基于故障树的无人潜航器可靠性研究
基于故障树的在轨服务目标航天器故障检测
be feasible by
example of electricity supply
problems of on・orbit
analysis;knowledge base;knowledge acquisition;knowledge representation
0
引言
在轨飞行器对目标航天器实施在轨故障检测,
求得顶事件发生概率,即系统不可靠度。设故障树 有刀个底事件,每个底事件发生概率为R (1≤f≤力),顶事件发生概率为E,则第f个底事
嚣一
.硌墨
件的概率重要度定义为些或垫,关键重要度定义
M3=X3M4=X3(X2+X5)=恐X3+为墨
M=X4+M3=X4+X2X3+X,:(5
M5=X拨'5
为业或垫上量。 诹l一足
3
母裁)输出l^I髻鬻
圈圜圈幽圆圈圈幽
通过下行法或上行法可求得该故障树的最小割
集为{蜀),{恐},{局而),{x3.As},{x3,x9),{x3.Xlo),
涵坞),陋趣),陇山),∞石o),隅尚), Ⅸ疋},{x5山),{x5为0),%∞),%五),
由其最小割集可以看出,当该负载出现无输入 电压这一故障时,其最基本的原因共有18种可能, 显然为下一步专家系统对故障的推理分析带来难 度。此时,可以对故障树采取定量分析,求故障树 的不可靠度和底事件的概率重要度。在对故障树进 行定量分析前,一般要作如下假设:一是底事件间 相互独立;二是顶事件和底事件只考虑故障和正常 2种状态。假设本文中故障树符合此条件。 示例故障树中各个底事件发生的概率(不可靠 度)分别为:Fl=F2=0.1 5,F3=F4=Fs=F6=FT=Fs=F9= 一o=0.12。由于本案例中故障树最小割集的数目庞 大,有18个之多,直接通过最小割集求不可靠度会 很复杂。将故障树中与门变换为或门,或门变换为 与门,各事件变为相应对立事件,就得到原故障树 的对偶树。对偶树最小割集对应原故障树最小路集, 通过对原故障树最小路集不交化求得系统可靠度。 顶事件的对立事件用S表示,则对偶树的最小 割集即原故障树的最小路集表达式为: T=S=XIX2I、X3x4Xsx6+x7 Xsx9XI沪
基于故障树的某型无人机助推器分离异常故障诊断方法
基于故障树的某型无人机助推器分离异常故障诊断方法
付凡;孙英超;黄海龙;王再玉
【期刊名称】《教练机》
【年(卷),期】2017(000)001
【摘要】由于故障树的各节点之间有很强的逻辑和层次关系,因而由故障树生成的诊断模式具有很强的条理性和针对性,本文简述了故障树建模方法和故障处理步骤,并通过某型无人机助推器故障诊断实例得到了验证,该方法可适用于目前大多数飞行器故障分析.
【总页数】4页(P56-59)
【作者】付凡;孙英超;黄海龙;王再玉
【作者单位】空军驻江西地区军事代表室,江西南昌330024;中国航空工业洪都,江西南昌330024;中国航空工业洪都,江西南昌330024;中国航空工业洪都,江西南昌330024
【正文语种】中文
【相关文献】
1.基于故障树分析法的某型航空电子装备故障诊断方法研究 [J], 赵锋;景建方
2.某型无人机固体火箭发动机助推器尾流场数值研究 [J], 姚金华;余文锋;江海涛;孙林
3.基于故障树的某型无人机助推器分离异常故障诊断方法 [J], 付凡;孙英超;黄海龙;王再玉;
4.基于复Morlet变换和改进AlexNet神经网络的柴油机气门间隙异常故障诊断方
法 [J], 赵志坚;茆志伟;张进杰;江志农
5.基于Teager算子的内燃机气门间隙异常故障诊断方法 [J], 张晓帆;吴亚龙;么子云;茆志伟;江志农
因版权原因,仅展示原文概要,查看原文内容请购买。
【民航精品课件 系统可靠性分析】09-故障树模型(FT)

符号
说明
禁门:
A
仅当“禁门打开条件”发生时,输入事件B发生才导致
禁门打开条件
输出事件A发生;
打开条件写入方框内。
B
顺序与门:
A 顺序条件
B
仅当输入事件B按规定的“顺序条件”发生时,输出事 件A才发生。
A
非门:
输出事件A是输入事件B的逆事件。
B
2013-11-24
9
故障树常用转移符号
符号
说明
相同转移符号(A是子树代号,可用字母数字代替):
而事件标号不同的子树去”,不同的事件标号在三角形
旁注明。
右图表示“相似转移符号所指子树与此处子树相似但 事件标号不同”。
2013-11-24
10
故障树示例
工人坠落 死亡
工人坠落
·
工作高度超过XX米, 下方无阻拦物
安全带设施 未起作用
1
工人失足 坠落
+
身体重心在 船台外
1
安全带设施 未起作用
工作面 打滑
+
安全带设施 的缺陷
未使用 安全带
工人身体 失去平衡
+
+
飞机因发动机故障 不能飞行
2/3
D 发动机A 故障
发动机B 故障
发动机C 故障
D
D
+ 事件符号X7~X12 事件符号X13~X18
X1
E
X4
E
·
+
X2
X3
X5
X6
安全带 支撑物坏
安全 为移动 带坏 工作地
点而卸除
工人疏 忽未用
2013-11-24
可对冷、温和热储备进行建模,在主要事件发生 故障后,根据某种顺序触发储备单元工作。
基于故障树的AUV可靠性研究的开题报告

基于故障树的AUV可靠性研究的开题报告一、研究背景无人潜水器(AUV)随着科技的不断进步,正成为海洋探测、水下勘探、海洋资源开发等领域中的一种重要工具。
但是,AUV在水下环境中面临着复杂多变的海洋环境和水下设备的高度依赖性,使其易受到各种意外因素的影响,导致其在执行任务过程中的故障率和维修成本都较高。
因此,对AUV的可靠性研究具有重要的现实意义和实际应用价值。
故障树分析是一种系统性分析和描述设备故障的方法,可用于定位故障的根本原因,并提供针对性的解决方案。
AUV在执行任务过程中,可能会出现的错误因素较多,如水压、水温、水下视线穿透度等海洋环境因素,另外还存在多种设备故障因素,如电池电量不足、电子模块失效、通信中断等等。
结合故障树分析方法,可以对可能的故障因素进行系统性地分析,理解AUV故障的根本原因,进而从设计和制造层面上提升AUV的可靠性。
二、研究目的和意义本研究通过对AUV的故障树分析,旨在分析AUV在执行任务中可能面临的各种故障因素,进而定位其根本原因,并提供相应的解决方案。
具体地,研究目的包括:1. 分析AUV在不同环境下可能出现的故障因素,提高对AUV故障的诊断能力。
2. 探究故障树分析在AUV可靠性研究中的应用,提高AUV的可靠性。
3. 提出针对AUV故障因素的优化方案,避免或减少故障的发生。
三、研究方法和实施方案本研究将采用以下方法:1. 研究前期,对AUV的相关技术和相关实现方案进行调研,梳理其技术和应用现状。
2. 在采集足够的AUV数据并构建故障事件数据库的基础上,进行故障树分析。
3. 借助专业工具,创建AUV故障树模型,进一步分析AUV的故障因素和根本原因,并提出相应的改进方案。
4. 通过案例分析,验证故障树分析方法在AUV可靠性研究中的有效性和实用性。
四、预期的研究成果1. 理解AUV的主要故障因素和可能存在的故障路径。
2. 提出改进措施,在设计和制造阶段上提高AUV的可靠性和安全性。
基于故障树的航天测控系统故障诊断方法
基于故障树的航天测控系统故障诊断方法作者:周琦钧赵秋颖朱明明来源:《现代电子技术》2015年第07期摘要:航天测控设备种类结构复杂,长期以来主要依赖人工维护,缺乏通用有效的故障诊断方法。
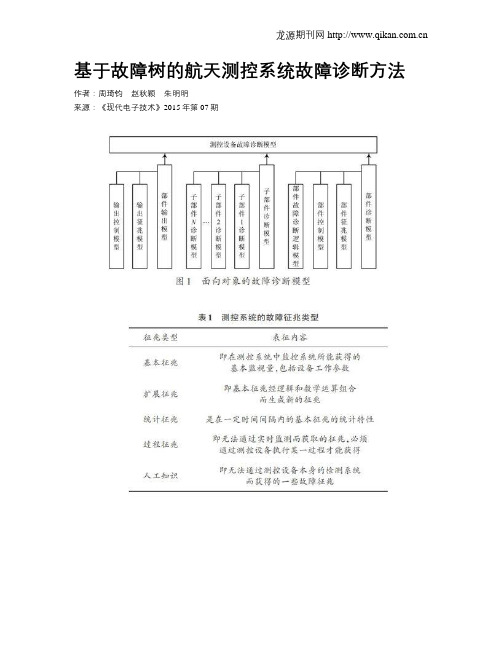
针对这一情况,在分析了测控系统故障诊断特点的基础之上,采用故障树分析法构建了面向航天测控系统的故障树模型,并阐述了建模方法和推理机设计原理及流程。
最后,以航天测控系统故障诊断实例进行了方法验证。
验证结果表明该方法效率高、可靠性好,可适用于目前大多数航天测控设备。
关键词:航天测控系统;故障诊断;故障树;混合推理中图分类号: TN95⁃34; TP391.4 文献标识码: A 文章编号: 1004⁃373X(2015)07⁃0103⁃040 引言随着现代航天测控设备规模的扩大和设备复杂性增加,使得传统基于人工的故障诊断方法难以满足设备的使用维护要求,造成了设备的可靠性和可用性的降低,制约了航天测控任务的顺利完成。
另外,由于测控设备系统结构复杂、功能繁多,许多故障征兆不易测量和获取,难以建立用于自动故障诊断的动态模型,使得基于信号和基于解析模型的诊断方法可用性下降。
针对上述问题,要进行切实有效的故障诊断,就需要对测控设备的故障诊断逻辑进行有效抽象,从而获得合理的故障传递途径,以降低故障知识的获取难度。
而故障树作为有效的诊断方法,本文提出了一种基于故障树的航天测控系统故障诊断模型。
1 故障树诊断技术故障树分析法(Fault Tree Analysis,FTA)是指对可能造成产品故障的硬件、软件、环境、人为因素进行分析,并将系统故障形成的原因由总体至部分按树枝状逐级细化,以图形演绎的方法画出故障树,从而确定故障原因的各种可能组合方式和其发生概率,评价引发故障的各种因素的相关重要度的一种分析方式,具有下述优势:(1)可根据最小路集和最小割集,确定系统全部正常模式和故障模式;(2)可根据底事件发生概率,求出故障模式的发生概率,并可按概率大小排序,确定各个故障模式影响大小;(3)在每个故障模式中,底事件按关键重要性排序,确定造成故障的各底事件影响大小;(4)可据故障树层次结构,诊断进行到要求的某一级别层次的故障原因。
基于故障树法的船舶舱室人因可靠性研究
21 0 2年 1月
舰
船
科
学
技
术
Vo . 4, No. 13 1
S P CI HI S ENCE AND TECHNOLOGY
J n , 01 a . 2 2
基于故障树法的船舶舱室人 因可靠性研究
陈炉云 , 张裕 芳
( 海 交通 大 学 船舶 海 洋与建 筑工程 学 院 , 上 上海 2 0 4 ) 0 2 0
Ab ta t T ep r oeo u nrl bly a ay i( sr c : h up s f ma ei i t n lss HRA)st rvd u ni t ec n lso r h a i i op o ieaq a t ai o cu inf t v o
0 引 言 人 一Fra bibliotek系统包 含人 、 机 机器 设 备 、 织 、 境 等 4个 组 环 组 成部 分 , 由客观 存在 的设 备和具 有 主观能 动性 的操
贝叶斯 网络 建 立 了相 应 的人 因 可靠 性 的 评 估 模 型 。
Per 分析 了人 为失 误 原 因 , 人 的可 靠性 评 估 方 i e r 将
( c ol f aa A ci cue O enadCv n ier g S a g a J o n Sh o o vl rht tr, ca n iiE gnei ,h nh i i t g N e l n a o U i ri ,h n hi2 0 4 , hn ) nv sy S a g a 0 2 0 C ia e t
d tc h a on s o a ma h n y tm . n t i a e , y d fn d t e f u to e ai n mo e s t e ee tt e we k p i t fa m n- c i e s se I h s p p r b e e h a l p r t d la h i o b t m v n , a e n i,h r a e b id n h a l te o a ay i h uma e ib l y o h p r to ot o e e t b s d o t t e e h v u l i g t ef u t r e t n lsst e h n r l ii ft e o e ain a t d s n t e h p h m b r h n m e ia e u t s o e k i h s i c a e .T e u rc l r s ls h w t a h fu t te a ay i me h d s a a l o h t t e a l r e n lss t o i c p be f d ai g wi h uma eibi t n l ss o n ma h n y tm , n ti eib e a d p a t a . e ln t t e h h n r la l y a ay i fma — c i e s se i a d i sr la l n r c i 1 c K e o ds: h ma e ib l y a ay i ;a to e a in mo e ;a l te . n— c i e s se yw r u n r l ii n lss ful p r to d l fu t r e; a t ma ma h n y t m
基于故障树的航天器故障诊断专家系统研究

we can express knowledge totally, systematically, and logically when building fault
programming design technology, we try to develop the fault diagnosis expert system
of spacecraft, which verified has better application prospect.
Key words: fault tree analysis, fault diagnosis, expert system, ITEM, spacecraftiii
2.1 故障树分析法中的基本概念和符号 ................................................................. 9
2.2 故障树分析方法的特点 ................................................................................... 10
据库,应用人工智能诊断方法和面向对象的程序设计方法,开发了航天器姿态
控制发动机故障诊断专家系统,验证了该方法具有良好的应用前景。
关键词:故障树分析法,故障诊断,专家系统,ITEM,航天器ii
ABSTRACT
With scientific and technological development, the design of a spacecraft must
基于故障树分析的飞机故障预测与修复技术研究
基于故障树分析的飞机故障预测与修复技术研究随着航空业的不断发展,飞机故障的预测和修复技术日益重要。
飞机故障不仅会影响客户的体验,还会对航空公司造成损失。
因此,开发一种基于故障树分析的飞机故障预测与修复技术是至关重要的。
故障树分析(FTA)是故障诊断和预测领域中最常见的方法之一。
它通过将系统的故障原因与系统中的组件进行关联,将故障原因转化为故障树的形式。
这种方法通过逐步细化故障的可能原因,使得故障的预测和诊断变得更加准确和可靠。
在飞机故障的预测方面,故障树分析可以通过将已知故障与系统组件相关联,来预测未来可能会发生的故障。
例如,如果一个组件已经在过去多次出现过故障,那么这个组件在未来出现故障的可能性就很高。
利用故障树分析,我们可以找到造成过去故障的根本原因,并基于这些原因开发出相应的预测模型。
在飞机故障的修复方面,故障树分析同样具有重要的作用。
通过识别故障树中的关键节点,我们可以确定故障的主要原因,并提出相应的修复方案。
例如,如果我们发现一个组件因为不适合某种环境而导致故障,那么修复这个问题的方法可能就很简单:更换一个适合这种环境的组件。
这种修复方法不仅可以避免类似的问题,还可以提高整个系统的可靠性。
然而,故障树分析也存在一些局限性。
首先,故障树分析建立在对系统组件和故障原因的清晰认识上。
如果我们对某个组件或故障原因的理解不够深刻,那么建立的故障树就会失去准确性。
其次,故障树分析只能识别与已知故障相关的节点。
如果我们没有收集到足够的过往故障数据,或者已知故障涉及到未知的组件或原因,那么故障树分析就无法进行。
另外,故障树分析本身对于大规模系统的建模复杂度也很高。
在军事和商业航空领域,飞机系统通常由数千个组件构成,这些组件之间相互关联。
在这种情况下,进行故障树分析会变得非常困难。
为了解决这个问题,目前的研究工作主要关注于优化故障树分析算法,以及开发基于机器学习的方法来代替手动建模。
总之,基于故障树分析的飞机故障预测与修复技术具有重要的应用价值。
船艇设备监测中的故障树分析
直追 查 到无需 再深 究 的因素 为止 。
2 机舱 故 障分 析
相关措施预防故障的发生 , 达到减少甚至是避免损失
的 目的 。
船 艇机 舱 中存在 着 大 量 的机 电设 备 , 任 何 设 备 的
故障都会给船艇运行造成重大影响,因此对设备 的监
测 非 常重要 。随着机 械 设 备 的 维修 日渐 得 到 重视 , 油 液 监测 技术 已经 在机 械设备 的状 态监 测与 故障诊 断 中 发 挥 了重要 作用 。油 料发 射光 谱分 析技术 是油 液监测
2 0 1 3年 第 1 O期
DOI : 1 0 . 1 1 8 3 2 / j . i s s n . 1 0 0 0 - 4 8 5 8 . 2 0 1 3 . 1 0 . 0 1 4
液 压 与 气动
5 3
船艇 设 备 监测 中的故 障树 分 析
吴汪洋 。刘 瑜 , 李 晓晨
一
随着机 械设 备 的精 细 化 程 度越 来 越 高 , 对 设 备 的 状 态监 测显得 尤 为重要 。油液监 测技 术作 为设 备运 行 状 态监 测 的重 要 方 法 , 已经 得 到 越 来 越 广 泛 的应 用 。 如 同我 们 自己的“ 血液 ” 检 测 一样 , 油液 监 测 同样 是 对 遍 布 于机械设 备 周身 的润 滑油进 行成 分或 磨损 颗粒 的 分析, 以得 到机械 设备 故 障前期 的磨 损信 息 , 进 而采 取
Fa u l t T r e e An a l y s i s o f t h e Oi l Mo n i t o r i n g Ap p l i e d t o t h e B o a t
W U Wa n g — y a n g ,LI U Yu ,LI Xi a o . c h e n
基于动态故障树的航空装备系统可靠性评估方法
基于动态故障树的航空装备系统可靠性评估方法
孙卓;胡勇
【期刊名称】《火力与指挥控制》
【年(卷),期】2022(47)5
【摘要】为分析复杂航空装备系统的可靠性,提出了基于动态故障树的航空装备系统可靠性评估方法。
在传统故障树基础上,引入动态逻辑门,构建系统的动态故障树模型。
将动态故障树模块化为独立的静态子树和动态子树,并采用马尔科夫模型进行求解,通过综合分析得到系统失效的概率。
运用构建的动态故障树模型,对航空电子系统的可靠性进行了分析和评估,验证了动态故障树用于航空装备系统可靠性评估的有效性和可行性。
【总页数】7页(P141-146)
【作者】孙卓;胡勇
【作者单位】空军勤务学院航材四站系
【正文语种】中文
【中图分类】TJ85
【相关文献】
1.基于故障树分析法的某型航空电子装备故障诊断方法研究
2.基于空间故障树理论的系统可靠性评估方法研究
3.基于故障树分析的航空装备体系结构贡献率评估方法
4.基于动态故障树和贝叶斯网络结合的配电系统可靠性建模及评估
5.基于T-S 模糊故障树方法的惯性导航系统可靠性评估
因版权原因,仅展示原文概要,查看原文内容请购买。
基于故障树分析的飞机安全性评估方法研究
基于故障树分析的飞机安全性评估方法研究飞机是一种高度安全性要求的交通工具,因此飞机安全性评估在航空工程中占据着重要地位。
故障树分析技术是一种重要的可靠性分析方法,可以较为全面地分析和评估飞机的安全性。
本文将围绕基于故障树分析的飞机安全性评估方法展开研究,旨在探究如何利用故障树分析技术来提升飞机的安全性。
一、故障树分析基础故障树分析是由贝尔实验室创始人哈洛德·威尔逊于1961年提出的一种可靠性分析技术。
它采用“布尔逻辑”思想,将一个系统的故障图形式地表示为一棵树,在此基础上进行形式分析,得到系统故障产生的根本原因和最终结果。
故障树分析的核心是树的构造方法,其流程如下图所示:故障树中,由事件和逻辑门组成,其中“事件”表示系统的故障或失效,而“逻辑门”则表示各种可能导致故障或失效的原因。
逻辑门包括与门、或门和非门,它们分别表示“并联关系”、“串联关系”和“互斥关系”。
经过逐层分析,故障树的底层事件代表了系统故障或失效的原因,称为基本故障事件(Basic Event)。
基本事件可以通过一组逻辑“门”的组合得到,这个组合称为“顶事件”(Top Event)。
从顶事件开始,逐层向下推导分析,直到基本事件板块的事件,这个誓言称为系统分析。
二、基于故障树分析的飞机安全性评估方法在飞机安全性评估中,故障树分析可以帮助工程师们从系统角度全面地研究故障事件,找到其根本原因,进而采取有效措施提高飞机的安全性。
1.建立故障树建立飞机的故障树,需要先进行飞机系统的梳理和划分,将各个部分分解成具体的功能,然后建立各自的故障树。
例如,对于引擎部分,可以按以下步骤建立故障树:1.识别相关的系统和分段;2.列出这些系统的功能描述;3.找到每个功能故障和失效可能会被导致的根本原因,并进行分类分组;4.建立由逻辑门和其他基本事件组成的故障树。
2.故障树分析飞机故障树建立后,需要采用故障树分析方法来进行系统安全性分析,进而预测和识别出潜在的风险。
基于故障树分析的航天器加强梁胶接接头可靠性提升
第 40 卷第 5 期航 天 器 环 境 工 程Vol. 40, No. 5 2023 年 10 月SPACECRAFT ENVIRONMENT ENGINEERING567 https:// E-mail: ***************Tel: (010)68116407, 68116408, 68116544基于故障树分析的航天器加强梁胶接接头可靠性提升李莺歌1,杨 强2,张 璇3,王晓宇2,陈 佳1(1. 中国空间技术研究院 通信与导航卫星总体部; 2. 北京空间飞行器总体设计部;3. 北京卫星制造厂有限公司:北京 100094)摘要:针对某航天器舱体结构试验件在静力试验过程中发生的加强梁胶接接头脱开问题,通过对试验件设计和工艺技术状态进行分析,建立故障树;继而采用求取故障树最小割集和对研制过程进行排查的定性分析方法,确定造成故障的主要原因,并提出相应的改进措施。
经地面试验和在轨飞行验证,证实故障定位准确,改进措施有效,能提高结构系统的可靠性。
有关分析方法和措施可为航天器加强梁胶接接头结构设计和工艺改进提供参考。
关键词:复合材料;胶接接头;故障树分析;定性分析;补片中图分类号:V414.7; V416.6文献标志码:A文章编号:1673-1379(2023)05-0567-08 DOI: 10.12126/see.2023031Reliability improvement of a spacecraft reinforced beamadhesive joint based on fault tree analysisLI Yingge1, YANG Qiang2, ZHANG Xuan3, WANG Xiaoyu2, CHEN Jia1(1. Institute of Telecommunication and Navigation Satellites, China Academy of Space Technology;2. Beijing Institute of Spacecraft System Engineering;3. Beijing Spacecraft Manufactory Co., Ltd.: Beijing 100094, China)Abstract: In view of the disconnection fault occurring at the adhesive joint of the reinforced beam in the static test of a spacecraft cabin structure, a fault tree was established by analyzing the design and process status of the test piece. The main causes of the fault were then identified by a qualitative analysis method to obtain the minimum cut set of the fault tree and troubleshoot the development process. In addition, the corresponding improvement measures were proposed. The ground test and in-orbit flight verification proved that the fault location was accurate and the improvement measures were effective, which verified the reliability of the structural system. The proposed analysis methods and measures may provide a reference for the structural design and technological improvement of beam adhesive joint for spacecraft.Keywords: composite materials; adhesive joint; fault tree analysis; qualitative analysis; patch收稿日期:2023-03-13;修回日期:2023-09-25引用格式:李莺歌, 杨强, 张璇, 等. 基于故障树分析的航天器加强梁胶接接头可靠性提升[J]. 航天器环境工程, 2023, 40(5): 567-574LI Y G, YANG Q, ZHANG X, et al. Reliability improvement of a spacecraft reinforced beam adhesive joint based on fault tree analysis[J]. Spacecraft Environment Engineering, 2023, 40(5): 567-5740 引言复合材料加强梁具有重量轻以及结构强度、刚度高等显著优点[1-2],在航天器结构中主要通过胶接轻型金属接头[3]来承受或传递结构在航天器发射和太空着陆等任务阶段的集中冲击载荷。
航空航天系统可靠性与故障诊断方法研究

航空航天系统可靠性与故障诊断方法研究航空航天系统可靠性与故障诊断方法研究一、引言航空航天系统的可靠性和故障诊断一直是航空航天领域的重要研究方向。
可靠性是指在特定的时间段内,航空航天系统在规定条件下实现预定功能的能力。
故障诊断是指通过收集和分析系统信息,找出系统故障或故障原因的过程。
航空航天系统的可靠性和故障诊断方法对于提高航空航天系统的安全性和性能具有重要意义。
本论文将着重介绍航空航天系统可靠性与故障诊断方法的研究进展。
二、航空航天系统可靠性分析航空航天系统可靠性分析是通过对系统的功能、结构和环境等方面进行分析,找出系统故障的潜在原因和影响,从而评估系统的可靠性。
常用的可靠性分析方法有故障树分析(FTA)、事件树分析(ETA)和失效模式与影响分析(FMEA)等。
故障树分析是一种基于逻辑关系的可靠性分析方法,将系统故障以树状结构进行表示,通过对各个故障事件发生的概率和故障路径的计算,得到系统故障的概率。
故障树分析可以帮助工程师们找到关键的故障路径,从而采取相应的措施来提高系统的可靠性。
事件树分析是一种基于逻辑关系的可靠性分析方法,通过将故障发展过程以树状结构表示,分析故障事件的发展路径和最终结果的概率,从而评估系统的可靠性。
失效模式与影响分析是一种研究系统故障模式和其对系统功能的影响的方法。
通过对系统中各个组件的失效模式进行分析,并评估其对系统功能的影响程度,可以确定系统中最容易发生故障的组件,并制定相应的维护和修复策略,从而提高系统的可靠性。
三、航空航天系统故障诊断方法航空航天系统的故障诊断方法主要包括模型基于方法和数据驱动方法两种。
模型基于方法是指通过建立系统的数学模型,通过模型运行结果与实际观测结果的比较,来判断系统的故障。
常用的模型基于方法有状态估计、卡尔曼滤波、扩展卡尔曼滤波等。
状态估计是一种通过对系统状态进行估计,判断系统是否发生故障的方法。
它通过对系统中各个状态量进行测量和估计,并与系统模型进行比较,从而判断系统是否正常。
基于故障树法的船舶舱室人因可靠性研究

基于故障树法的船舶舱室人因可靠性研究故障树法是可靠性工程中常用的一种方法,通过建立故障树来分析系统故障的因果关系,从而找出导致故障的最根本原因。
在船舶舱室人因可靠性研究中,故障树法同样可以发挥重要作用。
首先,我们需要确定分析的对象——船舶舱室系统。
该系统包括了各种设备、仪器以及人员等多个方面,因此我们需要仔细分类并逐一分析。
例如,可以将船舶舱室人员分为操作人员、维护人员、驾驶员等,针对每一类人员进行分析。
接下来,我们需要列出故障树的基本结构。
故障树通常由根事件、顶事件和中间事件组成。
在船舶舱室人因可靠性研究中,根事件可以是某种天气条件恶劣,导致船舶航行不稳定;顶事件可以是人员误操作导致事故;中间事件则是影响顶事件的因素,如操作人员没有接受过足够的培训,可能导致误操作等。
然后,我们需要对每个节点进行分析,并确定它们之间的因果关系。
例如,对于一个中间事件(如操作人员没有接受过足够的培训),我们需要找出导致这一事件发生的原因,如船舶公司对培训质量把控不严,或是操作人员本身素质不高等。
这样一来,我们就可以将节点串起来,形成一个完整的故障树。
最后,我们需要对故障树进行定量分析,确定各节点之间的重要性和故障概率,从而为制定可靠性改进措施提供数据支持。
例如,我们可以通过贝叶斯网络方法,将已经观测到的数据纳入统计分析,不断优化故障树结构,提高船舶舱室系统的可靠性。
总之,通过基于故障树法的船舶舱室人因可靠性研究,我们可以深入分析船舶舱室系统的各个方面,找出导致故障的最根本原因,并制定对应的改进措施。
这对于保障船舶航行的安全性和可靠性具有重要的意义。
为了更具体地分析船舶舱室人因可靠性问题,我们可以列出一些相关的数据,并进行分析。
下面是一些可能的数据及其分析方法:1. 船舶舱室事故的类型分布:通过分析历史事故数据,我们可以发现船舶舱室事故的类型一般可以分为撞船、火灾、爆炸、闪漏、人员伤亡等类型。
对于不同类型的事故,我们需要分别分析其根本原因,以制定相应的预防和应急措施。
模糊故障树可靠性分析在三峡船闸的应用研究
记 系 统 对 于模 糊 功能 子 集
的模 糊 可靠 度
为 茛( ) 简 记 为 衷。其 中 , 表 示 所要 讨 论 的某
一
效 方 法 之一 。传统 的故 障树 分析 方 法 是基 于 概率
论 和 布 尔 代 数 理 论 , 要 故 障树 顶 事 件 和 底 事 件 需
模糊 功 能子 集 。 设 用 表 示 经典 可靠 性 定义 假
常规 可 靠 度 ; ( ,为 尺, 于 , A 尺 ) 对 的隶 属 度 。
.
系 统 ( 产 品 ) 作 到 某 时 刻 t 在 单 位 时 间 或 工 , 内发 生 某 类 模 糊 故 障 的概 率 , 为 系统 的模 糊 故 称 障 率 , a i,表 示 , 记 为 。 系统 或单 元 的无 用 ( ) 简 若 故 障时 间 分布 服从 指 数 分 布 , 得 则
中 的“ 完成 其 规 定 功 能 ” 一 明 确 事 件 , 这 用 (一
1 2 … , 分 别 表 示 各 个 模 糊 功 能 子集 所 代表 的 , , ) 模 糊 事 件 , 模 糊 可 靠 度 应 为 P( ) 符 号 △ 则 △ ,
Байду номын сангаас
发 生 的精 确 概 率 值 , 而 这 在 实 际 系统 中是 很 困 然
息 , 讨 应 用 模 糊 数 学 集合 理 论 对 系 统 进 行 基 于 故 障 率 为 模 糊 数 的 故 障 计 算 分 析 , 过 计 算 结 果 分 析 , 明 该 探 通 证 方 法 可 以 应 用 于五 级 船 闸监 控 系统 的 可 靠 性 分 析 , 具 有 推 广 应 用 价 值 。 并
式 中 , .A) P( 1 表示 出 现 的条件 下 出现 的概 率 。定 义 隶 属 函数 A为模 糊 条件 概 率 , A( 令 )
基于故障树分析的海上风力发电偏航系统可靠性研究

基于故障树分析的海上风力发电偏航系统可靠性研究海上风力发电是一种可再生的清洁能源,具有巨大的潜力和优势。
然而,由于海上环境的严酷条件,海上风力发电设备的可靠性问题成为一个关键的研究领域。
其中,偏航系统的可靠性是影响海上风力发电机组的重要因素之一。
本文将基于故障树分析的方法,对海上风力发电偏航系统的可靠性进行深入研究。
首先,本文将介绍故障树分析的基本原理和方法。
故障树分析是一种系统化的故障分析方法,通过将系统故障的发生情况进行逻辑推演,得到导致系统故障的基本事件和顶事件。
在本研究中,我们将利用故障树分析的方法,分析偏航系统的故障模式和可靠性指标。
接下来,我们将详细描述海上风力发电偏航系统的组成和工作原理。
偏航系统是风力发电机组的核心控制系统之一,通过控制风轮转向,使发电机组始终朝向风的方向,以最大限度地捕捉风能。
然而,由于海上环境的复杂性和恶劣性,偏航系统面临着诸如风大浪急、腐蚀腐蚀、冰雪覆盖等多种影响其可靠性的因素。
在研究中,我们将基于故障树的思路和方法,提出偏航系统的故障模型。
首先,我们将列出偏航系统可能发生的故障事件,如传感器故障、执行机构故障等。
然后,我们将通过分析这些故障事件之间的逻辑关系,构建故障树模型。
在故障树中,我们将通过与其他关键组件的逻辑关系,确定导致偏航系统故障的最小故障组合,即顶事件。
通过故障树分析,我们可以评估偏航系统的可靠性水平。
我们将引入故障树分析的定量评估方法,如顶事件的概率计算、重要度量化等。
通过这些指标的计算和分析,我们可以得到偏航系统的重要失效模式以及其对整个风力发电机组可靠性的影响。
此外,在研究中我们还将考虑偏航系统的可靠性改进措施。
根据故障树分析的结果,我们可以对偏航系统中的关键组件进行优化设计,提高其可靠性。
例如,通过使用更高精度的传感器、增加备用执行机构等方式,可以有效减少故障事件的发生和影响。
最后,我们将对研究结果进行总结和讨论。
通过故障树分析,我们可以全面了解偏航系统的可靠性特点和影响因素。
基于故障树的飞机故障诊断专家系统关键技术研究

基于故障树的飞机故障诊断专家系统关键技术研究摘要:为解决民航客机系统结构复杂、故障诊断分析困难的问题,采用故障树分析法设计实现了故障诊断专家系统。
本文以空客320型飞机反推为例,首先说明了其结构和工作原理,然后介绍了知识库设计和推理机的算法设计。
系统在Visual Basic6.0、Access2013环境下开发,经过验证,推理结果符合实际情况,有较强的应用价值。
关键词:飞机反推故障树分析专家系统1 引言民航客机系统结构复杂,设备出现故障时原因较多。
在现场判断和处理故障时,不但维修人员的经验丰富与否影响工作进度的快慢,而且对系统原理的分析也耗费相当多的时间,导致故障原因定位不准、维修时间较长。
故采用故障树分析法建立故障诊断专家系统,以提高经济性和可靠性。
2 反推的结构及工作原理由图2可见,反推系统控制条件复杂,涉及部件多样。
3 专家系统组成系统结构如图3所示,其中知识库中存放故障规则,规则由故障树分析得到,故障树根据系统原理建立。
知识库管理模块用于对知识库中的规则进行添加、删除和修改等操作。
推理机模块是专家系统的核心,推理机采用正、反向推理和优先级控制策略求解问题;推理得到的中间信息存放在动态数据库中;用户利用人机接口通过对话的形式在系统推理时提出问题;系统最终给出诊断结果并提供维修建议。
4 知识库设计4.1 知识的获取知识的获取首先是从反推系统的故障现象入手,寻找导致故障现象发生的全部因素,再找到造成下一级事件发生的全部因素,一直定位到产生故障的部件或线路,再绘制出反映推理过程的故障树。
故障原因和现象间的关系并非一一对应,多数情况下故障现象类似,但起因并不相同或不止一处。
由于存在这种一果多因、一因多果的情况,所以有些事件会出现在多个故障树中。
4.2 知识的表示方法知识分为部件知识和规则知识。
部件知识是为了方便规则知识的自动推理而设计的,同时也存储了部件自身的一些信息。
例如:LRU(14ks1,inhibition relay,抑制继电器,001,stat(正常,故障))表示fin号为14ks1的一个继电器,内容包含了中、英文名称、关联的原理图号、允许的状态集合等信息,而lru(14ks1,,,,故障)就表示该部件故障;wire(14ks1((a)),4101ks1(a(4)))表示了连接两个插钉的一条线路。
基于故障树的船舶机电系统的可靠性评估
第17卷 第9期 中 国 水 运 Vol.17 No.9 2017年 9月 China Water Transport September 2017收稿日期:2017-05-20作者简介:欧文武(1977-),男,湖南炎陵人,海南海警第二支队46106舰工程师。
基于故障树的船舶机电系统的可靠性评估欧文武(海南海警第二支队46106舰,海南 三亚 572000)摘 要:船舶在航行的过程中,机电系统安全性直接关系到船舶的航行安全。
在对船舶机电系统可靠性进行评估时,传统的评估方法由于自身的缺陷,导致在对船舶机电系统可靠性进行评估时存在很多问题。
目前,故障树模型可靠性综合评估方法引起了人们的重视。
在船舶机电系统可靠性评估中,通过建立故障树评估模型,能够更好地对船舶机电系统进行可靠性评估。
关键词:故障树;船舶机电系统;可靠性评估中图分类号:U665 文献标识码:A 文章编号:1006-7973(2017)09-0120-03随着现代科学技术的快速发展,高新技术层出不穷,并在船舶中得到了广泛的应用。
在现代科学技术的推动下,船舶机电系统发生了明显的变化,其性能也越来越先进,并在船舶中发挥着越来越重要的作用。
近年来,一些企业在收购船舶的过程中,将船舶的可靠性作为重要指标,这使得很多船舶制造部门对机电系统的可靠性也越来越重视。
从这一方面看加强对船舶机电系统可靠性研究具有十分重要的实际意义和实践价值。
对于船舶来说,机电系统是保障船舶安全运行的关键环节和保障,并且船舶机电系统是否可靠,直接关系着船舶能否顺利的完成任务,并和每一位船员的安全息息相关。
因此,在对船舶机电系统进行可靠性评估时必须选择科学的方法,避免因为船舶机电系统故障带来的损失。
由于船舶本身具有复杂性的特点,使船舶机电系统的可靠性评估也会发生变化。
一、船舶机电系统分析在对船舶机电系统的可靠性进行分析时,一套合适的可靠性的审核方法对于保障系统的可靠性评价指标是非常重要的,在一般情况下,对于厂家新研制出来的产品在定型之前,建立一套合适的方案对可靠性进行分析是十分必要的。
基于模型和故障树的飞机故障诊断方法
第17卷第20期2017年7月 1671—1815(2017)020-0308-06科学技术与工程Science Technology and EngineeringVol. 17 No.20 Jul. 2017©2017 Sci.Tech.Engrg.基于模型和故障树的飞机故障诊断方法王雪飞1李青“冯力2(北京航空航天大学1,北京100089;成都飞机设计研究所2,成都610031)摘要针对飞机外场排故的实际需求,提出了基于模型和故障树的故障诊断方法,其原理是,根据外场模块化排故的特点 和飞机设计知识,建立以LRU(外场可更换单元)为对象的飞机物理模型(基于LRU的筒化飞机系统模型),描述针对特定功 能的系统结构、行为和功能,再针对LRU建立故障事件,根据LRU之间的连接关系分析故障事件之间的逻辑关系,建立故障 的传播路径,通过树的合成算法,生成系统故障树模型。
在故障诊断时,通过物理模型和故障树的相互配合进行故障诊断,基 本思想是,将物理模型作为故障观察窗口,比较系统在正常情况下的预期行为和实际行为之间的差异,判断故障事件是否发 生,利用故障树的逻辑关系进行推理,再将推理过程在物理模型上进行直观展示,模拟LRU之间的故障传播,确定疑似故障 件。
基于上述方法,利用Dorado平台和G2开发系统开发了基于模型和故障树的飞机外场故障诊断系统,并结合某型号飞机 的刹车系统对该故障诊断方法进行了验证。
关键词飞机 故障诊断 模型 故障树中图法分类号V267; 文献标志码A随着航空业的发展,飞机的科技含量和集成化程度越来越高,对维修保障的依赖性也越来越多大。
机载设备的大量增加导致飞机系统的复杂 程度和部件之间的耦合度不断升高,影响系统运 行的因素骤增,出现的故障模式也越来越多,故障 原因和故障征兆之间的逻辑关系复杂,飞机故障 诊断愈发困难。
对于复杂的系统,单一的故障诊断方法具有局 限性,可靠性低,多种故障诊断方法相互融合、取长 补短成为航空故障诊断领域一个重要的研究方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无 人潜 航器 的整个 系统 按照 控 制 的时序 大致 可分 为数 据 的采样 输 入部 分 、 据 的处理 和协 调部 分 、 数 数据 输 出控 制部 分 。虽然 不 同 的无 人 潜航 器系 统有 着 不尽 相 同的 设计和 功 能 ,但 整个 系统 大致 包含 以 下 几个 部分 _:控制 系 统 、能源 系统 、导航 与制 导 系统 、通信 系统 、推 进操 纵 系统 、应 急系 统 。系统 框 4 l
底 事件 、 中 间事件 和逻 辑 门组 成 。对 于所 建 的 故障树 要 作如 下 假设 :( )研 究的元 、部件 和系 统只 能 1
取正 常和 故 障两种 状 态 ;( )元 、部件 的 故障是 独 立 的; ( )不存在 外 界干扰 。 2 3
22 UUv 系 统 的 故 障 树 分析 .
基 于故 障树 的无 人 潜 航 器 可靠 性 研 究
边信黔 ,牟春 晖 ,严 浙平 ,程相 勤
( 哈 尔滨工程 大学 自动化 学院 ,哈 尔滨 1 0 0 : 1 50 1
2 中国人 民解放 军 9 30部队 ,青 岛 2 6 0 23 6 0 0)
摘
要
在 武器装备领域 ,系统的可靠性 已成为重要 的评价指标 ,故障树分 析法则是 可靠性仿真中最有效 的分 析 方法之 一。首先对无人潜航器 ( uuV)进行 系统分 析,然后介 绍 了故障树 分析方法,并对该 系统建 立 了以无 人潜航器试验不 能完成为顶事件 的故障树 。采用计算机 辅助故障树分 析方 法对该 故障树 进行可靠性仿真,仿 真结果求 出 了 删 V 系统的平均故障 间隔 时间 、各基本部件 的概 率重要度 和模 式重要度 ,并 得出 了其 可靠度
算 。它研究 造成 系统 失效这 一事件 的各种直接 和 间接 原 因,并在 这些 事件 之 间建立 逻辑 关系 。 因而 这 种 方法 在系 统 的设 计和 生产 阶段可 以帮助寻 找潜在 事故 ,在 系统 的使 用和 维护 阶段 可 以帮助进 行失 效
诊 断 ,为改进 系统设 计提供 定量依 据 。 J 21 UUV 系统 故 障 树 的建 立 . 利用 故障树 分析 系统 的可靠 性 时 ,故 障树 的建造 是关 键 ,其完 善与 否直接 影 响定性 、定 量分 析 的
传统 的 故障树 分析 方法 包 括定 性分 析和 定量 分 析[。 6 】
收稿 日期 :2 l. 50 ;修 改稿 收稿 日期 :2 1 - 62 0 O0 .7 0 00 -4
中
国
造
船
学 术论文
架如 图 l 示 。 所
通讯系统
f 发射和接收命令、 数据1
控制系统
f 务的协调与控 任 制)
导航、制导系统
孺百而v 6
完成避碰功能)
1 无 人 潜 航 器 系 统 分 析
UUV系 统故 障来 源 是多 方面 的 ,但 主要 有 三个 方面 :设备 失效 ,环 境干扰 和 设计错 误 。设备 失效 是 uu 系统 硬 件故 障 的主要 来源 。 V 本文 主要 研 究 UU 系 统 的设备 失效 故 障 , V 它通 过个 别设 备 的失效 , 导致整 个 系统不 可靠 。
无人潜航器
应急系统
( 紧急情况时强制
u v浮出水面l u
能源系统
( uv 为u 提供行机构 的运 行1
图 1 无人 潜 航 器 系 统 框 图
2 UUV系 统 的故 障树 分 析
故障树 分析 法 ( T F A)作 为一 种系 统可靠 性分 析 方法 ,既 便于 进行 定性 分析 ,也 可 以进行 定量 计
直方 图、失效分布直方 图和 失效 密度 直方 图,与理论吻合 。
关 键 词 :船舶、舰船工程;可靠性;计算机仿真;故障树;无人潜航器 中 图 分 类 号 :U 7 , 1 T 22 64 4 ; P 0 9 文献标 识 码 :A
0 引 言
无人 潜 航 器是 新 一代无 人 航 行器 ,将 成 为完 成 各种 水 下任 务 的重要 工 具 ,例 如铺 设管 线 、海底 考
结 果 。 2是结合 故障症 状 , 定 以 I Ⅳ 试 验任务 不 能正常完 成为顶 事件 建造 的故障树 , 由项事 件 、 图 选 兀 它
图 2 无 人 潜 航 器 故 障树 图
5 卷 第 l期 ( 第 14期 ) 2 总 9
边信 黔 , : 于故 障树 的无 人潜 航器 可靠 性研 究 等 基
察 、数 据 收集 、钻 井 支援 、海 底 施工 、水 下设 备维 护 与维 修 、海上 侦 察 与搜索 、水 下搜索 与 调查 、反
潜 作战 等 。为 了科 学地 评 价 该系统 ,无 人潜 航器 的系 统 研究和 可 靠性 结合 就显 得极 为迫 切[。目前 ,在 “ 复杂 系统 可靠 性 分析 中,普遍 采用 的方 法 是故 障树 分析 引 ,它通 过对 可 能造成 系统 失效 的各 种 因素 进行 分 析 ,画 出故 障树 ,计算 系统 的平均 故 障 间隔 时 间 、系 统 失效 率及 其 他可靠 性 参数 。通 过 可靠 性 仿真 不仅 可 以求 解 系统 对 可靠 性 的 点估计 值 ,还 可 以在 运行 过程 中观察 系 统 内各 部 分 的可 靠性 所产 生 的 作用 ,并 获得 系统 内部 更多 的 可靠 性信 息 ,这对 改进 系 统或 重新 设计 系统 均有 指导 意义 。
5 2卷
第 1期 ( 总第 1 4期 ) 9
中
国
造
船
V l 2 No 1 ( e il 1 4 o 5 . S ra No 9 )
M a. 01 r2 1
21 年 3月 01
S I U I D I G H I A H PB L N OF C N
文 章 编 号 : 10 -8 2 (0 )0 —0 10 0 04 8 2 1 1 1 7 —9 0