步进电机定位控制系统设计
步进电机位置控制系统设计
23 6 程 。本系统正是结 合单片机技术 , 指导 学 A 8 S 1 的 P 、 1 P 三 组 l 口 , O AM一 H A1 P步 进 电机 驱 动 器 。 该 驱 动 T9 5 OP 、2 / 0 P 器主要用于驱动双极性步进 电机 。采用全 新 的 电流 控 制 技 术 , 现 电机 电流 的 精 确 实 控 制 , 效 降 低 输 出 力 矩 脉 动 , 高 了细 有 提
引脚 插 针
C 3
J P
1个
1个
u hr c a
ds l ip
【 】 =
{x O O f .x 4O b ,x 90 9 ,x 2O O c ,x 9O a ,x O0 9 ,x 20 8 ,x
屯子 世 界
— —
・ 1. 2 0 01 3
4 — 7 —
简易电路集锦 ・
・
简 易 电路集锦 ・
步进 电机位置控制 系统设 计
无 锡 技 师 学 院 电气 工 程 系 范 文字
1口外接 控制按 主要功 能 口用作数码 管 的段选 。P 在 工 业 控 制 系 统 中 , 其 是 机 械 加 工 生制作步进 电机位置控 制系统 , 尤 P. P .控 行 业 , 多 设 备 需 要 实 现 位 置 控 制 , 些 通 过 按 键 实 现 步 进 电 机 正 、 转 、 止 及 钮 , 1O控制步进 电机正 转 , 11 制步 很 这 反 停 进 电机 反 转 , 12控 制步 进 电机 自动 往 返 P. 并 设 备 的控 制 核 心 就 是 实 现 步 进 电机 运 动 自动 往 返 运行 , 实 时 显 示 步 进 电机 控 制 P. 14和 的控 制 。 步 进 电机 的 稳 定 、 靠 运 行 直 接 的位移量。借此希望提高学生对单 片机 的 运转 , 13控 制步 进 电机 停转 。 P - 可 P . 功 能 扩 展 控 制 按 钮 , 根 据 需 要 设 15为 可 关系到工业控制 的精度 和设备 的质 量 , 特 学 习兴 趣 以及 对步 进 电机 的理 解 。 别是在高精度数控 系统 中, 更是要 求步 进 电机 能够精确运行。如何实现对步进 电机
基于PID控制的步进电机位置闭环控制系统设计

基于PID控制的步进电机位置闭环控制系统设计一、引言在现代自动化控制系统中,步进电机广泛应用于各种精密定位和定量控制需求的场景。
步进电机的控制涉及到位置的精确定位和稳定性的维持,这就需要一个有效的闭环控制系统来实现。
PID控制器被广泛应用于步进电机的闭环控制系统设计中,本文将探讨基于PID控制的步进电机位置闭环控制系统的设计原理和实现方法。
二、步进电机简介步进电机是一种特殊的直流电动机,通过控制脉冲信号的频率和顺序来实现精确控制。
步进电机的圆周分为若干等角度的步进角,每个步进角对应一个旋转角度,这使得步进电机在控制方面更加便捷和精确。
由于步进电机无需传感器反馈,因此常用于定量控制和精确位置控制的场合。
三、PID控制器原理PID控制器是一种经典的闭环控制器,其由比例(P)、积分(I)、微分(D)三个部分组成。
比例控制决定输出与偏差的比例关系,积分控制消除系统稳态误差和提高系统的响应速度,微分控制用于抑制系统对于负荷变化的敏感性。
PID控制器采用反馈控制策略,利用实际输出和期望输出之间的偏差来调整控制量。
四、步进电机位置闭环控制系统设计步进电机的位置闭环控制系统设计基于PID控制器。
首先,需要传感器来获得实际位置信息,然后与期望位置进行比较以获取偏差。
接下来,将偏差作为输入,经过PID控制器计算出控制量,并输出给步进电机驱动器。
步进电机驱动器根据控制量控制步进电机的旋转,从而实现位置的精确控制。
五、传感器选择为了获取步进电机的实际位置信息,需要选择合适的传感器。
常用的传感器包括光电编码器和霍尔传感器。
光电编码器具有高精度和高分辨率的特点,但价格较高;霍尔传感器则具有较低的价格和较高的可靠性,但分辨率较低。
根据具体需求和预算可选择合适的传感器。
六、PID参数调整PID控制器的性能很大程度上取决于参数的选择。
比例参数决定了响应的速度和稳定性,过大的比例参数会导致系统震荡,过小则导致响应速度慢;积分参数消除稳态误差,过大的积分参数会导致系统震荡,过小则无法消除稳态误差;微分参数能够抑制系统对负荷变化的敏感性,过大的微分参数会导致系统噪声,过小则无法起到抑制作用。
步进电机定位控制

02
反应式步进电机
03
混合式步进电机
转子为软磁材料,结构简单、步 矩角小、精度较高,但动态性能 较差。
结合了永磁式和反应式的优点, 具有较高的精度和动态性能,但 结构复杂、成本较高。
步进电机的主要应用领域
01 数控机床:用于工件的精确加工和定位。
02 机器人:用于机器人的关节驱动和定位控 制。
03
自动化生产线:用于自动化生产线的物料 搬运和定位控制。
04
打印机、复印机等办公设备:用于纸张的 进给和定位控制。
02
CHAPTER
步进电机定位控制系统
定位控制系统的基本组成
控制器
用于接收输入的定位指令,并按照控制算法 生成驱动脉冲信号。
驱动器
将控制器输出的脉冲信号放大,驱动步进电 机转动。
步进电机
步进电机定位控制的软件实现
软件实现概述
软件实现是实现步进电机定位控制的 重要组成部分,主要包括脉冲发生、 运动控制和通信等功能。
脉冲发生
根据控制算法输出的控制信号,生成 相应的脉冲信号,驱动步进电机运动。
运动控制
实时监测步进电机的运动状态,根据 反馈信息调整控制信号,确保电机按 照预定轨迹运动。
通信功能
工作原理:步进电机内部通常由一组带有齿槽的转子构成,定子上有多相励磁绕组。当给定一个脉冲信号时,定子上的励磁 绕组会按一定的顺序通电,从而在转子上产生一个磁极,该磁极与定子上的齿槽对齐时,转子会转动一个步进角。步进角的 大小取决于转子的齿数和通电的相数。
步进电机的种类与特点
01
永磁式步进电机
结构简单、成本低、步矩角大, 但精度较低。
接受驱动器发出的脉冲信号,按照设定的步 数和方向转动。
基于plc控制的步进电机控制系统设计论文

基于PLC的步进电机控制系统设计机械电子专业 XXX指导教师 XXX摘要:以德国西门子公司小型可编程逻辑控制器S7—200为中央处理单元,以步进电机作为控制对象。
介绍了PLC的概念原理以与控制的优点,步进电机的概念与工作原理,现状以与发展方向。
PLC 与步进电动机一起结合起来有很高的研究价值与意义。
本文在介绍步进电机控制特点的基础上,重点研究了步进电机的控制策略。
设计了控制系统的硬件方案,并编写了相应的控制流程,测试了实际控制效果,并提出相应的整改措施,达到更加合理高效的目标。
对于使用步进驱动器的步进控制系统,控制器对步进电机的控制关键在于控制脉冲信号的产生。
介绍了使用该控制器产生控制脉冲信号的多种不同实现方法,进而实现对步进电机不同控制方法。
关键词:可编程逻辑控制器;步进电机;控制策略;控制流程The Research Of Stepper Control Method Motor Based OnPLC Student majoring inMachinery and electronics specialtyXXXTutorXXXAbstract:With small Germany Siemens S7-200 programmable logic controller of the central processing unit, with stepping motor as control object. This paper introduces the concept of PLC principle and advantage of the control, the concept and working principle of stepper motor, the current situation and development direction. PLC combined with stepper motor has a high research value and significance. In this paper, based on the introduction to the characteristics of the stepper motor control, step motor control strategies are researched. Design the hardware of the control system scheme, and write the corresponding control process, test the actual control effect, and puts forward the corresponding rectification measures, achieve more reasonable and efficient. For using stepper drive stepper control system, the controller of stepper motor control is the key to control the generation of pulse signal. This paper introduces the control using the controller a variety of different implementation methods of the pulse signal, then the method to realize different control the stepper motor.1 / 23Keywords:Programmable logic controller; Stepping motor; The control strategy; Control the process引言伴随着经济的快速发展,科技的日新月异,产品更新换代周期缩短,生产效率有了更高的要求,特别是计算机技术的广泛的推广和普与,信息产业发挥了它无与伦比的优越性和高效性,其中可编程逻辑器件就有了更多的用武之地。
实验五 步进电机单轴定位控制实验
方向信号 (a) 脉冲+方向 (b) 正脉冲+负脉冲 实验五 步进电机单轴定位控制实验一、实验目的1. 学习和掌握步进电机及其驱动器的操作和使用方法;2. 学习和掌握步进电机单轴定位控制方法;3.学习和掌握PLC 单轴定位模块的基本使用方法。
二、实验原理步进电动机是一种将电脉冲信号转换为相应的角位移或直线位移量的机电执行元件,即步进电动机输入的是电脉冲信号,输出的是角位移或直线位置。
每给一个脉冲,步进电动机转动一个角度,这个角度称为步距角。
运动速度正比于脉冲频率,角位移正比于脉冲个数。
步进电动机典型控制系统框图如图1-2-9所示。
图1-2-9 步进电动机典型控制系统框图位置控制单元可根据需要的频率和个数以及设定的加减时间控制步进电动机运动。
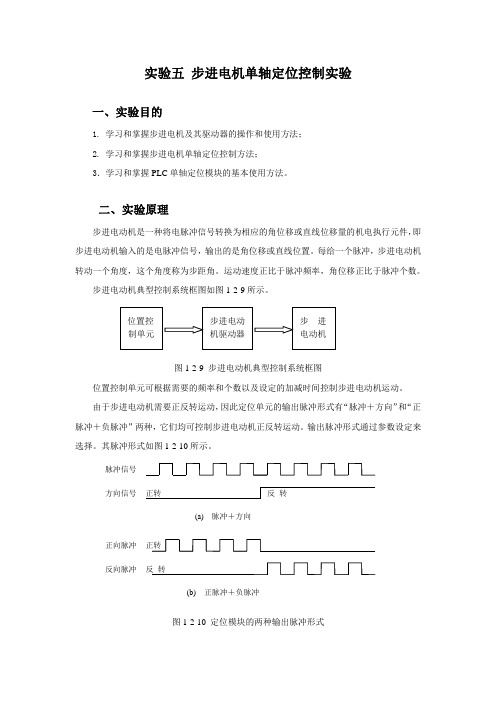
由于步进电动机需要正反转运动,因此定位单元的输出脉冲形式有“脉冲+方向”和“正脉冲+负脉冲”两种,它们均可控制步进电动机正反转运动。
输出脉冲形式通过参数设定来选择。
其脉冲形式如图1-2-10所示。
图1-2-10 定位模块的两种输出脉冲形式频 率 (HZ ) 脉冲数(PLS ) f 1S 2 S 3S 1由于步进电动机的电磁惯性和所驱动负载的机械惯性,速度不能突变,因此定位模块要控制升降频过程。
步进电机升、降频过程如图1-2-11。
一般情况下,S 2=S 3。
图 1-2-11 步进电机升、降频示意图其中:f 1——设定的运行频率,应小于步进电动机的最高频率;S 1——设定的总脉冲个数;S 2——升频过程中脉冲个数,由加速时间和运行频率确定;S 3——降频过程中脉冲个数,由减速时间和运行频率确定。
步进电动机驱动器将位置定位模块的输出脉冲信号进行分配并放大后驱动步进电动机的各相绕组,依次通电而旋转。
驱动器也可接受两种不同形式的脉冲信号,通过开关来选择,定位模块和驱动器的脉冲形式要相同。
另外,为了提高步进电动机的低频性能,驱动器一般具有细分功能,多个脉冲步进电动机转动一步,细分系数一般为1、2、4、8、16、32等几种,通过拨码开关来设定。
基于stm32的步进电机控制系统设计与实现
基于stm32的步进电机控制系统设计与实现基于STM32的步进电机控制系统设计与实现1. 概述步进电机是一种非常常见的电动机,在许多自动化系统和工控设备中得到广泛应用。
它们具有精准的定位能力和高效的控制性能。
本文将介绍如何使用STM32微控制器来设计和实现步进电机控制系统。
2. 硬件设计首先需要确定步进电机的规格和要求,包括步距角、相数、电流和电压等。
根据步进电机的规格,选择合适的驱动器芯片,常见的有L298N、DRV8825等。
接下来,将选定的驱动器芯片与STM32微控制器相连。
通常,步进电机的控制信号需要使用到微控制器的GPIO引脚,同时由于步进电机的工作电流比较大,需要使用到微控制器的PWM输出信号来调节驱动器芯片的电流限制。
除此之外,还需要一个电源电路来提供驱动器和步进电机所需的电源。
可以选择使用一个电源模块,也可以自行设计电源电路。
3. 软件设计软件设计是步进电机控制系统的核心部分,主要包括步进电机驱动代码的编写和控制算法的实现。
首先,需要在STM32的开发环境中编写步进电机驱动代码。
根据所选的驱动器芯片和步进电机规格,编写相应的GPIO控制代码和PWM输出代码。
同时,可以添加一些保护性的代码,例如过流保护和过热保护等。
接下来,需要设计和实现步进电机的控制算法。
步进电机的控制算法通常是基于位置控制或速度控制的。
对于位置控制,可以使用开环控制或闭环控制,闭环控制通常需要使用到步进电机的编码器。
对于开环控制,可以通过控制步进电机的脉冲数来控制位置。
通过控制脉冲的频率和方向,可以实现步进电机的转动和停止。
这种方法简单直接,但是定位精度有限。
对于闭环控制,可以使用PID控制算法或者更高级的控制算法来实现位置控制。
通过读取步进电机的编码器反馈信号,可以实时调整控制输出。
这种方法可以提高定位精度和抗干扰能力,但是算法实现相对复杂。
4. 系统实现在完成硬件设计和软件设计后,可以进行系统的调试和实现。
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计步进电机是一种特殊的直流电动机,具有定角度、定位置、高精度等特点,在许多领域得到广泛应用,如机械装置、仪器设备、医疗设备等。
本文将基于51单片机设计一个步进电机控制系统,主要包括硬件设计和软件设计两部分。
一、硬件设计步进电机控制系统的硬件设计主要包括51单片机、外部电源、步进电机驱动模块、以及其他辅助电路。
1.51单片机选择由于步进电机控制需要执行复杂的算法和时序控制,所以需要一个性能较高的单片机。
本设计选择51单片机作为主控芯片,因为51单片机具有丰富的外设接口、强大的计算能力和丰富的资源。
2.外部电源步进电机需要较高的电流供给,因此外部电源选择稳定的直流电源,能够提供足够的电流供电。
电源电压和电流的大小需要根据具体的步进电机来确定。
3.步进电机驱动模块步进电机驱动模块是连接步进电机和51单片机的关键部分,它负责将51单片机输出的脉冲信号转化为对步进电机的驱动信号,控制步进电机准确转动。
常用的步进电机驱动芯片有L297、ULN2003等。
4.其他辅助电路为了保证步进电机控制系统的稳定运行,还需要一些辅助电路,如限流电路、电源滤波电路、保护电路等。
这些电路的设计需要根据具体的应用来确定。
二、软件设计1.系统初始化系统初始化主要包括对51单片机进行外部中断、定时器、串口和IO 口等初始化设置。
根据实际需求还可以进行其他模块的初始化设置。
2.步进电机驱动程序步进电机的驱动程序主要通过脉冲信号来控制电机的转动。
脉冲信号的频率和脉冲宽度决定了电机的转速和运行方向。
脉冲信号可以通过定时器产生,也可以通过外部中断产生。
3.运动控制算法步进电机的运动控制可以采用开环控制或闭环控制。
开环控制简单,但无法保证运动的准确性和稳定性;闭环控制通过对电机转动的反馈信号进行处理来调整脉冲信号的生成,从而实现精确的运动控制。
4.其他功能设计根据具体的应用需求,可以加入其他功能设计,如速度控制、位置控制、加速度控制等。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
步进电机定位控制系统的设计

步进电机定位控制系统的设计作者:王雁平来源:《现代电子技术》2010年第18期摘要: 系统基于51单片机控制,以FPGA芯片来实现驱动,步进电机的脉冲分配作为核心电路加以必要的数字模拟辅助电路,形成一个4相8拍步进电机定位控制系统。
该系统完成了步进电机的正确脉冲分配并实现了步进电机的方向调节、速度调节及定位控制等功能,由于单片机控制模块的使用使得FPGA驱动模块对步进电机的定位控制更加方便,对步进电机的速度控制精度很高,并且更加准确。
关键词:步进电机; 定位控制; FPGA;脉冲分配中图分类号:TN919-34文献标识码:A文章编号:1004-373X(2010)18-0205-03Design of Stepper Motor Positioning Control SystemWANG Yan-ping(Automation Institute, Xi’an University of Posts and Telecommunication, Xi’an 710061, China)Abstract: A 4-phase 8-step stepper motor positioning control system is established based on 51 MCU, whose driver is achieved by adopting FPGA, and pulse allocating of stepper motor is used as kernel circuit supported with necessary digital analog circuit. This system can implement smoothly correct pulse allocating and can adjust the direction of stepper motor, speed and position, etc. Using the MCU control, the FPGA driven module can advance speed control accuracy.Keywords: stepper motor; positioning control; FPGA; pulse allocating0 引言步进电机是一种将电脉冲转化为角位移的执行机构。
基于FPGA的步进电机定位控制系统设计

况下 , 改变 设 备 的功 能 l .在 实 时 性 和 灵 活 性 等 性 能 上 l 都 有 很 大 的 提 高 , 利 于 步进 电机 的运 动 控 制 . 有
2 步进 电机 工 作 原 理
步进 电动 机 是 纯 粹 的数 字 控 制 电 动机 , 将 电 脉 冲 信 是
依次类推 , B、 D四相 绕组 轮 流供 电 , 转子 会沿 着 A、 C、 则 A、 C、 B、 D方 向转动 .四相步进 电机按照通 电顺序的不同 ,
收 稿 日期 O 0 l—2 2 1一 0 8
作者简 介: 张营( 96一) 男 , 17 , 山东滨州人 , 济宁学 院物理与信息工程系讲师 , 博士 , 研究方向 : 电系统 数字化与信息化 ;嵌人式机 电系 机
统.
一
2 — 4
可分为单 四拍 、 四拍 、 双 八拍 三种工作方式
4 控制程序与系统仿真
3 系统设计
在 Q atsI 环 境 中 用 V ro ur I u ei g语 言 实 现 了 系 统 设 计 l
号 转 换 成 角 位 移 的 执 行 元 件 , 输 入 一 个 脉 冲 信 号 , 进 即 步 电动 机 就 转 动 ~ 个 角 度 , 之 为 步 进 角 , 转 子 的 转 角 与 称 其
输入 的电脉冲数成正 比 , 其转速与输入的电脉 冲频 率成 正 比, 电动机的旋转方向则由脉冲的分配顺 序决定 . 而 图1 所示 四相反应式步进电机工作原理示 意图 .
.
采 用 V ro 语 言 和 F G 的优 点在 于 : el ig PA
步进电机控制系统设计

步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,具有快速启动能力,定位精度高,能够直接接受数字量,因此被广泛地应用于数字控制系统中,如数模转换装置、精确定位、计算机外围设备等,在现代控制领域起着非常重要的作用。
本设计运用了8086 CPU芯片以及74273芯片、8255A芯片和步进电机以及7位小功率驱动芯片ULN2003A、指示灯等辅助硬件电路,设计了步进电机正反转及调速系统。
绘制软件流程图,进行了软件设计并编写了源程序,最后对软硬件系统进行联合调试。
该步进电机的正反转及调速系统具有控制步进电机正反转的功能,还可以对步进电机进行调速。
关键词:步进电机;正反转;调速控制;ULN2003A芯片;8086微机系统1、课程设计任务书1.1任务和目的 (4)1.2设计题目 (4)1.3内容和要求 (4)1.4列出使用元器件和设备清单 (4)2、绪论 (4)3、步进电机的总体方案 (6)4、步进电机的硬件设计 (7)4.1总体设计思路 (7)4.2电路原理图 (10)4.3线路连接图 (11)5、步进电机软件设计 (12)5. 1流程图 (12)5.2控制程序 (14)&调试说明 (19)6.1调试过程 (19)6.2调试缺陷 (19)7、总结收获 (19)8、参考文献 (20)附录:元器件及设计清单1. 课程设计任务书1.1任务和目的掌握微机硬件和软件综合设计的方法。
1.2设计题目步进电机控制系统设计1.3内容和要求1. 基本要求:控制步进电机转动,要求转速1步/1秒;设计实现接口驱动电路。
2. 提高要求:改善步进电机的控制性能,控制步进电机转/停;正转/反转;改变转速(至少3挡);1.4列出使用元器件和设备清单8086cpu可编程并行接口8255指示灯键盘74LS138译码器驱动模块步进电机2. 绪论步进电机又称脉冲电动机或阶跃电动机,国外一般称为Step motor或Steeping motor、Stepper servo Steppe,等等。
基于stm32的步进电机控制系统设计与实现

基于STM32的步进电机控制系统设计与实现1. 引言步进电机是一种常见的电动机类型,具有定位准确、结构简单、控制方便等优点,在自动化控制领域得到广泛应用。
本文将介绍基于STM32单片机的步进电机控制系统设计与实现,包括硬件设计、软件开发和系统测试等内容。
2. 硬件设计2.1 步进电机原理步进电机是一种将输入脉冲信号转换为角位移的设备。
其工作原理是通过改变相邻两相之间的电流顺序来实现转子旋转。
常见的步进电机有两相、三相和五相等不同类型。
2.2 STM32单片机选择在本设计中,我们选择了STM32系列单片机作为控制器。
STM32具有丰富的外设资源和强大的计算能力,非常适合用于步进电机控制系统。
2.3 步进电机驱动模块设计为了实现对步进电机的精确控制,我们需要设计一个步进电机驱动模块。
该模块主要包括功率放大器、驱动芯片和保护电路等部分。
2.4 电源供应设计步进电机控制系统需要稳定可靠的电源供应。
我们设计了一个电源模块,用于为整个系统提供稳定的直流电源。
3. 软件开发3.1 开发环境搭建在软件开发过程中,我们需要搭建相应的开发环境。
首先安装Keil MDK集成开发环境,并选择适合的STM32单片机系列进行配置。
3.2 步进电机控制算法步进电机控制算法是实现步进电机精确控制的关键。
我们可以采用脉冲计数法、速度闭环控制等方法来实现对步进电机的位置和速度控制。
3.3 驱动程序编写根据硬件设计和步进电机控制算法,我们编写相应的驱动程序。
该程序主要负责将控制信号转换为驱动模块所需的脉冲信号,并通过GPIO口输出。
3.4 系统调试与优化在完成软件编写后,我们需要对系统进行调试和优化。
通过调试工具和示波器等设备,对系统进行性能测试和功能验证,以确保系统工作正常。
4. 系统测试与评估在完成硬件设计和软件开发后,我们需要对系统进行全面的测试和评估。
主要包括功能测试、性能测试和稳定性测试等内容。
4.1 功能测试功能测试主要验证系统是否按照预期工作。
步进电机控制系统的设计
步进电机控制系统的设计
步进电机控制系统是一种常见的电机控制系统,用于控制步进电机的速度和方向。
设计步进电机控制系统需要考虑以下几个方面:
1. 选择合适的步进电机:根据应用场景,选择适合的步进电机型号和规格。
根据步进电机的电阻、电感等参数,计算出合适的电流和电压。
2. 选择合适的驱动器:根据步进电机的规格和控制要求,选择适合的驱动器型号。
常见的驱动器有常流驱动器和常压驱动器两种。
常流驱动器适用于控制步进电机的转速和保证输出力矩的精度;常压驱动器适用于控制步进电机的位置和运动精度。
3. 设计控制电路:根据步进电机的控制要求,设计相应的控制电路,包括信号输入电路、脉冲控制电路和电源电路。
根据实际需求,可以选择使用微控制器、PLC或者其他控制器实现控制。
4. 编写控制程序:根据实际控制要求,编写相应的控制程序。
程序可以使用各种高级语言编写,如C语言、Python等。
5. 测试和调试:完成步进电机控制系统的设计后,需要进行测试和调试。
测试包括电路测试和控制程序测试。
进行测试时需要注意安全,避免电路短路、过载等问题。
在调试过程中,需要根据测试结果进行调整优化,直到达到预期的控制效果。
总之,步进电机控制系统的设计需要充分考虑电机的规格和控制要求,选择合适的驱动器和控制器,设计合适的控制电路和编写适合的控制程序,并进行充分的测试和调试。
步进电机控制系统的设计[文献综述]
![步进电机控制系统的设计[文献综述]](https://img.taocdn.com/s3/m/e9a33cfd4b73f242326c5fb6.png)
文献综述电子信息工程步进电机控制系统的设计摘要:步进电机是一种易于精确控制的执行元件,近几年来随着微电子技术的不断发展步进电机的控制方法也随之变得多种多样。
为了提高步进电机控制系统的动态性以及控制精度,本文献因此提出了一系列关于基于现场可编程门阵列(FPGA)和由数字信号处理器(DSP)构成的步进电机控制系统的设计方法。
关键字:现场可编程门阵列(FPGA);步进电机;数字信号处理器(DSP);引言20世纪后期随着晶体管的发明逐渐应用于步进电机上,使得对于数字化的控制变得更为容易。
如今的步进电机已广泛运用在高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中[1]。
例如数控机床、计算机设备、自动记录仪等,另外在工业自动化生产线、印刷设备中均有应用。
随着步进电机的应用越来越广泛,步进电机在实时性和灵活性等性能上的要求也越来越高,虽然步进电机的发展迅速,但是在大功率步进电机驱动电源的设计和使用仍然存在问题,很大程度上地限制了大功率步进电机在数控机床、自动控制等技术方面的应用。
一、基本概况步进电机(Stepping Motor)是将电脉冲信号转化为角(线)位移的电元件,当步进驱动器接受脉冲信号后,就会驱动步进电机转动一个固定的角度,即步距角。
因此,通常以通过控制脉冲个数和控制脉冲频率来调节和控制角位移量及电机转动的速度和加速度,从而达到准确的定位和调速的目的。
在非超载的情况下,脉冲信号的频率和脉冲数来决定了电机的转速停止的位置,且不受负载变化的影响。
因此步进电机在速度、位置等控制领域的控制变的非常简单且容易操作。
最早步进电机的原理与今天的反应式步进电机的组成原理基本相同。
随着时代的发展,微型计算机具有多功能的特点,因而步进电动机的控制方式变得灵活和多样。
早期的步进电机的控制系统是分立元件来控制回路,它的缺点是调试安装复杂,要消耗大量元器件,而且定型之后,不容易改变其控制方案。
基于微型计算机的控制系统则是通过软件来控制步进电机,这样能够更好地发挥步进电机的潜力;因此,用微型计算机控制步进电机已经成为一种必然的趋势,并且也符合数字化的时代发展要求。
步进电机控制系统设计

步进电机控制系统设计目录1绪论 (3)1.1 步进电机概述 (3)1.2 步进电机的特征 (3)1.3 步进电机驱动系统概述 (4)1.4 课题研究的主要内容 (4)2步进电机驱动系统的方案论证 (5)2.1 步进电机驱动系统简介 (5)2.2 步进电机驱动器的特点 (5)2.3 混合式步进电机的驱动电路分类和性能比较 (6)2.3.1 双极性驱动器与单极性驱动器 (6)2.3.2 单电压驱动方式 (8)2.3.3 高低压驱动方式 (9)2.3.4 斩波恒流驱动 (10)2.4 方案的确定 (10)3混合式步进电动机驱动控制系统硬件设计 (11)3.1单片机最小系统 (11)3.2 红外遥控电路 (12)3.2.1 红外发射电路 (12)3.2.2 红外接收电路 (13)3.3 LCD显示电路 (14)3.4 双机通讯 (15)3.5 步进电机驱动部分 (16)3.5.1 单极性步进电机驱动 (16)3.5.2 双极性步进电机驱动 (18)3.6 电源电路 (18)4 软件设计 (19)4.1 主机LCD显示菜单程序 (19)4.2 双机通讯程序 (20)4.3 下位机步进电机驱动程序 (22)5 驱动器试验结果 (24)5.1 概述 (24)5.2 试验内容和结论 (24)总结 (26)参考文献 (27)1绪论1.1 步进电机概述步进电机是将电脉冲信号转换为角位移或线性运动的执行器。
它由步进电机及其动力驱动装置组成,形成开环定位运动系统。
当步进驱动器接收到脉冲信号时,它驱动步进电机以设定方向以固定角度(步进角度)旋转。
脉冲输入越多,电机旋转的角度越大;输入脉冲的频率越高,电机的速度越快。
因此,可以通过控制脉冲数来控制角位移,从而达到精确定位的目的;同时,通过控制脉冲频率可以控制电机转速,从而达到调速的目的。
根据自身结构,步进电机可分为三类:反应型(VR),永磁型(PM)和混合型(HB)。
混合式步进电机具有无功和永磁两种优点,应用越来越广泛。
步进电机控制系统设计
步进电机控制系统设计花同【摘要】基于步进电机原理和单片机控制技术,进行了步进电机控制系统的硬件和软件设计。
系统采用离散方法实现了精确控制步进电机的目的。
单片机采用STC12C5624AD。
在单片机与步进电机之间选用SH2034M型号步进电机驱动器。
并在步进电机的转子上安装了霍尔位置传感器实现了步进电机控制系统的闭环控制。
在软件上给出了步进电机加减速速度控制算法流程图。
实验表明所设计的控制系统具有控制精度高,稳定性好等优点,可应用于无人机器人系统中。
%Based on the stepping motor principle and single-chip microcomputer control technology,hardware and software of the stepping motor control system have been designed.System uses discrete method realizing purpose of the precise control of stepping motor.Microcontroller usesSTC12C5624AD.Step-motor drive chooses SH2034M model between the microcontroller and step-motor.Hall position sensor is installed in the stepping motor rotor realizing the stepping motor control system of closed-loop control.The software is presented on deceleration stepper motor speed control algorithm flow chart.Experiments show that the design of control system has the high control accuracy,good stabilityetc,and can be applied into unmanned robot system.【期刊名称】《电子设计工程》【年(卷),期】2011(019)015【总页数】3页(P13-15)【关键词】单片机;细分驱动;升降速;离散控制【作者】花同【作者单位】武警工程学院研究生37队,陕西西安710086【正文语种】中文【中图分类】TP273步进电机是一种将电脉冲信号转换成相应的角位移(或线位移)的电磁机械装置[1]。
步进电机系统开发方案

步进电机系统开发方案
步进电机是一种通过控制电流大小和方向来驱动转子旋转的电机,它具有定位精度高、控制简单、响应迅速等优点,因此在许多自动化控制系统中得到了广泛应用。
步进电机的系统开发方案主要包括硬件设计和软件编程两个方面。
首先是硬件设计方面,主要需要设计电机驱动电路、控制器和电源等。
1. 电机驱动电路:根据步进电机的特性,采用适当的驱动方式,如全步进驱动、半步进驱动或微步进驱动。
电机驱动电路可以选择使用集成驱动芯片,也可以使用离散元件组成的驱动电路。
2. 控制器:设计一个控制器来控制步进电机的运动,通常采用单片机作为控制器,通过读取传感器的反馈信号确定电机的位置,并根据预定的控制算法来驱动电机旋转。
3. 电源:选择合适的电源供应步进电机系统,电源的稳定性和功率大小需要满足电机系统的需求。
其次是软件编程方面,主要包括控制算法的设计和编程实现。
1. 控制算法设计:根据步进电机的运动特性和系统需求,设计合适的控制算法,确定电机应该如何旋转以达到预定位置。
2. 程序编写:使用编程语言编写程序,在控制器上实现控制算法。
程序需要读取传感器数据、控制驱动电路以及与外部设备进行通信。
最后是整体系统测试和调试。
进行系统集成后,需要进行综合测试,验证硬件和软件的功能正常,并且达到了预期的性能要求。
如果发现问题,需要进行调试和优化,直到系统能够稳定
可靠地运行。
在步进电机系统的开发过程中,需要充分考虑各个组件之间的配合和协作,选用合适的硬件和软件设计方案,并进行系统测试和调试,才能确保最终的步进电机系统性能优良、稳定可靠。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学生学号课程设计题目步进电机定位控制系统设计学院信息工程学院专业班级姓名指导老师2013~2014学年6月20日课程设计任务书学生姓名:专业班级:指导教师:工作单位:题目:步进电机定位控制系统设计初始条件:1. 具备电子电路的基础知识及查阅资料和手册的能力;2. 熟悉ISE 仿真软件的操作与运用;3. 掌握步进电机的工作原理。
要求完成的主要任务:1. 设计一个基于FPGA 的4 相步进电机定位控制系统,包括步进电机方向设定电路模块、步进电机步进移动与定位控制模块和编码输出模块。
2.撰写符合学校要求的课程设计说明书。
时间安排:1、2014 年06月11日,布置课设具体实施计划与课程设计报告格式的要求说明。
2、2014 年06月12日至2014年06月17日,设计说明书撰写。
3、2014年06月18日,上交课程设计成果及报告,同时进行答辩。
指导教师签名:年月日系主任(或责任教师)签名:年月日目录摘要 (I)Abstract (II)1 设计目标及简介 (1)1.1设计目标 (1)1.2 步进电机简介 (1)2 VHDL语言介绍 (2)3 Quartus Ⅱ介绍 (3)4 系统组成 (4)4.1 四相步进电机工作原理 (4)4.2 系统组成 (6)5 模块设计 (7)5.1 FPGA模块图及信号说明 (7)5.2 系统模块构成 (7)5.3 各模块间整体共享的电路内部传递信号 (7)5.4 电机方向设定电路模块 (8)5.5 步进电机步进移动与定位控制模块 (9)5.6 编码输出模块 (9)6 程序设计与仿真 (10)7 仿真结果 (16)8 实验总结 (18)参考文献 (19)摘要在分析了步进电机工作原理的基础上,提出了步进电机定位控制系统的模块划分和实现方法。
以步进电机四相四拍工作方式为例,用Verilog编程在Altera 公司的FPGA开发系统中实现了各功能模块和显示程序。
在系统仿真的基础上,进行了功能模块的控制实验,实验结果和仿真一致,实现了对步进电机模组的预定控制。
关键词:步进电机定位控制Verilog硬件描述语言FPGAAbstractOn the basis of analysing stepping motor’s operational principle,we put forward modules division and realizing method of positioning control system which using stepping motor.Giving an example such as stepping motors which work in Four-phase-four-step mode,we use Verilog programming realized every foundational module and display routine in Altera’s FPGA development system.On the basis of system simulation,we conduct a controlling experiment about foundational modules,the results are the same as simulation’s results.We carried out the expected control about stepping motor.Keyword: stepping motor positioning control VHDL FPGA1 设计目标及简介1.1设计目标设计一个基于FPGA的4相步进电机定位控制系统。
1.2 步进电机简介步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
2 VHDL语言介绍VHDL的英文全名是Very-High-Speed Integrated Circuit Hardware Description Language,诞生于1982年。
1987年底,VHDL被IEEE和美国国防部确认为标准硬件描述语言。
VHDL主要用于描述数字系统的结构,行为,功能和接口。
除了含有许多具有硬件特征的语句外,VHDL的语言形式和描述风格与句法是十分类似于一般的计算机高级语言。
VHDL的程序结构特点是将一项工程设计,或称设计实体(可以是一个元件,一个电路模块或一个系统)分成外部(或称可视部分,及端口)和内部(或称不可视部分),既涉及实体的内部功能和算法完成部分。
在对一个设计实体定义了外部界面后,一旦其内部开发完成后,其他的设计就可以直接调用这个实体。
这种将设计实体分成内外部分的概念是VHDL系统设计的基本点。
VHDL 语言能够成为标准化的硬件描述语言并获得广泛应用,它自身必然具有很多其他硬件描述语言所不具备的优点。
归纳起来,VHDL 语言主要具有功能强大,设计方式多样;硬件描述能力强大;具有很强的移植能力;设计描述与器件无关程序易于共享和复用等优点。
3 Quartus Ⅱ介绍Quartus II 是Altera公司的综合性PLD/FPGA开发软件,支持原理图、VHDL、VerilogHDL以及AHDL(Altera Hardware Description Language)等多种设计输入形式,内嵌自有的综合器以及仿真器,可以完成从设计输入到硬件配置的完整PLD设计流程。
Quartus II可以在XP、Linux以及Unix上使用,除了可以使用Tcl脚本完成设计流程外,提供了完善的用户图形界面设计方式。
具有运行速度快,界面统一,功能集中,易学易用等特点。
Quartus II提供了完全集成且与电路结构无关的开发包环境,具有数字逻辑设计的全部特性,包括:可利用原理图、结构框图、VerilogHDL、AHDL和VHDL 完成电路描述,并将其保存为设计实体文件;芯片(电路)平面布局连线编辑;LogicLock增量设计方法,用户可建立并优化系统,然后添加对原始系统的性能影响较小或无影响的后续模块;功能强大的逻辑综合工具;完备的电路功能仿真与时序逻辑仿真工具;定时/时序分析与关键路径延时分析;可使用SignalTap II 逻辑分析工具进行嵌入式的逻辑分析;支持软件源文件的添加和创建,并将它们链接起来生成编程文件;使用组合编译方式可一次完成整体设计流程;自动定位编译错误;高效的期间编程与验证工具;可读入标准的EDIF网表文件、VHDL 网表文件和Verilog网表文件;能生成第三方EDA软件使用的VHDL网表文件和Verilog网表文件。
4 系统组成4.1 四相步进电机工作原理步进电机是利用数字信号控制的电机装置,步进电机每次接收到一组脉冲数字信号,便旋转一个角度,称为步进角。
不同规格的步进电机的步进角不同,与电动机内部的线圈数量有关。
线圈中的供应电流决定线圈所产生的磁场方向。
4相步进电机有两组线圈A和B,如图4.1所示,A、B两组垂直摆放线圈的电流方向的排列组合,最多可以产生8种磁场方向,分别是0º、45º、90º、135º、180º、225º、270º、315º。
图4.1 四相步进电机由表4.1可以知,假设电动机转子刻度在0º的位置,想让其转180º,可以使端口信号依次按0001,0011,0010,0110到0100变化。
注意:四相电动机有1相激磁法、2相激磁法和1-2相混合激磁法3种激磁方式。
不同的激磁方式,端口信号的顺序是不同的。
表4.1 四相步进电机的8个方向和电流以及电压信号的关系该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图4.2是该四相反应式步进电机工作原理示意图。
图4.2四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图4.3的a、b、c所示。
图4.3a 单四拍图4.3b 双四拍图4.3c 八拍4.2 系统组成图4.4 系统组成5 模块设计5.1 FPGA模块图及信号说明图5.1 FPGA模块图reset:系统内部复位信号,’1’时有效;dir:步进电机正反转的方向控制开关,0:逆时针,1:顺时针;clk:由FPGA内部提供的4MHz的时钟信号;ini:赋初值的使能开关,’0’时有效;manner:激磁方式的选择开关(两位),00:自动检测角度输入,决定激磁方式01:1-相激磁;10:2.相激磁;11:1-2.相激磁.angle:步进角的倍数设定输入键.baba:将内部计数器的count[3 downto 0]的数值编码输出5.2 系统模块构成系统主要由步进电机方向设定电路模块、步进电机步进移动与定位控制模块和编码输出模块构成。
前两个模块完成电机旋转方向设定,激磁方式设定和定位角度的换算等工作,后一个模块用于对换算后的角度量编码输出。
5.3 各模块间整体共享的电路内部传递信号count:内部电路计数累加器,用来产生输出所需对应的状态;cntinc:设定累加器所需的累加/减计数值;sntini:设定累加器所需的计数初值;angledncount:设定步进角所需处理的次数;Angledncntdec:设定步进角所需累减计数值;5.4 电机方向设定电路模块该模块设定了步进电机的旋转方向以及电机在任一方向上所需的初值与累加/减值。