matlab-SIMULINK仿真实例资料
matlab simulink案例

matlab simulink案例1. 电机传动系统模拟在这个案例中,我们将使用Simulink来模拟一个简单的电机传动系统。
我们将建立一个由电机、负载和控制器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整输入信号和控制器参数,我们可以观察系统的响应,并优化控制器的性能。
2. PID控制器设计在这个案例中,我们将使用Simulink来设计一个PID控制器,并将其应用于一个简单的控制系统。
我们将建立一个由传感器、控制器和执行器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整PID控制器的参数,我们可以观察系统的响应,并优化控制器的性能。
3. 机器人路径规划在这个案例中,我们将使用Simulink来进行机器人的路径规划。
我们将建立一个由传感器、路径规划器和执行器组成的系统,并使用Simulink来模拟机器人在不同环境中的路径规划行为。
通过调整路径规划器的算法和参数,我们可以优化机器人的路径规划性能。
4. 电力系统稳定性分析在这个案例中,我们将使用Simulink来进行电力系统的稳定性分析。
我们将建立一个由发电机、负载和传输线路组成的电力系统,并使用Simulink来模拟系统的动态行为。
通过调整系统的参数和控制策略,我们可以评估系统的稳定性,并优化系统的运行性能。
5. 汽车动力学模拟在这个案例中,我们将使用Simulink来进行汽车的动力学模拟。
我们将建立一个由车辆、发动机和传动系统组成的模型,并使用Simulink来模拟车辆在不同驾驶条件下的动力学行为。
通过调整车辆参数和控制策略,我们可以评估车辆的性能,并优化驾驶体验。
6. 无人机飞行控制在这个案例中,我们将使用Simulink来进行无人机的飞行控制。
我们将建立一个由无人机、传感器和控制器组成的系统,并使用Simulink来模拟无人机在不同飞行任务下的控制行为。
通过调整控制器的参数和飞行任务的要求,我们可以优化无人机的飞行性能。
matlab实验4simulink系统仿真
1. 模块间连线 先将光标指向一个模块的输出端,待光标变为十字符后,按下鼠标键并拖动,直到另 一模块的输入端。
6
Matlab实验讲义
2. 信号线的分支和折曲 (1) 分支的产生 将光标指向信号线的分支点上,按鼠标右键,光标变为十字符,拖动鼠标直到分支线 的终点,释放鼠标;或者按住 Ctrl 键,同时按下鼠标左键拖动鼠标到分支线的终点,如图 7.10 所示。
7.2.2 Simulink 的模型窗口
模型窗口由菜单、工具栏、模型浏览器窗口、模型框图窗口以及状态栏组成。
菜单 工具栏
模型浏览器
模型框图
状态栏
图7.5 双窗口模型窗口
1. 状态栏
3
Matlab实验讲义
2. 工具栏 模型窗口工具栏如图 7.6 所示。
创建并编译生成exe文件
展示父系统 打开调试器
开始仿真 结束仿真
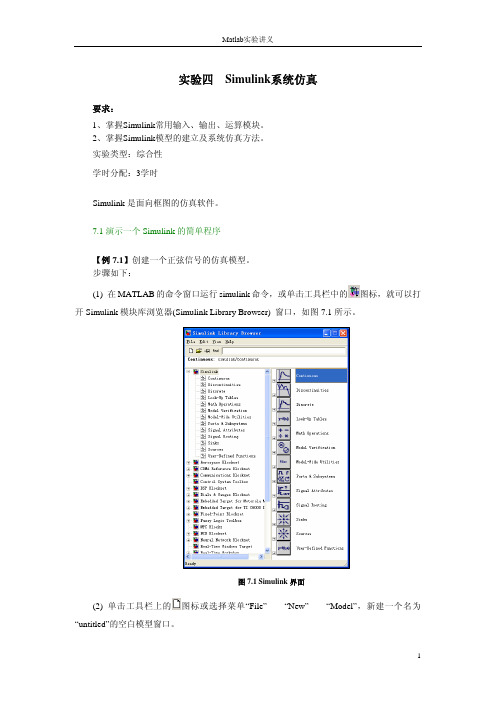
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白 模型窗口“untitled”,则“Sine Wave”模块就被添加到 untitled 窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到 untitled 窗口,如图 7.2 所示。
显示库链接 显示/隐藏阴影效果 设置不同的采样时间序列的颜色 粗线表示多信号构成的向量信号线 注明向量信号线的信号数 标明端口数据的类型 显示存储类型 数据浏览器 Simulink调试器 用户定义数据类型设计器 线性化分析工具
7.3 模型的创建
7.3.1 模块的操作
1. 对象的选定 (8) 选定单个对象 选定对象只要在对象上单击鼠标,被选定的对象的四角处会出现小黑块编辑框。 (9) 选定多个对象 如果选定多个对象,可以按下 Shift 键,然后再单击所需选定的模块;或者用鼠标拉出 矩形虚线框,将所有待选模块框在其中,则矩形框中所有的对象均被选中,如图 7.7 所示。
Matlab系列之Simulink仿真教程

交互式仿真
Simulink支持交互式 仿真,用户可以在仿 真运行过程中进行实 时的分析和调试。
可扩展性
Simulink具有开放式 架构,可以与其他 MATLAB工具箱无缝 集成,从而扩展其功 能。
Simulink的应用领域
指数运算模块
用于实现信号的指数运算。
减法器
用于实现两个信号的减法 运算。
除法器
用于实现两个信号的除法 运算。
对数运算模块
用于实现信号的对数运算。
输出模块
模拟输出模块
用于将模拟信号输出 到外部设备或传感器。
数字输出模块
用于将数字信号输出 到外部设备或传感器。
频谱分析仪
用于分析信号的频谱 特性。
波形显示器
控制工程
Simulink在控制工程领域 中应用广泛,可用于设计 和分析各种控制系统。
信号处理
Simulink中的信号处理模 块可用于实现各种信号处 理算法,如滤波器设计、 频谱分析等。
通信系统
Simulink可以用于设计和 仿真通信系统,如调制解 调、信道编码等。
图像处理
Simulink中的图像处理模 块可用于实现各种图像处 理算法,如图像滤波、边 缘检测等。
用于将时域信号转换为频域信号,如傅里叶变换、 拉普拉斯变换等。
03 时域变换模块
用于将频域信号转换为时域信号,如逆傅里叶变 换、逆拉普拉斯变换等。
04
仿真过程设置
仿真时间的设置
仿真起始时间
设置仿真的起始时间,通 常为0秒。
步长模式
选择固定步长或变步长模 式,以满足不同的仿真需 求。
基于MATLABSimulink的动态仿真的事例

2 3
4
MATLAB/Simulink应用实例 MATLAB/Simulink应用实例
1、背景知识 、 什么是系统仿真 什么是系统仿真? 是系统仿真
LOGO
系统仿真是建立在控制理论、相似理论、信 息处理技术和计算技术等理论基础之上的,以计 算机和其它专用物理效应设备为工具,利用系统 模型对真实或假想的系统进行试验,并借助于专 家经验知识、统计数据和信息资料对试验结果进 行分析研究,进而做出决策的一门综合性的和试 验性的学科。 在工程技术界,系统仿真是指通过对系统模 型的试验,间接地获取原形的规律性认识
LOGO
LOGO
例:已知系统模型G(s)= 期为5s的方波信号作用下的响应。
M文件代码 文件代码
,计算系统在周
响应曲线
Thank you
MATLAB的语言特点
编程效率高 使用方便 高效方便的科学计算 先进的可视化工具 开放性,可扩展性强 运行时动态连接外部C或FORTRAN C FORTRAN应用函数 MATLAB及其他标准格式的数据文件 输入输出各种MATLAB 特殊应用工具箱 高效仿真工具Simulink Simulink
MATLAB的模块构成
LOGO
SIMULINK是一个进行动态系统建模、仿真和综合分析的集 是一个进行动态系统建模、 是一个进行动态系统建模 成软件包。它可以处理的系统包括:线性、非线性系统; 成软件包。它可以处理的系统包括:线性、非线性系统;离 连续及混合系统;单任务、 散、连续及混合系统;单任务、多任务离散事件系统 SIMULINK 提供的图形用户界面 提供的图形用户界面GUI上,只要进行鼠标的简 上 单拖拉操作就可构造出复杂的仿真模型。 单拖拉操作就可构造出复杂的仿真模型。它外表以方块图形 式呈现,且采用分层结构。 式呈现,且采用分层结构。 从建模角度讲,这既适于自上而下( 从建模角度讲,这既适于自上而下(Top-down)的设计流 ) 概念、功能、系统、子系统、直至器件), ),又适于自下 程(概念、功能、系统、子系统、直至器件),又适于自下 而上( 而上(Bottum-up) 逆程设计。 ) 逆程设计。 从分析研究角度讲, 从分析研究角度讲,这种 SIMULINK 模型不仅能让用户知 道具体环节的动态细节,而且能让用户清晰地了解各器件、 道具体环节的动态细节,而且能让用户清晰地了解各器件、 各子系统、各系统间的信息交换, 各子系统、各系统间的信息交换,掌握各部分之间的交互影 响。 SIMULINK 环境中,用户将观察到现实世界中非线性因素 环境中, 和各种随机因素对系统行为的影响。 和各种随机因素对系统行为的影响。 SIMULINK 环境中,用户可以在仿真进程中改变感兴趣的 环境中, 参数,实时地观察系统行为的变化。 参数,实时地观察系统行为的变化。
MATLAB实验SIMULINK仿真
实验九SIMULINK仿真一、实验目的SIMULINK是一个对动态系统(包括连续系统、离散系统和混合系统)进行建模、仿真和综合分析的集成软件包,是MA TLAB的一个附加组件,其特点是模块化操作、易学易用,而且能够使用MATLAB提供的丰富的仿真资源。
在SIMULINK环境中,用户不仅可以观察现实世界中非线性因素和各种随机因素对系统行为的影响,而且也可以在仿真进程中改变感兴趣的参数,实时地观察系统行为的变化。
因此SIMULINK已然成为目前控制工程界的通用软件,而且在许多其他的领域,如通信、信号处理、DSP、电力、金融、生物系统等,也获得重要应用。
对于信息类专业的学生来说,无论是学习专业课程或者相关课程设计还是在今后的工作中,掌握SIMULINK,就等于是有了一把利器。
本次实验的目的就是通过上机训练,掌握利用SIMULINK对一些工程技术问题(例如数字电路)进行建模、仿真和分析的基本方法。
二、实验预备知识1. SIMULINK快速入门在工程实际中,控制系统的结构往往很复杂,如果不借助专用的系统建模软件,则很难准确地把一个控制系统的复杂模型输入计算机,对其进行进一步的分析与仿真。
1990年,Math Works软件公司为MATLAB提供了新的控制系统模型图输入与仿真工具,并命名为SIMULAB,该工具很快就在控制工程界获得了广泛的认可,使得仿真软件进入了模型化图形组态阶段。
但因其名字与当时比较著名的软件SIMULA类似,所以1992年正式将该软件更名为SIMULINK。
SIMULINK的出现,给控制系统分析与设计带来了福音。
顾名思义,该软件的名称表明了该系统的两个主要功能:Simu(仿真)和Link(连接),即该软件可以利用系统提供的各种功能模块并通过信号线连接各个模块从而创建出所需要的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真和分析。
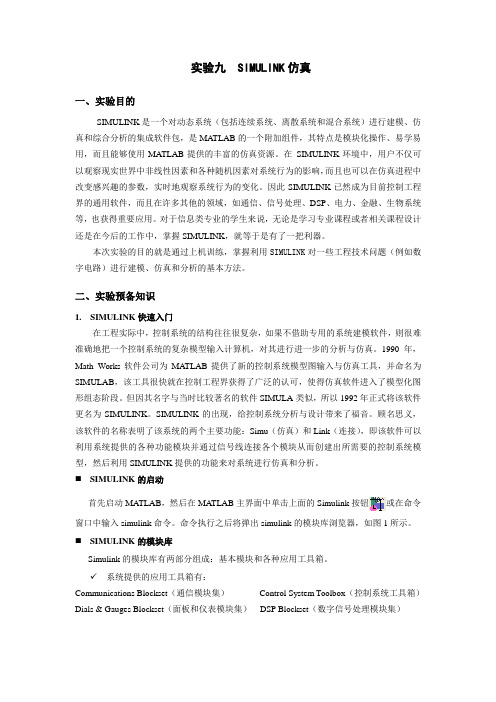
⏹SIMULINK的启动首先启动MATLAB,然后在MA TLAB主界面中单击上面的Simulink按钮或在命令窗口中输入simulink命令。
matlab simulink仿真基础与工程应用实例

Singletasking: b) Singletasking:这种模式不检查模块间的 速率转换, 速率转换,它在建立单任务系统模型时非 常有用, 常有用,在这种系统就不存在任务同步问 题。 Auto:这种模式,simulink会根据模型中 c) Auto:这种模式,simulink会根据模型中 模块的采样速率是否一致, 模块的采样速率是否一致,自动决定切换 multitasking和singletasking。 到multitasking和singletasking。
Simulink 基础及应用
1
目
录
第一章:概 第一章: 述 第二章: 第二章:基本知识 第三章:实例分析 第三章:
第一章 概述
simulink是Mathworks公司开发的另一个 simulink是Mathworks公司开发的另一个 著名的动态仿真系统,它是Matlab Matlab的一个 著名的动态仿真系统,它是Matlab的一个 附加组件, 附加组件,为用户提供了一个建模与仿真 的工作平台。 的工作平台。 它能够实现动态系统建模与仿真的环境集 且可以根据设计及使用的要求, 成,且可以根据设计及使用的要求,对系 统进行修改与优化, 统进行修改与优化,以提高系统工作的性 能,实现高效开发系统的目的
1 Gain
1 Slider Gain |u| Product Divide eu Math Function t Sine Wave Function Product of Elem ents floor Rounding Function
f (z)
Dot Product P(u) O(P) = 5 Polynomial
4
第二章 基本知识
一.启动关闭 启动关闭
MATLABsimulink仿真试验
实验七SIMULINK 仿真集成环境一、实验目的熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。
二、实验内容(1) SIMULINK 模型的创建和运行。
(2) 一阶系统仿真。
三、实验步骤1.Simulink 模型的创建和运行(1) 创建模型。
①在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。
②在MATLAB 菜单或库浏览器菜单中选择File|New|Model,或者单击库浏览器的图标,即可新建一个“untitle”的空白模型窗口。
③打开“Sources”模块库,选择“Sine Wave”模块,将其拖到模型窗口,再重复一次;打开“Math Operations”模块库选取“Product”模块;打开“Sinks”模块库选取“Scope”模块。
(2) 设置模块参数。
①修改模块注释。
单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。
②双击下边“Sine Wave”模块,弹出参数对话框,将“Frequency”设置为100;双击“Scope”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes”为3。
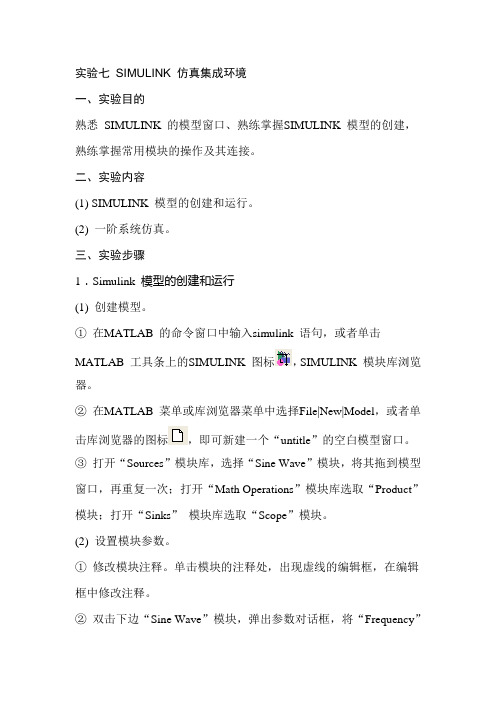
③如图A4 所示,用信号线连接模块。
图A4(3) 启动仿真①单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope”模块弹出示波器窗口,可以看到波形图。
②修改仿真步长。
在模型窗口的Simulation 菜单下选择“Configuration Parameters”命令,把“Max step size”设置为0.01;启动仿真,观察波形是不是比原来光滑。
③再次修改“Max step size”为0.001;设置仿真终止时间为10s;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。
simulink仿真简单实例
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
机电系统动态仿真matlabPPT电子教案课件-第七章-SIMULINK仿真
功能
积分 微分 状态方程 传递函数 零极点 传输延时 可变传输延时
23
Simulink的基本模块
SIMULINK仿真 4.离散系统模块库
模块
Unit Delay Discrete-Time I Discrete Transf F
功能
单位延时采样保持 离散时间积分 离散传递函数
Discrete Filter Discrete Zero-Pole Discrete State-Space Zero-order Hold First-order Hold
45
仿真模型的参数设置
SIMULINK仿真
7.4.3 启动系统仿真与仿真结果分析 设置完仿真参数之后,从Simulation中选择Start菜 单项或单击模型编辑窗口中的Start Simulation命令 按钮,便可启动对当前模型的仿真。
为了观察仿真结果的变化轨迹可以采用3种方法: (1) 把输出结果送给Scope模块或者XY Graph模块。 (2) 把仿真结果送到输出端口并作为返回变量,然后使
34
仿真模型的参数设置
SIMULINK仿真 1.模块的参数设置
35
仿真模型的参数设置
SIMULINK仿真 2.模块的属性设置 ✓ 模块上按鼠标右键并在弹出的快捷菜单中选择Block properties ✓ 在模型编辑窗口的Edit菜单下选择Block properties命令,将打开模块属性对话框。
5
认识Simulink
SIMULINK仿真 7.1.2 Simulink的启动与退出 1.Simulink的启动
在MATLAB窗口的工具栏中单击 在命令窗口中输入命令:
>>simulink
MATLAB控制系统各种仿真例题(包括simulink解法)

一、 控制系统的模型与转换1. 请将下面的传递函数模型输入到matlab 环境。
]52)1)[(2(24)(32233++++++=s s s s s s s G )99.02.0)(1(568.0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s');G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5));GTransfer function:s^3 + 4 s + 2------------------------------------------------------s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3>> num=[1 0 0.56];den=conv([1 -1],[1 -0.2 0.99]);H=tf(num,den,'Ts',0.1)Transfer function:z^2 + 0.56-----------------------------z^3 - 1.2 z^2 + 1.19 z - 0.992. 请将下面的零极点模型输入到matlab 环境。
请求出上述模型的零极点,并绘制其位置。
)1)(6)(5()1)(1(8)(22+++-+++=s s s s j s j s s G )2.8()6.2)(2.3()(1511-++=----z z z z z H ,T=0.05s>>z=[-1-j -1+j];p=[0 0 -5 -6 -j j];G=zpk(z,p,8)Zero/pole/gain:8 (s^2 + 2s + 2)--------------------------s^2 (s+5) (s+6) (s^2 + 1)>>pzmap(G)>> z=[0 0 0 0 0 -1/3.2 -1/2.6];p=[1/8.2];H=zpk(z,p,1,'Ts',0.05)Zero/pole/gain:z^5 (z+0.3125) (z+0.3846)-------------------------(z-0.122)Sampling time: 0.05>>pzmap (H )num=[0,7.1570,-6.4875 ];den=[1,-2.2326,1.7641,-0.4966];sysd=tf(num,den,0.05,'variable','z^-1')Transfer function:7.157 z^-1 - 6.487 z^-2-----------------------------------------1 - 2.233 z^-1 + 1.764 z^-2 - 0.4966 z^-3Sampling time: 0.05二、 线性系统分析1. 请分析下面传递函数模型的稳定性。
matlab-SIMULINK仿真实例资料

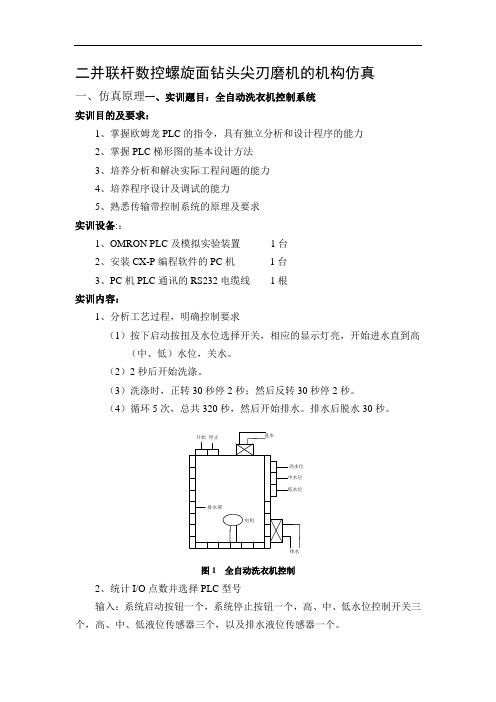
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理一、实训题目:全自动洗衣机控制系统实训目的及要求:1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力2、掌握PLC梯形图的基本设计方法3、培养分析和解决实际工程问题的能力4、培养程序设计及调试的能力5、熟悉传输带控制系统的原理及要求实训设备::1、OMRON PLC及模拟实验装置1台2、安装CX-P编程软件的PC机1台3、PC机PLC通讯的RS232电缆线1根实训内容:1、分析工艺过程,明确控制要求(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1 全自动洗衣机控制2、统计I/O点数并选择PLC型号输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。
3、I/O分配表1 全自动洗衣机控制I/O分配表输入输出地址名称地址名称00000 启动系统按钮01000 排水显示灯00001 高水位选择按钮01001 脱水显示灯00002 中水位选择按钮01002 进、出水显示灯00003 低水位选择按钮01003 高水位显示灯00004 排水液位传感器01004 中水位显示灯00005 停止系统按钮01005 低水位显示灯00006 高水位液位传感器01006 电机正转显示灯00007 中水位液位传感器01007 电机反转显示灯00008 低水位液位传感器4、PLC控制程序设计及分析实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
simulink离散仿真简单实例

simulink离散仿真简单实例Simulink是MATLAB的一个工具箱,它提供了一个图形化界面,用于建立和模拟动态系统。
它使用块图的形式表示系统,其中每个块代表系统中的一个组件或功能单元。
这些块可以通过线连接在一起,以表示信号的流动。
通过配置块的参数和连接,可以建立一个完整的系统模型。
在Simulink中进行离散仿真时,时间被划分为离散的步长,系统在每个步长内的行为被模拟。
离散仿真可以用于分析系统在不同时间点的行为,例如系统的稳定性、响应时间等。
接下来,我们将通过一个简单的实例来展示Simulink离散仿真的过程。
假设我们要建立一个简单的温度控制系统,系统包括一个温度传感器、一个控制器和一个加热器。
温度传感器用于测量当前环境温度,控制器根据测量值调整加热器的功率。
在Simulink中创建一个新的模型。
在模型中,我们将使用三个块来表示系统的各个组件:一个输入块用于表示环境温度的输入信号,一个控制器块用于调整加热器的功率,一个输出块用于表示系统的输出信号。
接下来,我们需要配置每个块的参数和连接它们。
输入块可以配置为生成一个随机的环境温度信号,控制器块可以配置为根据测量值输出一个控制信号,输出块可以配置为显示系统的输出信号。
通过连接输入块、控制器块和输出块,我们可以建立一个完整的系统模型。
在配置完模型后,我们可以设置仿真参数。
例如,我们可以设置仿真的时间范围、步长等参数。
然后,我们可以运行仿真并观察系统的行为。
通过仿真结果,我们可以分析系统的稳定性、响应时间等性能指标。
通过这个简单的实例,我们可以看到Simulink离散仿真的基本过程。
首先,我们建立一个系统模型,然后配置各个组件的参数和连接它们。
最后,我们设置仿真参数并运行仿真来分析系统的行为。
Simulink离散仿真可以应用于各种实际问题的建模和分析。
例如,它可以用于分析控制系统的性能、优化电路设计、评估通信系统的可靠性等。
通过Simulink离散仿真,我们可以更好地理解和改善系统的行为。
matlABSIMULINK联合仿真经典的例子

数控螺旋面钻头尖刃磨机的机构仿真一、原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3)S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析) 对动平台4:受力分析如图4图4动平台4的受力分析对并联杆2:受力分析如图5图5并联杆2的受力分析 对直线电机滑块1:受力分析如图6图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析 二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R 1+R2=R3+R4 将上述矢量方程分解为x 和y 方向,并分别对方程两边对时间t 求两次导数得: r1_do t _dot +r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12) r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13) 三)质心加速度的矢量方程矢量关系:Ac3=Rc3_d o t_do t Ac4=R3_do t_dot + Rc4_d o t_do t Ac2=R3_do t_dot + R4_do t_dot + Rc2_d o t_do t (_dot_d ot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y ,F43x,F43y,F13x,F13y,Fy ,Fm 引入的加速度有: α2,α3,r1_do t _dot ,A c3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式101000000000020001010000000000200002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----3000000001010000000030000003333000003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅00330000100000000000003300000100000000003300001rc C r S r C ⎛⎫⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα∙∙⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
Matlab——Simulink仿真实验

未加 PID 控制器的系统仿真图
从观测器得到的系统响应曲线如图所示:
未加 PID 控制器的系统响应曲线 可以看到系统并没有稳定在零点,而是出现了较大的偏差,这不是我们需要的仿真结 果。下面我们把 PID 控制器接入到系统中,得到系统的仿真模型如图所示:
ቤተ መጻሕፍቲ ባይዱ
这就是说在控制器中仅引入比例项往往是不够的比例项的作用仅是放大误差的幅值而目前需要增加的是微分项它能预测误差变化的趋势这样具有比例微分的控制器就能够提前使抑制误差的控制作用等于零甚至为负值从而避免了被控量的严重超调
利用 simulink 模块进行仿真实验
一、实验目的和内容
根据一个已知的传递函数,应用 PID 反馈控制器,将系统稳定在 0 点。 PID(比例-积分-微分)控制器作为最早实用化的控制器已有 70 多年历史,现在仍然 是应用最广泛的工业控制器。 PID 控制器简单易懂, 使用中不需精确的系统模型等先决条件, 因而成为应用最为广泛的控制器。 PID 控制器由比例单元(P) 、积分单元(I)和微分单元(D)组成,本次实验需要自己 搭建 PID 控制器模块,了解 PID 控制器的工作原理。
关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。 其原因是由于存在 有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误 差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的 作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作用仅 是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有 比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了 被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系 统在调节过程中的动态特性。 通过这次的仿真实验,了解了 matlab 中的 simulink 模块的使用和仿真,了解了 PID 控 制的原理和规律,为以后的更大规模的控制仿真实验打下基础。
matlab-SIMULINK仿真实例解析
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理一、实训题目:全自动洗衣机控制系统实训目的及要求:1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力2、掌握PLC梯形图的基本设计方法3、培养分析和解决实际工程问题的能力4、培养程序设计及调试的能力5、熟悉传输带控制系统的原理及要求实训设备::1、OMRON PLC及模拟实验装置1台2、安装CX-P编程软件的PC机1台3、PC机PLC通讯的RS232电缆线1根实训内容:1、分析工艺过程,明确控制要求(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1 全自动洗衣机控制2、统计I/O点数并选择PLC型号输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。
3、I/O分配表1 全自动洗衣机控制I/O分配表输入输出地址名称地址名称00000 启动系统按钮01000 排水显示灯00001 高水位选择按钮01001 脱水显示灯00002 中水位选择按钮01002 进、出水显示灯00003 低水位选择按钮01003 高水位显示灯00004 排水液位传感器01004 中水位显示灯00005 停止系统按钮01005 低水位显示灯00006 高水位液位传感器01006 电机正转显示灯00007 中水位液位传感器01007 电机反转显示灯00008 低水位液位传感器4、PLC控制程序设计及分析实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
电力系统的matlab-simulink仿真及应用-0142-0186优选全文

I Te Ω PCu 28.7 A 3V1 cos31.5
(4-21)
(2) 按图4-4-11。
第4章 电力系统主要元件等效模型 图4-65 例4.5的仿真电路图
第4章 电力系统主要元件等效模型
表4-11 例4.5仿真电路模块的名称及提取路径
第4章 电力系统主要元件等效模型
电气连接端子(A、B、C)为电机的定子电压输入,可直 接连接三相电压;电气连接端子(a、b、c)为转子电压输出, 一般短接在一起或者连接到其它附加电路中。
通过“电机测量信号分离器”(Machines Measurement Demux)模块可以将输出端子中的各路信号分离出来,典型 接线如图4-61所示。
输出 1-3 4-5 6-7 8-9
10-12 13-14 15-16 17-18
19 20 21
符号 ira,irb,irc id,iq rq,rd Vrq,Vrd isa,isb,isc isd,isq sq,sd Vsq,Vsd m Te m
端口 ir_abc ir_qd phir_qd vr_qd is_abc is_qd phis_qd vs_qd wm Te Thetam
s n1 nn 15001455 0.03
n1
1500
式中,同步转速n1 = 60fn /p = 1500 r/min。
定子额定相电流为
I1
Rs
j X1s
jX m jX m
V1 (Rr Rr(1 s) / s (Rr Rr (1 s) / s
jX1r ) jX1r )
0.458
第4章 电力系统主要元件等效模型 解:(1) 理论分析。采用异步电动机的T形等效电路进 行计算,等效电路如图4-64。图中,Rs + X1s为定子绕组的漏 阻抗;Xm为励磁电抗;+为折算后转子绕组的漏阻抗;s为 转差率。
第10章_MATLAB Simulink仿真软件_例题源程序

第10章 MATLAB Simlllink 仿真软件例10.1 设系统的微分方程为:'12'0.522 etx x tx x -⎧=⎪⎨=⎪⎩ 试建立系统仿真模型。
例10.2 利用Simulink 构建函数曲线y =5t 2+16。
例10.3 利用Simulink 仿真求I =10ln(1)d x x x +⎰。
例10.4 有初始状态为0的二阶微分方程x "+0.2x '+0.4x =0.2u (t ),其中u (t )是单位阶跃函数,试建立系统模型并仿真。
例10.5 PID 控制器是在自动控制中经常使用的模块,在工程应用中其标准的数学模型为)()/11()(s E Ns T s T s T K s U d d i p ++= 其中采用了一阶环节来近似纯微分动作,为保证有良好的微分近似的效果,一般选N ≥10。
试建立PID 控制器的模型并建立子系统。
例10.6 利用使能子系统构成一个正弦半波整流器。
例10.7 利用触发子系统将一锯齿波转换成方波。
例10.8 采用S 函数实现模块y =nx ,即模块的功能是把一个输入信号n 倍以后再输出。
(1) 利用MATLAB 语言编写S 函数。
程序如下:%************************************************* %S 函数timesn.m ,其输出是输入的n 倍%************************************************* function [sys,x0,str,ts]=timesn(t,x,u,flag,n) switch flag,case 0 %初始化[sys,x0,str,ts]=mdlInitializeSizes;case 3 %计算输出量sys=mdlOutputs(t,x,u,n);case {1,2,4,9} %未使用的flag 值sys=[];otherwise %出错处理error(['Unhandle flag=',num2str(flag)]);end%*************************************************%mdlInitializeSizes:当flag为0 时进行整个系统的初始化%*************************************************function [sys,x0,str,ts]=mdlInitializeSizes(T)%调用函数simsizes以创建结构体sizessizes=simsizes;%用初始化信息填充结构体sizessizes.NumContStates=0; %无连续状态sizes.NumDiscStates=0; %无离散状态sizes.NumOutputs=1; %有一个输出量sizes.NumInputs=1; %有一个输入信号sizes.DirFeedthrough=1; %输出量中含有输入量sizes.NumSampleTimes=1; %单个采样周期%根据上面的设置设定系统初始化参数sys=simsizes(sizes);%给其他返回参数赋值。
Matlab Simulink建模与仿真例题源代码
〔實例3.1〕試設計一個模擬低通濾波器,f p = 2400Hz,f s = 5000Hz,R p = 3 dB,R s =25dB。
分別用巴特沃斯和橢圓濾波器原型,求出其3dB 截止頻率和濾波器階數,傳遞函數,並作出幅頻、相頻特性曲線。
巴特沃斯濾波器設計的程序代碼如下:% ch3example1A.mclear;f_p=2400; f_s=5000; R_p=3; R_s=25; % 設計要求指標[n, fn]=buttord(f_p,f_s,R_p,R_s, 's'); % 計算階數和截止頻率Wn=2*pi*fn; % 轉換為角頻率[b,a]=butter(n, Wn, 's'); % 計算H(s)f=0:100:10000; % 計算頻率點和頻率範圍s=j*2*pi*f; % s=jw=j*2*pi*fH_s=polyval(b,s)./polyval(a,s); % 計算相應頻率點處H(s)的值figure(1);subplot(2,1,1); plot(f, 20*log10(abs(H_s))); % 幅頻特性axis([0 10000 -40 1]);xlabel('頻率Hz');ylabel('幅度dB');subplot(2,1,2); plot(f, angle(H_s)); % 相頻特性xlabel('頻率Hz');ylabel('相角rad');figure(2); freqs(b,a); % 也可用指令freqs直接畫出H(s)的頻率響應曲線。
橢圓濾波器設計的程序代碼如下:〔程序代碼〕ch3example1B.m% ch3example1B.mclear;f_p=2400; f_s=5000; R_p=3; R_s=25; % 設計要求指標[n, fn]=ellipord(f_p,f_s,R_p,R_s,'s'); % 計算階數和截止頻率Wn=2*pi*fn; % 轉換為角頻率[b,a]=ellip(n,R_p,R_s,Wn,'s'); % 計算H(s)f=0:100:10000; % 計算頻率點和頻率範圍s=j*2*pi*f; % s=jw=j*2*pi*fH_s=polyval(b,s)./polyval(a,s); % 計算相應頻率點處H(s)的值figure(1);subplot(2,1,1); plot(f, 20*log10(abs(H_s))); % 幅頻特性axis([0 10000 -40 1]);xlabel('頻率Hz');ylabel('幅度dB');subplot(2,1,2); plot(f, angle(H_s)); % 相頻特性xlabel('頻率Hz');ylabel('相角rad');figure(2); freqs(b,a); % 也可用指令freqs直接畫出H(s)的頻率響應曲線。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理一、实训题目:全自动洗衣机控制系统实训目的及要求:1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力2、掌握PLC梯形图的基本设计方法3、培养分析和解决实际工程问题的能力4、培养程序设计及调试的能力5、熟悉传输带控制系统的原理及要求实训设备::1、OMRON PLC及模拟实验装置1台2、安装CX-P编程软件的PC机1台3、PC机PLC通讯的RS232电缆线1根实训内容:1、分析工艺过程,明确控制要求(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1 全自动洗衣机控制2、统计I/O点数并选择PLC型号输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。
3、I/O分配表1 全自动洗衣机控制I/O分配表输入输出地址名称地址名称00000 启动系统按钮01000 排水显示灯00001 高水位选择按钮01001 脱水显示灯00002 中水位选择按钮01002 进、出水显示灯00003 低水位选择按钮01003 高水位显示灯00004 排水液位传感器01004 中水位显示灯00005 停止系统按钮01005 低水位显示灯00006 高水位液位传感器01006 电机正转显示灯00007 中水位液位传感器01007 电机反转显示灯00008 低水位液位传感器4、PLC控制程序设计及分析实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
中间继电器20000为系统总启动。
实现功能:当按下按钮00001,中间继电器20001得电并自锁;当中间继电器20002、20003、20004、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20001掉电。
实现功能:当按下按钮00002,中间继电器20002得电并自锁;当中间继电器20001、20003、20005、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20002掉电。
实现功能:当按下按钮00003,中间继电器20003得电并自锁;当中间继电器20001、20002、20006、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20003掉电。
实现功能:当按下按钮00006且01002为ON时,中间继电器20004得电并自锁;当中间继电器20002、20003、20005、20006任意一个为ON,或按下停止按钮00005,或计数器CNT005为ON时,中间继电器20004掉电。
实现功能:当按下按钮00007且01002为ON时,中间继电器20005得电并自锁;当中间继电器20001、20003、20004、20006任意一个为ON,或按下停止按钮00005,或计数器CNT005为ON时,中间继电器20005掉电。
实现功能:当按下按钮00008且01002为ON时,中间继电器20006得电并自锁;当中间继电器20001、20002、20004、20005任意一个为ON,或按下停止按钮00005,或计数器CNT005为ON时,中间继电器20004掉电。
实现功能:当中间继电器20004、20005、20006中任意一个为ON时,定时器TIM000开始定时,2秒后定时时间到,TIM000为ON;当中间继电器20004、20005、20006都为OFF时,定时器TIM000掉电。
实现功能:当定时器TIM000为ON且中间继电器20008和定时器TIM004为OFF 时,中间继电器20007为ON,同时定时器TIM001、TIM002、TIM003、TIM004开始定时,30秒后定时器TIM001定时时间到(即TIM001为ON),再过2秒定时器TIM002定时时间到(即TIM002为ON),当TIM002为ON后再过30秒定时器TIM003定时时间到(即TIM003为ON),之后再过2秒定时器TIM004定时时间到(即TIM004为ON);定时器TIM004为ON时,中间继电器20007、定时器TIM001、TIM002、TIM003、TIM004同时掉电,之后进行下一次循环。
当定时器TIM000为OFF或中间继电器20008为ON时,中间继电器20007、定时器TIM001、TIM002、TIM003、TIM004同时掉电。
实现功能:当系统一上电,特殊继电器25315在第一个周期内导通为ON,计数器CNT005自动复位为OFF,当前值恢复为#5,当定时器TIM004为ON时,计数器CNT005计数一次,当计数满设定值时,其输出为ON且保持,当灯01001为ON或停止按钮00005为ON时,计数器CNT005自动复位为OFF。
实现功能:当按下按钮00004且灯01000为ON时,中间继电器20008得电并自锁且定时器TIM006开始定时,定时30秒后,定时器TIM006为ON;TIM006常闭触点为OFF,中间继电器20008和定时器TIM006掉电。
实现功能:当中间继电器20001为ON且中间继电器20004为OFF,或中间继电器20002为ON且中间继电器20005为OFF,或中间继电器20003为ON且中间继电器20006为OFF,这三种情况中的任意一种实现时,灯01002为ON;其他状态时,灯01002为OFF。
实现功能:当中间继电器20001为ON时,灯01003为ON;当中间继电器20001为OFF时,灯01003为OFF。
实现功能:当中间继电器20002为ON时,灯01004为ON;当中间继电器20002为OFF时,灯01004为OFF。
实现功能:当中间继电器20003为ON时,灯01005为ON;当中间继电器20003为OFF时,灯01005为OFF。
实现功能:当中间继电器20007为ON且定时器TIM001为OFF时,灯01006为ON;当中间继电器20007为OFF或定时器TIM001为ON时,灯01006为OFF。
实现功能:当定时器TIM002为ON且定时器TIM003为OFF时,灯01007为ON;当定时器TIM002为OFF或定时器TIM003为ON时,灯01007为OFF。
实现功能:当计数器CNT005为ON且中间继电器20008和灯01001为OFF时,灯01000为ON;当计数器CNT005为OFF或中间继电器20008为ON或灯01001为ON时,灯01000为OFF。
实现功能:当中间继电器20008为ON时,灯01001为ON;当中间继电器20008为OFF 时,灯01001为OFF。
图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析)对动平台4:受力分析如图4图4动平台4的受力分析对并联杆2:受力分析如图5图5并联杆2的受力分析 对直线电机滑块1:受力分析如图6图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析 二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R1+R2=R3+R4将上述矢量方程分解为x和y方向,并分别对方程两边对时间t求两次导数得:r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12)r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13)三)质心加速度的矢量方程矢量关系:Ac3=Rc3_dot_dotAc4=R3_dot_dot+ Rc4_dot_dotAc2=R3_dot_dot+ R4_dot_dot+ Rc2_dot_dot(_dot_dot表示对时间求两次导数)将上述三个矢量方程分别分解为x和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm引入的加速度有:α2,α3,r1_dot_dot ,Ac3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式101000000000020001010000000000200002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----3000000001010000000030000003333000003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅0033000010000000000000330000010000000000003300001rc C r S r C ⎛⎫⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα∙∙⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。