机器人软极限相关参数
工业机器人的基本参数和性能指标

工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
YAMAHA 机器人和PLC通讯指令
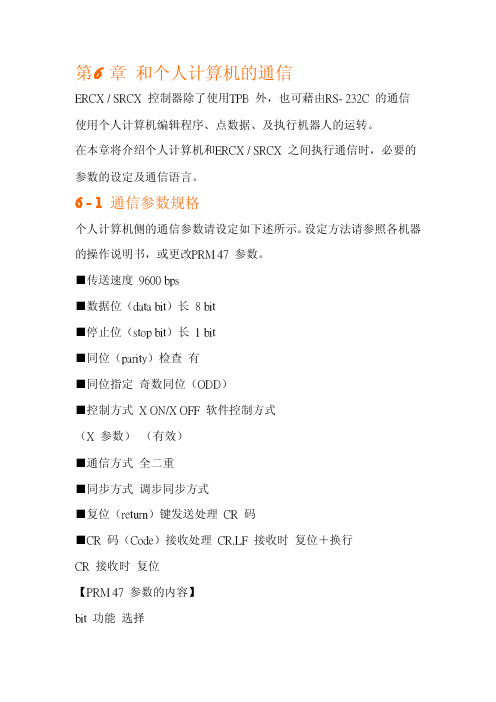
第6章和个人计算机的通信ERCX/SRCX控制器除了使用TPB外,也可藉由RS-232C的通信使用个人计算机编辑程序、点数据、及执行机器人的运转。
在本章将介绍个人计算机和ERCX/SRCX之间执行通信时,必要的参数的设定及通信语言。
6-1通信参数规格个人计算机侧的通信参数请设定如下述所示。
设定方法请参照各机器的操作说明书,或更改PRM47参数。
■传送速度9600bps■数据位(data bit)长8bit■停止位(stop bit)长1bit■同位(parity)检查有■同位指定奇数同位(ODD)■控制方式X ON/X OFF软件控制方式(X参数)(有效)■通信方式全二重■同步方式调步同步方式■复位(return)键发送处理CR码■CR码(Code)接收处理CR.LF接收时复位+换行CR接收时复位【PRM47参数的内容】bit功能选择15~9预约设为08结束码0:CR+LF1:CR7~4传输速率0:9600bps1:300bps2:600bps3:1200bps4:2400bps5:4800bps6:9600bps7~15:不可设定3数据位长0:8bit1:7bit2停止位长0:1bit1:2bit1~0同位检查0:奇数1:偶数2~3:无6-2通信电缆规格注意:控制器侧连接器的第10、12、18、2l pin为和TPB连接专用,为了防止事故,请勿配线。
当个人计算机侧的机器采用独自的配线规格时,务必确认使用机器的规格后再行配线。
6-2-1对方侧为D-sub25pin的连接器时连接器型式适合连接器型号:XM2A-2501(OMRON制)或其同类产品适合连接器外盖型号:XM2S-2511(OMRON制)或其同类产品6-2-2对方侧为D-sub9Pin的连接器时控制器侧连接器型式适合连接器型号:XM2A-2501(OMRON制)或其同类产品适合连接器外盖型号:XM2S-2511(OMRON制)或其同类产品对方侧连接器型式适合连接器型号:XM2D-0901(OMRON制)或其同类产品适合连接器外盖型号:XM2S-0913(OMRON制)或其同类产品SHELL指的是连接器的金属外壳部份。
工业机器人的基本参数和性能指标知识讲解

工业机器人的基本参数和性能指标工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
工业机器人的技术参数课件

分辨率
? 分辨率指能够由执行器完成的 最小增量距离 。 ? 分辨率不仅与关节位置编码器的分辨率,或
伺服电动机和传动装置的步长有关,还受系 统摩擦、扭曲、齿隙游移和运动的配置的影 响。
? 多节点串联连接机械臂的有效分辨率不如其 单个关节的分辨率。
? 不仅决定于负载的质量, 还必须将 末端执行器的质量和惯性力 列入考 虑范围。
? 承载能力这一技术指标是指 高速运行时 的承载能力。
刚度(Stiffness)
? 刚度指机身或臂部在外力作用下 抵抗弹性 变形的能力 。
? 刚度 = 外力:变形量(位移) ? 零件的刚度(或称刚性)常用单位变形所
需的力或力矩 来表示,刚度的大小取决于 零件的几何形状 和材料种类(即材料的弹 性模量)。
? 利用冗余的自由度可以增加机器人的灵活性, 躲避障碍物和改善动力性能。
ABB1410机器人
自由度(Degree of freedom)
? 它是衡量机器人适应性和灵活性的重要指标。 自由度越高, 机器 人的灵活性也是相应的增加 ,功能也是会相应增加,但是自由度 越高,控制越复杂, 而且随着关节的增加,调试的复杂程度也会 相应增加,系统潜在的机械共振点也不成比例的增加。333 Nhomakorabea2
2
2
2
C
C
1
1
1
1
要定位 的球体
要定位 的球体
3
4
45
5
要定位的 要定位的 旋转钻头 旋转钻头
(a)
(a)
(b) (b)
自由度(Degree of freedom)
? 工业机器人的自由度是根据其用途而设计的, 可能小于6个自由度,也可能大于 6个自由度。
机器人性能指标
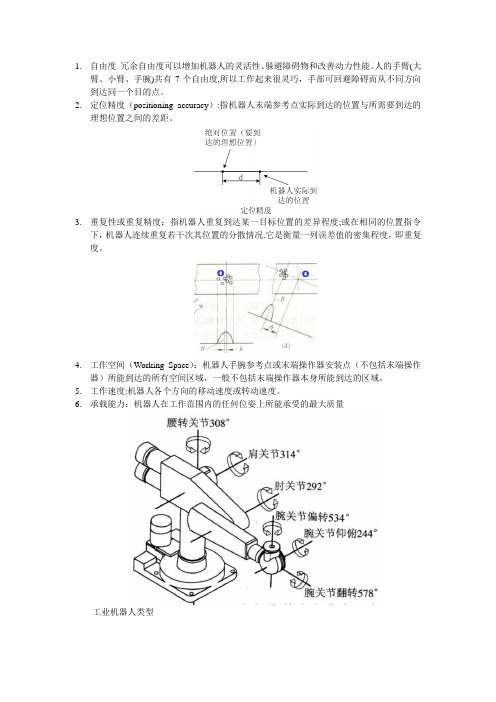
1.自由度冗余自由度可以增加机器人的灵活性、躲避障碍物和改善动力性能。
人的手臂(大臂、小臂、手腕)共有7个自由度,所以工作起来很灵巧,手部可回避障碍而从不同方向到达同一个目的点。
2.定位精度(positioning accuracy):指机器人末端参考点实际到达的位置与所需要到达的理想位置之间的差距。
3.重复性或重复精度:指机器人重复到达某一目标位置的差异程度;或在相同的位置指令下,机器人连续重复若干次其位置的分散情况.它是衡量一列误差值的密集程度,即重复度。
4.工作空间(Working Space):机器人手腕参考点或末端操作器安装点(不包括末端操作器)所能到达的所有空间区域,一般不包括末端操作器本身所能到达的区域。
5.工作速度:机器人各个方向的移动速度或转动速度。
6.承载能力:机器人在工作范围内的任何位姿上所能承受的最大质量工业机器人类型首先要知道的是你的机器人要用于何处。
这是你选择需要购买的机器人种类时的首要条件。
如果你只是要一个紧凑的拾取和放置机器人,Scara机器人是不错的选择。
如果想快速放置小型物品,Delta机器人是最好的选择。
如果你想机器人在工人旁边一起工作,你就应该选择协作机器人.下面是一些具体的指标.机器人负载负载是指机器人在工作时能够承受的最大载重。
如果你需要将零件从一台机器处搬至另外一处,你就需要将零件的重量和机器人抓手的重量计算在负载内.自由度(轴数)机器人轴的数量决定了其自由度。
如果只是进行一些简单的应用,例如在传送带之间拾取放置零件,那么4轴的机器人就足够了。
如果机器人需要在一个狭小的空间内工作,而且机械臂需要扭曲反转,6轴或者7轴的机器人是最好的选择。
轴的数量选择通常取决于具体的应用。
需要注意的是,轴数多一点并不只为灵活性。
事实上,如果你在想把机器人还用于其它的应用,你可能需要更多的轴,“轴”到用时方恨少。
不过轴多的也有缺点,如果一个6轴的机器人你只需要其中的4轴,你还是得为剩下的那2个轴编程。
机器人灵敏度分析及其参数实现
机器人灵敏度分析及其参数实现机器人技术在近年来得到了快速发展。
随着机器人的应用场景越来越广泛,其灵敏度成为了一个越来越重要的问题。
机器人灵敏度是机器人在处理物理变化和环境改变时的反应能力,它直接影响到机器人的定位和控制精度。
一、机器人灵敏度的意义机器人的灵敏度是衡量其反应能力的一个指标,在机器人的设计和应用过程中具有重要的意义。
灵敏度越高,机器人在操作时能够更快地作出反应,处理物理变化和环境改变的能力也更加强大。
例如,在一些需要精准定位的操作场景中,机器人的灵敏度起到关键作用。
如果机器人的灵敏度不够高,在操作过程中就会存在误差,导致操作失败。
因此,机器人灵敏度的提高具有重要的意义,可以保证机器人的操作精度,提高机器人的工作效率。
二、机器人灵敏度的影响因素机器人灵敏度的影响因素很多,包括机器人的结构设计、传感器的选择和精度等。
其中,最重要的因素是机器人的传感器,传感器的质量和精度直接影响着机器人的灵敏度。
传感器的选择通常会受到以下几个因素的影响:1、应用场景的不同。
根据不同的应用场景,需要选择不同类型和精度的传感器。
例如,在机器人的精准定位场景中,需要选择高精度、高分辨率的传感器。
2、成本因素。
传感器的成本通常会随着其精度的提高而增加,因此在选择传感器时,还需要考虑成本的因素。
3、传感器的重量。
传感器的重量会影响机器人的运动性能,因此需要在传感器的性能和重量之间进行权衡。
在选择传感器之后,还需要对传感器进行参数的配置和优化,以实现最佳的灵敏度效果。
三、如何实现机器人灵敏度优化机器人灵敏度的实现需要对机器人进行全面的参数优化。
参数优化包括以下几个步骤:1、传感器参数的优化。
传感器的参数优化包括选择合适的传感器精度、扫描频率等参数,以实现最佳的反应能力。
2、运动参数的优化。
运动参数的优化包括机器人的速度、加速度、减速度等参数的调整,以保证机器人在运动过程中具有更好的响应能力。
3、控制参数的优化。
控制参数的优化包括机器人的控制算法、PID参数等的调节,以保证机器人具有更快的反应速度和更好的稳定性。
ABB机器人系统参数

ABB机器人系统参数ABB机器人系统是一种用于工业自动化的先进技术。
ABB机器人系统包括机器人本身、控制系统、传感器和其他附件。
机器人系统参数主要包括尺寸、负载能力、速度、精度和安全性等方面。
下面将详细介绍ABB机器人系统的参数。
首先是尺寸参数。
ABB机器人系统的尺寸主要考虑到机器人在工作空间内的占用空间。
通常包括机器人的高度、宽度、长度和重量等。
这些参数决定了机器人在工作环境中占据的空间大小,从而影响工作场所的布局和机器人系统的设计。
其次是负载能力参数。
负载能力是指机器人能够承受的最大重量。
ABB机器人系统根据应用需求提供不同负载能力的机器人,从几公斤到数十公斤不等。
负载能力参数对于机器人的应用范围和功能起到决定性的作用。
根据不同的负载能力,机器人可以用于不同的工作场景,如组装、搬运、焊接、喷涂等。
第三是速度参数。
速度是指机器人在工作过程中移动的速度。
ABB机器人系统具有高速度、高精度的特点,可以提高工作效率和生产效益。
机器人的速度参数包括最大加速度、最大速度和关节速度等。
机器人的速度参数直接影响工作速度和产品生产效率。
第四是精度参数。
精度是指机器人在工作过程中的定位精度和重复性。
ABB机器人系统具有很高的运动精度和位置重复性,可以实现高精度的工作操作。
精度参数包括机器人的位置精度、姿态精度、重复性和偏差等。
机器人精度参数直接影响产品的质量和可靠性。
最后是安全性参数。
安全性是指机器人在工作过程中对操作员和周围环境的安全性能。
ABB机器人系统通过设计安全控制系统、传感器和防撞装置等来保证工作过程中的安全性。
安全性参数包括机器人的紧急停止功能、碰撞检测和回避功能、机器人臂和末端工具的碰撞力控制等。
机器人的安全性参数对于保护操作员和设备的安全至关重要。
综上所述,ABB机器人系统的参数包括尺寸、负载能力、速度、精度和安全性等方面。
这些参数决定了机器人的应用范围和性能特点,对于工业自动化具有重要意义。
不断提高机器人系统的参数,将进一步推动工业自动化技术的发展和应用。
3 工业机器人主要技术参数

1.2.2工业机器人技术参数工业机器人制造商在产品供货时一般会提供相应的技术数据.如表1-1为FANUC工业机器人机器人M-10iA/12的主要技术参数。
M-10iA主要技术参数M-10iA运动范围M-10iA机器人本体配置Item / 名称Specification / 配置1 Wrist flange (ISO) / 法兰盘(ISO) Standard Type / 标准型2 Transportation tool / 搬运工具Eyebolt/ 运输吊环3 Mechanical mastering mark / 零位标签Scribe mark / 机械划线零位表示4 Axis limitation / 轴限位J1轴5 Robot connection cable / 机器人连接电缆Non-Flex 7m /非柔性电缆7米6 Robot mechanical cable (Base to J3)机器人机体内电缆(底座到J3轴)Air×2/ 气管(2根)EE / EE信号线8进8出R-30iB_Contorller Mate型控制箱体(M-10iA)※ 主控制轴卡支持最多24根轴,且可通过辅助轴卡支持最多36根轴※ 可快速更换的放大器(小于5分钟)※ 彩色,具网络浏览功能,易于编程且可自定义用户界面的iPendant※ 多样的I/O 连接方式针对各种应用的丰富的软件功能包R-30iB 控制器配置 尽管各厂商所提供的技术参数项目是不完全一样的,工业机器人的结构、用途以及用户的要求也不同,但是,工业机器人的主要参数一般都应有:自由度、工作精度、工作范围、最大工作速度、承载能力等。
1)自由度自由度是指机器人所具有的独立坐标轴运动的数目,不包括末端执行器(手爪)的开合自由度。
如.表1-2所示的单自由度关节通常实现平移、回转或旋转运动。
在完成某一特定作业时具有多余自由度的机器人就叫做冗余自由度机器人。
SCARA机器人直线运动下的,软限位,极限点求解算法
SCARA机器人直线运动下的极限点求解算法摘要:针对SCARA机器人末端在做直线运动时难以判定是否到达极限位置的问题,提出一种基于几何学的求解算法,用于精确计算出任意末端位置与可变工作空间条件下的直线运动极限点位置坐标值。
并分别在左、右手系下通过MATLAB理论仿真与VC实际开发相对应的方式验证了该算法的正确性和可行性。
关键词:SCARA机器人;直线运动;极限点;MATLAB;VC1. 引言SCARA机器人(Selective Compliance Assembly Robot Arm,选择顺应性装配机器手臂)是一种四轴机械手,它的第一、二、四轴具有转动特性,而第三轴具有线性移动特性,故其工作空间类似于一个扇形柱体区域。
SCARA机器人主要用于完成搬运、装配等职能工作,目前广泛应用于汽车、电子、塑料、药品、食品等工业领域。
当SCARA机器人在流水线上进行往复运动时,其末端点经常会处于直线运动状态。
由于末端位置与工作空间会随实际工况的要求而发生变化,预先确定末端在直线运动下的极限点坐标,并提前设定软件限位,对于防止过度驱动或错误操作下的机器人碰撞与损坏,具有非常重要的现实意义。
因此,本文基于几何学理论,提出一种用于求解末端直线运动下的极限点位置坐标的算法。
2. 算法设计假定SCARA机器人的基座安装在水平面内,依照从基座到末端的顺序,将其四个轴分别命名为X、Y、Z、R轴,且将R轴末端视为一个点(设为End),若在R轴末端安装夹具,则将夹具末端也视为一个点(设为Tip)。
2.1 前提条件本算法的实现基于如下三个客观前提条件:(1)由于Z轴仅在竖直平面内做上下运动,并不会影响End点的水平面投影位置。
而在不安装夹具的情况下,R轴的旋转运动也不会对此产生影响;再者,由于夹具没有附带对应的驱动装置,即使安装夹具也仅相当于将End点的水平面投影点在二维空间内相对平移了一个固定的矢量位置,扩展了一定的工作空间范围,但求解Tip点的直线运动极限点坐标的思想与End点完全一致。
工业机器人技术基础3.2工业机器人的技术参数-课件
(a)
(a)
(b)
(b)
自由度(Degree of freedom)
• 工业机器人的自由度是根据其用途而设 计的,可能小于6个自由度,也可能大于 6个自由度。 • 冗余自由度机器人:在完成某一特定作 业时具有多余自由度的机器人,亦简称 冗余度机器人。 • 利用冗余的自由度可以增加机器人的灵 活性,躲避障碍物和改善动力性能。
• 工业机器人在同一条件下用同一方法操作时,重复n次所测
得的位置与姿态的一致程度。往复运动的物体,每次停止
的位置与设定次数取得的平均值之间角度或长度的差值,
差值越小,精度越高。
重复定位精度(Repeatability)
• 从同样的初始位置开始,采用同样的程序,载荷和安装设
定,机械臂能够回到初始位置时的距离。
• (a)重复定位精度的测定;(b)合理定位精度,良好重复 定位精度; • (c)良好定位精度,很差重复定位精度;(d)很差定位精
工作空间(Working space)
• 工作空间指机器人手腕参考点或末端操作器安装点(不 包括末端操作器)所能到达的所有空间区域,一般不包 括末端操作器本身所能到达的区域。
连杆 关节
主要内容
工作范围
最大速度
加速度
自由度
承载能力 定位精度
重复定位精度
刚度
分辨率
连杆
• 连杆指机器人手臂上被相邻两关节分开的刚性杆件,其两
端分别与主动和从动构件铰接以传递运动和力。
连杆
• 关注的重点是在弯曲和扭转时的连杆刚度。为了提供一定
刚度,机器人的连杆常设计成梁或壳(单体壳)的结构。
加速度
• 加速度既影响总体运动时间,也影响运行周期时间(总
移动工业机器人测试系统技术参数
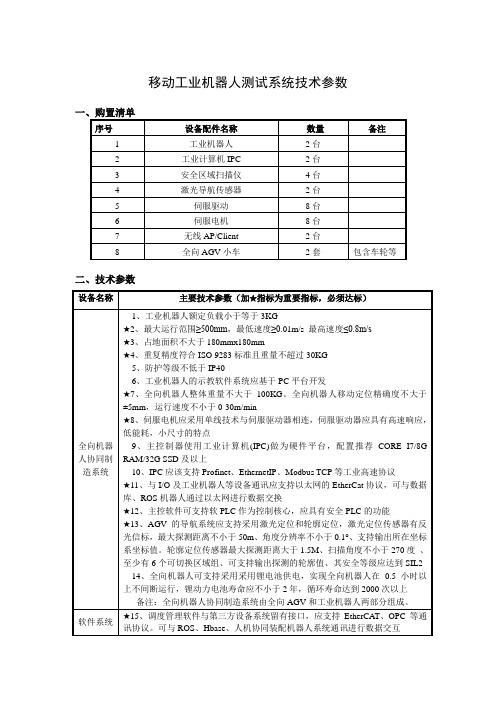
★2、最大运行范围≥500mm,最低速度≥0.01m/s最高速度≤0.8m/s
★3、占地面积不大于180mmx180mm
★4、重复精度符合ISO 9283标准且重量不超过30KG
5、防护等级不低于IP40
6、工业机器人的示教软件系统应基于PC平台开发
★7、全向机器人整体重量不大于100KG。全向机器人移动定位精确度不大于±5mm,运行速度不小于0-30m/min
移动工业机器人测试系统技术参数
一、购置清单
序号设备配件名称数量备注1工业机器人
2台
2
工业计算机IPC
2台
3
安全区域扫描仪
4台
4
激光导航传感器
2台
5
伺服驱动
8台
6
伺服电机
8台
7
无线AP/Client
2台
8
全向AGV小车
2套
包含车轮等
二、技术参数
设备名称
主要技术参数(加★指标为重要指标,必须达标)
全向机器人协同制造系统
★8、伺服电机应采用单线技术与伺服驱动器相连,伺服驱动器应具有高速响应,低能耗,小尺寸的特点
9、主控制器使用工业计算机(IPC)做为硬件平台,配置推荐CORE I7/8G RAM/32G SSD及以上
10、IPC应该支持Profinet、EthernetIP、Modbus TCP等工业高速协议
★11、与I/O及工业机器人等设备通讯应支持以太网的EtherCat协议,可与数据库、ROS机器人通过以太网进行数据交换
其他
1、报名资质要求:经销商需要出具生产厂家针对该项目授权函原件以及生产厂家对该项目出具的售后服务承诺书原件。
工业机器人的性能特征-工业机器人主要技术参数

工业机器人的性能特征-工业机器人主要技术参数工业机器人的性能特征1、自由度自由度是衡量机器人技术水平的主要指标。
所谓自由度是指运动件相对于固定坐标系所具有的独立运动。
每个自由度需要一个伺服轴进行驱动,因而自由度数越高,机器人可以完成的动作越复杂,通用性越强,应用范围也越广,但相应地带来的技术难度也越大。
一般情况下,通用工业机器人有3—6个自由度。
2、工作空间是指机器人应用手爪进行工作的空间范围。
描述工作空间的手腕参考点可以选在手部中心、手腕中心或手指指尖,参考点不同,工作空间的大小、形状也不同。
机器人的工作空间取决于机器人的结构形式和每个关节的运动范围。
工作空间是工业机器人的一个重要性能指标,是设计工业机器人机构的重要指标。
3、承载能力承载能力是指机器人在工作范围内的任何位姿上所承受的最大重量,承载能力的大小取决于负载的质量、运行的速度和加速度的大小和方向,根据承载能力不同工业机器人大致分为:①微型机器人—承载能力为10N以下;②小型机器人—承载能力为10-50N;③中型机器人—承载能力为50-300N;④大型机器人承载能力为300—500N;⑤重型机器人—承载能力为500N以上。
4、运动速度运动速度影响机器人的工作效率和运动周期,它与机器人所提取的重力和位置精度均有密切的关系。
运动速度高,机器人所承受的动载荷增大,必将承受着加减速时较大的惯性力,影响机器人的工作平稳性和位置精度。
就目前的技术水平而言,通用机器人的最大直线运动速度大多在1000mm/s以下,最大回转速度一般不超过120°/s。
5、位置精度它是衡量机器人工作质量的又一项技术指标。
工业机器人的位置精度包括定位精度和重复定位精度,定位精度取决于位置控制方式以及机器人运动部件本身的精度和刚度,此外还与提取重力和运动速度等因素有密切的关系。
重复定位精度是机器人重复定位某一位置的准确性,典型的工业机器人定位精度一般在土O.02mm~±5mm范围。
NAO机器人技术参数
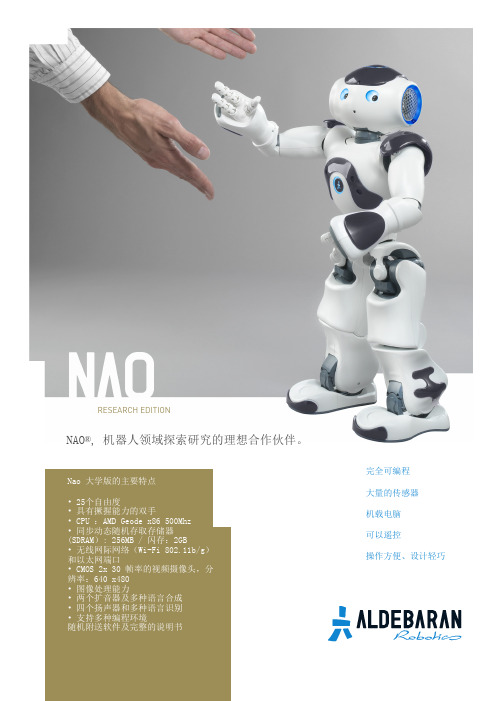
NAO®, 机器人领域探索研究的理想合作伙伴。
Nao 大学版的主要特点
• 25个自由度 • 具有撅握能力的双手 • CPU :AMD Geode x86 500Mhz N•ao同Ac步ade动mi态cs 随Edi机tion存ke取y fe存atu储re器s (SDRAM): 256MB / 闪存:2GB -•25无De线gre网es际of F网re络edo(m Wi-Fi 802.11b/g) -和Tw以o p太reh网en端sile口hands -•x8C6MAOMSD G2exode30500帧Mh率z C的PU视频摄像头,分 -辨25率6 M:B S6D4R0AMx4/ 280GB Flash memory • 图像处理能力 -•Wi两-Fi个802扩.11音b a器nd及eth多er种net语po言rt 合成 -•2x四30个FP扬S C声MO器S v和ide多oca种m 语res言. 64识0x4别80 -•Vis支ion持pr多oce种ssi编ng程cap环ac境ities -随Tw机o l附oud送spe软ak件ers及an完d E整ngl的ish说vo明cal书synthesis
Nao®是一个身高58公分的两足机器人。它是Aldebaran RoboticsTM 公司四年潜心研究的成果,集多种软、硬件为一身,兼有出色的外 形设计。 Nao是同类机器人中的佼佼者。其硬件采用最新科技设计制造,保证 了Nao动作的流畅性,还配备了多种传感器。此外,Nao可在Linux、 Windows或Mac OS X等操作系统下编程,并随机提供完整的软件和使 用说明书。
整体特性
机体规格与材料
高度 重量 机体材料
能量
充电器 电池能量
工业机器人的特性参数和技术要求(5篇)
工业机器人的特性参数和技术要求(5篇)第一篇:工业机器人的特性参数和技术要求工业机器人的特性参数工业机器人的主要特性参数有:(1)坐标型式;常用的坐标型式有直角坐标、圆柱坐标、球坐标、关节坐标等。
(2)运动自由度数,自由度数表示机器人动作的灵活程度。
一般少于6个,也有多于6个的。
(3)各自由度的动作范围,指各关节的活动范围。
各关节的基本动作范围决定了机器人操作机工作.空间的形状和大小。
(4)各自由度的动作速度,指各关节的极限速度。
(5)额定负载,指在规定性能范围内,在手腕机械接口处所能承受的最大负载允许值。
(6)精度。
主要包括位姿精度、位姿重复性、轨迹精度、轨迹重复性等。
工业机器人的技术要求包括:外观和结构电气设备、可靠性(用平均无故障工作时间(MTBF)及可维修时间(MTTR)衡量)和安全性(应满足《工业机器人安全规范》(GBll291—89)的规定)。
第二篇:电梯参数及技术要求电梯货物清单及技术要求一、电梯参数表1、自动扶梯:要求角度:30°,运行速度:0.5米/秒,输送能力:9000人/小时,梯级宽度:1000mm, 运行方式:变频低速待机2、货梯:载重量:2000KG,运行速度:1.0米/秒,一层为双方向开门,其余层为单方向开门3、客梯:消防电梯兼客梯:载重量:825KG,运行速度:1.75米/秒,轿厢尺寸要求宽度≥1400mm,深度≥1350mm;担架电梯兼无障碍电梯:载重量≥1000KG,运行速度:1.75米/秒,轿厢尺寸要求宽度≥1100mm,深度≥2100mm;注:以上所述尺寸均须依现场实测核对后方可进行电梯装配施工,要求电梯厂家开放五方通话协,设计院设计电梯的消防智能点:迫降与求助功能,电梯控制箱内主要设电梯运行状态、故障报警、上/下运行方向、楼层信息的辅助触点二、客梯要求1、品牌要求(1)外商独资、中外合资均可。
投标设备及所有部件需列明生产品牌及产地2、电梯一般技术要求(一)可行性要求1、要求连续工作每天24小时,全年365天。
LS900-10 产品手册说明书
LS900-10 产品手册匯出日期:2023-11-05修改日期:2023-09-12••关于本手册感谢您购买本公司的机器人产品。
本手册记载了正确安装使用机器人所需注意的事项。
安装使用该机器人系统前,请仔细阅读本手册与其他相关手册。
阅读之后,请妥善保管,以便随时取阅。
禁止擅自复印或转载本手册的部分或全部内容。
本手册记载的内容将来可能会随时变更,恕不事先通告。
如您发现本手册的内容有误或需要改进亦或补充之处,请不吝指正。
除本手册中有明确陈述之外,本手册中的任何内容不应解释为本公司对个人损失、财产损坏或具体适用性等做出的任何担保或保证。
本公司对因使用本手册及其中所述产品而引起的意外或间接伤害不负责。
手册内容本手册包含以下说明:机器人的安装机器人的使用••• 机器人的维护阅读对象本手册面向:安装人员维护人员保修本机器人及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。
(有关保修期事项,请咨询您所在区域的销售人员。
)但在以下情况下,将对客户收取修理费用(即使在保修期内):1. 因不按照手册内容错误的使用以及使用不当而导致的损坏或故障。
2. 客户未经授权进行拆卸导致的故障。
3. 因调整不当或未经授权进行修理而导致的损坏。
4. 因地震、洪水等自然灾害导致的损坏。
警告1. 如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保修无效。
2. 本公司对产品使用而导致的任何故障或事故,甚至是人身伤害或死亡均不承担任何责任。
3. 本公司不可能预见所有可能的危险与后果。
因此,本手册不能警告用户所有可能的危险。
垂询方式有关机器人的修理/检查/调整等事项,请与本公司售后部门联系。
未记载售后部门时,请与当地销售商联系。
为节约您的时间,联系前请事先准备好下述各项:- 控制器名称/序列号- 机器人名称/序列号- 软件名称/版本- 系统出现的问题••••••••••••••••••••••••••••••••••••••••••••••••••1 目录目录安全关于本章安全术语安全标识风险说明安全特性什么是紧急停止使能开关工作中的安全事项概述关注自身安全操作示教器从急停状态恢复手动模式的安全事项自动模式的安全事项紧急情况处理产品概述机器人系统概述机器人负载能力机器人功能及预订用途手臂基本原理以及应用的主要技术机器人本体概述技术规范规格参数性能参数表工作空间机器人工作空间输出法兰电箱规格波纹管规格附加:针对SCARA 防护方案的补充说明安装环境条件现场安装搬运安装电器连接电缆连接接地说明用户配线IO 接线定义功能测试上电前检查上电异常检查检查机器人原点和各轴方向、软极限自动运行测试程序维护关于维护时的安全故障处理•••••••••维护计划检查间隔与检查项目内六角螺钉的紧固同步带的维护三/四轴同步带维护零点关于机械零点零点标定标定步骤••••••••••2 安全2.1 关于本章说明此章说明安全使用机器人需遵守的内容,在使用机器人之前,请务必详读此章内容。
工业机器人技术参数介绍

工业机器人技术参数介绍工业机器人是近年来快速发展起来的一项核心技术,广泛应用于生产制造领域。
机器人的性能参数是评价其技术水平和适用范围的重要指标之一。
本文将介绍工业机器人的技术参数,帮助读者更好地了解和使用工业机器人。
一、轴数工业机器人的轴数是指机器人关节数量,也可以视为机器人可活动的自由度。
常见的工业机器人轴数包括2轴、3轴、4轴、5轴和6轴等。
轴数越多,机器人的灵活性和操作范围越广。
例如,6轴机器人可以实现复杂的空间运动和多角度操作,适用于精密加工和装配等场景。
二、负载能力工业机器人的负载能力是指机器人能够承受的最大负载重量。
根据负载能力的不同,可以将工业机器人分为轻负载、中负载和重负载等不同类型。
负载能力是选择机器人时需要考虑的重要参数之一,根据实际需求选择适合的负载能力可以提高生产效率和产品质量。
三、工作半径工作半径是指工业机器人可工作范围距离机器人中心的距离。
根据工作半径的不同,可以将工业机器人分为小型、中型和大型等不同规格。
工作半径决定了机器人能够覆盖的作业区域大小,足够大的工作半径可以满足大尺寸产品的制造。
四、重复定位精度重复定位精度是指工业机器人在重复操作中能够准确回到指定位置的能力。
通常以毫米或者微米为单位进行衡量。
高重复定位精度可以保证产品加工和装配的一致性和精度。
不同的应用场景对重复定位精度要求不同,根据实际需求选择合适的机器人可以提高生产效率和产品质量。
五、运行速度机器人的运行速度是指机器人执行任务时的移动速度。
根据实际需求,可以调节机器人的运行速度,提高生产效率。
不同类型的工业机器人具有不同的速度范围,选择适合的运行速度可以提高生产效率和灵活性。
六、精度范围精度范围是指工业机器人在执行任务时能够达到的精度范围。
根据不同的应用需求,可以选择适合的精度范围,保证产品的质量和精度要求。
提高精度范围可以实现更高精度的加工和装配,满足高精度产品的要求。
七、编程方式工业机器人的编程方式主要包括在线编程和离线编程两种方式。
工业机器人主要参数及其对性能的影响

工业机器人主要参数及其对性能的影响工业机器人是在制造业领域中被广泛应用的自动化设备,具有高效、精确和可靠等特点。
在选择和使用工业机器人时,关注其主要参数是十分重要的,因为这些参数直接影响着机器人的性能。
本文将深入探讨工业机器人的主要参数以及它们对性能的影响。
一、机器人的负载能力机器人的负载能力是指它能够承受的最大负载重量。
该参数在选择机器人时至关重要,因为不同的应用场景对机器人的负载要求不同。
一般来说,机器人的负载能力越大,它在执行任务时的稳定性和可靠性就会更高。
但是,负载能力过大也会导致机器人的成本增加以及能效降低。
在选择机器人时需要根据实际需求平衡负载能力和成本效益。
二、机器人的工作范围工作范围是指机器人在三维空间内可达到的最大距离。
它由机器人的臂长、关节结构和关节扭矩等参数决定。
工作范围直接决定了机器人能够操作的空间范围,对于不同的任务需求,需要选择适合的工作范围。
较大的工作范围可以覆盖更广泛的区域,适用于大型物体处理和装配,而较小的工作范围则适用于小型物体的精细操作。
在实际应用中,需要综合考虑工作范围和机器人的运动灵活性。
三、机器人的重复定位精度重复定位精度是指机器人在多次执行相同任务时,能够重现相同位置的能力。
这个参数对于需要精确定位和重复性高的任务非常重要。
对于装配任务,重复定位精度直接关系到产品的精度和质量。
机器人的重复定位精度受到多方面因素的影响,包括机器人结构、传感器的精度和变形校正等。
在实际应用中,需要根据具体需求选择具有较高重复定位精度的机器人。
四、机器人的速度和加速度机器人的速度和加速度是决定其执行任务效率和响应速度的重要参数。
速度参数通常用线速度表示,加速度参数则描述了机器人在不同速度下的加速和减速能力。
较高的速度和加速度可以提高生产效率,缩短任务执行时间。
然而,过高的速度和加速度可能导致机器人振动和稳定性问题。
在选择机器人时需要根据任务需求以及工作环境的安全性和稳定性综合考虑速度和加速度参数。
工业机器人的技术参数
上操作台、 辅助提升机、 台架、 空中吊运机、 主提升
机、 燃料夹持器等组成的; 采用了计算机控制方式, 可 依据操作人员的运转指令, 完成自动运转、 半自动运转 和手动运转模式下的燃料交换。 是: ① 可以在远距离的操作室中全自动运转; ② 精密
的多重圆筒立柱可提高定位精度; ③ 利用计算机可以控
离线示教编程及工作站系统动态仿真; 电子行业用装
配机器人产品标准化、通用化、模块化、系列化设计; 批量生产机器人所需的专用制造、装配、测试设备和 工具的研究开发。
2) 智能机器人开发研究 这些研究主要包括: 遥控加局部自主系统构成和
控制策略研究;智能移动机器人的导航和定位技术研
究; 面向遥控机器人的虚拟现实系统;人机交互环境 建模系统; 基于计算机屏幕的多机器人遥控技术。 3) 机器人化机械研究开发 这些研究开发主要包括: 并联机构机床(VMT)与 机器人化加工中心(RMC)开发研究; 机器人化无人值 守和具有自适应能力的多机遥控操作的大型散料输送
《工业机器人技术》
授课指导:谢光辉
2015年09月
博士/副教授
前言
⊕ ⊕
定义:机器人(Robot)是一种可编程和多功能的, 用来搬运材料、零件、工具的操作机;或是为了执行不 同的任务而具有可改变和可编程动作的专门系统 。 任务:协助或取代人类工作的工作,例如生产业、 建筑业,或是危险的工作。目前在工业、医学、农业、 建筑业甚至军事等领域中均有重要用途。
台Unimate 机器人, 如图1.11所示。
这是一台用于压铸作业的五轴液压驱动机器人 , 手 臂的控制由一台专用计算机完成。它采用分离式固体数
控元件, 并装有存储信息的磁鼓, 能够记忆完成180个工
作步骤。与此同时, 另一家美国公司——AMF公司也开 始研制工业机器人, 即Versatran(Versatile Transfer)机器人,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 弧焊用途相关参数 • FD006 参数为独立运动控制功能(4系列或者8系列)参 数值设定为1时为4系列,参数值设定为2时为8系;FD007 参数为独立运动控制协调轴组控制(为1时正常【协调键 4】,为2时协调命令转换用[转换+4键]), • PSTART JOB:R1JOB SUB1 • PSTART JOB:R2JOB SUB2 • . • . • PSTART JOB:R7JOB SUB7 • PWAIT SUB1 • PWAIT SUB2 • . • . • PWAIT SUB7 机器人程序类型R1JOB只能为不带外部轴的轴组.
机器人机器部参数(续)
• 【AMCxG参数】为配置系统机器人的动作控制参数(x可 以是数字1或2或3或4等); • 【MFxG参数】为定义机器人运动功能参数(x可以是数字1 或2或3或4等); • 【SVD参数】为定义机器人 • 【SVSxB参数】为配置系统机器人的伺服包参数(x可以是 数字1或2或3或4等);
机器人参数应用详解
• FD018参数为机器人R1/2要带外部轴的轴组同步协调机能, 参数值0为无效,1为有效. 机器人程序R1S1的控制轴组形 式为R1+S1:S1,机器人程序R2S1的控制轴组形式为R2+ S1:S1. • PSTART JOB:R1S1 SUB1 SYNC SUB2 • PSTART JOB:R2S1 SUB2 • PWAIT SUB1 • PWAIT SUB2 • FD022参数为机器人R1/2要带外部轴的轴组同步协调机能 是否完全同步 , 参数值 0 为不完全同步, 1 为完全同步。当 设置成完全同步时,有时会对焊接成型不好(根据焊接工 艺是否要完全同步,完全同步与不完全同步相比,完全同 步增加机器人的运行节拍)。 • 在运行程序时,如果程序不运行,得先把多程序操作模式 设置成有效【转换+4】来回切换多程序操作模式或者单一 程序操作模式. S4C152 参数为用户设定通用输出号码 (1~1024,其中0为不使用)。当在示教模式时,设定多 程序操作模式有效后,设定的通用输出为ON。
• • • • • • • • • • • • • • • • • • • • • • • • • •
///GROUP1 RB1 ///GROUP2 ST1 NOP MOVJ C00000 VJ=40.00 +MOVJ EC00000 MOVJ C00001 VJ=40.00 +MOVJ EC00001 TSYNC 1 MOVJ C00002 VJ=40.00 +MOVJ EC00002 MOVL C00003 V=333.3 +MOVJ EC00003 TSYNC 2 ARCON AC=200 AV=23.0 RETRY REPLAY ARCCTS AC=205 AV=24.0 DIS=3.0 MOVL C00004 V=10.0 +MOVJ EC00004 MOVL C00005 V=10.0 +MOVJ EC00005 MOVL C00006 V=10.0 +MOVJ EC00006 ARCOF AC=190 AV=21.0 T=0.30 MOVJ C00007 VJ=30.00 +MOVJ EC00007 VJ=30.00 MOVL C00008 V=166.7 +MOVJ EC00008 VJ=30.00 ARCON AC=200 AV=22.5 TIMER T=0.30 ARCOF MOVJ C00009 VJ=40.00 +MOVJ EC00009 TSYNC 3 MOVJ C00010 VJ=40.00 +MOVJ EC00010 TSYNC 4 MOVJ C00011 VJ=40.00 +MOVJ EC00011 MOVC C00012 V=333.3 +MOVJ EC00012
机器人机器部参数
• 【机器部参数】有: • 【SVCxB参数】作用为定义机器人【整流器】 参数(x可以是数字1或2或3或4等); • 【RCxG参数】其为定义系统【机器人机种类型】 参数 (x可以是数字1或2或3或4等) • 【ROxG参数】其为定义系统【机器人坐标原点】 参数 (x可以是数字1或2或3或4等); • 【SVxG参数】其为配置系统机器人的伺服参数 (x可以是数字1或2或3或4等); • 【SVMxG参数】为配置系统机器人的【伺服电 机】参数(x可以是数字1或2或3或4等); • 【SVPxG参数】为配置系统机器人的伺服功率模 块参数(x可以是数字1或2或3或4等); • 【S1CxG参数】为配置系统机器人的匹配参数(x 可以是数字1或2或3或4等);
Nx100机器人控制系统
参数的讲座
首钢莫托遇机器人有限公司 技术中心
1.机器人参数的分配
• 机器人参数主分成两大部分:【机器人共通部分】和【机器部参 数】. • 【机器人共通部分】有: • 【FD参数】 其主要作用为定义机器人机能用途参数; • 【SxD参数】其主要作用为定义系统参数 (x可以是数字1或2或 3或4); • 【S2C参数】其主要作用为配置系统参数(机器人相关操作) ; • 【S3C参数】其主要作用为配置系统参数(机器人干涉区相关参 数) ; • 【 S4C参数 】其主要作用为配置系统参数(机器人输入输出 部) ; • 【RS参数】其主要作用为系统传输用途参数 ; • 【CIO参数】其主要作用为配置机器人输入输出 ; • 【RCD参数】其主要作用为机器人匹配定义参数; • 【AxP参数】为机器人应用用途参数(x可以是数字1或2或3或4); • 【SxE参数】为机器人应用用途参数(x可以是数字1或2或3或4)
• • • • • • • • • • • • • • • //GROUP1 RB2 ///GROUP2 ST1 NOP MOVJ C00000 VJ=40.00 +MOVJ EC00000 MOVJ C00001 VJ=40.00 +MOVJ EC00001 TSYNC 1 MOVJ C00002 VJ=40.00 +MOVJ EC00002 MOVL C00003 V=333.3 +MOVJ EC00003 TSYNC 2 ARCON AC=200 AV=23.0 RETRY REPLAY ARCCTS AC=205 AV=24.0 DIS=3.0 MOVL C00004 V=10.0 +MOVJ EC00004 MOVL C00005 V=10.0 +MOVJ EC00005 MOVL C00006 V=10.0 +MOVJ EC00006 ARCOF AC=190 AV=21.0 T=0.30 MOVJ C00007 VJ=30.00 +MOVJ EC00007 VJ=30.00 MOVL C00008 V=166.7 +MOVJ EC00008 VJ=30.00 ARCON AC=200 AV=22.5 TIMER T=0.30 ARCOF MOVJ C00009 VJ=40.00 +MOVJ EC00009 TSYNC 3 MOVJ C00010 VJ=40.00 +MOVJ EC00010 TSYNC 4 MOVJ C00011 VJ=40.00 +MOVJ EC00011 MOVC C00012 V=333.3 +MOVJ EC00012 TSYNC 5