电流控制技术和斜坡补偿
峰值电流控制模式中斜坡补偿的分析
峰值电流控制模式中斜坡补偿的分析
电流控制模式的斜坡补偿是一种重要的电力系统电流控制策略。
其主要目的是在瞬时负载变化的情况下,在预定的稳定时间内将负载的瞬时变化转换为一个平滑的频率变化,从而稳定系统电流。
斜坡补偿的任务实际上是确定合适的斜坡值,以确保系统电流在预定的时间内达到稳定状态,使系统峰值电流控制变得更加有效。
斜坡补偿对峰值电流控制的重要性可以从两个方面划分:
1. 斜坡补偿可以有效地减少系统电流的瞬时峰值,从而减少过载。
当控制斜坡来减少有载负载的瞬时电流峰值时,这种技术将大大有助于防止过载严重影响电力系统的安全和可靠性。
2. 斜坡补偿可以有效地减少发电机之间的不对称负载,从而消除失控和谐波等其他问题,从而维持电力系统的正常运行。
另外,使用斜坡补偿的另一个优点是可以减少静态补偿器的成本和复杂度,而静态补偿器的成本大大超出了它所带来的控制有效性和额外的谐波抑制能力。
因此,斜坡补偿是电力系统峰值电流控制的一个重要组成部分,可以有效地消除系统的过载、失控及其他负载问题。
峰值电流模控制中的斜坡补偿技术
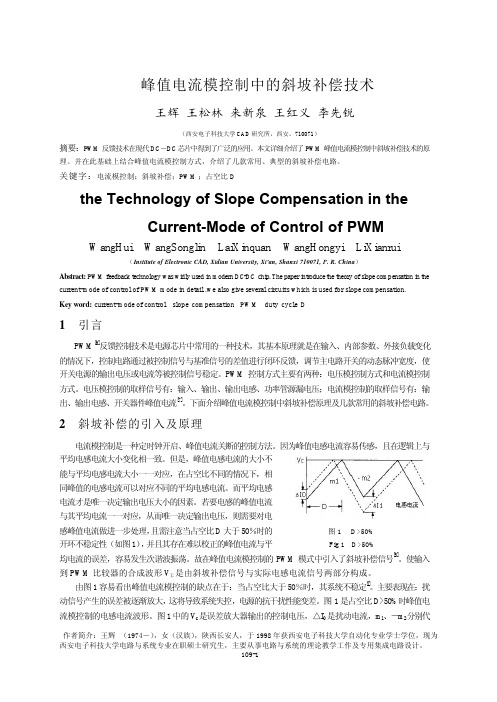
图 4 n 阶线性斜坡产生原理图 Fig 4 Functional Diagram for N Rank Linear Slope Generator
空比的增大, 斜率补偿信号的幅度也会增大, 图 5 三阶线性斜坡
Fig 5 3 Rank Linear Slope
109-3
时序图可以看到,斜坡的产生与外部时钟 同步,并随其改变[3] [4]。 3. 5 非线性斜坡产生电路 以上的几种斜坡均是由振荡器先产生 一个三角锯齿波,然后再经过电路处理而 得出补偿信号。这样所波由功率管的控制信号产生,并且其 与经过电路网络处理后的电感电流做比较
图3 线性斜坡产生电路 Fig 3 the Linear Slope Generator Circuit
109-2
坡信号加在三个晶体管的基极,随着斜坡幅 值的增加,Q1、Q2、Q3、依次导通,从而形 成三阶线性斜波(如图 5 所示)islope [3]。 3.3 带箝位的斜坡补偿电路 加斜率补偿后随着占空比的增大,实际 的电感电流峰值被降低了。这是因为随着占 从而导致峰值电流门限在主开关导通的后期 显著下降。当占空比达到 90%时,补偿信号 将电感峰值电流减小了 30%。解决途径之一 便是当发生斜坡补偿时提高控制门限电平。 但是仅仅提高门限并不是个可靠的办法,一 是误差放大器输出的控制信号会经过一个 RC 滤波网络再反馈到 PWM 比较器中,该 滤波网络的时常数一般都很大,那么门限控 制电平将无法跟上补偿斜坡的快速变化。二 是单纯的提高门限则会将斜坡补偿化为乌 有。但是,若在斜坡部分加一个箝位电路, 该箝位电路的箝位电压可以根据斜坡信号的幅度加以调 节, 进而保证在大占空比下电感峰值电流实质上不变 (如 图 6 示) 。 并且斜坡补偿信号的引入使得箝位电路的箝位 阈值随着斜坡补偿信号幅度的增减而增减,最后将其经 过处理的斜坡补偿信号箝位在 V1 和 V2 上经 ERR4 输出。 3. 4 可外同步的斜坡补偿电路 以上的斜坡产生电路均是内同步的,但在有些通信 系统应用中,系统同步是很重要的,整个系统需要在统 一的时钟下同步运行,因此需要斜坡补偿部分随外部电 路时钟进行变化。如图 7 所示可外同步的斜坡补偿电路 框图。下面介绍一下该电路中的各模块功能: 时钟检测及脉冲触发电路:检测到有时钟输入时, 将计数器预置一个数,并在每个周期内产生一个脉冲。 窗口比较器: 限定三角波的峰值在 Vref1<V<Vref2 之间。 电容 C1 :在 φ A 控制下充放电产生三角波。 计数器:外部时钟变化或三角波峰值电压 V 不在 Vref1 和 Vref2 时,触发其进行计数。当 V 低于 Vref1 时上计数,每 计一个数则打开一个电流源, 加大对 C1 的充电电流以提高 斜坡峰值; 当 V 高于 Vref2 时, 在外时钟同步下进行下计数, 每减一个数则关闭一个电流源,降低下一个时钟周期的三角波峰值;当 Vref1<V<Vref2 时,逻辑控制模块将计 数时钟屏蔽,则打开固定的电流源,此时斜坡峰值将不再变化。其整个工作过程的大概波形如图 8 所示。由
峰值电流控制中的斜坡补偿研究
本科毕业设计(论文)峰值电流控制中的斜坡补偿研究***燕山大学2012年 6 月本科毕业设计(论文)峰值电流控制中的斜坡补偿研究学院(系):***专业:08级应用电子学生姓名:***学号:***指导教师:***答辩日期:2012年6月17日燕山大学毕业设计(论文)任务书摘要摘要相比传统的线性电源,DC-DC开关电源由于具有高效率、高可靠性、体积小等优点,使其成为国内外研究的热点。
电流模式DC-DC开关电源具有响应速度快、稳定性高、内在限流保护等特点在电源管理芯片中得到了广泛的运用。
在这一背景下,本文以Boost变换器为例,设计峰值电流控制的斜坡补偿电路;输入电压48V,输出电压200V。
本文主要研究电流模式DC-DC开关电源中斜坡补偿理论,分析了电感电流扰动导致控制环路产生不稳定的原因,给出抑制这种不稳定因素的处理办法即斜坡补偿方法。
针对此问题提出斜坡补偿设计思想,在此理论基础上完成了相应的斜坡补偿控制电路路设计。
本文中完成了DC-DC开关电源系统的各个单元电路设计与分析,重点分析斜坡补偿控制电路的设计。
最后采用MATLAB软件进行仿真。
通过整体仿真,实现稳定电压,系统具有良好的负载调整特性和快速的稳态恢复时间和优良的电源调整率。
关键词开关电源,峰值电流模式,斜坡补偿AbstractAbstractThe switch power possesses the advantages of high efficiency, high reliability and compact size compared with conventional linear power which becomes a pop research object home and abroad. Due to its characteristics of fast response, good stability, inherent current limiting, current-mode controller has been widely applied in power management circuits. In this background, this paper to Boost converter as an example, the design of peak current control slope compensation circuit; the input voltage 48V, output voltage 200V.This paper mainly studies the current mode switching power supply DC-DC slope compensation in theory, analysis of inductor current disturbance causes the control loop to generate unstable reason given, inhibition of the unstable factors approach that slope compensation method. The slope compensation design, on the basis of the theory to accomplish the corresponding slope compensation control circuit design. This paper completed the DC-DC switching power supply system each unit circuit design and analysis, focusing on the analysis of the slope compensation control circuit design. Finally using the MATLAB software simulation. Through the simulation, to achieve stable voltage, the system has a good load regulation characteristics and rapid steady state recovery time and excellent power adjustment rate.Keywords Switch power supply, peak current mode, slope compensation目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题背景 (1)1.2开关电源的发展阶段 (2)1.3开关电源的发展趋势 (4)1.4论文的主要内容和设计目标 (4)1.5本章小结 (5)第2章电流峰值控制 (6)2.1开关电源基础知识 (6)2.2升压型(BOOST)变换器电路 (7)2.2.1工作原理和工作过程 (7)2.2.2稳态波形和主要参数计算 (8)2.3电流峰值控制 (11)2.3.1 电流峰值控制的概念 (13)2.3.2 电流控制的稳定性问题 (15)2.4本章小结 (20)第3章斜坡补偿电路设计 (21)3.1锯齿波补偿稳定电流控制的稳定性分析 (21)3.2常见的几种斜坡产生电路 (25)3.2.1线性斜坡 (25)3.2.2 n阶线性斜坡 (27)3.2.3带箝位的斜坡补偿电路 (31)3.2.4可外同步的斜坡补偿电路 (32)3.2.5非线性斜坡产生电路 (32)3.2.6总结这几种斜坡补偿电路 (33)3.3本章小结 (34)第4章仿真结果 (35)4.1仿真 (35)4.2本章小结 (40)结论 (41)参考文献 (42)致谢 (43)附录1 (44)附录2 (47)附录3 (50)附录4 (54)附录5 (60)第1章绪论第1章绪论1.1 课题背景随着电子技术的飞速发展和不断创新,电子电力设备与人们工作和生活的关系日益密切,其性能的优劣直接关系到电子设备的技术指标及能否安全可靠地工作,由此也带来了电源管理技术的腾飞。
电流型变换器工作原理和斜坡补偿

图5UC1846采用不同斜坡补偿方法的电路原理图
(a)斜坡补偿信号和电流检测信号相加
(b)斜坡补偿信号直接和误差信号相加
——开关频率固定(这种情况下R1/R2固定),并且误差放大器增益固定;
——计算所需斜坡补偿量时要把电压误差放大器,电流误差放大器的增益都考虑进去。在任何一种情况下TRS(VO/L)(4)
从而保证变换器的占空比大于50%时变换器能稳定工作。
2.2次谐波振荡
对电流型控制而言,内环电流环峰值增益是个很重要的问题,这个峰值增益在开环频率一半的地方,由于调制器的相移可能在电压反馈环开关频率一半的地方产生振荡,这种不稳定性叫做次谐波振荡。
3峰值电流检测与平均电流检测
5UC1846的斜坡补偿
UC1846是一种采用斜坡补偿的电流型集成控制芯片,它具有恒频PWM电流型控制所需的控制电路和相关电路。图5(a)和图5(b)表示采用UC1846实施斜坡补偿的两种电路原理图。在第4脚的电流检测信号和斜坡补偿信号直接相加很容易实现,但这又在电流检测电路中引入了误差。另一种方法就是把这个斜坡补偿加至误差放大器的反相输入端,采用这种方法的前提条件是:
2峰值电流型控制存在的问题
下面主要讨论峰值电流型控制存在的问题及利用斜坡补偿克服所存在问题的方法,并给出斜坡补偿的实施方案。
2.1开环不稳定性
在不考虑外环电压环的情况下,当恒频电流型变换器的占空比大于50%时,就存在内环电流环工作不稳定的问题。然而有些变换器(如双管正激变换器)它本身工作的脉冲占空比就不能大于50%,因此不存在问题。而有些变换器的脉冲占空比不大于50%时,它的输入将会受到许多限制,如果在内环加一个斜坡补偿信号,则变换器可以在任何脉冲占空比情况下正常工作。下面介绍斜坡补偿工作原理。
斜坡补偿技术
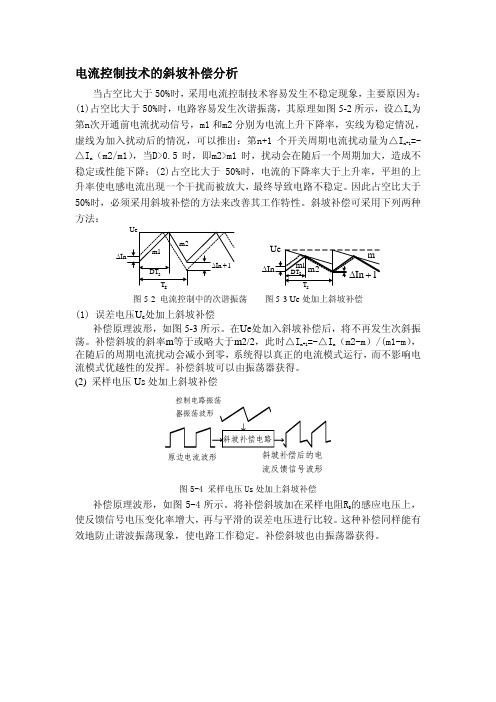
电流控制技术的斜坡补偿分析当占空比大于50%时,采用电流控制技术容易发生不稳定现象,主要原因为:(1)占空比大于50%时,电路容易发生次谐振荡,其原理如图5-2所示,设△I n 为第n次开通前电流扰动信号,m1和m2分别为电流上升下降率,实线为稳定情况,虚线为加入扰动后的情况,可以推出:第n+1个开关周期电流扰动量为△I n+1=-△I n (m2/m1),当D>0.5时,即m2>m1时,扰动会在随后一个周期加大,造成不稳定或性能下降;(2)占空比大于50%时,电流的下降率大于上升率,平坦的上升率使电感电流出现一个干扰而被放大,最终导致电路不稳定。
因此占空比大于50%时,必须采用斜坡补偿的方法来改善其工作特性。
斜坡补偿可采用下列两种方法:ΔΔ图5-2 电流控制中的次谐振荡 图5-3 Ue 处加上斜坡补偿(1) 误差电压U e 处加上斜坡补偿补偿原理波形,如图5-3所示。
在Ue 处加入斜坡补偿后,将不再发生次斜振荡。
补偿斜坡的斜率m 等于或略大于m2/2,此时△I n+1=-△I n (m2-m)/(m1-m),在随后的周期电流扰动会减小到零,系统得以真正的电流模式运行,而不影响电流模式优越性的发挥。
补偿斜坡可以由振荡器获得。
(2) 采样电压Us 处加上斜坡补偿斜坡补偿电路器振荡波形控制电路振荡原边电流波形流反馈信号波形斜坡补偿后的电图5-4 采样电压Us 处加上斜坡补偿补偿原理波形,如图5-4所示。
将补偿斜坡加在采样电阻R S 的感应电压上,使反馈信号电压变化率增大,再与平滑的误差电压进行比较。
这种补偿同样能有效地防止谐波振荡现象,使电路工作稳定。
补偿斜坡也由振荡器获得。
峰值电流控制斜坡补偿
峰值电流控制斜坡补偿
分峰值电流控制斜坡补偿技术是一种采用智能控制的电动机控制技术,它可以大大减
少电动机的功率消耗,延长电动机的使用寿命,提升效率,同时它有效地节省了磁通电流,从而降低了整个系统的能耗。
分峰值电流控制斜坡补偿技术是在紧凑型母线或多路母线模式下实现的,其原理是通
过智能控制,在主驱动芯片发出控制信号之前,会自动进行控制斜坡补偿,使电动机控制
电流从零开始,保证电动机的启动,同时避免电动机的绝缘和热点损坏。
同时它还有助于
减少电机的启动电流,降低电动机的噪声,以及改善功率因数等方面的性能。
分峰值电流控制斜坡补偿技术的另一个优点在于它可以帮助降低电流的功率消耗,因
而减少工作效率的损失。
由于这种技术可以从系统电流上进行补偿,可以有效减少功率消耗,从而节省能源。
此外,它还能有效改善系统的延时特性和动态响应特性,从而提高系
统的运行效能。
分峰值电流控制斜坡补偿的另一个优点是它可以同时监测和控制电动机的内部状态和
外部电流。
它能根据电动机的不同状态将补偿调整到合适的水平,从而更好地改善电流和
电动机的工作。
此外,它还可以检测电机内部的热点,在发生堵转现象时进行抢修,避免
有害电流流出,从而提高电机的安全性能。
总之,分峰值电流控制斜坡补偿技术能够有效降低系统能耗,提高效率,延长电机的
寿命,改善功率因数,优化系统的延时特性和动态响应特性,同时检测、控制电机的内外
部电流,确保电机达到良好的运行效果,提高安全性。
buck电流模式 斜坡补偿 电路

buck电流模式斜坡补偿电路下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!了解Buck电流模式斜坡补偿电路在电源电路设计中,Buck转换器是一种常见的降压型电路,用于将输入电压降低到所需的输出电压。
电流控制技术和斜坡补偿
三、斜坡补偿的引入
斜坡补偿原理: 鉴于以下原因, 峰值电流控制必须考虑采用斜坡补偿。 1 电路的稳定性 图 2、图 3 分别是占空比大于 50% 和小于 50%的尖峰电流控制的电感电流波形图。其中 Ve 是电压放大器输出的电流设定值,?Io 是扰动电流, m1、m2 分别是电感电流的上升沿及下
降沿斜率。 由图可知, 当占空比小于 50%时扰动电流引起的电流误差 ? I 1 变小了, 而占空比大于 50%时扰动电流引起的电流误差 ? I 1 变大了。所以尖峰电流模式控制在占空比大于 50%时, 经 过一个周期会将扰动信号扩大, 从而造成工作不稳定, 这时需给PWM比较器加坡度补偿以稳 定电路, 如图 4 所示。加了坡度补偿, 即使占空比小于 50%,电路性能也能得到改善。
固定补偿网络, 很多时候会发生过补偿或欠补偿, 降低了电路的性能并导致波形畸变, 因此, Boost 电路通常不采用峰值电流控制而是采用平均电流控制的模式,来避免斜坡补偿。 2.减小尖峰值/平均值误差 电流模式控制的实质是使平均电感电流跟随误差电压 V e 设定的值, 即可用一个恒流源来 代替电感, 使整个系统由二阶降为一阶。但如图 6 所示, 尖峰电流控制模式中随着占空比D1、 D2 的不同, 电感电流的平均值 I1、 I2 亦不同。 如图 7 示, 可以通过斜坡补偿来获得不同占空比 下一致的电感电流。
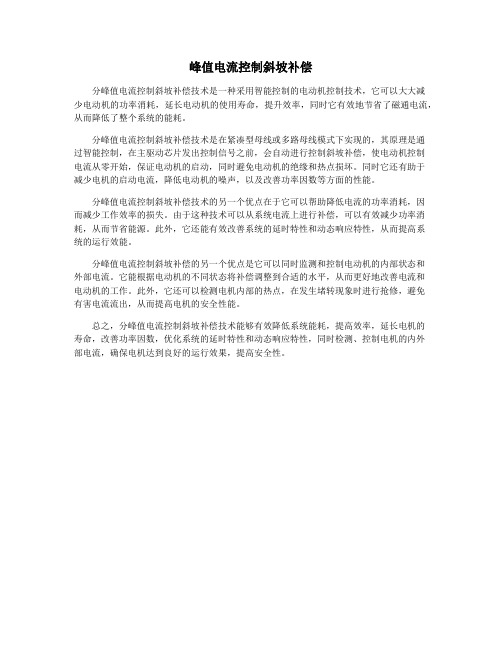
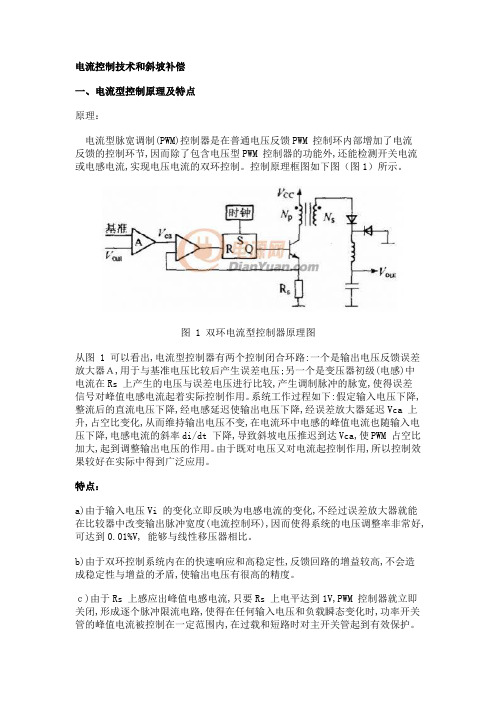
图 1 双环电流型控制器原理图
从图 1 可以看出, 电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A, 用于 与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在 Rs 上产生的电压与误 差电压进行比较, 产生调制脉冲的脉宽, 使得误差信号对峰值电感电流起着实际控制作用。系 统工作过程如下 :假定输入电压下降, 整流后的直流电压下降, 经电感延迟使输出电压下降, 经 误差放大器延迟 Vca 上升, 占空比变化, 从而维持输出电压不变, 在电流环中电感的峰值电流也 随输入电压下降, 电感电流的斜率 di/dt 下降, 导致斜坡电压推迟到达 Vca, 使 PWM 占空比加大, 起到调整输出电压的作用。 由于既对电压又对电流起控制作用, 所以控制效果较好在实际中得 到广泛应用。 特点: a) 由于输入电压 Vi 的变化立即反映为电感电流的变化, 不经过误差放大器就能在比较器中改 变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好, 可达到 0.01%V, 能够与线性 移压器相比。 b)由于双环控制系统内在的快速响应和高稳定性, 反馈回路的增益较高, 不会造成稳定性与增 益的矛盾, 使输出电压有很高的精度。 c)由于 Rs 上感应出峰值电感电流, 只要 Rs 上电平达到 1V,PWM 控制器就立即关闭, 形成逐个 脉冲限流电路, 使得在任何输入电压和负载瞬态变化时, 功率开关管的峰值电流被控制在一定 范围内, 在过载和短路时对主开关管起到有效保护。 d)误差放大器用于控制, 由于负载变化造成的输出电压变化, 使得当负载减小时电压升高的幅 度大大减小, 明显改善了负载调整率。 e) 由于系统的内环是一个良好的受控电流放大器, 所以把电流取样信号转变成的电压信号和 一个公共电压误差放大器的输出信号相比较, 就可以实现并联均流, 因而系统并联较易实现。
电流型PWM控制斜波补偿原理与系统的稳定
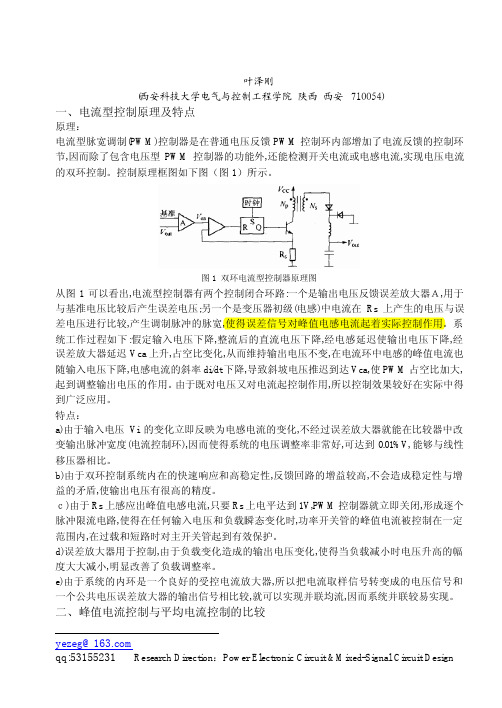
斜波补偿原理与系统的稳定电流型PWM控制系统的电流斜率补偿对于理想的系统,分析比较容易,但实际上,电解电容的ESR和开关管的最小死区,都会影响系统的稳定性。
电流内环的控制过程及电流斜坡如图1所示。
图中,m1为开关管导通期间电感电流iL上升率的等效折算值,m2为开关管关断期间电感电流iL下降率的等效折算值,他们又下式给出:m1=Vs/Tm2=VoR/LMN (1.1)图1所画的是稳定工作的情况下,当负载或输入电压变化时都会造成电流的变化。
当产生扰动时,系统能否稳定工作取决于其对扰动的相应是否收敛的。
电流型控制系统的收敛分两种情况,即δ<0.5和δ>0.5。
在这两种情况下,系统接受扰动时的稳定性表现是不一样的,见图2。
图2.a,当δ<0.5时,如果有一个扰动Δi,经过一个周期后产生的电感电流变化量为ΔiL<Δi,这一点可以用解析几何的方法来进行证明,所以系统是收敛的,也就是稳定的.图2.b,当时δ>0.5,扰动Δi,经过一个周期后产生的电感电流变化量为ΔiL>Δi,很显然,这是系统是发散的,也就是不稳定的,并且δ越大,系统也就越不稳定。
为了解决δ>0.5时系统不稳定的问题,我们可以对电感电流Δi上升的斜率进行补偿,也就是加大等效的m1,实际上也就是人为地减小占空比δ,使其等效成δ<0.5时的稳定的情况。
增加Δi也就是增加Vs(最大Ton对应的电压值),实际上和减小Vc是等效的。
所以在分析补偿作用的时,我们来看减小Vc的情况。
但是在实际应用过程中,增加Vs和减小Vc都是可以的,有时增加Vs反而比减小Vc更方便。
减小Vc进行补偿的情况见图3所示。
图中,-m为减小Vc的斜率。
用解析几何的方法可以求出:ΔiL=-Δi(m+m2)/(m+m1) (1.2)由于δ越大,系统越不稳定,需要补偿的幅度也就越大,所以我们要考虑δ≈1时的情况。
当m1≈0时,即稳态时的iL≈TL,基本不变。
pfc峰值电流控制斜坡补偿

pfc峰值电流控制斜坡补偿PFC(Power Factor Correction,功率因数校正)技术是一种用于改善电力系统功率因数的技术。
在电力系统中,功率因数是指有功功率与视在功率之间的比值,是衡量电流和电压之间相位关系的一个重要参数。
功率因数越接近1,说明电流和电压之间的相位差越小,电力系统的效率越高。
峰值电流控制斜坡补偿(Peak Current Control with Slope Compensation,简称PCCSC)是一种用于PFC控制的技术。
通过控制斜坡补偿电流,可以实现对峰值电流的精确控制,从而提高PFC的效率和稳定性。
在传统的PFC控制中,采用的是电流模式控制(Current Mode Control,简称CMC)。
CMC通过比较参考电流和实际电流,产生一个误差信号,然后根据误差信号控制开关管的导通时间,从而实现对电流的控制。
然而,CMC存在一个问题,即在电流模式控制下,当输入电压或负载发生变化时,峰值电流也会发生变化,从而导致系统的稳定性受到影响。
为了解决这个问题,PCCSC技术应运而生。
PCCSC技术在传统的CMC控制上增加了斜坡补偿电流的控制。
斜坡补偿电流是一个与输入电压或负载变化成正比的补偿电流,通过控制斜坡补偿电流的大小和斜率,可以实现对峰值电流的精确控制。
具体而言,PCCSC技术通过比较参考电流和实际电流,产生一个误差信号。
然后,根据误差信号控制开关管的导通时间,并根据斜坡补偿电流的控制策略,调整斜坡补偿电流的大小和斜率。
当输入电压或负载发生变化时,斜坡补偿电流会相应地调整,从而实现对峰值电流的控制。
PCCSC技术的优点是可以提高PFC系统的稳定性和响应速度。
由于斜坡补偿电流的控制,PFC系统能够更快地对输入电压或负载的变化做出响应,并能够在变化过程中保持峰值电流的稳定性。
此外,PCCSC技术还可以减小电流谐波含量,提高功率因数。
然而,PCCSC技术也存在一些问题。
峰值电流模式斜坡补偿

峰值电流模式斜坡补偿哎,今天咱们聊聊一个听上去有点复杂的东西,名字也挺高大上的——峰值电流模式斜坡补偿。
别被这些专业术语吓到,其实它就是电源设计中的一个小窍门,能让咱们的电器在高负载的时候更稳当、更给力。
想想吧,电器就像人,有时候需要一点儿“心理安慰”,才能更好地发挥。
就拿咱们平时用的电源来说,如果没了这个斜坡补偿,电流的波动可就大了,可能会导致设备不稳定,就像是开车遇到坑洼的路,颠得你脑袋晕。
想象一下,有一天你在厨房里忙活,突然电饭煲和微波炉一起开了,那可真是个“热闹”的场面。
电流瞬间上升,设备可能会因为过载而停机。
这时候,峰值电流模式斜坡补偿就像个贴心的朋友,默默在后面给你加油,让电流上升得慢一点,给电器一点时间,别让它们一下子就“上火”。
这就好比你在爬山,突然碰上个陡坡,得喘口气再继续往上走,才不会摔个大跟头。
啥是斜坡补偿呢?这简单来说,就是给电流一个缓冲时间,让它逐渐上升,而不是一下子就冲到最高。
这么做的好处可多着呢,能让电源的响应更平稳,避免电流的剧烈波动。
别忘了,电流在运行过程中,如果瞬间变化太大,设备可受不了,可能会出现故障,甚至烧掉。
所以,斜坡补偿的设计就显得尤为重要。
咱们再说说,这个斜坡补偿是怎么实现的。
简单来说,设计师会在电源控制电路里加入一些聪明的“调节器”。
这些小家伙就像是电流的“调音师”,可以根据电流的状态,智能调整电压,让电流上升得慢一点。
就像调音师在演出前调试乐器,确保每一个音符都能和谐响起。
你能想象,要是没有这些“调音师”,那场演出可就乱成一锅粥,观众们可能早就打瞌睡了。
斜坡补偿不仅仅是为了防止设备受伤害,更是为了延长它们的使用寿命。
你看,设备一旦遭遇过大的冲击,元器件的损耗速度就会加快,长期以往,那就不是几百块的问题了,可能几千块都得砸下去。
斜坡补偿就像是个保护罩,让电器在工作的时候感觉舒适,从而工作更持久。
就像人一样,工作累了也得休息休息,才能保持最佳状态。
这种技术还可以提高系统的稳定性。
斜坡补偿到的来龙去脉与实例

斜坡补偿到的来龙去脉与实例斜坡补偿的引⼊ 鉴于以下原因,峰值电流控制必须考虑采⽤斜坡补偿。
当电流模式控制变换器的占空⽐超过50%的时候,变换器会在开关频率的次谐波频率点出现振荡,准确地说是在⼀半开关频率的地⽅,除⾮采取斜坡补偿措施。
斜坡补偿的定义:在电流模式控制下,当电流达到⼀定⼤⼩时(由误差放⼤器输出设定)开关关断。
如果占空⽐超过50%,电感电流的上升时间就⼤于整个周期的50%,那么电流下降时间就⼩于⼀个周期的50%’。
在较短的时间内,电流还没有来得及回到静态初始值,下⼀个周期接着⼜开始了。
下⼀个周期的初始电流变⼤了。
在接下来的这个周期⾥,电感电流很快就上升到参考点,使导通时间变短,占空⽐变得更窄;和上⼀个周期相⽐,这个周期的占空⽐减⼩到50%以内。
但是这样⼜导致关断时间太长,下⼀个周期电流的初始值太⼩,⼜使得占空⽐再⼀次超过50%。
如此循环,电流以间隔⼀个周期过⼤和过⼩的⽅式出现振荡。
1 电路的稳定性 图 2、图3 分别是占空⽐⼤于50%和⼩于50%的尖峰电流控制的电感电流波形图。
其中Ve 是电压放⼤器输出的电流设定值,?Io 是扰动电流,m1、m2 分别是电感电流的上升沿及下降沿斜率。
由图可知,当占空⽐⼩于50%时扰动电流引起的电流误差?I1 变⼩了,⽽占空⽐⼤于50%时扰动电流引起的电流误差? I1 变⼤了。
所以尖峰电流模式控制在占空⽐⼤于50%时,经过⼀个周期会将扰动信号扩⼤,从⽽造成⼯作不稳定,这时需给PWM⽐较器加坡度补偿以稳定电路,如图4 所⽰。
加了坡度补偿,即使占空⽐⼩于50%,电路性能也能得到改善。
图5 m=m2 时,电感电流波形 对于 BUCK 电路,补偿坡度是V0/L,由于输⼊电压恒定,所以补偿值便于计算并恒定;对于Boost 电路,补偿坡度是(Vin-Vo)/L,由于输⼊电压随电⽹变化,所以补偿值不恒定,这样对于固定补偿⽹络,很多时候会发⽣过补偿或⽋补偿,降低了电路的性能并导致波形畸变,因此,Boost 电路通常不采⽤峰值电流控制⽽是采⽤平均电流控制的模式,来避免斜坡补偿。
电流型控制模式的斜坡补偿
电流型控制模式的斜坡补偿杨仕伟【摘要】在传统的电压形式的调控之下, PWM控制器又新添了一个电流反馈环路,该种控制器是由电流模式控制的,添加了新的东西以后动能性明显有了很大的提高,这种模式,已经成为PWM 控制器的首先款式。
【期刊名称】《电子制作》【年(卷),期】2014(000)022【总页数】1页(P1-1)【关键词】电流模式控制;PWM控制器;电流反馈环路【作者】杨仕伟【作者单位】贵州师范学院 550025【正文语种】中文电流模式控制;PWM控制器;电流反馈环路在电压调控下的开关电源控制体系不但有一个单一的控制环路,同时又有个Q值的共同控制点,在开环倍率特征的线条上表现为一个振峰比较大的数值,使体系的震动频率大增。
为了将这种震动对整个体系产生不良的影响,通过电压控制仪器设备,利用PI或PID对整体体系进行震动频率的调整,而这种调控措施降低了整个体系低频段的震动损坏,使整个体系的反应速度降低,影响了震动的特性。
电流模式的调控系统,对电流正常使用产生不利的影响,对整个体系的开环效率产生好的影响,使其变得比较容易调整。
一般情况下,采用电流调控方式后,电压环的电流传递速率将会发生巨大变化,其频率特征线条也会受到谐振峰的影响,所以对电压环进行恰当的调整将变得十分容易,可以提高电流的运转效率,使得整个电流运转体系的动态性加强,为其提供一个更加稳定的运转环境,不过电流模式的调控也具有明显的不足之处,正如下面提到的:(1)所占用的空间面积超过一半还多的时候,整个体系就会出现不稳定的问题,特别容易引起次谐波振荡的出现。
此外,在选择电路拓扑结构的过程中还会受到不同程度的限制,在升压型电路和降压—升压型电路中,因为距离电流输出端的距离过远,所以在峰值电流与平均电流之间从在这很大的不足之处。
(2)对杂音很敏感,而且对这些声音的抵抗能力比较弱小。
由于电感处于连续储能电流之中,所以电流在经过斜坡的过程中其输送效率也会明显地降低,电流信号中一旦产生一些杂音就会对整个控制系统产生不良的影响,在关闭的时候将会对共振谐波产生很大的影响,使系统进入次谐波振荡。
电流控制技术和斜坡补偿
电流控制技术和斜坡补偿一、电流型控制原理及特点原理:电流型脉宽调制(PWM)控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。
控制原理框图如下图(图1)所示。
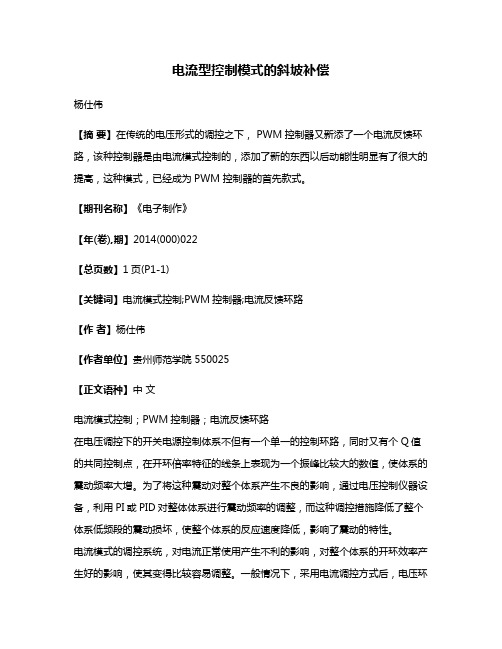
图 1 双环电流型控制器原理图从图 1 可以看出,电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟Vca 上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降,导致斜坡电压推迟到达Vca,使PWM 占空比加大,起到调整输出电压的作用。
由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
特点:a)由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到0.01%V, 能够与线性移压器相比。
b)由于双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。
c)由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1V,PWM 控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。
d)误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。
e)由于系统的内环是一个良好的受控电流放大器,所以把电流取样信号转变成的电压信号和一个公共电压误差放大器的输出信号相比较,就可以实现并联均流,因而系统并联较易实现。
峰值电流控制模式中的自适应斜坡补偿技术
峰值电流控制模式中的自适应斜坡补偿技术张普杰;王卫东【摘要】为了解决PWM(脉冲宽度调制)峰值电流模式中当占空比大于50%时发生次斜坡振荡的问题,提出了一种当输入输出电压变化时补偿量跟随变化的斜坡补偿电路方案.与固定斜坡补偿电路相比,本文设计的自适应补偿电路有更好的跟随性,还可避免发生过补偿问题.电路采用gpdk090 CMOS工艺仿真,由仿真结果可知,该电路可以很好地抑制次谐波振荡,提高电路的稳定性和性能.【期刊名称】《微型机与应用》【年(卷),期】2017(036)018【总页数】3页(P46-48)【关键词】自适应;占空比;峰值电流模式;斜坡补偿【作者】张普杰;王卫东【作者单位】桂林电子科技大学信息与通信学院,广西桂林541004;桂林电子科技大学信息与通信学院,广西桂林541004【正文语种】中文【中图分类】TN432Abstract: In order to Solve the problem of sub-harmonic oscillation in PWM peak current mode for duty cycle more than 50%, this paper presents a self-adaptable slope compensation circuit, whose compensation amount varies with input and output voltage automatically. Comparedwith fixed slope compensation circuit,the adaptive compensation circuits designed in this paper have better follow,also can avoid compensation.The circuit was simulated based on gppdk090 CMOS process. The results show that the circuit could effectively suppress sub-harmonic oscillations and improve stabilization of circuit and performances.Key words:self-adaptation; duty cycle; peak current mode; slope compensation电流模式和电压模式是开关电源中主要的控制模式,脉冲宽度调制(PWM)电流模技术是现在开关电源管理技术中最常用的控制方法。
峰值电流控制变换器斜坡补偿电路的优化设计
峰值电流控制变换器斜坡补偿电路的优化设计在现代电力电子领域,峰值电流控制变换器因其诸多优点而得到了广泛应用。
然而,在其工作过程中,存在着一些潜在的不稳定因素,其中一个关键问题就是需要进行斜坡补偿。
斜坡补偿电路的设计对于保证峰值电流控制变换器的稳定运行和性能优化至关重要。
本文将深入探讨峰值电流控制变换器斜坡补偿电路的优化设计,以满足日益复杂的电力电子应用需求。
一、峰值电流控制变换器的工作原理在深入研究斜坡补偿电路之前,我们首先需要了解峰值电流控制变换器的基本工作原理。
峰值电流控制模式是通过检测电感电流的峰值,并将其与控制信号进行比较来调节输出。
这种控制方式响应速度快,能够有效地提高系统的动态性能。
然而,峰值电流控制模式存在一个固有的问题,即在占空比大于 50%时,系统容易出现不稳定现象。
这是由于电感电流的峰值和平均值之间存在误差,导致控制环路的增益发生变化,从而影响系统的稳定性。
二、斜坡补偿的必要性为了解决峰值电流控制变换器在占空比大于 50%时的不稳定问题,引入斜坡补偿是必要的。
斜坡补偿的基本思想是在电感电流的检测信号上叠加一个适当的斜坡信号,以修正电感电流峰值和平均值之间的误差,从而保证系统在整个占空比范围内的稳定性。
如果没有斜坡补偿,当占空比增大时,电感电流的峰值和平均值之间的差异会逐渐增大,导致控制环路的增益不稳定,可能引发系统的振荡或不稳定运行。
因此,斜坡补偿对于维持峰值电流控制变换器的稳定工作具有重要意义。
三、常见的斜坡补偿电路类型在实际应用中,常见的斜坡补偿电路有多种类型。
其中,基于电阻电容(RC)网络的斜坡补偿电路是较为简单和常用的一种。
这种电路通过在检测电阻上并联一个 RC 网络,产生一个与电感电流斜率相反的斜坡信号,从而实现补偿。
另外,基于电流源的斜坡补偿电路也是一种有效的方式。
电流源通过对电容进行充电或放电,产生所需的斜坡信号。
这种电路具有较高的精度和稳定性,但设计相对复杂,成本也较高。
峰值电流控制斜波补偿

峰值电流控制模式中斜坡补偿的分析刘成吴玉广(西安电子科技大学微电子学院,陕西西安710071)摘要:本文介绍了电流控制型开关电源中峰值电流控制模式的原理及优点,指出了功率管的占空比大于50%时必须进行斜坡补偿,否则电路不能稳定工作。
分析了斜坡补偿的基本原理和设计问题,给出了补偿电路。
关键词:峰值电流控制模式误差电压采样电压斜坡补偿中图分类号:TN403 文献标识码:BAnalysis and Design of Slop Compensation in the Peak Current ControlLIU CHeng,, WU Yu guang(Microelectronic Institute, Xidian Uuniversity , Xi’an , Shan xi)Abstrac t:The paper introduces the principle and the merit of the peak current control in the monolithic current-mode switching regulator and points out that it need slop compensation when the of the MOSFET exceed 50%,otherwise the circute can’t work steadily. The basic principle and the design question of slop compensation are analysed and the compensation circute is given.Key words: peak current control errors voltage sense voltages slop compensation开关功率电路的控制模式可分为电流模式控制和电压模式控制。
基于峰值电流控制芯片UC3846的斜坡补偿电路设计

基于峰值电流控制芯片UC3846的斜坡补偿电路设计
主电路拓扑采用双管正激电路
UC3846 的斜坡补偿选择电路根据峰值电流控制的电路图可以看到,加入斜坡补偿有两种方法,
一种是将斜坡补偿信号加到电流检测信号中,如图17 所示;另一种是将斜坡补偿信号从误差电
压信号中减去,如图18 所示。
图18 将斜坡补偿加到电压检测信号上
前一种实现方法简单,但由于斜坡补偿信号的加入,有可能在实现电流限
制功能时产生误差。
第二种方法实现时必须满足两个条件:①在开关频率附近,电压放大器的
增益必须为一个固定
的常数R1/R2;②当射极斜坡补偿时,电流放大器和电压放大器都必须考虑进去。
改进第一种
方法得到图19 所示电路,射极跟随器的接入减小了晶振端的输出阻抗。
图19 采用射极跟随器减小晶振的输出阻抗
参数选择采用单端正激电路设计1000W 通信电源,以UC3846 作为控制芯片,交流输入165~
275V;输出50V,20A;工作频率80k Hz;匝比8/1(Np/Ns),检测电阻Rsense=0.4O;输出电感
L=40uH;晶振电容CT=1nF;死区时间0.145us。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电流控制技术和斜坡补偿叶泽刚时间:2010-11-29 594次阅读【网友评论0条我要评论】收藏电源网讯一、电流型控制原理及特点原理:电流型脉宽调制(PWM)控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。
控制原理框图如下图(图1)所示。
图 1 双环电流型控制器原理图从图 1 可以看出,电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟Vca 上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降,导致斜坡电压推迟到达Vca,使PWM 占空比加大,起到调整输出电压的作用。
由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
特点:a)由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到0.01%V, 能够与线性移压器相比。
b)由于双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。
c)由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1V,PWM 控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。
d)误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。
e)由于系统的内环是一个良好的受控电流放大器,所以把电流取样信号转变成的电压信号和一个公共电压误差放大器的输出信号相比较,就可以实现并联均流,因而系统并联较易实现。
二、峰值电流控制与平均电流控制的比较峰值电流模式控制和平均电流模式控制相比主要具有以下缺点:(1)对噪声敏感,峰值电流模式控制是将电感电流的上升沿(即开关电流)同设定的电流值相比较,当瞬态电流达到设定值,PWM比较器输出翻转将功率开关管关断。
电感电流上升到设定值的坡度即(Vin-Vout)/L 很小,特别是Vin 小时坡度更小,所以这种控制方法易受噪声干扰。
每次开关管通断时都会产生噪声尖峰,并且耦合到控制电路的一个小电压就能使开关管迅速关断,使电路处于次谐波运作模式产生很大的纹波,所以对于峰值电流控制模式,电路布局和噪声旁路设计对电路的正常工作很重要,平均电流模式控制可以简化这部分工作。
(2)需斜坡补偿,对于峰值电流控制,当占空比大于50%时扰动电流引起的电流误差越变越大。
所以尖峰电流模式控制在占空比大于50%时,电路工作不稳定,需给PWM比较器加坡度补偿以使电路稳定。
内部电流环的增益尖峰会使相移超出范围,导致电路工作不稳定,使电压环进入次谐波振荡。
这时在连续固定的驱动脉冲时,输出占空比却在变化,这时也需斜坡补偿来抑制次谐波振荡。
(3)具有尖峰值/平均值误差,在尖峰电流控制模式中,随着占空比的不同,电感电流的平均值亦不同,通过斜坡补偿可以获得不同占空比下一致的电感电流,但这也增加了电路的复杂性。
另外电感电流的平均和峰值间也存在差值,在BUCK 电路中由于电感电流的纹波相对电感电流的平均值很小,并且存在电压外环的校正作用,所以峰值和平均值的这种误差可以忽略;在BOOST 电路中,峰值要跟随输入电网的正弦波,所以和平均值间的误差很大,在小电流时,尤其是电流不连续时,如每半周期输入电流过零时,这种误差最大,它会使输入电流波形畸变。
这时就需要一个大电感来使电感电流的纹波变小,但这将使电感电流的坡度变窄,减小抗干扰能力。
平均电流控制和峰值电流控制相比的优点是:① 具有高增益的电流放大器,平均电流可以精确地跟踪电流设定值。
这点应用在高功率因数控制电路中尤其重要,此时用一个小电感就能获得小于3%的谐波畸变,并且即使电路模型由连续电流模式过渡到不连续电流模式,平均电流法也能很好地工作;② 噪声抑制能力强,因为当时钟脉冲使功率开关管开通后,晶振幅度迅速降到了一个低值;③ 无须斜坡补偿,但为了电路工作稳定,在开关频率附近必须限定环路增益;④ 平均电流法可应用在任意电路拓扑上,既能控制BUCK和Flyback 电路的输入电流,又能控制Boost 和Flyback 电路的输出电流。
若加入到PWM比较器输入端的波形坡度不合适,功率开关控制电路就会发生次谐波振荡。
峰值电流控制通过外加斜坡补偿来防止这种振荡;平均电流控制是由晶振幅度来提供足够的补偿坡度的。
所以,用平均电流模式解决次谐波问题更为合适。
在平均电流模式中为了抑制次谐波和限定开关频率附近电流放大器增益,在电路设计中必须遵循的一条标准是:接到PWM比较器的一个输入端的电感电流下降沿不能大于接到PWM 比较器的另一个输入端的晶振幅值坡度。
这也间接设定了最大电流环路增益的交越频率。
三、斜坡补偿的引入斜坡补偿原理:鉴于以下原因,峰值电流控制必须考虑采用斜坡补偿。
1 电路的稳定性图 2、图3 分别是占空比大于50%和小于50%的尖峰电流控制的电感电流波形图。
其中Ve 是电压放大器输出的电流设定值,?Io 是扰动电流,m1、m2 分别是电感电流的上升沿及下降沿斜率。
由图可知,当占空比小于50%时扰动电流引起的电流误差?I1 变小了,而占空比大于50%时扰动电流引起的电流误差? I1 变大了。
所以尖峰电流模式控制在占空比大于50%时,经过一个周期会将扰动信号扩大,从而造成工作不稳定,这时需给PWM比较器加坡度补偿以稳定电路,如图4 所示。
加了坡度补偿,即使占空比小于50%,电路性能也能得到改善。
图 2 占空比小于50%图 3 占空比大于50%讲沿的斜率2 m ,这样扰动信号在一个周期内就完成了校正,如图5 所示。
图 4 占空比大于50% 带坡度补偿图5 m=m2 时,电感电流波形2.减小尖峰值/平均值误差电流模式控制的实质是使平均电感电流跟随误差电压 Ve 设定的值,即可用一个恒流源来代替电感,使整个系统由二阶降为一阶。
但如图6 所示,尖峰电流控制模式中随着占空比D1、D2 的不同,电感电流的平均值I1、I2 亦不同。
如图7 示,可以通过斜坡补偿来获得不同占空比下一致的电感电流。
图 6 尖峰电流控制模式中不带斜坡补偿的平均电流和尖峰电流波形图另外图7 所示的电感电流平均值和峰值间也存在差值,在BUCK电路中由于电感电流的纹波相对电感电流的平均值很小,并且存在电压外环的校正作用,所以峰值和平均值的这种误差可以忽略;在BOOST电路中,峰值要跟随输入电网的正弦波,所以和平均值间的误差很大。
这种误差最大,需要一个大电感来使电感电流的纹波变小,减小抗干扰能力。
这也是在BOOST中采用平均值电流模式的原因。
图 7 尖峰电流控制模式中带斜坡补偿的平均电流和尖峰电流波形图3.抑制次谐波振荡内部电流环的增益尖峰是电流模式控制的一个重要问题。
这种增益尖峰发生在二分之一开关频率处,使相移超出范围,导致不稳定,并使电压环进入次谐波振荡。
这时在连续固定的驱动脉冲下,输出占空比却在变化,如图8 所示。
采用斜坡被偿也能很好地抑制次谐波振荡。
图8 次谐波振荡时的电感电流波形4.振铃电感电流① 电感电流对电源或负载的瞬态变化产生振铃响应;② 在开关频率附近控制环路增益达到最高,从而产生不稳定趋向。
通过斜坡补偿可以抑制这种振铃电感电流,例如当补偿坡度为电感电流下降沿的斜率时(即m=-m2),振铃电流在一个周期内就完全得到了抑制。
图 9 等效电感电流、电流误差和周期T 的关系曲线斜坡补偿设计步骤:图 10 示出斜坡补偿电路。
R1 和R2 组成了从晶振的输出到限流引脚(脚1)的分压网络,迭加斜坡补偿信号到初级的电流波形,R1、R2 值的比例决定了所加的斜坡补偿量。
电容C1是交流耦合电容,使晶振的交流分量耦合到R2,去掉了直流偏置部分。
C2 和R1 组成滤波电路,滤去初级Ip中的前沿尖峰,避免误动作。
? VOSC是晶振锯齿波的峰峰值。
将电容去掉得到图11 简化电路。
图10 斜坡补偿电路图 11 简化的斜坡补偿电路四、电流控制技术及斜坡补偿的应用1. 平均电流法Boost电路设计实例设计 1200W功率因数校正电路,采用Boost电路的拓扑,平均电流法的控制电路,UC3854BN的控制芯片。
电路参数如下:输入电压:Vin=220V±25%(165V~275V);直流输出电压:Vo=410V;开关频率:fs=80kHz;功率因数:PF>0.993;效率:?>0.95;电感:L=600μH;检测变压器变比:1∶100;检测电阻:15O。
①电流环设计为了稳定运行,须进行电流环相位补偿。
电流环补偿后在开关频率附近提供平稳增益。
在低频的零点响应提供高增益完成平均电流控制工作。
在开关频率附近误差放大器的增益要配合电感电流的下降沿。
本设计开关频率为80KHz,单位增益交越频率应为14KHz(1/6 开关频率),但本电流环的主要工作是跟踪线电流,故10KHz 的带宽是合适的值。
电流环的零点必须设置在交越频率上,或低于交越频率处。
如设置在交越频率上,相位裕度有45°,低于交越频率则相位裕度更大点。
45°的相位裕度的系统工作稳定、低过冲、干扰小,所以将零点设置在略低于交越频率处(fs 为10KHz)。
当极点高于开关频率的1/2 时,极点不会影响控制环的频率响应。
为了减少对噪声的敏感性,极点通常设置在开关频率附近。
本设计设置极点在开关频率处(fp 为80kHz)。
设计电流环的过程为先算出零点时功率部分的增益,而功率部分增益乘以电流放大器增益为整个电流环增益,整个电流环的增益为1 时算出电流放大器的交越频率(即零点),并且在交越频率处电流环的增益是功率部分增益的倒数,由此算出电流环的增益,由该增益算出补偿网络的电阻,由电阻和零点频率算出补偿网络的零点电容,再由极点频率算出补偿网络的极点电容。
具体计算过程为:电感电流的下降沿=(Vo-Vin)/L;最坏情况(Vin=0),电感电流的下降沿=Vo/L;晶振坡度=Vs/Ts=Vsfs。
因为电流放大器的输出不能大于晶振的输出,即电感电流的坡度不能大于晶振的坡度,所以电流放大器的增益最大时PWM 比较器的两个输入端信号相等,此时为:s而零点处功率部分的增益为:因为交越频率处整个电流环为单位增益,所以电流环增益为1,电流环增益及交越频率为:即交越频率为开关频率的ca G ——电流放大器的增益id G ——功率部分的增益se V ——晶振峰峰值rs V ——检测电阻电压ca V ——电流放大器输出电压sense R ——检测电阻i R ——从电流检测到电流放大器的反向输入端电流环的增益图(图13)和电流误差放大器的电路图(图14)如下所示。