汽车列车电控制动系统制动力分配的控制算法
高速列车车辆制动系统的制动力分配算法研究
高速列车车辆制动系统的制动力分配算法研究随着高速铁路的快速发展,高速列车的运行安全性成为重要的关注点。
在高速列车中,制动系统是确保列车能够安全停车的关键组成部分。
制动力分配算法是制动系统中一个关键的技术,它决定了每个车轮上施加的制动力,以实现列车的平稳停车和避免轮胎滑移。
制动力分配算法要求能够根据列车的运行状态和运行条件合理分配制动力。
它不仅要在列车正常运行时提供稳定的制动力分配方案,还要在紧急情况下能够快速反应并调整制动力的分配,以保证列车的安全停车。
首先,制动力分配算法需要考虑到列车的运行状态。
例如,列车的速度和加速度是决定制动力分配的重要参数。
当列车速度较高且需急刹车时,制动力分配应更为集中,以便快速减速。
而当列车速度较低时,制动力分配可以较为均匀,以避免制动力过大造成轮胎滑移。
其次,制动力分配算法还需要考虑到列车的运行条件。
高速列车运行在不同的轨道条件和气候条件下,因此制动系统需要根据实际情况进行调整。
例如,在雨天或积雪天气下,轨道的摩擦系数会下降,此时制动系统应适当增加制动力以确保列车能在较短的距离内停车。
另外,制动力分配算法还需要考虑到列车的车型和车辆的负载情况。
不同类型的车辆在制动力分配上可能存在一定的差异。
例如,高速旅客列车和货运列车的制动力分配可能有所区别,因为它们的载重和车身结构不同。
制动力分配算法应根据车辆的负载情况进行调整,以保证最佳的制动效果。
为了实现高效的制动力分配算法,可以采用现代控制理论和算法。
例如,可以利用模糊控制、神经网络和遗传算法等方法来优化制动力分配。
这些方法可以根据实际情况进行参数调整和自适应控制,以提高制动系统的性能。
此外,制动力分配算法的实现还需要考虑到列车的制动系统结构和传感器设备。
制动系统通常由制动器、压力控制器、离合器和传感器组成。
这些设备需要相互配合,以实现制动力的准确分配和控制。
总结起来,高速列车车辆制动系统的制动力分配算法是确保列车安全运行的关键因素之一。
新能源车辆制动系统方案范本(四篇)
新能源车辆制动系统方案范本____年新能源车辆制动系统的方案第一部分:电动汽车制动系统1. 制动能量回收技术由于电动汽车在行驶过程中存在能量损耗的问题,制动能量回收技术成为了一项重要的创新内容。
通过引入制动能量回收装置,将制动时产生的能量转化为电能储存起来,以供驱动电动汽车使用。
这种技术不仅提高了能源利用效率,也减少了对电池的依赖,延长了电池使用寿命。
2. 制动力分配系统由于电动汽车的动力系统与传统车辆存在一定的差异,制动力分配系统需要进行相应的调整。
根据电动汽车的动力性能和质量分布等因素,合理分配前后轮制动力,提高制动效果和稳定性,并减少制动过程中的能量损耗。
3. 制动辅助系统为了提高电动汽车的安全性和稳定性,制动辅助系统也需要进行改进。
包括提供制动效果的预警系统、自动刹车系统等,以确保驾驶员在遇到紧急情况时能够及时做出反应并减少事故的发生。
第二部分:氢燃料电池汽车制动系统1. 高效制动液氢燃料电池汽车的制动系统液压系统对制动液的要求更加严格,需要使用高效制动液。
这种制动液具有较高的沸点和阻尼性能,能够更好地适应高速制动和长时间制动,提高制动稳定性和耐久性。
2. 制动力调整系统氢燃料电池汽车的动力系统与传统汽车有所不同,制动力调整系统应根据氢燃料电池汽车的特性和行驶状态进行调整,以提高制动效果和稳定性。
3. 制动信号传输系统由于氢燃料电池汽车使用的是电子制动系统,制动信号传输系统也需要进行改进。
采用更先进的传输技术,确保制动信号的准确传输,提高制动反应速度和安全性。
结论:随着新能源汽车的快速发展,制动系统作为汽车安全的核心保障之一,也需要进行相应的创新和改进。
____年的新能源汽车制动系统方案包括电动汽车制动系统和氢燃料电池汽车制动系统,通过引入制动能量回收技术、制动力分配系统和制动辅助系统等新技术,提高制动效果、稳定性和安全性,推动新能源汽车的进一步发展。
新能源车辆制动系统方案范本(二)____年新能源车辆制动系统方案一、引言二、背景分析1. 新能源车辆市场需求增加:随着环境保护要求的提高和汽车市场的竞争加剧,新能源车辆的市场需求有望继续增加。
纯电动汽车制动器的设计与开发新技术
纯电动汽车制动器的设计与开发新技术纯电动汽车的兴起与普及,对制动系统提出了更高的要求。
为了实现更高效、更安全的制动效果,制动器的设计与开发需要不断探索和创新。
本文将从电动汽车制动器的需求、设计原理、新技术等方面展开讨论。
一、纯电动汽车制动器的需求纯电动汽车与传统燃油车相比具有诸多优势,例如环保、零排放、节能等。
然而,电动汽车的特殊性也给制动器的设计带来了一定的挑战。
由于电动汽车电机的反向转换使得能量的回收成为可能,因此制动器需要具备更高效率的回收能量功能。
同时,电动汽车的重量相对较大,制动器需要具备更强的制动力与稳定性,以确保行驶过程中的安全。
二、纯电动汽车制动器的设计原理纯电动汽车制动器的设计基于电机反向转换过程中能源回收原理。
当驾驶员踩下刹车踏板时,制动器需要将车辆的动能转化为电能,并储存于电池中,以供给电动汽车的加速与行驶。
制动器的设计原理可以分为以下几个方面:1. 机械制动:传统的摩擦制动器仍然适用于电动汽车。
机械制动器主要通过摩擦片与刹车盘的摩擦来实现制动效果。
在设计中,需要考虑摩擦材料的选择、制动效率的提高以及持续工作的可靠性等因素。
2. 电子制动:电子制动器是纯电动汽车制动系统中的一种创新技术。
它主要通过电子控制单元(ECU)对电机进行控制,实现车辆的缓慢停止或按需停止。
相对于机械制动器,电子制动器可以实现更精确的制动控制和更高效的能量回收。
三、纯电动汽车制动器的新技术1. 回收制动能量优化:纯电动汽车在回收制动能量方面具有很大的潜力。
新技术的引入可以提高能量回收效率,减少能量损失。
例如,利用超级电容器或先进的能量储存系统,可以在制动时更高效地将动能转化为电能,并在需要的时候释放出来,以供给电动汽车的行驶。
2. 刹车力分配系统:传统的刹车系统主要通过踏板力来调节制动力。
然而,在电动汽车中,电动机的反向转换需要更高的控制精度。
引入刹车力分配系统可以根据车速、电池状态等参数来实现刹车力的智能调节,以实现更稳定的制动效果。
纯电动汽车刹车制动力分配策略研究
纯电动汽车刹车制动力分配策略研究一、引言纯电动汽车(Battery Electric Vehicle,BEV)作为可持续发展的一种新能源交通工具,其发展前景广阔。
然而,由于其与传统燃油汽车存在一定的不同,尤其是在刹车制动力分配方面,需要研究出适合纯电动汽车特性的制动系统策略,以保证行车安全和驾驶舒适度的提升。
二、纯电动汽车刹车系统特点纯电动汽车与传统燃油汽车相比,在刹车制动力分配方面具有以下特点:1. 回馈能量回收:纯电动汽车通过电动机把制动过程中的动能回收并转化为电能储存到电池中,这是一大优势,需要在刹车力分配策略中进行考虑。
2. 驱动力分配:在纯电动汽车中,驱动力通常是由电机提供的,因此在刹车系统中,需要考虑电机的制动力。
3. 负荷特点:纯电动汽车具有较大的静态负荷,因此在刹车时对制动力分配的要求较高,以保证刹车效果。
三、刹车制动力分配策略研究1. 电动机刹车力控制:纯电动汽车可以通过电动机的逆变器控制电机的刹车力。
根据车速、加速度等参数,调整电机的刹车力和回馈能量回收的比例,以实现最佳的制动效果。
2. 刹车分配控制:纯电动汽车通常配备了电子稳定控制系统(Electronic Stability Control,ESC),可以根据车辆的滑移情况调整刹车力的分配。
通过传感器感知车辆的横向运动状态,控制刹车力在左右轮之间的分配,以保持车辆在制动过程中的稳定性。
3. 制动系统与驱动系统的协同控制:纯电动汽车的驱动系统和刹车系统可以进行协同控制,以提高整车的刹车性能和能量回收效率。
通过电动机控制器和制动系统的信息交互,实现驱动力和制动力的协同分配,既能保证刹车安全,又能最大程度地回收能量。
4. 基于车辆动力学模型的刹车制动力分配策略:通过建立纯电动汽车的动力学模型,考虑车辆的质量、惯性、制动器特性等因素,基于最优化算法确定最佳的刹车力分配策略,以实现制动距离的最小化和驾驶舒适性的提升。
四、刹车制动力分配策略的实验验证和优化1. 实验设备与测试方法:建立实验台架,采用刹车力测量传感器对刹车力进行实时监测,在不同速度和路况下进行刹车测试,以评估刹车力分配策略的性能。
GB18565-2015《道路运输车辆综合性能要求和检验方法》

用车型要求、性能、尺寸、位置应符合GB 7258的相关要求, 且完好、无污损。
交通运输部公路科学研究院汽车运输技术研究中心
三、标准变化及要点
交通运输部公路科学研究院汽车运输技术研究中心
三、标准变化及要点
6、行驶系 ▲车架▲车桥▲拉杆和导杆▲车轮及螺栓、螺母▲减振器 ▲悬架
▲轮胎 (1)轮胎的胎冠、胎壁不得有长度超过25mm或深度足以 暴露出帘布层的破裂和割伤以及凸起、异物刺入等影响使用 的缺陷,并装轮胎间应无异物嵌入。 (2)具有磨损标志的轮胎,胎冠的磨损不得触及磨损标 志;无磨损标志或标志不清的轮胎,乘用车和挂车的胎冠花 纹深度应不小于1.6mm;其它车型的转向轮的胎冠花纹深度 应不小于3.2mm,其余轮胎胎纹深度应不小于1.6mm。
交通运输部公路科学研究院汽车运输技术研究中心
三、标准变化及要点
螺栓残缺不全
交通运输部公路科学研究院汽车运输技术研究中心
三、标准变化及要点
交通运输部公路科学研究院汽车运输技术研究中心
三、标准变化及要点
▲ 悬架 (1)弹性元件
悬架的弹性元件,如钢板弹簧、螺旋弹簧、扭杆弹簧、 橡胶减震垫等弹性元件应安装牢固,不应有裂纹、缺片、加 片、断裂、塑性变形和功能失效等现象,空气弹簧不应有泄 漏现象。 (2)部件连接
心处的向心加速度达到0.35g时,车辆不发生侧翻或侧滑,危险 货物运输专用车辆以及罐式车辆应达到0.4g。
交通运输部公路科学研究院汽车运输技术研究中心
浅析CRH380B型动车组制动系统控制技术

浅析CRH380B型动车组制动系统控制技术1. 引言1.1 概述CRH380B型动车组是中国铁路运输主要的高速列车之一,具有较高的运行速度和运行效率。
在动车组的运行中,制动系统被视为至关重要的部件之一,能够确保列车在紧急情况下安全停车,保障乘客和列车的安全。
制动系统控制技术是CRH380B型动车组制动系统的核心,通过控制技术实现列车的快速减速和平稳停车。
在本文中,我们将对CRH380B型动车组制动系统控制技术进行详细分析和探讨。
我们将进行制动系统的整体概述,包括其组成部分和工作原理。
接着,我们将深入探讨制动系统控制技术的原理,包括利用信号传输、执行机构和控制器实现制动操作的过程。
然后,我们将分析制动系统控制技术在实践中的应用现状,并对系统的优势和不足进行评估。
我们将讨论技术改进的方向,探讨如何进一步提升CRH380B型动车组制动系统的控制技术水平。
通过对这些内容的深入分析,我们将更好地理解和掌握CRH380B型动车组的制动系统控制技术,为未来的研究和应用提供参考和指导。
1.2 研究背景CRH380B型动车组作为中国高铁列车的重要一员,其制动系统控制技术是确保列车运行安全的重要保障。
随着中国高铁网络的不断扩展和运输量的增加,CRH380B型动车组的稳定性和安全性要求也越来越高,因此对其制动系统控制技术的研究显得尤为重要。
由于动车组运行速度快、列车重量大、运行环境复杂,使得其制动系统控制技术面临着诸多挑战和问题。
如何实现列车快速平稳地制动、如何保证列车在不同运行环境下的制动效果均衡等,都是当前研究的重点和难点。
随着科技的进步和高铁制造技术的不断提高,CRH380B型动车组制动系统控制技术也在不断更新和完善。
对其研究背景进行深入了解,可以更好地把握当前技术发展的方向和趋势,为未来的研究工作提供有力支持。
1.3 研究意义CRH380B型动车组作为中国高速铁路的重要载体,其制动系统控制技术的研究具有重要的实践意义和理论意义。
动车组制动力分配方式研究
动车组制动力分配方式研究随着交通运输业的不断发展,高铁作为交通运输的标志性产物,越来越成为人们出行的首选。
动车组制动力分配方式作为高铁的重要组成部分,对高铁行车安全和舒适性起着至关重要的作用。
因此,针对动车组制动力分配方式的研究显得尤为重要。
目前,动车组制动力分配方式主要有两种形式,即集中控制制动和分散控制制动。
1.1 集中控制制动集中控制制动是指整个车队在一个司机室内由司机进行掌控。
其特点是调度节点简单,且具有较高的技术可靠性。
同时,集中控制制动也可以集中监控全车,掌握车辆的状态。
分散控制制动是指车队中每辆车都有独立的司机室,每辆车独立实现控制制动。
其特点是运营效率高,灵活性较强,同时还可以使整个车队的安全性更高。
集中控制制动主要涉及到集中控制台的控制模式和制动模式。
在控制模式方面,主要研究了开发能够解决集中控制台出错或者电源故障等问题的备用方案;在制动模式方面,除了要保证控制台的准确性外,还可以研究采用新的控制算法来提高制动效率。
2.2 分散控制制动研究分散控制制动主要涉及到车辆间的协调和数据的共享。
为了实现车辆间的协调,需要采取一种统一的通讯协议,使得各个车辆之间能够相互通信。
另外,为了实现数据共享,需要采取一种实时同步的方式,使得车辆之间的状态能够及时地共享。
为了进一步提高动车组制动力分配方式的效率和安全性,需要对其进行优化。
具体来说,可以从以下几个角度入手进行优化。
3.1 车辆制动调度通过车辆制动调度,可以实现更加灵活、高效的调度模式,使得车辆之间的制动能够更加协调、更加平衡。
同时,还可以通过调整车辆的制动方式和力度来平衡车辆之间的制动差异,提高运行的稳定性和安全性。
3.2 制动力分配算法制动力分配算法可以直接影响车辆的制动效率和安全性。
因此,需要针对不同的运行环境和需求,开发出适合的制动力分配算法,并通过优化算法参数、选择最优的制动力分配方案来提高车辆的制动效果和安全性。
3.3 制动系统性能优化制动系统性能的优化可以通过针对轮轴、制动缸、阀门等部件进行优化,以提高制动系统的效能和稳定性。
高速列车车辆制动系统的制动力控制策略与协调

高速列车车辆制动系统的制动力控制策略与协调引言:随着科技的进步和经济的发展,高速列车在现代交通中扮演着越来越重要的角色。
高速列车的安全性和运行效率对乘客和社会都至关重要。
在高速列车运行过程中,车辆制动系统的制动力控制策略与协调是确保列车安全停车的关键因素之一。
本文将介绍高速列车车辆制动系统的制动力控制策略与协调的相关内容。
一、背景在高速列车运行过程中,制动力控制策略是确保列车安全运行和停车的关键组成部分。
制动力的准确控制可以确保列车平稳停车,并避免制动过度或制动不足导致的安全风险。
二、制动力控制策略1. 制动力的实时调整高速列车车辆制动系统需要能够根据列车的实时速度和制动距离要求,调整制动力的大小。
通过搭载传感器和系统算法,能够根据列车的运行状态和目标停车位置,实时调整制动力的大小,以确保列车在规定的停车距离内平稳停车。
2. 制动力的均衡分配高速列车通常由多节车厢组成,每个车厢都配备了制动设备。
为了保证列车的制动力分配均匀,需要制定制动力均衡分配策略。
这需要根据列车的负荷情况、车厢的数量和位置等因素来进行计算和调整,以使每个车厢的制动力能够均衡分配,避免制动力过度集中在某些车厢上。
3. 制动力与速度的关联控制制动力与列车速度之间存在一定的关联性。
在高速列车的制动过程中,需要根据列车的当前速度和目标停车速度,动态调整制动力的大小。
当列车速度较高时,需要较大的制动力来减速;当列车速度逐渐降低时,制动力可以相应减小以确保列车平稳停车。
三、制动力协调1. 制动系统的协同控制高速列车通常配备了多个制动器,包括电子制动器和气动制动器等。
为了实现制动力的协调控制,这些制动器之间需要进行协同工作。
通过制动系统中的控制算法和通信协议,实现制动器之间的数据交流和协同控制,以确保制动力的协调分配和控制效果的最优化。
2. 制动力控制与牵引力控制的协调高速列车在运行过程中,除了需要制动力控制外,还需要进行牵引力的控制。
在制动力控制策略中,与牵引力控制之间需要进行协调。
汽车列车电控制动系统制动力分配的控制算法
19 9 3年 , O C 公 司 与 S A I 公 司合 作 开 发 的 B SH C NA E S系统 应用 于 S A I B C N A牵 引车 和挂车 上 ;9 6年 , 19 WA C B O公 司的 E S应用 于 奔驰 A T O B C R S系 列 车 型 上, 克诺 尔制 动 器 制造 股 份 公 司 也 开 发 了商 用 车 电
l / i uik环境 中根 据控制 算 法建 立控 制 器模 型 , a Sm l b n
并与 T c s u r ki m软件 中的车辆模 型联 合仿 真 。通过对 比安 装常 规制 动 系统 、 B A S系统 和 E S系 统 车辆 模 B 型在 高 附着 和低 附着 路 面上直线 制 动 的仿 真结果 验
围 内 , 证行 车安全 。 保 ( )电子制 动力 分配控 制 的车 轮滑 移率 范 围为 3
8 ~1 % , % 5 当任何 一个 车 轮 的滑 移 率 超过 1 % 时 , 5 各 个车 轮 均 增加 制 动压 力 , 至 A S系 统 起 作用 。 直 B
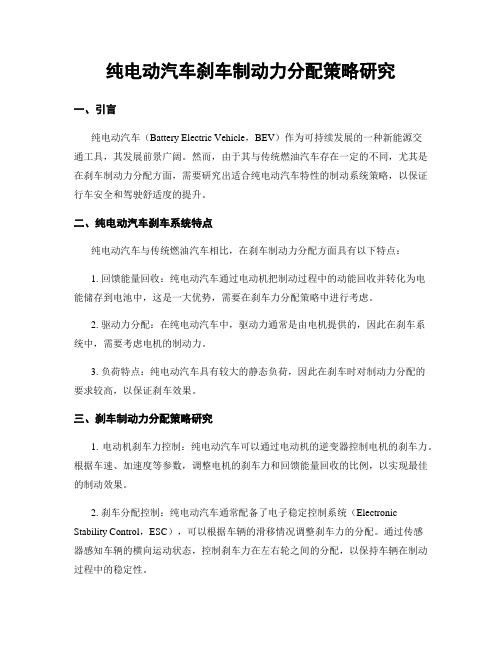
车轮 制动气 室压 力信号 。控 制器框 图见 图 2 。
车速
蓑号 喜
AB S
滑移率
气室
踏 板信 号 压力 制动力 分 配
当车速低 于 5 m h时 , k/ 由制 动踏板 控制制 动压力 。
通过 以上过程 , 实现 了从 常 规制 动 到 制 动力 分 配控制 , 到 A S系 统 起 作 用 的平 稳 过 渡 “ 。 再 B 在进入 A S系统 控 制时 , B 各个 车 轮对路 面 附着 系数
高速列车车辆制动系统的安全性能评估与优化
高速列车车辆制动系统的安全性能评估与优化随着高速列车的飞速发展,车辆制动系统的安全性能日益凸显。
对高速列车车辆制动系统进行全面的安全性能评估与优化,可以提高列车运行的安全稳定性,保障乘客的出行安全。
本文将就高速列车车辆制动系统的安全性能评估与优化进行探讨。
1. 车辆制动系统的安全性能评估高速列车车辆制动系统的安全性能评估主要包括以下几个方面:1.1 刹车距离评估:刹车距离决定了列车的停车安全性。
在评估过程中需要考虑车辆制动的反应时间、制动力的大小和牵引力等因素。
通过对列车模型的建立和仿真分析,可以确定列车在不同速度下的刹车距离,并进行合理的调整和优化。
1.2 制动力分配评估:刹车系统的制动力分配对列车的安全性能有着重要影响。
合理的制动力分配可以保持列车的稳定性和平衡性,防止轮胎磨损不均、制动不足或制动过度等问题。
通过模拟分析和试验验证,可以确定最佳的制动力分配策略。
1.3 刹车性能评估:刹车性能评估是评价车辆制动系统安全性能的重要指标之一。
刹车性能包括刹车响应时间、刹车力大小、刹车稳定性等。
通过实车试验和仿真分析,可以对刹车系统的性能进行评估,并对不足之处进行改进和优化。
1.4 制动温度评估:车辆长时间高速行驶会产生大量热量,对制动系统的温度要求较高。
过高的制动温度会导致制动力下降或制动失效,影响列车的安全性能。
通过温度传感器和监控系统实时监测制动温度,并进行合理的导热设计和冷却策略,可以提高制动系统的安全性能。
2. 车辆制动系统的安全性能优化针对高速列车车辆制动系统的安全性能评估结果,可以进行以下方面的优化措施:2.1 系统故障预防:通过利用先进的故障诊断技术和系统监控装置,可以实时监测制动系统的工作状态,并在出现故障前进行预警。
及时发现和排除故障,可以防止故障扩大化,提高制动系统的可靠性和安全性能。
2.2 制动力分配策略优化:根据车辆的速度、负载和牵引力等因素,调整和优化制动力的分配策略。
合理的制动力分配可以保持列车的稳定性和平衡性,提高刹车效果,减少制动距离,提高制动系统的安全性能。
基于减速度参数的电子制动力分配控制算法

Co t o l o ih f e e t o i r k n o c it i u i n n r la g rt m o lc r n c b a i g f r e d srb to
■■■ ■■●●
一 一
b s d o e ee a i n p r m ee s a e n d c l r to a a t r
Z a g Y n h i uL a g a ,S n in h nJ n h n o g u ,e K yL b rtO o uo t S ft a d E eg T ig u nvri , e ig1 0 8 C ia Sa e a oa , f t ie a y n n r t o A mo  ̄ e y, s h a U i s y B in 0 0 4, hn ) n e t j
u i g v h ce a d whe l e ee a in p r me e swe e p o o e n o r s o d n sn e il n e s d c l r t a a tr r r p s d a d c re p n i g EBD o e s s we e o prc se r
i O R NA1 O F I I ANG SU
N V ERSiIY{ ;t ce c ii n — 1 { S in eEd to } 1 mi
? 1 一
俊
d i 0 3 6 / .sn 1 71—7 7 . 0 0. 6 0 6 o :1 . 9 9 j i . 6 s 7 5 2 1 0 .0
Absr c t a t:Ba e n t e t - e lv h c e mo l t e p i cpl fe e to c b a n o c itiut n s d o h wo wh e e i l de , h rn i e o lcr ni r kig f r e dsrb i o
纯电动汽车电液制动力分配计算方法
05
纯电动汽车电 液制动力分配 计算方法的未 来发展
01
纯电动汽车电液制动力 分配计算方法的概述
纯电动汽车电液制动力分配计算方法的定义
纯电动汽车电液制 动力分配计算方法 是一种用于计算纯 电动汽车电液制动 系统制动力分配的 方法。
该方法基于车辆动 力学和制动系统原 理,通过数学模型 和算法实现制动力 分配的计算。
局限性
纯电动汽车电液制动力分配计算方法的优势
提高制动性能:通过精确计算和控制,实现更快速、更稳定的制动效果。 节能环保:减少对传统制动系统的依赖,降低对环境的污染。 提升驾驶体验:提供更加平稳、舒适的制动感觉,提高驾驶安全性。 降低维护成本:减少机械部件的磨损和更换,降低维修保养成本。
纯电动汽车电液制动力分配计算方法的局限性
纯电动汽车电液制动力 04 分配计算方法的应用场
景
纯电动汽车电液制动力分配计算方法在车辆设计中的应用
制动系统设计:根据电液制动力分配计算方法,优化制动系统的设计,提高制动性能和安全性。
车辆稳定性控制:通过电液制动力分配计算方法,实现车辆在不同行驶状态下的稳定性控制, 提高车辆行驶的平稳性和安全性。
添加标题
在计算过程中,该方法会根据车辆的实时状态和车轮 的附着条件,对制动力进行动态调整,以确保车辆在 制动过程中的稳定性和安全性。
添加标题
该方法通过综合考虑车辆的行驶状态、车轮的附着条 件以及驾驶员的制动意图等因素,计算出最优的制动 力分配方案。
添加标题
纯电动汽车电液制动力分配计算方法的原理基于对车 辆动力学和制动系统特性的深入理解和研究,能够为 纯电动汽车的制动系统设计和优化提供重要的理论支 持和实践指导。
提升车辆稳定性:合理分配电液制动力,降低车辆在高速行驶或紧急制动 情况下的侧滑和失控风险,提高车辆行驶稳定性。
半挂汽车列车制动力分配研究
由图4的轮胎纵向特性图(高附着路面上的制动力系数
lo;
o.9f
轮胎纵向特性 峰值附着系数邱
的条件,使得鲁=万Fh2=巧Yb3=:’=卫g,即达到理想的制动力
分配。
1.4制动力分配控制算法实现
如图5所示,控制算法采用整车减速度闭环控制和各轴 滑移率闭环控制的双闭环控制结构。减速度闭环控制用于控 制整车减速度跟随驾驶员的减速度要求,其中踏板信号给出 了车辆目标减速度要求,车辆的实际减速度由三轴轮速信号
490
SAE.C2010E1 12
2010中国汽车工程学会年会论文集
半挂汽车列车制动力分配研究
任小荣‘1’ 陈慧‘1’ 汪惠林‘2’
1.同济大学汽车学院2.浙江瑞立集团
【摘要1
本文在理论分析和离线仿真验证的基础上,提出一种半挂汽车列车各轴的制动力动态分配控制方法,即采用
整车减速度闭环控制和各轴滑移率闭环控制的策略来间接分配和控制各轴制动力。该控制方法使整车的减速度不再受载荷变 化的影响,有助于提高驾驶舒适性,同时各轴的制动力比例关系与各轴的载荷比例关系维持一致,达到了理想的制动力分配 效果。此外,由于各轴的滑移率保持一致,可以避免轮胎磨损的不均一性问题。
实际减速度的差值可实时调节各轴的目标滑移率指令,而各 轴的滑移率闭环控制则通过实时调节各轴的制动力(即制动 力分配)得以实现。
图5控制算法原理示意图
2仿真分析
2.1仿真模型
图6为半挂汽车车辆参数结构。 表1半挂汽车列车车辆结构参数表
名 称 符号 单位 参 数
名
称
符号
工1
单位
mm mm mm mm
参
3500 3000 950 1200 1260
力值。
基于动态轴荷的电控制动系统制动力分配控制算法
基于动态轴荷的电控制动系统制动力分配控制算法动态轴荷是指车辆在行驶过程中,在不同路面条件下,不同轮子所承受的车轮荷载分布情况。
由于每个轮子的承受荷载并不完全相同,因此在电控制动系统中需要进行制动力分配控制,以达到更好的制动效果。
本文将介绍一种基于动态轴荷的电控制动系统制动力分配控制算法。
首先,电控制动系统通过感知车速、转向角度、加速度和车辆姿态等信息,获取车辆在路面上的状态信息。
然后,通过计算每个轮子的荷载分布情况,确定每个轮子所承担的制动力比例。
制动力分配控制算法可以通过多种方式实现,例如,基于阈值比较的硬件方式或者基于模型预测的软件方式。
本文介绍的制动力分配控制算法采用软件方式实现。
基于动态轴荷的电控制动系统制动力分配控制算法,将车辆分为前后两个部分,每个部分依据各自轴荷计算出制动力配比。
其中,前轴的制动力配比为前轴荷 / 总轴荷,后轴的制动力配比为后轴荷 / 总轴荷。
通过这种方式,可以更加准确地计算出每个轮子的制动力分配比例,从而提高整车的制动效果。
此外,为了进一步提高电控制动系统的制动灵敏度和响应速度,可以将动态轴荷数据与车辆动力学模型相结合,实现制动力分配的实时调节。
具体来说,可以使用反馈控制算法,通过比较期望制动力分配比例和实际制动力分配比例之间的差异,调节控制策略,以达到更好的制动效果。
综上所述,基于动态轴荷的电控制动系统制动力分配控制算法是一种优化车辆制动效果的有效方法。
通过综合考虑车辆状态信息和动力学模型,并使用反馈控制算法实现实时调节,可以实现更加精准、灵敏的制动力分配控制。
这一技术的应用有望为汽车制造商和驾驶员带来更加平稳、安全的行驶体验。
另外,基于动态轴荷的制动力分配控制算法还有助于优化车辆性能。
例如,在高速行驶过程中,前后轴荷分布不均会导致车辆的不稳定性增加,降低安全性能。
通过调节制动力分配比例,可以改善车辆的稳定性能,提高驾驶体验。
同时,在紧急制动情况下,基于动态轴荷的制动力分配控制可以避免车轮被卡死或者翻滚等危险情况的发生。
制动力分配算法范文
制动力分配算法范文制动力分配算法是指在制动系统中,根据各个车轮的制动需求和系统的限制条件,确定各个车轮的制动力分配比例的一种算法。
制动力分配的目的是使车辆在制动时能够保持稳定的姿态,最大程度地减少制动距离,提供更好的驾驶控制性能和安全性。
1.车轮的制动需求:车辆在制动时,不同车轮对制动力的需求可能不同。
例如,前轮对制动力的需求通常大于后轮,因为前轮在制动时会负责承担更多的重量和制动由于动力传递而产生的惯性力。
因此,制动力分配算法需要根据车轮的位置和车辆的动态参数来确定各个车轮的制动力需求。
2.制动系统的特性:车辆的制动系统通常会对制动力的分配设置一些限制条件,以确保系统的稳定性和安全性。
例如,制动系统可能会设置最大制动力的限制,以防止车轮的锁死;也可能会设置前后制动力的平衡要求,以确保车辆在制动时保持平衡。
制动力分配算法需要考虑这些限制条件,同时满足车轮的制动需求。
3.车辆的动态特性:车辆在制动时会存在一些动态特性,例如前部下沉、重心的变化等。
这些特性会影响车轮的接地压力分布,从而影响制动力的分配。
制动力分配算法需要考虑车辆的动态特性,以提供稳定的制动力分配。
根据以上考虑因素,可以设计不同的制动力分配算法。
下面介绍一种常用的制动力分配算法:前后轮制动力分配算法。
前后轮制动力分配算法是一种简单有效的制动力分配算法。
该算法基于以下假设:1.车辆的重心随制动力的分配不发生改变;2.制动力的分配仅考虑前后轮的重量以及轮胎和路面的摩擦系数。
根据上述假设,可以根据车辆的重量和前后轮的摩擦系数来确定前后轮的制动力分配比例。
具体算法如下:1. 根据车辆的重量和重心位置,计算前后轮的载荷比例。
例如,若车辆总重为1000kg,前后轮载荷比例为60:40,则前轮的载荷为600kg,后轮的载荷为400kg。
2.根据前后轮的载荷比例和轮胎与路面的摩擦系数,计算前后轮的制动力分配比例。
例如,若前轮的摩擦系数为0.8,后轮的摩擦系数为0.7,则前轮的制动力分配比例为600*0.8/(600*0.8+400*0.7)≈0.56,后轮的制动力分配比例为1-0.56≈0.443.根据计算得到的前后轮制动力分配比例,将制动力按比例分配给前后轮。
动车组制动力分配策略
动车组制动力分配策略陈澍军;高珊;孟庆栋;谢春杰;梁建全【摘要】现有动车组采用电制动和空气制动相结合的制动方式,根据实际工况和制动需求的不同采用不同的制动力分配方案.文中针对现有制动系统中车辆制动力存在故障时各单元施加制动力差距较大问题,提出一种由列车制动管理器根据各单元制动力能力值和载重比进行单元制动力分配,再由分段制动管理器在单元内按照等磨耗原则分配各车制动力的整车制动力分配策略.考虑多种工况下对制动力的需求,基于ControlBuild软件搭建动车组整车制动力分配逻辑,仿真结果表明,所提出的制动力分配策略可有效提高列车制动效率,保证列车运行安全.【期刊名称】《铁道机车车辆》【年(卷),期】2018(038)004【总页数】7页(P24-29,33)【关键词】动车组;电制动;空气制动;制动力分配策略【作者】陈澍军;高珊;孟庆栋;谢春杰;梁建全【作者单位】中车唐山机车车辆有限公司,河北唐山063000;中车唐山机车车辆有限公司,河北唐山063000;中车唐山机车车辆有限公司,河北唐山063000;中车唐山机车车辆有限公司,河北唐山063000;中车唐山机车车辆有限公司,河北唐山063000【正文语种】中文【中图分类】U266.2制动系统是列车高速运行的安全保障,需要设计良好的控制策略来保证安全停车[1-2]。
目前动车组采用的是空电复合的直通式电空制动系统,通过列车网络来传递制动控制指令和制动设备的状态,实现制动系统和列车上其他系统之间的交互[3-4]。
目前制动系统的协调控制方面在现场应用时还存在一些问题[5-8],因此研究动车组电空混合制动控制算法具有重要的意义。
以动车组整车制动系统为研究对象,利用ControlBuild软件搭建整车制动力分配逻辑,对各种制动工况和制动方式下的车辆制动力动态分配进行分析。
由列车制动管理器根据各单元制动力能力值和载重比进行单元制动力分配,再由分段制动管理器在单元内按照等磨耗原则分配各车制动力,对电制动故障、空气制动故障、滑行以及停车情况下各车的制动力分配进行仿真分析,仿真结果表明搭建的制动力分配逻辑能够有效的提高制动效率,确保列车能够安全运行。
基于动态轴荷的电控制动系统制动力分配控制算法
汽车安全检测-仪器设备检验-制动性能检验

仪器设备检验制动检验陈南峰2015年3月项目载客汽车载货、专项车挂车三轮车摩托车非营运小、微其它类型载客6.8.1 行车制动6.8.1.1 台试空载检验行车制动性能时,应符合GB 7258-2012中7.11.1的相关要求。
6.8.1.2 对于全挂车、半挂车,台试空载制动性能检验时,应同时满足以下要求:a) 与牵引车组合成的汽车列车检验结果符合GB 7258-2012中7.11.1的相关要求;b) 挂车的轴制动力之和与挂车轴荷之和的比值大于等于55%;c) 挂车的轴制动不平衡率符合GB 7258-2012中7.11.1.2的要求。
【说明】(1)各车型按本标准表1规定的检验项目检验空载制动性能。
(2)将牵引车与挂车(全挂车、半挂车)组成汽车列车进行检验,可同时检验与计算得到牵引车及挂车制动性能数据,牵引车也可单独检验。
当半挂牵引车组合成铰接列车实施台式制动性能检验时,判定半挂牵引车制动性能是否合格只需对牵引车进行评价,列车制动性能不作为牵引车制动性能评价依据。
空载制动率●●●●●●空载制动不平衡率●●●●加载轴制动率○○加载轴制动不平衡率○○a 、三轴及三轴以上的货车、采用并装双轴及并装三轴的挂车测试加载轴制动率和加载轴制动不平衡率。
6.8.1.3 对于三轴及三轴以上的多轴货车,按照附录C.3方法加载后,加载轴的轴制动率应大于等于50%,加载轴制动不平衡率符合GB 7258-2012中7.11.1.2的要求。
【说明】对于三轴及三轴以上的多轴货车,应当按6.8.1.1、6.8.1.2要求检验空载制动性能,同时还应按本条要求对部分车轴实施加载检验。
项目载客汽车载货、专项车挂车三轮车摩托车非营运小、微其它类型载客6.8.1.4 对于并装双轴、并装三轴的半挂车,组成汽车列车按照附录C.3方法加载后,加载轴的轴制动率应大于等于45%,加载轴制动不平衡率符合GB 7258-2012中7.11.1.2的要求。
【说明】对于并装双轴、并装三轴的半挂车,应当按6.8.1.1、6.8.1.2要求检验空载制动性能,同时还应按本条要求对部分车轴实施加载检验。
超全制动力分配方法

Treg (n)T
Treg ig i0 r
' reg
电机能够提供的驱动轮处最大再生制动力Freg为:
Freg
T
3.4 可充电功率的约束 SOC增大,电池内阻也显著增大。 SOC又不能太小,否则电池放电功率减小。 超级电容的内阻随充放电电流的增大而减小
3.5 再生制动模糊控制方法
制动强度0.2≤ z < 0.7时 再生制动比例变化
第五步:若制动需 求较小,电机再生 制动能力可满足需 求制动力,则前轴 再生制动力由模糊 控制器确定的再生 制动力比例乘以电 机再生制动能力计 算,若仍能满足需 求制动力,则前轴 液压制动不起作用, 否则,不足部分由 液压制动补充。
第六步:防抱制动控制。
3.7 制动力分配计算举例 研究一辆电机前置、前驱动,有液压制动系的 纯电动汽车,其整车参数如下:满载质量1 187 kg,质心高度0.5m,轴距2.6m,质心至 前轴距离1.04m,风阻系数0.335,迎风面积 2.0m2 ,滚动阻力系数0.009,车轮半径0.282 m;传动系参数为:主减速比3.24,变速器各 档传动比分别为3.78,2.12,1.35,0.97 和 0.76;电机参数为:额定功率30kW,额定转矩 89.6 N∙m,最高转速4 000 r/min,额定转速3 200 r/min。
Fxb1
z 0.07 G b zhg 0.85 L
Fxb2 Gz Fxb1
前轮抱死时, 为保持车辆稳 定和制动效率, 后轮必须具有 一定的制动力
模拟的车辆参数为: 满载质量1187kg,质 心高度0.5m,轴距 2.6m,质心至前轴距 离1.04m,车轮半径 0.286m
n nb n nb
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
¨"¨¨¨¨旺叭o
(1)制动开始时,随着制动踏板位移的增加,制
动器的制动力不断增大。半挂汽车列车因各个车轮 的垂直载荷不同,车轮的滑移率不同。当某个车轮 的滑移率达到8%时,电子制动力分配系统开始起
作用。
图1控制算法流程图
(2)如果是前轴车轮先达到8%的滑移率,使 后两轴车轮的滑移率跟随前轴车轮的滑移率。考虑 到车辆的制动稳定性,同时保证车辆较高的制动效 能,使牵引车后轮的目标滑移率为前轮的90%,半 挂车车轮的目标滑移率为前轮的95%。当牵引车 后轮或半挂车车轮先达到8%的滑移率时,将这两 轴车轮的目标滑移率均设为8%。当制动踏板行程 继续增加,前轮滑移率超过8%时,另外两轴车轮的 目标滑移率开始跟随前轮滑移率并且大于8%。前 轴车轮的制动力由驾驶员通过制动踏板控制,这样 既呵以使汽车列车充分利用路面的附着系数,又可 以控制牵引车后轮和半挂车车轮的滑移率在安全范 围内,保证行车安全。 (3)电子制动力分配控制的车轮滑移率范围为 8%~15%,当任何一个车轮的滑移率超过15%时, 各个车轮均增加制动压力,直至ABS系统起作用。 当车速低于5km/h时,由制动踏板控制制动压力。 通过以上过程,实现了从常规制动到制动力分 配控制,再到ABS系统起作用的平稳过渡¨0。“J。 在进入ABS系统控制时,各个车轮对路面附着系数 的利用率均达到了较高的水平,不仅缩短了制动距 离,而且提高了制动时半挂汽车列车的稳定性。控 制算法流程图如图1所示。图中s为所有车轮最大 滑移率,s,为牵引车前轮最大滑移率,s:为牵引车后
上,克诺尔制动器制造股份公司也开发了商用车电 子控制制动系统。目前,EBS系统集成了ABS、ASR
+国家自然科学基金项目(51075176)和中国博士后基金项目(20110490158)资助。 原稿收到日期为2011年7月21 13,修改稿收到日期为2011年8月8日。
万方数据
・886・
汽车工程
2011年(第33卷)第10期
车速 。。
嘉蓑嘉号盖勇
ABS
滑移率气室
踏板信g-压力 制动力分配
m m m m ●2¨4
LU 车速
』Inl饥¨ Out2
车速判断
1........,....一
m
—L
气室
U
轮速
个10utILl
-tln2
I.................._J
压力
m一逻 5一辑丽
滑移率计算
阿
1..........一
图2控制器框图
半挂车
3 665
700(至铰接点)
I 863 510 l 935 0 7
2” 7挡自动
3仿真与分析
采用Simulink与Trucksim联合仿真。车辆模型 为控制器模型提供轮速及车速信号,控制器模型通 过计算为车辆模型提供制动气室压力信号。 仿真条件为紧急制动,转向盘转角为00,车辆 空载。为了验证控制算法在不同附着系数路面上的 控制效果,联合仿真时选择附着系数为0.8、初速为 80km/h和附着系数为0.3、初速为40km/h两种工 况进行直线制动仿真,并对比常规制动、ABS制动和 EBS制动3种条件下的仿真结果。 3.1高附着路面仿真结果 图3为高附着路面制动距离仿真曲线,常规制 动、ABS制动和EBS制动的制动距离分别为48.25、 36.93和33.95m。与常规制动和ABS制动相比, EBS均可有效缩短制动距离。
of combination vehicle,in which the
rate
objective
Байду номын сангаасslip
rates
of
tractor's
rear
wheels and semitrailer's wheels change with
on
of
tractor's
front wheel.A CO-simulation with Matlab/Simulink and Trucksim software
善韫馥需器
∞帖们"如筋加”m,o
0 1 2 3 4 5 6
时闻A
时11日/8
图3高附着制动距离曲线
图6高附着安装EBS车辆车速和轮速曲线
万方数据
888・
汽车工程
2011年(第33卷)第10期
图7、图8和图9为高附着路面制动气室压力变 化仿真曲线。由图可见:常规制动时制动气室压力 很快上升到最大值,并未根据制动工况进行调节; ABS控制对制动气室压力进行了调节,从而防止车 轮抱死;EBS比ABS更早介入控制,可以在制动开 始时合理分配制动力。
的附着条件,增大制动减速度,缩短制动距离。
半挂汽车列车以其装载量大、运输成本低和便 于进行甩挂运输等优点而在商用车中占有重要地 位。常规气压制动系统由于管路较长,制动响应时
间长。电控制动系统(electronic
controlled braking
system,EBS)实现了制动过程的电子控制,可以大 幅缩短制动响应时间,从而缩短制动距离。EBS未 来还可应用于电动车等新能源车,从而提高制动性 能。国外对于EBS系统的开发始于20世纪末¨‘4 J。 1993年,BOSCH公司与SCANIA公司合作开发的 EBS系统应用于SCANIA牵引车和挂车上;1996年,
汽车工程 2011年(第33卷)第10期
Automotive Engineering
2011(V01.33)No.10
2011180
汽车列车电控制动系统制动力分配的控制算法术
宗长富1,李伟1,郑宏宇1,王化平2
(1.吉林大学,汽车仿真与控制国家重点实验室,长春130025;2.瑞立集团有限公司,瑞安325200)
30.39、25.20和24.01m。与常规制动和ABS制动 相比,EBS均缩短了制动距离,但缩短的百分比小于 在高附着路面制动工况。这主要是由于路面附着系 数低,紧急制动时车轮很快进入ABS控制,制动力 分配功能作用时间较短,因而未能充分利用路面附 着条件。
0
1
2
3
4
5
6
时间甩 图1 I低附着安装常规制动车辆车速和轮速曲线
证了控制算法。
轮滑移率,s,为半挂车车轮滑移率。
1控制算法的开发
研究表明哺。9 J:牵引车前轮先抱死时,汽车将失 去转向能力,如果受到侧向力干扰,可能出现跑偏, 此时可通过操纵制动踏板及加速等方式恢复稳定行 驶;牵引车后轮先抱死时,可能出现折叠现象,此时 车辆无法恢复稳定行驶状态,处于危险工况;半挂车 车轮先抱死时,可能出现甩尾现象,如果操作适当, 可恢复稳定行驶状态。根据车辆制动时的可控制 性,以上3种情况的危险程度由高到低依次为折叠、 甩尾和失去转向能力。因此当车轮无法同时抱死 时,理想的抱死顺序为牵引车前轮、半挂车车轮和牵 引车后轮。根据以上分析,提出如下控制算法。
Keywords:combination vehicle;EBS;braking force distribution;control algorithm
日IJ舌
和ESP等多种控制功能。该系统正在欧美商用车市 场上快速普及,国内还处于研究阶段∞。7j。 EBS系统在制动过程中,主、挂车均在驾驶员的 控制下产生制动力。汽车列车各个车轴理想的制动 力分配应与车轮的垂直载荷成正比,与路而附着系 数、汽车载荷和制动强度等因素有关。合理的制动 力分配可提高车辆的制动稳定性,同时可使各个车 轮均有较高的附着系数利用率,从而充分利用路面
3.2低附着路面仿真结果 图10为低附着路面制动距离仿真曲线。常规 制动、ABS制动和EBS制动的制动距离分别为
万方数据
2011(V01.33-)No.10
宗长富,等:汽车列车电控制动系统制动力分配的控制算法
一{彗卅
蚰驺蓦:茚柏”m;0
图12
一盅)互一、艘许
柏"∞巧∞”m;o
0 2 3 4 5 6
【摘要]
为汽车列车提出了一种基于滑移率的电控制动系统制动力分配算法,即根据不同情况,使牵引车后
轮和半挂车车轮的目标滑移率随牵引车前轮滑移率而变化。运用Matlab/Simulink和Trucksim软件进行列车在高 附着和低附着路面上行驶的联合仿真,结果表明该算法能缩短汽车列车的制动距离,提高了制动稳定性。
踏板模拟
万方数据
2011(V01.33)No.10
宗长富,等:汽车列车电控制动系统制动力分配的控镧算法
・887・
2.2车辆模型 本文中的车辆模型采用Trucksim软件中的半挂 汽车列车车辆模型。整车模型分为车身模型、空气 动力学模型、传动系模型、制动系模型、轮胎模型、悬 架模型和转向系模型7部分。部分整车参数见表1。 表1部分整车参数
Weil,Zheng Hongyul&Wang
Huapin92
325200
Simulation and Control,Changchun
130025;2.Ruili Group Corporation。Ruian
[Abstract]
the slip
ning
on
A slip—rate-based braking force distribution algorithm is proposed for the electric braking system
can
vehicle
ixln—
both high and low adhesion roads is performed.The results show that the algorithm
shorten the braking
distance of combination vehicle,enhancing its braking stability.
牵引车 空载质量/kg 轴距/m 轮距/mm 车轮半径/mnl 质,L,高imm 最大制动压力/MPa 发动机功率/kw 变速器