第三章_机器人运动学
第三章机器人运动学

第三章机器人运动学机器人运动学是研究机器人如何在二维或三维空间中进行运动的学科。
它涉及到机器人的轨迹规划、运动控制和路径规划等重要内容。
本章将介绍机器人运动学的基本概念和常用模型,帮助读者全面了解机器人的运动规律和控制原理。
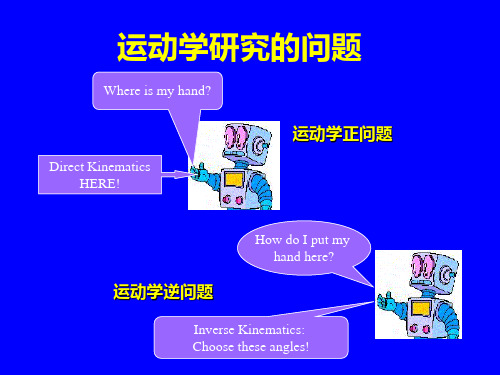
1. 机器人运动学的基本概念机器人运动学是研究机器人位置和姿态变化的学科,包括正运动学和逆运动学两个方面。
正运动学研究机器人的末端执行器的位置和姿态如何由关节变量确定;逆运动学则研究机器人如何通过末端执行器的位置和姿态来确定关节变量的值。
机器人的运动学建模一般采用DH(Denavit-Hartenberg)参数表示方法。
DH 参数是由Denavit和Hartenberg提出的一种机器人坐标系的选择和旋转轴的确定方法。
通过定义一系列关节坐标系,建立起机器人的坐标系链,并确定各个关节的旋转轴和约定的方向,可以方便地描述机器人的运动学特性。
2. 机器人正运动学机器人正运动学是研究机器人末端执行器位置和姿态如何由关节变量确定的问题。
在机器人的正运动学中,常用的方法有几何法和代数法。
2.1 几何法几何法是一种较为直观的方法,通过对机器人各个关节坐标系的位置和旋转进行推导,得到机器人末端执行器的位置和姿态。
几何法适用于无约束和无外力干扰的情况,可以简单快速地推导出机器人的正运动学方程。
2.2 代数法代数法是一种基于运动学链的代数运算的方法,通过DH参数建立起机器人的坐标系链,并通过矩阵运算推导出机器人的正运动学方程。
代数法在机器人正运动学的推导和计算过程中更具有普适性和灵活性。
3. 机器人逆运动学机器人逆运动学是研究机器人如何通过末端执行器的位置和姿态来确定关节变量的值的问题。
机器人逆运动学在机器人运动规划和路径控制中起到重要的作用。
机器人逆运动学的求解一般采用迭代方法,通过迭代计算来逼近解析解,实现对机器人关节变量的求解。
逆运动学的求解过程中可能会出现奇异点和多解的情况,需要通过约束条件和优化方法来处理。
第3章 机器人运动

3 齐次坐标变换 3.1齐次坐标变换 3.1齐次坐标变换 假设机器人手部拿一个钻头在 工件上实施钻孔作业,已知钻 头中心P点相对于手腕中心的 位置,求P点相对于基座的位 置。
x i o
zb kb yb jb o, ib xb P
z
k
j
y
分别在基座和手部设置为固定坐标系和动坐标系, 如图所示。
P点 相对于固定坐标系
1 4 0 −3 0 7 0 1
T中第一列的三个元素(0,1,0)T表示活动坐标系的u轴与 固定坐标系三个坐标轴之间的投影,故u轴平行于y轴;T中第 二列的三个元素(0,0,1)T表示活动坐标系的v轴与固定坐 标系三个坐标轴之间的投影,故v轴平行于z轴;T中第三列的 三个元素(1,0,0)T表示活动坐标系的w轴与固定坐标系三 个坐标轴之间的投影,故轴w平行于x轴;T中第四列的三个元 素(4,-3,7)T表示活动坐标系的原点与固定坐标系原点之 间的距离。
b
3.3.2 举例 ⋅ i i
z kb k o, xb i o xi y j y j
1 0 0 R = 0 1 0 0 0 1
所以
x0 X 0 = y0 z0
0 0 1 0 0 1 0 0
1 0 A = Trans( x0 , y0 , z0 ) = 0 0
上面所述的坐标变换每步都是相对于固定坐标系进行的,也可以 相对于动坐标系进行变换: 坐标系 {o , : u , v, w} 初始与固定坐标系 {o:x, y, z} 相重合,首先相对于固定坐标系平移
4i − 3 j + 7 k ;然后绕活动系的v轴旋转900;最后绕w轴旋转900。
变换的几何表示如图所示。这是合成变换矩阵为
机器人学第3章 机器人运动学

(3.46)
如果已知一个表示任意旋转的齐次变换,那么就能够 确定其等价欧拉角。
3.2 机械手运动方程的求解
21
3.2.2 滚、仰、偏变换解
直接从显式方程来求解用滚动、俯仰和偏转表示的变 换方程。 RPY变换各角如下:
atan2(n y , n x ) 180 atan2(n z , cn x sn y ) atan2( sa x ca y , so x co y )
0
T6 0T1 (1 )1T2 (2 )2T3 (3 )3T4 (4 )4T5 (5 )5T6 (6 )
3.1 机器人运动方向的表示
5
3.1.1 运动姿态和方向角
用横滚、俯仰和偏转角表示运动姿态 另一种常用的旋转集合是横滚(roll)、俯仰(pitch) 和偏转(yaw)。
图3.3 用横滚、俯仰和偏转表示机械手运动姿态
3.1 机器人运动方向的表示 6
3.1.1 运动姿态和方向角
对于旋转次序,规定:
1
(3.16)
3.1 机器人运动方向的表示
15
3.1.3 连杆变换矩阵及其乘积
如果机械手与参考坐标系的相对关系是由变换 Z 来 表示的,而且机械手与其端部工具的关系由变换 E 表示,那么此工具端部对参考坐标系的位置和方向 可由变换 X 表示如下:
可求得:
X ZT6 E
T6 Z 1 XE 1
(3.52)
3.2 机械手运动方程的求解
22
3.2.3 球面变换解
把求解滚、仰和偏变换方程的技术用于球面坐标表示 的运动方程。 球面变换的解为:
atan2( p y , p x ), 180 atan2(cp x sp y , p z )
机器人技术基础课件第三章-机器人运动学精选全文完整版
如此类推,对于六连杆机器人,有下列矩阵:
06T 01T 12T 23T 34T 45T 56T
3.2 3.2 机械手运动学方程
26
0 6
T
3.1.4 连杆变换矩阵及其乘积
06T 01T12T 23T 34T 45T 56T
机器人运动学方程
此式右边表示了从固定参考系到手部坐标系的各连杆
一个六连杆机械手可具有六个自由度,每个连杆含 有一个自由度,并能在其运动范围内任意定位与定向。 其中三个自由度用于规定位置,而另外三个自由度用 来规定姿态。
8
3.1.1 连杆坐标系
机械手的运动方向
机器人手部的位置和姿态也可以
用固连于手部的坐标系{B}的位姿
来表示
关节轴为ZB, ZB轴的单位方向 矢量α称为接近矢量,指向朝外。
(1) 坐标系{i-1}绕xi-1轴转角αi-1,使Zi-1与Zi平行,算子为Rot(x, αi-1) ; (2) 沿Xi-1轴平移ai-1,使Zi-1和Zi共线, 算子为Trans(ai-1,0,0); (3)绕Zi轴转角θi; 使得使Xi-1与Xi平行, 算子为Rot(z,θi);
(4) 沿Zi轴平移di。使得i-1系和i系重合, 算子为Trans(0,0,di)。
3.2.1 机器人正运动学方程
连杆 i 1
2
3
连杆长 度ai-1
0
a0
a1
连杆偏距 di 0
0
d2
连杆扭角 αi-1 00
00
-900
关节角 θi
θ1(00) θ2(00) θ3(00)
3.2.1 机器人正运动学方程
该3自由度机器人的运动学方程为:
第3章工业机器人运动学和动力学概要
第3章工业机器人运动学和动力学机器人操作臂可看成一个开式运动链,它是由一系列连杆通过转动或移动关节串联而成。
开链的一端固定在基座上,另一端是自由的,安装着工具,用以操作物体,完成各种作业。
关节由驱动器驱动,关节的相对运动导致连杆的运动,使手爪到达所需的位姿。
在轨迹规划时,最感兴趣的是末端执行器相对于固定参考系的空间描述。
为了研究机器人各连杆之间的位移关系,可在每个连杆上固接一个坐标系,然后描述这些坐标系之间的关系。
Denavit和Hartenberg提出一种通用方法,用一个4*4的齐次变换矩阵描述相邻两连杆的空间关系,从而推导出“手爪坐标系”相对于“参考系”的等价齐次变换矩阵,建立出操作臂的运动方程。
称之为D-H矩阵法。
3.1 工业机器人的运动学教学时数:4学时教学目标:理解工业机器人的位姿描述和齐次变换;掌握齐次坐标和齐次变换矩阵的运算;理解连杆参数、连杆变换和运动学方程的求解;教学重点:掌握齐次变换及运动学方程的求解教学难点:齐次变换及运算教学方法:讲授教学步骤:齐次变换有较直观的几何意义,而且可描述各杆件之间的关系,所以常用于解决运动学问题。
已知关节运动学参数,求出末端执行器运动学参数是工业机器人正向运动学问题的求解;反之,是工业机器人逆向运动学问题的求解。
3.1.1 工业机器人位姿描述1.点的位置描述在选定的指教坐标系{A}中,空间任一点P的位置可用3*1的位置矢量表示,其左上标代表选定的参考坐标系。
2.点的齐次坐标如果用四个数组成4*1列阵表示三维空间直角坐标系{A}中点P,则该列阵称为三维空间点P的齐次坐标,如下:必须注意,齐次坐标的表示不是惟一的。
我们将其各元素同乘一个非零因子后,仍然代表同一点P,即其中:,,。
该列阵也表示P点,齐次坐标的表示不是惟一的。
3.坐标轴方向的描述用i、j、k分别表示直角坐标系中X、Y、Z坐标轴的单位向量,用齐次坐标来描述X、Y、Z轴的方向,则有,,从上可知,我们规定:4*1列阵中第四个元素为零,且,则表示某轴(某矢量)的方向。
第03章 机器人的运动学和动力学

教案首页课程名称农业机器人任课教师李玉柱第3章机器人运动学和动力学计划学时 3教学目的和要求:1.概述,齐次坐标与动系位姿矩阵,了解平移和旋转的齐次变换;2.机器人的运动学方程的建立与求解*;3.机器人的动力学*重点:1.机器人操作机运动学方程的建立及求解;2.工业机器人运动学方程3.机器人动力学难点:1. 机器人动力学方程及雅可比矩阵基本原理思考题:1.简述齐次坐标与动系位姿矩阵基本原理。
2.连杆参数及连杆坐标系如何建立?3.机器人动力学方程及雅可比矩阵基本原理是什么?第3章机器人运动学和动力学教学主要内容:3.2 齐次坐标与动系位姿矩阵3.3 齐次变换3.4 机器操作机运动学方程的建立与求解3.5 机器人运动学方程3.6 机器人动力学本章将主要讨论机器人运动学和动力学基本问题。
先后引入了齐次坐标与动系位姿矩阵、齐次变换,通过对机器人的位姿分析,介绍了机器人运动学方程;在此基础上有对机器人运动学方程进行了较为深入的探讨。
3.1 概述机器人,尤其是关节型机器人最有代表性。
关节型机器人实质上是由一系列关节连接而成的空间连杆开式链机构,要研究关节型机器人,必须对运动学和动力学知识有一个基本的了解。
分析机器人连杆的位置和姿态与关节角之间的关系,理论称为运动学,而研究机器人运动和受力之间的关系的理论则是动力学。
3.2 齐次坐标与动系位姿矩阵3.2.1 点的位置描述在关节型机器人的位姿控制中,首先要精确描述各连杆的位置。
为此,先定义一个固定的坐标系,其原点为机器人处于初始状态的正下方地面上的那个点,如图3-1(a)所示。
记该坐标系为世界坐标系。
在选定的直角坐标系{A}中,空间任一点P的位置可以用3×1的位置向量A P表示,其左上标表示选定的坐标系{A},此时有A P=XYZ P P P ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦式中:P X、P Y、P Z—点P在坐标系{A}中的三个位置坐标分量,如图3-1(b)。
3.2.2 齐次坐标将一个n维空间的点用n+1维坐标表示,则该n+1维坐标即为n维坐标的齐次坐标....。
第三章_移动机器人运动学
3.3.2可操纵度 s
对于可操纵的标准轮,通过改变操纵角,可 间接改变机器人的姿态。
• 3.3.2 活动性的程度
活动性表示机器人在环境中直接运动的能力。 限制活动性的基本约束就是加在轮子上的滑动约 束。 滑动约束如前所示为:
在数学上, C 1 ( s ) 的零空间是空间N,使得 对任何N中的向量n, C 1 ( s ) n 0 。为了满足约 束,运动向量 R ( ) I 必须属于投影矩阵 C 1 ( s ) 的零空间。若遵守运动学约束,则机器人的运 动必定总是在该空间N内。 在几何上,利用机 器人的瞬时转动中心,可以同时说明运动学的 约束。
小结:对于小脚轮、瑞典轮和球形轮,由于其内 部的自由度,并未对机器人的运动施加实质上的 约束,即机器人可在全局参考框架下自由运动。 也就是说,只有固定标准轮和可操纵标准轮会对 机器人的运动施加约束。
3.2.4 机器人运动学约束
给定一个具有M个轮子的机器人, 假定机器 人总共有N个标准轮,由Nf个固定标准轮和Ns个 可操纵标准轮组成。βs(t)表示可操纵标准轮的可 变操纵角。βf表示固定标准轮的方向。
将上式求逆,得到特定的差动驱动机器人的运动学方程:
1 0 l 1 0 l 0 1 0
1 J2 1 R ( ) 0
I R ( )
1
1 2 0 1 2l
1 2 0 1 2l
0 J 1 2 0 0
• 瞬时转动中心 ICR (instantaneous center of rotation)
在任何给定时刻,轮子必定沿着半径为R的 某个圆瞬时的运动,使得那个圆的中心处在零运 动直线上,该中心称为瞬时转动中心。它可以位 于沿零运动直线的任何地方。
第三章机器人运动学

XX,a click to unlimited possibilities
汇报人:XX
目录
01 机 器 人 运 动 学 基 础 03 机 器 人 运 动 学 求 解
方法
05 机 器 人 运 动 学 的 发
展趋势和挑战
02 机 器 人 关 节 类 型 和 运动学模型
04 机 器 人 运 动 学 在 实 践中的应用
迭代求解算法
迭代求解算法的基本思想是通过不断迭代逼近解的过程 常见的迭代求解算法包括雅可比迭代法、高斯-赛德尔迭代法等 迭代求解算法的收敛性和收敛速度是评价算法优劣的重要指标 迭代求解算法在机器人运动学中具有广泛的应用,可以提高机器人的运动精度和稳定性
Part Four
机器人运动学在实 践中的应用
添加标题
添加标题
添加标题
添加标题
变换矩阵:描述机器人末端执行器 相对于参考坐标系的位姿变化,由 平移和旋转矩阵组合而成。
齐次坐标和变换矩阵的应用场景: 机器人轨迹规划、姿态控制、碰撞 检测等。
运动学方程
定义:描述机器 人关节运动的数 学模型
建立方法:根据 机器人结构和运 动需求进行建模
求解过程:通过 数值计算得到机 器人末端执行器 的位置和姿态
添加标题
添加标题
添加标题
添加标题
变换矩阵:描述机器人末端执行器 在各个坐标系之间位置和姿态关系 的数学工具
逆运动学:已知目标位置和姿态, 求解机器人关节角度的过程
齐次坐标和变换矩阵
齐次坐标:描述机器人末端执行器 的位置和姿态,通过将实际坐标系 与参考坐标系进行转换得到。
齐次坐标和变换矩阵在机器人运动 学中的重要性:实现机器人末端执 行器的精确控制和定位。
机器人学基础_第3章机器人运动学
移动连杆坐标系的建立
移动连杆坐标系的规定:
• 坐标轴Zi:与i+1关节的轴线重合; • 坐标轴Xi:沿移动关节i轴线与关节i+1轴线的公垂线,指向i+1关节; • 坐标轴Yi:按右手直角坐标系法则确定; • 坐标原点Oi: (1)当关节i轴线和关节i+1轴线相交时,取交点; (2)当关节i轴线和关节i+1轴线异面时,取两轴线的公垂线与关节i轴
动到使其原点与连杆i坐标系原点重合的地方。 • (4) 绕Xi旋转αi角,使Zi–1转到与Zi同一直线上。 • 连杆i–1的坐标系经过上述变换与连杆i的坐标系
重合。如果把表示相邻连杆相对空间关系的矩阵 称为A矩阵,那么根据上述变换步骤,从连杆i到 连杆i–1的坐标变换矩阵Ai为
•
(3.13)
• 同理,对联轴器的齐次坐标变换矩阵有 •
• 手部的位置矢量为固定参考系原点指向手 部坐标系{B}原点的矢量P,手部的方向矢 量为n、o、a。于是手部的位姿可用4 4 矩阵表示为
•
•
nX oX a X PX
T
nY
oY
aY
PY
nZ 0
oz 0
aZ 0
PZ 1
• 思考:
• ①说明位姿矩阵的左上角3×3矩阵的几何 意义。
• ②分别说明n, o, a, P的几何意义。
a1 = l 1 =100
a2 = l 2 =100
旧课复习与总结
转动连杆坐标系的建立
• 坐标轴Zi:与i+1关节的轴线重合; • 坐标轴Xi:沿连杆i两关节轴线的公垂线,指向i+1关节; • 坐标轴Yi:按右手直角坐标系法则确定; • 坐标原点Oi: (1)当关节i轴线和关节i+1轴线相交时,取交点; (2)当关节i轴线和关节i+1轴线异面时,取两轴线的公垂
机器人学-第3章_机器人运动学

1, di)表示。
空间机械臂坐标系选择
为了获得机械臂末端执行器在3维空间的位置和姿态,需要在每个连杆上 定义与连杆固连的坐标系来描述相邻连杆之间的位置关系。
根据固连坐标系所在连杆的编号对固连坐标系命名,如在固连在连杆i上 的固连坐标系称为坐标系{i}。
若ai =0,两Z轴相交,则选Xi垂于Zi和Zi+1 ,坐标系{i}的选择不是唯一的。
9
轴i θi
轴 i-1
连杆坐标系中连杆参数确定
θi-1
连杆 i-1
DH参数按以下方法确定:
Zi
ai =沿Xi轴,从Zi移动到Zi+1的距离;
Yi
i =绕Xi轴,从Zi旋转到Zi+1的角度;
di =沿Zi轴,从Xi-1移动到Xi的距离;
系{1}与坐标系{0}重合。
对于坐标系{n},原点位置可以在关节轴
上任意选取, Xn的方向也是任意的。但在选 择时应尽量使更多的连杆参数为1=0 1=-90o d1=0
Y2
a2=L2 2=0 q2=-90o d2=L1
(b)
Z1
X2
Y2
Y1
X1
a1=0 1=90o d1=0
相邻连杆间坐标变换公式
建立 {P}、{Q}和{R}3个中间坐标系, 其中{i}和{i-1}是固定在连杆 i 和 i-1 上的固 连坐标系,如图3-13所示。
连杆 i-1 Zi
ZP
Xi ai
di ZQ XQ
ZR
qi
Zi-1
Xi-1XR ai-1
XP
i-1
1. 绕 Xi-1 轴旋转 i-1角
课件:第三章机器人运动学
• 3.1 机器人运动方程的表示
• 3.1.2 运动位置和坐标
• 一旦机械手的运动姿态由某个姿态变换规定之后,它在基坐标系中的 位置就能够由左乘一个对应于矢量p的平移变换来确定。
1 0 0 px
T6
0 0
1 0
0 1
p
y
某姿态变换
pz
0 0
0
1
Robotics运动学
3.1 机器人运动方程的表示
3.1.3 连杆变换矩阵 1.广义连杆(D-H坐标)
所有关节全为转动关节时: Zi坐标轴; Xi坐标轴; Yi坐标轴;
连杆长度ai;连杆两端关节公共法线距离 连杆扭角αi;垂直于ai所在平面内两轴的夹角 两连杆距离di;两连杆的相对位置di 两杆夹角θ 两连杆法线的夹角
Robotics运动学
3.1 机器人运动方程的表示
s c 0 0ny
oy
ay
p
y
s
c
0 0
0
0
0 0
1 0
0 1
nz 1
oz 1
az 1
pz 1
sc
0
ss
0
c 0
0 1
(3-39)
Robotics运动学
3.2 机械手运动方程的求解
3.2.1欧拉变换解
重写为
f11(n) f11(o) f11(a) f11( p) cc cs s 0
保持姿态,执行器要绕其自身Y和Z轴反向旋转.
Sph( , , r) Rot(z, )Rot( y, )Trans(0,0, r)Rot( yA, )Rot(zA, )
1 0 0 rcs
0
1
0
rss
工业机器人课件第三章 机器人运动学
T3= A1 A2 A3
称这些A矩阵的乘积为T矩阵,其前置上标若为0,则可省略。对于六 连杆机械手,有下列T矩阵
T6= A1 A2 A3 A4 A5 A6
手爪坐标系
机械手的运动方向 原点由矢量p表示。 接近矢量a:z轴设在手指接近物体的方向,称为接近矢量 方向矢量o:y轴设在两手指的连线方向,称为方位矢量 法线矢量n:x轴由右手系确定, 即 n = o a ,称为法向矢量。
0 sin i cos i 0
0 0 0 1
对于在第i坐标系中的点ri在第i—1坐标系中表示为:
ri 1 i 1Ai ri
确定第i坐标系相对于机座坐标系的位置的齐次变换矩阵i-1Ti是 各齐次变换矩阵Ai的连乘积,可表示成
0
Ti A1 A2 A3 A4 A5 A6 A j
பைடு நூலகம்
cos i sin cos i i 1 sin i sin i 1 0
例 建立右图所示机器人相邻坐标 系间的转换矩阵 解:建立的坐标系如右图,这是二维坐 标系(在三维空间中,各坐标系的z轴垂 直于纸面),其相邻坐标系的变换矩阵 为
A1 Rz ,Tx ,l1
第三章 机器人运动学
§ 3.1 机器人运动方程的表示
机器人的机械手看作是一系列由关节连接起来的连杆构成的。为机 械手的每一连杆建立一个坐标系,并用齐次变换来描述这些坐标系间 的相对位置和姿态。通常把描述一个连杆与下一个连杆间相对关系的 齐次变换叫做A矩阵。一个A矩阵就是一个描述连杆坐标系间相对平移 和旋转的齐次变换。如果A1表示第一个连杆对于基系的位置和姿态, A2表示第二个连杆相对于第一个连杆的位置和姿态,则第二个连杆在 基系中的位置和姿态可由下列矩阵的乘积给出 T2= A1 A2 同理,若A3表示第三个连杆相对于第二个连杆的位置和姿态,则有
第三章 机器人运动学

cos 3 sin 3 A3 0 0
sin 3 0 0 cos 3 0 0 0 1 0 0 0 1
0 l2 cos 2 0 l2 sin 2 1 0 0 1
SCARA机器人
( Selective Compliance Assembly Robot Arm )
第3 章 机器人运动学
3.1
3
概述
将关节坐标固连于机器人的每 一个连杆上。
6
2 4 5 1 以齐次坐标变换来描述坐标间的 相对位置和方向。 ——等同于描述了连杆间的位姿关 系!
3 6 2 4 5 1
齐次变换矩阵 A1 描述第1连杆 相对于参考坐标系{O}的位姿
0
p A1 1 p
A
0 1
0 l2 cos 2 0 l2 sin 2 1 0 0 1
1 0 A3 0 0
0 1 0 0
0 0 0 0 1 d3 0 1
cos 4 sin 4 A4 0 0
sin 4 cos 4 0 0
坐标系{i}固连于连杆i 坐标系{i}固连于关节i+1 z 轴与关节轴重合,方向 自由确定。
x 轴是连杆长度的延长线,
方向由关节i指向关节i+1。
坐标系{i}由坐标系{i-1}通过4次齐次变换而得到的。
4次齐次变换都 是相对于当前 坐标系进行的!
Ai1 Rot zi 1,i Ai3 Trans ai ,0,0
齐次变换矩阵 A2 描述第1连杆 相对于第2连杆的位姿
1
p A2 2 p
0
p A1 A2 2 p
T2 A1 A2
第三章机器人运动学PPT课件
由这些矢量描述的空间称为关节空间。
• 正向运动学:关节空间末端笛卡儿空间,单射 • 逆向运动学:末端笛卡儿空间关节空间,复射
不同的关节空间,相同的 末端笛卡儿空间
关节空间与末端笛卡儿空 间映射关系
第三章 机器人的运动学
3.1 工业机器人运动学
,它的齐
次坐标就是
,即满足Px=ωPx/ω,Py=ωPy/ω,
Pz=ωPz/ω(ω是非零整数)。可以看出,在三维直角坐标系中,
由于ω取值的不同,一个点的齐次坐标的表达不唯一。
齐次坐标不仅可以规定点的位置(ω为非零整数),还可以
用来规定矢量的方向(第四个元素为零时)。列向量
(
)表示空间的无穷远点,a,b和c称为它的方向
单位主矢量相对于坐标系{A}的方向余弦组成:
xB
yB
zB
xA
yA
zA
其中:co scoxB s ,xA ()
既表示了刚体F在{A}系中的方位,也描述了{B}系在{A}系中的 姿态。
3.1.2.2 坐标变换
一、坐标平移
如图3-5,坐标系{B}与{A} 方向相同,但原点不重合。
图3-5 坐标平移
此式称为平移方程。其中 是B系中的原点在A系中的表示。
0
0
0
1
1
1
给定坐标系{A},{B}和{C},已知{B}相对{A}的描述为 ,
{C}相对{B}的描述为
AP A BTBP BPC BTCP APC ATCP
,则有
APA BTC BTCP
CATABTCBT
从而定义复合变换
。
同理得出:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
z , Rij
pij
yi
oj xj
yj
cos si n M ij 0 0
si n cos 0 0
0 0 1 0
p x xi py pz 1
齐次坐标变换
齐次变换矩阵(D-H矩阵) 由此可得联合变换的齐次坐标方程为:
ri rj M ij 1 1
M AB Trans(3,5,9) Rot( x A ,90 ) Rot( z A ,90 )
1 0 0 0 3 1 0 0 cos90 1 0 5 0 1 9 0 sin90 0 0 1 0 0 0 0 0 sin90 cos90 0 0 cos90 0 sin 90 0 0 1 0 sin90 cos90 0 0 0 0 0 0 1 0 0 1
机器人的位姿
机器人位姿的表示
例:右图所示两坐标系的
姿态为:
z0 x1 o0 x0 y0
z1 o1 y1
0 1 0 R01 1 0 0 0 0 1
机器人的位姿
机器人的坐标系 手部坐标系(手爪坐标系)——机器人手部的坐标系, 也称机器人位姿坐标系,它表示机器人手部在指定坐 标系中的位置和姿态。 杆件坐标系(参考坐标系)——机器人指定杆件的坐 标系,它是在机器人每个活动杆件上固定的坐标系, 随杆件的运动而运动。 机座坐标系(基准坐标系)——机器人机座的坐标系, 它是机器人各活动杆件及手部的公共参考坐标系。
机器人的位姿
机器人的坐标系 手部坐标系{h} 机座坐标系{0} 杆件坐标系{i} i=1,…,n
第3章 机器人运动学
三、齐次变换及运算
齐次变换及运算
直角坐标变换
坐标之间的变换关系
平移变换
zj zi oi
旋转变换
xi
xj
oj
yj
yi
直角坐标变换
齐次变换及运算
平移变换 设i坐标系和j坐标系具有相同的姿态,但它俩 的坐标原点不重合,若空间有一点在i坐标系和j 表示,则它们之 坐标系中分别用矢量 和 r ri j 间有以下关系: zj
式中,M ij ——齐次坐标变换矩阵, 它是一个4×4的矩阵。
齐次坐标变换
齐次坐标变换矩阵的意义 若将齐次坐标变换矩阵分块,则有:
cos sin M ij 0 0
sin cos 0 0
0 0 1 0
px z , p y Rij pz 0 1
pij 1
意义:左上角的3×3矩阵是两个坐标系之间的旋转变 换矩阵,它描述了姿态关系;右上角的3×1矩阵是 两个坐标系之间的平移变换矩阵,它描述了位置关 系,所以齐次坐标变换矩阵又称为位姿矩阵。
齐次坐标变换
单独平移变换的齐次矩阵为:
px 已知:pij p y p z
(3-6)
同样,如果用向量表示上述关系式,其一般可表示为
f (r )
1
(3-7)
如图所示,机器人到达给定的手爪位置
r
有两个姿态满足要求,即图中的 也是其解。 这时1 和 2 变成为另外的值。即逆运动学的解不是惟一 的,可以有多个解。
第3章 机器人运动学
二、机器人的位置和姿态
ri pij rj
称上式为坐标平移方程。
xi
zi oi
ri r j
pij
xj
yi
oj
yj
直角坐标变换
齐次变换及运算
旋转变换 设i坐标系和j坐标系的原点重合,但它俩的姿态不 同,则j坐标系就可以看成是由i坐标系旋转变换而来的。
zi
zj
yj oi xi oj
yi
xj
直角坐标变换
运动学基本问题
数学模型:
手的运动→位姿变化→位姿矩阵r
关节运动→参数变化→关节变量θ, 运动学方程: r=f(θ) 正问题:已知θ,求r。 逆问题:已知r,求θ 。
运动学基本问题
运动学基本问题--正问题 以2自由度为例
图3-1所示为2自由度机器人手部的连杆机构。
我们引入向量分别表示手爪 位置和关节变量,
如图为逆运动学问题(知位置,求分量),可得
2
(3-4)
L2 sin 2 y 1 arctan( ) arctan( ) x L1 L2 cos 2
式中
(3-5)
2 ( x 2 y 2 ) L1 L2 2 arccos 2 L1 L2
旋转变换
齐次变换及运算
——旋转变换矩阵,是一个3×3的矩阵,其中的每个 元素就是i坐标系和j坐标系相应坐标轴夹角θ的余弦值,它 表明了姿态(方向)。θ角的正负按右手法则确定,即由轴 的矢端看,逆时钟为正。
直角坐标变换
齐次变换及运算
联合变换 设i坐标系j和坐标系之间存在先平移变换, 后旋转变换,则空间任一点在i坐标系和j坐 标系中的矢量之间就有以下关系:
{n}
M0n M01 M12 Mi 1i Mn1n
由此可知,建立机器人的坐标系, 可以通过齐次坐标变换,将机器人 手部在空间的位置和姿态用齐次坐 标变换矩阵描述出来,从而建立机 器人的运动学方程。
{i}
{i-1}
{0}
齐次坐标变换
例:已知B坐标系是绕A坐标系的z轴旋转90°,再绕x轴旋转 90°,最后沿矢量 pA 3i 5 j 9k 平移得到的,求A坐标系 与B坐标系之间的齐次坐标变换矩阵。 解:由于变换始终是相对于原来的参考坐标系,即有:
1 0 则:M p Trans( p x , p y , pz ) 0 0 0 1 0 0 0 0 1 0 px py E pz 0 1 pij 1
齐次坐标变换
单独旋转变换的齐次矩阵为:
cos sin 0 sin cos 0
sin cos 0 0 0 0 1 0
z , 已知:Rij
0 0 1
0 z, θ 0 R ij 0 0 1
则:M zR
cos sin Rot( z , ) 0 0
0 1
齐次坐标变换
当空间有任意多个坐标系时,若已 知相邻坐标系之间的齐次坐标变换 矩阵,则由坐标变换原理可知:
cos 30 12 , p AB 6 RAB sin30 0 0 则:
sin30 cos 30 0
0 0.866 0.5 0 0 0.5 0.866 0 1 0 1 0
12 0.866 0.5 0 5 11.830 9 13.794 rA p AB RAB rB 6 0.5 0.866 0 0 1 0 0 0 0
用向量表示这个关系式,其一般可表示为
r f ( )
式中 f 表示向量函数。
(3-3)
已知机器人的关节变量 ,求其手爪位置的 运动学问题称为正运动学(direct kinematics)。
该公式被称为运动方程式。
运动学基本问题--逆问题 如果,给定机器人的手爪位置,求 为了到达这个预定的位置,机器人的关 节变量的运动学问题称为逆运动学 (inverse kinematics)。 其运动方程式以2自由度机械手为 例,通过以下分析说明。
机器人的位置和姿态
机器人位姿的表示 机器人的位姿主要是指机 器人手部在空间的位置和姿态 ,有时也会用到其它各个活动 杆件在空间的位置和姿态。
机器人的位姿
机器人位姿的表示
位置可以用一个3×1的位置矩阵来描述。
z
px x p py y p z z
x r y
1 2
因此,利用上述两个向量来 描述一下这个2自由度机器 人的运动学问题。 手爪位置的各分量, x L1 cos1 L2 cos(1 2 ) 按几何学可表示为:
y L1 sin 1 L2 sin(1 2 )
3 0 1 0 0 0 1 5 1 0 0 9 0 1 0 0
第3章 机器人运动学
四、机器人运动学方程
机器人运动学方程
例:已知B坐标系的初始位置与A坐 标系重合,首先把B坐标系沿A坐标 系的x轴移动12个单位,并沿y轴移 动6个单位,再绕z轴旋转30°,求 平移变换矩阵和旋转变换矩阵。假 设某点在B坐标系中的矢量 r 5i 9 j 0k 求该点在A坐标系中的矢量。
B
例:已知B坐标系的初始位置与A坐标系重合,首先把B坐标 系沿A坐标系的x轴移动12个单位,并沿y轴移动6个单位,再 绕z轴旋转30°,求平移变换矩阵和旋转变换矩阵。假设某点 rB 5i 9 j 0k 在B坐标系中的矢量 ,求该点在A坐标系中的矢 量。 解:由题意可得平移变换矩阵和旋转变换矩阵分别为:
ri pij Rij rj
称上式为直角坐标系中的坐标联合变换方程。
例
若j坐标系是i坐标系先沿矢量 pij pxi py j pz k 平移,再绕z轴旋转θ角得到的,则空间任一点在i 坐标系和j坐标系中的矢量和对应的变换矩阵之间 z , 就有 r ,写成矩阵形式则为: p R i ij ij rj
x i cos y si n i zi 0 1 0
si n cos 0 0
0 0 1 0
px x j py y j pz z j 1 1
齐次坐标变换
i坐标系通过先平移,后绕z旋转 变成j坐标系,则变换矩阵为: zi