飞思卡尔单片机原理
飞思卡尔单片机 ECT学习资料
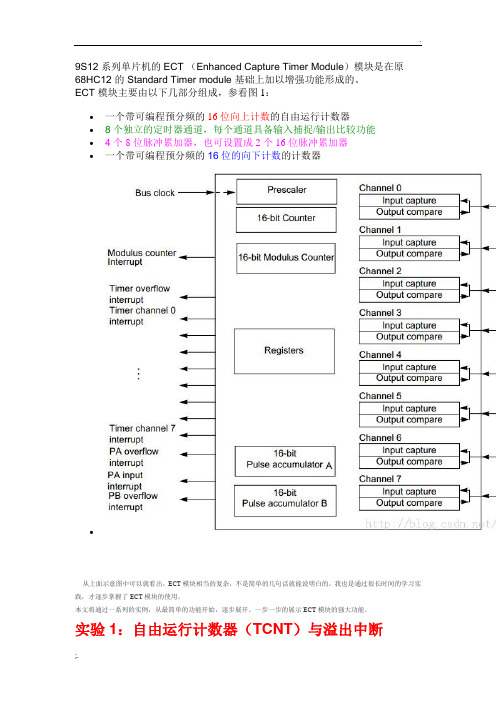
9S12 系列单片机的ECT (Enhanced Capture Timer Module)模块是在原68HC12 的 Standard Timer module 基础上加以增强功能形成的。
ECT 模块主要由以下几部分组成,参看图1:•一个带可编程预分频的16位向上计数的自由运行计数器•8个独立的定时器通道,每个通道具备输入捕捉/输出比较功能•4个8位脉冲累加器,也可设置成2个16位脉冲累加器•一个带可编程预分频的16位的向下计数的计数器•从上面示意图中可以就看出,ECT 模块相当的复杂,不是简单的几句话就能说明白的。
我也是通过很长时间的学习实践,才逐步掌握了ECT模块的使用。
本文将通过一系列的实例,从最简单的功能开始,逐步展开。
一步一步的展示ECT 模块的强大功能。
实验1:自由运行计数器(TCNT)与溢出中断自由运行计数器(TCNT)也称为自由运行主定时器,是一个16位的计数器,可以说是ECT的核心。
在系统复位时,这个自由运行计数器的初值为$0000。
当ECT 模块运行时,自由运行计数器从$0000~$FFFF 循环递增计数。
当计数器溢出复零时,会置位中断标志。
利用这个计数器,可以产生一个周期的中断信号。
TCNT 的输入时钟也是可以选择的,图2 给出了TCNT 的时钟源的示意图。
可以看出,TCNT的输入时钟可以来源于总线时钟、总线时钟经过预分频、外部引脚输入的脉冲、外部引脚输入脉冲经过脉冲累加器分频这四种选择。
当然,选择哪个时钟源其实就是在程序中设置一下相应的寄存器这么简单。
了解了上面的介绍,就可以开始本文的第一个例子了,这个例子非常简单,将BUS CLOCK 分频后作为TCNT 的输入时钟,使能TCNT 溢出中断。
在开始代码之前,还需要介绍几个程序中用到的寄存器。
TCNT寄存器(Timer Count Register)这个寄存器其实已经介绍过了,它是一个16 位的只读寄存器。
在每个时钟输入下计数值会自动加1,当计数值为0xFFFF 后下一个时钟脉冲会使计数器溢出为0x0000。
飞思卡尔单片机 第1节-CPU寄存器

CPU寄存器
CPU寄存器
累加器 (A) 累加器A是一个通用8位寄存器。经常用于暂存一个输入到算 术逻辑单元(ALU)的操作数,并且用于存放(ALU)的计算结果。 复位对累加器A的内容没有影响。 索引寄存器(H:X) 这个16位寄存器实际上分为两个8位寄存器(H和X),它们作为 一个16位的地址指针一起工作,H存放一个地址的高位字节 和X存放地址的低位字节。所有索引寻址模式指令利用H:X中 全部16位值作为一个索引参考指针;然后,为了与早先 M68HC05家族兼容,一些指令只在低8位(X)中运行,并且H在 复位过程中强制为0x00。复位对X的内容没有影响。
HCS08 CPU的特点包括:
▪目标代码完全向上兼容M68HC05和M68HC08家族 ▪所有寄存器和存储器映射在单块64 Kbyte地址空间 ▪16位堆栈指针SP(64 Kbyte地址空间中的任意大小堆栈) ▪16位索引寄存器(H:X)的强大的寻址索引模式 ▪多种寻址模式 ▪8位累加器(A) ▪支持存储器到存储器的数据传送 ▪高效的位操作指令 ▪快速的8位乘8位和16位除以 8位指令 ▪STOP和WAIT指令唤醒低功耗运行状态
条件代码寄存器(CCR) 条件代码寄存器 8位条件代码寄存器存放中断屏蔽位(I)和5个指出刚执行指令 结果的标志。第5和第6位永远设置为1。如图:
I 位是中断屏蔽控制位,与其他位不同的是它在CCR 中不是处 理器状况位。在CCR的六个可执行位中,I 位也是复位后唯一可 被初始化的位。I 位复位后置为1,这使得中断被屏蔽直到堆栈 指针被初始化。其他五个状态位(V、H、N、Z 和C)在复位后是 未知的,只有在执行一个指令后才能知道。复位后无须强制这 些位为特定的值,因为直到执行了一个影响它们的指令后,与 这些位相关的条件转移才有意义。 这五个状态位标志了运算和其他指令的结果。条件转移指令 根据CCR 内状态位的值来决定是直接转移到一个新的程序地址, 还是继续执行下一个指令。简单的条件转移指令(BCC、BCS、 BNE、BEQ、BHCC、BHCS、BMC、BMS、BPL 和BMI)所导 致的转移取决于单一的CCR 位状态,而其他转移指令则被两三 个更复杂的CCR 位控制。例如,若布尔表达式[(Z) | (N⊕V)]真, 则将产生小于等于转移(BLE).
飞思卡尔ZigBee射频芯片MC13192的原理与应用

飞思卡尔ZigBee射频芯片MC13192的原理与应用ZigBee技术是一种低速率无线传输技术,它基于IEEE802.15.4标准,工作频率为868MHz、915MHz或2.4GHz,其中2.4GHz是一个开放的频率。
该技术的突出特点是应用简单、电池寿命长、组网能力强、可靠性高以及成本低。
与已经在市场上推广了很多年的蓝牙技术相比,ZigBee技术的传输速率要低一些(ZigBee的峰值速率为250kbps,蓝牙的峰值速率为750kbps),但ZigBee的待机功耗比蓝牙要低1到2个数量级(ZigBee为3~40μA,蓝牙为200μA)。
由于以上的优点,ZigBee技术在低成本、低速率、低功耗的无线传输方面有很大的发展前景,例如在工业或企业市场,需要感应式网路,提供感应辨识、灯光与安全控制等功能;而在未来的网络家庭中,像空调系统的温度控制器,灯光、窗帘的自动控制,老人与行动不便者的紧急呼叫器,电视与音响的万用遥控器,烟雾侦测器等这些应用,都非常需要和适合采用这种低成本、低速率、低功耗的无线传输技术。
MC13192是飞思卡尔公司提供的符合IEEE 802.15.4标准的带数据调制解调器的射频收发芯片。
该芯片性能稳定,功耗很低,采用经济高效的CMOS设计,几乎不需要外部组件。
更重要的是,该芯片和飞思卡尔其他的ZigBee产品组合在一起可以搭建成飞思卡尔ZigBee-Ready平台,利用该平台进行ZigBee相关方面的开发工作可以有效地缩短工程师的开发时间,降低开发成本。
主要特点MC13192符合IEEE 802.15.4标准,它选择的工作频率是2.405~2.480GHz,数据传输速率为250kbps,采用O-QPSK调试方式。
这种功能丰富的双向2.4GHz 收发器带有一个数据调制解调器,可以在ZigBee技术应用中使用,它还具有一个优化的数字核心,有助于降低MCU处理功率,缩短执行周期。
内部集成4个定时比较器,使其可以和性能较低、价格低廉的MCU配合使用以降低成本,广泛的中断维修服务使得MCU编程更为容易;芯片和MCU之间使用串行外围接口,使得在MCU选择上具有更大的余地。
飞思卡尔 PWM机理【转】
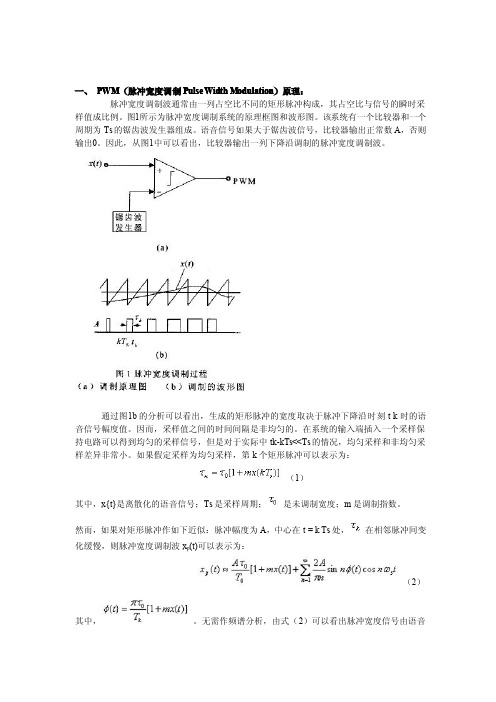
Width Modulation)原理:PulseWidth一、PWM(脉冲宽度调制Pulse脉冲宽度调制波通常由一列占空比不同的矩形脉冲构成,其占空比与信号的瞬时采样值成比例。
图1所示为脉冲宽度调制系统的原理框图和波形图。
该系统有一个比较器和一个周期为Ts的锯齿波发生器组成。
语音信号如果大于锯齿波信号,比较器输出正常数A,否则输出0。
因此,从图1中可以看出,比较器输出一列下降沿调制的脉冲宽度调制波。
通过图1b的分析可以看出,生成的矩形脉冲的宽度取决于脉冲下降沿时刻t k时的语音信号幅度值。
因而,采样值之间的时间间隔是非均匀的。
在系统的输入端插入一个采样保持电路可以得到均匀的采样信号,但是对于实际中tk-kTs<<Ts的情况,均匀采样和非均匀采样差异非常小。
如果假定采样为均匀采样,第k个矩形脉冲可以表示为:(1)其中,x{t}是离散化的语音信号;Ts是采样周期;是未调制宽度;m是调制指数。
然而,如果对矩形脉冲作如下近似:脉冲幅度为A,中心在t=k Ts处,在相邻脉冲间变化缓慢,则脉冲宽度调制波x p(t)可以表示为:(2)其中,。
无需作频谱分析,由式(2)可以看出脉冲宽度信号由语音信号x(t)加上一个直流成分以及相位调制波构成。
当时,相位调制部分引起的信号交迭可以忽略,因此,脉冲宽度调制波可以直接通过低通滤波器进行解调。
二、数字脉冲宽度调制器的实现:实现数字脉冲宽度调制器的基本思想参看图2。
图中,在时钟脉冲的作用下,循环计数器的5位输出逐次增大。
5位数字调制信号用一个寄存器来控制,不断于循环计数器的输出进行比较,当调制信号大于循环计数器的输出时,比较器输出高电平,否则输出低电平。
循环计数器循环一个周期后,向寄存器发出一个使能信号EN,寄存器送入下一组数据。
在每一个计数器计数周期,由于输入的调制信号的大小不同,比较器输出端输出的高电平个数不一样,因而产生出占空比不同的脉冲宽度调制波。
图3为了使矩形脉冲的中心近似在t=kTs处,计数器所产生的数字码不是由小到大或由大到小顺序变化,而是将数据分成偶数序列和奇数序列,在一个计数周期,偶数序列由小变大,直到最大值,然后变为对奇数序列计数,变化为由大到小。
飞思卡尔8位单片机—飞思卡尔8位单片机基础知识

7〉 管脚的复用
注意: 0、管脚功能复用时的优先 级见右表,高优先级接管管 脚时,对低优先级模块会产 生杂乱信号,因此切换前应 先停止不使用的功能。 1、PTA5作为只能输入管脚 而言,输入电压不能超过 VDD。 2、IIC使用的端口可以通过 设置SOPT2 寄存器中的 IICPS位重新定位到PTB6和 PTB7,复位时缺省使用 PTA2 and PTA3。 3、如果ACMP和ADC被同 时使能,管脚PTA0和PTA1 可同时使用。
管脚及其功能
6〉 管脚控制寄存器
位于高页面的管脚控制寄存器,可以独立设置每个管 脚的输出驱动强度、输出信号变化速度、输入脚的内部 上拉允许等。内部上拉的设置有些时候自动失效,比如 管脚设为输出、管脚被外设使用、管脚作为模拟电路使 用等。如果管脚被用于键盘中断KBI模块,,并设置上升 沿触发,则允许上拉时实际是配置了下拉电阻。 对输出管脚设置了输出变化速度控制后,可以减少 EMC辐射,变化速度控制对输入脚无效。 输出管脚的输出驱动强度控制,可以选择更大的驱 动电流,虽然每个输出管脚都可以设置成大电流驱动, 但总电流不能超出芯片的工作范围。同时大驱动电流对 EMC辐射也会有一定影响。
• EPROM
EPROM(Erasable Programmable ROM,可擦除可编 程ROM)芯片可重复擦除和写入,。EPROM芯片在其正 面的陶瓷封装上,开有一个玻璃窗口,透过该窗口,可以 看到其内部的集成电路, 紫外线透过该孔照射内部芯片 就可以擦除其内的数据,完成芯片擦除的操作要用到 EPROM擦除器。EPROM内资料的写入要用专用的编程 器,并且往芯片中写 内容时必须要加一定的编程电压( VPP=12—24V,随不同的芯片型号而定)。EPROM的型 号是以27开头的,如27C020(8*256K)是一片 2M Bits容 量的EPROM芯片。EPROM芯片在写入资料后,还要以 不透光的贴纸或胶布把窗口封住,以免受到周围的紫外线 照射而使资料受损
飞思卡尔单片机第9章.

单片机原理与嵌入式系统实践
Page 8
输入捕捉初始化
1. 清空通道中断标志 2. 设置通道的状态和控制寄存器 3. 清空定时器模块溢出中断标志 4. 设置定时器模块的状态和控制寄存器,并
启动定时器计数
单片机原理与嵌入式系统实践
Page 9
输入捕捉初始化程序
InitTPM()
(void)(TPM1C2SC == 0); /* 读通道0控制与状态寄存器,进入输入捕捉中断标 志清空序列 */
单片机原理与嵌入式系统实践
Page 3
基本结构
单片机原理与嵌入式系统实践
Page 4
TPM 通道n 状态和控制寄存器(TPMxCnSC)
包含通道中断状态标志和控制位用来 配置中断使能,通道配置和引脚功能
单片机原理与嵌入式系统实践
Page 5
通道标志位和中断使能位
CHnF:通道n 标志。
当通道n 为输入捕捉通道时,通道n 上的有效边沿触发 该位置位。
单片机原理与嵌入式系统实践
Page 6
模式、边沿和电位选择
单片机原理与嵌入式系统实践
Page 7
TPM 通道值寄存器(TPMxCnVH : TPMxCnVL)
包含通过输入捕捉功能被捕获的TPM 计数器值 在输入捕捉模式下,在读(TPMxCnVH :
TPMxCnVL)任一字节过程中,寄存器两个字节 的内容将被锁存到缓冲器中,直至读取另外一个 字节。
单片机原理与嵌入式系统实践
Page 2
外部引脚
TPM 引脚与通用I/O 引脚复用。 当一个通道被配置为输入捕捉模式时,TPMxCHn
引脚被作为TPM 的边沿有效输入 基于总线时钟的同步器用于将输入边沿同步到总
经典:飞思卡尔8位单片机-第10章-IIC

(4)STOP信号
• 在SCL为逻辑1时SDA的一个上升沿 • 主器件做下面两件事情之一,数据传输中止:
(3)数据传输
• 数节为8位,高位在前,低位在后。每传输一位数据都有 一个时钟脉冲相对应。
• SCL线为低电平时,SDA线上数据就被停止传送。接收器可 向SCL线输出低电平而箝住SCL(SCL=0),迫使SDA线处于 等待状态,直到接收器准备好接收新的数据/地址字节时, 再释放时钟线SCL(SCL)=1),使SDA线上数据传输得以 继续进行。
8、当主机发送寻址字节时,总线上所有器件都将该寻址字节中的高7位地址 与自己器件的地址比较,若两者相同,则该器件认为被主机寻址,并根据 读/写位确定是从发送器还是从接收器
9、具有I2C总线接口的单片机可以工作在上述4种工作状态中的任一状态,而 一些带有I2C总线接口的存储器(RAM或E2PROM)模块只能充当被控发送器 或被控接收器
Hale Waihona Puke 时钟分频与数 据保持时间表
时钟分频设置举例
• 前提:总线时钟4MHz,IIC的时钟为100KHz;
配置:
MULT = 01,对应 mul = 2;
ICR = 0; 对应 SCL分频数=20; SDA保持值= 7;
则波特率
= 总线频率(Hz)/ (mul * SCL分频数)
=4000000/(2*20) =100K; (周期10uS)
IIC Clock Rate — 该ICR数值用来定义总线分频得到IIC时钟的分频因子, 同时该ICR数值也用来定义数据线SDA的数据保持时间;
飞思卡尔8位单片机MC9S08 15 08系列MCU编程器的开发.ppt

命令
格式
功能
READ $4A $4A 高字节 高字节 低字节 低字节 数据
读出指定单元内容(RAM或Flash)
WRITE IREAD
$49 $49 高字节 高字节 低字节 低字节 数据 数据 $1A $1A 数据 数据
向指定单元写数据(RAM)
读取上次访问的地址+1、+2处的 内容(RAM或Flash)
Start Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Bit7 Stop
16.1 编程器技术基础
(2)监控模式的工作过程
MCU在进入监控模式时,需要接收8字节的保密字节,如果是空白 芯片,则8字节的保密字节全是$FF,然后就处于等待接收一个命令字节 状态。以GP32为例,进入监控模式的时序如下图所示。
In PC 主机 Out
串 3 In 行 口 2 Out PC
MAX 7 232 9
8
10
1
3
2 MC
5
74HC125 6
特定I/O
目标 MCU
(a)编程器内部器件连接图
7
10
6
VDD
VDD 5 10KΩ
4
8
9
2
3
MAX 232
1 74HC125
(b)编程器原理图
16.2 HC08系列MCU编程器的实现方法
16.1 编程器技术基础
16.1.3 HC08系列MCU在监控模式下的工作过程
(1)与主机通信的数据格式
当MCU上电复位时,如果满足进入监控模式的条件,MCU就会工作 于监控模式。监控模式下MCU主要是通过某个特定的I/O口(如:GP32是 PTA0,JL3是PTB0),以标准不归零(NRZ)的数据格式进行数据通信, 具体为:第一位起始位(0),随后为8个数据位(低位在前,高位在后),最 后一位为停止位(1)。NRZ的数据格式如下图所示。
飞思卡尔8位单片机-第9章 SPI
1-SSOE
0-LSBFE
时钟模式
时钟模式
ss
SS的用法
MODFEN
0
SSOE
0
主机模式
通用 I/O (非SPI)
从机模式
从模式选择输入
0
1 1
1
0 1
通用 I/O (非SPI)
用于模式故障的 输入 自动 输出
从模式选择输入
从模式选择输入 从模式选择输入
对于Slave模式,SS管脚一定作为片选输入用; 对于Master模式,SS管脚是否被SPI控制,取决于MODFEN,当该位为“1” 表示SS被SPI使用,但其功能由SSOE决定,SSOE为“1”时,SS作为片选输 出;SSOE为“0”时SS作为总线冲突指示输入。 总线冲突检测功能: 当管脚 SS 作为总线冲突指示用时(此时MSTR = 1, MODFEN = 1且SSOE = 0).当 一个主器件的SS管脚变为低时,意味着还有其它Master器件试图将该主器件 作为Slave来控制,此时产生总线冲突事件, 标志位MODF被置“1”(读SPIS 然后写SPIC1清除该位),且被控制器件将更改模式为Slave(MSTR位被清 除),用户程序必须保证总线冲突解除才能重新恢复器件为主模式。
1. SPI总线系统的组成
• SPI总线系统典型结构示意图
图8-1 SPI外围扩展示意图
• 单片机与外围扩展器件在时钟线SCK、数据线MOSI 和MISO上都是同名端相连。带SPI接口的外围器件 都有片选端CS。
• 在扩展多个SPI外围器件时,单片机应分别通过I/O 口线来分时选通外围器件。
• 当SPI接口上有多个SPI接口的单片机时,应区别其 主从地位,在某一时刻只能由一个单片机为主器件。 • 图8-1中MCU(主)为主器件,MCU(从)为从器 件。
飞思卡尔单片机ppt讲解
单片机(中国)——微控制器MCU(国外)Micro Controller Unit
片上系统 SoC(System on Chip):提高可靠性、降低复杂性、减少硬件尺
寸、降低成本和功耗。
应用系统单片化:总有一款适合你!(几千种) 嵌入式系统ES( Embedded systems ):以应用为中心、以计算机技术
针孔摄像机有线或无线实时传输,可以边 拍边看。这些摄像头都是很小的,最小的 跟手表上装的那种纽扣电池差不多。
1.3 单1.1片计算机机历的分史类与及发新展 技术
单片机的发展
• 20世纪70年代,4位单片机问世 • 第一代(1976一1978年)探索阶段
Intel、Motorola • 第二代(I978一1982年)完善阶段
同时可以实现简单的调试功能,如显示和修改各内部寄存器、显 示和修改内存等。 * 通过PC串口和单片机的串口实现人机对话,可以使单片机的开发 不依赖于任何开发工具(51系列仿真芯片SST89E516) * 占用用户资源(串口、片内RAM和闪存) * 监控程序和应用程序共享一个CPU,因此不能做动态调试。
CPU的集成度已达到千万只晶体管,时钟频率高达GHz
1.3 单片机历史及新技术
计算机的发展动向
1.大型、巨型计算机
2.小型、微型计算机
中国国防科技大学2011年5月公布超级电脑“ 天河一号”,每秒运算速度逾千万亿次,使中国
成为继美国之后第二个能研制千万亿次超级电脑
的国家。该电脑一天的运算量相当于一台主流个 人电脑不间断地计算160年。这套重155吨的先进 系统,由103个冰箱大小的银灰色机柜组成,占地 面积约1000平方公尺。这台超级电脑耗资人民币6 亿元。
飞思卡尔8位单片机MC9S0802嵌入式应用技术硬件基础

主要内容 ❖ 数字电路基础知识 ❖ 嵌入式应用的常用元器件 ❖ 嵌入式应用技术的常用术语
1
2.1 数字电路基础知识
2.1.1 嵌入式应用中常用的数制及其转换
(1)单片机中常用的进制
任意数S,(基数为N)均可展开为:S=∑KiNi 其中Ki是第i位的系 数,它可能是0~N-1共N个数码中的任意一个。不同的数制基数N不 同,数字码不同。
C 3 5 A• F E
↓ ↓ ↓ ↓ ↓↓
1100 0011 0101 1010.1111 1110
即C35A.FEH=11010.1111111B。
4
十六进制与十进制相互转换
十六进制→十进制: 按展开式计算即可。 十进制→十六进制: 整数部分与小数部分分别转换。整数部分:除 以16取余数,先为低位后为高位。小数部分:乘以16取整数,先为高 位后为低位。
0010 1111 1011.1101 1101 1000
↓↓↓↓ ↓ ↓
2 F B. D D 8
即1011111011.110111011B=2FB.DD8H。
十六进制→二进制 : 将每1位十六进制数用4位二进制数取代,若最
前面或最后面有0则去之。例如,将十六进制数C35A.FE转为二进制数,
方法如下:
与门逻辑真值表
AB Z 00 0 01 0 10 0 11 1
或门逻辑真值表
AB Z 00 0 01 1 10 1 11 1
非门逻辑真值表
A
Z
01
10
11
A•B
其它基本逻辑门
①与非门:与非门逻辑功能是:只有所有输入为1时,输出才是0, 否则输出为1。其表达式为:Z=A ·B。
飞思卡尔单片机教学
串联方式(PE7引脚要拉低)
并联方式(PE7引脚要拉高)
a
29 29
第3章 MC9S12单片机的内核及片上资源
时钟初始化寄存器-共5个
(1)锁相环控制寄存器(PLLCTL)
时钟监控允许位 1=允许 0=禁止
锁相环电路允许位 1=允许 0=禁止
注:其余各位的描述见教材49页。
a
30 30
第3章 MC9S12单片机的内核及片上资源
注:其余各位的描述
见教材49页和50页。
a
32 32
第3章 MC9S12单片机的内核及片上资源
PLL例子
CLKSEL=0x00; //禁止PLL PLLCTL=0xe1; //PLL电路允许 SYNR=2;REFDV=1; //设置倍频参数 PLLCTL=0x60; //时钟监控禁止 while(0==(CRGFLG&0x08));//等待稳定 CLKSEL=0x80; //选择PLL作为时钟 //若晶振为16M,则PLLCLK=2*16*3/2=48MHz,则总线频率是
R/W:读写信号,指示总线上数据方向 LSTRB:总线模式下低位字节(奇地址)选通 ECLK:内部总线时钟输出,一般在宽扩展模式下地址锁存用 BKGD(MODC)、MODB、MODA:模式选择 NOACC/XCLKS:当前外部总线操作无效
a
55
第3章 MC9S12单片机的内核及片上资源
模式选择
a
66
Block3
$C000~$FF00 16K($3F) Block2 Block1 Block0
16KB
$30 $31 $32 $33 $34 $35 $36 $37 $38 $39 $3A $3B $3C $3D $3E $3F
飞思卡尔单片机
Void TPM1_Init(void) { TPM1SC=0x4B;//TPM1SC=01001110 TPM1MODL=0x12; TPM1MODH=0x7A;
}
例1:用定时器控制led 以2秒流动;同时让8个 led同时以1秒闪烁
例二:用TPM1 通道0 实现输出比较让led 按二进制减法熄灭
中央对齐PWM 模式
这类PWM 输出使用定时器计数器(CPWMS=1 )的向上/ 向 下计数模式。 TPMxCnVH:TPMxCnVL 中的输出比较值决定 PWM 信号的脉冲宽度(占空比)而TPMxMODH:TPMxMODL 中的值决定周期。 脉冲宽度 = 2 x (TPMxCnVH:TPMxCnVL ) 周期 = 2 x (TPMxMODH:TPMxMODL); TPMxMODH:TPMxMODL=0x0001-0x7FFF
一、MC9S08DZ60 I/O模块
1、 输入/输出端口简介
MC9S08DZ60系列内部有非常丰富的输 入/输出端口资源,同时也集成了多种功能 模块,其输入/输出引脚大多为复用引脚。 I/O口包括PTA、PTB、PTC、PTD、PTE 、PTF、PTG。这7 个端口总共包含53个输 入/ 输出管脚和1 个仅输入管脚。
边缘对齐PWM 模式
这类PWM 输出使用定时器计数器的正常向上计数模式 (CPWMS=0 );。 这个PWM 信号的周期由模数寄存器 (TPMxMODH:TPMxMODL)的值加1 确定。 占空比由定时 器通道寄存器(TPMxCnVH:TPMxCnVL )中的设置确定。 这个PWM 信号的极性由ELSnA控制位中的设置确定。 如果ELSnA=0,计数器溢出强迫PWM 信号进入高态;而输 出比较强制PWM 信号进入低态。
A口高电平
飞思卡尔单片机AD功能模块课件

加快AD转换速度
通过优化硬件设计和配置,例如选择更高转换速率的 ADC器件,或者在软件中实现并行处理和快速算法来加 快AD转换的速度。
提高电源稳定性
通过优化电源设计和供电方式,例如使用线性稳压器降低 电源电压的波动,或者在软件中实现电源监控和保护机制 来提高电源的稳定性。
06 未来展望与研究方向
AD功能模块的技术发展趋势
飞思卡尔单片机AD 功能模块课件
目录
• 飞思卡尔单片机简介 • AD功能模块概述 • 飞思卡尔单片机AD功能模块详解 • AD功能模块的应用实例 • AD功能模块常见问题与解决方案 • 未来展望与研究方向
01 飞思卡尔单片机简介
单片机的基本信息
定义
单片机是一种集成电路芯片,采用超大规模集成电路技术将 CPU、随机存储器、程序存储器、定时器/计数器、串行通信 接口等集成在一块芯片上,构成一个微型的计算机系统。
B
C
可靠性高
飞思卡尔单片机经过严格的质量控制和可靠 性测试,能够在恶劣的环境条件下稳定工作 。
开发工具丰富
飞思卡尔单片机提供了丰富的开发工具和软 件库,方便用户进行开发和调试。
D
飞思卡尔单片机的应用领域
智能仪表
飞思卡尔单片机广泛应 用于各种智能仪表,如 智能电表、智能水表等 。
工业控制
由于其高性能和可靠性 ,飞思卡尔单片机在工 业控制领域也有广泛的 应用。
AD转换器出现。
集成化
随着物联网和嵌入式系统的发展,对设备的功耗要求 也越来越高,未来将会有更低功耗的AD转换器出现。
AD功能模块的应用前景与挑战
应用前景
随着物联网和智能化的发展,AD功能模块的应用前景非常广泛,如智能家居、 智能仪表、医疗设备等领域都有广泛的应用。
飞思卡尔单片机中断(两篇)

引言概述飞思卡尔单片机中断是指在特定的条件下,单片机的运行被打断,转而执行特定的处理程序。
在飞思卡尔单片机的开发中,中断是非常重要的一部分,它可以提高系统的响应速度和实时性。
本文将详细介绍飞思卡尔单片机中断的相关知识。
正文内容一、中断的基本概念和原理1. 中断的定义:中断是指在特定的条件下,程序的执行被打断,转而执行事先定义好的处理程序。
2. 中断的分类:外部中断和内部中断。
外部中断是由外部设备引发的,例如按键、定时器等;内部中断是由单片机内部的某个事件引发的,例如指令执行完成、通信完成等。
3. 中断的触发方式:电平触发和边沿触发。
电平触发是指当外部信号保持一定电平时触发中断;边沿触发是指在信号的上升沿或下降沿触发中断。
二、飞思卡尔单片机中断的使用方法1. 中断的初始化:对中断控制寄存器进行设置,使能相应的中断源。
2. 中断的优先级设置:多个中断源同时触发时,可以通过设置优先级来确定执行顺序。
3. 中断服务程序的编写:根据不同的中断源,编写相应的中断服务程序,完成特定的处理。
4. 中断的开启和关闭:根据需要,可以在程序中开启或关闭特定的中断。
三、飞思卡尔单片机中断优化技巧1. 中断嵌套:可以在一个中断中触发另一个中断,提高系统的实时性和处理效率。
2. 临界区保护:在关键代码段加入关中断代码,保护临界区避免竞态条件的发生。
3. 中断延时处理:在某些特定情况下,需要延时处理中断,可以使用延时函数或软件延时方式实现。
四、飞思卡尔单片机中断的常见问题和解决方法1. 中断误触发问题:可能是由于外部干扰、软件错误等原因导致中断被误触发,可以通过加入滤波电路、改进软件设计等方式解决。
2. 中断处理时间过长问题:中断处理程序执行时间过长会导致系统响应变慢,可以通过优化中断程序、减少中断次数等方式解决。
3. 中断嵌套问题:如果中断嵌套层次太多,可能会导致系统死锁或无法预测的结果,可以通过合理设计中断嵌套层次、减少中断嵌套次数来解决。
飞思卡尔单片机教学课件

THANKS
具体实现方法:首先需要将LED灯连接到单片机的某个I/O端口上,然后在程序 中配置该I/O端口的输出模式,通过循环语句控制LED灯的亮灭状态,从而实现 LED闪烁的效果。
按键输入程序
按键输入程序是单片机编程中常见的应用之一,通过编实现方法:首先需要将按键连接到单片机的某个I/O端口 上,然后在程序中配置该I/O端口的输入模式,通过检测该 I/O端口的电平变化来判断按键是否被按下,从而实现按键输 入的功能。
随着物联网和嵌入式系统 的发展,对单片机的功耗 要求越来越高,低功耗设 计成为未来的重要趋势。
多核处理器
为了提高处理能力和效率, 单片机将向多核处理器方 向发展,实现更复杂的功 能和更高的性能。
无线连接
无线连接技术的发展,使 得单片机能够更好地与外 部设备进行通信和控制, 扩展了应用范围。
飞思卡尔单片机的未来
IAR Embedded Workbench: 另一款流行的单片机开发软件,
提供丰富的工具链。
MPLAB X IDE:适用于XC8和 XC16系列单片机的开发环境,
由Microchip公司出品。
03 飞思卡尔单片机编程实 践
LED闪烁程序
LED闪烁程序是单片机编程的基础实践之一,通过编写程序控制LED灯的亮灭, 可以帮助学生理解单片机的I/O端口操作和程序执行流程。
更高效的生产工艺
更智能的算法支持
随着半导体技术的不断发展,飞思卡 尔单片机的生产工艺将更加高效,性 能和集成度更高。
随着人工智能和机器学习技术的发展, 飞思卡尔单片机将集成更智能的算法, 实现更高级的功能和应用。
更丰富的外设接口
为了满足各种应用需求,飞思卡尔单 片机将提供更丰富的外设接口,如 USB、HDMI等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖(3)SCK – 时钟信号,由主设备产生
❖(4)SS – 从设备使能信号,由主设备控制
▪ 用于检测AD转换结束
定时器
❖MC9S12XS128中有增强型定时器模块( Enhanced Capture Timer Module)
❖1个16位自由运行计数器 ❖8个16位输入捕捉/输出比较通道 ❖1个16位脉冲累加器
定时器
定时器在智能车系统中的应用 ❖速度检测 ❖道路信息定时采样 ❖系统输出定时控制
❖ void ADCInit() ❖{ ❖ ATD0CTL2=0xC0; //AD模块上电, 快速清零, 无等待模
式, 禁止外部触发, 中断禁止 ❖ ATD0CTL3=0x20; // 每个序列4次转换, No FIFO, Freeze
模式下继续转换 ❖ ATD0CTL4=0x83; // 8位精度, 2个时钟,
SPI通信原理
❖ SPI的通信原理很简单,它以主从方式工作,这种 模式通常有一个主设备和一个或多个从设备,需 要至少4根线,事实上3根也可以(用于单向传输 时,也就是半双工方式)。也是所有基于SPI的设 备共有的,它们是MISO(数据输入),MOSI( 数据输出),SCK(时钟),SS(片选)。
❖(1)MOSI – 主设备数据输出,从设备数据输入
数据总线D0 WR_PORT
RD_DDR RD_PORT WR_DDR
通用I/O 口的应用
数据寄存器PORT
D
Q
G
Q
PORT引脚
D
Q
方向寄存器DDR
GQຫໍສະໝຸດ 通用I/O寄存器按键实例
VCC PORTA0 R1
S0
Void Main() {
int iKey=0; iKey=PORTA; }
外部中断控制寄存器
定时器例子
❖ void interrupt 15 C4I_ISR(void) //定时中断控制程序 {
unsigned int i; long int Avg_Dir=0; DisableInterrupts; TFLG1=0X80;//清中断标志 for(i=0;i<100;i++) {
Avg_Dir+=dir[i]; } Avg_Dir/=100; Last_A_Dir=A_Dir;//上次采样平均值 A_Dir=Avg_Dir; TC7=2000; EnableInterrupts;
❖}
SCI/SPI串行通信模块
❖SPI(Serial Peripheral interface)串行外围设备 接口是一个同步串行通信系统,即发送、 接收双方共享一个时钟信号,以确保数据 传输是同步的。SPI具有1个时钟信号、2个 数据信号和1个主从选择信号。SPI能用于 两个器件之间的点对点通信或通过SPI总线 的多点通信。
PWM波形
PWM模块结构和原理
PWM实例
❖ void pwminitial()
❖{
❖ PWMPOL=0X01;
//通道0输出波形开始极性为1 output
waveform which high first then low when the duty counter is reached
❖ PWMCAE=0x00; //左对齐输出模式
MC9S12XS128
❖Flash容量:128KB ❖RAM容量:12KB ❖CAN总线:1个 ❖SCI总线:2个 ❖SPI总线:1个 ❖A/D转换:8通道,8/10位 ❖定时器:8通道,16位 ❖I/O数量:91/59/44个(112/80/64引脚)
通用输入输出模块
❖ MC9S12XS128(80QFP封装)有通用I/O口59个 ,采用与功能模块的引脚复用模式,并通过寄存 器来选择。
}
A/D转换模块
❖MC9S12XS128内置1个16通道12位的逐次 逼近模数转换器
❖可选8/10/12位转换精度 ❖转换时间短 ❖可由外部触发控制 ❖可选择单次或连续转换
A/D转换实例
❖ #include <hidef.h> /* common defines and macros */ ❖ #include <mc9s12XS128.h> /* derivative information */
output left align waveform
❖ PWMCLK=0X01; //PWM时钟源为
SAClock SA is the clock source
for PWM channel 0
❖ PWMPRCLK=0X03; //时钟A8分频
Clock A is 8MHz/8=1MHz
❖ PWMSCLA=0X80; //时钟SA为1MHz/128/2 Clock SA is
ATDClock=[BusClock*0.5]/[PRS+1] ; PRS=3, divider=8 ❖ ATD0CTL5=0xA0; //右对齐无符号,单通道采样,通道0 ❖ ATD0DIEN=0x00; // 禁止数字输入 ❖}
A/D转换实例
❖ void main(void) { ❖ ADCInit(); //AD初始化 ❖ DDRB = 0xFF; ❖ PORTB = 0x00; ❖ EnableInterrupts; ❖ for(;;) { ❖ while(!ATD0STAT1_CCF0); //等待转换结束 ❖ PORTB = (byte)ATD0DR0; //在B口显示转换值 ❖ } /* wait forever */ ❖}
{ ISR6Function();
} #pragma CODE_SEG DEFAULT
void ISR6Function() { }
中断系统在智能车系统中的应用
❖定时中断
▪ 用来控制系统计时,速度检测,算法控制等
❖外部中断
▪ 用于处理无线控制信号等
❖输入捕捉中断
▪ 用于摄像头行场同步信号采集等
❖A/D转换终止中断
IRQE:IRQ边沿触发使能位 0:低电平触发 1:高电平触发
IRQEN:IRQ中断使能位 0:禁止 1:允许
中断程序示例
❖ Void main() { IRQCR = 0XC0;//设置为允许下降沿中断 EnableInterrupts; }
#pragma CODE_SEG NON_BANKED void interrupt 6 ISR(void)
❖I/O 口分为:
▪ • Port A, B 和 K 为通用 I/O ▪ • Port E 与IRQ, XIRQ 中断复用 ▪ • Port T 与1 个定时器模块复用 ▪ • Port S 与2 个SCI模块和1 个SPI 模块复用 ▪ • Port M 与1 个MSCAN模块复用 ▪ • Port P 连接至 PWM 模块另外可以作为外部中断源 ▪ • Port H 和 J 是通用I/O 也可以作为外部中断源 ▪ • Port AD 与 AD转换模块复用
单片机控制系统中的两个通路
❖能量通路
▪ 即能量的变换与传输通路。包括系统电源,摄 像头/光电管驱动电路,电机H桥驱动电路,舵 机驱动电路等等。
❖信号通路
▪ 即信号的变换与传输通路。包括道路信号采集 以及A/D变换,信号处理分析、电机控制PWM 输出、舵机控制PWM输出等等。
单片机在智能车中的应用
什么是单片机
❖什么是单片机?
▪ 单片机是一种集成在电路芯片,是采用超大规模 集成电路技术把具有数据处理能力的中央处理器 CPU、随机存储器RAM、只读存储器ROM、多种 I/O口和中断系统、定时器/计数器等功能(可能 还包括显示驱动电路、脉宽调制电路、模拟多路 转换器、A/D转换器等电路)集成到一块硅片上KHz
❖
❖ PWMPER0=255; //设定输出周期=通道时钟周期*256
❖ PWMDTY0=0;
//占空比初始为0
Duty is 50%,and
PWM waveform's frequent is 16
❖ PWME=0X01;
//通道0使能
enable pwm
channel 0
❖如何构建一个智能车的单片机控制系统?
▪ 道路识别 ▪ 速度检测 ▪ 数据分析计算 ▪ 电机驱动 ▪ 舵机驱动
智能车单片机系统基本结构
道路信息输入 (光电/摄像头/电磁)
速度信息输入 (速度编码器)
MCU(MC9SXS128)
直流电机
状态显示 转向舵机
设计中使用到的单片机模块
❖通用输入输出模块 ❖中断系统 ❖定时器 ❖输入捕捉模块 ❖A/D转换模块 ❖PWM发生模块 ❖SCI/SPI串行总线