二次规划
序列二次规划
起作用集方法
起作用集方法
(*****)
起作用集方法
起作用集方法
起作用集方法
起作用集方法
Questions
如何得到(*******)?
Answer
起作用集方法
起作用集方法
Questions
起作用集方法
起作Байду номын сангаас集方法
起作用集方法
起作用集方法
起作用集方法
Algorithm
起作用集方法
(***)
Proof
起作用集方法
起作用集方法
(a)
起作用集方法
(b)
满足(a)的 x* 肯定满足(b),且为满足(b)的 x* 的
一部分,但满足(b)的解是唯一的,所以问题(b)的解 就是问题(a)的解。
Remark
起作用集方法
起作用集方法
Questions
起作用集方法
起作用集方法
序列二次规划法
A characteristic of a large class of early methods is the translation of the constrained problem to a basic unconstrained problem by using a penalty function for constraints that are near or beyond the constraint boundary. In this way the constrained problem is solved using a sequence of parameterized unconstrained optimizations, which in the limit (of the sequence) converge to the constrained problem.
二次规划ppt课件
• 满足约束条件的点称可行点,可行点集合构成可行域
2
线性规划与非线性规划
• 非线性规划(Nonlinear Programming)
• 非线性规划的数学模型可以表示为
min f x
xRn
s.t. gi x 0 i hj x 0 j
• 在目标函数或者约束函数中至少有一个函数是非线性的 • 当非线性规划问题的可行域为整个实数域时,称为无约束优化问题,
0
优化问题无界或者不可行
• output.a lgorithm
output.iterations
优化算法类型 算法的迭代次数
• lambda.ineqlin
不等式约束的乘子
lambda.eqlin
等式约束的乘子
14
lambda.lower / upper 变量下界和上界
案例分析
• 假设有四种投资1,2,3,4,第i种投资的收益率 ri 的预期收益均值为 i E ri ,
• 在满足收益率条件下最小化风险模型:
min f x 1 xTQx 2
2 s.t. uT x M
4
xi 1, x 0
1
16
案例分析
Q 社保债券 技术交易中心 管理咨询中心 游乐中心 预期收益
社保债券 2 0.4 0.1 0 7
技术交易中心 管理咨询中心
0.4
0.1
4
3
3
6
-1
1
8
10
游乐中心 0 -1 1 10 14
方差
2 iBiblioteka Erii2
表示投资的风险大小,即收益率关于均值的偏离程度
• 令 xi 为第i个项目的投资额占总投资的比例,向量 x x1, x2, x3, x4 T表示一个
二次规划_0508

等式约束的二次规划问题
直接消去法
求解问题(1)最简单又最直接的方法就是利用约束来消去部分变量,从而把问题 转化成无约束问题,这一方法称为直接消去法。 将 A 分解成为如下形式:
A B, N
其中 B 为基矩阵,相应的将 x, c, H 作如下分块:
H12 x c H x B , c B , H 11 H 21 H 22 xN c N 其中 H11 为 m m 维矩阵。这样,问题(1)的约束条件变为: BxB NxN b
1 2 1 2 0
0 0 ,可得 Q, R, G 分别为: 1 2
5 2 3
3 4 3 4 1 , G 11 5 2 1 4
T
21 43 3 * x Qc Rb , , 于是问题的最优解为: 11 22 22
(k )
解等式约束问题:
min f x T s.t. ai x bi , i I k
(6)
其中 a i 是矩阵 A T 的第 i 列元素构成的 n 维向量。 将坐标原点移至 x 处,令 d
(k )
(k )
x x ,则: f x
(k )
T 1 (k ) T d Hd ( k ) f x( k ) d ( k ) f x( k ) 2
通过高斯消元法可得:
1 x x3 1 3 x 2 2 x 2 3 3
代入 f x 中可得到等价的无约束问题:
min x3
14 2 8 x3 x3 4 9 3
等式约束的二次规划问题
ˆ 28 H 由标准形式可知 2 9 ,显然为正定,故求其极值只需令其梯度为 0:
二次规划问题
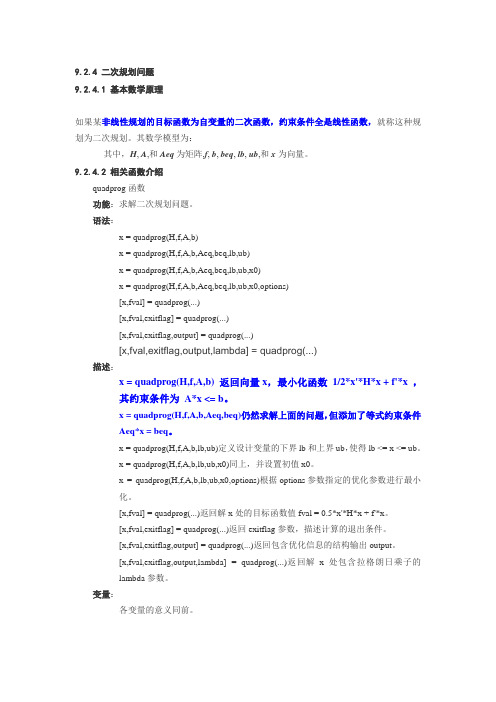
9.2.4 二次规划问题9.2.4.1 基本数学原理如果某非线性规划的目标函数为自变量的二次函数,约束条件全是线性函数,就称这种规划为二次规划。
其数学模型为:其中,H, A,和Aeq为矩阵,f, b, beq, lb, ub,和x为向量。
9.2.4.2 相关函数介绍quadprog函数功能:求解二次规划问题。
语法:x = quadprog(H,f,A,b)x = quadprog(H,f,A,b,Aeq,beq,lb,ub)x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0)x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)[x,fval] = quadprog(...)[x,fval,exitflag] = quadprog(...)[x,fval,exitflag,output] = quadprog(...)[x,fval,exitflag,output,lambda] = quadprog(...)描述:x = quadprog(H,f,A,b) 返回向量x,最小化函数1/2*x'*H*x + f'*x ,其约束条件为A*x <= b。
x = quadprog(H,f,A,b,Aeq,beq)仍然求解上面的问题,但添加了等式约束条件Aeq*x = beq。
x = quadprog(H,f,A,b,lb,ub)定义设计变量的下界lb和上界ub,使得lb <= x <= ub。
x = quadprog(H,f,A,b,lb,ub,x0)同上,并设置初值x0。
x = quadprog(H,f,A,b,lb,ub,x0,options)根据options参数指定的优化参数进行最小化。
[x,fval] = quadprog(...)返回解x处的目标函数值fval = 0.5*x'*H*x + f'*x。
第16讲 二次规划
投资一年的收益 w ' 也是一个随机变量,期望收益为
E ( w ') E (1 ) w 1 E (2 ) w 2 ,, E (n ) w n
马库维茨建议用随机变量 w ' (组合投资收益)的方差作为投资
风险的度量,即
2 D (w ' ) E ( (w ' E (w ' ) )2 )
量分解 xB x1 x2 , xN x3.
代入二次函数可得
min
x3R
4 x32
( x3
1)2
x32,
由此可解
x3
1 2
.
然后代入
xB
的表达式,得
x
1,
3 2
,
1 2
.
由 A g Gx,可知
2 1
3 1
11
0 1
1
1 2
,
从上式可求得 Lagrange 乘子1 2,2 1.
求得
x
1.9500 1.0500
,
Min
f (x) 11.0250
二.等式约束二次规划问题
1.标准形式
min q(x) 1 xTGx gT x, 2
(2)
s.t. AT x b,
其中 x Rn,b Rm, A Rnm, g Rn,G Rnn且G是对称的,
设rank( A) m.
方法 1 直接变量消去法
4.应用实例-组合投资的马库维茨模型 1952 年 Markowitz 发表了《资产选择:投资的有效分散化》
一文,奠定了资产组合的理论基础,从而推动了基金业的发展. Markowitz 最早采用风险资产的期望收益率和用方差代表
的风险来研究资产的选择和组合问题. Markowitz 的证券组合投资模型是现代证券投资理论的基
二次规划基本介绍
BXB CXC b
XB B-1C bB-1
(2) 确定被替换基本变量 x r
bi br 0) min( aik 1i m aik ark
x1 b1 x b r r xm bm
4.3二次规划
Find x min f ( x ) s. t . g ( x ) ≤ 0 ( j 1, 2,, n ) j
非线性约束优化问题
(目标函数—非线性) (约 束—非线性)
非线性优化问题
(目标函数—非线性)
线性约束优化问题
(目标函数—非线性) (约 束—线 性)
有约束优化问题
ai x( k1) bi ai ( x( k ) k d ) bi ai x( k ) bi
ai x ( k 1) bi
二次规划:不等式约束问题的有效集法
二次规划:不等式约束问题的有效集法
二次规划:其它算法简介
这就是K-K-T条件,
P
f (x)
2
x
*
g1 (x)
g1 (x) 0
二次规划
一.二次规划的数学模型 二.二次规划的最优性条件 三.等式约束二次规划的解法 四.不等式约束二次规划的有效集解法 五.其它算法简介
二次规划:最优性条件
二次规划:等式约束问题
二次规划:等式约束问题
二次规划:等式约束问题
单纯形法的小结
(一)线性规划的标准形式: (二)基本概念
m i nz c T x Ax b s.t. x 0 j
T
(1)可行解:满足全部约束条件的决策向量称为可行解。 x ( x1 , x2 ,, xn , ) (2)可行域:全部可行解所构成的空间称为可行域。 (3)最优解:使目标函数达到最小的可行解称为最优解。 (4)无界解:若目标函数无下界称为无界解。
二次规划基本介绍
二次规划基本介绍二次规划(Quadratic Programming,简称QP)是数学规划的一种特殊形式,它的目标函数是二次函数,约束条件是线性函数。
在实际应用中,二次规划被广泛应用于经济学、运筹学、工程学等领域,具有重要的理论和实际意义。
二次规划的一般形式可以表示为:$$\begin{aligned}\min_{x} \quad & \frac{1}{2} x^T Q x + c^T x \\\text{s.t.} \quad & Ax \ge b \\&Cx=d\end{aligned}$$其中,$x$是优化变量,$Q$是一个对称正定的矩阵,$c$、$b$、$d$都是列向量,$A$、$C$是约束矩阵。
在约束条件中,$Ax \ge b$表示一组不等式约束,$Cx = d$表示一组等式约束。
二次规划的优化目标是寻找满足约束条件的$x$,使得目标函数最小。
目标函数由两部分组成,一部分是二次项,一部分是线性项,其中$Q$是二次项的系数矩阵,$c$是线性项的系数向量。
由于$Q$是一个对称正定矩阵,所以二次项是凸的,使得问题具有良好的性质。
二次规划的解法有多种方法,以下介绍其中两种常用的方法:内点法和激活集方法。
内点法是一种迭代求解二次规划问题的方法。
它通过将二次规划问题转化为一系列等价的线性规划问题来求解。
在每一次迭代中,内点法通过将问题的方向限制在可行域的内部,逐渐逼近最优解。
使用内点法求解二次规划问题的一个优点是,可以在多项式时间内找到最优解,尤其适用于大规模的问题。
激活集方法是一种基于约束的求解方法。
它通过不断修改约束条件,从而求解二次规划问题。
在每一次迭代中,激活集方法选取一个子集,称为“激活集”,包含满足等式约束、不等式约束等的约束条件。
然后通过解析方法或数值方法求解这个子问题,得到对应的最优解。
该方法的优点是,可以很好地处理不等式约束和等式约束,并且收敛性良好。
除了内点法和激活集方法,还有其他的求解方法,如:序列二次规划、信赖域算法、光滑方法等。
二次规划.ppt

等式约束的二次规划问题
直接消去法 求解问题(1)最简单又最直接的方法就是利用约束来消去部分变量,从而把问题
转化成无约束问题,这一方法称为直接消去法。
将 A 分解成为如下形式:
A B,N
其中 B 为基矩阵,相应的将 x,c, H 作如下分块:
x
xB xN
,
c
cB cN
,
H
H11 H21
H12
H 22
其中 H11 为 m m 维矩阵。这样,问题(1)的约束条件变为: BxB NxN b
即:
xB B1b B1NxN (2)
等式约束的二次规划问题
将(2)代入 f x中就得到与问题(1)等价的无约束问题:
min
如果 Hˆ 2正定,则问题(3)的最优解为: x*N Hˆ 21cˆN
此时,问题(1)的解为:
x*
xx**NB
B1b
0
B1N
I
Hˆ 21cˆN
记点 x* 处的拉格朗日乘子为 λ* ,则有: AT λ* f x* Hx* c ,故知:
x1 2x2 x3 4 x1 x2 x3 2
通过高斯消元法可得:
x1 x1
2x2 4 x2 2
x3 x3
x1
1 3
x3
x2
2
2 3
x3
代入 f x 中可得到等价的无约束问题:
min
最优化二次规划

实验结果分析
迭代次数与计算时间
收敛性
记录并分析不同算法在求解各个问题实例 时的迭代次数和计算时间,评估算法的收 敛速度和计算效率。
观察并记录算法的收敛情况,包括是否收 敛、收敛速度如何等,以评估算法的稳定 性和可靠性。
1 2 3
图像处理
在图像处理中,利用二次规划方法进行图像去噪 、增强和分割等操作,提高图像质量。
机器学习
在支持向量机(SVM)、逻辑回归等机器学习算 法中,运用二次规划求解最优分类超平面或回归 模型参数。
运筹学
在物流、供应链管理等运筹学问题中,通过二次 规划求解最优的运输路径、库存策略等方案。
05 二次规划的数值实验与案例分析
模型建立与求解
模型建立
根据实际问题背景,建立相应的二次规划数学模型,包括确定目标函数、约束条件以及决 策变量等。
求解方法
二次规划问题的求解方法主要包括解析法、数值法和智能优化算法等。其中解析法适用于 小规模问题,数值法如内点法、有效集法等适用于中等规模问题,智能优化算法如遗传算 法、粒子群算法等适用于大规模复杂问题。
06 二次规划的发展趋势与挑战
CHAPTER
研究现状与发展趋势
理论研究
随着计算机技术的发展,二次规划的理论研究不断深入,包括算法 的收敛性、稳定性、复杂性等方面的研究。
应用领域拓展
二次规划在金融、经济、工程、管理等领域的应用不断拓展,如投 资组合优化、生产计划安排、物流运输等问题中。
算法改进与优化
适用范围
适用于具有不等式约束的二次规划问题。
其他方法
二次规划资料
向。
内点法的改进
• 修正内点法:引入正则化项,提高内点法的稳定性和收敛性。
• 梯度投影法:利用梯度的投影性质,简化内点法的计算。
• 并行内点法:利用多核处理器并行计算,提高计算速度。
修正牛顿法
修正牛顿法原理
• 基本思想:引入正则化项,使得海森矩阵具有更好的条件数。
• 更新公式:^(k+1) = ^k - ^(-1)^k - ^(-1),其中为步长因子。
• 敏感性分析图:绘制模型结构与最优解的关系图,直观
的可行域,从而影响最优解的值和位置。
展示模型结构变化对最优解的影响。
06
二次规划问题的拓展与推广
多目标二次规划问题
多目标二次规划问题
• 定义:多目标二次规划问题是一类求解多个目标函数的二次规划问题,目标函数
之间可能存在冲突或权衡。
• 决策变量:多目标二次规划问题需要求解一组决策变量的最优值。
非线性二次规划问题
• 定义:非线性二次规划问题是一类目标函数或约束条件为非线性函数的二次规划
问题。
• 决策变量:非线性二次规划问题需要求解一组决策变量的最优值。
• 目标函数:非线性二次规划问题的目标函数是一个非线性二次多项式函数,通常
表示为最小化形式。
非线性二次规划问题的求解方法
• 转化为线性问题:通过变量替换或线性化方法,将非线性二次规划问题转化为线性
参数变化对最优解的影响
敏感性分析的方法
• 目标函数系数变化:目标函数系数的变化会影响最优解
• 参数扫描:遍历参数取值范围,观察最优解的变化情况。
的值和位置。
• 敏感性分析图:绘制参数与最优解的关系图,直观展示
• 约束条件变化:约束条件的变化会影响最优解的可行域,
二次规划问题的一个解法及几点注记
二次规划问题的一个解法及几点注记二次规划问题是指在线性规划模型中,目标函数和约束条件均为二次函数的问题。
常见的解法有坐标下降法和半正定性法。
下面是关于二次规划问题的一个解法(坐标下降法)及几点注记。
解法:坐标下降法是一种求解二次规划问题的迭代算法。
基本思路是不断地求解当前点的搜索方向,然后在这个方向上移动,直到找到最优解为止。
具体步骤如下:1.设定初始点 x0,并求出当前点的目标函数值 f(x0)。
2.求解当前点 x0 的搜索方向 d0。
3.设定步长 t,求出下一个点 x1 = x0 + t * d0。
4.求出下一个点 x1 的目标函数值 f(x1),并与当前点 x0的目标函数值 f(x0) 进行比较。
5.若 f(x1) < f(x0),则接下来以 x1 为当前点,重复步骤 2-5;若 f(x1) ≥ f(x0),则退出迭代。
注记:1.坐标下降法的关键在于如何求解当前点的搜索方向d0。
一般来说,当前点的搜索方向 d0应该是当前点的二次梯二次规划问题的一个解法及几点注记:继续上文:注记:1.坐标下降法的关键在于如何求解当前点的搜索方向d0。
一般来说,当前点的搜索方向 d0应该是当前点的二次梯度的负方向,即 d0 = -∇2f(x0)。
2.坐标下降法的收敛速度取决于步长 t的取值。
常用的方法有常数步长法和自适应步长法。
常数步长法是指固定步长t,而自适应步长法是指根据当前点的目标函数值变化情况来调整步长 t。
3.坐标下降法的收敛性是指随着迭代次数的增加,目标函数的值会逐渐降低。
但是,坐标下降法并不能保证收敛到全局最优解,只能保证收敛到局部最优解。
4.坐标下降法的迭代次数一般较多,但是每次迭代的计算量较小,因此坐标下降法适用于线性规划问题规模较大的情况。
希望这些内容能为你的学习提供帮助!。
二次规划与非线性规划
x2
6
解
编写如下程序: h=[4,-4;-4,8]; g=[-6;-3]; A=[1,1;4,1]; b=[3;9]; [x,value]=quadprog(h,g,A,b,[],[],zeros(2, 1)) 求得
1.9500 x , Min f ( x ) 11.0250 1.0500
2.再建立M文件mycon.m定义非线性约束:
function [g,ceq]=mycon(x) g=[x(1)+x(2); 1.5+x(1)*x(2)-x(1)-x(2); -x(1)*x(2)-10]; ceq=[];
19
3.主程序youh3.m为:
x0=[-1;1]; A=[];b=[]; Aeq=[1 1];beq=[0]; vlb=[];vub=[]; [x,fval]=fmincon('fun4',x0,A,b,Aeq,beq,vlb, vub,'mycon') MATLAB(youh3)
1.写成标准形式:
2 x1 3x2 6 0 s.t. x1 4 x2 5 0 0 x1 0 x2
1 2 1 2 min f x1 2 x2 x1 x2 2 2
17
2.先建立M-文件 fun3.m: function f=fun3(x); f=-x(1)-2*x(2)+(1/2)*x(1)^2+(1/2)*x(2)^2
(6) [x,fval]= fmincon(…) (7) [x,fval,exitflag]= fmincon(…) (8)[x,fval,exitflag,output]= fmincon(…) fmincon函数可能会给出局部最优解,这与初值X0的选取有关.
序列二次规划算法

序列二次规划算法SQP算法的主要思想是通过逐步逼近的方式,将原问题转化为一系列的线性规划子问题。
每次迭代时,SQP算法都会求解一个局部的线性规划子问题,并将子问题的解作为迭代点。
然后,算法根据子问题的解进行更新,直到找到全局的最优解。
SQP算法的一般步骤如下:1.初始化变量:选取一个合适的初始点作为初始解。
2.解决线性规划子问题:根据当前的迭代点,构建一个线性规划子问题,求解得到迭代点的更新方向。
3.更新迭代点:根据更新方向和步长的选择策略,更新迭代点,并计算目标函数的值和约束条件的违反程度。
4.判断终止条件:检查目标函数的值和约束条件的违反程度是否满足停止准则,如果满足,则终止算法;否则,返回步骤2继续迭代。
在SQP算法中,线性规划子问题的构造是核心步骤之一、线性规划子问题的目标是最小化一个近似函数,这个近似函数由当前的迭代点的下降方向和目标函数的近似二次项组成,并添加了一些松弛变量以处理约束条件。
SQP算法的优点是能够处理具有非线性约束和二次约束的问题。
由于每次迭代时都解决一个线性规划子问题,所以算法收敛速度较快,尤其是在问题的约束条件属于线性和凸的情况下。
然而,SQP算法也存在一些局限性。
首先,算法对初始解的依赖性较高,不同的初始解可能会导致不同的收敛结果。
其次,算法对约束条件的可行性要求较高,对于存在强约束条件的问题,算法可能难以找到可行解。
为了克服这些局限性,研究人员提出了一些改进的SQP算法。
例如,引入了信赖域方法来解决不可行问题;采用了变尺度策略来解决初始解选择问题;引入了正则化技术来处理约束条件的松弛。
总之,序列二次规划算法是一种求解二次规划问题的有效方法。
它通过逐步逼近的方式,在每次迭代中求解一个线性规划子问题,并根据子问题的解进行更新,最终找到全局最优解。
然而,算法在一些特定情况下可能存在局限性,需要结合其他方法进行改进。
[理学]第16讲 二次规划
![[理学]第16讲 二次规划](https://img.taocdn.com/s3/m/d8bb4c6c767f5acfa1c7cdd5.png)
第一个模型是控制风险, 优化收益模型
max I E ( w ' ) s.t. D( w ' ) r ( 0)
w
j 1
n
j
1, w j 0( j 1, 2,, n)
其中r是预定的风险水平.
第二个模型是控制收益,极小化风险的模型
min 2 D( w ' ) s.t. E ( w ' ) a (a 0)
ˆ G G ( A1 )T AT A A1G A A1G ( A1 )T AT , G NN NB B N N B BN N B BB B N
1 1 1 T T 1 T ˆ bT AB c GBB ( AB ) b gB ( AB ) b 2
以及
GBB GBN gB xB AB g ,G , x , A , 相应的分解. gN xN AN GNB GNN
ˆ 1 g ˆ 正定,则由(5)式,可得唯一解: x G ˆN . 如果 G N
代入(4)式可得对应的 xB .
从而问题的最有解:
T T T ˆ 1 x AB ˆ b AB AN G g B x . 1 ˆ g ˆ G xN
由于在 D( w ' ) 中包含了各分量的二次项,这三个模型均 为二次规划模型.
模型的求解和应用
上述三个模型中均需要用到随机变量
的数学期
望和协方差矩阵,这可以通过对前若干年的各资产收 益的统计分析获得 .而这些二次规划问题在系数确定后 可用软件(如LINDO/LINGO)求解.
Matlab 中求解二次规划的命令是 [X,FVAL]=QUADPROG(H,f,A,b,Aeq,beq,LB,UB,X0,OPTIONS) X 的返回值是向量 x ,FVAL 的返回值是目标函数在 X 处的值。 (具体细节可以参看在 Matlab 指令中运行 help quadprog 后的帮 助) 。 例 求解二次规划
二次规划问题

二次规划问题二次规划(Quadratic Programming,QP)是指在一定约束条件下,优化一个二次目标函数的数学问题。
它是数学规划(Mathematical Programming)中的一种重要分支,广泛应用于工程、经济、金融等领域。
二次规划问题的一般形式如下:minimize f(x) = (1/2)*x^T*Q*x + c^T*xsubject to: Ax ≤ bAx = blx ≤ x ≤ ux其中,x 是一个 n 维向量,Q 是一个 n×n 矩阵,c 是一个 n 维向量,A 是一个 m×n 矩阵,b 是一个 m 维向量,lx 和 ux 分别是 x 的下界和上界。
二次规划问题具有以下特点:1. 目标函数是一个二次函数,有一个二次项、一个一次项和一个常数项。
2. 约束条件是线性的,可以是等式约束或者不等式约束。
3. 决策变量是一个向量,需要满足一定的边界条件。
解决二次规划问题有多种方法,常用的有凸优化、KKT 条件和梯度法等。
在工程领域,二次规划问题经常出现在优化设计、控制系统和信号处理等方面。
例如,在机械设计中,可以使用二次规划问题来优化零件的尺寸和形状,以实现最小体积和质量。
在控制系统中,可以使用二次规划问题来设计最优控制器的参数,以实现系统的最佳响应和稳定性。
在信号处理中,可以使用二次规划问题来估计信号的频率、幅度和相位,以实现最佳的信号采样和重构。
总之,二次规划问题是一种重要的数学工具,能够解决许多实际问题。
通过优化目标函数,可以得到满足约束条件的最优解,提高系统的性能和效益。
随着计算机技术的发展和数学优化算法的改进,二次规划问题的求解越来越高效和可靠,为工程、经济和金融领域的决策提供了有力支持。
二次规划
的唯一整体最优解.
证明:任意的可行解x
令p x * x.
A x* A x b
T T
A xb
T
nm
A p0
T
p Zu, u R
1 T T q ( x) ( x * p ) G ( x * p) g ( x * p) 2 q( x*) u ( Z GZ )u 2
Av 0
列满秩
与假设
v0
矛盾
( p, v) 0
K是非奇异的.
r 定理: 假设 A 为列满秩矩阵, A m , 若投影 Hesse阵 Z T GZ 正定,则满足方程组
KKT对x* , * 中x*是
min s.t
G T A
A x * g 0 * b
性条 件
例
2 2 2 min q x x1 x2 x3
s.t
x1 x2 x3 1 x2 x3 1
1 2 3
x2 x3 1 x1 2 x3
4 5
q ( x) x1 x2 x3
2 2
2
4 x32 ( x3 1) 2 x32
A* g Gx* * , 只需考虑该方程组的前 m 行就可以给出 * 1 * * AB g B GBB xB GBN xN
^
相应的最优Lagrange乘子 * 可由下式确定,
G正半定
^
G不定、负定、负半定
^
G正半定
( I GG ) g 0 问题有界
^ ^ ^
* T ˆ xB AB T b AB T AN G 1 g ˆ * * 1 ˆ ˆ G正定 xN G g x * x ˆ ˆ G 1 g N
二次规划
二次规划是特殊的非线性规划,它形式简单,既可以 使用求解非线性规划的一般方法求解,又有特定的解法; 此外,二次规划在实际中有着广泛的应用,例如著名的支 持向量机,在本质上就是一个二次规划问题.本节着重介 绍凸二次规划问题的一些性质和求解方法.
9.6.1 二次规划的基本概念与基本性质
* T i i *
m l
很 明 显 A ( x x ) =0 , 而
i 1 * i T i *
m
i m 1
A
* i
m l
T i
( x x* ) 可 以 写 成 两 部 分 之 和 ,分 别 是
根 据 x* 处 起 作 用 约 束 和 不 起 作 用 不 等 式 约 束 下 标 分 别 求 和 , 由 ( 9-56 ) 和 x H 可以推出
T 1 T ( AB ) AN F , I
(9-71)
并 且 秩 ( F)= n -m , 因 此
T 1 T G G ( A BB BN T 1 B ) AN (9-72) G N F GF ( AN AB , I ) G I NB G NN 由于 F 是列满秩的,并且 G 正定,因此 G N 也是正定的,对称性显然. 定 理 9-5 表 明 对 于 等 式 约 束 的 严 格 凸 二 次 规 划 问 题 ,可 以 用 直 接 消
9.6.2 等式约束二次规划问题
本小节讨论等式约束二次规划问题
min
f ( x)
1 T x Gx r T x, 2
(9-58)
s.t. AT x b,
其 中 ,G 为 n n 阶 对 称 矩 阵 , r 为 n 维 列 向 量 , A 为 n m 阶 矩 阵 , n m 且 秩 ( A )= m , 即 矩 阵 A 是 列 满 秩 的 .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L( x, λ) = f (x) + ∑ λ j g j (x)
j =1
m
(1) (2) (3) (4) (5)
f (x) + ∑ λ j g j (x) = 0 (梯度条件) 梯度条件)
j =1
m
g j ( x) ≤ 0
(约束条件) 约束条件) (松弛互补条件) 松弛互补条件) (非负条件) 非负条件) (正则条件或约束规格) 正则条件或约束规格)
f (x) = ci
g1 (x) = 0
x
*
f (x(0) ) x (k ) g 2 (x) = 0 x(0)
f (x(k ) )
x1
T 搜索方向满足; 搜索方向满足; f ( x)
P < 0 ,即; f ( x ) T P > 0 π f (x)T 与 P 夹角; α < 夹角;
2
am,m +1 am,m + 2
B = (p1p 2 , , p r , , p m )
f = f 0 + (c k z k ) x k
1 0 0 1 0 0 0 x1 0 x2 + 1 xm
k
B
C
XB x1 a1n b1 a1n xm b2 = xm +1 amn bm XC xn
二次规划: 二次规划:不等式约束问题的有效集法
二次规划: 二次规划:其它算法简介
�
′ a1k ′ ark x ≥ 0 k ′ amk
x B = ( x1 x2 , , xr , , xm ) B = (p1p 2 , , p r , , p m )
x B = ( x1 x2 , , xk , , xm ) B = (p1p 2 , , p k , , p m )
(10)基本可行解: 满足非负条件的基本解称为基本可行解. )基本可行解: 满足非负条件的基本解称为基本可行解.
x = (x B ,0)
(x B ≥ 0 )
时这解称为退化基本解. (11)退化基本解:基本解中至少一个分量为 时这解称为退化基本解. )退化基本解:基本解中至少一个分量为0时这解称为退化基本解
P
α>
π
2
x
*
g1 (x)
P
α< π
2
g1 (x)
g1 (x) = 0
g1 (x) = 0
P
f (x)
之间, 最优点 x* , f (x ) 一定在 g1 (x* )与 g 2 (x* ) 之间, * 非负线性组合表示. 所以 f (x ) 可以起作用的 g j (x* ) 非负线性组合表示.
*
(2-5)
BX B + CXC = b
X B + B -1C = bB -1
(2) 确定被替换基本变量 xr
br′ bi′ ′ = min ( aik > 0) ′ a′ 1≤i ≤ m aik rk
x1 b1′ x b′ r = r ′ xm bm
退化基本解 非退化基本解
退化基本可行解
(三)线性规划问题的性质 性质1: 性质 :
性质2: 性质 :
性质3: 性质 :
0
性质2 性质
性质4 性质
不等式
Hale Waihona Puke +松弛变量
可行域
可行域边界
Ax ≤ b
等式
r (≥ 0)
最优解
Bx B + Nx N ≤ b Ax ≤ b
x* ∈ x B
Bx B = b
基本可行解
Ax + r = b
x B = (x1 , x 2 , , x m ,0,0, ,0)
顶点
=
(1) 确定替换基本变量的非基本变量
a11 a12 a21 a22 am1 am 2
a1m a2 m amm
a1m +1 a1m +1
a1m + 2 a1m + 2
(2) g j (x) ≤ 0
这就是K-K-T条件 这就是 条件, 条件
f (x)
P
α>
π
2
x
*
g1 (x)
g1 (x) = 0
二次规划
一.二次规划的数学模型 二.二次规划的最优性条件 三.等式约束二次规划的解法 四.不等式约束二次规划的有效集解法 五.其它算法简介
二次规划: 二次规划:最优性条件
非线性) (目标函数—非线性) 目标函数 非线性
线性约束优化问题
非线性) (目标函数—非线性) 目标函数 非线性 (约 束—线 性) 线
有约束优化问题 线性优化问题
线性) (目标函数—线性) 目标函数 线性 线性) (约 束—线性) 线性
K-K-T条件的几何意义
(1)K-K-T条件
定义: 定义:
min f ( x) s.t g j (x) ≤ 0 ( j = 1,2, , m)
σ = (c z ) = min σ
k k i =m+1,n
i
′ a1m +1 ′ a2 m +1
′ a1k a′ k 2
′ am ,m +1 a′ ,k m
0 ′ a1n 0 b1′ ′ ′ a2 n b2 = xk ′ a′ bm mn 0
二次规划: 二次规划:等式约束问题
二次规划: 二次规划:等式约束问题
二次规划: 二次规划:等式约束问题
二次规划: 二次规划:等式约束问题
二次规划: 二次规划:不等式约束问题的有效集法
1 k min( f (x( k +1) ) f (x( k ) )) min T f (x( k ) )d k + d T T f (x( k ) )d k 2
g 2 (x)
α<
f (x) = ci
f (x) π
2 2 (x) = 0 g
夹角; 夹角; α <
π
2
f (x)
P
g 2 (x)
P
g1 (x) = 0
x*
f (x)
g1 (x)
夹角; 夹角;
f (x)
g 2 ( x) = 0
g 2 (x)
g 2 ( x) = 0
g 2 (x)
f (x)
4.非线性结构优化 非线性结构优化
4.3二次规划 4.3二次规划
Find x min f (x ) s. t . g ( x ) ≤ 0 ( j = 1, 2, , n ) j
非线性约束优化问题
非线性) (目标函数—非线性) 目标函数 非线性 非线性) (约 束—非线性) 非线性
非线性优化问题
单纯形法的小结
(一)线性规划的标准形式: 线性规划的标准形式: (二)基本概念
min z = c T x Ax = b s.t. x ≥ 0 j
T
(1)可行解:满足全部约束条件的决策向量称为可行解. x = ( x1 , x2 , , xn , ) )可行解:满足全部约束条件的决策向量称为可行解. (2)可行域:全部可行解所构成的空间称为可行域. )可行域:全部可行解所构成的空间称为可行域. (3)最优解:使目标函数达到最小的可行解称为最优解. )最优解:使目标函数达到最小的可行解称为最优解. (4)无界解:若目标函数无下界称为无界解. )无界解:若目标函数无下界称为无界解.
二次规划: 二次规划:不等式约束问题的有效集法
二次规划: 二次规划:不等式约束问题的有效集法
ai x ( k +1) = bi ai ( x ( k ) + α k d ) = bi ∵ ai x ( k ) = bi
ai x ( k +1) ≤ bi
二次规划: 二次规划:不等式约束问题的有效集法
i xB = 0 (i > 0 )
(12)非退化基本解:基本解中没有基本变量为0时,这解称为退化基本解. )非退化基本解:基本解中没有基本变量为 时 这解称为退化基本解.
i xB ≠ 0 (i = 1 2, , m) ,
(13)退化基本可行解:基本可行解中至少一个基本变量为0时这解称为 )退化基本可行解:基本可行解中至少一个基本变量为 时这解称为 退化基本可行解. 退化基本可行解. 基本可行解 可行域 可行解
Ax = b Bx B + Nx N = b 称为线性规划的 (5)基本矩阵:若 A m×n 的秩R(A) = m , 则非奇异矩阵 B m×m 称为线性规划的 )基本矩阵:
基本矩阵. 基本矩阵. 称为线性规划的非基本矩阵. 线性规划的非基本矩阵 (6)非基本矩阵: N m×( nm ) 称为线性规划的非基本矩阵. )非基本矩阵: 称为线性规划的基本变量. 线性规划的基本变量 (7)基本变量: x B 称为线性规划的基本变量. )基本变量: 称为线性规划的非基本变量. 线性规划的非基本变量 (8)非基本变量: x N 称为线性规划的非基本变量. )非基本变量: 称为线性规划的基本解. 线性规划的基本解 (9)基本解:x = (x B ,0) 称为线性规划的基本解. )基本解:
(1) f (x) = ∑ λ j g j (x)
(4) λ j ≥ 0
j =1
m
( j = 1,2, , m)
起作用的约束经过最优点 , g j ( x) = 0 , λ j ≥ 0
(3) λ j g j (x) = 0
最优点满足所有的约束条件, 最优点满足所有的约束条件
g 2 (x) = 0
g 2 (x)
λ j g j ( x) = 0 λj ≥ 0
g j (x) 线性无关
( j = 1,2, , m)
x ( 0) 处没有起作用的约束(可行域内部 g 处没有起作用的约束( x (k ) 处起作用的约束 g 2 (x) = 0