汽车稳定性控制系统模型及横摆控制仿真
车辆横向稳定性的模糊控制仿真
摘
要 : 辆 横 向稳 定 性 一 般 是 由车 辆 的结 构 来 保 证 的 , 车 辆 在 较 大 侧 向力 作 用 下 将 丧 失 横 向 稳 定 性 、 车 但 通
过 建 立车 辆 转 向 运 动 的 简 化 模 型 , 用 前 馈 补 偿 和 模 糊 控 制 策 略 , 前 轮 转 向 角 视 为 前 馈 输 入 变 量 来 补 偿 转 利 将
Vo14 NO、2 .
J n 2 0 u 、0 7
文章 编号 :6 2 9 3 ( 0 7 0 —0 4 ~ 0 1 7 — 3 1 2 0 )2 0 9 5
车 辆 横 向稳 定 性 的模 糊 控 制仿 真
吴义 虎 ,宋 丹 丹 ,侯 志祥 ,袁 翔
( 沙理工大学 汽车与机械工程学 院, 南 长沙 长 湖 40 7) 1 0 6
பைடு நூலகம்
W U — Yihu,SON G n da Da - n,H OU Zhixing,YU AN a g — a Xi n
( l g fAu o b l n e h nc lEn i e rn Ch n s a Un v r i f Co l e o t mo i a d M c a ia g n e i g, a g h i e st o e e y
向角 引起 的车 辆 侧 偏角 变 化 ; 过 左 右 车 轮 制 动 力 差 产 生 附 加 力 矩 来 控 制 车 辆 的 横 摆 运 动 , 通 同时 以 车 辆 横 摆 角速 度 为 反 馈 输 入 变量 来 校 正 消 除 系统 误 差 , 计 了 车 辆 模 糊 控 制 器 , 对 控 制 系 统 在 不 同 车 速 下 进 行 了 仿 设 并 真 分 析、 真 结 果 表 明 , 加 控 制 的 车 辆 与无 控 制 的 相 比 , 摆 角 速 度 与 侧 偏 角 的 输 出稳 态 值 减小 , 凋量 降 仿 施 横 超
提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性

提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性摘要:车辆稳定性控制系统是一种主动的安全系统,为防止事故发生并利用微分制动器产生人工横摆力矩稳定车辆的机动而设计。
在本文中,为了提高车辆的操纵性,横向稳定性,和侧倾稳定性,每个参考横摆角速度的设计和组合到目标横摆角速度都取决于驾驶情况。
偏航角速度控制器的设计以及跟踪目标横摆角速度都是基于滑模控制理论。
横摆角速度控制器所需的总的横摆力矩以及每个制动器压力的合理分布,都由有效控制车轮决定。
估计算法是一种可以识别出滚动角和车身侧滑角的简化动力学模型和参数自适应的方法。
本文中所提出的车辆稳定性控制系统和估计算法的性能与仿真结果可以验证实验结果。
关键词:车辆稳定性控制系统,目标横摆角速度,角速度控制器,制动力分配,滚动角估计,车身侧滑角估计1.介绍有一个日益需求的主动安全系统,通过人工干预的方法以防止或减少事故的发生(You et al .,2006)。
这个系统超出仅仅最小化损失事故的被动安全概念,它的必要性日益被市场所公认。
因此, 近年来进行了不同的地面上车辆主动安全系统的研究。
尽管有其他替代技术保护车辆的稳定性,例如4 ws(四轮引导),AFS(主动前轮引导),后轮转向,和微分牵引(Song et al .,2007),最近的主流车辆安全系统是集中在制动差动和制动干预。
这主要是从硬件现有的可靠性和成本效率出发考虑得出的结果。
现有的技术成果有ABS(防抱死制动系统)和TCS(牵引力控制系统)以及在制动/加速度时持有车轮滑转线性滑动。
在这里假设车辆配备了差动制动系统,因此, 本文提出了车辆稳定控制系统主要研究通过生成与控制车辆的横摆力矩差动制动在四个车轮。
本文使用的横摆角速度是一个控制变量。
由于车辆的车身侧偏角可以使横摆角速度稳定控制在一个适当的参考横摆角速度,使车身侧滑角动力转变成稳定的内部动力(You et al .,2006)。
同样,翻车的风险可以通过稳定辊动力学和控制横摆率减轻。
商用车横向稳定性优化控制联合仿真分析
工
程
学
报
VO1 . 5 3
J a n.
NO. 2
20l 7
J OURNAL 0F ME CHANI CAL E NGI NEE RI NG
Do I :1 0 . 3 9 0 1 / J M E. 2 0 1 7 . O 2 . 1 1 5
工况进行车辆横 向稳 定性仿真分析 。研究结果表 明,与传统 的电子稳定控制系统( E l e c t r o n i c s t a b i l i t y c o n t r o l , E S C ) 控制策略相
比较 ,优化控制后 车辆的横摆角速度 、质心侧偏角 以及 侧向加速 度等动态响应指标均满足控制要求 ,并且实 际行驶轨迹与 目
Ab s t r a c t :A c o mme r c i a l v e h i c l e l a t e r a l s t a b i l i y t o p t i mi z a t i o n c o n t r o l s t r a t e g y b a s e d o n p a r t i c l e S Wa l T I 1 o p t i mi z a t i o n a n d n e u r a l n e t wo r k o p t i mi z a t i o n a l g o it r h m i s p r o p o s e d , a n d u p p e r nd a l o we r d o u b l e c o n r t o l mo d e i s d e s i g n e d , y a w r a t e v e l o c i y t nd a v e h i c l e s i d e
基于单轮差动制动的汽车横向稳定性控制研究及仿真分析
1 单轮 差动 制动的横 向稳定控 制
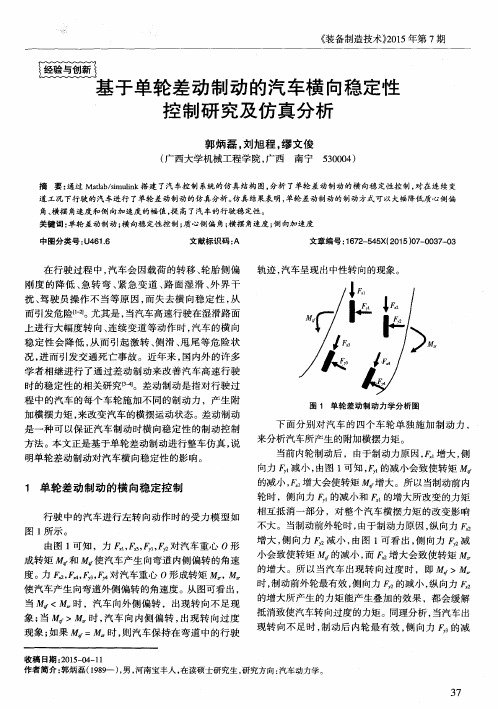
行 驶 中 的汽 车 进行 左 转 向动 作 时 减小 , 增大会使转矩 % 增大。所以当制动前内 轮时 ,侧 向力 。 的减小和 的增大所改变 的力矩
相互 抵 消 一部 分 ,对整 个 汽 车横 摆 力矩 的改 变影 响
抵 消 致使 汽 车转 向过 度 的力矩 。同理分 析 , 当汽 车 出 象; 当 > 时, 汽 车向 内侧偏转 , 出现 转 向过度 现转 向不 足时 , 制动后 内轮最有效 , 侧向力 的减 现象 ; 如 果 = 时, 则 汽 车 保 持 在 弯道 中 的行 驶
收稿 日期 : 2 0 1 5 — 0 4 — 1 1 作者简介 : 郭炳磊 ( 1 9 8 9 一) , 男, 河南宝丰人 , 在读硕士研究生 , 研究方 向 : 汽车动力学 。 3 7
Eq u i p me n t Ma n u f a c t u r i n g T e c h n o l o g y N o . 7, 2 0 1 5
小, 纵 向力 的增 大所产生的力矩都会缓解抵消致 使汽车转向不足的力矩 。
矩 的效 果如 图 2所 示[ 5 1 。
扰、 驾驶员 操作不 当等原 因 , 而失去横 向稳定 性 , 从
而 引发 危 险【 。尤 其是 , 当汽 车 高速 行驶 在 湿滑 路 面 上 进 行 大 幅度 转 向 、 连续 变 道 等 动 作 时 , 汽 车 的 横 向
稳定 性会降低 , 从而引起激转 、 侧滑 、 甩尾等危 险状
不大 。当制动前外轮时 , 由于制动力原因 , 纵 向力 增大 , 侧 向力 减小 , 由图 1 可看 出, 侧 向力 减 小会致使转矩 的减小 , 而 增大会致使转矩
基于模糊PID控制的汽车横向稳定性控制研究与仿真的开题报告
基于模糊PID控制的汽车横向稳定性控制研究与仿真的开题报告【摘要】随着汽车工业的不断发展,汽车已经成为了人们日常生活中不可或缺的交通工具,但随之而来的问题是汽车横向稳定性不足,容易导致交通事故。
因此,本文提出了一种基于模糊PID控制的汽车横向稳定性控制方法,以解决这一问题。
在该方法中,采用了模糊控制和PID控制相结合的方式,通过对车辆侧向加速度进行控制,以提高车辆的横向稳定性。
本文通过建立汽车的横向稳定性控制模型,采用MATLAB/Simulink 进行了仿真实验。
仿真结果表明,该控制方法可以有效地提高汽车的横向稳定性,减少车辆侧翻和失控的风险,从而保障行车安全。
【关键词】模糊PID控制,汽车横向稳定性,MATLAB/Simulink,仿真实验【研究背景与意义】汽车交通事故在日常生活中屡见不鲜,其中很大一部分都是由于车辆失控或侧翻导致的。
因此,提高汽车的横向稳定性是保障行车安全的重要措施之一。
目前,汽车横向稳定性控制方法主要包括传统的PID(比例、积分、微分)控制和模糊控制等。
但传统PID控制方法存在参数调节难的问题,而单纯采用模糊控制方法不能兼顾控制精度和实时性。
因此,本文提出了一种基于模糊PID控制的汽车横向稳定性控制方法,以解决传统PID控制和模糊控制方法的问题。
【研究内容与方法】本文首先建立了汽车横向稳定性控制模型,然后采用模糊PID控制方法进行控制。
具体来说,该方法以车辆侧向加速度作为控制量,通过PID控制和模糊控制相结合的方式进行控制。
PID控制用于输出控制量,模糊控制用于调节控制量的参数,从而实现对车辆横向稳定性的控制。
本文采用MATLAB/Simulink进行了仿真实验。
在仿真中,模拟了汽车在各种道路条件下的运行情况,并对控制方法进行了比较。
通过对仿真结果的分析,评价了控制方法的效果。
【预期结果】预计通过本文的研究,可以提出一种基于模糊PID控制的汽车横向稳定性控制方法,并通过仿真实验验证该方法的可行性和有效性。
汽车稳定性横摆力矩控制仿真研究
() 2
() a
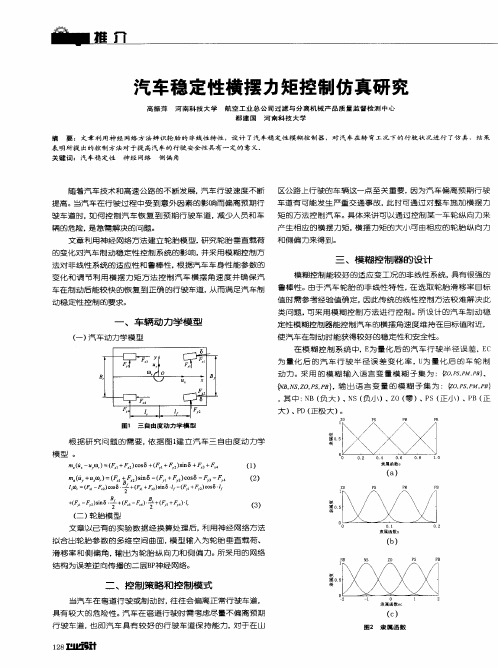
+。 )6 + 一) + +) (一 s- ( 譬( ‘ i n
( ) 胎 模 型 二 轮
( 3 )
唾 05
描
文 章 以 已有 的 实 验 数 据 经 换 算处 理 后 , 用神 经 网络 方 法 利
噻 0 槲
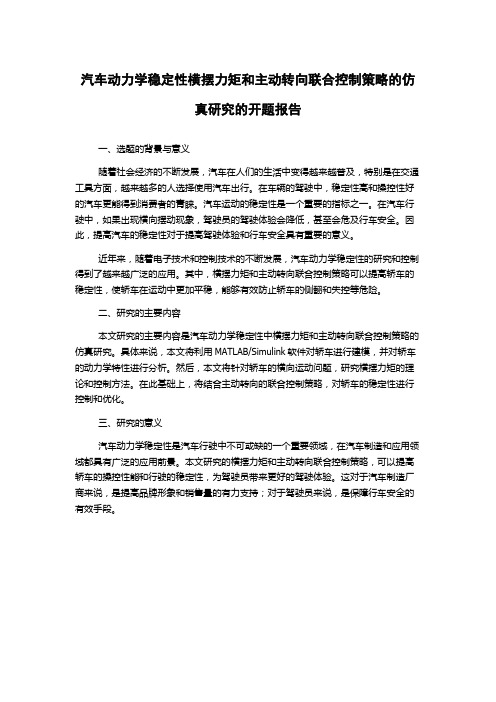
隶属函数e c
() c
图2 隶属 函数
18 ' ̄ f 2 TiWi '
,
其 中 : B( 大 ) N 负 小 ) Z 零 )、 S( N 负 、 S( 、 0( P T小 ) P 正 I 、 B(
大 ) P 正极 大 ) 、 D( 。
图 1 三 自 由度 动 力 学 模 型
根 据 研 究 问 题 的 需 要 , 据 图 l 立 汽 车三 自 由度 动 力 学 依 建
法 对 非 线 性 系 统 的 适 应 性和 鲁棒 性 , 据 汽 车 车 身 性 能参 数 的 根
三 、模 糊 控 制 器 的设 计
模 糊 控 制 能 较 好 的适 应 变 工 况 的非 线 性 系统 , 有很 强 的 具
变化 和 调 节 利 用 横 摆 力矩 方 法 控 制 汽 车 横 摆 角 速 度 并 确 保 汽
拟 合 出 轮 胎 参 数 的多 维 空 间 曲面 , 型 输 入 为轮 胎 垂 直 载 荷 、 模
隶属函数
() b
滑 移 率 和 侧 偏 角 , 出 为轮 胎 纵 向力 和 侧 偏 力 。所 采 用 的 网 络 输 结 构 为 误 差 逆 向传 播 的 二层 B 神 经 网 络。 P
神 经 网络 法对 于提 高 汽 车 的行 驶 安 全 性 具有 一 定 的 意 义 关键 词 : 汽 车稳 定性
汽车动力学稳定性横摆力矩和主动转向联合控制策略的仿真研究的开题报告
汽车动力学稳定性横摆力矩和主动转向联合控制策略的仿
真研究的开题报告
一、选题的背景与意义
随着社会经济的不断发展,汽车在人们的生活中变得越来越普及,特别是在交通工具方面,越来越多的人选择使用汽车出行。
在车辆的驾驶中,稳定性高和操控性好的汽车更能得到消费者的青睐。
汽车运动的稳定性是一个重要的指标之一。
在汽车行驶中,如果出现横向摆动现象,驾驶员的驾驶体验会降低,甚至会危及行车安全。
因此,提高汽车的稳定性对于提高驾驶体验和行车安全具有重要的意义。
近年来,随着电子技术和控制技术的不断发展,汽车动力学稳定性的研究和控制得到了越来越广泛的应用。
其中,横摆力矩和主动转向联合控制策略可以提高轿车的稳定性,使轿车在运动中更加平稳,能够有效防止轿车的侧翻和失控等危险。
二、研究的主要内容
本文研究的主要内容是汽车动力学稳定性中横摆力矩和主动转向联合控制策略的仿真研究。
具体来说,本文将利用MATLAB/Simulink软件对轿车进行建模,并对轿车的动力学特性进行分析。
然后,本文将针对轿车的横向运动问题,研究横摆力矩的理论和控制方法。
在此基础上,将结合主动转向的联合控制策略,对轿车的稳定性进行控制和优化。
三、研究的意义
汽车动力学稳定性是汽车行驶中不可或缺的一个重要领域,在汽车制造和应用领域都具有广泛的应用前景。
本文研究的横摆力矩和主动转向联合控制策略,可以提高轿车的操控性能和行驶的稳定性,为驾驶员带来更好的驾驶体验。
这对于汽车制造厂商来说,是提高品牌形象和销售量的有力支持;对于驾驶员来说,是保障行车安全的有效手段。
基于联合仿真的汽车横摆稳定性控制系统研究
基于联合仿真的汽车横摆稳定性控制系统研究康南; 周鹏【期刊名称】《《湖州职业技术学院学报》》【年(卷),期】2019(017)002【总页数】5页(P73-76,81)【关键词】汽车横摆稳定性控制系统; 操纵稳定性; 联合仿真; CarSimsimulink【作者】康南; 周鹏【作者单位】湖州职业技术学院机电与汽车工程学院浙江湖州 313000; 昆明冶金高等专科学校机械工程学院昆明 650033【正文语种】中文【中图分类】U463.53随着中国汽车工业的飞速发展和汽车保有量的急剧增加,汽车的安全性和操纵稳定性受到越来越多的科研人员的重视和深入研究[1]95-107。
如吴刚院、刘丹等设计了汽车横摆稳定性控制系统,并通过联合仿真的形式,验证其有效性和可靠性[2]30-35;杨秀建、王增彩等设计了主动转向和横摆稳定性集成控制系统[3]1-10;王其东、刘伟等采用滑模控制的方法,设计了汽车稳定控制系统[4]82-90,等等。
近年来,科研人员更加关注汽车横摆稳定性控制系统的开发。
汽车在进行超车换道、紧急避障和弯道转向等操作时,若轮胎力进入了非线性区,常会发生侧滑和甩尾等驾驶员难以控制的横摆失稳现象[5]300-308。
针对汽车的操纵稳定性和安全性问题,国内外专家学者从理论分析、模型仿真或场地试验等多个方面进行了广泛且深入的研究,分析了影响汽车横摆失稳的诸多因素,并设计了横摆稳定控制系统来改善汽车行驶的稳定性和安全性[6]723-732 [7]141-148。
与欧美和日本等汽车技术发达的国家相比,我国在汽车操纵稳定性方面的研究起步较晚,积累的成果较少,开发高性能的汽车横摆稳定性控制系统比较困难,装车率也较低[1]95-107。
本文主要研究汽车横摆稳定性控制问题,采用基于差动制动的控制方式来提高汽车的横摆稳定性,在CarSim中建立整车仿真模型,在Simulink中设计控制策略并搭建仿真模型,探讨CarSim与Simulink的联合仿真问题,并通过联合仿真的形式对本文设计的控制策略进行验证分析。
汽车稳定性控制系统硬件在环仿真

汽车稳定性控制系统硬件在环仿真汽车稳定性控制系统是现代车辆的重要安全装置之一,它能够帮助驾驶员在复杂路况中更好地控制车辆,提高行车安全性能。
本文将介绍汽车稳定性控制系统的原理、硬件在环仿真的概念及其在汽车稳定性控制中的应用前景。
汽车稳定性控制系统通过采集车辆的状态信息,如车速、转向角、横摆角速度等,判断车辆的行驶状态,从而控制车辆的各个执行器,如制动器、发动机等,以保持车辆的稳定性。
该系统通常由传感器、控制器和执行器组成。
传感器负责监测车辆状态信息,控制器根据传感器输入计算控制量,执行器则根据控制量对车辆进行相应的调整。
硬件在环仿真是一种有效的开发手段,它通过模拟汽车控制系统的工作环境,对控制系统进行测试和验证。
在硬件在环仿真中,控制器、传感器和执行器均由模拟器代替,测试人员可以输入各种工况下的模拟信号,观察控制系统的响应和执行情况,从而对控制策略进行调整和优化。
通过硬件在环仿真,我们可以观察到汽车稳定性控制在不同工况下的表现。
例如,在紧急避障情况下,稳定性控制系统应能迅速判断出车辆的行驶状态,并采取相应的控制措施,以保持车辆的稳定性。
通过仿真结果分析,可以验证稳定性控制系统在不同情况下的响应速度和控制效果,从而评估其性能。
汽车稳定性控制系统对于提高车辆的安全性能具有重要意义。
硬件在环仿真作为一种有效的开发手段,能够模拟汽车控制系统的工作环境,对控制策略进行测试和验证。
通过仿真结果分析,可以评估稳定性控制系统的性能,为实际应用提供参考。
随着汽车控制技术的发展,硬件在环仿真在汽车稳定性控制中的应用前景将更加广阔。
随着汽车技术的不断发展,汽车控制系统日益复杂。
为了提高汽车控制系统的开发效率和可靠性,硬件在环仿真(Hardware-in-the-Loop Simulation,简称HILS)被广泛应用于汽车控制系统开发中。
硬件在环仿真能够在原型设计阶段对控制系统进行仿真测试,及早发现并解决潜在问题,从而缩短开发周期、降低开发成本。
汽车横风下的动力学仿真分析及横摆稳定性研究

汽车横风下的动力学仿真分析及横摆稳定性研究作者:吴帅贾宝光位球球辛庆锋来源:《时代汽车》2024年第12期摘要:目前随着汽车行业的发展,对于汽车的稳定性能要求也越来越高。
本论文以某款车型为研究对象,探讨在高速的行驶的情况下,汽车结构参数、底盘参数等20个参数对于汽车横风稳定性的影响。
首先利用CFD软件计算车辆气动力系数,并通过Carsim软件建立整车动力学仿真模型,将气动力系数导入Carsim气动力学模型中。
在专家工程师所设定可接受程度的参数进行动力学仿真分析,并将汽车的横摆角速度作为车辆的稳定性能指标评估。
仿真结果表明,汽车前、后载荷对于横摆稳定性能影响最大,针对此款后驱车辆,前/后载荷增大,横摆稳定性能越好;风压中心位于质心或质心稍微靠后的位置,横摆角速度较小,具有较好横摆性能。
关键词:横风稳定性动力学仿真汽车底盘 CFD Carsim1 前言近些年来,新能源汽车行业快速发展,汽车稳定性能成为了研究的热点之一。
同时电动汽车或混合动力汽车等创新汽车概念进一步挑战了乘用车的基本布局[1]。
汽车在行驶过程中常会受到横风气流的干扰,尤其是车辆经过桥梁、涵洞、高楼等位置,车辆常常会产生较大的横摆角速度,这种情况下会较大影响车辆的舒适性和安全性,所以对于车辆横风稳定性的研究是必要的。
目前针对车辆的横风稳定性方法主要有三种:有限元分析、风洞试验、动力学分析方法。
針对有限元法和风洞试验,这两种方法主要运用于车辆气动外形的分析。
M. Gohle[2]通过风洞试验分析了a柱圆角、引擎盖-挡风玻璃夹角、后盖角度参数对于车辆侧向力的影响,a柱半径较大时,横摆力矩减小;引擎盖-挡风玻璃夹角对于前轮和后轮的效果相反,夹角减小,前轮侧向力减小,但后轮侧向力增加;后盖角度会极大影响横摆力矩。
王夫亮[3]针对某轿车模型,通过数值模拟和风洞试验对比气动六分力的对比,验证了利用CFD计算气动力系数的可行性,并研究横风风速对于汽车气动特性的影响。
基于联合仿真的汽车横摆稳定性控制系统研究
2019年第2期N o.2.2019㊀㊀㊀㊀湖州职业技术学院学报J o u r n a l o f H u z h o u V o c a t i o n a l a n d T e c h n o l o g i c a l C o l l e g e㊀㊀㊀㊀㊀㊀㊀2019年6月J u n.2019d o i:10.13690/j.c n k i.h z y x b.i s s n.16722388.2019.02.20基于联合仿真的汽车横摆稳定性控制系统研究∗康㊀南1,周㊀鹏2(1.湖州职业技术学院㊀机电与汽车工程学院,浙江㊀湖州㊀313000;2.昆明冶金高等专科学校㊀机械工程学院,昆明㊀650033)摘要:为了提高汽车在极限行驶工况下的操纵稳定性和安全性,基于C a r S i m,建立了非线性汽车整车仿真模型,设计了汽车横摆稳定性控制系统.该控制系统采用分层控制方式,分为顶层横摆力矩控制器㊁中间层制动力分配器和底层车轮滑移率调节器三个部分.顶层横摆力矩控制器决策出附加横摆力矩,用以改善整车的横摆稳定性;中间层制动力分配器合理分配了四个车轮的制动力,用以实现顶层控制器输出的附加横摆力矩;底层滑移率调节器采用基于逻辑门的限值方法,用以防止车轮抱死.搭建了C a r S i m S i m u l i n k联合仿真模型.通过两次单移线操作模拟两次超车换道试验,对控制系统进行了仿真验证分析.结果表明:在极限工况下,该控制方案能够显著地改善整车的横摆稳定性,最大限度地提高了整车行驶的安全性.关键词:汽车横摆稳定性控制系统;操纵稳定性;联合仿真;C a r S i m s i m u l i n k中图分类号:U463.53文献标志码:A文章编号:16722388(2019)02007304Y a wS t a b i l i t y C o n t r o l o fV e h i c l eB a s e d o nC a r S i m s i m u l i n kK A N G㊀N a n1,Z H O U㊀P e n g2(1.S c h o o l o fM e c h a t r o n i c s a n dA u t o m o b i l eE n g i n e e r i n g,H u z h o uV o c a t i o n a l a n dT e c h n o l o g i c a l C o l l e g e,H u z h o u313000,C h i n a;2.F a c u l t y o fM e c h a n i c a l a n dE n g i n e e r i n g,K u n m i n g M e t a l l u r g y C o l l e g e,K u n m i n g650033,C h i n a)A b s t r a c t:I no r d e r t o i m p r o v e t h e s a f e t y a n dh a n d l i n g s t a b i l i t y o f v e h i c l eu n d e r e x t r e m ew o r k i n g c o n d i t i o n s,an o n l i n e a r v e h i c l e s i m u l a t i o n m o d e lw a s e s t a b l i s h e db a s e do nC a r S i m,a n d t h ev e h i c l e y a ws t a b i l i t y c o n t r o l s c h e m ew a sd e s i g n e d.T h ec o n t r o l s c h e m ea d o p t sa l a y e r e d c o n t r o lm e t h o d,w h i c h i s d i v i d e d i n t o t h r e e p a r t s:t o py a w m o m e n t c o n t r o l l e r,i n t e r m e d i a t e l a y e r b r a k e f o r c e d i s t r i b u t o r a n db o t t o m w h e e l s l i p r a t e a d j u s t e r.T h e t o p c o n t r o l l e r d e t e r m i n e s a d d i t i o n a l y a w m o m e n t t o i m p r o v e t h ew h o l e v e h i c l e.T h e y a ws t a b i l i t yp e r f o r m a n c e,t h e m i d d l e l a y e r b r a k e f o r c e d i s t r i b u t o r r e a s o n a b l y d i s t r i b u t e s t h e b r a k i n g f o r c e o f t h e f o u rw h e e l s t o a c h i e v e t h e a d d i t i o n a l y a w m o m e n t,a n d t h e b o t t o ms l i p r a t i o a d j u s t e r a d o p t s a l o g i c t h r e s h o l dv a l u em e t h o d t o p r e v e n t t h ew h e e l f r o ml o c k i n g.T h e j o i n t s i m u l a t i o nm o d e l o f C a r S i m s i m u l i n kw a s b u i l t.T h e c o n t r o l s c h e m ew a s v e r i f i e db y t w o s i n g l e s h i f t t e s t o p e r a t i o n s.T h e r e s u l t s s h o wt h a t t h e c o s i m u l a t i o no fC a rGS i m s i m u l i n k c a n e f f e c t i v e l y a n a l y z e a n d e v a l u a t e t h e v e h i c l e s t a b i l i t y c o n t r o l s c h e m e.T h e s o l u t i o n c a n s i g n i f i c a n t l y i m p r o v e t h e y a ws t a b i lGi t y o f t h e v e h i c l e.K e y w o r d s:v e h i c l e y a ws t a b i l i t y c o n t r o l s y s t e m;h a n d l i n g s t a b i l i t y;j o i n t s i m u l a t i o n;C a r S i m s i m u l i n k随着中国汽车工业的飞速发展和汽车保有量的急剧增加,汽车的安全性和操纵稳定性受到越来越多的科研人员的重视和深入研究[1]95107.如吴刚院㊁刘丹等设计了汽车横摆稳定性控制系统,并通过联合仿真的形式,验证其有效性和可靠性[2]3035;杨秀建㊁王增彩等设计了主动转向和横摆稳定性集成控制系统[3]110;王其东㊁刘伟等采用滑模控制的方法,设计了汽车稳定控制系统[4]8290,等等.近年来,科研人员更加关注汽车横摆稳定性控制系统的开发.汽车在进行超车换道㊁紧急避障和弯道转向等操作时,若轮胎力进入了非线性区,常会发生侧滑和甩∗收稿日期:20181112基金项目:本文系2017年度浙江省教育厅一般科研项目 汽车横摆稳定性的最优重构控制研究 (Y201738490)的研究成果之一.作者简介:1.康㊀南(1987-),男,江苏连云港人,助教,车辆工程硕士,主要从事汽车系统动力学研究;2.周㊀鹏(1986-),男,山东邹平人,讲师,车辆工程硕士,主要从事新能源汽车技术及智能交通研究.尾等驾驶员难以控制的横摆失稳现象[5]300308.针对汽车的操纵稳定性和安全性问题,国内外专家学者从理论分析㊁模型仿真或场地试验等多个方面进行了广泛且深入的研究,分析了影响汽车横摆失稳的诸多因素,并设计了横摆稳定控制系统来改善汽车行驶的稳定性和安全性[6]723732[7]141148.与欧美和日本等汽车技术发达的国家相比,我国在汽车操纵稳定性方面的研究起步较晚,积累的成果较少,开发高性能的汽车横摆稳定性控制系统比较困难,装车率也较低[1]95107.本文主要研究汽车横摆稳定性控制问题,采用基于差动制动的控制方式来提高汽车的横摆稳定性,在C a r S i m 中建立整车仿真模型,在S i m u l i n k 中设计控制策略并搭建仿真模型,探讨C a r S i m 与S i m u l i n k 的联合仿真问题,并通过联合仿真的形式对本文设计的控制策略进行验证分析.一、汽车横摆稳定性控制系统的设计(一)理想横摆角速度响应本研究以只考虑横摆运动和侧向运动的线性二自由度车辆模型为参考模型,将前轮转向角输入作为外部输入响应,横摆角速度和质心侧偏角作为状态变量,得名义横摆角速度响应为:γd =K γ1+T γs δf (1)其中:K γ=V x /l 1+m /l 2()l f /C r -l r /C f ()V 2x ;T γ=I z V x 2C f l f l +m l r V 2x 上式中,K γ为增益常数,S 为拉普拉斯算子,T γ为时间常数,δf 为前轮转角,m 为整车质量,Iz 为整车的横摆转动惯量,V x 为整车纵向速度,l f 为整车的质心到其前轴的距离,lr 为整车质心到其后轴的距离,l 为轴距,C f 为前轴轮胎的侧偏刚度,C r 为后轴轮胎的侧偏刚度.因轮胎力不能超过轮胎的附着极限,理想横摆角速度响应受附着极限的限制,所以,其上限应定义为:γd _b o u n d =μg V x(2)综上所述,理想横摆角速度响应可写为:γd =K γ1+T γs δf ,K γδf ɤγd _b o u n d γd =γd _b o u n d s g n K r δf ()1+T γs ,K γδf >γd _b o u n d ìîíïïïï(3)(二)控制方案在极限行驶工况下,单独使用理想横摆角速度跟随策略或汽车质心侧偏角抑制策略,都能够保持汽车的稳定性,但横摆角速度更容易通过传感器测得[8]547551.本文以更易测量的汽车横摆角速度为控制变量,控制系统采用分层控制方式,分为顶层横摆力矩控制器㊁中间层制动力分配器和底层滑移率调节器三部分.顶层横摆力矩控制器采用模型跟踪的控制思想,决策出附加横摆力矩,用以改善整车的横摆稳定性能,即汽车横摆角速度跟踪二自由度汽车参考模型输出的理想横摆角速度响应.中间层制动力分配器基于目标车轮选择规则的方式,决策出需要进行制动的目标车轮,根据实际横摆响应与理想横摆响应的对比确定目标制动车轮,确定规则,具体如表1所示(参见表1)[3]110[5]300308[6]723732.根据上层控制器输出的目标附加横摆力矩和实际与理想横摆响应状态的对比,实现顶层横摆力矩控制器输出的附加横摆力矩.底层滑移率控制器采用滑移率门限控制策略,调节中间层制动力分配器输出的制动力,以防止各个车轮抱死而影响整车横摆稳定性,其整个控制方案的逻辑结构如下图所示(参见图1).其中,顶层横摆力矩控制器采用P I D 控制中的比例控制,将整车的实际横摆响应与理想横摆响应的偏差作为控制器的输入,得到用以改善整车横摆稳定性的附加横摆力矩:әM =K P әγ(t )(4)上式中,K P 为比例控制增益.本文采用试凑法,确定了K P =1040.由于轮胎常同时作用纵向力和侧向力,其间互相影响㊁存在耦合关系.当滑移率在15%~20%时,轮胎能够提供较大的纵向力,同时其侧向附着系数也较大,能提供较大的侧向力,这时,汽车的横向稳定性较好[9]182190.本文选择滑移率门限控制方法控制各个制动车轮的滑移率.在实现中间层制动力分配器输出的制动力条件下,若目标制动车轮的滑移率不高于20%,则不需要经过底层滑移率调节器调节;否则,就应该进行调节,使目标车轮的滑移率保持在20%以下,以防止目标车轮发生抱死.47湖州职业技术学院学报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2019年表1㊀目标制动车轮确定规则理想横摆响应实际横摆响应横摆响应比较目标制动车轮γd ȡ0γ>0γd <γL 1γd >0γȡ0γd >γR 2γd ȡ0γ<0γd >γR 1γd <0γ>0γd <γL 1γd <0γɤ0γd <γL 2γd <0γ<0γd >γR1图1㊀控制方案逻辑结构图二、仿真分析本文采用车辆动力学仿真软件C a r S i m ,搭建了非线性整车仿真模型,应用数学专业软件M a t l a b ,建立了控制系统的控制器模型.C a r S i m 提供了与M a t l a b /S i m u l i n k 联合仿真的接口.C a r S i m 整车模型被封装成S i m u l i n k 的S -函数,从而实现了两者之间的数据连接,充分发挥了C a r S i m 整车建模的优势和M a t l a b 控制策略的设计优势.通过C a r S i m 整车模型与S i m u l i n k 控制策略联合仿真的方式实现本文控制方案的验证和分析,根据计算机仿真结果,可以快速地评价和调试控制策略[7]141148[9]182190.详细建模过程参考基于C a r S i m S i m u l i n k 联合仿真的汽车防抱死控制研究[10]8891.本文搭建的联合仿真模型如下图所示(参见图2):图2㊀C a r S i m-S i m u l i n k 联合仿真模型以连续两次单移线开环试验操作为仿真工况,模拟高速行驶时驾驶员连续两次换道超车操作,来验证本控制系统的有效性和可靠性.用两个周期的正弦信号模拟转向盘输入,信号幅值为60ʎ,周期为4s ,具体如下图所示(参见图3).初始车速为100k m /h ,路面附着系数为0.8.车辆横摆角速度响应如下图所示(参见图4),车辆质心侧偏角响应如下图所示(参见图5).可以看出:如果没有横摆稳定性控制系统的辅助作用,车辆的横摆角速度会急剧增加,质心侧偏角也会急剧增大,这时,整车的横摆稳定性较差,出现了横摆失稳.在对车辆施加横摆稳定性控制后,车辆的横摆角速度响应就能够较好地跟踪参考模型输出的理想响应,同时,质心侧偏角也较小,这时,整车的横摆稳定性也较好.从车辆运行轨迹(参见图6)和仿真动画对比(参见图7)可以看出:无横摆稳定性控制系统的辅助作用时,车辆发生了侧滑,不能够完成两次换道操作,还发生了横向失稳;施加控制后,车辆运行轨迹平顺,能够完成两次换道操作,稳定性也较好.57第2期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀康㊀南,等:基于联合仿真的汽车横摆稳定性控制系统研究㊀㊀㊀图3㊀方向盘转角输入㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀图4㊀整车横摆角速度响应㊀图5㊀整车质心侧偏角响应㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀图6㊀整车运行轨迹响应㊀㊀a ㊀无控制㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀b ㊀施加控制图7㊀仿真动画对比左下图给出了车辆各个车轮的主动制动力矩(参见图8),右下图给出了车辆各个车轮的滑移率(参见图9).可以看出:在不同时刻,在控制系统作用下,不同的目标车轮产生了制动力矩,实现了顶层控制器决策出的附加横摆力矩,改善了车身运行姿态;同时也未发生车轮制动抱死现象,对整车横摆稳定性的改善发挥了积极的作用.图8㊀各个车轮制动力矩㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀图9㊀各个车轮滑移率三、结㊀论本文采用C a r S i m 搭建了整车仿真模型,应用M a t l a b /S i m u l i n k 设计了控制系统,基于C a r S i m 与S i m u l i n k 联合仿真平台,主要探讨了汽车横摆稳定性控制系统的设计,验证了本文设计的横摆稳定性控制系统对改善汽车横摆稳定性的有效性和可靠性.主要得到以下结论:(1)C a r S i m 与S i m u l i n k 联合仿真平台能充分发挥C a r S i m 建模精度高和S i m u l i n k 设计控制策略简便的优点,是汽车稳定性控制系统设计开发的有效手段.(2)本文所提出的分层结构式整车稳定性控制策略,可以较好地改善汽车的横摆稳定性,有效地提高汽车行驶的安全性.(下转第81页)67湖州职业技术学院学报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2019年贯彻,自动转账凭证的可靠性将会更高.用户可利用系统提供的两种不同的自动转账功能来处理同一项会计业务.如,利用专项转账功能设置期末调汇凭证,同时利用自定义转账功能,采用提取外币余额与发生额函数及汇率系数构成的数据来源公式来定义调汇凭证,两种渠道生成的结果一致时才予以确认.这种方法看似额外增加了一道处理手续,但却使期末转账业务凭证的正确性更有保障.4.设置最佳操作时机与触发方式㊀为避免出错,软件对机制凭证的生成有时间或时机上的约束.如,汇兑损益结转功能只在期末可用,期间损益结转前所有损益类科目的发生额均需登账,本年利润结转功能只能在年末调用等等.有的软件允许用户对自动转账(特别是自定义转账)凭证的生成时序作出安排.对此,无论是时序控制还是凭证生成命令的触发,都需要会计人员根据自身的业务特点与核算需要来掌控.就拿采用计划成本控制的材料出库业务来说,计提减值准备㊁分配成本差异㊁暂估材料入账三者之间就需要有个时序安排.如果用户先行对货到单未到材料作了暂估入库处理,而后再计提减值准备或分摊成本差异,那么会导致估价入库材料被误提减值准备,或误算材料成本差异率,从而影响自动转账凭证数据的正确性;再如,材料入库业务是仓管审核签字即生成记账凭证,还是财务人员点击制单命令后生成记账凭证?这也需要根据相关人员的业务能力与内控要求来作出合理的安排.所以,尽管软件系统本身有一系列防范凭证错误的措施,当机制凭证的生成过程涉及会计核算的逻辑规则时,还得依靠比软件更具理性思维能力的操作人员来掌控.5.提高会计人员的职业敏感性㊀E R P 系统把多数本来由会计人员处置的核算事务揽在怀里,使核算事务脱离了具有严密思维和耐心细仔特点的会计人员的视线.但是,对于高效率地直接出现在眼前的核算结果,除了在充分了解系统功能基础上应该持有的信任,仍需要会计人员了解软件工作规则,提高业务洞察力和职业敏感性.会计人员对于机制凭证中出现的负向数值㊁小概率对应关系㊁超常数额等可疑因素,要能凭借对软件系统工作原理的认识以及对会计业务处理过程的知悉,对其作出初步的正确性判断.遇有疑点时,要能通过业务追溯找到验证方法,从而拒绝并纠正系统运用中因为设置定义不当而可能出现的错误.总之,作为新时代的会计人,在人与机器的日常交互为特点的新型会计工作模式中,既要享受系统的高效率与正确性,又应通过不断学习提高对系统的驾驭能力,从而使死守规矩的机器与软件辅佐会计人做出高度专业的会计账表.参考文献:[1]赵㊀静,朱㊀丹.正确评价财务机器人有助于会计行业健康发展[J ].经济师,2018(5).[2]师银萍.全面认识财务软件自动转账功能[J ].财会月刊,2013(19).[3]张有峰.E R P 系统中用户权限的设置规范与控制策略[J ].财会月刊,2017(10).[4]张有峰.财务软件核心功能解析[M ].北京:中国财政经济出版社,2010.(上接第76页)参考文献:[1]李㊀亮,贾㊀钢,宋㊀健,等.汽车动力学稳定性控制研究进展[J ].机械工程学报,2013(24).[2]吴刚院,刘㊀丹,陈娟娟.乘用车横向稳定性控制联合仿真[J ].汽车技术,2018(3).[3]Y A N G XJ ,WA N GZC ,P E N G W L .C o o r d i n a t e dC o n t r o l o fA F S a n dD Y C f o rV e h i c l eH a n d l i n g a n dS t a b i l i t y B a s e d o nO pt i m a l G u a r a n t e e dC o s tT h e o r y [J ].V e h i c l eS y s t e m D y n a m i c s ,2009(1).[4]王其东,刘㊀伟,陈无畏,等.基于路面识别的汽车稳定系统滑模控制[J ].汽车工程,2018(1).[5]杨秀建,王增才.基于线性变参数建模的汽车横摆力矩增益调度控制[J ].机械工程学报,2009(1).[6]WA N GJM ,R A U LGL .C o o r d i n a t e da n dR e c o n f i g u r a b l eV e h i c l eD y n a m i c sC o n t r o l [J ].I E E ET r a n s a c t i o n s o nC o n t r o l S ys t e m s T e c h n o l o g y ,2009(3).[7]杨秀建,康㊀南,李西涛.基于T r u c k S i m-S i m u l i n k 联合仿真的半挂汽车列车的稳定性控制[J ].公路交通科技,2013(3).[8]丁海涛.两种汽车稳定性控制策略的分析与比较[C ]ʊ中国汽车工程学会.2010中国汽车工程学会年会论文集.北京:机械工业出版社,2010.[9]杨秀建,康㊀南,刘明勋,等.半挂汽车列车横摆稳定性最优重构控制[J ].中国公路学报,2013(6).[10]康㊀南.基于C a r S i m-S i m u l i n k 联合仿真的汽车防抱死控制研究[J ].湖州职业技术学院学报,2018(1).18第2期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀张有峰:E R P 系统中机制凭证的影响因素及其控制策略。
基于横摆角速度的汽车ESP系统的仿真研究

【 主题词】 横摆角速度
稳定性
汽车
系统 、 制动 系统 模 型等 。整 车模 型建 立完 成 之后 , 通过 蛇形试 验对 模型 的合理 性进 行检 验 。
p id t r ae t e mo e fwh l e c e,a h n 2D r e m d a e il d li r ae l o d e t h d lo o ev hil e nd t e fe do i e lv h c emo e sc e td,t e od —
非 常直观 形 象 的 物 理 模 型 , 能够 比较 真 实 地 反 其 映 出汽 车动力 学特 性 。需 要建 立 的汽 车子 系 统模
型 有 : 后悬 系统 、 向 系统 、 前 转 发动 机 系统 、 后 轮 前
图 1 汽 车理想二 自由度参考模 型
图 1中 F 为前 轮所 受侧 向力 、 ∥ F 为后 轮所 受
I h s te i ,t i n t i h ss he smult n o P i s d o h a r t F rt he s f r a i fES sba e n t e y w ae. is ,t o t e ADAM S o wa /CAR s a — i p
收稿 日期 : 0 0— 9—1 21 0 3
・
l ・ 6
上海 汽 车
2 1 .2 0 0 1
侧 向力 ,。 u 为前轴 中点速度 , 后轴 中点 速度 。 Ⅱ为
基于线性二次型(LQ)控制的车辆稳定性控制系统(VSC)仿真
4.2.2 前馈控制器设计 ............................................. 17 4.2.3 参考模型设计 ............................................... 17 4.2.4 反馈控制器设计 ............................................. 18 4.3 仿真控制系统建模 ................................................ 19 4.3.1 轮胎模型 ................................................... 20 4.3.2 车辆模型 ................................................... 21 4.3.3 控制模块 ................................................... 21 4.4 本章小结 ........................................................ 22 5 控制系统的 仿真与分析 .................................................. 23 5.1 车辆模型仿真 ..................................................... 23 5.2 控制系统的仿真 分析 ............................................... 24 5.2.1 反馈控制器的 权重系数 对控制效果的影响 ....................... 25 5.2.2 稳定性控制阶跃仿真分析 ..................................... 27 5.2.3 跟随特性正弦仿真分析 ....................................... 35 5.3 本章小结 ......................................................... 38 6 全文总结与 展望 ........................................................ 40 6.1 全文总结 ........................................................ 40 6.2 展望 ............................................................. 40 致 谢 ................................................................... 42 参考文献 ................................................................ 43
汽车操纵稳定性一般建模和仿真流程
汽车操纵稳定性一般建模和仿真流程下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!汽车操纵稳定性建模与仿真流程汽车操纵稳定性是评估车辆安全性和舒适性的重要指标。
基于横摆力矩的汽车稳定性控制策略
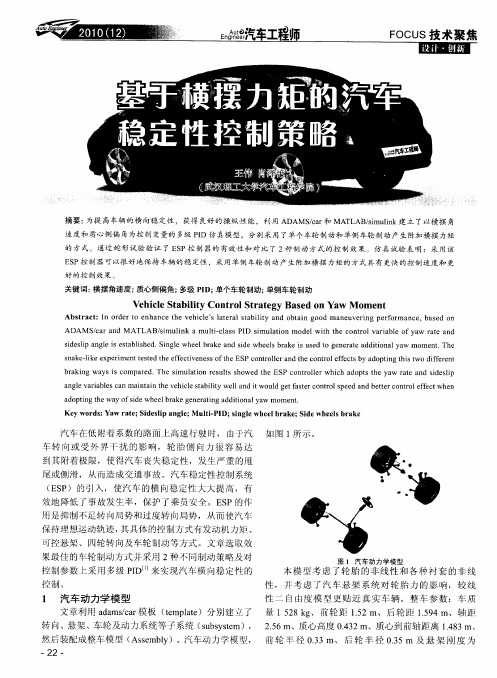
汽 车在 低 附着 系 数 的路面 上高速 行 驶 时 ,由于汽 如 图 1 示 。 所
车 转 向或 受 外 界干 扰 的 影 响 ,轮 胎 侧 向力 很 容 易达
到其 附着极 限,使得 汽车 丧失 稳定 性 ,发生 严重 的甩
尾 或侧 滑 ,从而造 成 交通 事故 。汽 车稳 定性控 制 系统
1 汽 车动 力学模 型
文章 利用 a a /a 模 板 ( mpa )分别 建立 了 量 15 8k 、前 轮 距 1 2m、后 轮 距 1 9 dms r c t le e t 2 g . 5 . 4m、轴 距 5
E P控 制 器 可 以很 好 地 保 持 车辆 的稳 定 性 ,采 用 单 侧 车轮 制 动 产 生 附加 横 摆 力 矩 的 方 式 具 有 更 快 的控 制 速 度 和 更 S
好 的控 制 效 果 。
关键词: 横摆角速度; 质心侧偏角; 多级 P D; I 单个车轮制动 ; 单侧车轮制动 Ve i l t b l y Co t o t a e y Ba e n Ya M o e h c e S a ii n r lS r t g s d o w m nt t
a op i g t ew a fsdew h e r keg ne a i g a d tn h y o i e lb a e r tn ddii al w o e t ton ya m m n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所制 定 的控 制 策略 可 以有效地 实现横摆 稳 定性 控 制 , 而且 减 小 了侧 向加 速度 , 使 汽 车具 有 一 定
的抗侧 翻 能 力 , 提 高 了汽车 的稳 定性和 安 全性 。 关 键 词: 电子稳 定控 制 ; 模 糊控 制 ; 直接 横摆 ; 侧 倾
Ve hi c l e S t a b i l i t y Co n t r o l S y s t e m
ou J i a n,Z HO U Xi n — h u a ,Z HA NG Yo n g ,DEN G G u o — h o n g
( C h o n g q i n g A u t o mo b i l e I n s t i t u t e , C h o n g q i n g U n i v e r s i t y o f T e c h n o l o g y ,C h o n g q i n g 4 0 0 0 5 4 ,C h i n a )
2 0 1 3年 2月
F e b .2 0 1 3
d o i :1 0 . 3 9 6 9 / j . i s s n . 1 6 7 4 — 8 4 2 5 ( z ) . 2 0 1 3 . 0 2 . 0 0 1
汽 车 稳定 性 控 制 系统 模 型 及 横 摆 控 制仿 真
欧 健, 周 鑫华 , 张 勇 , 邓 国红
中图分 类号 : U 4 1 6 . 6
文 献标 识码 : A
文 章编 号 : 1 6 7 4— 8 4 2 5 ( 2 0 1 3 ) 0 2—0 0 0 1— 0 5
Mo d e l i n g a n d S i mu l a t i o n o f Ya w Co n t r o l l i n g f o r
第2 7卷 第 2期
Vo l _ 2 7 No. 2
重 庆 理 工 大 学 学 报( 自然科学)
J o u r n a l o f C h o n g q i n g U n i v e r s i t y o f T e c h n o l o g y ( N a t u r a l S c i e n c e )
s a f e t y o f t h e v e hi c l e a r e e n h a n c e d. Ke y wo r ds:e l e c t r o ni c s t a b i l i t y c o n t r o l ;f u z z y c o n t r o l ;d i r e c t y a w ;r o l l
Abs t r a c t :Th e v e h i c l e r e f e r e n c e mo d e l ,a n d a 8- DOFs v e hi c l e d y n a mi c s mo d e l c o v e in r g y a w a n d r o l l mo t i o n a r e e s t a b l i s he d i n Ma t l a b / Si mu l i n k.Us i n g t h e me t h o d o f d i f f e r e n t s t a t e s o f y a w a n g l e,a d i r e c t
y a w c o n t r o l s t r a t e y g h a s b e e n p r o p o s e d b a s e d o n f u z z y c o n t r o l p in r c i p l e ,t h e n t h e s t a b i l i t y c o n t r o l o f t h e v e h i c l e E S C s y s t e m i s a c h i e v e d .T h e r e s u l t s o f i f s h h o o k t e s t s i mu l a t i o n s i n c h a r a c t e i r s t i c c y c l e s s h o w t h a t t h e d e s i g n e d c o n t r o l s t r a t e y g c a n e f f e c t i v e l y i mp l e me n t y a w s t a b i l i t y c o n t r o l a n d r e d u c e s l a t - e r a l a c c e l e r a t i o n .F u r t h e r mo r e ,t h e v e h i c l e’ S a n t i - r o l l o v e r c a p a c i t y i s i n c r e a s e d,a n d t h e s t a b i l i t y a n d
重庆 汽车 学 院 , 重庆 4 0 0 0 5 4 )
( 重 庆理 工大 学
摘
要: 在M a t l a b / S i m u l i n k中建立 了包括横摆运动、 侧倾运动 的八 自由度整车动力学模 型
和车辆参考模型。采用车辆横摆 角速度的状态差异法, 基于模糊控制理论制定 了直接横摆控制