基于比例切换函数的滑模控制matlab仿真实例
ASR的滑模变结构控制方法及仿真研究

控制函数就可表示为 :
m( s ) =e ’ +f P, c > O
一 | 、 f . F p 1
|
r
.
式中 , c 为待 定常数 , 反映 了系统状 态对控制 切换 函数 r e( s ) 影响 的 大 小。滑模 变结构控 制系统 的设 计成为 : 根 据控制 目标 选择适 当的切 换 函数 r e ( s ) 和控制变量 u 和U 一 , 使得满 足条件式 m m’ <O, 这样 才能保 证 在相 同平 面内的任一 初始点都 能抵达切换 线 , 并 能沿 着切换 线滑 向 控制 目标 。 比例切换控 制 :
+C S< 0
由s =1 一旦 , 并对其求一二 阶导数 , 并带 入式 中 ,
得: ’ =
( c J F
”
对驱动车轮纵 向力平衡可得 :
ml =Fn—Fp ( 2 )
=
{( 2 ” 一 3 “ 一 2 ( ) + 2 2 )
r 式中 : m :Fra bibliotek驱 动轮质 量; J : 驱动轮转动惯量 ; F 作用在驱动轮上的地面切向反作用力 ; T f , : 驱动轮滚动阻力偶矩 ; F : 驱动轴作用于驱动轮的平行于路面的力 ; r : 驱动车轮半径 : T: 半轴作用于驱动轮的转矩。 3 . 滑 模 变 结 构 控 制 方 法 的 基 本 原 理 滑模变结构控 制是变结构控制系统 的一种控制策 略。这种控制策 略与 常规控制 的根本区别在 于控制 的不连续 性 , 即一 种使系统结 构随
”
+ ’ = ÷ ( 。 ” 一 。 ” 一 2 w v ( w ’ ) + 2 w 。 ) + f — : — 垒
基于模糊控制的全局滑模在机器人系统中的应用

基于模糊控制的全局滑模在机器人系统中的应用张丰【摘要】由于全局滑模控制方法对控制过程具有全程鲁棒性,因此这种方法常用于消除摩擦迟滞现象.但在传统方法的控制函数中,用于补偿摩擦迟滞的增益只取了上界,这样容易使输入力矩产生抖振现象.通过模糊控制自适应调节切换增益的值,对于减小抖振现象有很好的效果.将此算法应用到机器人动力学模型中进行仿真验证,仿真结果证明了该方法的可行性.【期刊名称】《沈阳理工大学学报》【年(卷),期】2015(034)004【总页数】4页(P71-74)【关键词】全局滑模;模糊控制;抖振【作者】张丰【作者单位】绥化学院信息工程学院,黑龙江绥化152061【正文语种】中文【中图分类】TP273由于机械传动过程中运动部件相互配合所造成的摩擦,或者机械加工、装备上的缺陷,必然存在摩擦现象,进而影响系统的品质,严重会使系统出现自激振荡或者发散现象[1]。
因此降低摩擦因素的影响是很有必要的。
很多专家学者对解决摩擦因素造成的影响提出了很多新思路、新方法。
由于滑模变结构控制自身的特点,鲁棒性较好,被越来越广泛的应用于控制系统中。
其中全局滑模控制方法对降低摩擦因素的影响有较好的效果。
传统的全局滑模在有其优点的同时也存在很大弊端,虽然能够过滤摩擦因素的影响,却增大了系统的抖振现象。
本文在全局滑模的基础上进行改进,消除了滑模控制中的趋近阶段,并且通过模糊控制[2]器来确定切换增益,对抑制控制过程中的抖振现象具有明显的效果。
全局滑模控制器的优点在于,它能使系统不必经过趋近过程,直接处于滑动状态。
设系统的状态向量是xd,系统的误差e=xd-x,切换函数形式为[3]s(x,t)=e+ce-F(t),c>0F(t)函数设计的目的是使全局滑动模态得以实现,F(t)=s(0)exp(-λt),λ>0。
s(0)为初始时刻的s(t)。
传统控制律为式中K(t)为摩擦迟滞的界。
假设是估计上界的保裕量。
K(t)用于对不确定项E(t)进行补偿,来满足存在滑动模态的条件[4]。
第03章 连续时间系统滑模变结构控制

3.4 滑模变结构控制器设计基本方法
通过Ackermann公式来求解其参数,具体方法如下:
c eT P( A)
(3.4.4)
An1b
1
其中 e T 0 0 1 b Ab
P( A) ( A 1I )( A 2 I )
( A n1I )
1 , 2 , , n1 为期望选取的特征值。
s cx x
(3.4.1)
为状态,所以,只有 c 0 时, 由于选择 x 和 x 在切换面上的状态运动轨迹才会渐近趋向原点,即 保证了系统为渐近稳定。
【注】规范空间:以状态和状态变化率为坐标构成的空间
3.4 滑模变结构控制器设计基本方法
而选择不同的 c 值时,切换面上的状态运动轨迹趋 向原点的速度是不同的, c 越大,对于相同的 x , x 的变化率越大,从而趋近速度越快。 图3.4.1,切换函数的参数分别选取c 0.8和 c 1.7 作出图示说明。 x
3.3 滑模变结构控制匹配条件及不变性
x Ax B(u Ax)
(3.3.6)
其中有 BA A 。通过设计控制律可实现对不确定 性的完全补偿。 条件式(3.3.5)称为不确定性和系统的完全匹配条件。 (3)当系统同时存在外干扰和不确定性时
x Ax Ax Bu Df
其中有 BD D,通过设计控制律 u 可实现对干扰的 完全补偿。
条件式(3.3.2)称为干扰和系统的完全匹配条件。 (2)当系统存在不确定性时
x Ax Bu Ax
(3.3.4)
滑动模态与不确定性无关的充分必要条件为 (3.3.5) rank B,ΔA rankB 假如式(3.3.5)满足,则系统可化为
滑模控制原理matlab程序
一、概述滑模控制是一种能够有效应对参数变化和外部干扰的控制方法,其原理是通过引入滑动模式,在滑动面上保持系统状态以抑制干扰和变化。
在实际工程中,滑模控制由于其优越的性能和鲁棒性,在许多领域得到了广泛的应用。
本文将探讨滑模控制的原理以及如何利用Matlab编程实现滑模控制。
二、滑模控制的原理滑模控制的核心思想是通过引入滑模面,将系统状态限制在该面上,从而使系统能够快速、稳定地达到期望状态,并能够抵抗外部干扰和参数变化。
滑模控制的设计基于Lyapunov稳定性理论,在这种控制策略下,系统状态会迅速收敛到滑模面上,并在该面上保持稳定。
滑模控制的设计和实现通常包括以下步骤:1. 确定系统模型和状态空间表示。
这一步需要对待控制的系统进行建模,并将其表示为状态空间形式,以便后续控制器设计和分析。
2. 设计滑模面和滑模控制规则。
根据系统模型和性能指标,确定滑模面的设计思路和控制规则。
3. 分析系统的稳定性和鲁棒性。
利用Lyapunov稳定性理论等分析方法,分析设计的滑模控制策略在系统稳定性和鲁棒性方面的性能。
4. 仿真验证和调试。
利用Matlab等仿真软件进行滑模控制器的设计和调试,验证设计的控制策略在仿真环境下的性能。
三、Matlab程序实现滑模控制在Matlab中实现滑模控制通常涉及到以下几个方面的内容:1. 状态空间模型表示首先需要将待控制的系统模型表示为状态空间形式,通常可以利用Matlab中的state-space函数来进行。
对于一个一阶线性系统,可以使用以下代码来表示其状态方程:```A = [0 1; -1 -1];B = [0; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);```2. 滑模面设计和控制规则利用Matlab进行滑模面设计和控制规则的制定通常涉及到一些数学运算和符号计算。
针对一个二阶系统,可以利用Matlab的符号计算工具箱来求解滑模面的方程和控制规则的设计。
自动控制原理MATLAB仿真实验(于海春)
自动控制原理MATLAB仿真实验(于海春)实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入imulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个imulink仿真环境常规模板。
图1-1SIMULINK仿真界面图1-2系统方框图3.在imulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击imulink下的“Continuou”,再将右边窗口中“TranferFen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在imulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的imulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击imulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
铝合金脉冲MIG焊接弧长控制系统

铝合金脉冲MIG焊接弧长控制系统卢立晖;樊丁;黄健康;朱明;石玗【期刊名称】《焊接学报》【年(卷),期】2011(032)009【摘要】针对铝合金脉冲M IG焊接过程中的弧长稳定性问题,建立了弧长控制系统模型,设计了基于比例切换函数的滑模控制器,并采用基于xPC的实时目标环境,建立了铝合金脉冲M IG焊接快速原型的控制平台.利用MATLAB/SIMULINK进行了弧长控制仿真分析,在建立的快速原型控制平台基础上,进行了铝合金脉冲M IG 焊接弧长控制试验.结果表明,利用滑模控制器建立的快速原型控制系统可以实现铝合金脉冲M IG焊接弧长的良好控制,动态响应快、弧长控制稳定,对外部扰动与系统参数摄动具有较强的鲁棒性,保证了铝合金脉冲M IG焊接过程的稳定性.【总页数】4页(P53-56)【作者】卢立晖;樊丁;黄健康;朱明;石玗【作者单位】兰州理工大学甘肃省有色金属新材料重点试验室,兰州730050;兰州理工大学有色金属合金及加工教育部重点试验室,兰州730050;兰州理工大学甘肃省有色金属新材料重点试验室,兰州730050;兰州理工大学甘肃省有色金属新材料重点试验室,兰州730050;兰州理工大学有色金属合金及加工教育部重点试验室,兰州730050【正文语种】中文【中图分类】TG409【相关文献】1.基于快速原型开发平台的铝合金脉冲MIG焊弧长控制 [J], 顾玉芬;王勇佳;樊佳伟;张刚;石玗2.基于DSP的MIG焊接弧长模糊控制系统研究 [J], 于超林;胡绳荪;宋东风;殷凤良3.6061铝合金薄板单脉冲与双脉冲MIG焊接比较分析 [J], 李林;薛家祥;武威;徐志伟4.铝合金T形接头双侧脉冲MIG单道焊接工艺 [J], 陈树君;董海洋;张海沧;闰朝阳5.6082-T6铝合金单脉冲MIG自动焊接头焊后热处理强化 [J], 王亚东;王立刚;孟庆刚因版权原因,仅展示原文概要,查看原文内容请购买。
滑模变结构控制的仿真实现方案研究
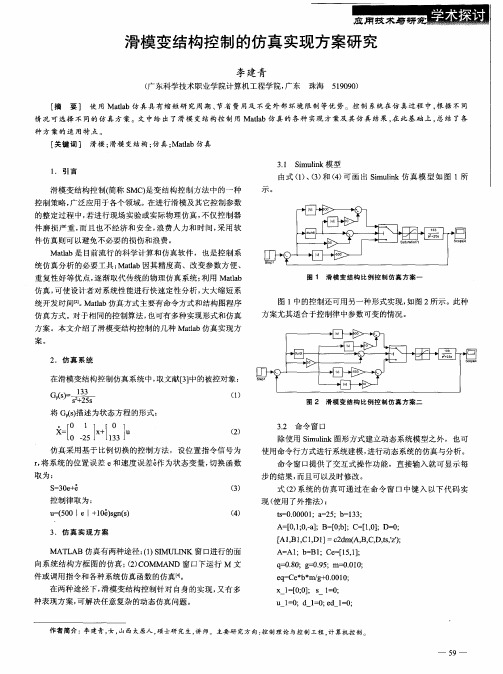
31 Smuik模 型 . i l n
1 引言 .
由 式 () () () 画 出 Smui 1、 3 和 4 可 i l k仿 真 模 型 如 图 1所 n
不 。
滑模变结构控制( 简称 S ) MC 是变结构控制 方法中 的一种
控制策略 , 广泛应用于各个领域 。在进行滑模及其它控 制参 数
r()2 k・ l dl )2d() r l l = )_ ; r( = r - _ ; k r k kd
x= 0 l s00 1 T I k [, ;t .0 ; = ; o =
暴骊砬甬 皎未茸 磷完
r l ;r2 O t l ; 0 = ;c 0 r
_
再建 一个 M 文件 sdn man l ig i. 对 上 述 系 统 求 值 及 绘 i m,
_
f r -1 15 o k : :0
图, 代码 如 下 。
S i i g man m l n d i.
式 () 统 的 仿 真 可 通 过 在 命 令 窗 口 中键 入 以下 代 码 实 2系 现 ( 用 了外 推 法 ) 使 :
控制律取 为: u (o el l ̄sns =5 ol + O) ( g )
3 .仿 真 实现 方 案
() 4
t= , 0 0 ;a 2 ;b 3 ; s 0 0 0 1 = 5 =1 3
将 G(描述为状态方程的形式: o) s
() 1
图 2 滑 模 变 结 构 比例 控 制 仿 真 方 案 二
文『 — 5 1 『 U : j +0J o 2 【133 X 【 0
( 2 )
32 命 令 窗 口 . 除使 用 Sm l k图 形 方 式 建 立 动 态 系 统 模 型 之 外 ,也 可 i ui n
滑模变结构控制方法
20世纪50年代: 前苏联学者Utkin和Emelyanov提出了变结构控制的概念,研究对象:二阶线性系统。 20世纪60年代: 研究对象:高阶线性单输入单输出系统。主要讨论高阶线性系统在线性切换函数下控制受限与不受限及二次型切换函数的情况。 1977年: Utkin发表一篇有关变结构控制方面的综述论文,系统提出变结构控制VSC和滑模控制SMC的方法。同时,在1992年详细讨论了滑模技术。
正常运动段:位于切换面之外, 如图的 段所示。
滑模变结构控制的整个控制过程由两部分组成:
滑模变结构控制的品质取决于这两段运动的品质。由于尚不能一次性地改善整个运动过程品质,因而要求选择控制律使正常运动段的品质得到提高。 选择切换函数使滑动模态运动段的品质改善。两段运动各自具有自己的高品质。 选择控制律 :使正常运动段的品质得到提高。 选择切换函数 : 使滑动模态运动段的品质改善。
滑模变结构控制发展历史
此后 各国学者开始研究多维滑模变结构控制系统,由规范空间扩展到了更一般的状态空间中。 我国学者贡献: 高为炳院士等首先提出趋近律的概念,首次提出了自由递阶的概念。 海洋运载器方面的应用: Yoerger and Slotine (1985), Slotine and Li(1991), Healey and Lienard (1993) and Mc Gookin et al. (2000a, 2000b)
定义1:系统结构 系统的一种结构为系统的一种模型,即由某一组数学方程描述的模型。系统有几种不同的结构,就是说它有几种(组)不同数学表达式表达的模型。 定义2 :滑动模态 人为设定一经过平衡点的相轨迹,通过适当设计,系统状态点沿着此相轨迹渐近稳定到平衡点,或形象地称为滑向平衡点的一种运动,滑动模态的”滑动“二字即来源于此。
用MATLAB对PID控制做简单的仿真

⽤MATLAB 对PID 控制做简单的仿真PID 控制是⽬前⼯程上应⽤最⼴的⼀种控制⽅法,其结构简单,且不依赖被控对象模型,控制所需的信息量也很少,因⽽易于⼯程实现,同时也可获得较好的控制效果。
PID 控制是将误差信号e(t)的⽐例(P),积分(I)和微分(D)通过线性组合构成控制量进⾏控制,其输出信号为:下⾯⽤MATLAB 软件对PID 控制做简单的仿真描述。
1. 建⽴⼆阶负反馈控制系统,其开环传递函数为:clc; clear all; close all;Go = tf(1,conv([2,1],[5,1]));2. ⽐例控制,输出与输⼊偏差成⽐例,即直接将误差信号放⼤或缩⼩。
⽐例控制的传递函数为:取不同的⽐例系数,绘制系统的单位阶跃响应曲线:Kp = [0.5,2,5,10];for m = 1:4 sys = feedback(Kp(m)*Go,1); step(sys); hold on;end随着K P 值的增⼤,系统响应速度加快,但系统的超调也随着增加,调节时间也随着增长。
当K P 增⼤到⼀定值后,闭环系统将趋于不稳定。
⽐例控制具有抗⼲扰能⼒强、控制及时、过渡时间短的优点,但存在稳态误差,增⼤⽐例系数可提⾼系统的开环增益,减⼩系统的稳态误差,从⽽提⾼系统的控制精度,但这会降低系统的相对稳定性,甚⾄可能造成闭环系统的不稳定,因此,在系统校正和设计中,⽐例控制⼀般不单独使⽤。
3. 微分控制,输出与输⼊偏差的微分成⽐例,即与偏差的变化速度成⽐例。
微分控制(与⽐例控制同时使⽤)的传递函数为:取不同的微分系数,绘制系统的单位阶跃响应曲线:Kp = 10;u(t)=[e(t)+e(t)dt +]K P 1T I ∫t 0T D de(t)dt(s)=G O 1(2s +1)(5s +1)(s)=G C K P(s)=(1+s)G C K P T DTd = [0,0.4,1,4];for m = 1:4 G1 = tf([Kp*Td(m),Kp],[0,1]); sys = feedback(G1*Go,1); step(sys); hold on;end随着T D 值的增⼤,系统超调量逐渐减⼩,动态特征有改善。
基于趋近律的滑模控制matlab仿真实例
基于趋近律的滑模控制matlab仿真实例基于趋近律的滑模控制一、基于趋近律的滑模控制 1、控制器的设计针对状态方程??Ax?Bu 〔1〕 x采用趋近律的控制方式,控制律推导如下:s?Cx 〔2〕??Cx??slaw s 〔3〕其中slaw为趋近律。
将状态方程式〔1〕代人〔2〕得?) 〔4〕 u?(CB)?1(?CAx?s?表达式中的切换项。
可见,控制器的抖振程度取决于趋近律s2、仿真实例对象为二阶传递函数: Gp(s)?其中a=25, b=133。
Gp(s)可表示为如下状态方程:??Ax?Bu xbs?as2?01?其中A?? ??0?25? ,?0?B??? 133??。
在仿真程序中,M=1为等速趋近律,M=2为指数趋近律,M=3为幂次趋近律,M=4为一般趋近律。
取M=2,采用指数趋近律,其中C=[15,1] , ε=5,k=10,作图取样时间为0.001,仿真程序如下。
二、程序主程序chap2_4.m clear all; close all;global M A B C eq k ts=0.001; T=2;TimeSet=[0:ts:T]; c=15; C=[c,1]; para=[c];[t,x]=ode45('chap2_4eq',TimeSet,[0.50 0.50],[],para); x1=x(:,1);x2=x(:,2); s=c*x(:,1)+x(:,2); if M==2for kk=1:1:T/ts+1xk=[x1(kk);x2(kk)]; sk(kk)=c*x1(kk)+x2(kk);slaw(kk)=-eq*sign(sk(kk))-k*sk(kk); %Exponential trending lawu(kk)=inv(C*B)*(-C*A*xk+slaw(kk));end end figure(1);plot(x(:,1),x(:,2),'r',x(:,1),-c*x(:,1),'b');xlabel('x1');ylabel('x2'); figure(2); plot(t,x(:,1),'r');xlabel('time(s)');ylabel('x1'); figure(3); plot(t,x(:,2),'r');xlabel('time(s)');ylabel('x2'); figure(4); plot(t,s,'r');xlabel('time(s)');ylabel('s'); if M==2 end子程序chap2_4eq.mfunction dx=DynamicModel(t,x,flag,para) global M A B C eq k a=25;b=133; c=para(1); s=c*x(1)+x(2); A=[0 1;0 -a]; B=[0;b]; M=2; eq=5.0;if M==2 % M=1为等速趋近律,M=2为指数趋近律,M=3为幂次趋近律,M=4为一般趋近律slaw=-eq*sign(s); %Equal velocity trending law elseif M==2 k=10; sl xlabel('time(s)');ylabel('u');u=inv(C*B)*(-C*A*x+slaw); dx=zeros(2,1); dx(1)=x(2);dx(2)=-a*x(2)+b*u;三、仿真结果〔1〕M=2时,指数趋近律10-1-2-3x2-4-5-6-7-8-0.100.10.2x10.30.40.50.6图1 滑模运动的相轨迹0.60.50.40.3x10.20.10-0.100.20.40.60.81time(s)1.21.41.61.82图2 x1 的收敛过程0.50-0.5x2-1-1.5-2-2.500.20.40.60.81time(s)1.21.41.61.82图3 x2 的收敛过程。
MATLAB控制系统各种仿真例题(包括simulink解法)
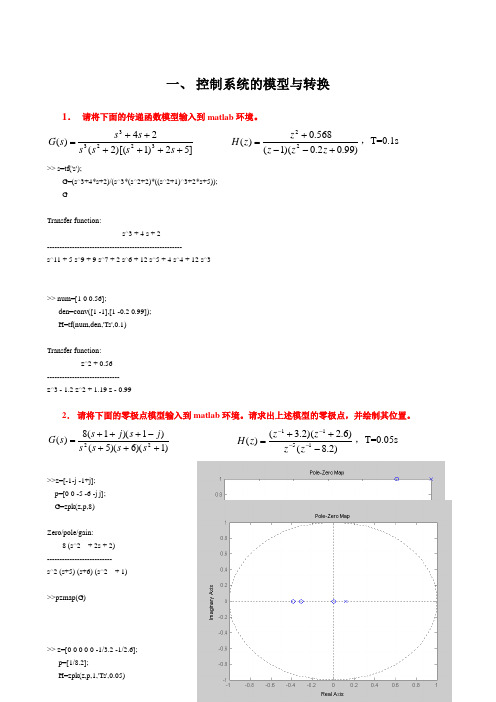
一、 控制系统的模型与转换1. 请将下面的传递函数模型输入到matlab 环境。
]52)1)[(2(24)(32233++++++=s s s s s s s G )99.02.0)(1(568.0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s');G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5)); GTransfer function:s^3 + 4 s + 2 ------------------------------------------------------ s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3>> num=[1 0 0.56];den=conv([1 -1],[1 -0.2 0.99]); H=tf(num,den,'Ts',0.1)Transfer function: z^2 + 0.56 ----------------------------- z^3 - 1.2 z^2 + 1.19 z - 0.992. 请将下面的零极点模型输入到matlab 环境。
请求出上述模型的零极点,并绘制其位置。
)1)(6)(5()1)(1(8)(22+++-+++=s s s s j s j s s G )2.8()6.2)(2.3()(1511-++=----z z z z z H ,T=0.05s>>z=[-1-j -1+j]; p=[0 0 -5 -6 -j j];G=zpk(z,p,8)Zero/pole/gain: 8 (s^2 + 2s + 2) -------------------------- s^2 (s+5) (s+6) (s^2 + 1)>>pzmap(G)>> z=[0 0 0 0 0 -1/3.2 -1/2.6]; p=[1/8.2];H=zpk(z,p,1,'Ts',0.05)Zero/pole/gain:z^5 (z+0.3125) (z+0.3846) ------------------------- (z-0.122)Sampling time: 0.05>>pzmap (H )二、 线性系统分析1. 请分析下面传递函数模型的稳定性。
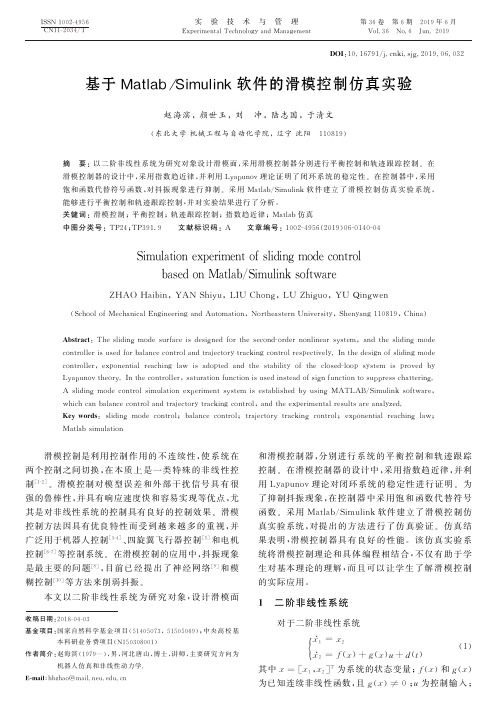
电液伺服系统的滑模变结构控制仿真研究
本文采用 比例切换控制方法设计控制器 【 使 3 ] , 得满足滑动模态存在条件 ,即滑动面 的存在条件 。 取 k | n个状态坐标 , (< ) i } 应有 :
刍 , i
图 1液压伺服控制结构框 图
() 5
式 中 根据 机 理分 析 ห้องสมุดไป่ตู้ 实测 数 据 , 服 阀 的频 宽远 大 伺
1 9
则在 切换 面 上 的 每 一点 都 满 足 滑 动模 态 的存 在 条
度跟踪虽然存在相位滞后 和“ 平顶” 现象 , 但是也优 于传统 PD控制系统的效果。此外 , I 滑模控制系统 的位置跟踪误 差更小。因此 , 滑模控制系统 的响应 速度和控制精度都优于传统的 PD控制系统。 I
维普资讯
第 4 总第 2 期) 期( 9
20 年 7月 08
赢体秸动 控到
nu d Po r T a mi so n Co to i we r ns si n a d nrl
N .S r lN .9 o (ea o2 ) 4 i
电液伺 服 系统 的滑模 变结 构 控 制仿 真研 究
胡永 生 杨 洁 明
(太原理工大学机械 电子工程研究所 山西太原 002 ) 30 4
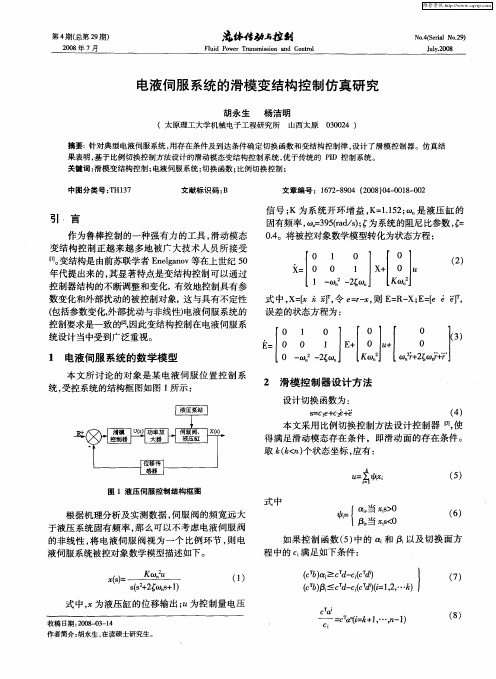
摘要: 针对典型 电液伺服系统 , 用存在条件及到达条件确定切换 函数 和变结构控制律 , 设计 了滑模 控制器 。仿真结 果表 明 , 基于 比例切换控 制方法设计 的滑动模态变结 构控 制系统 , 优于传统的 PD 控制系统 。 I 关键词 : 滑模变结构控制 ; 电液伺服系统 ; 切换函数 ; 比例切换控制 ;
宜 :
1 电液伺服 系统的数学模型
本文所讨论 的对 象是某 电液伺服位置控制系 统, 受控 系统 的结 构框 图如 图 1 所示 :
动态滑模控制在并联机器人中的应用

动态滑模控制在并联机器人中的应用朱彩红【摘要】针对一种以交流伺服电机驱动的并联机器人机构,建立控制模型,设计一种动态滑模控制算法,并进行稳定性分析,在Matlab/Simulink上进行了轨迹跟踪仿真试验.结果表明:该算法鲁棒性好,系统抗干扰能力强,对系统参数变化不敏感,具有良好的跟踪性能.【期刊名称】《苏州市职业大学学报》【年(卷),期】2010(021)001【总页数】4页(P37-40)【关键词】并联机器人;滑模控制;伺服电机;轨迹跟踪【作者】朱彩红【作者单位】苏州市职业大学,电子信息工程系,江苏,苏州,215104【正文语种】中文【中图分类】TP242并联机器人同串联机器人相比,具有刚度大、承载能力高、精度高、结构紧凑等特点,可广泛应用于工业、航空、军事等领域[1].最近几十年,国内外学者对并联机器人的特点、机构学、运动学方面进行了广泛、深入的研究.但是,并联机器人作为一个结构复杂、多变量、多自由度、多参数耦合的非线性系统,其控制策略、控制方法的研究极其复杂.最初设计控制系统时,大多把并联机器人的各个分支当作完全独立的系统来进行控制,控制策略为传统的PID控制,控制效果很不理想.模糊控制方法可以在不要求机器人模型精确的情况下实现机器人的控制,但是模糊控制方法的模糊规则设计比较重要,规则设计的好坏将会直接影响到控制的效果[2],而且该规则的设定需要具有专家知识或是经过多次试验得到,因此在没有相应的条件下,该方法可能无法起到较好的控制效果.滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其他控制策略的不同之处在于系统的“结构”并不固定,而是在动态过程中根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动[3].研究表明[4-6]:滑模变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辩识,物理实现简单等优点.滑模变结构控制方法比较适合并联机器人控制[7-8],因此本文采用了一种新的机器人轨迹跟踪变结构控制方法,即基于动态切换函数的动态滑模控制方法,亦即通过设计新的切换函数或将常规滑模变结构控制中的切换函数s通过微分环节构成新的切换函数σ,该切换函数与系统控制输入的一阶或高阶导数有关,可将不连续项转移到控制的一阶或高阶导数中去,得到在时间上本质连续的动态滑模控制律,可以有效地降低抖振.1 滑模控制器的设计滑模变结构控制器的设计需要完成以下的工作:切换函数s(x)的求取;保证滑动模态的存在;滑动模态稳定性的确定;变结构控制趋近阶段的鲁棒性及动态品质的保证;变结构控制的寻求.考虑如下单入单出n阶仿射非线性系统:式中:x∈R为可测状态变量;u,y∈R分别为系统的输入和输出;f(x),g(x)为已知平滑函数;η为系统中的不确定项,它包括模型不确定性和外加扰动[9].定义误差及切换函数分别为:式中:ei=e(i-1)(i=1,2,…,n)为跟踪误差及其各阶导数,选取常数c1,c2,…,cn-1,使得多项式pn-1 +cn-1pn-2+…+c2p+c1为Hurwite稳定,p为Laplace算子.则构造新的动态切换函数式中λ为严格的正常数.当σ=0时是一个渐近稳定的一阶动态系统,s趋近于零.假设1 不确定性满足有界条件,存在有界函数Bn(x),使得│η│≤Bn(x),x∈Rn,且g(x)符号恒定.假设2 不确定项导数有界即假设3 存在正实数ε,满足动态滑模控制律取为稳定性分析:稳定性是系统的一个基本结构特性,稳定性问题是系统控制理论研究的一个重要课题.将式(2)代入式(4)得则将式(1)、(2)代入式(9)整理得将控制律式(7)代入式(10)得则根据假设1~3得通过李亚普诺夫稳定性分析,得出新的动态切换函数σ满足,即满足滑模变结构控制理论的到达条件,从而验证了系统的稳定性,也就保证了控制器的鲁棒性和动态品质.2 并联机器人控制模型的建立本文研究的少自由度并联机器人具有各支路机构简单,不存在虚约束及工作空间较大等特点[10].机器人系统完整的拉格朗日动力学模型为:式中:q和分别为机器人各关节的位置和速度;τ为n×1阶驱动力矩向量;M,C,G分别为由机器人的具体结构所决定的n×n,n×n和n×1阶函数矩阵.由于式(12)已写成拟线性化的形式,看上去比较简洁.实际上,在本研究的系统中式(12)的展开形式相当复杂.基于机器人关节或支路模型的分散控制系统是目前应用最为广泛的设计方法之一,在工业工程中绝大部分的机器人系统都采用了该类设计方法.对于本文所研究的并联机器人,相互并联的各支路可用图1表示.当机器人关节的驱动装置为交流伺服电机,且忽略等效干扰力矩,可导出机器人各支路的数学模型传递函数为图1 机器人支路模型式中:J'=Lp(Ja+Jm+i2J0);B'=(Rp+KAKi)(Ja+Jm+i2J0)+Lp(Bm+i2B0);W'=(Rp+KAKi) (Bm+i2B0);Kx=3K2tp/2;K=3KAKpreKtp/2.3 实例仿真及分析机器人的交流伺服电动机参数为:Kpre=88,Ki=2.2,KA=6,Ktp=3.41 N·m/A,Lp=0.038 37 H,Rp=5.09 Ω,Ja=0.19 kg·m2,取减速装置的速比为i=40,关节部分在减速装置驱动侧的转动惯量为0.1 kg·m2.由于机构间的耦合作用,系统的等效转动惯量和等效负载阻力系数取J0=40,B0=0.取Jm=0,Bm=0.由此可得交流伺服驱动机器人关节的模型传递函数为转换为状态方程,则有这里f(x)=-0.007x1-18.29x3,g(x)=0.012 5.设期望的跟踪信号为yd=sint,跟踪误差为e=x(1)-yd.n=3时,定义s=c1e+c2+c3,取c1=c2=100,c3=1,λ=3 000,初始条件为x(0)=[0.5 0 0],则动态控制律为:而以Matlab/Simulink构成仿真模型,其中包括两个S—Function,仿真采用ode45,步长0.001 s.仿真结果如图2所示.图2 仿真结果4 结论仿真结果表明,所采用的机器人轨迹跟踪滑模变结构控制方法,即基于动态切换函数的动态滑模控制,具有良好的抗干扰作用和跟踪性能,其研究为进一步实现该并联机器人机构的高精度实时控制奠定了基础.【相关文献】[1] PIEPER J.First order dynamic sliding mode control:Decision and Control,Tampa,December 16-18,1998[C].New York:IEEE Press,c1998.[2] HWANG Chihlyang,CHANG Lijui,YU work-based fuzzy decentralized sliding mode control for car-like mobile robots[J].IEEE Trans.on Industrial Electronics,2007,54(1):574-585.[3] 胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.[4] MOON J,KIM K,KIM Y.Design of missile guidance law via variable structure control [J].Journal of Guidance,Control and Dynamics,2001,24(4):659-664.[5] SATO H,TANAKA M,MATSUNO F.Trajectory tracking control of snake robots based on dynamic model[J].Transactions of the Society of Instrument and Control Engineers,2006,42(6):651-658.[6] 梅红,王勇.快速收敛的机器人滑模变结构控制[J].信息与控制,2009,38(5):553-557.[7] 吴博,吴盛林,赵克定.并联机器人控制策略的现状和发展趋势[J].机床与液压,2005(10):5-8.[8] 王洪斌,王洪瑞,肖金壮.并联机器人轨迹跟踪积分变结构控制的研究[J].燕山大学学报,2003,27(1):25-28.[9] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.[10] 许春山,孙兴进,曹广益.一种新的机器人轨迹跟踪滑模变结构控制[J].计算机仿真,2004,21(7):115-118.。
基于滑模控制的混合动力汽车模式切换控制策略

工 业 技 术DOI:10.16661/ki.1672-3791.2017.30.110基于滑模控制的混合动力汽车模式切换控制策略闻勍鹏 杨树军 唐先智 王波(燕山大学车辆与能源学院 河北秦皇岛 066004)摘 要:为了优化混合动力汽车(HEV)仿真模型对目标车速的跟踪问题,以某混合动力汽车为研究对象,以在Matlab/Simulink中已搭建的整车模型为基础,采用多积分滑模的控制策略,建立驾驶员模型。
该策略针对混合动力汽车不同的运行模式下的需求,分别建立积分滑模面,调节发动机和电动机的转矩,用Lyapunov稳定性分析方法证明了系统的稳定性。
分析结果表明:多积分滑模策略能够跟踪目标车速,并有效的减少模式切换时的车速波动。
关键词:滑模控制 驾驶员模型 车速跟踪 仿真中图分类号:U46 文献标识码:A 文章编号:1672-3791(2017)10(c)-0110-05Abstract:In order to optimize the speed tracking of simulation model of hybrid electric vehicle(HEV). Take a HEV which based on vehicle model that have been build up in the Matlab/Simulink as research object. Establish the driver model using multiple integral sliding mode control strategy. Sliding mode surfaces were presented according to the various demands of different operating modes and the torque of engine and motor are adjusted by the control strategy. The stability of the system was proved by Lyapunov method. The result show that sliding mode control strategy could tracking the target speed and reduce the speed fluctuation when switch mode effectively.Key Words:Sliding mode control; Driver model; Speed tracking; Simulation环境污染和能源短缺促使混合动力汽车发展成为国际汽车工业竞争的热点。
基于切换函数的液压柔性机械臂的滑模控制与仿真

基于 切换 函数 的液 压柔 性机 械臂 的滑 模控 制 与仿真
赵 波 ,王亚美 ,戴丽 ,刘 杰
(.东北大学机械工程与 自 1 动化学院, 辽宁沈阳 100 ; . 1 4 2 辽宁省交通高等专科学校 ,辽宁沈阳 102 ) 0 11 2
摘要 :设计切换 函数的滑模控制器 ,基于柔性 多体动力学理论和拉格 朗 日方程 ,建立三节臂 的桥 梁检测车臂架 的机械 系统动力学模型 ,对该系统进行控制 ,改善梁检测车的柔性机械臂 动力 学特性。在此基础上 ,对桥梁检测 车臂 架采用双闭 环控制 ,结果表明 ,对轻质长臂杆的桥梁检测 车臂架末端轨迹振动有一定 的抑制作用。 关键词 :柔性臂架 ;滑模控制 ;仿 真
2 1 5月 00年
机床与压
MACHI OOL & HYDRAUL CS NE T I
Ma 01 y2 0
第 3 卷 第9 8 期
V0. 8 No 9 13 .
D I 1 .9 9ji n 10 — 8 12 1. 90 3 O : 0 36/. s. 0 1 3 8. 00 0 .3 s
Z O B I ,WA HA o , NG me D 。 U U i Ya i . AIU Je
( . col f c aia E g er gadA t ai ,N r es r nvr t,S ey n ioig10 0 , 1 Sh o o hncl ni e n n uo t n ot at n U i sy hn agLann 10 4 Me n i m o h e ei
Ke wo d : F e i l n p ao ; Si i g Mo e C n rl Smuai n y rs l xb e Ma i u tr l n d o t ; i lt l d o o
基于Matlab_Simulink软件的滑模控制仿真实验
生对基本理论的理解,而 且 可 以 让 学 生 了 解 滑 模 控 制
的实际应用.
1 二阶非线性系统
对于二阶非线性系统
x1 = x2
{
(
1)
x2 = f(
x)+g(
x)
u+d(
t)
T
其中 x = [
为系统的状态变量;f(
x1 ,
t
o
r
r
a
ck
i
ngc
on
t
r
o
l;exponen
t
i
a
lr
e
a
ch
i
ngl
aw;
j
yt
y wo
Ma
t
l
abs
imu
l
a
t
i
on
滑模控制是利用 控 制 作 用 的 不 连 续 性,使 系 统 在
两个控制之间切换,在 本 质 上 是 一 类 特 殊 的 非 线 性 控
制
.滑模控制对 模 型 误 差 和 外 部 干 扰 信 号 具 有 很
Ab
s
t
r
a
c
t:Thes
l
i
d
i
ng modesu
r
f
a
c
ei
sde
s
i
o
rt
hes
e
c
ond
G
o
r
de
rnon
l
i
ne
a
rsy
s
t
em,andt
基于MPC的永磁同步电机最优滑模控制

基于MPC的永磁同步电机最优滑模控制郑江平;李超【摘要】为了解决永磁同步电机PMSM (Permanent magnet synchronous motor)控制过程中存在的扰动不确定性,常规变结构控制的调节增益较大,存在抖振现象的问题,研究一种基于模型预测控制MPC(Model predictive control)的PMSM最优滑模速度控制策略.以模型预测控制作为电流内环,结合最优控制与滑模控制各自的优势,设计最优滑模速度控制器,有效抑制了超调,提高了系统的启动性能.设计扰动观测器并对系统进行前馈补偿,有效地抑制了不确定性扰动,提高了调速系统的抗扰性能.利用李雅普诺夫理论证明了控制系统的稳定性.仿真结果验证了系统具有良好动态性能和鲁棒性.【期刊名称】《计算机应用与软件》【年(卷),期】2018(035)007【总页数】6页(P38-42,68)【关键词】最优滑模控制;永磁同步电机;鲁棒性;扰动观测器【作者】郑江平;李超【作者单位】辽宁工程技术大学电气与控制工程学院辽宁葫芦岛 125105;山东医学高等专科学校附属医院山东临沂 276000【正文语种】中文【中图分类】TP2730 引言永磁同步电机PMSM具有体积小、结构简单、转动惯量较小、过载能力强等多方面的优点,现如今已被大量运用于新能源汽车、航空航天、机器人等许多工程领域。
常规的PID调节方式已经远不能满足高性能的控制需求,对于交流PMSM控制系统的研究具有重要的现实意义[1-4]。
随着现代的非线性控制方法的不断发展,许多先进的控制方法已经实现PMSM的良好控制性能。
然而,在调速过程中系统往往存在不确定性干扰,从而影响系统的稳定性。
针对PMSM调速系统存在的不确定性干扰的扰动观测器的研究,越来越受到研究人员的关注。
文献[5]提出一种针对多输入输出控制系统干扰抑制问题的非线性干扰观测器。
文献[6]设计了一种基于标准扩张状态观测器的控制方法,仅适用于一类单输入单输出的系统不可或缺的链相匹配的不确定性。
导弹自抗扰控制 matlab -回复

导弹自抗扰控制matlab -回复标题:导弹自抗扰控制的MATLAB实现一、引言导弹自抗扰控制是一种先进的控制策略,主要用于解决导弹在飞行过程中面临的各种不确定性因素和外部干扰。
这种控制策略能够使导弹在复杂环境中保持稳定性和精确性,从而提高其打击效果和生存能力。
MATLAB作为一种强大的数值计算和仿真工具,被广泛应用于导弹自抗扰控制的研究和设计中。
二、导弹自抗扰控制的基本原理导弹自抗扰控制主要基于滑模控制和自适应控制理论。
滑模控制通过设计一个切换函数和一个滑动模态表面,使得系统能够在一定条件下快速到达并保持在滑动模态表面上,从而消除干扰的影响。
自适应控制则通过在线估计和补偿系统的未知参数和不确定性,使得控制系统能够在不确定环境下保持稳定性和性能。
三、导弹自抗扰控制的MATLAB实现步骤1. 系统建模:首先,需要对导弹的运动进行建模。
这通常包括导弹的六自由度模型、推进系统模型、气动模型、制导和控制系统模型等。
这些模型可以通过物理原理或者实验数据进行建立,并在MATLAB中用相应的函数和方程表示。
2. 控制器设计:然后,根据导弹自抗扰控制的基本原理,设计控制器。
这包括设计切换函数、滑动模态表面、自适应律等。
这些设计过程可以通过MATLAB的符号计算工具箱进行,以便于进行理论分析和优化。
3. 仿真验证:接下来,将设计的控制器与系统模型结合起来,进行仿真验证。
这可以通过MATLAB的Simulink工具箱进行,可以方便地设置各种仿真条件和参数,观察和分析系统的动态响应和性能。
4. 参数调整和优化:根据仿真结果,可以对控制器的参数进行调整和优化,以提高系统的稳定性和性能。
这可以通过MATLAB的优化工具箱进行,可以自动或手动搜索最优参数。
5. 实验验证:最后,如果可能的话,可以将设计的控制器在实际的导弹系统上进行实验验证,以进一步验证其有效性。
四、实例分析以下是一个简单的导弹自抗扰控制的MATLAB实现例子:假设我们有一个导弹的线性化模型如下:dx/dt = Ax + Bu + w其中,x是状态向量,u是控制输入,w是外部干扰。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于比例切换函数的滑模控制
一、仿真实例
考虑如下时变对象: as
s b s Gp +=2)( (2.29) 其中255sin(6)a t π=+,13350sin(2)b t π=+
将传递函数描述为状态方程的形式:
Bu Ax x
+= (2.30) 其中A=⎢⎣⎡00 ⎥⎦⎤-a 1 , B=⎥⎦
⎤⎢⎣⎡b 0 采用基于比例的切换函数控制方法,1S =为阶跃响应,2S =为正弦响应。
在控制律中,取30c =,500α=,10β=。
二、仿真主程序:
主程序:chap2_1.m
clear all;
close all;
global S A F c alfa beta
xk=[0,0];
ts=0.001;
T=1;
TimeSet=[0:ts:T];
[t,y]=ode45('chap2_1eq',TimeSet,xk,[],[]);
x1=y(:,1);
x2=y(:,2);
if S==1
rin=1.0;
drin=0;
elseif S==2
rin=A*sin(F*2*pi*t);
drin=A*F*2*pi*cos(F*2*pi*t);
end
e1=rin-x1;
e2=drin-x2;
s=c*e1+e2;
for k=1:1:T/ts+1
u(k)=(alfa*abs(e1(k))+beta*abs(e2(k)))*sign(s(k)); end
figure(1);
plot(t,rin,'r',t,y(:,1),'b');
xlabel('time(s)');ylabel('Position tracking');
figure(2);
plot(t,u,'r');
xlabel('time(s)');ylabel('u');
figure(3);
plot(e1,e2,'r',e1,-c*e1,'b');
xlabel('time(s)');ylabel('Phase trajectory');
控制子程序:chap2_leq.m
function dx=PlantModel(t,x,flag,para)
global S A F c alfa beta
dx=zeros(2,1);
S=1; %S=1时为阶跃响应,S=2时为正弦响应%
if S==1
rin=1.0;
drin=0;
elseif S==2
A=0.5;F=3;
rin=A*sin(F*2*pi*t);
drin=A*F*2*pi*cos(F*2*pi*t);
end
c=30;
alfa=500;
beta=10;
e1=rin-x(1);
e2=drin-x(2);
s=c*e1+e2;
u=(alfa*abs(e1)+beta*abs(e2))*sign(s);
dx(1)=x(2);
dx(2)=-(25+5*sin(3*2*pi*t))*x(2)+(133+50*sin(1*2*pi*t))*u;
三、仿真结果
1.1
S 阶跃响应
图2-1 阶跃响应
图2-2 控制器输出
图2-3 滑模运动轨迹
2.2
S 为正弦响应
图2-4 正弦响应
图2-5 控制器输出
图2-6 滑模运动轨迹。