【CN305380377S】智能无人驾驶巡检车【专利】
【CN109773808A】一种巡检机器人【专利】
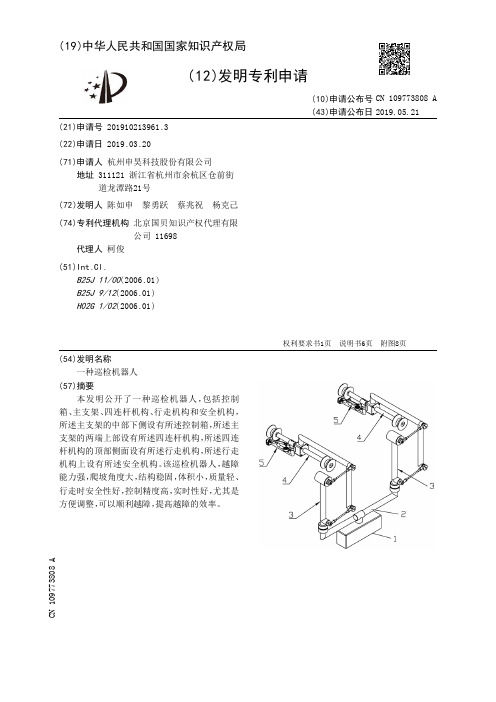
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910213961.3(22)申请日 2019.03.20(71)申请人 杭州申昊科技股份有限公司地址 311121 浙江省杭州市余杭区仓前街道龙潭路21号(72)发明人 陈如申 黎勇跃 蔡兆祝 杨克己 (74)专利代理机构 北京国贝知识产权代理有限公司 11698代理人 柯俊(51)Int.Cl.B25J 11/00(2006.01)B25J 9/12(2006.01)H02G 1/02(2006.01)(54)发明名称一种巡检机器人(57)摘要本发明公开了一种巡检机器人,包括控制箱、主支架、四连杆机构、行走机构和安全机构,所述主支架的中部下侧设有所述控制箱,所述主支架的两端上部设有所述四连杆机构,所述四连杆机构的顶部侧面设有所述行走机构,所述行走机构上设有所述安全机构。
该巡检机器人,越障能力强,爬坡角度大,结构稳固,体积小,质量轻、行走时安全性好,控制精度高,实时性好,尤其是方便调整,可以顺利越障,提高越障的效率。
权利要求书1页 说明书6页 附图8页CN 109773808 A 2019.05.21C N 109773808A权 利 要 求 书1/1页CN 109773808 A1.一种巡检机器人,其特征在于:包括控制箱、主支架、四连杆机构、行走机构和安全机构,所述主支架的中部下侧设有所述控制箱,所述主支架的两端上部设有所述四连杆机构,所述四连杆机构的顶部侧面设有所述行走机构,所述行走机构上设有所述安全机构。
2.根据权利要求1所述的一种巡检机器人,其特征在于:所述四连杆机构包括基座连杆、关节电机、升降杆驱动电机和升降支架,所述基座连杆的上部水平设置有升降杆驱动电机,所述基座连杆的下部竖直设置有关节电机,所述关节电机连接主支架,所述升降杆驱动电机连接有主动关节组件,所述主动关节组件连接于所述升降支架的上部,所述基座连杆的下部设有从动关节组件,所述从动关节组件连接于所述升降支架的下部。
一种智能巡检管理系统[发明专利]
![一种智能巡检管理系统[发明专利]](https://img.taocdn.com/s3/m/33bcf8310640be1e650e52ea551810a6f524c8a0.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810132730.5(22)申请日 2018.02.09(71)申请人 华能澜沧江水电股份有限公司糯扎渡水电厂地址 665000 云南省普洱市思茅区思茅港镇那澜村(72)发明人 刘润兵 徐剑 于洋洋 郑霜 覃川 (74)专利代理机构 北京华仲龙腾专利代理事务所(普通合伙) 11548代理人 李静(51)Int.Cl.G07C 1/20(2006.01)G06K 17/00(2006.01)G06Q 50/06(2012.01)(54)发明名称一种智能巡检管理系统(57)摘要本发明涉及一种智能巡检管理系统,它采用如下的方法步骤:步骤一:建立巡检系统服务器:采用如下步骤:步骤一:建立巡检系统服务器;步骤二:巡检系统服务器通过网络与电厂内网服务器相连,电厂内网服务器安装防水墙程序;步骤三:巡检系统服务器按不同角度给不同的巡检人员下发巡检任务,各个巡检人员通过移动巡检终端登陆巡检系统服务器,接收巡检系统服务器下发的任务信息;步骤四:巡检人员按不同角色进入巡检系统,进行运行和维护专业巡检;它融合了智能感知、移动应用、GPS定位、GIS地图跟踪、等先进技术和现代设备管理理念,具有能实现终端智能化、反馈及时化、操作便捷化等优点。
权利要求书1页 说明书5页 附图1页CN 110163988 A 2019.08.23C N 110163988A1.一种智能巡检管理系统,其特征在于:它采用如下的方法步骤:步骤一:建立巡检系统服务器:采用如下步骤:1)建立巡检系统服务器的功能架构:(1)生产运行管理系统接口管理模块建立:由管理模块由基础数据管理单元、巡检管理标准单元、巡检异常数据单元、巡检作业统计单元、巡检数据查询单元、巡检评价管理单元和系统配置管理单元组成;(2)巡检终端系统功能模块建立:由用户管理单元、巡检线路单元、数据采集单元、地点定位单元、智能提示单元、任务管理单元、数据上传下载单元、巡检查漏单元、录音功能单元、拍照功能单元、移动报缺单元、移动查询管理单元组成;2)中控室值班台增加两套设备巡检系统显示终端,与移动巡检终端实现远程互联,能实时记录掌握巡检人员位置、巡检轨迹和巡检项目,显示终端屏幕上能实时接收巡检人员传回的数据、图片、视频和声音等内容,形成记录数据库,以便运行值班人员及时掌握当值设备巡检进度、设备运行工况和设备缺陷情况;步骤二:巡检系统服务器通过网络与电厂内网服务器相连,电厂内网服务器安装防水墙程序;巡检系统服务器通过网络与电厂外网电脑相连;电厂内网服务器与电厂内网电脑相连;巡检系统服务器通过无线网络或4G、3G网络与移动巡检终端相连;步骤三:巡检系统服务器按不同角度给不同的巡检人员下发巡检任务,各个巡检人员通过移动巡检终端登陆巡检系统服务器,接收巡检系统服务器下发的任务信息;步骤四:巡检人员按不同角色进入巡检系统,进行运行和维护专业巡检,下载定期更新后的巡检内容到巡检仪,携带巡检仪进行巡检到指定位置扫描二维码、RFID标签;步骤五:巡检人员按照巡检仪提示的检查内容及注意事项进行逐一检查,用巡检仪或RFID标签读写笔进行测温、测振、拍照、录像等收集记录设备数据;步骤六:巡检完成后巡检仪自动保存巡检情况,并将巡检结果通过网络自动上传至巡检系统服务器中并存储,方便查询和管理。
一种轨道智能巡检机器人[实用新型专利]
![一种轨道智能巡检机器人[实用新型专利]](https://img.taocdn.com/s3/m/ce66de1ee3bd960590c69ec3d5bbfd0a7956d5ef.png)
(10)授权公告号 (45)授权公告日 2014.05.28C N 203616653U (21)申请号 201320839165.9(22)申请日 2013.12.19G05D 1/02(2006.01)(73)专利权人成都慧拓自动控制技术有限公司地址610041 四川省成都市高新区三环路冯家湾7-1-2(72)发明人鲜开义 宋晖(74)专利代理机构北京天奇智新知识产权代理有限公司 11340代理人郭霞(54)实用新型名称一种轨道智能巡检机器人(57)摘要本实用新型公开了一种轨道智能巡检机器人,包括云台模块、滚轮、驱动模块、控制模块和轨道,驱动模块和云台模块分别与控制模块对应连接;其特征在于:还包括上壳体、下壳体和集电器,驱动模块、控制模块、滚轮和集电器均安装于上壳体上,云台模块安装于下壳体的下端,滚轮置于轨道上,轨道的其中一端接入电源,集电器与轨道接触并将电源传输给驱动模块和控制模块,驱动模块控制滚轮运行。
本实用新型将轨道既作为机器人运行的轨道路径,也作为机器人电力能源的传输介质,从而实现为机器人在线提供电源的目的,大大简化机构,降低成本;由于能够在线获得电源,所以驱动模块能够直接为滚轮提供动力,实现无外露牵引的驱动结构。
(51)Int.Cl.权利要求书1页 说明书4页 附图1页(19)中华人民共和国国家知识产权局(12)实用新型专利权利要求书1页 说明书4页 附图1页(10)授权公告号CN 203616653 U1/1页1.一种轨道智能巡检机器人,包括云台模块、滚轮、驱动模块、控制模块和轨道,所述驱动模块和所述云台模块分别与所述控制模块对应连接;其特征在于:还包括上壳体、下壳体和集电器,所述驱动模块、所述控制模块、所述滚轮和所述集电器均安装于所述上壳体上,所述云台模块安装于所述下壳体的下端,所述滚轮置于所述轨道上,所述轨道的其中一端接入电源,所述集电器与所述轨道接触并将电源传输给所述驱动模块和所述控制模块,所述驱动模块控制所述滚轮运行。
【CN209581647U】一种自主导航的智能巡检车【专利】
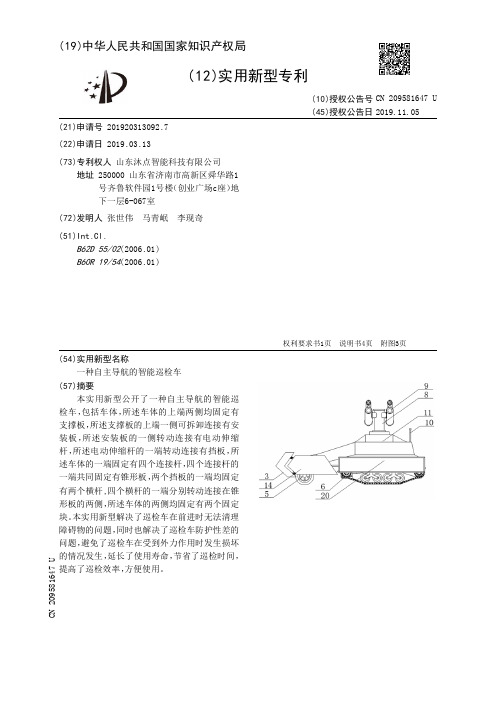
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920313092.7(22)申请日 2019.03.13(73)专利权人 山东沐点智能科技有限公司地址 250000 山东省济南市高新区舜华路1号齐鲁软件园1号楼(创业广场c座)地下一层6-067室(72)发明人 张世伟 马青岷 李现奇 (51)Int.Cl.B62D 55/02(2006.01)B60R 19/54(2006.01)(54)实用新型名称一种自主导航的智能巡检车(57)摘要本实用新型公开了一种自主导航的智能巡检车,包括车体,所述车体的上端两侧均固定有支撑板,所述支撑板的上端一侧可拆卸连接有安装板,所述安装板的一侧转动连接有电动伸缩杆,所述电动伸缩杆的一端转动连接有挡板,所述车体的一端固定有四个连接杆,四个连接杆的一端共同固定有锥形板,两个挡板的一端均固定有两个横杆,四个横杆的一端分别转动连接在锥形板的两侧,所述车体的两侧均固定有两个固定块。
本实用新型解决了巡检车在前进时无法清理障碍物的问题,同时也解决了巡检车防护性差的问题,避免了巡检车在受到外力作用时发生损坏的情况发生,延长了使用寿命,节省了巡检时间,提高了巡检效率,方便使用。
权利要求书1页 说明书4页 附图3页CN 209581647 U 2019.11.05C N 209581647U权 利 要 求 书1/1页CN 209581647 U1.一种自主导航的智能巡检车,包括车体(11),其特征在于:所述车体(11)的上端两侧均固定有支撑板(19),所述支撑板(19)的上端一侧可拆卸连接有安装板(2),所述安装板(2)的一侧转动连接有电动伸缩杆(1),所述电动伸缩杆(1)的一端转动连接有挡板(14),所述车体(11)的一端固定有四个连接杆(4),四个连接杆(4)的一端共同固定有锥形板(3),两个挡板(14)的一端均固定有两个横杆,四个横杆的一端分别转动连接在锥形板(3)的两侧,所述车体(11)的两侧均固定有两个固定块(7),所述固定块(7)上设有滑槽(13),所述滑槽(13)内设有调节装置,所述固定块(7)的一端转动连接有护板(20),所述调节装置的一端连接在护板(20)的一侧,所述车体(11)的上端设有红外避障设备(8)和摄像设备(9),所述车体(11)内设有导航设备。
一种工业巡检的智能小车[实用新型专利]
![一种工业巡检的智能小车[实用新型专利]](https://img.taocdn.com/s3/m/08ecc63f854769eae009581b6bd97f192279bf22.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201822039797.2(22)申请日 2018.12.06(73)专利权人 中国石油大学(华东)地址 266580 山东省青岛市黄岛区长江西路66号中国石油大学(华东)(72)发明人 纪仁桔 时海涛 房玉鑫 韩祖成 陈子维 (51)Int.Cl.G05D 1/02(2006.01)G01D 21/02(2006.01)(54)实用新型名称一种工业巡检的智能小车(57)摘要本实用新型公开了一种工业巡检的智能小车,包括机体,所述机体底端活动安装有安装架,所述安装架底面中部前端、后端均活动安装有安装杆,所述安装架底端的安装杆之间均活动安装有若干传动轮,所述传动轮上均活动安装有履带,所述机体顶端活动安装有转动体,所述转动体四周均活动安装有摄像头,所述转动体内部固定安装有中央处理模块,所述中央处理模块上分别固定安装有通讯模块、监控摄像模块、轮式行走机构模块、电源供电模块、机械操作模块、信息传输模块。
本实用新型通过在安装架底面中部前端、后端均通过安装杆活动安装有若干传动轮,且传动轮上均活动安装有履带,这样在运动时大大的提高了稳定性。
权利要求书1页 说明书3页 附图2页CN 209086753 U 2019.07.09C N 209086753U1.一种工业巡检的智能小车,包括机体(4),其特征在于:所述机体(4)底端活动安装有安装架(2),所述安装架(2)底面中部前端、后端均活动安装有安装杆,所述安装架(2)底端的安装杆之间均活动安装有若干传动轮(1),所述传动轮(1)上均活动安装有履带(20),所述机体(4)顶端活动安装有转动体(5),所述转动体(5)四周均活动安装有摄像头(6),所述转动体(5)内部固定安装有中央处理模块(7),所述中央处理模块(7)上分别固定安装有通讯模块(11)、监控摄像模块(12)、轮式行走机构模块(13)、电源供电模块(14)、机械操作模块(9)、信息传输模块(10),所述监控摄像模块(12)上分别固定安装有寻迹监控模块(15)、油气浓度检测模块(19)。
一种隧道智能无人机巡检系统及方法[发明专利]
![一种隧道智能无人机巡检系统及方法[发明专利]](https://img.taocdn.com/s3/m/618f620242323968011ca300a6c30c225901f0fc.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910526199.4(22)申请日 2019.06.18(71)申请人 武汉大学地址 430072 湖北省武汉市武昌区珞珈山武汉大学(72)发明人 杨文 张瑞祥 林诗杰 张恒 罗豪 (74)专利代理机构 武汉科皓知识产权代理事务所(特殊普通合伙) 42222代理人 魏波(51)Int.Cl.G05D 1/10(2006.01)G01D 21/02(2006.01)(54)发明名称一种隧道智能无人机巡检系统及方法(57)摘要本发明公开了一种隧道智能无人机巡检系统及方法,通过结合无人机技术、图像处理技术,将无人机应用到隧道的巡检工作中去。
本发明在无人机的平台上添加了多种传感器,利用单目黑白相机和惯性测量单元IMU采集的数据,根据VINS -Mono定位建图算法,同时采用多传感器数据融合的方式实现对隧道内无人机的精确定位导航,利用二维激光雷达采集点云数据,实现对隧道墙面方向的估计和无人机避障,同时利用高分辨率相机对隧道图像进行采集,通过SfM算法恢复相机运动轨迹,再结合高清图像生成隧道的三维模型,以此实现细致的隧道巡检任务。
相对于传统的依赖人员和车辆进行隧道巡检的方式,本发明自动化程度高、工作效率高,可以广泛地运用于隧道巡检工作中去。
权利要求书2页 说明书6页 附图3页CN 110262546 A 2019.09.20C N 110262546A1.一种隧道智能无人机巡检系统,其特征在于:包括无人机、飞行控制器、机载计算机、惯性测量单元IMU、单目黑白相机、高分辨率相机、单点激光测距仪、气压计、二维激光雷达和照明设备;所述飞行控制器用于控制所述无人机的起飞、移动、降落;所述机载计算机、单目黑白相机、惯性测量单元IMU分别与所述飞行控制器连接,用于计算视觉惯导里程计,对无人机自身进行定位导航;所述单点激光测距仪、气压计分别与所述飞行控制器连接,用于对无人机飞行高度的测量,实现稳定飞行;所述二维激光雷达和所述机载计算机连接,用于对隧道周围环境进行感知,实现有效地避障、对隧道曲折方向的估计以及实时路线调整;所述照明装置用于为隧道提供稳定的光照环境,由无人机的电池供电,安装在无人机的机架前端;所述高分辨率相机和所述机载计算机相连接,采集高分辨率的图像,用于稠密的三维重建;所述飞行控制器、机载计算机、惯性测量单元IMU、单目黑白相机、高分辨率相机、单点激光测距仪、气压计、二维激光雷达均固定安装在传感器放置架上,所述放置架固定设置在所述无人机的机架上方。
智能巡检车[实用新型专利]
![智能巡检车[实用新型专利]](https://img.taocdn.com/s3/m/13fe7bc23169a4517623a38f.png)
专利名称:智能巡检车
专利类型:实用新型专利
发明人:刘冶,李云龙,车显达申请号:CN201820894530.9申请日:20180608
公开号:CN207923179U
公开日:
20180928
专利内容由知识产权出版社提供
摘要:本申请涉及自动化检测技术领域,尤其涉及一种智能巡检车,通过雷达与距离传感器,能自行判断行驶位置,自动规避障碍物与巷道壁,实现自动行走、导向和避障,拍摄过程无需人为操作,完全无人值守、无人控制,自行检测;具有第一图像采集单元,可自行对车底结构进行拍摄检测,避开了人为操作等不确定因素的影响,有良好的检测准确率和执行效率。
申请人:北京华开领航科技有限责任公司
地址:102200 北京市昌平区科技园区超前路甲1号5号楼3层301室
国籍:CN
代理机构:北京开阳星知识产权代理事务所(普通合伙)
代理人:要然
更多信息请下载全文后查看。
铁路货运列车用巡检智能机器人[发明专利]
![铁路货运列车用巡检智能机器人[发明专利]](https://img.taocdn.com/s3/m/67b0e389970590c69ec3d5bbfd0a79563c1ed480.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010341117.1(22)申请日 2020.04.27(71)申请人 浙江库科自动化科技有限公司地址 314000 浙江省嘉兴市经济技术开发区昌盛南路36号嘉兴智慧产业创新园10幢602室(72)发明人 李积武 邓建军 熊开胜 汪建平 (74)专利代理机构 嘉兴启帆专利代理事务所(普通合伙) 33253代理人 程开生(51)Int.Cl.B25J 19/02(2006.01)B25J 11/00(2006.01)B25J 9/16(2006.01)B25J 19/04(2006.01)B61K 9/00(2006.01)B61K 9/02(2006.01)(54)发明名称铁路货运列车用巡检智能机器人(57)摘要本发明公开了一种铁路货运列车用巡检智能机器人,用于检测铁路货运列车,包括控制模块、红外成像模块、音频传感模块、定位模块、无线通信模块和机械臂驱动模块,所述控制模块分别与所述红外成像模块、所述音频传感模块、所述定位模块和所述无线通信模块电性连接,所述机械臂驱动模块接收所述控制模块传输的信号。
本发明公开的一种铁路货运列车用巡检智能机器人,其通过多种传感器智能地巡检铁路货运列车以及更好的人机互动,其还可以完成针对铁路货运列车的任务工作。
权利要求书2页 说明书4页 附图3页CN 111390974 A 2020.07.10C N 111390974A1.一种铁路货运列车用巡检智能机器人,用于检测铁路货运列车,其特征在于,包括控制模块、红外成像模块、音频传感模块、定位模块、无线通信模块和机械臂驱动模块,所述控制模块分别与所述红外成像模块、所述音频传感模块、所述定位模块和所述无线通信模块电性连接,所述机械臂驱动模块接收所述控制模块传输的信号;所述控制模块包括控制器U2,所述定位模块包括定位器U3,所述无线通信模块包括通信器U4,所述定位器U3的1管脚与所述控制器U2的29管脚电性连接并且所述定位器U3的2管脚与所述控制器U2的30管脚电性连接,所述通信器U4的7管脚与所述控制器U2的16管脚电性连接并且所述通信器U4的8管脚与所述控制器U2的17管脚电性连接;所述红外成像处理模块包括红外探测器U1,所述红外探测器U1的4管脚和5管脚之间分别并接有电阻RL和电阻RP,所述红外探测器U1的2管脚通过二极管VD2与三极管VT1的基极电性连接,所述三极管VT1的集电极因此通过二极管VD3和电阻R3与所述红外探测器U1的6管脚电性连接;所述机械臂驱动模块包括第一芯片U11、第二芯片U8和第三芯片U9,所述第三芯片U9的2管脚与电机MG2的负极电性连接并且所述第三芯片U9的3管脚与所述电机MG2的正极电性连接,所述电机MG2的负极一路通过二极管D11接电源并且所述电机MG2的负极另一路通过二极管D12接地,所述电机MG2的正极一路通过二极管D9接电源并且所述电机MG2的正极的另一路通过二极管D10接地。
油田智能巡检无人机控制系统[实用新型专利]
![油田智能巡检无人机控制系统[实用新型专利]](https://img.taocdn.com/s3/m/77fb8ff7a76e58fafab003e9.png)
专利名称:油田智能巡检无人机控制系统
专利类型:实用新型专利
发明人:杨则允,张全,杨来,刘宇辉,杨涛,王悦朋,刘建伟申请号:CN201820835066.6
申请日:20180531
公开号:CN208156514U
公开日:
20181127
专利内容由知识产权出版社提供
摘要:本实用新型公开了油田智能巡检无人机控制系统,其特征在于,包括空中子系统、地面站、地面后台处理系统,所述空中子系统包括位置锁定装置、高度计、航机控制装置、飞行控制单元,所述位置锁定装置、高度计连接飞行控制单元,飞行控制单元连接航机控制装置。
飞行控制单元通过天线通讯连接地面站,地面站通过串口通信连接地面后台处理系统。
油田智能巡检无人机合理有效的规划飞行路径,保证巡检任务的同时提高飞行效率;能够自动检测和躲避障碍,保证在巡检过程中安全飞行。
申请人:山东龙翼航空科技有限公司
地址:272000 山东省济宁市高新区诗仙路5678号园区
国籍:CN
代理机构:青岛发思特专利商标代理有限公司
更多信息请下载全文后查看。
一种火灾巡检无人车[实用新型专利]
![一种火灾巡检无人车[实用新型专利]](https://img.taocdn.com/s3/m/b161f7965acfa1c7ab00cc1c.png)
专利名称:一种火灾巡检无人车专利类型:实用新型专利
发明人:程顺利,顾辰冲,仇飞
申请号:CN201922063405.0申请日:20191126
公开号:CN211765934U
公开日:
20201027
专利内容由知识产权出版社提供
摘要:本实用新型涉及无人车技术领域,且公开了一种火灾巡检无人车,包括无人车,所述无人车的底部设置有履带,所述无人车的内部设置有处理器、循迹模块、摄像机、视频采集模块、无线传输模块、温度传感器、空气质量传感器、人体探测传感器和超声波传感器。
该火灾巡检无人车,履带它由轮毂、轮盘、胶带、滚珠轴承、轮轴盖、固定螺母、回绕挡油盖等组成。
负重轮数量多,可使每个轮子所承担的重量小,对地面的压力分布均匀,有利于提高机器人的通行性能,适合大多数地形使用,方便在火灾现场进行穿梭。
申请人:南京晓庄学院
地址:211100 江苏省南京市江宁区弘景大道3601号
国籍:CN
代理机构:淮安睿合知识产权代理事务所(普通合伙)
代理人:赵霎
更多信息请下载全文后查看。
一种地铁车辆列检的智能巡检系统[发明专利]
![一种地铁车辆列检的智能巡检系统[发明专利]](https://img.taocdn.com/s3/m/3b5af871a9956bec0975f46527d3240c8447a186.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201911081562.2(22)申请日 2019.11.07(71)申请人 成都铁安科技有限责任公司地址 610000 四川省成都市蛟龙工业港青羊园区东海路6座(72)发明人 杨凯 梁斌 高春良 谢利明 邓勇 王峰 廖伟 (74)专利代理机构 成都市集智汇华知识产权代理事务所(普通合伙) 51237代理人 冷洁(51)Int.Cl.G07C 5/00(2006.01)(54)发明名称一种地铁车辆列检的智能巡检系统(57)摘要本发明公开一种地铁车辆列检的智能巡检系统,包括远程控制台、现场控制中心和用于对车辆进行检测的巡检机器人,巡检机器人采用SLAM导航系统在地沟内进行路径导航及定位,并且地沟中设置有供巡检机器人在不同地沟之间转换的转运机构,现场控制中心接收远程控制台下发的检测命令将其解析并发送给巡检机器人,所述的巡检机器人在地沟内自动对地铁车辆进行检测并将检测数据反馈至现场控制中心进行分析处理得到检测结果,远程控制台从现场控制中心获取检测结果并展示。
本发明无需对检修库进行大规模改造,实施成本低,巡检机器人可在不同地沟间转换,一台巡检机器人可对多条检修轨道上的车辆进行检测作业,降低机器人投入数量,降低成本。
权利要求书1页 说明书5页 附图2页CN 110766825 A 2020.02.07C N 110766825A1.一种地铁车辆列检的智能巡检系统,其特征在于,包括远程控制台、现场控制中心和用于对车辆进行检测的巡检机器人,所述的巡检机器人采用SLAM导航系统在地沟内进行路径导航及定位,并且地沟中设置有供巡检机器人在不同地沟之间转换的转运机构,所述的现场控制中心接收远程控制台下发的检测命令将其解析并发送给巡检机器人,所述的巡检机器人在地沟内自动对地铁车辆进行检测并将检测数据反馈至现场控制中心进行分析处理得到检测结果,远程控制台从现场控制中心获取检测结果并展示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)外观设计专利
(10)授权公告号 (45)授权公告日 (21)申请号 201930099455.7
(22)申请日 2019.03.12
(73)专利权人 上海东古航空科技有限公司
地址 201315 上海市浦东新区南汇新城镇
环湖西一路99号主楼103B16室
(72)设计人 刘飞 何政道 徐宏哲
(74)专利代理机构 上海互顺专利代理事务所
(普通合伙) 31332
代理人 余毅勤
(51)LOC(12)Cl.
10-05
12-08
(54)使用外观设计的产品名称
智能无人驾驶巡检车
主视图
图片或照片 7 幅 简要说明 1 页CN 305380377 S 2019.10.11
C N 305380377
S
主视图
后视图左视图右视图
俯视图
仰视图
立体图
外观设计图片或照片1/1页
2 CN 305380377 S。