天津大学研究生《运动控制系统》期末考试试卷及答案(自动化学院)
天津大学22春“机械设计制造及其自动化”《机电传动控制》期末考试高频考点版(带答案)试卷号:5

天津大学22春“机械设计制造及其自动化”《机电传动控制》期末考试高频考点版(带答案)一.综合考核(共50题)1.三相异步电动机变频调速时,()。
A.Tmax是常数B.Sm是常数C.n₀是常数参考答案:A2.当晶闸管承受反向阳极电压时,不论门极加何种极性触发电压,管子都将工作在()。
A.导通状态B.关断状态C.饱和状态D.不定参考答案:B3.电力传动系统稳定运行的充分必要条件是()。
A.T=TLB.T=TL,且机械特性下斜C.机械特性下斜D.机械特性上翘参考答案:C4.在按钮操作的电控线路中,必须加设“零压保护”。
()A.正确B.错误参考答案:B延时闭合的动合触点是:()A.B.C.D.参考答案:B6.交流电器的线圈能否串联使用?()A.能B.不能参考答案:B7.通电延时时间继电器,它的动作情况是()。
A.线圈通电时触点延时动作,断电时触点瞬时动作B.线圈通电时触点瞬时动作,断电时触点延时动作C.线圈通电时触点不动作,断电时触点瞬时动作D.线圈通电时触点不动作,断电时触点延时动作参考答案:A8.线绕式异步电动机采用转子串电阻启动时,所串电阻愈大,启动转矩()。
A.愈大B.愈小C.不一定(可大可小)9.热继电器是一种利用()进行工作的保护电器。
A.电流的热效应原理B.监测导体发热的原理C.监测线圈温度D.测量红外线参考答案:A10.一台直流电动机一般采用降压或电枢电路串电阻启动,目的是()。
A.减小启动载荷B.减小启动电流C.增大启动电流D.加快启动过程参考答案:B11.带电阻性负载的单相半波可控整流电路中,晶闸管承受的最大正向电压为(),最大反向电压为()。
A.B.C.D.参考答案:C12.有一台三相异步电机的PN=50kW,UN=380V,cosφN=0.85,则此电动机的额定电流为()。
A.182.11AB.89.37AC.105AD.110A13.控制回路中,线圈不得串联使用。
()A.正确B.错误参考答案:A14.与机械式行程开关相比较,电子式接近开关的突出优点()。
《运动控制系统》(A)卷及答案

《运动控制系统》(A)卷及答案网络教育学院2022年级(秋季)期末考试试卷2021-2021学年第二学期课程名称:运动控制系统(a)专业:姓名:学号:学习中心:题号一二三四五六七八九十合计题分一、简述下列问题(每题10分)1.在速度和电流双闭环调速系统中,需要调整哪些参数来改变电机的速度?2.哪些因素造成逻辑无环流系统要比配合控制的有环流系统的切换过程长?3.在电压频率协调控制方面,同步电机和异步电机在调速方面有什么不同?武汉理工大学网络教育学院试卷4.伺服系统的给定误差和干扰误差与哪些因素有关?二、采用电压空间矢量pwm控制方法,若直流电压ud恒定,如何协调输输出电压和输出频率之间的关系?(15分)三、分析比较按转子磁链定向和按定子磁链定向异步电动机动态数学模输入,指出它们的相同点和不同点。
(15分)运动控制系统(a)卷四、本文从气隙磁链和转子磁链两个方面讨论了同步电动机的矢量控制系统的工作原理,并与异步电动机矢量控制系统作比较。
(15分)武汉理工大学网络教育学院试卷五、试比较矢量控制系统和直接转矩控制系统的特点和性能。
(15分)运动控制系统(a)音量运动控制系统试卷(a)答案一、简短回答问题1、答:若调节电动机转速,应改变给定电压?,u*n,不能改变kn,ks。
2.A:影响因素有:逻辑切换条件判断、闭锁延时时间、分闸延时时间。
3、答:同步电机存在失步问题,可以根据转子位置直接控制变压变频装置换相时刻,进行自控变频调速。
4.A:给定的误差与系统的开环增益K和前向信道中积分链路的总数P+Q有关,而干扰误差仅与增益K1和干扰作用点之前积分链路的数目P有关。
二、答:有效的方法是插入零向量,使有效工作向量的工作时间仅为?t1??t,其余的时间?t0??t??t1用零矢量来补。
则有? s(k)???s(k)?美国(k)?t1?ud?t1在直流电压ud不变的条件下,要保持?s(k)恒定,只要使?t1为常数即可。
天津大学《测控专业英语》2023-2024学年第一学期期末试卷

站名: 年级专业: 姓名: 学号:凡年级专业、姓名、学号错写、漏写或字迹不清者,成绩按零分记。
…………………………密………………………………封………………………………线…………………………天津大学《测控专业英语》2023-2024学年第一学期期末试卷1、—Do you know our town at all?—Surely, this is the third time I ________ here.A .cameB .comeC .have comeD .am coming2、Frank studied _____English language in London for four years, so he gets ____ good knowledge of London. A .a; the B ./ ; /C ./ ; aD .the; a3、Personally speaking, ________the grand blueprint into reality is a long process. A .turning B .turn C .turned D .having turned4、Peter survived in the accident when he fell overboard yesterday. He _______ escaped drowning. A .nearly B .slightly C .narrowly D .hardly5、After I left _______ Linchuan No.2 Middle School, I began college classes in _______ September 2010. A .a; the B .不填; the C .the; the D .不填;不填6、—Listening to language recording in bed seems like an easy way to _______ some new vocabulary.—But does this learning method actually work? A .polish up B .make upC .pick upD .build up7、If you leave this application form and go to another website, you will lose ______ you havealready filled out on this form. A .whatever B .whoever C .wherever D .whenever8、If you ___________ to my advice carefully, you wouldn’t have made such a terrible mistake. A .listenedB .have listenedC .would listenD .had listened9、Much to my ______, my vocabulary has expanded a great deal. A .delighting B .delighted C .delight10、The man ________ the fake news that 18 firefighters lost their lives in the explosion was arrested.A .having circulatingB .to circulateC .circulatingD .to have circulated第二部分 阅读理解(满分20分)阅读下列短文,从每题所给的A 、B 、C 、D 四个选项中,选出最佳选项。
天津大学研究生《运动控制系统》期末考试试卷及答案(2007年自动化学院)

课程名称:运动控制系统课程编号:S203G008 (A卷)学院名称:专业名称:班学号:姓名:课程名称:运动控制系统 课程编号:S203G008 (A 卷) 学院名称: 专业名称: 班 学号: 姓名:五、试比较矢量控制系统和直接转矩控制系统的特点和性能。
(15分) 四、 论述同步电动机按气隙磁链定向和按转子磁链定向矢量控制系统的工作原理,并与异步电动机矢量控制系统作比较。
(15分) 定义mt 坐标系,使m 轴与气隙磁场合成矢量重合,t 轴与m 轴正交,再将定子三相电流合成矢量i s 沿m,t 轴分解为励磁分量i sm 和转矩分量i st ,同样将励磁电流矢量I f 分解成i fm 和i ft ,按气隙磁链定向后,得到同步电动机电磁转矩T e 表达式:T e=st gm p i n ϕ ,则只有保证气隙磁链gm ϕ恒定控制定子电流的转矩分量i st ,就可以方便地控制电磁转矩,将同步电动机等效成直流电动机进行控制。
定义d,q 坐标系,使d 轴与转子磁链矢量重合,d 轴与q 轴正交,在基频以下恒转矩工作区中,令定子电流矢量落在q 轴上,即i sd =0;i sq =i s ,再按转子磁链定向后得到电磁转矩方程:T e =sf fmd p i L Ln ϕ由于f ϕ恒定,电磁转矩与定子电流的幅值成正比,控制定子电流幅值就能很好的控制电磁转矩和直流电动机完全一样。
相同:基本原理与异步电动机相似,都是通过坐标变换转换成直流电动机,再按直流电动机的控制方法进行控制。
不同:同步电动机的主磁链由转子的励磁电流和定子的励磁电流分量共同产生,异步电动机的主磁链由定子的励磁分量产生,同步电机需由转子位置检测器检测出r θ角,才能准确地按气隙磁链定向,而异步电动机直接由转速ω定向。
不够快较快转矩动态响应比较宽 不够宽 调速范围 按转子磁链定向需知道定子磁链矢量的位置,但无须定向磁链定向旋转坐标变换,较复杂 静止坐标变换,较简单 坐标变换 闭环控制 无闭环控制 电流控制 连续控制,比较平滑双位式控制,有转矩脉动转矩控制 转子磁链闭环控制, 间接定向时是开环 控制定子磁链闭环控制磁链控制矢量控制系统 直接转矩控制系统 性能与特点。
《运动控制系统》综合复习题及答案.docx
一、单项选择题1.只能实现有级调速调速方式为(C )2.调速系统的静差率指标,应以(D )3.某直流调速系统电动机额定转速nN=1430r/min,额定速降A n N=115r/min,当要求静差率sW30%时,允许的调速范围是(C )4.对自动调速系统来说,主要的扰动量是(B )5.如果要改变双闭环无静差V-M系统的转速,可调节(C )6.转速电流双闭环调速系统在稳态工作点上时,控制电压不取决于(D)7.不是跟随性能指标是(D )8.在转速电流双闭环调速系统中,选用了典型I型系统,是因为电流环(A )9.两组晶闸管装置反并联的可逆V-M系统在一定控制角下稳定工作时出现的环流叫做(A )10.在配合无环流可逆系统中,可采用配合控制的触发移相方法对其进行控制,但需将两组晶闸管装置的触发脉冲的初始相位都整定在(C )11.在两组晶闸管反并联的可逆V-M系统中,当正组的控制角小于反组的逆变角时,将会产生(B )12.交-直-交PWM变压变频器中,逆变器起作用是(A )13.当交流电动机由常规的六拍阶梯波逆变器供电时,磁链轨迹是一个(A )14.不是异步电动机动态数学模型的特点为(B )15.不是直接转矩控制的特点为(A )16.采用旋转编码器的数字测速方法不包括(D )17.交流电动机带恒转矩负载作调压调速时,其转差功率与转差率(A )18.在低频输出时采用异步调制方式,高频输出时切换到同步调制方式为(D )19.不是异步电动机动态数学模型的特点。
(D )20.电流跟踪PWM控制时,当环宽选得较大时(A )21.只能实现有级调速调速方式为(C )22.调速系统的静差率指标,应以(D )23.某直流调速系统电动机额定转速n N=1430r/min,额定速降A n N=115r/min,当要求静差率sW30%时,允许的调速范围是(C )24.对自动调速系统来说,主要的扰动量是(B )25.如果要改变双闭环无静差V-M系统的转速,可调节(C )26.转速电流双闭环调速系统在稳态工作点上时,控制电压不取决于(B )27.不是跟随性能指标是(D )28.在转速电流双闭环调速系统中,选用了典型I型系统,是因为电流环(A )29.两组晶闸管装置反并联的可逆V-M系统在一定控制角下稳定工作时出现的环流叫做(A )30.在配合无环流可逆系统中,可采用配合控制的触发移相方法对其进行控制,但需将两组晶闸管装置的触发脉冲的初始相位都整定在(C )31.不适合使用矢量控制方式是(B )32.PMW变压变频器,通过它可同时调节电压和频率,其可控的是(B )。
运动控制试题库

第一章 闭环控制的直流调速系统第一节 可控直流电源—电动机系统——暨直流驱动单元1.对于要求在一定范围内无级平滑调速的系统来说,以( )的方式为最好。
改变( )只能有级调速;减弱( )虽然能够平滑调速,但调速范围不大,往往只是配合( )方案,在基速(即电机额定转速)以上作小范围的弱磁升速。
因此,自动控制的直流调速系统往往以 ( )为主。
2.调压调速是直流调速系统的主要方法,而调节( )电压需要有专门向电动机供电的( )电源。
3.常用的可控直流电源有以下三种:( )——用交流电动机和直流发电机组成机组,以获得可调的直流电压。
( )——用静止式的可控整流器,以获得可调的直流电压。
( )——用恒定直流电源或不控整流电源供电,利用电力电子开关器件斩波或进行脉宽调制,以产生可变的平均电压。
4.简称为G-M 的系统,具有( )的功能,国际上通称( )系统。
5.晶闸管-电动机调速系统(简称 ),图中VT 是( ),通过调节触发装置 GT 的( ) 来移动( ),即可改变整流电压U do ,从而实现平滑调速。
6.用触发脉冲的( )控制整流电压的平均值U d0是晶闸管整流器的特点。
U d0与触发脉冲( )的关系因( )的形式而异。
7.在V-M 系统中,脉动电流会产生( ),对生产机械不利,同时也增加( )。
为了避免或减轻这种影响,须采用抑制电流脉动的措施,主要是:设置平波电抗器;增加整流电路相数;采用多重化技术。
8.平波电抗器的计算单相桥式全控整流电路=L ( )三相半波整流电路=L ( )三相桥式整流电路=L ( )9.晶闸管触发与整流装置动态结构:考虑到 T s 很小,可忽略高次项,则传递函数便近似成一阶惯性环节;=)(s W S脉冲宽度调制(PWM )变换器的作用是:用PWM 调制的方法,把( )的直流电源电压调制成整流电路单相全波 三相半波 三相全波 六相半波 U m22U * 22U 26U 22U m2 3 6 6 U d0αcos 9.02U αcos 17.12U αcos 34.22U αcos 35.12U整流电路形式 最大失控时间 T smax (ms ) 平均失控时间 T s (ms ) 单相半波 单相桥式(全波) 三相半波 三相桥式、六相半波 20 10 6.67 3.33 10 5 3.33 1.67( )一定、( )一定、( )可变的脉冲电压系列,从而可以改变平均输出电压的大小,以调节电动机转速。
精品解析:北京市海淀区2023-2024学年七年级下学期期末道德与法治试题(原卷版).docx
北京市海淀区2023-2024学年七年级下学期期末道德与法治试题学校班级姓名考生须知1.本试卷共8页,共两部分,20道题.清分100分.考试时间60分钟.2.在试卷和答题纸上准确货写学校名称、班级名称、姓名.3.答案一律填涂或书写在答题纸上,在试卷上作答无效.4.在答题纸上,选择题用2B忸第作答,其余题用黑色字迹签字笔作答.S∙考试期间,独立作答,不得相互借阅教材.6.考试结束,请将本诚卷和答题纸一并交回.第一部分本部分共15题,每题3分,共45分.在每题列出的四个选项中,选出会符合题目要求的一项.1.亚里士多往说:“思维自疑问和惊奇开始,“在学习和生活中,有一些“爱问啪同学乐于提出问题,他们身上的共同点有()①不接纳他人意见.否定他人②独立思考,敢于表达Hl来③时任何事情都有不同的看法④善于发现何超,敢于质疑A.(D@B.(D<g) C ②④ D.③®2.在第28届中国青年五四奖章获奖者中,有的潜心科研、精益求精:有的扎根荒漠、拥抱乡土:有的探源中华文明、谱写文化自信……获奖代衣将走进学校、社区、农村等基层一战,面向青年宣讲交流,发挥榜样作用、弘扬奋斗精神.这说明< )①音在短哲,要学会享受美好生活②我们可以完全或制榜样的成功之路③汲取榜样力量.倪进国家和社会发展④春春由磨砺出彩.人生因奋斗而升华A.①@B.φ<g>C.②④D.颌Jl3. “宁可肌肉在深夜里燃烧,不让情绪在失败中沉沦。
哪吒,就是要脱胎换件:3后,一定是蝶变之后。
探索运动的帙限.收割育春的金牌,冠军是胜者,更是逆境中崛起的人这是感动中国2023年度人物张雨邓的班奖词。
受父用影响,张雨霏从小就开始游泳,经过不懈的努力,终于成为中国城优秀的游泳运动员之一,这总示我们()①规划青春之路,坚定埋患伯念②不惧困难挫折,青存桑梦飞翔③不做平凡小田,立志为国担当④宜面矛盾心理,培养批判精神c.(2x3)B.(D@4.近年来,我国重大科技成果^出,年轻的天津大学“海燕”研发团队在马里亚纳海沟刷新卜潜深度10619米的世界纪录:-95"后作为核心技术的干,为中国量子计算原型机“九章”研制成功贡献智慧. 这启示我们()①年轻人都拥有改变世界的创造能力②创造要敢于打破常规.追求另类独特③要做一个对国家和社会有用的创造者④青春要枳极开发创造潜力,剧越自我A①2) B.①@C.②φ D.③©$.女生小更和男生小彬都爱好文学,羟常一起讨论感兴趣的话跑,有时相约一起游玩.班上的同学议论纷纷,下列给他们的建议中,合理的是< )A.走自己的路,让同学们说去吧!B.弁性交往要内心坦荡、举止得体C异性间朦胧的情感是宵存期正常现象D.慎重对待、理性处理.和对方果断绝交6.我们有时在社会生活中会听到类似这样声音:—左边邻居家的哥哥大学选择了护理专业,好奇怪!——右边邻居家的那个妞妞竟然是消防救援队的一员!从上述对话中可以看Hl ( >A.人们对性别的认识遹常会受到性别刻板印象的影响B.男生女生在工作上越来越多地表现出各自性别优势C.性别差异是与生俱来的.我们应平静而欣然地接受D.只有不厮学习对方的优势.才能让自己变得更优秀7.下列情境与观点解读不一致的是()A. A BB C. C DD8.近年来,各大而校的“学朝宿舍”风曝网络平台,“同宿舍3人都成院士”、“全员保研”……媒体纷纷总结“学帝宿舍”养成秘籍,这秘籍可能是()①相互关怀,同伴之间没有竞争②相互督促,提升学习效率③怖定目标.让优秀成共同习惯④发展个性,保持特立独行A.①@B.φφC.(gXg)D.领)9.费国,是人世间呆深层、最持久的情感,是一个人的立德之源、立功之本。
运动控制系统习题答案2015.12

运动控制系统习题答案第一章1. 运动控制划分为两大类:(1) 位置变化问题其特征是被控对象空间位置发生改变,我们称之为第一类运动控制问题。
(2) 周期式旋转速度变化问题由于某一类物理量(如温度、压力、流量、转矩等)而迫使电机转速随负载的变化而变化,以满足温度、压力、流量、转矩等恒定的目的。
我们把这类运动控制问题称为第二类运动控制问题。
2. 第一类运动控制问题1)一维运动一维运动形式分为两类:一是直线运动,二是旋转运动;此外,还可以是两类基本运动的复合。
2)二维运动把两个一维直线运动平台互相垂直搭接在一起,就组成了一个二维运动平台。
分为质点运动,复合运动,轮廓运动3)三维运动第一类为空间点对点的移动,可以是直线移动,也可以是旋转运动;第二类为复合移动,是在三个运动轴按照一定的复合比例所做的运动;第三类为空间轮廓线运动3. 运动控制系统的轴1) 运动轴通常,我们把一个定义在直线段上移动的物体或者按照预定旋转方向旋转的物体定义为运动轴。
轴一般分为两类:线性轴和旋转轴。
2) 线性轴线性轴的定义为:只有初始位置和结束位置,而且轴的当前实际位置一定是在其初始位与结束位之间。
3) 旋转轴一个周期式的旋转轴做圆周运动,其起始点是0°,完成一个循环之后,又重新回到0°。
这种情况也称为模轴。
4. 运动控制系统有以下部分构成:运动控制器、驱动执行器、运动反馈单元等。
运动控制器主要由三大要素构成:轨迹生成器、插补器与控制回路。
5. 运动控制系统:运动控制系统是一个控制某些机器位置、速度、力或者压力的系统。
例如,一套基于运动控制系统的电气机械系统是由运动控制器(系统的大脑)、驱动器(接收来自运动控制器的弱电指令信号,并且把相关指令信号变换成高电压/大电流的功率信号)、电机(其作用是把电能转换为机械能)、反馈装置(其作用是把受控信号反馈到运动控制器,运动控制器依据设定与反馈信号给出需要做出的调节量,直到系统达到期望的结果为止。
运动控制系统试卷A答案(最新整理)

运动控制系统试卷A答案(最新整理)《运动控制系统》课程试卷(A 卷)答案第1篇直流调速系统(60分)⼀、填空题(每空1分,共23分)1. 运动控制系统由电动机、功率放⼤与变换装置、控制器及相应的传感器等构成。
2. 转矩控制是运动控制的根本问题,磁链控制与转矩控制同样重要。
3. ⽣产机械常见的三种负载是恒转矩负载、恒功率负载和平⽅率负载。
4. 某直流调速系统电动机额定转速,额定速降,1430/min N n r =115/min N n r ?=当要求静差率时,允许的调速范围为5.3,若当要求静差率时,30%s ≤20%s ≤则调速范围为3.1,如果希望调速范围达到10,所能满⾜的静差率是44.6%。
5. 数字测速中,T 法测速适⽤于低速,M 法测速适⽤于⾼速。
6. ⽣产机械对调速系统转速控制的要求有调速、稳速和加减速三个⽅⾯。
7、直流电机调速的三种⽅法是:调压调速、串电阻调速和弱磁调速。
8、双闭环直流调速系统的起动过程分为电流上升阶段、恒流升速阶段和转速调节三个阶段。
9. 单闭环⽐例控制直流调速系统能够减少稳态速降的实质在于它的⾃动调节作⽤,在于它能随着负载的变化⽽相应的改变电枢电压,以补偿电枢回路电阻压降的变化。
⼆、选择题(每题1分,共5分)1、双闭环直流调速系统,ASR 、ACR 均采⽤PI 调节器,其中ACR 所起的作⽤为(D )。
A 、实现转速⽆静差B 、对负载变化起抗扰作⽤C 、输出限幅值决定电动机允许的最⼤电流D 、对电⽹电压波动起及时抗扰作⽤2、典型I 型系统与典型II 型系统相⽐,( C )。
A 、前者跟随性能和抗扰性能均优于后者B 、前者跟随性能和抗扰性能不如后者C 、前者跟随性能好,抗扰性能差D 、前者跟随性能差,抗扰性能好3、转速单闭环调速系统对下列哪些扰动⽆克服能⼒,( D )。
A 、电枢电阻B 、负载转矩C 、电⽹电压D 、速度反馈电位器4、下述调节器能消除被控制量稳态误差的为( C )。
2019-运动控制期末考试试卷-优秀word范文 (19页)

本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==运动控制期末考试试卷篇一:运动控制系统期末考试一.判断题(正确的打√,错误的打×,答案填在题号的前面)1. (√ )交 - 直 - 交电压型变频器采用电容滤波,输出交流电压波形是规则矩形波。
2. (× )变频调速效率高,调速范围大,但转速不能平滑调节,是有级调速。
3. (√ )有静差调速系统是依靠偏差进行调节的,而无静差调速系统则是依靠偏差对作用时间的积累进行调节的4. (× )电动机的机械特性愈硬,则静差度愈大,转速的相对稳定性就愈高。
5. (√ )转速负反馈调速系统能够有效抑制一切被包围在负反馈环内的扰动作用。
6. (√ )SPWM 即正弦脉宽调制波形,是指与正弦波等效的一系列等幅不等宽的矩形脉冲列。
7. (× )在一些交流供电的场合,可以采用斩波器来实现交流电动机的调压调速。
8. (×)转速负反馈单闭环无静差调速系统采用比例调节器。
9. (√ ) PWM 型变频器中的逆变器件采用高频、大功率的半控器件。
10. (√ )矢量变换控制的实质是利用数学变换把三相交流电动机的定子电流分解成两个分量,一个是用来产生旋转磁动势的励磁电流分量,一个是用来产生电磁转矩的转矩分量。
二.填空题1. 根据公式,交流异步电动机有三种调速方法:① _ _______ 调速、②________ 调速、③ ___ ___ 调速。
2. 在SPWM调制方式的逆变器中,只要改变,就可以调节逆变器输出交流电压的大小,只要改变,就可以改变逆变器输出交流电压的频率。
3. IGBT 全称为 _______________ ,GTO 全称为 _______________ , GTR 全称为 _______________ 。
4. 异步电动机的变频调速装置,其功能是将电网的交流电变换成的交流电,对交流电动机供电,实现交流无级调速。
运动控制系统期末考试试题
运动控制系统期末考试试题编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(运动控制系统期末考试试题)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为运动控制系统期末考试试题的全部内容。
运动控制系统一.填空题1。
运动控制系统的概念:以机械运动的驱动设备—电动机为控制对象,以控制器为核心,以电力电子功率变换器为驱动,在控制理论的指导下组成的电气传动自动控制系统。
2.直流调速系统常用的可控直流电源:(1)旋转变流机组(2)静止可控整流器(3)直流斩波器或脉宽调制变换器3.反馈控制规律:(1)比例控制的反馈控制系统是被调量有静差的控制系统;(2)反馈控制系统的作用是:抵抗扰动,服从给定;(3)系统的精度依赖于给定和反馈检测的精度。
4.比例积分控制的无静差直流调速系统。
5。
微机数字控制的两个特点:信号的离散化、数字化。
6.引入电流负反馈的目的:解决系统起动和堵转时电流过大的问题。
7。
典型I型系统在跟随性能上可以做到超调小,但抗扰性能差。
典型II型系统的超调量相对较大,但抗扰性能却比较好.8.无环流逻辑控制环节DLC工作的依据信号:(1)电流给定极性(转矩极性鉴别信号)(2)零电流检测(零电流检测信号)二.简答题1.旋转编码器的数字测速方法有哪几种?各自的特点是什么?答:(1)M法—脉冲直接计数方法.M法测速是记取一个采样周期内Tc旋转编码器发出的脉冲个数M1来算出转速的方法. 特点:在高速段分辨率强.(2)T 法—脉冲时间计数方法.T法测速是测出旋转编码器两个输出脉冲之间的间隔时间来计算转速的方法. 特点:在低速段分辨率强。
(3)M/T法—脉冲时间混合计数方法。
(完整版)天津大学测控电路期末试题及答案1
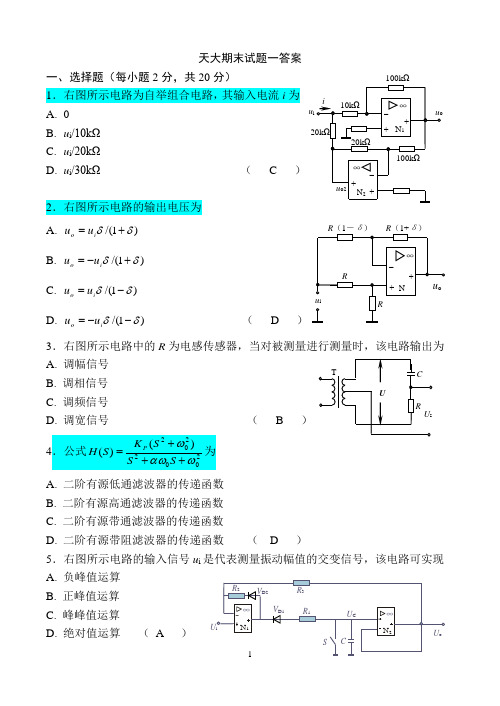
天大期末试题一答案一、选择题(每小题2分,共20分)1.右图所示电路为自举组合电路,其输入电流i为A.0B.u i/10kΩC.u i/20kΩD.u i/30kΩ ( C )2.右图所示电路的输出电压为A. )1/(δδ+=iouuB. )1/(δδ+-=iouuC. )1/(δδ-=iouuD. )1/(δδ--=iouu( D )3.右图所示电路中的R为电感传感器,当对被测量进行测量时,该电路输出为A. 调幅信号B. 调相信号C. 调频信号D. 调宽信号( B )A. 二阶有源低通滤波器的传递函数B. 二阶有源高通滤波器的传递函数C. 二阶有源带通滤波器的传递函数D. 二阶有源带阻滤波器的传递函数( D )5.右图所示电路的输入信号u i是代表测量振动幅值的交变信号,该电路可实现A. 负峰值运算B. 正峰值运算C. 峰峰值运算D. 绝对值运算(A )u iT6.一个10bit逐次逼近A/D转换器,其满量程电压为10V, 若模拟输入电压V1u,i其数字输出量的数值为A. 0001100101B. 0001100110C. 0001000110D. 0001010101 ( B )7.在相位跟踪细分电路中,相位基准A. 既是反馈环节,又是细分机构,分频数等于细分数B. 是反馈环节,但不是细分机构C. 是细分机构,且分频数等于细分数,但不是反馈环节D. 既是反馈环节,又是细分机构,细分数是分频数的2倍( A )8.右图是晶体管三相桥式逆变器,对其特点的叙述哪一个是不正确的ArrayA. 每一相上桥臂晶体管与下桥臂晶体管各导通1200B. 上、下桥臂晶体管导通状态互相间隔600C. 各相之间相位差为1200D. 换流只能在上下桥臂间进行( D )9.在PWM功率转换电路中,有制动工作状态和不可逆的意思是A. 电路不能提供电动机电枢的反相电流和反相电压B. 电路能提供电动机电枢的反相电流但不能提供反相电压C. 电路不能提供电动机电枢的反相电流但能提供反向电压D. 电路既能提供电动机电枢的反相电流又能提供反相电压( B )10.晶闸管的关断条件是A. 阳极接低电平,阴极接高电平B. 阳极与阴极之间的电流小于其维持电流C. 阳极接低电平,阴极也接低电平D. 与阳极和阴极电压无关,仅需门极电压接低电平( B )txOtOu cu sOt二、简答题(30分)1.什么是隔离放大电路?画图并简述光电耦合隔离放大电路的基本工作原理。
运动控制系统复习要点考试题目考题

电力拖动自动控制系统复习要点一期末考试的题型与交流拖动控制系统比较,直流拖动控制系统是重点;考试内容各占50%左右。
而直流的要求则是掌握,是以计算,分析,证明题方式出现;交流的要求是了解和一般掌握,交流则以选择、判断、填空、简述的方式出现。
二考试内容主要依据教材中的作业和例题和复习题。
考试题型及分数分配1 判断题(20分,10~20小题)范围广,2 选择题(20分,10~20小题)内容深,细节区分3 填空题(10分,10小题)4 设计题(10分,2小题)5 简述题(10分,2小题)6 无传感器算法:磁链、转矩的计算算法(10分)异步电动机转子磁链和定子磁链的估算、转矩的估算7 分析计算题(20分,3小题)三课程内容复习纲要直流拖动系统(掌握)控制系统课程贯穿着一个基本方法:理论联系实际来分析问题解决问题。
具体来说就是系统思想和模型化、工程化方法。
本书的基本结构是以学科历史发展过程或者说实际问题为逻辑起点,而一般的理论课程如物理、数学实际上是与科研实际过程相反的,以学习者的知识结构为逻辑起点,从定义、概念、定律再到定理。
这是因为理论的发展意味着概念的创新。
而控制系统是一门技术理论课程,它是从技术角度来总结的。
正因为是技术角度出发的,具有综合性和实践性的特点。
所以对学习者来说,必须具备一定的实践基础和专业理论基础。
而对初学者来说,表现出有一定的难度是不奇怪的,而且,每一部分内容都仅是打下基础,深入的细节方面的知识,需要更进一步地查阅其它书籍和资料,从另一方面来看,这也给大家留下了自学和实践的空间。
从电压平衡方程式,导出调速方法,从反馈控制原理和静态参数的要求导出闭环控制系统;从静态与动态性能的矛盾分析了P调节器和I 调节器,发展到PI调节器;从单闭环的调速系统无法控制起、制动动态电流,导出了带饱和非线性的PI调节器构成双闭环的系统结构,而双闭环的结构可以说交直流电动机控制的基本结构;从单向开关的晶闸管不能实现反转和回馈制动导出了可逆系统结构,又从可逆系统引起的环流问题导出有环流和无环流控制策略;再从调压调速的限制和宽调速范围的要求引出带弱磁控制的非独立弱磁控制系统。
运动控制期末大作业

成绩批阅教师日期《运动控制》期末作业姓名学号班级日期目录一、题目 (1)二、电路系统框图以及电路方案设计的思路 (1)三、各单元具体电路图,电路的工作原理,电路中主要元器件的作用及其参数的确定 (1)四、电气原理图以及整体电路的工作原理 (4)五、单片机程序流程图和清单以及程序说明 (5)一、题目设无刷直流电机的额定工作电压为12V ,功率为6W ,试设计一个 “两两换向” 桥式驱动控制电路,使电机能连续运转。
电机转子位置传感器采用光电元件,按120°角度布设,其他电路形式不限,作业具体要求如下: 1.画出电路的系统框图,说明电路方案设计的思路、理由或依据;2.分单元画出各单元具体的电路图,阐述电路的工作原理,介绍电路中主要元器件的作用及其参数的确定原则或依据;3.画出完整的电气原理图,介绍整体电路的工作原理,要讲清转子位置传感器的工作情况;4.如果采用了单片机,给出单片机程序的流程图和清单,说明程序的工作原理。
注:本题难度系数为1.2二、电路系统框图以及电路方案设计的思路电路系统框图:电路方案设计思路: 首先,通过对AT89C51单片机进行无刷电机控制程序的编写,通过单片机AT89C51的输出端口P0.0—P0.5对光电耦合器输出进行控制,从而控制三相桥式驱动控制电路的两两换相,最终,实现控制无刷电机的两两换相驱动,同时也通过传感器成120°角的排布,使得测量转子的位置,实现转速的测量。
三、各单元具体电路图,电路的工作原理,电路中主要元器件的作用及其参数的确定;单片机控制单元及其工作原理:AT89C51单片机主控制器无刷电机C 程序编程 光电耦合器 两两换向桥式驱动控制电路 无刷电机 发光二极管指示灯传感器转子位置检测装置单片机控制单元工作原理:单片机AT89C51对外来中断(即按钮信号,控制电机正反转的信号)进行处理,也即通过对下载至单片的十六进制文件的程序对中断的处理,从而实现单片机对脉宽的控制(P2.3口)、电机正反转信号给定的控制(P2.4—P2.5口)和对光电耦合器的控制(P0.0—P0.5口)。
完整版)运动控制系统试卷A答案

完整版)运动控制系统试卷A答案答:PI调节器的传递函数为Kp + Ki/s,其中Kp为比例增益,Ki为积分增益,s为Laplace 变换域中的复变量。
(1分)3、简述调压调速方法的原理。
(4分)答:调压调速方法的原理是通过改变电动机电枢电压来控制电动机转速。
当需要降低转速时,降低电动机电枢电压;当需要提高转速时,提高电动机电枢电压。
这种方法的优点是简单易行,但缺点是效率低,因为降低电压会导致电动机的效率下降。
(4分)4、简述生产机械对调速系统稳速的要求。
(4分)答:生产机械对调速系统稳速的要求是要求电动机在负载变化的情况下,能够保持稳定的转速。
这需要调速系统具有良好的抗扰性能和跟随性能,能够快速地响应负载变化并自动调节电动机的电压或电流,以维持恒定的转速。
(4分)5、简述数字测速中T法测速和M法测速的适用范围。
(4分)答:T法测速适用于低速,M法测速适用于高速。
T法测速是通过测量电动机的电动势和电枢电流来计算转速,适用于转速较低的情况;M法测速是通过测量电动机的电磁转矩和电枢电流来计算转速,适用于转速较高的情况。
(4分)答:起动开始时ACR输出增加是为了加大电流,提高转矩,加速电机起动;ACR输出减小是为了避免电流过大,保护电机。
(2分)2、起动过程中,ASR输出如何变化?(1分)答:起动过程中,ASR输出保持不变。
(1分)3、起动过程中,转速反馈信号如何变化?(1分)答:起动过程中,转速反馈信号为零,因为电机还未达到稳态转速。
(1分)4、起动过程中,电流反馈信号如何变化?(1分)答:起动过程中,电流反馈信号随着电机电流变化而变化,逐渐接近目标电流。
(1分)1.异步电机的动态数学模型由磁链方程、电压方程、转矩方程和运动方程构成,无论是三相静止坐标系、两相静止坐标系,还是两相旋转坐标系下都是如此。
2.单项选择题:1) 异步电动机变压变频调速系统属于转差功率不变型。
2) 异步机机机械特性是一条直线的调速方法是r=常数。
运控c答案

《运动控制系统》期末试题c 答案一. 填空(24)1. 变电压调速,弱磁调速;恒压频比调速,电气串级调速,基频以上变频调速,机械串级调速 。
2. 最低速 ;最低速。
3. 平均电磁转矩和负载转矩相平衡的状态下机械特性为平均转速和平均转矩的关系。
4. 在sm s ωω≤的范围内,转矩e T 基本上和s ω成正比,条件是气隙磁通不变,在不同的定子电流值时,按照.1.)(s s I f U ω=的函数关系控制定子电压和频率,就能保持气隙磁通m φ恒定。
5. 等腰三角形;改变调制度;正弦调制波的频率。
6. 坐标变换,相应的坐标反变换。
二. 简答题。
(26)(1) 试分析有环流可逆调速系统的制动过程? (5)答: 由βα=配合控制可逆调速系统仍采用双闭环控制,起整个制动过程可分为3个阶段:<1> 本组逆变阶段,这个阶段电流迅速下降占时间很短,转速来不及明显的变化。
<2>它组反接制动阶段,本阶段反向电流很快增长,电机处于反接制动转速明显下降。
<3>它组回馈制动阶段,电机在恒减速的条件下会馈制动把动能转换成电能,其中大部分通过VR 逆变回馈电网。
(2) 试说明什么是有静差调速系统和无静差调速系统?有静差调速存在静差的根本原因和无静差系统能实现无静差的根据? (5)答:只采用比例调节器的单闭环系统为有静差调速系统,采用比例积分调节器的闭环调速系统为无静差调速系统。
有静差调速系统存在静差的根本原因是由于比例调节器的输出和输入是比例关系,而调速系统的输入又为给定速度和反馈速度之差。
若无速度差则输出为零速度很快下将又出现静差。
而无静差系统采用比例积分环节其输出不仅和当前的速度差有关系还和过去的速度差的过渡历史有关,他的输出是过去速度差的积分,因此在当前输入为零的情况下可以保持输出恒定不变就有可能实现无静差。
(3) 试述电气串级调速系统的控制原理? (5)答: 控制原理:将电机转子电压先整流成直流电压,然后引入一个附加的直流电动势,控制次附加的电动势的幅值,就可以调节异步电动机的转速,这样把交流的变压变频问题转化成与频率无关的直流变压问题,使问题的分析和工程的实现方便。
运动控制考试复习题及答案(完整版)精品
运动控制考试复习题及答案(完整版)一、填空题1、控制系统的动态性能指标是指跟随指标和抗扰指标,而调速系统的动态指标通常以抗扰性能指标为主2、直流电机调速方法有变压调速、电枢串电阻调速和弱磁调速。
异步电动机调速方式常见有6种分别是:降压调速、差离合调速、转子串电阻调速、串级调速和双馈电动机调速、变级调速、变压变频调速。
其中转差率不变型有:变级调速、变压变频调速,只有变压变频应用最广,可以构成高动态性能的交流调速系统。
同步电动机按频率控制方式不同分为:他控式变频调速和自控式变频调速。
(变电阻调速:有级调速。
变转差率调速:无级调速。
调压调速:调节供电电压进行调速)按按转差功率可以怎么划分电动机:转差功率消耗型、转差功率不变型、转差功率馈送型3、对于异步电动机变压变频调速,在基频以下,希望维持气隙磁通不变,需按比例同时控制定子电压和定子频率,低频时还应当抬高电压以补偿阻抗压降,基频以下调速属于恒转矩调速;而基频以上,由于电压无法升高,只好仅提高定子频率而迫使磁通减弱,相当直流电动机弱磁升速情况,基频以上调速属于恒功率调速。
4、对于SPWM型逆变器,SPWM的含义为正弦波脉宽调制,以正弦波作为逆变器输出的期望波形,SPWM波调制时,调制波为频率和期望波相同的正弦波,载波为频率比期望波高得多的等腰三角波,SPWM型逆变器控制方式有同步调制、异步调制、混合调制。
SPWM型逆变器的输出的基波频率取决于正弦波。
SPWM控制技术包括单极性控制和双极性控制两种方式。
5、调速系统的稳定性能指标包括调速范围和静差率6、供变压调速使用的可控直流电源有:旋转交流机组(G-M系统)、静止式可控整流器(V-M系统)与直流斩波器(PWM-M系统)或脉宽调制变换器。
7、典型I型系统与典型II型系统相比,前者跟随性能好、超调小,但抗扰性能差。
典型I型系统和典型Ⅱ型系统在稳态误差和动态性能上有什么区别?答:稳态误差:对于典型I型系统,在阶跃输入下,稳态时是无差的;但在斜坡输入下则有恒值稳态误差,且与K值成反比;在加速度输入下稳态误差为∞。
天津大学期末试题合集及答案
学平衡常数 KC =(
)。
13 光化学中的量子效率φ 的定义(
)。
14 胶体分散系统的主要特点是(
)。
15 丁达尔现象产生的原因是入射光的波长(
)分散相粒子尺寸时发生光
的( )现象。
二 (29 分)
1
(20 分)气相反应 2A(g) + B(g) → C(g) 的速率方程为 − dpB dt
= kpA pB ,
物理化学期末考题(A) 2001-01-12
题号
1
2
3
4
5
6
7
总分
分数
一 概念题(30 分)
1
离子的极限摩尔电导率
Λ∞ 1 Ca2+
及
Λ∞ Br −
分别为
59.4×10-4与
78.4×10-4S·m2·mol-1,
2
则
Λ∞ CaBr2
=(
)S·m2·mol-1。
2 某电导池中充以 0.10mol·dm3的醋酸水溶液,25℃时测得其电阻为 703 Ω ,已 知该电导池的电导常数为 36.90m-1,则该醋酸溶液的电导率k=( )S·m-1,
摩尔电导率 Λm =( )S·m2·mol-1。
3 已知 25℃下,浓度b=0.20mol·kg-1 Al2(SO4)3的 r± =0.70,则 b± =( ),电解
质Al2(SO4)3的活度a =(
)。
4
电 池 反 应 Pb2+(
aPb2+
)+
SO42−
(
a2− SO42−
)
=
PbSO4
(g)所对应的原电池为
(
)(表示出所设计的电池)。
运动控制系统期末考试卷

D.系统的精度依赖于给定和反馈检测的精度
26.在微机数字控制系统的故障保护中断服务子程序中,工作程序正确的是C
A.显示故障原因并报警——分析判断故障——封锁PWM输出——系统复位B.显示故障原因并报警——封锁PWM输出——分析判断故障——系统复位C.封锁PWM输出——分析判断故障——显示故障原因并报警——系统复位D.分析判断故障——显示故障原因并报警——封锁PWM输出——系统复位
A.M法B.T法C.M/T法D.F法
21.转速电流双闭环调速系统中转速调节器的英文缩写是C
A.ACRB.AVRC.ASRD.ATR
22.下列关于转速反馈闭环调速系统反馈控制基本规律的叙述中,错误的是B
A.只用比例放大器的反馈控制系统,其被调量仍是有静差的
B.反馈控制系统可以抑制不被反馈环节包围的前向通道上的扰动
9.微机直流双闭环调速系统的转速和电流计算都是在相应的中断服务子程序中完成的。()
10.在无环流的可逆V-M系统中,两组晶闸管可以同时接受控制脉冲。()
三选择题
1.转速电流双闭环调速系统中的两个调速器通常采用的控制方式是B
A.PIDB.PIC.PD.PD
2.静差率和机械特性的硬度有关,当理想空载转速一定时,特性越硬,则静差率A
A.抗扰性B.稳定性C.快速性D.准确性
6.在定性的分析闭环系统性能时,截止频率ωc越低,则系统的稳定精度
A.越高B.越低C.不变D.不确定
7.常用的数字滤波方法不包括D
A.算术平均值滤波B.中值滤波C.中值平均滤波D.几何平均值滤波
8.转速电流双闭环调速系统中电流调节器的英文缩写是A
A.ACRB.AVR C.ASR D.ATR