应用软件6 求解二次规划问题
matlab计算两个极值点的方法
matlab计算两个极值点的方法摘要:一、引言二、Matlab计算极值点的原理1.导数法2.二次规划法3.梯度下降法三、具体操作步骤1.导入数据2.计算导数3.寻找极值点四、实例演示1.简单的二维函数2.复杂的三维函数五、总结与展望正文:一、引言在工程实践中,经常会遇到需要求解极值点的问题。
Matlab作为一款强大的数学计算软件,为我们提供了多种求解极值点的方法。
本文将详细介绍如何在Matlab中计算两个极值点,以及具体的操作步骤。
二、Matlab计算极值点的原理1.导数法求解极值点的一种常用方法是利用函数的导数。
Matlab中提供了求导函数`fprintf`,可以方便地对函数进行求导。
找到函数的零点,即为极值点。
2.二次规划法二次规划法是一种求解无约束优化问题的方法。
通过构建一个目标函数和相应的约束条件,利用Matlab中的优化工具箱求解。
找到目标函数的极值点。
3.梯度下降法梯度下降法是一种迭代算法,通过不断更新变量值,使目标函数值逐步逼近极值。
Matlab中的梯度下降函数`fminbnd`可以用于求解极值点。
三、具体操作步骤1.导入数据首先,我们需要导入所需的函数和数据。
例如,我们可以使用`load`函数导入一个已经保存的矩阵或使用`x=1:10`创建一个区间数据。
2.计算导数对于简单的函数,我们可以直接使用`fprintf`函数求导。
例如,假设我们有函数`f(x)=x^3-6x^2+9`,可以计算其导数`df(x)=3x^2-12x`。
3.寻找极值点利用Matlab中的`zeros`函数找到导数为零的点,这些点即为极值点。
例如,求解方程`3x^2-12x=0`,得到极值点x=0和x=4。
4.对于复杂函数或三维函数,可以使用`fminbnd`函数求解极值点。
首先,定义目标函数和约束条件。
然后,调用`fminbnd`函数,得到极值点。
四、实例演示1.简单的二维函数假设我们有函数`f(x,y)=x^2+y^2-6x-8y+10`,在Matlab中可以按照以下步骤求解极值点:(1)计算导数:`df(x,y)=2x-6+2y-8`(2)寻找极值点:`zeros(2*10)`(3)求解极值点:使用`fminbnd`函数,设置初始猜测值`x0=y0=1`,得到极值点约为(2.24,3.24)。
二次规划问题
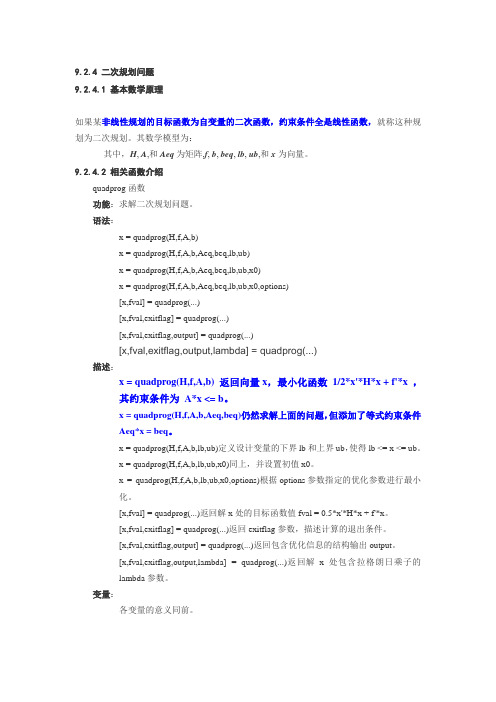
9.2.4 二次规划问题9.2.4.1 基本数学原理如果某非线性规划的目标函数为自变量的二次函数,约束条件全是线性函数,就称这种规划为二次规划。
其数学模型为:其中,H, A,和Aeq为矩阵,f, b, beq, lb, ub,和x为向量。
9.2.4.2 相关函数介绍quadprog函数功能:求解二次规划问题。
语法:x = quadprog(H,f,A,b)x = quadprog(H,f,A,b,Aeq,beq,lb,ub)x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0)x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)[x,fval] = quadprog(...)[x,fval,exitflag] = quadprog(...)[x,fval,exitflag,output] = quadprog(...)[x,fval,exitflag,output,lambda] = quadprog(...)描述:x = quadprog(H,f,A,b) 返回向量x,最小化函数1/2*x'*H*x + f'*x ,其约束条件为A*x <= b。
x = quadprog(H,f,A,b,Aeq,beq)仍然求解上面的问题,但添加了等式约束条件Aeq*x = beq。
x = quadprog(H,f,A,b,lb,ub)定义设计变量的下界lb和上界ub,使得lb <= x <= ub。
x = quadprog(H,f,A,b,lb,ub,x0)同上,并设置初值x0。
x = quadprog(H,f,A,b,lb,ub,x0,options)根据options参数指定的优化参数进行最小化。
[x,fval] = quadprog(...)返回解x处的目标函数值fval = 0.5*x'*H*x + f'*x。
matlab学习笔记之求解线性规划问题和二次型问题
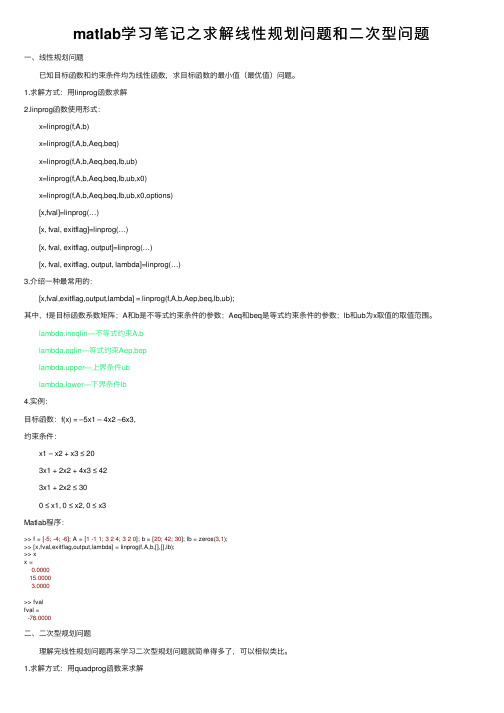
matlab学习笔记之求解线性规划问题和⼆次型问题⼀、线性规划问题 已知⽬标函数和约束条件均为线性函数,求⽬标函数的最⼩值(最优值)问题。
1.求解⽅式:⽤linprog函数求解2.linprog函数使⽤形式: x=linprog(f,A,b) x=linprog(f,A,b,Aeq,beq) x=linprog(f,A,b,Aeq,beq,lb,ub) x=linprog(f,A,b,Aeq,beq,lb,ub,x0) x=linprog(f,A,b,Aeq,beq,lb,ub,x0,options) [x,fval]=linprog(…) [x, fval, exitflag]=linprog(…) [x, fval, exitflag, output]=linprog(…) [x, fval, exitflag, output, lambda]=linprog(…)3.介绍⼀种最常⽤的: [x,fval,exitflag,output,lambda] = linprog(f,A,b,Aep,beq,lb,ub);其中,f是⽬标函数系数矩阵;A和b是不等式约束条件的参数;Aeq和beq是等式约束条件的参数;lb和ub为x取值的取值范围。
lambda.ineqlin—不等式约束A,b lambda.eqlin—等式约束Aep,bep lambda.upper—上界条件ub lambda.lower—下界条件lb4.实例:⽬标函数:f(x) = –5x1 – 4x2 –6x3,约束条件: x1 – x2 + x3 ≤ 20 3x1 + 2x2 + 4x3 ≤ 42 3x1 + 2x2 ≤ 30 0 ≤ x1, 0 ≤ x2, 0 ≤ x3Matlab程序:>> f = [-5; -4; -6]; A = [1 -11; 324; 320]; b = [20; 42; 30]; lb = zeros(3,1);>> [x,fval,exitflag,output,lambda] = linprog(f,A,b,[],[],lb);>> xx =0.000015.00003.0000>> fvalfval =-78.0000⼆、⼆次型规划问题 理解完线性规划问题再来学习⼆次型规划问题就简单得多了,可以相似类⽐。
优化问题的Matlab求解方法

优化问题的Matlab求解方法引言优化问题在实际生活中有着广泛应用,可以用来解决很多实际问题。
Matlab作为一款强大的数学计算软件,提供了多种求解优化问题的方法。
本文将介绍在Matlab中求解优化问题的常见方法,并比较它们的优缺点。
一、无约束无约束优化问题是指没有约束条件的优化问题,即只需要考虑目标函数的最大或最小值。
在Matlab中,可以使用fminunc函数来求解无约束优化问题。
该函数使用的是拟牛顿法(quasi-Newton method),可以迭代地逼近最优解。
拟牛顿法是一种迭代方法,通过逐步近似目标函数的梯度和Hessian矩阵来求解最优解。
在使用fminunc函数时,需要提供目标函数和初始点,并可以设置其他参数,如迭代次数、容差等。
通过不断迭代,拟牛顿法可以逐步逼近最优解。
二、有约束有约束优化问题是指在优化问题中加入了约束条件。
对于有约束优化问题,Matlab提供了多种求解方法,包括线性规划、二次规划、非线性规划等。
1. 线性规划线性规划是指目标函数和约束条件都为线性的优化问题。
在Matlab中,可以使用linprog函数来求解线性规划问题。
该函数使用的是单纯形法(simplex method),通过不断迭代来逼近最优解。
linprog函数需要提供目标函数的系数矩阵、不等式约束矩阵和约束条件的右手边向量。
通过调整这些参数,可以得到线性规划问题的最优解。
2. 二次规划二次规划是指目标函数为二次型,约束条件线性的优化问题。
在Matlab中,可以使用quadprog函数来求解二次规划问题。
该函数使用的是求解二次规划问题的内点法(interior-point method),通过迭代来求解最优解。
quadprog函数需要提供目标函数的二次项系数矩阵、线性项系数矩阵、不等式约束矩阵和约束条件的右手边向量。
通过调整这些参数,可以得到二次规划问题的最优解。
3. 非线性规划非线性规划是指目标函数或者约束条件中至少有一个是非线性的优化问题。
用Lingo软件编程求解规划问题

x2桶牛奶生产A2 获利 16×4 x2
Max z 72 x1 64 x2
x1 x2 50
12 x1 8x2 480 3x1 100
x1, x2 0
线性规 划模型 (LP)
例1——加工奶制品的生产计划
x1 x2 50
12
x1 8x2 480 3x1 100
Lingo软件——基本集合元素的列举
一个原始集是由一些最基本的对象组成的。 setname [/member_list/] [: attribute_list];
sets: students/John Jill, Rose Mike/: sex, age;
endsets
集、集成员和集属性
• 集成员无论用何种字符标记,它的索引都是 从1开始连续计数。
ij
8
j 1
N Nij
V
i
i 1, ,6,j 1, ,8, i 1, ,6,
N 6
i1 ij
d
j
j 1, ,8.
结果
Lingo软件
Lingo 是一个可以简洁地阐述、解决和分析复杂问题的简便工具。
其特点是程序执行速度很快,易于输入、修改、求解和分析一个数 学规划问题。
N 6
i1 ij
d
j
j 1, ,8.
corps
需求量 35 37 22 32 41 32 43 38
拥有量
60 55 51 depot 43 41 52
B1 B2 B3 B4 B5 B6 B7 B8
A1
62674259
A2
49538582
matlab解方程的函数

MATLAB解方程的函数1. 简介MATLAB是一种强大的数值计算和科学研究软件,提供了许多内置函数以解方程。
在这篇文章中,我们将详细讨论MATLAB中用于解方程的函数,以及如何使用它们来求解各种数学问题。
2. MATLAB解方程的函数列表以下是MATLAB中常用的解方程函数:1.solve:用于求解代数方程组的函数。
2.fsolve:用于求解非线性方程组的函数。
3.fminsearch:用于寻找函数的最小值的函数。
4.fminunc:用于寻找多元函数的最小值的函数。
5.linprog:用于求解线性规划问题的函数。
6.quadprog:用于求解二次规划问题的函数。
现在,让我们逐个介绍这些函数及其用法。
2.1 solve函数solve函数是MATLAB中用于求解代数方程组的函数。
它通常用于求解符号方程,但也可以用于数值方程。
以下是solve函数的基本用法:syms x y zeq1 = x + y + z == 10;eq2 = x - y - z == 2;eq3 = x^2 + y^2 + z^2 == 16;[solx, soly, solz] = solve(eq1, eq2, eq3, x, y, z);上述代码中,我们定义了三个方程eq1,eq2和eq3,然后使用solve函数求解这个方程组。
solve函数返回了方程组的解solx,soly和solz,它们分别表示方程组中变量x,y和z的解。
fsolve函数是MATLAB中用于求解非线性方程组的函数。
它使用数值方法来找到方程组的近似解。
以下是fsolve函数的基本用法:fun = @(x) [x(1)^2 + x(2)^2 - 25; x(1) - x(2)^3];x0 = [0; 0];[x, fval] = fsolve(fun, x0);上述代码中,我们定义了一个匿名函数fun,该函数表示一个非线性方程组。
然后,我们使用fsolve函数求解这个方程组。
二次规划资料
向。
内点法的改进
• 修正内点法:引入正则化项,提高内点法的稳定性和收敛性。
• 梯度投影法:利用梯度的投影性质,简化内点法的计算。
• 并行内点法:利用多核处理器并行计算,提高计算速度。
修正牛顿法
修正牛顿法原理
• 基本思想:引入正则化项,使得海森矩阵具有更好的条件数。
• 更新公式:^(k+1) = ^k - ^(-1)^k - ^(-1),其中为步长因子。
• 敏感性分析图:绘制模型结构与最优解的关系图,直观
的可行域,从而影响最优解的值和位置。
展示模型结构变化对最优解的影响。
06
二次规划问题的拓展与推广
多目标二次规划问题
多目标二次规划问题
• 定义:多目标二次规划问题是一类求解多个目标函数的二次规划问题,目标函数
之间可能存在冲突或权衡。
• 决策变量:多目标二次规划问题需要求解一组决策变量的最优值。
非线性二次规划问题
• 定义:非线性二次规划问题是一类目标函数或约束条件为非线性函数的二次规划
问题。
• 决策变量:非线性二次规划问题需要求解一组决策变量的最优值。
• 目标函数:非线性二次规划问题的目标函数是一个非线性二次多项式函数,通常
表示为最小化形式。
非线性二次规划问题的求解方法
• 转化为线性问题:通过变量替换或线性化方法,将非线性二次规划问题转化为线性
参数变化对最优解的影响
敏感性分析的方法
• 目标函数系数变化:目标函数系数的变化会影响最优解
• 参数扫描:遍历参数取值范围,观察最优解的变化情况。
的值和位置。
• 敏感性分析图:绘制参数与最优解的关系图,直观展示
• 约束条件变化:约束条件的变化会影响最优解的可行域,
二次规划问题的一个解法及几点注记
二次规划问题的一个解法及几点注记二次规划问题是指在线性规划模型中,目标函数和约束条件均为二次函数的问题。
常见的解法有坐标下降法和半正定性法。
下面是关于二次规划问题的一个解法(坐标下降法)及几点注记。
解法:坐标下降法是一种求解二次规划问题的迭代算法。
基本思路是不断地求解当前点的搜索方向,然后在这个方向上移动,直到找到最优解为止。
具体步骤如下:1.设定初始点 x0,并求出当前点的目标函数值 f(x0)。
2.求解当前点 x0 的搜索方向 d0。
3.设定步长 t,求出下一个点 x1 = x0 + t * d0。
4.求出下一个点 x1 的目标函数值 f(x1),并与当前点 x0的目标函数值 f(x0) 进行比较。
5.若 f(x1) < f(x0),则接下来以 x1 为当前点,重复步骤 2-5;若 f(x1) ≥ f(x0),则退出迭代。
注记:1.坐标下降法的关键在于如何求解当前点的搜索方向d0。
一般来说,当前点的搜索方向 d0应该是当前点的二次梯二次规划问题的一个解法及几点注记:继续上文:注记:1.坐标下降法的关键在于如何求解当前点的搜索方向d0。
一般来说,当前点的搜索方向 d0应该是当前点的二次梯度的负方向,即 d0 = -∇2f(x0)。
2.坐标下降法的收敛速度取决于步长 t的取值。
常用的方法有常数步长法和自适应步长法。
常数步长法是指固定步长t,而自适应步长法是指根据当前点的目标函数值变化情况来调整步长 t。
3.坐标下降法的收敛性是指随着迭代次数的增加,目标函数的值会逐渐降低。
但是,坐标下降法并不能保证收敛到全局最优解,只能保证收敛到局部最优解。
4.坐标下降法的迭代次数一般较多,但是每次迭代的计算量较小,因此坐标下降法适用于线性规划问题规模较大的情况。
希望这些内容能为你的学习提供帮助!。
二次规划问题

二次规划问题二次规划(Quadratic Programming,QP)是指在一定约束条件下,优化一个二次目标函数的数学问题。
它是数学规划(Mathematical Programming)中的一种重要分支,广泛应用于工程、经济、金融等领域。
二次规划问题的一般形式如下:minimize f(x) = (1/2)*x^T*Q*x + c^T*xsubject to: Ax ≤ bAx = blx ≤ x ≤ ux其中,x 是一个 n 维向量,Q 是一个 n×n 矩阵,c 是一个 n 维向量,A 是一个 m×n 矩阵,b 是一个 m 维向量,lx 和 ux 分别是 x 的下界和上界。
二次规划问题具有以下特点:1. 目标函数是一个二次函数,有一个二次项、一个一次项和一个常数项。
2. 约束条件是线性的,可以是等式约束或者不等式约束。
3. 决策变量是一个向量,需要满足一定的边界条件。
解决二次规划问题有多种方法,常用的有凸优化、KKT 条件和梯度法等。
在工程领域,二次规划问题经常出现在优化设计、控制系统和信号处理等方面。
例如,在机械设计中,可以使用二次规划问题来优化零件的尺寸和形状,以实现最小体积和质量。
在控制系统中,可以使用二次规划问题来设计最优控制器的参数,以实现系统的最佳响应和稳定性。
在信号处理中,可以使用二次规划问题来估计信号的频率、幅度和相位,以实现最佳的信号采样和重构。
总之,二次规划问题是一种重要的数学工具,能够解决许多实际问题。
通过优化目标函数,可以得到满足约束条件的最优解,提高系统的性能和效益。
随着计算机技术的发展和数学优化算法的改进,二次规划问题的求解越来越高效和可靠,为工程、经济和金融领域的决策提供了有力支持。
LINDO简介
在输入的最后一行中“qcp 4” ,表示原问题中的实际约束是从输入的第四行开始的,注 意这里“s.t.”并不能算作是一行,而“c3)”行才是真正的第四行。 对该问题求解,得到的报告窗口为:
可以看出,迭代了 7 步,得到最优解(0.666667,0.333333) ,最优值 1.355556。求解二 次规划时的灵敏度分析也同整数规划类似,是没有意义的,我们无法利用。 注意在求解二次规划时,最好是将最大化问题都改写为最小化问题来求解。
目前整数规划尚无相应完善的灵敏度分析,因此检验数和影子价格无实际意义。
五、求解二次规划
利用 LINDO 求解二次规划时需要对问题进行改写才能够进行,我们通过事例来进行说 明。 例 3.求解下述二次规划问题:
2 2 + x2 − x1 x 2 + 0.4 x2 min z = 3 x1
1.2 x1 + 0.9 x 2 > 1.1 x + x = 1 1 2 s.t . x 2 < 0.7 x1 , x2 ≥ 0
题目中有三个约束条件是我们需要考虑的,而第四个约束(非负约束)在 LINDO 中可 以不去考虑,因此我们设出与有效约束数目相同的变量 L1、L2、L3,它们分别对应三个约 束,然后写出下述函数:
2 2 3 x1 + x2 − x1 x 2 + 0.4 x 2 − L1(1.2 x1 + 0.9 x 2 − 1.1)
+ L2( x1 + x 2 − 1) + L 3( x 2 − 0.7 )
由该函数可以看出,它的第一部分就是目标函数,而 L1 与第一个约束相乘,L2 与第二 个约束相乘,L3 与第三个约束相乘。由于第一个约束是“>” ,因此在 L1 前面用的是减号。 将该函数分别对两个决策变量求偏导,并令其大于零,得到两个线性约束:
使用python求解二次规划的问题
使⽤python求解⼆次规划的问题Python中⽀持Convex Optimization(凸规划)的模块为CVXOPT,其安装⽅式为:pip install cvxopt⼀、数学基础⼆次型⼆次型(quadratic form):n个变量的⼆次多项式称为⼆次型,即在⼀个多项式中,未知数的个数为任意多个,但每⼀项的次数都为2的多项式。
其基本形式如下亦可写作,,称作⼆次型的矩阵表⽰,其中A是对称矩阵。
仿照如下的定义,我们可以直接在其基本形式和矩阵表⽰之间相互转化。
2.正定矩阵设A是n阶实对称矩阵,如果对任意⼀⾮零实向量X,都使⼆次型成⽴,则称f(X)为正定⼆次型,矩阵A称为正定矩阵(Positive Definite),A为正定矩阵。
相应的,如果对任意⼀⾮零实向量X,都使⼆次型成⽴,则称f(X)为半正定⼆次型,A为半正定矩阵。
3.⼆次规划问题⼆次规划是指,带有⼆次型⽬标函数和约束条件的最优化问题。
其标准形式如下:即在Gx<h 和Ax=b的约束下,最⼩化⽬标函数。
其中,当P是正定矩阵时,⽬标函数存在全局唯⼀最优解;P是半正定矩阵时,⽬标函数是凸函数,存在全局最优解(不唯⼀);P是不定矩阵时,⽬标函数⾮凸,存在多个局部最⼩值和稳定点,为np 难问题。
(本篇博客中我们不考虑⾮正定情况)。
⼆、python程序求解⼯具包:Cvxopt python 凸优化包函数原型:Cvxopt.solvers.qp(P,q,G,h,A,b)P,q,G,h,A,b的含义参见上⾯的⼆次规划问题标准形式。
编程求解思路:1.对于⼀个给定的⼆次规划问题,先转换为标准形式(参见数学基础中所讲的⼆次型⼆中形式转换)2.对照标准形势,构建出矩阵P,q,G,h,A,b3.调⽤result=Cvxopt.solvers.qp(P,q,G,h,A,b)求解4.print(result)查看结果,其中result是⼀个字典,我们可直接获得其某个属性,e.g. print(result['x'])下⾯我们来看⼀个例⼦import pprintfrom cvxopt import matrix, solversP = matrix([[4.0,1.0],[1.0,2.0]])q = matrix([1.0,1.0])G = matrix([[-1.0,0.0],[0.0,-1.0]])h = matrix([0.0,0.0])A = matrix([1.0,1.0],(1,2))#原型为cvxopt.matrix(array,dims),等价于A = matrix([[1.0],[1.0]])b = matrix([1.0])result = solvers.qp(P,q,G,h,A,b)print('x\n',result['x'])运⾏结果:注意事项:cvxopt.matrix与numpy.matrix的排列顺序不同,其中cvxopt.matrix是列优先,numpy.matrix是⾏优先。
二次规划问题
错误!未定义书签。
错误!未定义书签。
序列二次规划法求解一般线性优化问题:12min (x)h (x)0,i E {1,...,m }s.t.(x)0,i {1,...,m }i i f g I =∈=⎧⎨≥∈=⎩ (错误!未定义书签。
错误!未定义书签。
)基本思想:在每次迭代中通过求解一个二次规划子问题来确定一个下降方向,通过减少价值函数来获取当前迭代点的移动步长,重复这些步骤直到得到原问题的解。
1。
1等式约束优化问题的Lagrange-Newton 法考虑等式约束优化问题min (x)s.t.h (x)0,E {1,...,m}j f j =∈=\* MERGEFORMAT 错误!未定义书签。
(错误!未定义书签。
.错误!未定义书签。
) 其中:,n f R R →:()n i h R R i E →∈都为二阶连续可微的实函数. 记1()((),...,())T m h x h x h x =。
则错误!未定义书签。
(错误!未定义书签。
.错误!未定义书签。
)的Lagrange 函数为: 1(,)()*()()*()mT i i i L x u f x u h x f x u h x ==-=-∑(1。
3)其中12(,,...,)T m u u u u =为拉格朗日乘子向量。
约束函数()h x 的Jacobi 矩阵为:1()()((),...,())T T m A x h x h x h x =∇=∇∇。
对(1.3)求导数,可以得到下列方程组:(,)()A()*(,)0(,)()T x u L x u f x x u L x u L x u h x ∇⎡⎤⎡⎤∇-∇===⎢⎥⎢⎥∇-⎣⎦⎣⎦(1.4)现在考虑用牛顿法求解非线性方程(1。
4).(,)L x u ∇的Jacobi 矩阵为:(,)()(,)()0T W x u A x N x u A x ⎛⎫-= ⎪-⎝⎭(1。
5)其中221(,)L(,)()*()mxx iii W x u x u f x u h x ==∇=∇-∇∑是拉格朗日函数L(,)x u 关于x 的Hessen 矩阵。
用LINGO解决非线性规划问题
注意比较:
当去掉第二个约束条件y<=0.5时,最小值 为-3 当x=0, y=1时;
当去掉所有约束条件无条件最值时,最小
值为-5 当x=1, y=2时;
15
三、用LINGO解决非线性规划问题
例3 求解非线性规划问题:
16
三、用LINGO解决非线性规划问题
17
三、用LINGO解决非线性规划问题
18
X1+ 3X2<=18;
X1,X2为决策变量;
2X1+ X2<=16;
4X2<=20; 第二到四行均为约束条件
8
二、用LINGO解决基本的线性规划问题
我们编辑程序并求解后,得到LINGO Model窗口、 Solution report窗口和Solver status窗口如下:
9
二、用LINGO解决基本的线性规划问题
6
二、用LINGO解决基本的线性规划问题
例1 求解如下的线性规划模型:
m ax z 50 x1 70 x2 ,
x1 3 x2 1 8,
2 x 1 x 2 1 6 ,
4x2 20,
x 1 , x 2 0
7
二、用LINGO解决基本的线性规划问题
我们编辑一个LINGO程序:
MAX=50X1+70X2; 目标函数;
三、用LINGO解决非线性规划问题
例4 求解二次规划问题:
直接使用LINGO最大化过程:
max=98x1+277x2-x1^2-0.3x1x2-2x2^2; x1 + x2 <= 100; x1 <= 2x2; ginx1;ginx2;
19
三、用LINGO解决非线性规划问题
(完整word版)求解二次规划问题的拉格朗日及有效集方法
求解二次规划问题的拉格朗日及有效集方法——最优化方法课程实验报告学院:数学与统计学院班级:硕2041班姓名:王彭学号:3112054028指导教师:阮小娥同组人:钱东东求解二次规划问题的拉格朗日及有效集方法求解二次规划问题的拉格朗日及有效集方法摘要二次规划师非线性优化中的一种特殊情形,它的目标函数是二次实函数,约束函数都是线性函数。
由于二次规划比较简单,便于求解(仅次于线性规划),并且一些非线性优化问题可以转化为求解一些列的二次规划问题,因此二次规划的求解方法较早引起人们的重视,称为求解非线性优化的一个重要途径。
二次规划的算法较多,本文仅介绍求解等式约束凸二尺规划的拉格朗日方法以及求解一般约束凸二次规划的有效集方法。
关键字:二次规划,拉格朗日方法,有效集方法。
- 1 -《最优化方法》课程实验报告- 2 - 【目录】摘要........................................................................................................................... - 1 -1 等式约束凸二次规划的解法............................................................................... - 3 -1.1 问题描述.................................................................................................... - 3 -1.2 拉格朗日方法求解等式约束二次规划问题............................................ - 3 -1.2.1 拉格朗日方法的推导...................................................................... - 3 -1.2.2 拉格朗日方法的应用...................................................................... - 4 -2 一般凸二次规划问题的解法............................................................................... - 5 -2.1 问题描述.................................................................................................... - 5 -2.2 有效集法求解一般凸二次规划问题........................................................ - 6 -2.2.1 有效集方法的理论推导.................................................................. - 6 -2.2.2 有效集方法的算法步骤.................................................................. - 9 -2.2.3 有效集方法的应用........................................................................ - 10 -3 总结与体会......................................................................................................... - 11 -4 附录..................................................................................................................... - 11 -4.1 拉格朗日方法的matlab程序................................................................. - 11 -4.2 有效集方法的Matlab程序 .................................................................... - 11 -求解二次规划问题的拉格朗日及有效集方法- 3 -1 等式约束凸二次规划的解法1.1 问题描述我们考虑如下的二次规划问题⎪⎩⎪⎨⎧=+b Ax t s x c Hx x T T ..,21min (1.1) 其中n n R H ⨯∈对称正定,n m R A ⨯∈行满秩,n R x c,∈,m R b ∈。
求解二次规划问题

实验2求解二次规划问题LINDO 可以求解二次规划(QP )问题。
例如:⎪⎩⎪⎨⎧<=+>++-+=7.011.19.02.1..4.03min 22y y x y x t s yxy y x f由LAGRANGE 乘子法,得()()()7.011.19.02.14.0322-+-++-+-+-+y C y x B y x A y xy y x ,分别对x 、y 求偏导,得到两个约束条件:4.09.0202.16->++-->+--C B A x y B A y x在LINDO 中输入下列命令:MIN X+Y+A+B+CST 6X-Y -1.2A+B>0 2Y -X-0.9A+B+C>-0.41.2X+0.9Y>1.1 X+Y=1 Y<0.7 END QCP 4注释:MIN X+Y+A+B+C 一句只代表变量的出场顺序;QCP 4 一句代表前4行不是原问题真正的约束,原问题真正的约束从第5行开始。
LINDO 运行后输出以下结果:STATUS OPTIMALQP OPTIMUM FOUND AT STEP 7OBJECTIVE FUNCTION V ALUE1) 1.355556V ARIABLE VALUE REDUCED COST X 0.666667 0.000000Y0.333333 0.000000A 10.888889 0.000000B 9.400000 0.000000C 0.000000 0.366667ROW SLACK OR SURPLUS DUAL PRICES2) 0.000000 -0.6666673) 0.000000 -0.3333334) 0.000000 -10.8888895) 0.000000 9.4000006) 0.366667 0.000000NO. ITERATIONS= 7这个结果说明:LINDO求解此二次规划问题(QP)共用7步迭代得到最优解fmin = 1.355556,X = 0.666667,Y = 0.333333。
二次规划与非线性规划

8
3. 建立主程序. 求解非线性规划的函数是fmincon, 命令的基本格式如下: (1) x=fmincon(‘fun’,X0,A,b) (2) x=fmincon(‘fun’,X0,A,b,Aeq,beq) (3) x=fmincon(‘fun’,X0,A,b, Aeq,beq,VLB,VUB) (4) x=fmincon(‘fun’,X0,A,b,Aeq,beq,VLB,VUB,’nonlcon’) (5)x=fmincon(‘fun’,X0,A,b,Aeq,beq,VLB,VUB,’nonlcon’,options)
3、运算结果为: x =0.6667 1.3333
z = -8.2222
5
6
Matlab求解非线性规划问题
标准型为: min F(X) s.t. AX b
Aeq X beq G(X) 0
Ceq(X)=0 VLB X VUB
其中X为n维变元向量,G(X)与Ceq(X)均为非线性函数组成 的向量。
MATLAB求解 二次规划与非线性规划
1
二次规划
标准型为: Min Z= 1 XTHX+cTX
Aeq X beq s.t. AX<=b VLB≤X≤VUB
2
2
用MATLAB软件求解,其输入格式如下: 1. x=quadprog(H,C,A,b); 2. x=quadprog(H,C,A,b,Aeq,beq); 3. x=quadprog(H,C,A,b,Aeq,beq,VLB,VUB); 4. x=quadprog(H,C,A,b, Aeq,beq ,VLB,VUB,X0); 5.x=quadprog(H,C,A,b,Aeq,beq ,VLB,VUB,X0,options); 6. [x,fval]=quaprog(...); 7. [x,fval,exitflag]=quaprog(...); 8. [x,fval,exitflag,output]=quaprog(...);
LINDO软件求线性规划、整数规划和0-1规划

LINDO软件简介/求解线性规划问题LINDO是一种专门用于求解数学规划问题的软件包。
由于LINDO执行速度很快、易于方便输入、求解和分析数学规划问题。
因此在数学、科研和工业界得到广泛应用。
LINDO/GO主要用于解线性规划、非线性规划、二次规划和整数规划等问题。
也可以用于一些非线性和线性方程组的求解以及代数方程求根等。
LINDO/GO中包含了一种建模语言和许多常用的数学函数(包括大量概论函数),可供使用者建立规划问题时调用。
一般用LINDO(Linear Interactive and Discrete Optimizer)解决线性规划(LP—Linear Programming)。
整数规划(IP—Integer Programming)问题。
其中LINDO 6 .1 学生版至多可求解多达300个变量和150个约束的规划问题。
其正式版(标准版)则可求解的变量和约束在1量级以上。
LINGO则用于求解非线性规划(NLP—NON—LINEAR PROGRAMMING)和二次规则(QP—QUARATIC PROGRAMING)其中LINGO 6.0学生版最多可版最多达300个变量和150个约束的规则问题,其标准版的求解能力亦在10^4量级以上。
虽然LINDO和LINGO 不能直接求解目标规划问题,但用序贯式算法可分解成一个个LINDO和LINGO能解决的规划问题。
要学好用这两个软件最好的办法就是学习他们自带的HELP文件。
下面拟举数例以说明这两个软件的最基本用法。
(例子均选自张莹《运筹学基础》)例1.(选自《运筹学基础》P54.汽油混合问题,线性规划问题)一种汽油的特性可用两个指标描述:其点火性用“辛烷数”描述,其挥发性用“蒸汽压力”描述。
某炼油厂有四种标准汽油,设其标号分别为1,2,3,4,其特性及库存量列于下表1中,将上述标准汽油适量混合,可得两种飞机汽油,某标号为1,2,这两种飞机汽油的性能指标及产量需求列于表2中。
lqr 的qp解法 -回复

lqr 的qp解法-回复LQR的QP解法(线性二次规划)是一种经典的优化算法,用于解决连续时间、线性系统的最优控制问题。
在这篇文章中,我将一步一步解释LQR 的QP解法,涵盖其基本原理、数学推导以及实现方法。
1. 线性二次规划问题首先,我们需要了解线性二次规划问题。
在最优控制中,我们希望找到一个控制器,以使系统的性能指标最小化。
这可以被转化为一个线性二次规划问题,即将目标函数和约束条件转化为一组线性等式或不等式。
线性二次规划问题的一般形式可以表示为:minimize ½x'Qx + c'xsubject to Gx ≤hAX = b其中,x是控制向量(或称解向量),Q是对控制向量加权的正定矩阵,c 是一个常数向量,G和A是约束矩阵,h和b是约束向量。
2. LQR问题LQR(线性二次型调节)问题是最优控制中的一种经典问题。
其目标是通过选择合适的控制器来使系统响应最小化。
LQR问题可以用一个标准的线性二次规划来表示,其中状态向量和控制向量分别是目标函数的变量。
3. LQR问题的数学模型假设我们有一个线性时不变系统,其状态空间模型可以表示为:x' = Ax + Buy = Cx + Du其中,x是状态向量,u是控制向量,y是输出向量,A、B、C和D是系统的状态方程参数。
4. LQR目标函数的确定LQR问题的目标是最小化系统的性能指标,该指标通常由一个二次型函数来度量。
LQR目标函数可以表示为:J(u) = ∫(x'Qx + u'Ru) dt其中,Q是一个正定矩阵,表示状态误差的加权,R是一个正定矩阵,表示控制器输入的加权,t表示时间。
5. LQR问题的求解为了求解LQR问题,我们需要通过求解贝尔曼-赫尔曼方程来确定最优控制器。
这个方程表示系统状态的最优调节与其当前状态和最优控制器有关。
贝尔曼-赫尔曼方程可以表示为:V(x) = min_u (x'Qx + u'Ru + V'(Ax + Bu))其中,V(x)表示状态x下的最优调节值。
§2.4 二次规划(QP)
98 2 x1 0.3 x2 LAG1 LAG2 0 277 0.3 x1 4 x2 LAG1 2LAG2 0
QP问题输入LINDO软件求解时,第一行(目标函数)只用于 给出模型中相应变量的出现顺序:X1,x2,lag1,lag2,用 加号连接;在实际约束前增加刚刚得到的有关变量的一阶 最优条件。 此外,必须在“END”语句后面用“QCP n”语句说明这是 一个二次规划,同时指出实际约束是从第n行开始的。
门书籍);并要使用QCP命令指明实际约束开始的行号,然后
才能求解。下面仅通过两个例子进行说明。
优化建模
例2.9
求解如下二次规划问题 :
Min s .t .
z 3 x 2 y 2 xy 0.4 y 1.2 x 0.9 y 1.1 x y 1 y 0.7
优化建模
同整数规划 时的情况类 似,二次规 划也没有敏 感性分析结 果,因此 LINDO对 应的敏感性 分析输出结 果也是没有 意义的,不 能被利用。
经过7次迭代,到了最优解:X=0.666667,Y=0.333333, 最优值为:1.3555560
优化建模
例2.10
Min
求解第1章1.2.2节例1.2给出的如下二次规Thank you very much!
L 9.8 x1 277 x2 x1 0.3 x1 x2 2 x2
2
2
LAG1 * ( x1 x2 100) LAG2 * ( x1 2 x2 )
优化建模
分别对原问题的决策变量x1 ,x2求偏导数,令其大于等于0 (这实际上是一阶最优条件),可得两个新约束如下:
备注:建议最好直接用下一章介绍的LINGO软件求解QP问题, 因为LINGO中输入的模型更接近二次规划的数学表达形式, 不容易出错,而计算效果同样很好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
佛山科学技术学院
上
课程名称 上机项目 专业班级
机
报
告
数学应用软件 求解二次规划问题 姓 名
学 号
一.
上机目的
1、求解微分方程(组)的解析解用函数 dsolve. 2、求解微分方程时,需要将微分方程包含在 dsolve 的表达式中,在表达微分方程中,用字母 D 表示求微分,D2、D3 等表示求高阶微分。任何 D 后跟的字母因变量,自变量可以指定或由 symvar 规则选定为缺省。 3、用 ode 函数求解微分方程的数值解。 二. 上机内容
1
4、求解微分方程
y' y t 1, y(0) 1,
先求解析解,在[0,1]上作图; 再用 ode45 求数值解(作图的图形用“o”表示),在同一副图中作图进行比较出相应的问题分析及求解方法,并写出 Matlab 程序。并有上机程序显示, 1、
1、求高阶线性齐次方程:y’’’-y’’-3y’+2y=0。
2、求常微分方程组
dy dx 2 x 10 cos t , x t 0 2 dt dt dx dy 2 y 4e 2t , y 0 t 0 dt dt
3、求解
分别用函数 ode45 和 ode15s 计算求解,分别画出图形,图形分别标注标题。
4
[T,Y]=ode15s('weifen3',[0 100],[1 1]); plot(T,Y(:,1),'b',T,Y(:,2),'r*');
4、求解微分方程
y' y t 1, y(0) 1,
先求解析解,在[0,1]上作图; 再用 ode45 求数值解(作图的图形用“o”表示),在同一副图中作图进行比较,用不 同的颜色表示。
求高阶线性齐次方程:y’’’-y’’-3y’+2y=0。
’’’
问题分析:求微分方程的解析解可以用函数 dsolve,其中, y 和 Dy,故
,y’’,3y’可表达为 D3y, D2y
y’’’-y’’-3y’+2y=0 可表达为 D3y-D2y-3*Dy+2*y=0。
Matlab 程序:
dsolve('D3y-D2y-3*Dy+2*y=0 ','x')
该常微分方程组可表达为 Dx+2*x-Dy=10*cost,Dx+Dy+2*y=4*exp(-2*t)。
Matlab 程序:
2
[x,y]=dsolve('Dx+2*x-Dy=10*cost','Dx+Dy+2*y=4*exp(-2*t)','x(0)=2','y(0)= 0','t') x=simple(x) y=simple(y)
7
第 3 题: Ode45:
8
Ode15s:
9
第 4 题:
10
11
3
[T,Y]=ode45('weifen3',[0 100],[1 1]); plot(T,Y(:,1),'r',T,Y(:,2),'b')
Ode15s:
function dy=weifen3(t,y) dy=zeros(2,1); dy(1)=0.04*(1-y(1))-(1-y(2))*y(1)+0.0001*(1-y(2))^2; dy(2)=-10000*y(1)+3000*(1-y(2))^2;
3、求解
分别用函数 ode45 和 ode15s 计算求解,分别画出图形,图形分别标注标题。
问题分析: 建立 M 文件,定义微分方程组,再输入命令,在命令中分别用 ode45 和 ode15s。 Matlab 程序: Ode45:
function dy=weifen3(t,y) dy=zeros(2,1); dy(1)=0.04*(1-y(1))-(1-y(2))*y(1)+0.0001*(1-y(2))^2; dy(2)=-10000*y(1)+3000*(1-y(2))^2;
问题分析:求微分方程的解析解可以用函数 dsolve,求出解析解,建立 M 文件,定义微分方程, 再输入命令,在命令中用 ode45,最后输入要画解析解函数的程序,记得要输入 hold on。 Matlab 程序:
dsolve('Dy=-y+t+1','y(0)=1','t')
5
function dy=weifen7(t,y) dy=zeros(1,1); dy=-y+t+1;
[T,Y]=ode45('weifen7',[0 1],[1]); plot(T,Y(:,1),'o') t=0:0.1:1; y=t + 1./exp(t); hold on; plot(t,y,'r')
6
四 . 上机结果 学会了编写程序,运用上机语言求出问题结果,验证结果。 第 1 题:
第 2 题:
2、求常微分方程组
dy dx 2 x 10 cos t , x t 0 2 dt dt dx dy 2 y 4e 2t , y 0 t 0 dt dt
问题分析:求微分方程组的解析解可以用函数 dsolve,其中,
dx dy , 可表达为 Dx, Dy,故 dt dt