与冶金学院初试科目参考书目:807《物理化学》(第五版),天津大学物理化学教研室,高等教育出版社,2009 年。
810《材料科学基础》,张代东、吴润主编,北京大学出版社,2011 年。
811《无机材料科学基础》(硅酸盐物理化学重排本),陆佩文编,武汉理工大学出版社,1996 年。
812《金属学与热处理》(第二版),崔忠圻、覃耀春主编,机械工业出版社,2008 年。
813《冶金传输原理》,沈巧珍主编,冶金工业出版社,2009 年。
814《钢铁冶金原理》 (第三版),黄希祜编著,冶金工业出版社或《冶金原理》,李洪桂主编,科学出版社,2005年。
815《材料科学基础》,张联盟、黄学辉、宋晓岚,武汉理工大学出版社,2008 年。
819《机械原理》(第二版),廖汉元、孔建益,机械工业出版社,2008 年。
或《机械原理》(第七版),孙桓、陈作模、葛文杰,高等教育出版社,2010 年。
842《大学物理》(第一版),廖耀发主编,高等教育出版社,2006 年。
843《传热学》(第四版),杨世铭编,高等教育出版社,2006 年。
复试科目参考书目:《金属材料学》,赵莉萍、吴润主编,北京大学出版社,2013 年。