透视投影(Perspective Projection)变换推导
摄影测量课件02-中心投影的基本知识和透视变换1
主垂线(SN)
像水平线(2)
kR
t
KW
VN
k
t
T
二、透视变换
2、透视变换中的特别点、线、面 (Especial Points、Lines、Planes )
特殊点(9): 像主点(o)地主点(O) 像底点(n)地底点(N)
主横线(hoho) 等比线(hchc)
主灭点(K) 主迹点(V) 主合点(i)
基本要素(S、P、T)
(1)特殊面(3):
主垂面(W) 合面(G) 遁面(R)
R W
G S
P T
二、透视变换
2、透视变换中的特别点、线、面 (Especial Points、Lines、Planes )
特殊线(8):
透视轴(tt)
基本方向线(VV)
主纵线(vv)
g
合线(gg)
G S
i
灭线(kk)
Pg
二、透视变换
思 1、为什么摄影像片是地面的中心投影?
2、试分析中心投影的主要特征。
考
3、什么是像主点、像底点、主合点、主灭点?
题 4、证明主垂面内的主要几何关系。
5、用透视作图方法求点、线和高于地面点的像。
预
共线条件方程
习
点的平面上作对应的像 a
主合点
S T
v
T1
迹点
T
P i
a v
AE
作图步骤:
1)找迹点T1 2)找主合点i 3)连T1i与SA,
交点为a
二、透视作图 线的透视作图
已知 E 平面上有 AB 直线,在像平面上作对应的像 ab
主合点
P
v
迹点
S
T
投影转换公式范文

投影转换公式范文投影转换的目的是将三维物体的形状、尺寸、方向等信息映射到二维平面上,以便于在计算机屏幕上显示或进行进一步处理。
其中最常用的投影转换有透视投影和平行投影两种。
透视投影是模拟人眼看到的投影效果。
当物体离观察者比较近时,离观察者越近的物体映射到平面上的尺寸越大;当物体离观察者比较远时,离观察者越远的物体映射到平面上的尺寸越小。
透视投影的数学表达式如下:```x'=(x*f)/(z+d)y'=(y*f)/(z+d)```其中,(x,y,z)是三维物体上的一个点,(x',y')是其在二维平面上的投影点,f是焦距,d是观察者到投影平面的距离。
平行投影是保持物体的形状和尺寸不变,将其映射到平行于观察视线的平面上。
平行投影的数学表达式如下:```x' = x + dxy' = y + dy```其中,(x, y, z)是三维物体上的一个点,(x', y')是其在二维平面上的投影点,dx和dy是投影平面的偏移量,用于控制投影的位置。
除了透视投影和平行投影,还有其他各种形式的投影转换公式。
比如等角投影、斜投影、正射投影等等。
不同的投影转换公式适用于不同的应用场景和需求。
在计算机图形学中,投影转换通常是在视景体的局部坐标系中进行的。
视景体是一个六面体,用于限定需要显示的物体范围。
常见的视景体包括矩形视景体、正交视景体、透视视景体等。
在进行投影转换时,需要将三维物体先从局部坐标系转换到世界坐标系,然后再进行投影转换到二维平面上。
投影转换还涉及到一些常见的问题和技巧,比如消失点的计算、背面剔除、深度缓冲等。
这些问题和技巧都是为了提高投影转换的效果和速度,使得二维平面上的投影能够尽可能地还原出三维物体的形状和尺寸。
总结起来,投影转换公式是将三维空间中的点映射到二维平面上的数学公式。
不同的投影转换公式适用于不同的应用场景和需求。
投影转换涉及到视景体、局部坐标系、世界坐标系等概念。
CG透视变换推导汇总

透视投影是3D固定流水线的重要组成部分,是将相机空间中的点从视锥体(frustum)变换到规则观察体(Canonical View Volume)中,待裁剪完毕后进行透视除法的行为。
在算法中它是通过透视矩阵乘法和透视除法两步完成的。
透视投影变换是令很多刚刚进入3D图形领域的开发人员感到迷惑乃至神秘的一个图形技术。
其中的理解困难在于步骤繁琐,对一些基础知识过分依赖,一旦对它们中的任何地方感到陌生,立刻导致理解停止不前。
没错,主流的3D APIs如OpenGL、D3D的确把具体的透视投影细节封装起来,比如gluPerspective(…) 就可以根据输入生成一个透视投影矩阵。
而且在大多数情况下不需要了解具体的内幕算法也可以完成任务。
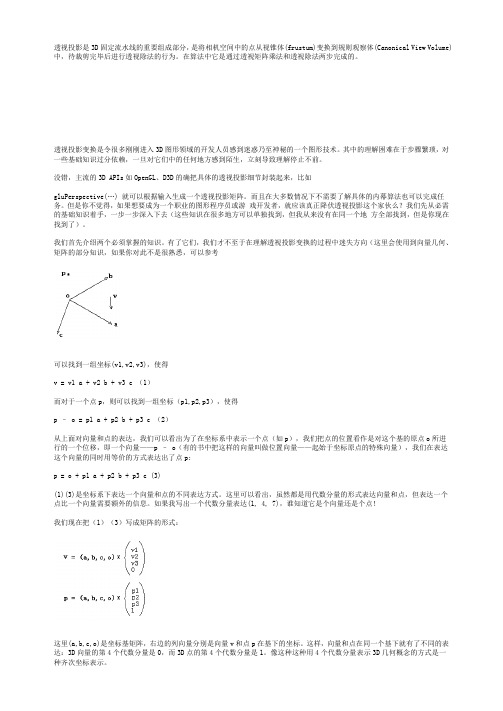
但是你不觉得,如果想要成为一个职业的图形程序员或游戏开发者,就应该真正降伏透视投影这个家伙么?我们先从必需的基础知识着手,一步一步深入下去(这些知识在很多地方可以单独找到,但我从来没有在同一个地方全部找到,但是你现在找到了)。
我们首先介绍两个必须掌握的知识。
有了它们,我们才不至于在理解透视投影变换的过程中迷失方向(这里会使用到向量几何、矩阵的部分知识,如果你对此不是很熟悉,可以参考可以找到一组坐标(v1,v2,v3),使得v = v1 a + v2 b + v3 c (1)而对于一个点p,则可以找到一组坐标(p1,p2,p3),使得p – o = p1 a + p2 b + p3 c (2)从上面对向量和点的表达,我们可以看出为了在坐标系中表示一个点(如p),我们把点的位置看作是对这个基的原点o所进行的一个位移,即一个向量——p – o(有的书中把这样的向量叫做位置向量——起始于坐标原点的特殊向量),我们在表达这个向量的同时用等价的方式表达出了点p:p = o + p1 a + p2 b + p3 c (3)(1)(3)是坐标系下表达一个向量和点的不同表达方式。
这里可以看出,虽然都是用代数分量的形式表达向量和点,但表达一个点比一个向量需要额外的信息。
三种2D-3D定位算法(摄像机定标)

《2D-3D 定位算法》笔记中英对照:世界坐标系或实体坐标系(3D):object coordinate system 。
摄像机坐标系(3D): camera coordinate system 。
图像坐标系(2D): image coordinate system ,在摄像机坐标系下取x 和y 坐标即为图像坐标系。
2D-3D 点对:2D-3D correspondences ,根据投影变换将3D 点投影为2D 点。
平移变换:translation projection 旋转变换:rotation projection 比例变换:scale projection透视投影变换:perspective projection 正交投影变换:orthographic projection2D-3D 定位算法:根据 已给出的若干对 3D 点p i (在世界坐标系或实体坐标系下)和 相对应的 2D 点p i '(在图像坐标系下或在摄像机坐标系下取x 和y 坐标),求出之间的投影变换矩阵(旋转变换和平移变换)。
文献1:《A Comparison of 2D-3D Pose Estimation Methods 》 文献2:《A Comparison of Iterative 2D-3D Pose Estimation Methods for Real-Time Applications 》 文献3:《计算机视觉》-马颂德一、CamPoseCalib(CPC)1、基本思想:根据非线性最小二乘法,最小化重投影误差求出投影参数),,,,,(γβαθθθθθθθz y x =。
2、算法过程:(1)已给出若干点对)'~,(i i p p ,其中i p 是实体坐标系下的3D 点,'~i p 我理解为事先给出的图像坐标系下的2D 点,应该是给出的测量值 。
(2)将i p 先经过旋转变换 i z y x p R R R ⋅⋅⋅)()()(γβαθθθ 和平移变换 Tz y x ),,(θθθ ,得到摄像机坐标系下的点i z y x Tz y x i p R R R p m ⋅⋅⋅+=)()()(),,(),(γβαθθθθθθθ 。
AE图层透视变换教程

AE图层透视变换教程在使用Adobe After Effects(AE)软件创建动画或合成视频时,我们经常需要对图层进行透视变换来创建逼真的三维效果。
透视变换可以帮助我们实现图层在3D空间中的形变,使得图层能够呈现出深度感和逼真的效果。
本教程将向您介绍如何在AE中实现图层的透视变换。
首先,确保您已经导入需要进行透视变换的图层。
选择图层后,在“效果”菜单下找到“变换”选项,并展开其子菜单。
在子菜单中,选择“透视”效果。
启用“透视”效果后,您将看到一个调整视角和投影平面的界面。
通过拖动滑块和调整参数,您可以控制图层在3D空间中的形变。
下面是一些常用的参数和操作:1. 视角(Perspective):调节此参数可以改变摄像机视角的大小。
较小的值会使视角变窄,产生更深的透视效果;较大的值会使视角变广,形成更浅的透视效果。
2. 投影(Projection):此参数用于调节摄像机的投影类型。
可以选择使用正交投影(Orthographic)或透视投影(Perspective)。
3. 焦距(Focal Length):该参数用于调整摄像机的焦距。
较小的值会使焦点距离图层更远,创建更明显的透视效果;较大的值会使焦点距离图层更近,产生更浅的透视效果。
4. 天顶角(Ceiling Angle)和地板角(Floor Angle):通过调整这两个参数,您可以在3D空间中设置一个天花板和地板,以调整图层的透视效果。
5. 附加参数:此部分包含其他一些参数,如图层的位置、旋转和缩放等,可用于进一步调整图层在透视中的表现形式。
通过调整以上参数,您可以根据需求定制图层的透视效果。
请注意,不同的图层可能需要不同的参数组合,以达到最佳效果。
此外,您还可以使用AE中的摄像机工具进一步操控图层的透视变换。
选择图层后,在“工具”栏中找到“摄像机工具”。
使用摄像机工具,您可以通过拖动和旋转视图来调整图层在3D空间中的位置和角度。
最后,如果您需要将多个图层放置在同一个透视空间中,可以使用“Null对象”来帮助您管理和操控图层。
计算机图形学中的透视变换算法研究
计算机图形学中的透视变换算法研究计算机图形学是一门应用广泛且发展迅速的学科,其中透视变换算法是其中的重要内容之一。
透视变换算法是用于将三维场景投影到二维平面上的一种技术,可以用于制作三维建模、游戏开发、虚拟现实等诸多场景。
本文将对透视变换算法进行深入探讨。
一、透视变换的基本原理透视变换是一种投影变换,实际上是将原本三维的场景投影到一个二维平面上,使得相机所看到的场景保持透视关系。
我们以一个简单的场景为例,来说明透视变换的基本原理。
图一:一个简单的场景如图一所示,我们需要将这个三维场景投影到一个平面上。
我们假设相机位置在(0,0,0),相机朝向为Z轴正方向。
首先,我们需要将相机坐标系转换为世界坐标系。
我们可以通过相机的位置、视线方向、以及上方向来得到相机坐标系的X、Y、Z轴方向向量,进而得到相机矩阵(Camera Matrix)。
接下来,我们需要将物体坐标系转换为相机坐标系。
我们可以通过将物体的顶点坐标乘以一个变换矩阵(Model Matrix),将物体从模型空间转换到世界空间,然后将其乘以相机矩阵,将其从世界空间转换到相机空间。
最后,我们对相机空间中的坐标进行透视变换,得到最终的图像。
透视变换的过程如下:(1) 将相机空间中的坐标投影到相机平面上。
这一步称作投影变换(Projection transformation),通常使用投影矩阵(Projection Matrix)来实现。
(2) 对投影后的坐标进行归一化(Normalization)处理,使得所有坐标的Z值都等于1。
(3) 将归一化后的坐标变换到屏幕空间(Screen Space)。
屏幕空间是二维的,并且以屏幕左上角为原点,以屏幕右下角为坐标系的正方向。
这一步通常使用视口变换(Viewport Transformation)来实现。
二、透视变换算法的具体实现透视变换算法是计算机图形学中的重要内容之一,其核心在于将三维场景转换为二维图像。
透视投影(Perspective_Projection)变换推导
透视投影是3D固定流水线的重要组成部分,是将相机空间中的点从视锥体(frustum)变换到规则观察体(Canonical View Volume)中,待裁剪完毕后进行透视除法的行为。
在算法中它是通过透视矩阵乘法和透视除法两步完成的。
透视投影变换是令很多刚刚进入3D图形领域的开发人员感到迷惑乃至神秘的一个图形技术。
其中的理解困难在于步骤繁琐,对一些基础知识过分依赖,一旦对它们中的任何地方感到陌生,立刻导致理解停止不前。
没错,主流的3D APIs如OpenGL、D3D的确把具体的透视投影细节封装起来,比如gluPerspective(…) 就可以根据输入生成一个透视投影矩阵。
而且在大多数情况下不需要了解具体的内幕算法也可以完成任务。
但是你不觉得,如果想要成为一个职业的图形程序员或游戏开发者,就应该真正降伏透视投影这个家伙么?我们先从必需的基础知识着手,一步一步深入下去(这些知识在很多地方可以单独找到,但我从来没有在同一个地方全部找到,但是你现在找到了)。
我们首先介绍两个必须掌握的知识。
有了它们,我们才不至于在理解透视投影变换的过程中迷失方向(这里会使用到向量几何、矩阵的部分知识,如果你对此不是很熟悉,可以参考可以找到一组坐标(v1,v2,v3),使得v = v1 a + v2 b + v3 c (1)而对于一个点p,则可以找到一组坐标(p1,p2,p3),使得p – o = p1 a + p2 b + p3 c (2)从上面对向量和点的表达,我们可以看出为了在坐标系中表示一个点(如p),我们把点的位置看作是对这个基的原点o所进行的一个位移,即一个向量——p – o(有的书中把这样的向量叫做位置向量——起始于坐标原点的特殊向量),我们在表达这个向量的同时用等价的方式表达出了点p:p = o + p1 a + p2 b + p3 c (3)(1)(3)是坐标系下表达一个向量和点的不同表达方式。
这里可以看出,虽然都是用代数分量的形式表达向量和点,但表达一个点比一个向量需要额外的信息。
深度探讨透视投影坐标系
3d图形程序,就一定会做坐标变换.而谈到坐标变换,就不得不提起投影变换,因为它是所有变换中最不容易弄懂的。
但有趣的是,各种关于透视变换的文档却依然是简之又简,甚至还有前后矛盾的地方。
看来如此这般光景,想要弄清楚它,非得自己动手不可了。
所以在下面的文章里,作者尝试推导一遍这个难缠的透视变换,然后把它套用到DX和PS2lib 的实例中去。
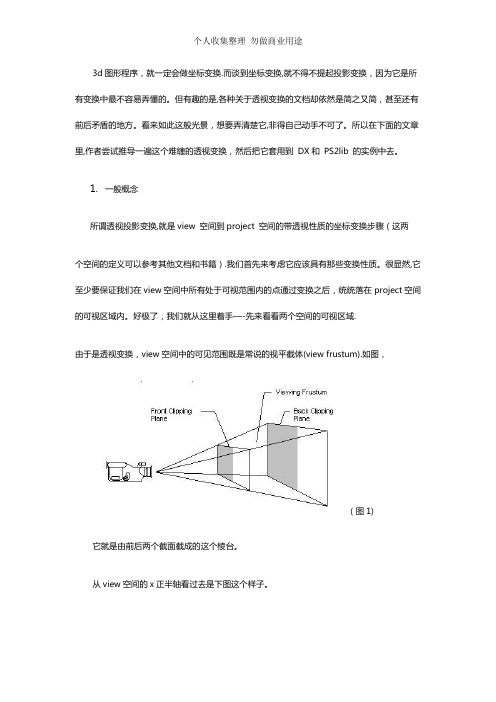
1.一般概念所谓透视投影变换,就是view 空间到project 空间的带透视性质的坐标变换步骤(这两个空间的定义可以参考其他文档和书籍).我们首先来考虑它应该具有那些变换性质。
很显然,它至少要保证我们在view空间中所有处于可视范围内的点通过变换之后,统统落在project空间的可视区域内。
好极了,我们就从这里着手—-先来看看两个空间的可视区域.由于是透视变换,view空间中的可见范围既是常说的视平截体(view frustum).如图,(图1)它就是由前后两个截面截成的这个棱台。
从view空间的x正半轴看过去是下图这个样子。
(图2)接下来是project空间的可视范围。
这个空间应当是处于你所见到的屏幕上。
实际上将屏幕表面视作project空间的xoy平面,再加一条垂直屏幕向里(或向外)的z轴(这取决于你的坐标系是左手系还是右手系),这样就构成了我们想要的坐标系。
好了,现在我们可以用视口(view port)的大小来描述这个可视范围了.比如说全屏幕640*480的分辨率,原点在屏幕中心,那我们得到的可视区域为一个长方体,它如下图(a)所示。
(图3)但是,这样会带来一些设备相关性而分散我们的注意力,所以不妨先向DirectX文档学学,将project空间的可视范围定义为x∈[—1,1], y∈[-1,1],z∈[0,1]的一个立方体(上图b)。
这实际上可看作一个中间坐标系,从这个坐标系到上面我们由视口得出的坐标系,只需要对三个轴向做一些放缩和平移操作即可。
另外,这个project坐标系对clip操作来说,也是比较方便的。
透视和透视投影变换
透视和透视投影变换——论图形变换和投影的若干问题之三何援军(上海交通大学计算机科学与工程系,上海,200030)摘要:讨论了透视变换的基本原理:由于与画面成一角度的平行线簇经透视变换后交于灭点,可采用两种不同的方法来获得透视图:一是保持画面铅垂而通过旋转物体使之与画面构成角度达到透视变换效果,得到了3种最佳透视变换矩阵;二是通过倾斜投影画面而达到透视变换效果,给出了通过倾斜画面得到三灭点透视图的齐次透视变换矩阵。
两种方法的灭点都是可预先控制(即可先决定灭点再决定变换矩阵),比较彻底的解决了透视变换的生成理论。
给出了“对一个空间物体,一定存在另一个空间物体,使前者在画面上的透视投影与后者的平行投影是一样的,且保留了深度方向的对应关系”的一个证明。
这个性质可使复杂的透视投影转化成简单的平行投影,使得立体图形的处理大为简化。
关键词:透视变换,齐次变换矩阵,CG中图法分类号:TP391Perspective and its Projection TransformationHe Yuanjun(Department of Computer Science and Engineering,Shanghai Jiaotong University, Shanghai 200030,China)Abstract: Basic principles of perspective transformation are discussed. Based on the fact that parallel-lines in some angle with view plane intersect at vanishing-point, two methods are presented to get perspective view: one is to keep the view plane vertical while rotating objects to some angle, thus to achieve perspective transformation effect, and three best perspective transformation matrixes is presented. The other is to incline projective view to get the effect. Homogenous perspective transformation matrix are present, which can generate 3-vanishing-point drawing through inclining view. Both methods are beforehand controllable (that’s to say vanishing-point is first decided, then comes out the transformation matrix), thus generating theory of perspective transformation is thoroughly solved. Prove that for each 3D object there must be another 3D object, which parallel projection is the same as the former’s perspective projection, and the corresponding depth relation is well preserved. With this useful property, a complicated perspective projection can be converted to a simple parallel projection, so the complication of 3D graphics processing becomes sharply reduced.Keywords: perspective transformation, homogenous transformation matrix, CG1.引言现实生活中的景物,由于观察距离及方位不同在视觉上会引起不同的反映,这种现象就是透视现象。
透视投影的原理和实现

透视投影的原理和实现by Goncely摘要:透视投影是3D渲染的基本概念,也是3D程序设计的基础。
掌握透视投影的原理对于深入理解其他3D渲染管线具有重要作用。
本文详细介绍了透视投影的原理和算法实现,包括透视投影的标准模型、一般模型和屏幕坐标变换等,并通过VC实现了一个演示程序。
1 概述在计算机三维图像中,投影可以看作是一种将三维坐标变换为二维坐标的方法,常用到的有正交投影和透视投影。
正交投影多用于三维健模,透视投影则由于和人的视觉系统相似,多用于在二维平面中对三维世界的呈现。
透视投影(PerspectiveProjection)是为了获得接近真实三维物体的视觉效果而在二维的纸或者画布平面上绘图或者渲染的一种方法,也称为透视图[1]。
它具有消失感、距离感、相同大小的形体呈现出有规律的变化等一系列的透视特性,能逼真地反映形体的空间形象。
透视投影通常用于动画、视觉仿真以及其它许多具有真实性反映的方面。
2 透视投影的原理基本的透视投影模型由视点E和视平面P两部分构成(要求E不在平面P上)。
视点可以认为是观察者的位置,也是观察三维世界的角度。
视平面就是渲染三维对象透视图的二维平面。
如图1所示。
对于世界中的任一点X,构造一条起点为E并经过X点的射线R,R与平面P的交点Xp即是X点的透视投影结果。
三维世界的物体可以看作是由点集合 { Xi} 构成的,这样依次构造起点为E,并经过点Xi的射线Ri,这些射线与视平面P的交点集合便是三维世界在当前视点的透视图,如图2所示。
图1透视投影的基本模型[2]图2透视图成像原理[6]基本透视投影模型对视点E的位置和视平面P的大小都没有限制,只要视点不在视平面上即可。
P无限大只适用于理论分析,实际情况总是限定P为一定大小的矩形平面,透视结果位于P之外的透视结果将被裁减。
可以想象视平面为透明的玻璃窗,视点为玻璃窗前的观察者,观察者透过玻璃窗看到的外部世界,便等同于外部世界在玻璃窗上的透视投影(总感觉不是很恰当,但想不出更好的比喻了)。
透视投影变换的推导过程-3D基础知识

透视投影变换的推导过程-3D基础知识感觉很多书上都没讲清楚透视投影变换的推导过程,自己推导了下,以前一直含糊的关于方形/非方形的视平面和屏幕的宽高比的问题也有了答案.本文组织如下:1.相机空间到视平面的变换2.视平面到屏幕的变换3.综合4.一般情形1.相机空间到视平面的变换* p (xc,0, zc)/ |/ |/ |X |/ |^ *p |(xp,0,zp)| / | || / | || / | |C(cam) |/ | |--------*----|----*------------->Z0 dx zc(X-Z平面的投影示图)a.透视投影一般的视景体为棱台,相机空间的物体会投影到视平面z=d,这里考虑左手坐标系,矩阵使用行优先方式。
如图所示,由相似三角形知识可知相机空间中的物体投影到视平面上的坐标为:xp = xc*(dx/zc)yp = yc*(dy/zc)其中,xc,yc,zc为相机空间坐标,xp,yp,zp为视平面坐标,dx,dy为x,y轴向的视距view distance,视平面到camera的距离,故相机空间投影到视平面上的矩阵Tcp为:|dx 0 0 0 ||0 dy 0 0 ||0 0 1 1 ||0 0 0 0 |(验证:T cp右乘点p(xc,yc,zc,1)得点p (xc*dx, yc*dy, zc, zc),转换为3D坐标为(xc*dx/zc, yc*dy/zc, 1),正确。
)*************************************************************** *****注:因为转换过程中点使用的是4D齐次坐标,所以最后需转换为3D坐标。
4D齐次坐标(x,y,z,w)转换为3D坐标的方法为除以w分量,即对应3D坐标为(x/w,y/w,z/w)。
*************************************************************** *****考虑dx/zc和dy/zc项,如果dx != dy,则投影后x,y的比例会发生变化(原因:投影前坐标比例为xc/yc,投影后为xp/yp = xc*(dx/zc)/yc*(dy/zc) = xc*dx/yc*dy),从而投影后的图像的x,y比例会发生变形。
透视投影的详细解释(转载)

透视投影的详细解释(转载)本⽂乃<投影矩阵的推导>译⽂,原⽂地址为:译者: 流星上的潴如需转载,请注明出处,感谢!在3D图形程序的基本矩阵变换中,投影矩阵是其中⽐较复杂的。
平移和缩放浏览⼀下就能理解,旋转矩阵只要掌握了三⾓函数知识也可以理解,但投影矩阵有点棘⼿。
如果你曾经看过投影矩阵,你会发现你的常识不⾜以告诉你它是怎么来的。
⽽且,我在⽹上还未看到许多关于如何推导投影矩阵的教程资源。
本⽂的话题就是如何推导投影矩阵。
对于刚刚开始接触3D图形的⼈,我应该指出,理解投影矩阵如何推导可能是我们对于数学的好奇⼼,它不是必须的。
你可以只⽤公式,并且如果你⽤像Direct3D那样的图形API,你甚⾄都不需要使⽤公式,图形API会为你构建⼀个投影矩阵。
所以,如果本⽂看起来有点难,不要害怕。
只要你理解了投影矩阵做了什么,你没必要在你不想的情况下关注它是怎么做的。
本⽂是给那些想了解更多的程序员的。
概述: 什么是投影?计算机显⽰器是⼀个⼆维表⾯,所以如果你想显⽰三维图像,你需要⼀种⽅法把3D⼏何体转换成⼀种可作为⼆维图像渲染的形式。
那也正是投影做的。
拿⼀个简单的例⼦来说,⼀种把3D对象投影到2D表⾯的⽅法是简单的把每个坐标点的z坐标丢弃。
对⽴⽅体来说,看上去可能像图1:图1: 通过丢弃Z坐标投影到XY平⾯当然,这过于简单,并且在⼤多数情况下不是特别有⽤。
⾸先,根本不会投影到⼀个平⾯上;相反,投影公式将变换你的⼏何体到⼀个新的空间体中,称为规范视域体(canonical view volume),规范视域体的精确坐标可能在不同的图形API之间互不相同,但作为讨论起见,把它认为是从(-1, -1, 0)延伸⾄(1, 1, 1)的盒⼦,这也是Direct3D中使⽤的。
⼀旦所有顶点被映射到规范视域体,只有它们的x和y坐标被⽤于映射到屏幕上。
这并不代表z坐标是⽆⽤的,它通常被深度缓冲⽤于可见度测试。
这就是为什么变换到⼀个新的空间体中,⽽不是投影到⼀个平⾯上。
D3D,OPENGL视点变换矩阵,投影矩阵(clip space)的推导过程
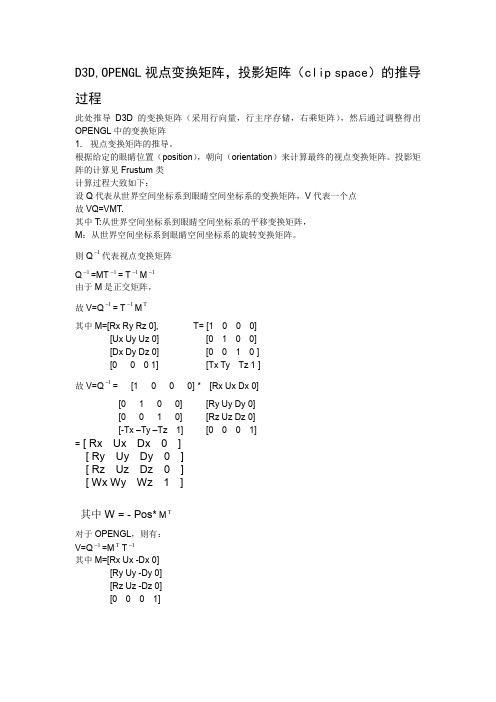
D3D,OPENGL视点变换矩阵,投影矩阵(clip space)的推导过程此处推导D3D的变换矩阵(采用行向量,行主序存储,右乘矩阵),然后通过调整得出OPENGL中的变换矩阵1. 视点变换矩阵的推导。
根据给定的眼睛位置(position),朝向(orientation)来计算最终的视点变换矩阵。
投影矩阵的计算见Frustum类计算过程大致如下:设Q代表从世界空间坐标系到眼睛空间坐标系的变换矩阵,V代表一个点故VQ=VMT.其中T:从世界空间坐标系到眼睛空间坐标系的平移变换矩阵,M:从世界空间坐标系到眼睛空间坐标系的旋转变换矩阵。
则Q1-代表视点变换矩阵Q1-=MT1-= T1-M1-由于M是正交矩阵,故V=Q1-= T1-M T其中M=[Rx Ry Rz 0], T= [1 0 0 0][Ux Uy Uz 0] [0 1 0 0][Dx Dy Dz 0] [0 0 1 0 ][0 0 0 1] [Tx Ty Tz 1 ]故V=Q1-= [1 0 0 0] * [Rx Ux Dx 0][0 1 0 0] [Ry Uy Dy 0][0 0 1 0] [Rz Uz Dz 0][-Tx –Ty –Tz 1] [0 0 0 1]= [ Rx Ux Dx 0 ][ Ry Uy Dy 0 ][ Rz Uz Dz 0 ][ Wx Wy Wz 1 ]其中W = - Pos* M T对于OPENGL,则有:V=Q1-=M T T1-其中M=[Rx Ux -Dx 0][Ry Uy -Dy 0][Rz Uz -Dz 0][0 0 0 1]T= [1 0 0 Tx][ 0 1 0 Ty][0 0 1 Tz][0 0 0 1 ]故V=Q1 =[Rx Ry Rz Wx][Ux Uy Uz Wy][-Dx –Dy –Dz Wz][0 0 0 1]其中W = -M T* Pos2. 透视投影(perspective projection)矩阵的推导假设(X,Y,Z,1)为一个点,投影后的点为(Xp,Yp,Zp,1)则根据相似三角形原理,有:Xp/X=Yp/Y=N/Z所以:Xp=N*X/ZYp=N*Y/ZZp=N故投影变换可以表示为齐次坐标形式:(Xp,Yp,Zp,1)=(X,Y,Z,Z/N)对于X和Y :在进行上一步变换后,还要进一步做裁剪变换,即将投影后的坐标映射为[-1,1].即:(X*N/Z,Y*N/Z) : ([l,r],[b,t]) ([-1,1],[-1,1])即:(X*N/Z-l)/(r-l)=(s+1)/2由此可以得到:对于Z,变换稍微复杂一些。
透视投影变换过程归纳及代码

成像的过程实质上是几个坐标系的转换。
首先空间中的一点由世界坐标系转换到摄像机坐标系,然后再将其投影到成像平面(图像物理坐标系),最后再将成像平面上的数据转换到图像平面(图像像素坐标系)。
1透视投影公式
1.1世界坐标系转摄像机坐标系
公式如下:
其中,R为旋转矩阵,T为平移矩阵,右侧矩阵是世界坐标系坐标点,左侧是摄像机坐标系坐标点。
R旋转矩阵表示的是摄像机在世界坐标系中绕X,Y,Z旋转的程度,平移矩阵表示的是摄像机在世界坐标系中里世界坐标原点的程度。
R矩阵为3*3的正交矩阵,T为3*1的矩阵。
绕x,y, z轴旋转的矩阵分别如下:
1.2 摄像机坐标系转图像物理坐标系公式如下:
f是焦距
1.3图像物理坐标系转图像像素坐标系
公式如下:
每个像素沿x轴的实际物理尺寸大小是dx,沿y轴的实际物理尺寸大小是dy,单位值毫米。
图像物理坐标系原点在图像像素坐标系中记为(u0,v0)
2.代码
3.逆映射相关
逆映射是将图像像素坐标系坐标点,提供已知的内外参数逆映射到真实世界坐标点。
3.1 像素坐标系到物理坐标系
internalMatrix是相机内参数,取其逆矩阵与像素坐标点相乘,得物理坐标点。
3.2 物理坐标到摄像机坐标
先求得焦距的矩阵,取其逆矩阵与物理坐标点相乘,再乘以缩放因子即可得摄像机坐标点(缩放因子目前不知,暂时全部设为250)3.3 摄像机坐标到真实坐标点
先求得旋转矩阵和平移矩阵,合并两个矩阵之后,取其逆矩阵,让该
逆矩阵与摄像机坐标点相乘,即可得真实世界坐标点。
投影转换名词解释
投影转换名词解释
投影转换 (Projection Conversion) 是指将一种投影方式转换为另一种投影方式。
在数字图像处理领域中,投影转换通常用于将图像从一种投影方式转换为另一种投影方式,以便于后续的图像处理和分析。
常见的投影转换包括:
1. 透视投影 (Perspective Projection):透视投影是一种将三维场景二维化的方法,它通过将视角对准场景的中心点,并将视角周围的物体向内压缩,以实现二维图像的生成。
2. 正交投影 (Orthographic Projection):正交投影是一种用
于绘制二维图像的方法,它通过将场景分解成水平和垂直两个方向,并分别投影到平面上,以实现图像的生成。
3. 透视投影反转 (Perspective Projection Inversion):透视投影反转是一种将透视投影的图像转换为相机视角的方法,它通过将视角周围的物体向外扩展,以实现图像的还原。
4. 等距投影 (Isolating Projection):等距投影是一种用于绘制等距线图的方法,它通过将线段连接成等距曲线,以实现图像的生成。
以上是投影转换的一些常见方法,它们在数字图像处理领域中具有广泛的应用。
透视投影的坐标转换与数学推导

透视投影的坐标转换与数学推导坐标转换管线在处理顶点数据时需要经过多个坐标系的转换。
1.通过model与view矩阵先将其变换到世界坐标系中,再将其变换到观察坐标系中。
从⽽⽅便后续处理。
2.经透射投影,将3D坐标映射到视平⾯,完成从3D到2D的变换,从⽽在后续可转换为在屏幕显⽰的2D坐标。
3.透射投影将顶点转换到了单位⽴⽅体中,变换到标准化设备坐标系。
4.⽽标准化设备坐标系中的物体常常会产⽣形变,为恢复物体原⽐例,将其进⾏视⼝变换,转换到最后显⽰的屏幕坐标系中。
以上为顶点在坐标转换中的⼤致流程,其中包含的很多细节部分会在下⾯结合透射投影进⾏详细分析。
逻辑分析图 1 图 2 图 3 图41.转换:我们输⼊在程序中的坐标都是3D,⽽最终显⽰在屏幕上的只能是2D。
所以可想⽽知,需要⼀个过程来将3D坐标映射到我们的2D视平⾯上。
只有这样我们才能通过显⽰器去观看。
2.观察:如上述图1,我们在观察⾯上所观察到的正是观察点E与物体实际坐标的连线在视平⾯P上的交点,其⽐例也可形成近⼤远⼩的现实感。
图2可直观的感受。
3.问题:根据学过的知识,显然这⼀交点可以很轻松的通过相似三⾓形来求得。
但问题是,我们需要获得多⼤范围内的物体?即限定观察空间。
不在观察空间内的物体⼜该怎样去处理?即裁剪。
4.观察空间:设定近平⾯,远平⾯,和观察⾓度,来得到⼀个视椎体(frustum)。
⽽我们也常常将近平⾯作为视平⾯。
如图3。
5.裁剪:裁剪掉视锥体以外的顶点,只保留以内的。
若直接对视锥体裁剪,因平⾯的倾斜也会导致计算量过⼤,所以采⽤将其映射到单位⽴⽅体中(CVV),此时都为垂直平⾯,并且在映射过程中,顶点与视锥体的关系不变,在视锥体外的仍然在视锥体外。
裁剪时只需判定⼀个坐标即可,⼤⼤减少了计算量。
如图4。
6.恢复:但是在映射到CVV的时候,顶点间的⽐例产⽣了变化,物体常常产⽣形变,所以在映射到屏幕坐标系时,必须对其进⾏⽐例恢复。
采⽤的⽅法是:将近平⾯(即视平⾯)的宽⾼⽐例⼀开始就调整为与视⼝宽⾼⽐相同。
透视投影,与Z-BUFFER求值

假设坐标在 world space 是 Pw = {Xw,Yw,Zw}
经过camera space transform 得到Pe = {Xe,Ye,Ze}
然后经过project transform 转为 device space,这里假设转为 Zp 范围 [-1,1](OPENG的Z BUFFER)
也就是说,不管A和B是什么,在Z BUFFER中的数值,总是和物体顶点在camera space中的 -1/Ze 成线性的关系。 我们要做的就是求A 和B。求A和B,我们利用以下条件:当Ze = far 时, Zp = 1当Ze = near时,Zp = -1(在OPENGL下是这样。在D3D下是Zp =0)这实际是个2元一次方程。有了两个已知解,可以求出A和B。OPENGL下,A = 2nf/(f-n), B = (f+n)/(f-n)
考虑Xp = (Xep - left)*2/(right-left) -1 (Xep = -n* Xe/Ze)Yp = (Yep - left)*2/(right-left) -1 (Yep = -n* Ye/Ze)Zp = A* 1/Ze + B
为了得到4X4 MATRIX,我们需要把(Xp,Yp,Zp,1)转为齐次坐标 (-Xp*Ze, -Yp*Ye, -Zp*Ze, -Ze) 。然后由矩阵乘法公式和上面已知坐标,就可以得到PROJECTION MATRIX。
这样一来,我们就知道Z BUFFER的数值如何求得。先把物体顶点世界坐标Pw变换到camera space中得到Pe。然后再经过透视投影变换,求得Ze->Zp的数值。把这个数值填入Z buffer,就是显卡用来比较哪个像素在前,哪个像素在后的依据了。这也就是为什么near和far设置不合适的时候,很容易发生z fighting。一般情况下,离屏幕很近的一段距离,已经用掉了90%的z 浮点精度。在用于渲染视角里中远距离的场景时,深度的判别只靠剩下的10%精度来进行。具体推导可以看看http://www.cs.kuleuven.ac.be/cwis/research/graphics/INFOTEC/viewing-in-3d/node8.html
透视变换算法

透视变换算法
透视变换(Perspective Transformation)是一种将图像投影到一个新的视平面的变
换算法。
其基本原理是利用透视中心、像点、目标点三点共线的条件,按透视旋转定律使承影面(透视面)绕迹线(透视轴)旋转某一角度,破坏原有的投影光线束,仍能保持承影面上投影几何图形不变的变换。
透视变换矩阵可以理解为透视变换的公式表达,其通用变换公式为:(u,v)为原始图像像素坐标,(x=x’/w’,y=y’/w’)为变换之后的图像像素坐标。
在应用中,例如在移动机器人视觉导航研究中,由于摄像机与地面之间有一倾斜角,而不是直接垂直朝下(正投影),有时希望将图象校正成正投影的形式,就需要利用透视变换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
透视投影是3D固定流水线的重要组成部分,是将相机空间中的点从视锥体(frustum)变换到规则观察体(Canonical View Volume)中,待裁剪完毕后进行透视除法的行为。
在算法中它是通过透视矩阵乘法和透视除法两步完成的。
透视投影变换是令很多刚刚进入3D图形领域的开发人员感到迷惑乃至神秘的一个图形技术。
其中的理解困难在于步骤繁琐,对一些基础知识过分依赖,一旦对它们中的任何地方感到陌生,立刻导致理解停止不前。
没错,主流的3D APIs如OpenGL、D3D的确把具体的透视投影细节封装起来,比如gluPerspective(…) 就可以根据输入生成一个透视投影矩阵。
而且在大多数情况下不需要了解具体的内幕算法也可以完成任务。
但是你不觉得,如果想要成为一个职业的图形程序员或游戏开发者,就应该真正降伏透视投影这个家伙么?我们先从必需的基础知识着手,一步一步深入下去(这些知识在很多地方可以单独找到,但我从来没有在同一个地方全部找到,但是你现在找到了)。
我们首先介绍两个必须掌握的知识。
有了它们,我们才不至于在理解透视投影变换的过程中迷失方向(这里会使用到向量几何、矩阵的部分知识,如果你对此不是很熟悉,可以参考可以找到一组坐标(v1,v2,v3),使得v = v1 a + v2 b + v3 c (1)而对于一个点p,则可以找到一组坐标(p1,p2,p3),使得p – o = p1 a + p2 b + p3 c (2)从上面对向量和点的表达,我们可以看出为了在坐标系中表示一个点(如p),我们把点的位置看作是对这个基的原点o所进行的一个位移,即一个向量——p – o(有的书中把这样的向量叫做位置向量——起始于坐标原点的特殊向量),我们在表达这个向量的同时用等价的方式表达出了点p:p = o + p1 a + p2 b + p3 c (3)(1)(3)是坐标系下表达一个向量和点的不同表达方式。
这里可以看出,虽然都是用代数分量的形式表达向量和点,但表达一个点比一个向量需要额外的信息。
如果我写出一个代数分量表达(1, 4, 7),谁知道它是个向量还是个点!我们现在把(1)(3)写成矩阵的形式:这里(a,b,c,o)是坐标基矩阵,右边的列向量分别是向量v和点p在基下的坐标。
这样,向量和点在同一个基下就有了不同的表达:3D向量的第4个代数分量是0,而3D点的第4个代数分量是1。
像这种这种用4个代数分量表示3D几何概念的方式是一种齐次坐标表示。
“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。
”—— F.S. Hill, JR这样,上面的(1, 4, 7)如果写成(1,4,7,0),它就是个向量;如果是(1,4,7,1),它就是个点。
下面是如何在普通坐标 (Ordinary Coordinate)和齐次坐标(Homogeneous Coordinate)之间进行转换:从普通坐标转换成齐次坐标时,如果(x,y,z)是个点,则变为(x,y,z,1);如果(x,y,z)是个向量,则变为 (x,y,z,0)从齐次坐标转换成普通坐标时,如果是(x,y,z,1),则知道它是个点,变成(x,y,z);如果是(x,y,z,0),则知道它是个向量,仍然变成(x,y,z)以上是通过齐次坐标来区分向量和点的方式。
从中可以思考得知,对于平移T、旋转R、缩放S这3个最常见的仿射变换,平移变换只对于点才有意义,因为普通向量没有位置概念,只有大小和方向,这可以通过下面的式子清楚地看出:而旋转和缩放对于向量和点都有意义,你可以用类似上面齐次表示来检测。
从中可以看出,齐次坐标用于仿射变换非常方便。
此外,对于一个普通坐标的点P=(Px, Py, Pz),有对应的一族齐次坐标(wPx, wPy, wPz, w),其中w不等于零。
比如,P(1, 4,7)的齐次坐标有(1, 4, 7, 1)、(2, 8, 14, 2)、(-0.1, -0.4, -0.7, -0.1)等等。
因此,如果把一个点从普通坐标变成齐次坐标,给x,y,z乘上同一个非零数w,然后增加第4个分量w;如果把一个齐次坐标转换成普通坐标,把前三个坐标同时除以第4个坐标,然后去掉第4个分量。
由于齐次坐标使用了4个分量来表达3D概念,使得平移变换可以使用矩阵进行,从而如F.S. Hill, JR所说,仿射(线性)变换的进行更加方便。
由于图形硬件已经普遍地支持齐次坐标与矩阵乘法,因此更加促进了齐次坐标使用,使得它似乎成为图形学中的一个标准。
简单的线性插值这是在图形学中普遍使用的基本技巧,我们在很多地方都会用到,比如2D位图的放大、缩小,Tweening变换,以及我们即将看到的透视投影变换等等。
基本思想是:给一个x属于[a, b],找到y属于[c, d],使得x与a的距离比上ab长度所得到的比例,等于y与c的距离比上cd长度所得到的比例,用数学表达式描述很容易理解:这样,从a到b的每一个点都与c到d上的唯一一个点对应。
有一个x,就可以求得一个y。
此外,如果x不在[a, b]内,比如x < a或者x > b,则得到的y也是符合y < c或者y > d,比例仍然不变,插值同样适用。
透视投影变换好,有了上面两个理论知识,我们开始分析这次的主角——透视投影变换。
这里我们选择OpenGL的透视投影变换进行分析,其他的 APIs会存在一些差异,但主体思想是相似的,可以类似地推导。
经过相机矩阵的变换,顶点被变换到了相机空间。
这个时候的多边形也许会被视锥体裁剪,但在这个不规则的体中进行裁剪并非那么容易的事情,所以经过图形学前辈们的精心分析,裁剪被安排到规则观察体(Canonical View Volume, CVV)中进行,CVV是一个正方体,x, y, z的范围都是[-1,1],多边形裁剪就是用这个规则体完成的。
所以,事实上是透视投影变换由两步组成:1)用透视变换矩阵把顶点从视锥体中变换到裁剪空间的CVV中。
2) CVV裁剪完成后进行透视除法(一会进行解释)。
我们一步一步来,我们先从一个方向考察投影关系。
上图是右手坐标系中顶点在相机空间中的情形。
设P(x,z)是经过相机变换之后的点,视锥体由eye——眼睛位置,np——近裁剪平面,fp——远裁剪平面组成。
N是眼睛到近裁剪平面的距离,F是眼睛到远裁剪平面的距离。
投影面可以选择任何平行于近裁剪平面的平面,这里我们选择近裁剪平面作为投影平面。
设P’(x’,z’)是投影之后的点,则有z’ = -N。
通过相似三角形性质,我们有关系:同理,有这样,我们便得到了P投影后的点P’从上面可以看出,投影的结果z’始终等于-N,在投影面上。
实际上,z’对于投影后的P’已经没有意义了,这个信息点已经没用了。
但对于3D图形管线来说,为了便于进行后面的片元操作,例如z缓冲消隐算法,有必要把投影之前的z保存下来,方便后面使用。
因此,我们利用这个没用的信息点存储z,处理成:这个形式最大化地使用了3个信息点,达到了最原始的投影变换的目的,但是它太直白了,有一点蛮干的意味,我感觉我们最终的结果不应该是它,你说呢?我们开始结合CVV进行思考,把它写得在数学上更优雅一致,更易于程序处理。
假入能够把上面写成这个形式:那么我们就可以非常方便的用矩阵以及齐次坐标理论来表达投影变换:其中哈,看到了齐次坐标的使用,这对于你来说已经不陌生了吧?这个新的形式不仅达到了上面原始投影变换的目的,而且使用了齐次坐标理论,使得处理更加规范化。
注意在把变成的一步我们是使用齐次坐标变普通坐标的规则完成的。
这一步在透视投影过程中称为透视除法(Perspective Division),这是透视投影变换的第2步,经过这一步,就丢弃了原始的z值(得到了CVV中对应的z值,后面解释),顶点才算完成了投影。
而在这两步之间的就是CVV裁剪过程,所以裁剪空间使用的是齐次坐标,主要原因在于透视除法会损失一些必要的信息(如原始z,第4个-z保留的)从而使裁剪变得更加难以处理,这里我们不讨论CVV裁剪的细节,只关注透视投影变换的两步。
矩阵就是我们投影矩阵的第一个版本。
你一定会问为什么要把z写成有两个原因:1)P’的3个代数分量统一地除以分母-z,易于使用齐次坐标变为普通坐标来完成,使得处理更加一致、高效。
2)后面的CVV是一个x,y,z的范围都为[-1,1]的规则体,便于进行多边形裁剪。
而我们可以适当的选择系数a和b,使得这个式子在z = -N的时候值为-1,而在z = -F的时候值为1,从而在z方向上构建CVV。
接下来我们就求出a和b:这样我们就得到了透视投影矩阵的第一个版本:使用这个版本的透视投影矩阵可以从z方向上构建CVV,但是x和y方向仍然没有限制在[-1,1]中,我们的透视投影矩阵的下一个版本就要解决这个问题。
为了能在x和y方向把顶点从Frustum情形变成CVV情形,我们开始对x和y进行处理。
先来观察我们目前得到的最终变换结果:我们知道-Nx / z的有效范围是投影平面的左边界值(记为left)和右边界值(记为right),即[left, right],-Ny / z则为[bottom, top]。
而现在我们想把-Nx / z属于[left, right]映射到x属于[-1, 1]中,-Ny / z属于[bottom, top]映射到y 属于[-1, 1]中。
你想到了什么?哈,就是我们简单的线性插值,你都已经掌握了!我们解决掉它:则我们得到了最终的投影点:下面要做的就是从这个新形式出发反推出下一个版本的透视投影矩阵。
注意到是经过透视除法的形式,而P’只变化了x和y分量的形式,az+b和-z是不变的,则我们做透视除法的逆处理——给P’每个分量乘上-z,得到而这个结果又是这么来的:则我们最终得到:M 就是最终的透视变换矩阵。
相机空间中的顶点,如果在视锥体中,则变换后就在CVV中。
如果在视锥体外,变换后就在CVV 外。
而CVV本身的规则性对于多边形的裁剪很有利。
OpenGL在构建透视投影矩阵的时候就使用了M的形式。
注意到M的最后一行不是(0 0 0 1)而是(0 0 -1 0),因此可以看出透视变换不是一种仿射变换,它是非线性的。
另外一点你可能已经想到,对于投影面来说,它的宽和高大多数情况下不同,即宽高比不为1,比如640/480。
而CVV的宽高是相同的,即宽高比永远是1。
这就造成了多边形的失真现象,比如一个投影面上的正方形在CVV的面上可能变成了一个长方形。
解决这个问题的方法就是在对多变形进行透视变换、裁剪、透视除法之后,在归一化的设备坐标(Normalized Device Coordinates)上进行的视口(viewport)变换中进行校正,它会把归一化的顶点之间按照和投影面上相同的比例变换到视口中,从而解除透视投影变换带来的失真现象。