ProE蜗轮的参数化建模
proe参数化建模
proe参数化建模简介(1)本教程分两部分,第一部分主要介绍参数化建模的相关概念和方法,包括参数的概念、参数的设置、关系的概念、关系的类型、如何添加关系以及如何使用关系创建简单的参数化零件(以齿轮为例)。
第二部分介绍参数化建模的其他方法:如族表的应用、如何使用UDF(用户自定义特征)、如何使用Pro/Program创建参数化零件。
(后一部分要等一段时间了,呵呵)参数化设计是proe重点强调的设计理念。
参数是参数化设计的核心概念,在一个模型中,参数是通过“尺寸”的形式来体现的。
参数化设计的突出有点在于可以通过变更参数的方法来方便的修改设计意图,从而修改设计意图。
关系式是参数化设计中的另外一项重要内容,它体现了参数之间相互制约的“父子”关系。
所以,首先要了解proe中参数和关系的相关理论。
一、什么是参数?参数有两个含义:●一是提供设计对象的附加信息,是参数化设计的重要要素之一。
参数和模型一起存储,参数可以标明不同模型的属性。
例如在一个“族表”中创建参数“成本”后,对于该族表的不同实例可以设置不同的值,以示区别。
●二是配合关系的使用来创建参数化模型,通过变更参数的数值来变更模型的形状和大小。
二、如何设置参数在零件模式下,单击菜单“工具”——参数,即可打开参数对话框,使用该对话框可添加或编辑一些参数。
1.参数的组成(1)名称:参数的名称和标识,用于区分不同的参数,是引用参数的依据。
注意:用于关系的参数必须以字母开头,不区分大小写,参数名不能包含如下非法字符:!、”、@和#等。
(2)类型:指定参数的类型∙a)整数:整型数据∙b)实数:实数型数据∙c)字符型:字符型数据∙d)是否:布尔型数据。
(3)数值:为参数设置一个初始值,该值可以在随后的设计中修改(4)指定:选中该复选框可以使参数在PDM(Product Data Management,产品数据管理)系统中可见(5)访问:为参数设置访问权限。
∙a)完全:无限制的访问权,用户可以随意访问参数∙b)限制:具有限制权限的参数∙c)锁定:锁定的参数,这些参数不能随意更改,通常由关系式确定。
PROE_蜗轮蜗杆的参数化建模

蜗轮蜗杆的创建蜗杆的创建:在PRO/E 中使用参数化创建蜗杆,具体操作步骤如下:1.创建新的零件文件:File/New →【输入零件名称:wogan,取消Use default template 的选中记号,然后单击OK 按钮】→【选择公制单位mmns_part_solid后单击OK按钮】→【基准坐标系PRT_CSYS_DEF及基准面RIGHT、TOP、FRONT显示在画面上】2.参数的输入Tools/Program…/Edit Design→【打开记事本,在INPUT和END INPUT 之间以及RELATION和END RELATION 之间添加输入参数如下,然后存盘,并退出记事本】INPUTM NUMBER ;模数Z1 NUMBER ;蜗杆头数Z2 NUMBER ;蜗轮齿数DIA1 NUMBER ;蜗杆分度圆直径(标准系列值)LEFT YES_NO ;旋向,YES表示左旋,否则为右旋END INPUTRELATIONSDIA2=M*Z2 ;蜗轮分度圆直径L=(11+0.06*Z2)*M ;蜗杆有效螺旋线长度END RELATIONS→【信息窗口出现“Do you want to incorporate your changes into the model:【YES】”,选择YES,以便输入参数值】→【Enter→Select All,根据信息窗口提示,各参数赋初值如下】M = 2.5Z1 = 1Z2 = 30DIA1 = 28旋向暂不输入,后期处理。
各参数的建立和赋值结束。
3.生成螺旋体Insert/Helical Swee.Protrusion…→【出现“螺旋扫描”对话框,接受属性子菜单中各默认选项,包括Constant(等导程)、ThruAxis(截面通过旋转轴线)、Right Handed(右旋) →Done】→【进入扫描廓型创建画面,绘制图7-2所示直线(尺寸如图),并绘制回转轴线】→【Tools/Relations→显示参数符号如图7-3所示,并出现Relationship对话框】→【在对话框内输入:sd3=L;sd4=L/2;sd1=DIA1/2→OK】→【单击图标,进入导程设定→在导程设定窗口输入导程值M*PI*Z1→点击图标】→【进入截面绘制画面,绘制图7-4所示截面图形(尺寸如图)】→【Tools/Relations→显示参数符号如图7-5所示,并出现Relations对话框】→【在对话框内输入:sd61=1.25*M;sd62=M;sd63=M*PI/2-2*M*tan(20) →OK】→【单击图标→OK,生成螺旋体如图所示,】4.导程参数化上述造型过程中,各参数除导程外均已实现参数化,下面对导程实施参数化。
PROE-蜗轮蜗杆的参数化建模
PROE-蜗轮蜗杆的参数化建模蜗轮蜗杆的创建蜗杆的创建:在PRO/E 中使用参数化创建蜗杆,具体操作步骤如下:1.创建新的零件文件:File/New →【输入零件名称:wogan,取消Use default template 的选中记号,然后单击OK按钮】→【选择公制单位mmns_part_solid后单击OK按钮】→【基准坐标系PRT_CSYS_DEF及基准面RIGHT、TOP、FRONT显示在画面上】2.参数的输入Tools/Program…/Edit Design→【打开记事本,在INPUT和END INPUT 之间以及RELATION和END RELATION 之间添加输入参数如下,然后存盘,并退出记事本】INPUTMNUMBER;模数Z1NUMBER;蜗杆头数Z2NUMBER;蜗轮齿数DIA1NUMBER;蜗杆分度圆直径(标准系列值)LEFTYES_NO;旋向,YES表示左旋,否则为右旋END INPUTRELATIONSDIA2=M*Z2 ;蜗轮分度圆直径L=(11+0.06*Z2)*M ;蜗杆有效螺旋线长度END RELATIONS→【信息窗口出现“Do you want to incorporate your changes into the model:【YES】”,选择YES,以便输入参数值】→【Enter→Select All,根据信息窗口提示,各参数赋初值如下】M = 2.5 Z1 = 1Z2 = 30DIA1 = 28旋向暂不输入,后期处理。
各参数的建立和赋值结束。
3.生成螺旋体Insert/Helical Swee.Protrusion…→【出现“螺旋扫描”对话框,接受属性子菜单中各默认选项,包括Constant(等导程)、ThruAxis(截面通过旋转轴线)、Right Handed(右旋) →Done】→【进入扫描廓型创建画面,绘制图7-2所示直线(尺寸如图),并绘制回转轴线】→【Tools/Relations→显示参数符号如图7-3所示,并出现Relationship对话框】sd3=L;sd4=L/2;sd1=DIA1/2→OK】→【单击图标,进入导程设定→在导程设定窗口输入导程值M*PI*Z1→点击图标】形(尺寸如图)】→【Tools/Relations→显示参数符号如图7-5所示,并出现Relations对话框】→【在对话框内输入:sd61=1.25*M;sd62=M;sd63=M*PI/2-2*M*tan(2 0) →OK】→【单击图标→OK,生成螺旋体如图所示,】4.导程参数化上述造型过程中,各参数除导程外均已实现参数化,下面对导程实施参数化。
PROE-蜗轮蜗杆的参数化建模

蜗轮蜗杆的创建蜗杆的创建:在PRO/E 中使用参数化创建蜗杆,具体操作步骤如下:1.创建新的零件文件:→【输入零件名称:wogan,取消Use default template 的选中记号,然后单击OK按钮】→【选择公制单位mmns_part_solid后单击OK按钮】→【基准坐标系PRT_CSYS_DEF及基准面RIGHT、TOP、FRONT显示在画面上】2.参数的输入Tools/Program…/Edit Design→【打开记事本,在INPUT和END INPUT 之间以及RELATION和END RELATION 之间添加输入参数如下,然后存盘,并退出记事本】INPUTM NUMBER ;模数Z1 NUMBER ;蜗杆头数Z2 NUMBER ;蜗轮齿数DIA1 NUMBER ;蜗杆分度圆直径(标准系列值)LEFT YES_NO ;旋向,YES表示左旋,否则为右旋END INPUTRELATIONSDIA2=M*Z2 ;蜗轮分度圆直径L=(11+0.06*Z2)*M ;蜗杆有效螺旋线长度END RELATIONS→【信息窗口出现“Do you want to incorporate your changes into the model:【YES】”,选择YES,以便输入参数值】→【Enter→Select All,根据信息窗口提示,各参数赋初值如下】M = 2.5Z1 = 1Z2 = 30DIA1 = 28旋向暂不输入,后期处理。
各参数的建立和赋值结束。
3.生成螺旋体Insert/Helical Swee.Protrusion…→【出现“螺旋扫描”对话框,接受属性子菜单中各默认选项,包括Constant(等导程)、ThruAxis(截面通过旋转轴线)、Right Handed(右旋) →Done】→【进入扫描廓型创建画面,绘制图7-2所示直线(尺寸如图),并绘制回转轴线】→【Tools/Relations→显示参数符号如图7-3所示,并出现Relationship对话框】→【在对话框内输入:sd3=L;sd4=L/2;sd1=DIA1/2→OK】→【单击图标,进入导程设定→在导程设定窗口输入导程值M*PI*Z1→点击图标】→【进入截面绘制画面,绘制图7-4所示截面图形(尺寸如图)】→【Tools/Relations→显示参数符号如图7-5所示,并出现Relations对话框】→【在对话框内输入:sd61=1.25*M;sd62=M;sd63=M*PI/2-2*M*tan(20) →OK】→【单击图标→OK,生成螺旋体如图所示,】4.导程参数化上述造型过程中,各参数除导程外均已实现参数化,下面对导程实施参数化。
PROE蜗轮蜗杆的参数化建模
PROE蜗轮蜗杆的参数化建模蜗轮蜗杆传动是一种常用的传动方式,在机械系统中有广泛的应用。
蜗轮蜗杆传动具有传递大扭矩的特点,能够将输入轴的高速运动转化为输出轴的低速高扭矩运动。
为了实现对蜗轮蜗杆传动的参数化建模,需要考虑蜗轮、蜗杆和传动比等参数。
首先,我们需要确定蜗杆的基础参数。
蜗杆是一种螺旋行星轮,具有螺旋齿。
蜗杆的主要参数包括螺旋角、导程、齿宽等。
螺旋角是蜗杆轴线上的螺旋线与轴线的夹角,导程是螺旋线的一个周期所对应的轴向长度。
齿宽是蜗杆螺旋线上的齿顶宽度。
这些参数的大小会直接影响蜗杆传动的传动效率和承载能力。
其次,我们需要确定蜗轮的基础参数。
蜗轮是与蜗杆啮合的齿轮,在蜗轮蜗杆传动中起到传递力矩和转速的作用。
蜗轮的主要参数包括齿数、模数、压力角等。
齿数是蜗轮上的齿的数量,模数是齿轮齿条上一个齿的尺寸。
压力角是齿轮齿条齿廓的斜率。
这些参数决定了蜗轮的几何形状和传动性能。
最后,我们需要确定蜗轮蜗杆传动的传动比。
传动比是指输入轴转速与输出轴转速之间的比值。
在蜗轮蜗杆传动中,传动比与蜗杆的导程和蜗轮的齿数之间有直接的关系。
传动比越大,输出轴的转速越低,扭矩越大。
传动比的选择需要考虑到机械系统的要求和设计要素。
了解了蜗轮、蜗杆和传动比等参数后,我们可以进行蜗轮蜗杆传动的参数化建模。
首先,确定蜗杆和蜗轮的基本参数,根据设计要求和传动比确定具体数值。
然后,根据蜗杆和蜗轮的参数,计算出蜗杆周速度、蜗轮周速度和传动比。
根据计算结果,可以进一步确定蜗轮蜗杆传动的传动效率、承载能力和传动精度。
在参数化建模的过程中,可以利用现代计算机辅助设计软件,通过数学模型和三维图形表示等方法,对蜗轮蜗杆传动进行仿真和分析。
通过仿真和分析,可以对蜗轮蜗杆传动的性能进行优化和改进。
通过参数化建模,可以实现对蜗轮蜗杆传动的快速设计和优化,提高传动效率和工作性能。
通过以上建模过程,可以实现对蜗轮蜗杆传动参数化建模。
这种建模方法可以提高设计效率,优化设计结果,满足机械系统对传动性能要求。
蜗轮蜗杆副的三维参数化建模及有限元分析

第34卷第2期机电产品开发与创新Vol.34,No.2 2021年3月Development&Innovation of M achinery&E lectrical P roducts Ma&.,2021文章编号:1002-6673(2021)02-070-03蜗轮蜗杆副的三维参数化建模及有限元分析王洋洋(许昌职业技术学院,河南许昌461000)摘要:随着机械制造技术的快速发展,由于蜗杆传动机构具有传动比大,传动平稳和具有自锁性等一系列优点,被广泛的应用在机械传动中$ZA蜗杆传动由于具有加工和测量方便等独特的优势,因此应用更为广泛$所以,ZA蜗轮蜗杆参数化建模的研究,对于蜗杆传动机构的理论研究和产品开发具有重要意义$本文以精密板式过滤机中减速器的蜗轮蜗杆为研究对象,探讨了ZA蜗轮蜗杆参数化建模和有限元分析等相关问题。
关键词:ZA蜗轮蜗杆&三维建模&参数化&有限元分析中图分类号:TH132文献标识码:A doi:10.3969/j.iss2.1002-6673.2021.02.022Worm and Worm Gear3D Parametric Modeling and Finite Element AnalysisWA'NG Yang-Yang(Xuchang Vocational Technical College,Xu.chang Henan461000,China)Abstract:With the rapid development of manufacturing technology,worm gear and worm drive mechanism is widely used in mechanical transmission because of its high transmission ration,compact structure,reliable transmission stability,self-lock and so on.Especially,the ZA worm drive mechanism is used more widely with its advantage of easy machining and measuring.Therefore,parametiic model building and study which based on ZA worm drive mechanism is greatly meaningful to research the theory and develop the product.In this paper,I will take ZA worm gearing to research parametric design and Finite element analysis.Keywords:ZA worm and worm gear;3D modeling;parameterized;0引言蜗杆传动属于机械传动中的一种重要的传动方法,它是一种在空间交错轴间传递运动和动力的机构,它的轴线相错角可以为任何角度,但在绝大多数情况下,轴交角选为90叫蜗杆传动的主要特点有:①结构紧凑,传动比大,采用一级蜗杆传动就可以实现很大的传动比。
proe5.0涡轮的建模过程
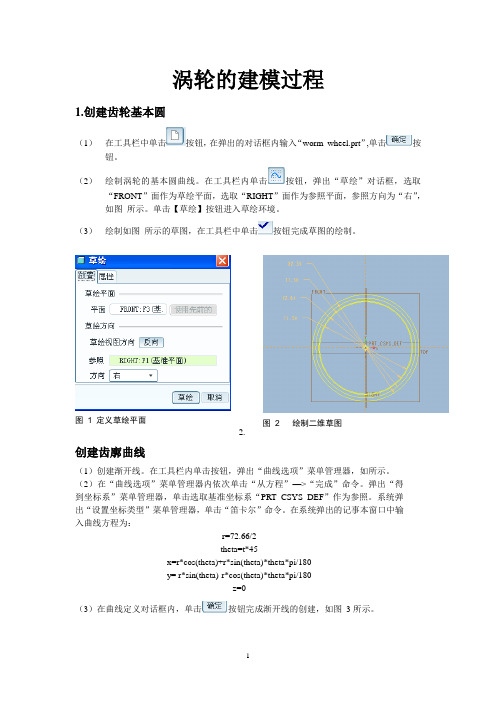
涡轮的建模过程1.创建齿轮基本圆(1) 在工具栏中单击按钮,在弹出的对话框内输入“worm_wheel.prt ”,单击按钮。
(2)绘制涡轮的基本圆曲线。
在工具栏内单击按钮,弹出“草绘”对话框,选取“FRONT ”面作为草绘平面,选取“RIGHT ”面作为参照平面,参照方向为“右”,如图 所示。
单击【草绘】按钮进入草绘环境。
(3) 绘制如图 所示的草图,在工具栏中单击按钮完成草图的绘制。
2.创建齿廓曲线(1)创建渐开线。
在工具栏内单击按钮,弹出“曲线选项”菜单管理器,如所示。
(2)在“曲线选项”菜单管理器内依次单击“从方程”—>“完成”命令。
弹出“得到坐标系”菜单管理器,单击选取基准坐标系“PRT_CSYS_DEF ”作为参照。
系统弹出“设置坐标类型”菜单管理器,单击“笛卡尔”命令。
在系统弹出的记事本窗口中输入曲线方程为:r=72.66/2theta=t*45x=r*cos(theta)+r*sin(theta)*theta*pi/180 y= r*sin(theta)-r*cos(theta)*theta*pi/180z=0(3)在曲线定义对话框内,单击按钮完成渐开线的创建,如图 3所示。
图 1 定义草绘平面图 2 绘制二维草图(4)镜像渐开线。
在工具栏内单击按钮,创建分度圆曲线与渐开线的交点,如图4所示。
(5)在工具栏内单击按钮,弹出“基准轴”对话框,按如图 5所示的设置创建基准轴。
(6)在工具栏内单击按钮,弹出“基准平面”对话框,按如图 6所示的设置创建基准平面。
(7)在工具栏内单击按钮,弹出“基准平面”对话框,按如图 7所示设置创建基准平面,在“旋转”文本框内输入旋转角度为“-360/(4*30)”,在“基准平面”对话框内单击【确定】按钮完成基准平面的创建。
(8)单击选取渐开线,在工具栏内单击按钮,系统弹出“镜像”操控面板,单击选取“DTM2”面作为参照平面,单击按钮完成渐开线的创建,如图 8所示。
proe如何画蜗轮蜗杆+prt+视屏
Proe如何画蜗轮蜗杆设计思路1.确定减速比i=Z2/Z1(本设计Z1=2,Z1=40)=40/2=20 . 22.选定模数-确定蜗杆直径系数和蜗杆尺寸 (3)3.计算中心距 (5)4.涡轮尺寸表 (6)5蜗轮蜗杆主要参数与尺寸计算 (7)6.蜗轮蜗杆的画法 (9)7.proe图中数据详解 (9)8.prt附件和视频附件 (11)Proe 如何画蜗轮蜗杆设计思路 (注,下载后可以打开prt 文件和视屏) 1.确定减速比i=Z2/Z1(本设计Z1=2,Z1=40)=40/2=20(1) 头数Z1 从蜗杆的端面看有几条出来的螺旋线就是几头了蜗杆上只有一条螺旋线的称为单头蜗杆,即蜗杆转一周,蜗轮转过一齿,若蜗蜗杆头数杆上有两条螺旋线,就称为双头蜗杆,即蜗杆转一周,蜗轮转过两个齿。
依此类推,设蜗杆头数用Z1表示(一般Z1=1、2、4),蜗轮齿数用Z2表示。
从传动比公式可以看出,当 Z1=1,即蜗杆为单头,蜗杆须转一转蜗轮才转一齿,因而可得到很大传动比,一般在动力传动中,取传动比I=10-80;在分度机构中,I 可达1000。
这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。
一般来说,蜗杆头数越多,传动效率越高,但加工会更加困难。
蜗杆的头数又可以叫做蜗杆的条数。
i=蜗杆转速n1蜗轮转速n2 =蜗轮齿数z2蜗杆头数z1(2)齿数Z2 利用减速比和查表得出(具体表格详见涡轮尺寸表)2.选定模数-确定蜗杆直径系数和蜗杆尺寸(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A选取模数m=4(也可以根据需要选取其他值)分度圆直径d1=40.蜗杆直径系数q=103.计算中心距得a=40+160/2=1004.涡轮尺寸表特性系数:蜗杆的分度圆直径与模数的比值称为蜗杆特性系数。
基于Pro_Engineer+Wildfire的蜗轮参数化设计

万方数据准轴WORM—GEAR—AXIS于FRONT平面与TOP平面交线上;建立基准轴A。
于RIGHT平面及DTMI平面交线上:建立坐标系CSO,TOP、RIGHT与FRONT分别为其坐标平面;建立坐标系CSl,DTMI、RIGHT与FRONT分别为其坐标平面;建立坐标系CS2,相对CSI绕轴A1旋转角度D2。
输入360/(4*Z2)一180*tan(alpha—t)/pi+alpha—t,即D2的值。
其中:alpha—t=atan(tan(alpha)/cos(gamma))(alphat为蜗杆端面齿形角)gamma=atan(zl/q)(gamma为蜗杆分度圆导程角)gamma=beta(beta为蜗轮螺旋角)2.3创建蜗轮的基本圆选择FRONT面为草绘面,在CSI坐标系下草绘蜗轮分度圆、基圆、齿顶圆、齿根圆基准曲线。
在“关系”中添加相应的关系式如:GAMMA=ATAN(Z1/Q)B更XIA=GAMMAALPHAT=ATAN(TAN(AIpHA)/COS(BETA))S=PI*Z1*MDO=M*Q/2D1=M*(Q+z2+2*X2)/2D2=360/(4*z2)一180*TAN(ALPHAT)/PI+AL—PHA..TD3=M*Z2/D3为分度圆直径134=M*Z2+2*M*(HA+x2)/D4为齿顶圆直径D5=M*Z2*COS(ALPHA.T)/D5为基圆直径D6=M-X"Z2—2*M*(HA—X2+c)/D6为齿根圆直径D8=ASIN(M*Q*TAN(BETA)/D5)DIO=ASIN(M*Q*TAN(BETA)/D5)2.5创建投影扫描轨迹线首先以DTMI平面为草绘平面,以RIGHT平面为参照,绘制旋转扫描轨迹曲线,半径为蜗杆分度圆半径,中心至轴A,的距离为蜗轮蜗杆中心距D。
,如图l所示,以轴A,为旋转轴旋转生成旋转曲面肘。
再以DTMI平面为草绘平面,以RIGHT平面为参照。
草绘直线I,直线1与轴A。
PROE_蜗轮蜗杆的参数化建模
PROE_蜗轮蜗杆的参数化建模蜗轮蜗杆是一种常见的传动机构,常用于工业机械设备中。
在进行参数化建模时,首先需要确定蜗轮蜗杆的几何形状,并根据其几何参数进行建模。
蜗轮蜗杆的几何形状可以通过以下几个参数进行描述:1.蜗杆的螺旋角:蜗杆是一种螺旋线形状的圆柱体,螺旋角是指螺旋线与轴线的夹角。
可以通过设置螺旋角大小来改变蜗杆的高低程度。
2.蜗杆的螺距:螺距是指螺旋线在轴线上的走过的距离与螺旋线的圈数之比。
可以通过设置螺距来改变螺旋线的紧密程度。
3.蜗杆的螺纹方向:蜗杆的螺纹可以是向上螺旋或向下螺旋。
蜗轮的传动性质与蜗杆螺纹方向有关,需要根据实际需求来确定。
4.蜗轮的齿数:蜗轮是一种圆盘形状,上面有一定数量的齿。
蜗轮的齿数决定了每转一圈蜗杆,蜗轮旋转的角度。
在进行参数化建模时,可以通过以上几个参数来描述蜗轮蜗杆的几何形状。
可以使用计算机辅助设计软件,比如SolidWorks等,来进行建模。
首先,可以通过设置螺旋角和螺距来创建蜗杆的螺旋线。
选择绘制螺旋线命令,根据设定的参数来创建螺旋线的起点、结束点和升高程度。
根据螺杆的螺旋角和螺距可以确定其几何形状。
然后,可以通过创建蜗轮的圆盘形状,并设置其齿数。
选择绘制圆盘命令,根据设定的齿数来创建蜗轮的圆盘形状。
根据蜗轮的齿数可以确定每转一圈蜗杆,蜗轮旋转的角度。
最后,通过将蜗杆和蜗轮进行组装,将蜗杆的螺旋线与蜗轮的齿相匹配,完成蜗轮蜗杆的参数化建模。
除了以上几个基本参数,还可以根据实际需求添加其他参数,比如蜗轮蜗杆的尺寸、材料等。
通过参数化建模,可以方便地调整蜗轮蜗杆的几何形状,从而满足不同的传动要求。
ProE 参数化蜗杆的制作过程
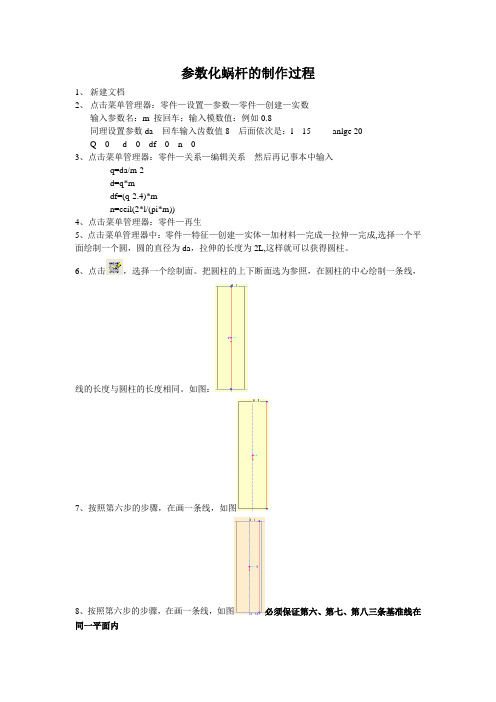
参数化蜗杆的制作过程1、新建文档2、点击菜单管理器:零件—设置—参数—零件—创建—实数输入参数名:m 按回车;输入模数值:例如0.8同理设置参数da 回车输入齿数值8 后面依次是:l 15 anlge 20Q 0 d 0 df 0 n 03、点击菜单管理器:零件—关系—编辑关系然后再记事本中输入q=da/m-2d=q*mdf=(q-2.4)*mn=ceil(2*l/(pi*m))4、点击菜单管理器:零件—再生5、点击菜单管理器中:零件—特征—创建—实体—加材料—完成—拉伸—完成,选择一个平面绘制一个圆,圆的直径为da,拉伸的长度为2L,这样就可以获得圆柱。
6、点击,选择一个绘制面。
把圆柱的上下断面选为参照,在圆柱的中心绘制一条线,线的长度与圆柱的长度相同。
如图:7、按照第六步的步骤,在画一条线,如图8、按照第六步的步骤,在画一条线,如图必须保证第六、第七、第八三条基准线在同一平面内9、点击菜单管理器中:零件—特征—创建—曲面—新建—高级—可变界面的扫描—完成,选取轨迹—曲线链,把第六步创建的线作为原始轨迹,把第七步创建的线作为x轨迹,然后完成,系统自动变到草绘界面,把圆选为参照,绘制如图的线然后选择草绘—关系—增加关系,输入sd#=trajpar*360*n,然后点击确定。
10、点击,选择从边界—完成,选择第九步中建立曲面的边界线,完成;再选择边界线的两个端点,然后点击接受,输入延伸距离值为0,然后就是完成—完成—确认延拓。
即获得曲面的边界曲线。
11、点击菜单管理器中:零件—特征—创建—切减材料—扫描—完成,点击选取轨迹,选择第十步中建立的曲线,然后绘制如图的草绘注意中间的虚线部分是参照第七步中的曲面而设置的,运用参数输入(2.24)sd#=df/2,(20)sd#=angle,另外一个尺寸sd#=pi*m/2。
proe如何画蜗轮蜗杆+prt+视屏
Proe如何画蜗轮蜗杆设计思路1.确定减速比i=Z2/Z1(本设计Z1=2,Z1=40)=40/2=20 . 22.选定模数-确定蜗杆直径系数和蜗杆尺寸 (3)3.计算中心距 (5)4.涡轮尺寸表 (6)5蜗轮蜗杆主要参数与尺寸计算 (7)6.蜗轮蜗杆的画法 (9)7.proe图中数据详解 (9)8.prt附件和视频附件 (11)Proe 如何画蜗轮蜗杆设计思路 (注,下载后可以打开prt 文件和视屏) 1.确定减速比i=Z2/Z1(本设计Z1=2,Z1=40)=40/2=20(1) 头数Z1 从蜗杆的端面看有几条出来的螺旋线就是几头了蜗杆上只有一条螺旋线的称为单头蜗杆,即蜗杆转一周,蜗轮转过一齿,若蜗蜗杆头数杆上有两条螺旋线,就称为双头蜗杆,即蜗杆转一周,蜗轮转过两个齿。
依此类推,设蜗杆头数用Z1表示(一般Z1=1、2、4),蜗轮齿数用Z2表示。
从传动比公式可以看出,当 Z1=1,即蜗杆为单头,蜗杆须转一转蜗轮才转一齿,因而可得到很大传动比,一般在动力传动中,取传动比I=10-80;在分度机构中,I 可达1000。
这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。
一般来说,蜗杆头数越多,传动效率越高,但加工会更加困难。
蜗杆的头数又可以叫做蜗杆的条数。
i=蜗杆转速n1蜗轮转速n2 =蜗轮齿数z2蜗杆头数z1(2)齿数Z2 利用减速比和查表得出(具体表格详见涡轮尺寸表)2.选定模数-确定蜗杆直径系数和蜗杆尺寸(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A选取模数m=4(也可以根据需要选取其他值)分度圆直径d1=40.蜗杆直径系数q=103.计算中心距得a=40+160/2=1004.涡轮尺寸表特性系数:蜗杆的分度圆直径与模数的比值称为蜗杆特性系数。
蜗杆的三维参数化建模

蜗杆的三维参数化建模下面通过创建具体实例来说明利用Pro/E软件设计阿基米德蜗杆类零件的方法与一般过程。
1.新建文件(1)执行[新建]菜单命令,打开[新建]对话框。
在[名称]文本框输入文件名“wogan”,单击取消[使用缺省模板]复选框的缺省选中状态,保持该对话框中其他缺省设置不变,单击[确定]按钮。
(2)在打开的[新文件选项]对话框中单击选取“mmns-part-solid”选项,单击[确定]按钮,进入零件环境。
2.创建参数(1)打开[参数]对话框。
单击[参数]对话框中的[添加新参数]按钮,输入蜗杆的模数,参数名称取为“M”,保持缺省的“实数”类型不变,将“值”数值为“4”。
输入蜗杆头数“Z”,将“值”数值为“1”。
输入齿形角“ALPHA”,将“值”数值为“20”。
输入蜗杆直径系数“Q”,将“值”数值为“10”。
输入顶隙“C*”,将“值”数值为“0.25”。
输入齿顶高“HA*”,将“值”数值为“1”。
输入基圆导程角“ ”,将“值”数值为“11.309”。
如图2-1图2-1(2)单击[参数]对话框中的[确定]按钮,关闭[参数]对话框。
3.创建关系式(1)依次执行[工具]| [关系]菜单命令,打开[关系]对话框,在[关系]文本框做输入下面的关系式,按“Enter"键换行。
蜗杆分度圆直径:d=m*q=4*10=40mm蜗杆齿顶圆直径:da=d+2*ha=40+2*m=48mm蜗杆齿根圆直径:df=d1-2*hf=40-2*1.2*m=30.4mm蜗杆齿顶高系数:ha*=m蜗杆齿根高系数:hf*=1.2m蜗杆齿高:h=1/2*(da-df)蜗杆齿宽:b=0.75*da蜗杆轴向齿距:pa=m*π=3.14*4=12.566mm螺距:s=d1*π*tg(11.309)=25.132mm(2)输入完成后,单击[关系]对话框中的[确定]按钮,完成关系式的创建。
4.创建圆柱蜗杆坯料(1)单击按钮,激活操控板。
蜗轮参数化设计(creo2.0)

creo2.0蜗杆参数化设计工具,参数q 10 蜗杆直径m 2 模数z1 4 蜗杆头数 z2 40 蜗轮齿数l 40 蜗杆长度x2 0 蜗轮变位系数alpha 20 齿形角gamma 0 蜗杆分度圆导程角ha1 0 蜗杆齿顶高hf1 0 蜗杆齿根高 hf2 0 蜗轮齿根高 s 0 蜗杆导程 tx 0la 0alpha_t 0 蜗杆轴向压力角工具,关系gamma=atan(z1/q)ha1=mhf1=1.2*mhf2=(1.2-x2)*ms=pi*z1*mtx=ceil(l/s)la=tx*m*z1*pialpha_t=atan(tan(alpha)/cos(gamma))1. 建立基准平面DTM1:选TOP 平面往下偏距,编辑关系d0=(m*z2-m*q)/22. 建立基准轴A1: FRONT 平面与TOP 的相交。
3. 建立基准轴A2: RIGHT 平面与DTM1的相交。
4. 建立直角坐标系CS0: x 垂直与top 平面向上,y 垂直与front 平面向外,z 垂直与right 平面向右,系统自动在原默契认坐标处满足所指定的方向生成坐标系CS0 (隐藏原默认参考坐标可以看到)5. 建立直角坐标系CS1: x 垂直与DTM1平面向上,y 垂直与right 平面向右,z 垂直与front 平面向里。
6. 建立直角坐标系CS2,参照为CS1,相对Z 轴旋转角度负50度(前视图看逆时针方向旋转),隐藏坐标CS1,对刚才任意的角度,添加关系: D3=360/(4*Z2)+180*TAN(ALPHA_T)/PI-ALPHA_T7.建立螺旋线,圆柱坐标系,参考坐标为CS0,方程如下:r=m*q/2theta=-t*tx*360 (这里用负号表示螺旋线为右旋)z=-t*la8. 草绘曲线,草绘平面为front,朝内, Rhght基准面为右参照,,轴A_2为草绘参照。
画四个同心圆,圆心在A2轴线上,从内到外标注,假设尺寸代号为d13,d14,d15,d16, 并建立关系d15=M*Z2d13=D15*COS(ALPHA_T)d14=D15-2.4*Md16=D15+2*M9.建立蜗杆基圆渐开线,笛卡尔坐标系为CS2,方程为:r=m*z2*cos(alpha_t)/2theta=t*60x=r*cos(theta)+r*sin(theta)*theta*pi/180y=r*sin(theta)-r*cos(theta)*theta*pi/180z=0完成后如图1所示:10将上面的渐开线沿RIGHT 平面镜向。
蜗轮参数化设计(creo2.0)
蜗轮参数化设计(c r e o2.0)蜗杆参数化设计工具,参数q 10 蜗杆直径m 2 模数z1 4 蜗杆头数 z2 40 蜗轮齿数 l 40 蜗杆长度x2 0 蜗轮变位系数alpha 20 齿形角gamma 0 蜗杆分度圆导程角ha1 0 蜗杆齿顶高hf1 0 蜗杆齿根高 hf2 0 蜗轮齿根高 s 0 蜗杆导程 tx 0la 0alpha_t 0 蜗杆轴向压力角工具,关系gamma=atan(z1/q)ha1=mhf1=*mhf2=*ms=pi*z1*mtx=ceil(l/s)la=tx*m*z1*pialpha_t=atan(tan(alpha)/cos(gamma))1.建立基准平面DTM1:选TOP 平面往下偏距,编辑关系d0=(m*z2-m*q)/2 2.建立基准轴A1: FRONT 平面与TOP 的相交。
3.建立基准轴A2: RIGHT 平面与DTM1的相交。
4. 建立直角坐标系CS0: x 垂直与top 平面向上,y 垂直与front 平面向外,z 垂直与right 平面向右,系统自动在原默契认坐标处满足所指定的方向生成坐标系CS0 (隐藏原默认参考坐标可以看到)5. 建立直角坐标系CS1: x 垂直与DTM1平面向上,y 垂直与right 平面向右,z 垂直与front 平面向里。
6.建立直角坐标系CS2,参照为CS1,相对Z轴旋转角度负50度(前视图看逆时针方向旋转),隐藏坐标CS1,对刚才任意的角度,添加关系: D3=360/(4*Z2)+180*TAN(ALPHA_T)/PI-ALPHA_T7.建立螺旋线,圆柱坐标系,参考坐标为CS0,方程如下:r=m*q/2theta=-t*tx*360 (这里用负号表示螺旋线为右旋)z=-t*la8. 草绘曲线,草绘平面为front,朝内, Rhght基准面为右参照,,轴A_2为草绘参照。
画四个同心圆,圆心在A2轴线上,从内到外标注,假设尺寸代号为d13,d14,d15,d16, 并建立关系d15=M*Z2d13=D15*COS(ALPHA_T)d14=*Md16=D15+2*M9.建立蜗杆基圆渐开线,笛卡尔坐标系为CS2,方程为:r=m*z2*cos(alpha_t)/2theta=t*60x=r*cos(theta)+r*sin(theta)*theta*pi/180y=r*sin(theta)-r*cos(theta)*theta*pi/180z=0完成后如图1所示:10将上面的渐开线沿RIGHT 平面镜向。
proe全参数化建模教程

proe全参数化建模教程Pro/E(现在称为PTC Creo)是一款广泛使用的三维建模软件,特别适合用于机械设计和工程建模。
在Pro/E中,通过参数化建模可以轻松地创建和管理模型的参数,从而实现模型的自定义和修改。
本教程将介绍如何使用Pro/E进行全参数化建模。
步骤1:启动Pro/E软件并创建一个新的模型文件。
步骤2:在创建模型之前,首先要定义一些参数。
点击菜单栏中的“文件”,然后选择“设置”从下拉列表中选择“参数管理器”。
步骤3:在参数管理器窗口中,点击“添加”按钮创建一个新的参数。
输入参数的名称、单位和初始值,然后点击“确定”。
步骤4:创建完参数后,可以开始绘制模型。
选择适当的草图工具(如直线、圆等)来创建所需的几何形状。
步骤5:在创建几何形状的过程中,可以使用之前定义的参数来确定形状的尺寸和位置。
在输入尺寸的对话框中,选择之前定义的参数作为尺寸的值。
步骤6:完成草图后,可以使用草图工具和特征工具来创建更复杂的几何形状和特征。
同样,可以使用之前定义的参数来控制这些形状和特征的尺寸和位置。
步骤7:在模型创建完成后,可以继续添加特征,如孔、倒角等。
同样,可以使用之前定义的参数来确定这些特征的尺寸和位置。
步骤8:完成模型建模后,可以通过修改参数的值来自定义模型的尺寸。
在参数管理器中找到之前定义的参数,并修改它们的值。
模型将根据参数的更改自动更新。
步骤10:完成自定义和修改后,可以保存模型并导出到其他文件格式中使用。
通过以上步骤,您可以在Pro/E(PTC Creo)中创建全参数化的建模,并轻松地自定义和修改模型。
这种参数化建模的方法可以使您的设计过程更加灵活和高效,让您更好地控制模型的尺寸和形状。
希望这个教程可以对您在Pro/E中进行参数化建模提供帮助。
proe参数化建模介绍

Proe参数化建模介绍本节为大家介绍proe 参数化建模,做一个简单的参数化建模实例。
首先了解一下参数化的定义:参数化设计是proe重点强调的设计理念。
“参数”是参数化设计的核心概念,在一个模型中,参数是通过尺寸的形式来体现的。
参数化设计的突出有点在于可以通过变更参数的方法来方便的修改设计意图,从而修改设计意图。
下面开始教程,阅读说明:图片在上,注释文字在下方。
该教程由本人(幽助)原创,转载请保持其完整性,并注明出处,谢谢!新建一个零件实体。
点击【工具】-【参数】。
如上图,点左下角的“+”号,添加A B C 三个参数,数值自定。
任意拉伸一个长方体。
点击【工具】-【关系】。
如上图添加关系。
点击【编辑】-【再生】。
可以看到长方体的尺寸已经按照参数ABC 的值变化了。
再点击【工具】-【程序】。
选择【编辑设计】。
之后会弹出一个记事本文件。
在记事本里面\INPUT\和\END INPUT\之间输入如上图的内容,保存并退出。
会弹出一个对话框,点击【是】。
再点击【输入】。
勾选A B C 三个参数。
输入长方体的长度尺寸。
输入长方体的宽度尺寸。
输入长方体的高度尺寸。
完成之后长方体长宽高立即按照输入的值变化。
如果在设计过程中尺寸还不合适,还需要修改,只需点击【编辑】-【再生】。
选择【输入】。
勾选其中一个或者多个参数,修改其数值即可。
如果产品各尺寸之间存在等比关系,无需设置多个参数,如上图设置一个参数A.关系里面设定尺寸与参数的倍数关系。
我们修改参数时,只需修改一个,其他俩个会对应变化。
例如,将参数A的值设为50.确定之后我们就可以看到,长方体的长宽高刚好是X1A X0.5A X0.25A 的倍数关系。
至此,教程已完结,欢迎指正!这里只是举一了个很简单的参数化建模实例,只要掌握了这个方法,可以应用在多方面的设计当中去,且修改起来非常方便。
附上我做的3D 图档,proe 5.0 版本,感兴趣的可以下载看看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.5 蜗轮的参数化建模3.5.1 零件分析蜗轮蜗杆机构常用来传递两90。
轴之间的运动和动力。
蜗轮与蜗杆在其中间平面内相当于齿轮与齿条,蜗杆又与螺杆形状相似。
蜗轮蜗杆机可以得到很大的传动比,比交错轴斜齿轮机构紧凑,两轮啮合齿面间为线接触,其承载能力大大高于交错轴斜齿轮机构,蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪音很小、具有自锁性。
当蜗杆的导程角小于啮合轮齿间的当量摩擦角时,机构具有自锁性,可实现反向自锁。
本例将以上面齿轮的参数化设计过程为基础,分析蜗轮的建模过程。
蜗轮外形如图3-158所示,由轮齿、蜗轮主体特征等基本结构特征组成。
轮齿键槽主体图3-158 蜗轮参数化模型蜗轮建模的具体操作步骤如下:(1)添加蜗轮设计参数。
(2)添加蜗轮关系式。
(3)创建基准特征。
(4)创建蜗轮渐开线。
(5)创建扫描混合特征。
(6)创建复制阵列特征。
3.5.2 创建蜗轮(1)新建文件。
单击工具栏(新建)工具,或单击菜单“文件”→“新建”。
名称”栏中输入wolun,选择公制模板mmns-part-solid。
(2)添加蜗轮参数关系。
1)添加过程同斜齿轮。
选择菜单栏“工具/参数”命令,单击(添加)按钮,依次添加蜗轮设计参数,总计11个,添加完毕单击“确定”如图3-159所示。
2)添加过程同斜齿轮,选择餐单栏“工具”→“关系”命令,添加蜗轮的关系式,上步创建的未知参数,可根据本步创建的关系得以运算。
完毕单击“确定”如图3-160所示。
最后在工具栏单击(再生模型)命令。
(3)创建蜗轮基准特征。
1)创建基准平面。
单击工具栏的(基准平面)工具,或选择“插入”→“模型基准”→“平面”创建基平面。
在工作区选择TOP 基准平面,“偏距”输入初始值12.5,单击“确定”,创建基准平面DTM1。
完毕注意添加关系式,选择菜单栏“工具/关系”命令,添加蜗轮的关系式,平移距离等于“=M*Q/2”,如图3-161所示。
图3-160 “关系”对话框 关系式2)创建基准平面DTM2。
创建过程同第一个基准平面,以TOP 基面为参照,用类似的方法将基准平面向DTM1同侧平移距离48.75mm ,创建基准平面DTM2,如图3-162,完毕注意添加关系式,选择菜单栏“工具/关系”命令,平移距离等于“=M*(Q+Z2+2*)/2”,如图3-163所示。
)创建基准轴A1。
单击工具栏的(基准轴)工具,或选择“插入”→“模型基准”→“轴”创建基准轴,如图3-164所示。
在工作区按住Ctrl 键,选择TOP 和RIGHT 作为放置参照,创建经过两个平面交线的基准轴线A1,如图3-165。
4)创建基准轴A2。
单击工具栏的(基准轴)工具,或选择“插入”→“模型基准”图3-162 基准平面创建图3-163 “关系”对话框图3-164 基准轴对话框图3-165 基准轴创建关系式关系式基准轴→“轴”创建基准轴,如图3-166所示,在工作区按住Ctrl 键,选择DTM1和RIGHT 作为放置参照,创建经过两个平面交线的基准轴线A2,如图3-167。
5)创建坐标系CS0。
单击特征工具栏的(坐标系)工具,或选择“插入”→“模型基准”→“坐标系”创建坐标系。
在工作区按住Ctrl 键,选择基准平面RIGHT 、DTM1和FRONT 作为放置参照,单击“定向”选择垂直于DTM1平面向上的方向作为X 轴的正方向,选择垂直于RIGHT 平面向右的方向作为Y 轴的正向,如图3-168所示。
完毕单击“确定”,如图3-169所示。
6)创建坐标系CS1。
单击工具栏的(坐标系)工具,或选择“插入”→“模型基准”→“坐标系”创建坐标系。
在工作区选择或在模型树中选择上步创建的坐标系CS0作为放置参照,在“偏移类型”选项框中选择“笛卡尔坐标”,单击“定向”设置参数如图3-170所示,完毕单击“确定”,完毕后,注意添加关系,选择菜单栏“工具/关系”命令,选择CS0和CS1两坐标系夹角D2,如图3-171所示,关系式为:“=360/(4*Z2)-180*TAN(ALPHA-T)/PI=ALPHA-T ” ,如图3-172所示。
最后在工具栏单击(再生模型)命令。
图3-167 基准轴创建图3-166 基准轴对话框图3-168 坐标系对话框图3-169 坐标系创建基准轴坐标系尺寸参照图3-170 坐标系对话框图3-171 尺寸参照选择关系式图3-172 “关系”对话框(4)创建蜗轮基本圆。
选择“插入/模型基准/草绘”特征工具,或单击工具栏(草绘)命令,选择FRONT 基准平面为草绘平面,系统自动捕捉到与其垂直的RIGHT基准平面为其参考平面。
单击“草绘”确认,进入二维草绘模式。
单击工具栏(圆)命令,选择CS1坐标系,任意草绘4个同心圆,如图3-173所示,草绘完成,单击确认。
注意选择菜单栏“工具/关系”命令,输入如图3-174所示关系。
最后在工具栏单击(再生模型)命令。
关系式(5)创建齿轮渐开线。
1)选择“插入”→“模型基准”→“曲线”工具,或单击工具栏的(基准曲线)命令,选择“从方程”建立渐开线,然后单击“完成”确认,此时系统提示选择曲线方程建立的坐标系,在工作区或模型树中选择CS1坐标系,单击“笛卡尔”坐标系,出现如图3-175所示记事本,在记事本点画线下方,输入渐开线方程,完毕单击记事本“文件/保存”。
最后单击“曲线对话框”“确定”按钮,生成如图3-176所示渐开曲线。
关系式图3-175 记事本对话框图3-176 渐开线创建2)镜像渐开线。
在模型树中或在工作区分别单击左键选中上步创建的渐开线特征,此时特征工具栏的(镜像)命令被激活,或选择“编辑”→“镜像”命令,选择RIGHT 基准平面为镜像平面,单击确认,完成渐开线镜像,如图3-177所示。
(6)创建另一侧渐开线。
选择菜单工具栏“编辑”→“特征操作”,单击其中的“复制”选项,在“复制特征”菜单中选取“移动”“选取”“独立”选项,然后单击“完成”选项。
按住Ctrl 键,选取上一步创建的两条渐开线作为复制对象,单击“完成”选项。
在随后弹出的“移动特征”菜单中选取“平移”选项,在“选取方向”菜单中选取“平面/边/轴线”选项,选取基准轴A2为移动参照。
单击“正向”确认移动方向。
输入平移距离25,再在随后弹出的“移动特征”菜单中选取“旋转”选项,在“选取方向”菜单中选取“平面/边/轴线”选项,选取基准轴A2为移动参照。
单击“正向”确认移动方向。
输入旋转角度4,完毕单击确认,单击“完成移动”。
依次选择“确定”(选取)/“完成”(组)/“确定”,如图3-178所示。
注意添加复制旋转角度关系,选择菜单栏“工具”→“关系”命令,添加旋转角度“=ASIN(M*Q*TAN (BETA )/D5”,如图3-179所示。
图3-177 渐开线镜像特征图3-178 复制特征创建 尺寸参照尺寸参照关系式图3-179 “关系”对话框(7)创建旋转曲面特征1)选择“插入”→“旋转”工具,或单击工具栏(旋转)命令,选择选转方式为曲面类型,旋转角度类型360度。
单击上滑面板“位置”,单击“定义”按钮,在模型树或工作区中选择DTM1基准平面为草绘平面,使用系统缺省参照放置草绘平面后进入二维草绘模式。
2)草绘截面,首先选择菜单栏“草绘”→“直线”或单击“草绘器”工具栏上的(直线)命令,选择(中心线)命令,草绘一条中心线作为旋转轴。
草绘如图3-180所示截面图形,完毕单击确认按钮或鼠标中键,创建如图3-181所示旋转曲面特征。
尺寸参照图3-180 草绘截面尺寸参照图3-181 旋转特征创建3)在模型树中或在工作区单击左键选中上步已创建的旋转曲面特征,单击右键,在弹出的菜单中选择“编辑”选项显示曲面的所有尺寸代号,选择菜单栏“工具”→“关系”命令,添加关系式如图3-182所示。
(8)创建投影曲线。
1)选择菜单“编辑”→“投影”,单击“参照”上滑面板,选取“投影草绘”选项,然后单击“草绘”选择DTM1作为草绘平面,使用系统缺省参照放置草绘平面后进入二维草绘模式。
绘制如图3-183所示的曲线作为投影曲线,单击确认。
2)按照如图3-184所示选取投影曲面,投影参照为基准平面DTM1,方向如图中箭头所示,完毕单击确认按钮或鼠标中键,最后选择“工具”→“关系”命令,将上面创建的角度添加到“关系”对话框中,输入关系式“=BETA ”,如图3-185所示。
图3-183 草绘截面图3-184 投影参照选择关系式夹角投影曲投影方投影曲图3-185 “关系”对话框关系式(9)创建蜗轮主体1)选择“插入”→“旋转”工具或单击工具栏(旋转)命令,选择旋转方式为实体类型,旋转角度类型360度。
单击上滑面板“位置”,单击“定义”按钮,在模型树或工作区中选择TOP 基准平面为草绘平面,使用系统缺省参照放置草绘平面,单击“草绘”进入二维草绘模式。
2)草绘截面,首先选择菜单栏“草绘”→“直线”或单击“草绘器”工具栏上的(直线)命令,选择(中心线)命令,草绘一条中心线作为旋转轴。
草绘如图3-186所示剖面图形,完毕单击确认按钮或鼠标中键,创建如图3-187所示旋转实体特征。
尺寸参照图3-186 草绘截面图3-187 旋转特征3)在模型树中或在工作区单击左键选中上步已创建的旋转实体特征,单击右键,在弹出的菜单中选择“编辑”选项显示实体的所有尺寸代号,选择“工具”→“关系”命令,添加关系式如图3-188所示。
关系式图3-188 “关系”对话框(10)创建倒角特征。
.在工具栏单击倒角命令,选择倒角样式为“45×D ”设置D 值为2.5。
选取倒角参照如图3-189所示边,最后选择“工具”→“关系”命令,添加倒角关系式“=M ”如图3-190所示。
(11)创建扫描混合特征。
选择“插入”→“扫描混合”。
单击控制面板上的“参照”,选择上面创建的投影轨迹曲线作为原始扫描轨迹,参照控制面板被激活,接受截面控制默认方式。
单击“剖面”按钮。
方式选择为“草绘截面”。
首先单击“插入”,选择第一个参考点,然后单击“草绘”,进入二维草绘模式,绘制如图3-191所示齿廓曲线。
完毕单击确认,然后再次单击“插入”,选择第二个参考点,最后单击“草绘”,进入二维草绘模式,绘制如图3-192所示齿廓曲线,单击确认,扫描混合方式选择“除材料”。
完毕单击确认按钮或鼠标中键,创建如图3-193所示扫描混合切口特征。
注意将草绘的剖面中的倒圆角半径参数添加到“关系”对话框关系式为“=0.38*D ”,如图 3-189 倒角特征图3-190 “关系”对话框尺寸参照关系式图 3-191 草绘截面图 3-192 草绘截面图3-194所示。
(12)创建复制特征。
选择菜单栏“编辑”→“特征操作”,单击其中的“复制”选项,在“复制特征”菜单中依次选取“移动”“选取”“独立”选项,然后单击“完成”选项。