TCA测量机器人在大坝变形监测中的应用浅谈
TCA2003全站仪在拉西瓦水电站工程中的应用

垫! Q ! ! :
工 业 技 术
Sci nce e and Te chn o I ovaton ol gy nn i Her d al
T 0 CA2 3全 站仪 在 拉 西 瓦水 0
电站工 程 中的应 用
8 0 3 0) 1 0
徐 福 国 ( 西部 矿业 黄南 资源 开发有 限责任公 司 青海 西宁
进 行 交流 。
关键 词 : 施工控制 网 变形监 测网 全站仪 拉 西瓦水 电站 测量机器人 中图 分 类号 : V2 T 2 文 献 标 识 码 : A 文章 编 号 : 6 4 0 8 2 1 )6 a-0 5 -0 1 7 - 9 X( 0 0 () 0 1 4 2
水平 角 。 )
合格 合格 合格
平均值
大坝变形监测技术综述
大坝变形监测技术综述大坝是人类用于蓄水、发电、灌溉等目的的重要水利工程。
随着大坝的运行和使用年限的增加,大坝的变形监测逐渐成为确保大坝安全运行的关键任务。
本文将综述目前常用的大坝变形监测技术,包括测量原理、监测方法、优缺点以及应用案例等内容。
1. 测量原理大坝的变形监测通过测量大坝的形变变化来判断其安全性。
常用的测量原理包括全站仪测量、GPS测量、激光雷达测量、振动传感器监测等。
全站仪利用现代光学技术测量地面的三维坐标,可以测量大坝的形变位移。
GPS技术通过卫星信号测定接收器的三维坐标变化,精度较高。
激光雷达利用激光束扫描目标,通过测量反射回来的激光信号来计算目标物体的位置和形状。
振动传感器则通过测量大坝的振动,来判断其变形情况。
2. 监测方法大坝变形监测方法多种多样,可以分为定点测量和连续监测两种方式。
定点测量通常采用全站仪、GPS等测量仪器,在不同的时间点对大坝进行测量。
这种方法适合对局部区域或特定地点的变形进行测量。
连续监测则是采用激光雷达、振动传感器等设备,可以实时地监测大坝的变形情况。
这种方法适合对大坝整体的变形进行长期监测。
3. 优缺点不同的大坝变形监测技术有各自的优点和缺点。
全站仪测量方法精度较高,但需要专业人员操作,且测量时间较长。
GPS技术可以实时监测大坝的变形,但精度受到卫星定位精度的限制。
激光雷达测量方法速度较快,但在大坝表面有遮挡物时会影响测量结果。
振动传感器能够实时监测大坝的振动情况,但只能监测到振动造成的变形,无法测量其他形变。
4. 应用案例大坝变形监测技术在实际工程中得到广泛应用。
例如,中国的三峡大坝项目采用了全站仪、GPS和振动传感器等多种监测技术,对大坝的变形进行定期检测。
根据监测数据,可以及时发现大坝的异常变形,采取相应的维护和保护措施。
在国外,美国的背水坝坝体变形监测系统可以实时监测大坝的变形情况,并通过无线传输技术将数据传输到远程维护中心。
结论:大坝变形监测技术的发展与进步为大坝的安全运行提供了重要的保障。
GPS技术与TCA2003结合在变形监测中应用

GPS技术与TCA2003结合在变形监测中应用研究摘要:本文主要论述gps与tca2003结合在变形监测中应用,论述了整个系统的组成,系统的工作原理,gps基线向量与tca2003所测边和角组成边角网进行联合平差,以及监测后数据处理方法。
分析两种仪器的结合应用模式存在的问题,提出了相应的解决建议。
关键词:gps,tca2003,变形监测deformation monitoring using combination of gps andtca2003abstract: this paper focuses on the application combination of gps and tca2003 in deformation monitoring, and introduced the composition of the system, includinghigh-precision the feasibility of the gps net and operating modes, as well as data-processing methods, principle of operating tca2003 and the combination of deformation monitoring system. introduce main features of development monitoring data management system, and the data can be simple analysis explained.keyword: gps, tca2003, deformation monitoring,0引言自美国研发了全球定位系统(gps)卫星以来,gps技术已经逐步深入到我们的现代生活,差不多涉及到国民经济的各个领域,由于他能很容易地提供位置、速度和时间信息,所以会很快成为现代信息社会的重要信息来源。
大坝变形监测布网与数据分析

大坝变形监测布网与数据分析摘要:大坝的外部变形监测是整个水利枢纽安全监测的重要组成部分,其主要由基准点网、工作基点网、监测网三级观测组成。
目前主要采用大地测量方法,遵循分级布网逐级控制的原则进行平面控制网和高程控制网设计。
本文对黑河大坝安全监测网进行研究分析,并对坝体视准线平面和高程的监测数据进行了分析处理。
关键词:变形监测;监测网;数据处理与分析abstract: the dam external deformation monitoring is an important part of the whole dam safety monitoring, which is mainly composed of reference point network, basic network, monitoring network composed of class observation. at present mainly by geodetic methods, follow the grading network step by step control principle of plane control network and elevation control network design. this paper carries on the research analysis to the heihe dam safety monitoring network, monitoring data and collimation plane and elevation of the dam are analyzed.keywords: deformation monitoring; monitoring network; data processing and analysis中图分类号:x84 文献标识码:文章编号:一、引言黑河金盆水库,是西安市黑河引水系统的主水源,是一项以城市供水为主,兼有农灌、发电、防洪等综合效益的大型水利枢纽工程。
TCA测量机器人在大坝变形监测中的应用
( 福建 [ 程学院 建筑与规划系 , 福建 福州 30 0 ) 5 07
摘
要 : 年 来 我 国在 西 南地 区 , 划建 设 了许 多大 型 的 水 利 枢 纽 工 程 , 如 何 确 保 这 些 水 利 设 施 的 安 全运 营 , 近 规 但
成 了目前研究的热门课题。大坝 变形监测是 大坝安全监测 系统的一个主要项 目。本 文以紫坪铺 大坝 变形监 测
第3 3卷 第 3期
2 1 年 6 月 00
测绘 与 空 间地 理信 息
GEOMAT C & SP I NFOlM A ON IS AT AL l t Tl TECHNOL oGY
Vo . 3, . 1 3 No 3
J n ,2 1 u . 00
T A 测 量 机 器 人 在 大 坝 变 形 监 测 中 的应 用 C
0 引
言
1 工程 概 述
紫 坪铺 水利 枢纽工 程是 我 国实施 西 部大 开发 的 十大
现 阶段 变形监 测网 的施 测方 法 主要有 : 统 方法 、 传 测
量 机器人 方法和 G S方法。传统 方法 选用 测距 仪和 经 纬 P 仪 进行施 测 , 多都是 人工 观测 和记 录 , 大 对操作 人 员的技 能 和经验要 求相 当 高 , 容易产 生人 为粗 差 , 已跟 不上 现在 快节奏 、 低成 本的发展 趋 势 ; P G S具有 全 能性 、 全球 性 、 全 天候 、 连续 性 和实 时性 的特点 , 传统测 绘技 术 的革命 性 是
Th p ia i n o e Ap l to f TCA u v y Ro o n Da f r a i n M o io i g c S r e b ti m De o m t o n t rn
TCA2003测量机器人在水库大坝基准网测量中的应用

技 术在 李 家河 水利 枢 纽安 全监 测基 准 网 中的 实践应 用 , 对 其 成果精 度进 行 分析 , 结果 认 为 T C A 2 0 0 3测 量机 器人 用 于 变形监 测 工作 自动 化程 度 高 , 精 度 可靠 , 并能 大大 的提 高作 业 效率 。
[ 关 键词 ] T C A 2 0 0 3自动 全站仪 ; 监 测基 准 网布设 ; 监 测基 准 网观 测 ; 数 据处 理 [ 中图分 类号 ] P 2 5 8 [ 文 献标 识 码 ] B [ 文章编 号 ] 1 0 0 4一l l 8 4 ( 2 0 1 3) 0 6— 0 1 5 3— 0 3
位 8 8 0 . 0 m。
依 据 工程 要求 和规 模 , 监 测基 准 网 由 7座 具 有 强 制 对 中 标 志 的钢 筋混 凝 土 观 测墩 组 成 三 维 网 , 平 面精 度 为专 一 级 , 高 程精 度 为二 等 。
2 . 1 监 测 基 准 网 网 形 设 计
( 陕西 省水利 电力勘 测设 计研 究 院测 绘分 院 , 陕西 西安 7 1 0 0 0 2)
[ 摘 要 ] 外部 变形 监测 作 为水 利工程 安 全监 测 的 重要 组 成部 分 , 而T C A 2 0 0 3高性 能 精 密 全站 仪 自动 目标识
别 与 自动 跟 踪 技 术 的 应 用 , 使 得 外部 变形 监 测的技 术 手段 更 为先进 , 操 作 更 为 方便 。 采 用 T C A 2 0 0 3全 站 仪 自动 观 测
查 各 项误 差 , 超 限后 自动处 理 。能 完 全避 免 因外业 观 测 数 据 不合 格造 成 的复测 和 人为 造假 。
控制 网的精 度要 求 , 而且 提高 工作 效率 。
徕卡 TCA测量系统 说明书

徕卡测量系统TCA机载自动监测软件——大坝变形监测&滑坡变形监测概述与一般测量工作相比,变形监测具有观测目标多、测回数多、精度要求高等显著特点,所以,性能卓越、质量稳定的徕卡TCA系列全站仪成为变形监测的首选仪器,配以专用的机载软件,就可以进一步发挥和利用TCA全站仪的功能。
功能模块限差设置:可实现各项限差的设置(包括读数差、归零差、2C 互差、测回互差等(、实时检查与超限自动处理,能完全特点操作简单:正常情况下,无论有多少个方向、多少个测回,用户只需按一次键即可完成所有项目的观测;限差设置灵活:可以根据具体需要自定义各项限差,自动默认上次设置的限差值,通常无需修改;只需学习一次:对于同一个测站,只需在第一次观测时进行学习测量,以后观测时直接调用该测站的学习结果;全自动观测:完成各项设置后,仪器可自动照准各目标点,自动测距、测角,并实时检查各项误差,超限后自动处理。
能完全避免因外业观测数据不合格造成的复测和人为造假;后处理完善、规范:与之相配套的后处理软件可以自动生成与国家标准方向观测记录手薄完全一致的报表等功能。
各期原始观测数据采用SQL Server数据库进行管理,安全可靠,用户可以方便的查询、比较各期观测数据,并进一步进行被监测点的变形趋势预报。
适用仪器TCA1800/2003全站仪。
安装方式通过Leica Survey Office 安装到仪器。
滑坡变形监测:滑坡监测为掌握边坡岩石移动状况,发现边坡破坏预兆,对边坡位移的速度、方向等进行的监测,边坡监测的目的是对可能发生滑坡的危险边坡进行观测,查明滑动性质、滑体规模和准确预报滑坡等以确保生产安全,避免灾难性事故的发生。
大坝变形监测:变形监测是大坝安全监测中的主要项目,通过对坝体埋设的大量传感器进行准确测量,便可掌握大坝的状态,保证大坝的安全运行。
避免因外业观测数据不合格造成的复测和人为造假。
自动测量:同一测站,经过第一次学习测量后,仪器可自动照准各目标点,自动测距、测角,并实时检查各项误差,超限后自动处理。
大坝变形观测在大坝建设、管理运行中的作用
大坝变形观测在大坝建设、管理运行中的作用2012302660036 肖桥国际软件学院一、大坝变形的原因一般来讲,大坝变形主要是由两方面的原因引起的,一是自然条件及其变化,即建筑物地基的工程地质、水文地质、土壤的物理性质、大气温度等。
例如基础的地质条件不同,有的稳定,有的不稳定,会引起建筑物的不均匀沉陷,使其发生倾斜;建筑在土基上的建筑物,由于土基的塑性变形而引起沉陷;由于温度与地下水位的季节性和周期性的变化,而引起建筑物的规律变化。
另一种是与建筑物本身相联系的原因,即建筑物本身的荷重、建筑物的结构、形式及动荷载(如风力、震动等)的作用。
此外,由于勘测、设计、施工以及运营管理工作做得不合理,还会引起建筑物产生额外的变形。
这些变形的原因是互相联系的。
随着水工建筑物的兴建,改变了地面原有的状态,对于建筑物的地基施加了一定的外力,这就必然会引起地基及其周围地层的变形。
而建筑物本身及其基础,也由于地基的变形及其外部荷载与内部应力的作用而产生变形。
水工建筑物的变形按其类型来区分,可以分为静态变形和动态变形。
静态变形通常是指变形观测的结果只表示在某一期间内的变形值,也就是说,它只是时间的函数;动态变形是指在外力影响下而产生的变形,故它是以外力为函数来表示的动态系统对于时间的变化,其观测结果是表示建筑物在某个时刻的瞬时变形。
变形观测的任务是周期性地对观测点进行重复观测,求得其在两个观测周期间的变化量。
而为了求得瞬时变形,则应采用各种自动记录仪器记录其瞬时位置。
二、大坝变形观测的重要性随着我国水利水电建设事业的发展,筑坝数量已跃居世界之首,筑坝技术也日趋成熟。
到目前为止,筑坝总数约86000余座,其中15m以上的高坝约有18000多座,10om以上的有20多座,水电站装机容量在1.2万kw以上的大坝有136座。
已建成的150m高的高坝中有龙羊峡、乌江渡、东江、白山和刘家峡等大坝,还有一批高坝如二滩、紧水滩、安康、东风、天生桥等正在建造中。
大坝安全监测技术的创新应用
大坝安全监测技术的创新应用大坝,作为水利工程的重要组成部分,承载着防洪、发电、灌溉、供水等重要使命。
其安全运行不仅关系到人民生命财产安全,也对经济社会的稳定发展具有重要意义。
而大坝安全监测技术,则是保障大坝安全的“眼睛”和“耳朵”,通过对大坝各种物理量的监测和分析,及时发现大坝可能存在的安全隐患,为大坝的运行管理和维护提供科学依据。
随着科技的不断进步,大坝安全监测技术也在不断创新和发展,为大坝的安全运行提供了更加强有力的保障。
一、传统大坝安全监测技术在过去,大坝安全监测主要依靠人工观测和简单的仪器设备。
例如,通过水准测量来监测大坝的沉降,通过经纬仪测量来监测大坝的水平位移,通过应变计和测缝计来监测大坝的内部应力和裂缝变化等。
这些传统的监测方法虽然在一定程度上能够反映大坝的运行状态,但存在着监测精度低、监测频率少、数据处理复杂等缺点,难以满足现代大坝安全管理的需求。
二、现代大坝安全监测技术的创新(一)传感器技术的发展传感器是大坝安全监测系统的核心部件,其性能的优劣直接影响着监测数据的准确性和可靠性。
近年来,随着传感器技术的不断发展,各种新型传感器不断涌现,如光纤传感器、GPS 传感器、智能传感器等。
光纤传感器具有抗电磁干扰、耐腐蚀、高精度、分布式测量等优点,能够实现对大坝结构的全方位监测。
例如,通过光纤光栅传感器可以测量大坝混凝土的应变和温度,通过分布式光纤传感器可以监测大坝的裂缝扩展和渗漏情况。
GPS 传感器则能够实现对大坝表面位移的高精度测量,不受天气和通视条件的限制。
通过在大坝上布置多个 GPS 监测点,可以实时获取大坝的三维位移信息,为大坝的稳定性分析提供重要依据。
智能传感器则具有自诊断、自校准、自补偿等功能,能够提高传感器的可靠性和稳定性,减少人工维护的工作量。
(二)数据采集与传输技术的进步传统的大坝安全监测数据采集通常采用人工读数或有线传输的方式,效率低下且容易受到环境因素的影响。
随着信息技术的发展,无线传输技术和自动化数据采集系统得到了广泛应用。
TCA2003
3 4
20 0 2年 4月 2 日 0
水 电 自 动 化 与 大 坝 监 测
第 2 6卷
第 2期
T A2 0 C 0 3全 站 仪及 其在 二滩 大 坝 外 部 变 形 监 测 中 的பைடு நூலகம் 用
赵 景 瞻
( 都 广 达 水 电 工程 技 术 开 发公 司 ,四川 省 成 都 市 6 0 6 ) 成 1 0 1
等 编程 语言 编 程 , On l e 式 下 , 在 —n 模 i 以一 定 的通 信 方式 能 方便地 用 P C机 控 制 仪 器 , 成 各 种 自 动 完 测量; e _采 用 国 际 个 人 计 算 机 标 准 存 储 卡—— P MCI 卡 做载 体 记录 数据 , 可记 录在 仪器 的 内 C A 也 存 中, 通过 R 3 S 2 2接 E 将数 据 传 输 到 P l C机上 , 进 行 观测 数据 的后处 理 。 T A2 0 C 0 3全站 仪 的测量 原 理可简 单 表述 为 : 在 测量 前 , 向仪器 安 置测站 点和 观测 点 的坐标 参数 , 由 仪 器 自动 反算 , 完成 测站 点 至各监测 点 的方 位角 ; 在 测 站上 瞄准 观测 点 的起始 方 向 , 器在 AT 功能 仪 R 下 , 自动依 序按 方位 角差 的大小 , 将 由小到 大按 序进
近年来 , 国大 型工 程 建 ( 筑 物 的规 模 不 断 我 构) 扩大 , 数量 不 断增 加 , ( ) 建 构 筑物 ( 如大 、 中型 水坝 )
的施工 建 造及 安 全 运行 都 迫 切需 要 进行 适 时监测 。
行 测量 , 从而 可编 程 , 实现人 工智 能采 集观测 数据 ; c .接 收 系统 采用 C D元 件 , L K 模 式 下 C 在 OC 会 自动 识别 目标 和 锁定 目标 , 不受 其 他 杂散 光 源 干
移动式测量机器人在大朝山5#滑坡体变形监测应用论文
移动式测量机器人在大朝山5#滑坡体变形监测中的应用摘要:介绍了移动式测量机器人在大朝山5#滑坡体变形监测中应用的基本情况,实际应用表明,采用移动式测量机器人对该滑坡体进行监测,具有观测速度快、自动化程度和观测精度高等特点,并可同时获得每个变形点的平面位移和垂直位移信息,克服了以往平面位移监测和垂直位移监测分别进行的缺陷。
关键词:测量机器人;移动式;滑坡;变形监测【中图分类号】tp240 引言测量机器人是一种能代替人进行自动搜索、跟踪、辨识和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型电子全站仪。
它是在全站仪基础上集成步进马达、ccd影像传感器并配置智能化的控制及应用软件而发展形成的。
在工程建筑物及滑坡的变形自动化监测方面,测量机器人已逐渐成为首选的自动化测量技术设备。
测量机器人变形监测系统由基站、参考点、目标点、专用软件和计算机组成,是基于一台测量机器人的有合作目标(照准棱镜)的变形监测系统。
利用测量机器人进行滑坡的自动化变形监测,按监测方法可分为固定式持续监测系统和移动式周期监测系统。
固定式持续监测系统一般在测站上建立测量机器人监测房,配设供电、控制、计算、通信装置中心,而移动式周期监测系统只需测量机器人在每个测站上对周围目标点作周期观测,再用带有后处理软件的计算机进行数据处理即可。
前者的优势是全自动、实时在线监测,然而系统相对复杂,造价昂贵,一方面这些昂贵的系统设备只能长期用于一个固定的变形监测项目,而且需要采取特殊方式进行保护管理并定期检测修复,另一方面没有多余观测量,测量的精度随着距离的增长而显著降低,且不易检查发现错误;后者是一种半自动变形监测系统,工程数据管理轻便灵活,测量精度高,周期测量后仪器即可拆除,适合半人工作业、变形缓慢需定期测量的工程项目,与传统作业方式大同小异,但是效率提高了3~4倍,在替代传统变形监测系统方面有着显著的优势,这种模式常采用测量机器人机载半自动化外业观测软件加计算机后处理软件共同构成。
莱卡TCA2003测量机器人操作手册
TCA2003测量机器人变形监测操作手册王海滨刘朋俊(黄委会设计院测绘总队,郑州450003)一、测量机器人变形监测系统的地位和作用近年来电子工业的迅速发展,带动新型的精密电子测量仪器不断出现,为测绘行业提供了新的技术和方法.随着精密电子仪器的出现,变形监测也出现了新的变革和发展。
工程测量常规的经纬仪和电磁波测距仪已经逐渐被电子全站仪所替代,电脑型全站仪配合丰富的软件向全能型和智能型方向发展,形成了TPS(Totalstation Position System)系统。
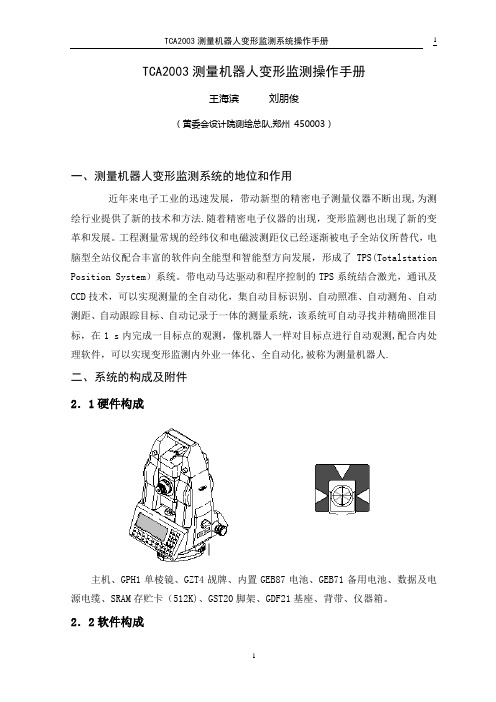
带电动马达驱动和程序控制的TPS系统结合激光,通讯及CCD技术,可以实现测量的全自动化,集自动目标识别、自动照准、自动测角、自动测距、自动跟踪目标、自动记录于一体的测量系统,该系统可自动寻找并精确照准目标,在1 s内完成一目标点的观测,像机器人一样对目标点进行自动观测,配合内处理软件,可以实现变形监测内外业一体化、全自动化,被称为测量机器人.二、系统的构成及附件2.1硬件构成主机、GPH1单棱镜、GZT4觇牌、内置GEB87电池、GEB71备用电池、数据及电源电缆、SRAM存贮卡(512K)、GST20脚架、GDF21基座、背带、仪器箱。
2.2软件构成2.2。
1 系统软件(Syytem Software)包括所有的基本功能;2.2。
2 随机应用软件(Application Software)支持特殊的应用测量;2。
2。
3 机载Inspector V1.0数据采集软件。
2.2。
4 变观准备应用软件三系统的特点和优点3.1 TCA2003的精度及功能特点TCA2003标称测角精度0.5秒,测距精度(1mm+1ppm*D)(D为被测距离),测程范围:在一般条件下,单棱镜可达2500米,三棱镜可达3500米。
TCA仪器由马达带动,在望远镜中安有同轴的自动目标识别(ATR1)装置,采用内置的ATR1发射激光束,经过反射后由内置的CCD像机接收,相对于CCD像机中心点位置被计算,其偏移量被用来控制仪器马达,转动仪器以便精确照准棱镜,并可对水平角和垂直角进行改正。
滩坑水电站大坝安全变形监测

浅析滩坑水电站大坝安全变形监测摘要:变形监测就是利用专用的仪器和方法对变形体的变形现象进行持续观测、对变形体变形性态进行分析和变形体变形的发展态势进行预测等的各项工作。
大坝变形是坝体和基础状态的综合反映。
也是衡量大坝运行时结构是否正常、安全、可靠的重要标志。
因此,变形监测一直被列为大坝的主要观测项目,特别受到运行管理单位的重视。
关键词:滩坑水电站;大坝安全;变形监测中图分类号:[tm622]文献标识码:a文章编号:引言建筑物的下沉,除绝对下沉外,变形的速率也十分重要。
对一般建筑物而言,只要变形缓慢且均匀,大多数都可以承受较大的变形而不致破坏。
通过对滩坑水电站大坝变形监测及对监测数据的分析可以看出,大坝的监测设施布置较合理,所获得的监测数据真实、可靠,大坝的位移量在规定的限度内,并由此掌握了大坝的变形动态,提前预测大坝变形的轨迹,为电站的安全生产提供可靠的保障。
1.工程概况滩坑水电站位于浙江省青田县境内的瓯江支流小溪中游河段,是瓯江流域水电梯级开发规划中的一座重要骨干电站。
滩坑水电站担负浙江省电力系统调峰、调频、调相及事故备用任务,同时兼顾防洪,并具有其他综合利用效益。
滩坑水库具有多年调节性能,电站装机容量3×200mw+4mw,保证出力84.1mw,年发电量9.6亿kwh,年利用小时1606h。
滩坑坝址以上河长187km,控制流域面积3330km2,占小溪流域面积的93.1%。
水库校核洪水位169.15m,总库容41.90亿m3;正常蓄水位160.00m,相应库容35.20亿m3;防洪高水位161.50m,台汛限制水位156.50m,防洪库容3.50亿m3;死水位120.00m,调节库容21.26亿m3。
滩坑水电站工程枢纽由拦河坝、溢洪道、泄洪洞、引水系统、发电厂房、升压开关站等组成。
2.变形监测方案设计2.1表面变形监测表面变形监测主要从两方面展开工作,一是进行大坝水平位移监测,另一是进行大坝沉降监测。
TCA2003自动化全站仪在乌鲁瓦提变形监测中的应用
接, 用传输程序将记录文件从 P 卡上传输到 电脑 C
・
2 ・ 4
李建东, 吴国强, 于秋 月: C 2 0 T A 0 3自动化全站仪在乌鲁瓦提变形监测中的应用
显著性分析、 回归分析等处理, 生成观测成果表 。
3 成果分析
3 1 大坝片区变形分析 .
中。 2 3 测量 数 据 后 处 理 .
顶、 主坝坝顶 下游分别埋设 了 8 、 个 4个、8个变形监 2
测点 ( 其中 : 主坝坝体下游 L 6系列 l D 2个监测点 。 为 1 6 m高程 ;U7 6 9 L 系列 7个监测 点, 1 4 m高程 ; 为 1 9
下运行, 并将数据存储在 A c s c s数据库中, D f e 以 x 作 为图形交换格式存储图形 。整个系统使用方便, 模型 完善 , 界面美观, 操作简便 。
等单位采用光学经纬仪及红外光电测距仪。 经人工照 准读数、 工记 录 而完 成。这 种操 作 不仅 劳 动强 度 人
大, 耗时长, 而且 人工记 录可能 产生差 错。并 且受 测
量人员技术 水平 、 经验 及 工作方 法 等 因素 的影 响 较
大。
自采用 "_20 IA 03自动化全站仪进 行大坝外部变 V 形监 测后 , 完成一期测量任务 的时 间较以往缩短 了一
该仪 器测 角精度 为 05测距精 度为 1IT±1pm。 ., II p T I 由于其 操作简便 、 度高、 精 稳定性和可靠性强等特 点, 在水利枢 纽工 程变形监测 中得到 了广泛应用。 乌鲁 瓦提前期变 形监 测 由新疆水 电勘测设 计院
ቤተ መጻሕፍቲ ባይዱ
坝顶、 泄洪洞 闸井 、 高边坡 各为 一个 片区 。采用 前 方 交会 法进行 观测, 角 9 测 个测 回, 测距 1 2个测 回。将 T A 03 C 20 全站仪 在基 准 点 的仪器 墩 上调 平 , 某一 在 片区的变形 点将所有 棱镜 瞄准仪 器方 向。开启 全站 仪, 仪器进入 自检状态。 自检完毕, 人工调用文 件, 仪 器开 始 自动 瞄准 目标 点, 测量水 平角 、 顶距 、 距, 天 斜 并以 G I 据格 式 自动记 录 在 P S数 C卡上 。观 测工 作 完成后, 可通 过数 据传 输 线将 全 站仪 与 台式 电脑连
TCA2003全站仪在大坝变形监测中的应用
超限时便 自动报警 ,再 自动返工重测 ,直至最终得 到合格的观测数据文件。文件可以输入计算机,方
便对 数据进 行计算 处理 。 TC A2 0 0 3全站仪 具有 以下特点 :
和普及 ,一些传统测量中遇到的问题得到了很好的 解决 ,全 站仪 在水 电站变形 观测 中发挥 了越来 越重
可 靠等优 点。在 紧水滩大坝 变形 监测 中,建 设初期 采 用 了 WI L DT 3光 学经纬仪及 ME 3 0 0 0测距仪 ,
2 0 0 5年开始 采 用 T C A2 0 0 3全站仪 及配套软 件 ,根据近年 来的应 用对 比 ,验证 了 T C A 2 0 0 3全站仪 的 优越性 ,并提 出 了需要 注意的相关问题 。
发射激光 , 激光被棱镜反射 回来 , 由C C D相机捕获 , 计算 出反射光 的中心位置 ,并换算成水平角 ( 或垂
直角) 改 正数 , . 根 据 改正数 由伺服 马达 步进 到棱 镜 的 中心位置 ,精 确瞄准 、 自动 记录观 测数据 。
一 一
容1 3 . 9 2 亿 m ,装机 3 0 0 Mw。坝址地 质为花 岗
测定出晶体振荡器的温度与频率变化特征并建立数 学模型 , 从而对实际条件下频率及测距值进行修正,
以达 到精 确测距 的 目的 。
T C A 2 0 0 3 全站仪 的测量原理 可简单表述 为:
在测量 前 , 向仪 器安置 测站 点和观 测点 的坐标参 数 ,
2 T C A全站仪在紧水滩大坝变形中的应用
要 的作 用。
( 1 )该系统采用新型垂直轴液体补偿器 ,使仪 器的竖轴、横轴和视准轴误差获得精确补偿 ,加上
独 特 的静 态条码 式码盘 测角 技术 ,不但具有 开机 无
测量机器人论文:基于测量类型机器人的自动变换监测系统研究
测量机器人论文:基于测量类型机器人的自动变换监测系统研究摘要介绍了与tca2003测量机器人相关的技术组成和软件编程的环境,着重研究了测量机器人变形监测自动化系统的组成和软件设计,对所开发的机载专业应用软件的主要功能、工作界面以及应用效果进行了阐述。
关键词测量机器人;geobasic;功能模块;自动化监测系统随着测量类型机器人的出现,测绘计量的工作效率被大大地提高了,从而减少了人们用肉眼进行观测所带来的不利影响,而且测量机器人拥有一个非常开放的开发设计平台,可以为解决某些特殊的工程提供比较方便比较快捷的软件,使那些研制出来的测量机器人可以严格地按照我们所设计的方案跟所提出的要求完成工作,这些工作都是以前的人工观测所不可能完成的。
1测量机器人的简单介绍测量机器人指的就是一种可以代替人工实行自动地搜索、定位跟踪、准确辨识和精确扫描目标并能够获得角度上、距离上跟三维坐标上这些细微信息的使用电子系统记录全程的仪器设备,它就是处在全站仪的基础之上集成了步进的马达、ccd影像的传感器所构成的视频成像系统,并配置了电脑智能化的相关控制的应用软件。
在这一系列的前提下发展就形成了测量机器人。
徕卡公司tca系列的全站仪可以自动恢复整平、自动进行调焦、自动在正倒镜里观测情况、自动地改正错误、自动地记录观测所获得的数据。
同时测量机器人所独有的一种名为atr的模式,这种模式使得全站仪可以自动地识别目标,这样的话,就不要求操作人员能精确地瞄准目标,只要粗略地瞄准棱镜之后,测量机器人就可以迅速地搜寻到所需瞄准的目标,并自动进行瞄准,从而就在一定程度上提高了一般的工作效率。
2geobasic语言的简单介绍geobasic就是徕卡公司专门推出的主要是用于tps系列的测量机器人机载应用程序所开发的一系列编程语言,基本上它的结构就类似于现在被普遍应用的标准basic的编程语言。
不管之前任何类型的一些电子测量仪器是多么得先进,它都是仪器自己携带一些程序或者相关的功能,而用户却只能被动地来接受,被动地对它进行使用操作,这样的话,就极大程度上局限了测量机器人的功能范围,抑制了测量人员的操作主动性。
TCA2003全站仪在NHS水库大坝外观变形监测中的应用
大 坝 外 观 变 形 监 测 工 作 是 要 即 时获 得 大 坝 在 不 同情 况 下
模 式下 ,以一定 的通信方式能方便地用 P 机控 制仪器 ,完 C
成各 种 自动测 量 ; ( )采 用 计 算 机 标 准 存 储 卡 记 录 数 据 , 可 记 录 在 仪器 4 也
的变形状况与变形趋势 ,因此在大坝变形 区以外 ( 即非变 形 区)必需建立监测控制 网,并要对其进行定期测量 。这项 工
摘
要 : C 0 3全站仪被人们称为测量机器 人,它依靠伺服马达 驱动 , A R功能下实现 自动搜索 、锁定 目标 , T A2 0 在 T
按 规 定 测 回数 读 数 、 计 算 、 检验 限差 、预 报 超 限成 果 ,记 录 、 存 储 数 据 。 文 中运 用 T 2 0 CA 0 3全 站仪 在 NHS 大 坝
率 地 做 好 大 坝 外 观 变 形监 测项 目 ,我 国 已 有 一 些 大 坝 将 具 有
自动搜索、 定 目标 、自动观 测及 记录等多 功能 的 T A2 0 锁 C 0 3
全 站 仪 成 功 地 应 用 于 大 坝 的 外 部变 形监 测 。 故 本 文 要 探 讨 的是 运 用 T A2 0 全 站仪 对 NHS 水 库 C 03 大 坝 的外 部 变 形 情 况 的 监 测情 况 。
为 观 测 大 坝 外 部 变 形 ,需 要 选 择 监 测 点 ,并 应 选 择 稳 定 性 非常 好 的 工作 基 点 。 工 作 基 点 的 坐 标 是 通 过 布 设 以一 定 的 儿 何 图形 构 成 的平 面 控 制 基 准 网来 推 算 的 。
( )安置了精密伺服 马达 ,在测量水平角或竖直角时 , 1
作 一 般 在 实 施 变 形 监 测 工 作 以前 就 要 完成 。特 别 是对 大 、 中
TCA2003全站仪在拉西瓦水电站工程中的应用
TCA2003全站仪在拉西瓦水电站工程中的应用摘要:TCA2003全站仪是近几年问世的测量机器人。
利用它对大中型水电站施工控制网、变形监测网进行外业观测,具有精度高、功效高、所获取的数据准确可靠等优点。
在拉西瓦水电站施工测量控制网及其变形监测网施测过程中使用TCA2003全站仪的经验和同行进行交流。
关键词:施工控制网变形监测网全站仪拉西瓦水电站测量机器人近年来,我国大型建筑物的规模不断扩大,数量不断增加,建筑物在施工及其运行过程中都迫切需要进行适时监测。
对于大中型水电站来说,两岸峡谷陡峭、垂直落差大,高等级控制网观测、外部变形监测至关重要,通过长期数据观测进行分析,对于水电站在施工和运行阶段提供安全保证。
为了提高工程质量水平,我们利用有自动搜索、自动观测、自动记录等多功能的TCA2003全站仪进行拉西瓦施工测量控制网复测、外部变形监测。
1 TCA2003全站仪简介TCA2003全站仪是一种高精度全站仪(测距标称精度为±(1mm+1×10-6D)、绝对编码度盘的经纬仪(测角标称精度±0.5″))和较大容量计算机技术相结合的全站仪。
该仪器由伺服马达驱动,在机载系统软件控制下完成自动识别目标、测量(水平角、垂直角和距离)目标和记录观测数据。
因此,TCA2003全站仪不仅具有一般全站仪的测角(水平角、竖直角)、测距和自动记录的功能,而且在仪器的结构和功能上有以下几方面较大的改进和发展。
(1)安置了精密伺服马达,在测量水平角和竖直角时,可人工按键,也可有编程控制,伺服马达将按需要转动仪器照准部进行观测;(2)在望远镜中安装有同轴自动目标识别装置(ATR),可自动识别目标(棱镜)、自动瞄准棱镜进行测量,从而可编程控制仪器自动采集数据。
(3)接收系统采用CCD元件,在LOCK模式下会自动识别目标和锁定目标,不受其它散光源干涉,能进行跟踪测量;(4)有完善的On-line指令,用户可根据实际需要方便地运用Visual Basic、Visual C++、PASCAL等语言编程,在On-line模式下,以一定的通讯方式能方便的用PC机控制仪器,完成各种自动测量;(5)采用标准存储卡——PCMCIA卡做载体记录数据,也可记录在仪器的内存中,通过RS-232接口将数据传送到PC机上,进行数据后续处理。
智能化测绘技术在地铁结构安全监控中的应用
智能化测绘技术在地铁结构安全监控中的应用摘要:自动化监测可节约人工成本,实现高频率数据采集。
目前,80%的地铁投运城市已经实现地铁保护区的监测监护工作自动化;其中,苏州、杭州、深圳等城市已全面推广。
测量机器人及其他物理传感器可快速获取隧道断面离散点的监测数据;而移动式三维激光扫描技术可使隧道空间检测领域的点线分散获取方式转为连续数据获取方式;其提升了数据获取的量级和效率,推动数据获取和数据处理的过程日益全面化、智能化。
基于此,对智能化测绘技术在地铁结构安全监控中的应用进行研究,仅供参考。
关键词:地铁;隧道结构;智能化测绘;运营期引言众所周知,测绘的主要任务是测量和表达各种自然要素、文化现象和人工物体的多维空间分布、多重属性和随时间的动态变化。
因此,需要利用各种先进的技术手段和工具来开展收集、处理、分析、提交、管理和成就服务等活动。
因此,测绘是一个技术密集型产业,技术进步对提高生产效率和服务水平起着重要作用。
中国测绘经历了从模拟测绘技术到数字测绘技术的重要转变,并逐步实现了全行业的数字化转型,促进了数字产品生产和服务体系的全面建设,推动了地理信息产业的大力发展。
然而,近年来,这种数字化测绘技术的红利基本耗尽,测绘生产和服务面临着许多新的挑战,如实时数据采集、信息处理自动化、基于知识的服务应用等。
栋从数字测绘到智能测绘,这已成为必然选择。
[康1] 1智能化测绘的概念从技术角度来看,数字测绘不仅使用特殊工具或设备测量空间分布、专题属性、互连和自然因素、人工结构和人类现象的时间、空间变化,还为地理空间数据的数字产品生成提供数字建模、空间处理和视觉表达的实现以及相关的数据信息服务。
它的本质特征是使用定量算法或分析模型来计算和分析矢量或栅格空间中各种数字化的观测数据,以实现几何处理、物理反演和误差分析。
多年来,在计算几何、离散数学、数理统计等基础上,根据坐标系的测绘、投影变换、可视化机制、共线性方程和测量像差的原则,人们研究了时空数据、遥感图像、数字地图等几何特征和物理参数,并提出了多种算法。
探讨水库大坝外观形变自动监测技术

探讨水库大坝外观形变自动监测技术城市中一般都是以水库蓄水的形式为城市居民提供饮用水,水库蓄水能力的大小与城市发展息息相关,一般大型城市周围都配备几个大型水库,以满足人民生活基本需要。
当雨量丰沛时正是水库蓄水的最佳时机,同时也对水库的安全防御能力提出了新的要求,尤其是实时监测水库大坝外观形变,当外观形变达到警戒范围时,必须开闸放水以减轻对水坝的压力,从而保证安全。
水坝外观形变需要定期、定时进行监测,根据监测结果制定保养和维护措施,以提高水坝抗洪涝、地震、其他自然灾害的能力,对保护人民生命、财产等起到至关重要作用。
1外观形变监测技术精密工程测量和变形监测,是以毫米级乃至亚毫米级精度为目标的工程测量,水利大坝变形是正好适合此领域,通过对大坝上特定位置点位移随时间的变化情况,而得到外观形变。
早期的监测仪器可以完成水平位移检测、垂直位移监测、三维位移监测。
水平和垂直位移监测时采用的仪器主要有侧垂线坐标仪、引张线仪、遥测静力水准仪、激光准直测量仪、自动化全站仪等。
三维位移监测主要采用经纬仪、全站仪等行测量。
上述测量仪器各有优缺点,对水坝变形监测手段有限,费事费力,而且效率不高,尤其对于某些特殊位置点,由于环境特点不适合架设检测仪器,从而形成检测盲区而带来隐患。
上述监测仪器的另一个显著弊端是检测数据不能实时处理,必须对数据进行事后分析,有可能错失最佳保养、维护、处理时机。
GPS是一种新型的外观形变监测仪器,实践已经证明可以在各种精密工程测量和变形检测中应用,借助其精密位置测量技术实现水库大坝外观三维形变监测是其应用的一个主要领域,与其他监测仪器比较,GPS具有精度高、速度快、全天候、实时性好、测量数据全面、便于联网、不需要通视等诸多优点,是实现全自动化检测的必备条件之一。
应用GPS实现测量主要两种模式:一是使用GPS 进行定期、定点人工采集数据,这种模式虽然简单,但是实时性不好;二是在每一个监测点上都安置一个GPS接收系统,此种方式具有实时性,最高可1秒钟更新一次数据,但是这种模式成本较高,制约了监测点的个数,上述两种模式都有具体应用实例。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TCA测量机器人在大坝变形监测中的应用浅谈
发表时间:2018-09-20T09:44:26.990Z 来源:《防护工程》2018年第10期作者:李明[导读] 本文主要就以某地大坝变形监测系统为例,全面介绍TCA测量机器人自动观测系统方案,以及在其中的应用。
以期能够为其他相关工程的开展提供一定的参考意见,确保水利枢纽工程质量达到相关标准。
李明
中国水利水电第七工程局试验检测研究院四川省成都市 611730 摘要:随着我国社会经济的不断发展,相关部门开始注重对水利枢纽工程的建设。
为了能够更好的保证工程中水利设施运营的安全性,则需要施工单位注重对大坝安全监测这个项目。
基于此,本文主要就以某地大坝变形监测系统为例,全面介绍TCA测量机器人自动观测系统方案,以及在其中的应用。
以期能够为其他相关工程的开展提供一定的参考意见,确保水利枢纽工程质量达到相关标准。
关键词:TCA测量机器人;大坝变形监测;应用浅谈结合实际能够清楚的发现,当前相关单位在工程中的变形监测网的施测方法有很多,具体表现在:传统方法、测量机器人和GPS方法。
在传统方法上,主要就是通过测距仪和经纬仪来对其进性施测。
在此过程中,主要以人工观测为主。
对于GPS,其具有实时性和连续性等特点。
在变形监测网的应用,取得较好的试验发展成果。
但是因水利工程主要位于地形较为复杂的陡峭地段,因而存在卫星信号被遮挡的问题。
而测量机器人,属于智能型电子全战仪。
在实际应用中,其主要是通过相关的传感器,也就是CCD,来识别目标。
在此过程中,其还会在相关软件的控制下,进行自动搜索、跟踪、识别以及精确照准目标等信息,因而成为现阶段施工单位在测量工作中最常用技术。
对此,下文主要以某工程为例,对TCA测量机器人在大坝变形监测中的应用进行全面分析。
以此能够在一定程度上提高我国在这方面的能力。
一、工程概述
某地水利枢纽水利工程不仅作我国实施西部大开发十大标志性工程之一,同时也是当地规划初期基础设施建设的重点工程。
在实际中,该工程主要位于岷江上游下段,距离市中心大约60km,而岷江上游河段是处于峡谷地带,且水流湍急,自然落差比较大[1]。
另外,岷江上游河段的还处于暴雨频发区,在每年的6-9月,暴雨洪水的出现,都会给当地安全带来严重的威胁。
因该水利枢纽工程是当地重要的水源工程,因而属于大I型水利枢纽工程。
施工单位在建筑物设计上,要以最大的洪水标准进行。
二、徕卡测量机器人及其测量软件
对于瑞士徕卡公司所生产的TCA系列自动全站仪,也被称为测量机器人。
这种设备具有一定的智能化和自动化性能,因而能够让施工单位在工程施工中更好的进行大坝外部变形的3维位移观测。
在实际中,TCA自动全站仪能够确保电子整平、自动正倒镜观测以及自动记录观测数据,因而具有独特的ATR模式。
促使全站仪在大坝监测中的应用能够进行自动识别目标[2]。
在此过程中,当全站仪所发送的红外光经过棱角反射中,并经仪器内置中的CCD像机判断接受后,则会自动精确并确定棱镜具体的中心位置。
在这种方式下,就不需要相关人员以人工形式精确照准和调焦,进而在一定程度上提高工作效果。
另外,TCA自动全站仪需要配以专业软件,以此能够使得整个大坝变形在监测过程中在计算机有效控制下,自动操作。
现场数据采集时,还应对测站及测点的干湿温及气压同步观测,以便于在后期数据处理提高精度。
在大坝变形监测中使用TCA自动全站仪,能够确保测角精度为±0.5,测距精度则为±(1mm+1ppm+Dkm),单棱镜测程为1.2km。
所有观测仪器及辅助仪表、工具都按《计量法》的要求,在法定计量检验单位进行了检定,检定结果均在有效期内,在使用前也按规范和《技术要求》的要求进行了检验。
使用的仪器精度可靠,满足观测精度要求。
三、监测网观测
(一)限差设定
在通常情况下,TCA2003自动跟踪全站仪的观察和记录这个环节,都是由仪器自动完成的。
因而需要进行人工干预。
因该软件系统内有相关规范要求,因而符合相关规定中的观测手簿记录格式。
在这其中,如果出现超限值,则会自动报警,施测人员根据要求进行重测,直到符合限差要求。
(二)监测网基本图形因平面位移基准网主要是由8个基准点所构成的,也就是101-108,而起算方向则为105-103。
并计34个观测方向和21条观测边,具体如下图所示。
图一平面位移基准网网形示意图(三)平面基准网边长观测在这其中,需要相关人员在不同时段往返四测,并在每测回照准一次则要读数四次。
对于各个时段的观测时间和不同时段间隔时间的掌握,主要是以不影响观测精度作为原则[3]。
另外,在对气象元素的测定上,相关人员则需要结合实际,利用测站和棱镜站,来测定气压、干温和温湿。
(四)平面基准网水平角观测
结合相关标准,在进行平面基准网水平观测上,相关人员必须要按照相关标准和要求,使用全圆方向法。
在此期间,要求其至少观测12个测回。
在实际中,观测主要在测站地面气温与大气温度的差异比较小情况下进行,因而使得总的观测气象比较好[4]。
有利于相关工作人员在相同的时间段内连续观测。
如果遇到个别观测站气象条件较差的情况,相关工作人员则可使用分时段方式进行观测。
四、水平位移基准网起算点的稳定性分析和监测点的位移分析
相关工作人在进行稳定性分析和位移分析工作时,需要注重以下两个方面。
一是,结合实际情况,选择合适的方法来排除或减少测量误差干扰[5]。
在此工作中,还需要相关人员根据所观察的数据,选择相应的平差方式进行处理。
之后,还要按照相关要求,计算两个不同时期网点位置的差异量;二是,注重对这些差异量是否属于误差干扰和坐标位移的相关信息进行深入分析。
(一)对水平位移基准起算点的稳定性分析
对于如何分析水平位移基准起算点的稳定性,相关人员可通过对复测的坐标计算,即105-103的边长与原坐标边长进行比较,以此能够将其所计算出的方位角进行比较。
(二)对水平位移监测点的稳定性进行分析
所谓的水位平移监测点,就是通过进行固定基准来进行较为自由的网经典平差,其次,需要相关人员通过对数据统计的合理利用,来假设所检验的理论。
具体来说就是在原先给定的水平ɑ下,对临监网块进行整体稳定的检验。
在此过程中,如果整体检验没有通过相关标准,这时就需要相关人员进行单点t检验。
之所以这样做,主要是为了能够在最大程度上衡量各个点位移量的显著性。
在实际中,因只有一个主网,使得不能够对其进行F检验。
针对这种情况,相关人员则就可按照相关要求,使用变形误差椭圆方法来对整个网观测资料进行位移分析。
关于变形椭圆法,则就是在各个点中作取K倍中误差作为极限误差椭圆。
在这之后,还要结合实际点位移向量落在椭圆内外的实际情况[6]。
只有这样才能够更好的判断出该位移是否显著。
结语:
综合上述,在大坝变形监测中应用测量机器人,能够清楚的发现,在此次水利枢纽工程中的,变形监测方案在设计上是合理的。
在这其中,工作基点较为稳,且在监测点上也在一定程度上体现出整个边坡的具体变形情况。
因TCA2003测量机器人在监测网自动测量系统上,具有较为精确的精度,工作效率也比高,是传统方法不具有的优势。
因而在实应用中极大的满足复杂地形条件下的大坝变形观测需求。
结合当前我信息技术水平的不断提升,使得相关施工单位在大坝变形监测系统完善上更加全面,进而保障水利工程质量。
参考文献:
[1]赵飞燕.大坝坝体变形监测的技术方法与应用[J].杨凌职业技术学院学报,2018,17(01):32-34.
[2]徐雪.GPS技术在水库大坝变形监测中的应用[J].科技创新与应用,2018(04):131-132.
[3]胡明罡,郭久波,左丰收,黄鑫.物联网技术在密云水库大坝变形监测系统中的应用[J].北京水务,2017(05):55-59.
[4]布艾杰尔·库尔班,阿布都艾尼·阿布都克热木,阿卜杜塔伊尔·亚森,艾力夏提·玉山,刘代芹,李桂荣,王晓强,苏力坦·玉散.利用GPS技术监测大坝表面变形[J].地震地磁观测与研究,2017,38(04):165-171.
[5]黄佳宾.GPS在天荒坪大坝变形监测中的应用[J].住宅与房地产,2017(17):246.
[6]王维洋. 无人机摄影测量快速建模技术及其工程应用[D].华北水利水电大学,2017.。