GPS控制网等级分类
GPS控制点等级

G P S控制点等级Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998观测时段 observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
同步观测 simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
同步观测环 simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
独步观测环 independent observation loop由非同步观测获得的基线向量构成的闭合环。
数据剔除率 percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
天线高 antenna height观测时接收机相位中心至测站中心标志面的高度。
参考站 Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
流动站 roving station在参考站得一定范围内流动作业的接收机所设立的测站。
观测单元 observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
世界大地坐标系 1984(GPS84) World Geodetic System 1984由美国国防部在与WGS72相应的精密星历NSWC-9Z-2基础上,采用1980大地参考数和系统定向所建立的一种地心坐标系。
国际地球参考框架 ITRF YY,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
GPS控制网等级分类和规范标准

1 分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4级别 B C D、E单频/双频双频/全波长双频/全波长双频/单频观测量至少有L1、L2载波相位L1、L2载波相位L1载波相位同步观测机数≥4 ≥3 ≥2观测:表1.5级别级别B C D E卫星截止高度角/度10 15 15 15同时观测有效卫星数≥4 ≥4 ≥4 ≥4有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
GPS控制点等级要点

3.1观测时段observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3.2同步观测simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
3.3同步观测环simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
3.4独步观测环independent observation loop由非同步观测获得的基线向量构成的闭合环。
3.5数据剔除率percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
3.6天线高antenna height观测时接收机相位中心至测站中心标志面的高度。
3.7参考站Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8流动站roving station在参考站得一定范围内流动作业的接收机所设立的测站。
3.9观测单元observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3.10世界大地坐标系1984(GPS84)World Geodetic System1984由美国国防部在与WGS72相应的精密星历NSWC-9Z-2基础上,采用1980大地参考数和BIH1980.0系统定向所建立的一种地心坐标系。
3.11国际地球参考框架ITRF YY,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
3.12GPS静态定位测量static GPS positioning通过在多个测站上进行若干个时段同步观测,确定测站之间相对位置的GPS定位测量。
GPS控制网等级

GPS控制网等级1、控制网等级及其用途按照国家标准《全球定位系统(GPS)测量规范》(GB/T13814-2009),GPS测量按其精度分为A、B、C、D、E五级。
其中:1)A级GPS网由卫星定位连续运行基站构成,用于建立国家一等大地控制网,进行全球性的地球动力学研究、地壳变形测量和卫星精密定轨测量。
2)B级GPS测量主要用于建立国家二等大地控制网,建立地方或者城市坐标基准框架、区域性的地球动力学研究、地壳变形测量和各种精密工程测量等。
3)C级GPS测量用于建立三等大地控制网,以及区域、城市及工程测量的基本控制网等。
4)D级GPS测量用于建立四等大地控制网。
5)E级GPS测量用于测图、施工等控制测量。
2、精度要求3、卫星定位连续运行基准站网的布设1)布设原则CORS依据管理形式、任务要求和应用范围,划分为国家基准站网、区域基准站网和专业应用站网。
(1)国家基准站网国家基准站网的布设应顾及社会发展、经济建设和自然条件因素。
在即将实施的国家大地基准基础设施建设项目中,我国将在全国范围内建设360个地基稳定、分布均匀的连续运行基准站(其中:新建150个、改造60个、直接利用已有的站150个)。
(2)区域基准站网区域基准站网是指在省、市地区建立的连续运行基准站网,主要构成高精度、连续运行的区域坐标基准框架,为省、市区域提供不同精度的位置服务和相关信息服务。
区域基准站网的布设按实时定位精度而选择基准站间的距离,当采用网络RTK技术满足厘米级实时定位,其区域基准站布设间距不应超过80KM。
(3)专业应用站网专业应用站网是由专业部门或者机构根据专业需求建立的基准网站,用于开展专业信息服务。
它的布设间距主要根据专业需求,当满足实时定位分米级要求,则基准站布设间距一般在100~150KM之间。
2)基准站设计与选址基准站设计时应根据基准站网布设原则,在图上标出设计基准站站址,同时标明基准站及其周围地区的主要地质构造、地震活动,与设计有关的地震台、人卫站,以及可以利用的GPS、大地测量网站点。
GPS测量分级
GB/T 18314-2001规定GPs测量按其精度划分为AA,A,B,C,D,E级GP S 快速静态定位测量可用于C,D,E级GPS控制网的布设各级GPS测量的用途:AA 级主要用于全球性的地球动力学研究、地壳形变测量和精密定轨A级主要用于区域性的地球动力学研究和地壳形变测量;B级主要用于局部形变监测和各种精密工程测量;C级主要用于大、中城市及工程测量的基本控制网;D,E级主要用于中、小城市、城镇及测图、地籍、土地信息、房产、物探、勘测、建筑施工等的控制AA,A级可作为建立地心参考框架的基础。
AA,A,B级可作为建立国家空问大地测量控制网的基础国家现行测绘资质管理规定将测绘资质分为12个专业。
不同专业对人员仪器设备有不同的要求,以丙级工程测量专业为例:一、通用标准:1、具有独立法人资格,丙级测绘单位注册资金不低于100万元;2、办公场所:丙级不少于80平方米;3、质量管理:丙级测绘单位应当通过ISO9000系列质量保证体系认证或者通过设区的市(州)级以上测绘行政主管部门考核,丙级测绘单位配备专门质检人员;4、档案和保密管理:有健全的测绘成果及资料档案管理制度、保密制度和相应的设施:有明确的保密岗位责任,与涉密人员签订了保密责任书;明确专人保管、提供统计报表;建立测绘成果核准、登记、注销、检查、延期使用等管理制度;有适宜测绘成果存储的介质和库房;5、档案管理考核:丙级测绘单位应当通过设区的市(州)级以上测绘行政主管部门考核,取得通过考核的证明文件;二、工程测量丙级标准:6、测绘及相关专业人员:8人(中级3);7、测绘设备:(1)GPS接收机3台(5mm+1ppm精度以上);(2)全站仪3台(其中2秒级精度以上不少于1台);(3)水准仪2台(S3级精度以上);(4)A1幅面以上绘图仪1台。
更多更详细要求可以参阅《测绘资质分级标准》。
测绘资质分级标准2014-08-27 文号:国测管发〔2014〕31号发文时间:2014-07-01前言一、本标准划分为通用标准、专业标准两部分。
GPS网的布设

相邻点距离 (km) 100~2000 15~250 5~40 2~15 1~10
• A级网一般为区域或国家框架网、区域动力学 网;B级网为国家大地控制网或地方框架网;C 级网为地方控制网和工程控制网;D级网为工 程控制网;E级网为测图网。
• 美 国 联 邦 大 地 测 量 分 管 委 员 会 ( Federal Geodetic Control Subcommittee-FGCS)在1988 年公布的GPS相对定位的精度标准中有一个AA 级的等级,其要求固定误差≤3mm,比例误差 ≤0.01ppm,此等级的网一般为全球性的坐标 框架和地球动力学测量。
• 适用范围:C,D。
4.同步图形扩展式的布网
• 形式:多台接收机在不同测站上进行同步观测,在完 成一个时段的同步观测后,又迁移到其它的测站上进 行同步观测,每次同步观测都可以形成一个同步图形, 在测量过程中,不同的同步图形间一般有若干个公共 点相连,整个GPS网由这些同步图形构成。
• 一个由n台仪器测定的同步图形中:
• 优点:效率高。 • 缺点:图形强度弱 • 适用范围:D,E。
四、同步图形的连接方式
• 点连式 • 边连式 • 网连式 • 混连式
1. 点连式
• 形式:相邻的同步图形间只通过一个公共点相连。 • 优点:作业效率高,图形扩展迅速。 • 缺点:图形强度低,如果连接点发生问题,将影响到
后面的同步图形。
• 根据精度划分
1. 精度指标
:网中相邻点弦长精度(mm); a:固定误差(mm); b:比例误差(ppm); D:相邻点间的距离(km)。
2. GPS网的等级
测量 分类
A B C D E
固定误差
a (mm)
≤5 ≤8 ≤10 ≤10 ≤10
GPS控制点等级

3.1 观测时段observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3.2 同步观测simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
3.3 同步观测环simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
3.4 独步观测环independent observation loop由非同步观测获得的基线向量构成的闭合环。
3.5 数据剔除率percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
3.6 天线高antenna height观测时接收机相位中心至测站中心标志面的高度。
3.7 参考站Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8 流动站roving station在参考站得一定范围内流动作业的接收机所设立的测站。
3.9 观测单元observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3.10 世界大地坐标系1984(GPS84) World Geodetic System 1984由美国国防部在与WGS72 相应的精密星历N SWC-9Z-2 基础上,采用1980 大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系。
3.11国际地球参考框架I TRF YY ,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY 天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
GPS控制测量(CP0,CPⅠ,CPII) PPT
( CP0, CPⅠ,CPⅡ)
中南大学
一、三网合一
➢ 1、目的 为统一高速铁路工程测量的技术要求,保证其
测量成果质量满足勘测、施工、运营维护各个阶段 测量的要求,适应高速铁路工程建设和运营管理的 需要。
➢ 2、主要技术要求 ❖ 高速铁路工程测量平面坐标系应采用工程独立坐标系统,
在对应的线路轨面设计高程面上坐标系统的投影长度变 形值不宜大于10mm/km。
❖ 用作CPⅠ控制网约束平差的约束点间边长相对 中误差应满足<规范>的规定;
❖ 约束平差中基线向量各分量改正数与无约束平 差同一基线改正数较差的绝对值应满足下式要 求,并提供约束平差后相应坐标系的空间直角坐 标,基线矢量及其改正数和其精度信息
dVVx 2
dVVy 2
dVVz 2
四、CPⅡ 控制测量
Wx 3 n
Wy 3 n Wz 3 n
Ws 3 n
4、CPⅠ控制网平差及坐标转换应符合下列规定
❖ 无约束平差中基线向量各分量的改正数绝对值应满足下 式的要求,并提供无约束平差WGS-84 坐标系中的空间 直角坐标,基线矢量及其改正数和其精度信息
VVx 3 VVy 3 VVz 3
其中,在计算σ时,取a=5mm,b=1mm/Km,d取各 时段基线长度平均值。
1、CPⅡ控制测量原则
❖ CPⅡ控制网宜在定测阶段完成; ❖ 采用三等GPS测量或三等导线测量方法施测;
➢ 2、观测要求
➢பைடு நூலகம்3、数据处理
什么是单基线解?什么是多基线解?
公式如何理解?
公式3.2.8-2中:
➢ 4、CP0复测要求
三、CPⅠ 控制测量
1、CPⅠ控制测量原则 ❖ CPⅠ控制网宜在初测阶段建立,困难时应在定
GPS控制网等级分类和规范标准

1 分类方法一:A、B、C、D、E级1.1参考规《全球定位系统GPS测量规-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4级别 B C D、E单频/双频双频/全波长双频/全波长双频/单频观测量至少有L1、L2载波相位L1、L2载波相位L1载波相位同步观测机数≥4 ≥3 ≥2观测:表1.5级别级别B C D E卫星截止高度角/度10 15 15 15同时观测有效卫星数≥4 ≥4 ≥4 ≥4有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
GPS控制网等级分类和规范

≥15 ≥1.4 ≥4 ≤30 ≤6
≥10 ≥1.2 ≥4 ≤30 ≤6
ds≦ σ 式中:ds----重复基线测量的差值;
σ---标准差。 3) 各级 GPS 网同步环闭合差应符合式 3.2 的规定。
≦σ
(3.1)
≦σ
≦σ
≦σ
式中:n----环或附和路线的边数 σ---标准差 4) 各级 GPS 网异步环闭合环或附合路线坐标闭合差应符合公式 3.3 的规定。
测量等级
最弱相邻点边长相对中误差
二等 三等 四等
1/100 000 1/70 000 1/35 000
一级 二级
1/20 000 1/10 000
测量等级 二等 三等 四等
表 3.3 相邻点间平均边长参照值
平均边长(km)
测量等级
3.0
一级
2.0
二级
1.0
平均边长(km) 0.5 0.3
测量等级 二等 三等 四等 一级 二级
dV△X≦
σ
dV△y≦
σ
式中:σ---标准差(mm)。
1、控制网等级及其用途
dV△z≦
σ
GPS 控制网等级
页脚内容10
(3.5)
页眉内容
按照国家标准《全球定位系统(GPS)测量规范》(GB/T13814-2009),GPS 测量按其精度分为 A、B、C、 D、E 五级。其中:
1)A 级 GPS 网由卫星定位连续运行基站构成,用于建立国家一等大地控制网,进行全球性的地球动力学 研究、地壳变形测量和卫星精密定轨测量。
坐标年变化率中误差
水平分量/ (mm/a)
垂直分量/ (mm/a)
5
10
10
20
GPS控制点等级要点

3.1观测时段observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3.2同步观测simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
3。
3同步观测环simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
3。
4独步观测环independent observation loop由非同步观测获得的基线向量构成的闭合环。
3.5数据剔除率percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
3.6天线高antenna height观测时接收机相位中心至测站中心标志面的高度。
3。
7参考站Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8流动站roving station在参考站得一定范围内流动作业的接收机所设立的测站。
3.9观测单元observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3。
10世界大地坐标系1984(GPS84)World Geodetic System 1984 由美国国防部在与WGS72相应的精密星历NSWC—9Z-2基础上,采用1980大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系.3.11国际地球参考框架ITRF YY,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
3.12GPS静态定位测量static GPS positioning通过在多个测站上进行若干个时段同步观测,确定测站之间相对位置的GPS定位测量。
GPS控制点等级
3.1观测时段observ ation sessio n测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3.2同步观测simult aneou s observ ation两台或两台以上接收机同时对一组卫星进行的观测。
3.3同步观测环 simult aneou s observ ation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
3.4独步观测环 indepe ndent observ ation loop由非同步观测获得的基线向量构成的闭合环。
3.5数据剔除率 percen tageof data reject ion同一时段中,删除的观测值个数于获得的观测值总数的比值。
3.6天线高 antenn a height观测时接收机相位中心至测站中心标志面的高度。
3.7参考站 Refere nce statio n在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8流动站 roving statio n在参考站得一定范围内流动作业的接收机所设立的测站。
3.9观测单元observ ation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3.10世界大地坐标系 1984(GPS84) WorldGeodet ic System 1984由美国国防部在与WGS72相应的精密星历N SWC-9Z-2基础上,采用1980大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系。
3.11国际地球参考框架ITRF YY,Intern ation al Terres trial Refere nce Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERSYY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
(完整版)测量常用规范、规程主要技术要求、规定汇总
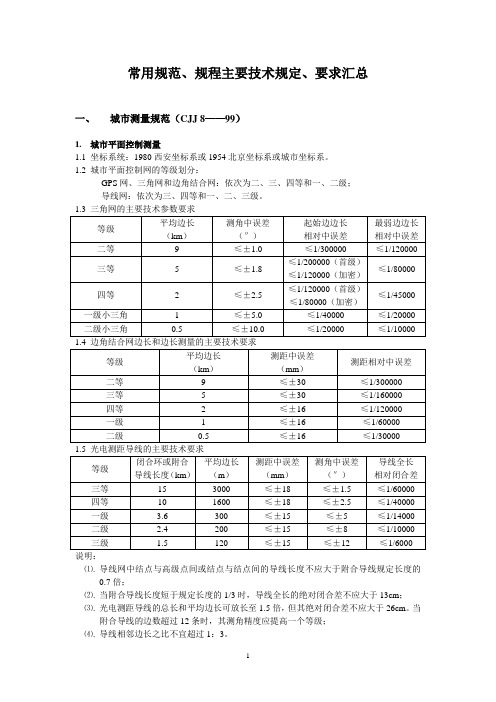
常用规范、规程主要技术规定、要求汇总一、城市测量规范(CJJ 8——99)1. 城市平面控制测量1.1 坐标系统:1980西安坐标系或1954北京坐标系或城市坐标系。
1.2 城市平面控制网的等级划分:GPS网、三角网和边角结合网:依次为二、三、四等和一、二级;导线网:依次为三、四等和一、二、三级。
说明:⑴.导线网中结点与高级点间或结点与结点间的导线长度不应大于附合导线规定长度的0.7倍;⑵.当附合导线长度短于规定长度的1/3时,导线全长的绝对闭合差不应大于13cm;⑶.光电测距导线的总长和平均边长可放长至1.5倍,但其绝对闭合差不应大于26cm。
当附合导线的边数超过12条时,其测角精度应提高一个等级;⑷.导线相邻边长之比不宜超过1:3。
0d注:n为测站数。
⑴.凡超出以上规定限差的结果,均应进行重测。
重测应在基本测回完成后并对成果综合分析后再进行。
⑵.2C较差或各测回较差超限时,应重测超限方向并联测零方向。
因测回较差超限重测时,除明显孤值外,原则上应重测观测结果中最大和最小值的测回。
⑶.零方向的2C较差或下半测回的归零差超限,该测回应重测。
方向观测法一测回中,重测方向数超过方向总数的1/3时(包括观测三个方向有一个方向重测),该测回应重测。
⑷.采用方向观测法时,每站基本测回重测的方向测回数,不应超过全部方向测回总数的1/3,否则整站重测。
⑸.基本测回成果和重测成果,应载入记簿。
重测与基本测回结果不取中数,每一测回只取一个符合限差的结果。
⑹.因三角形闭合差、极条件、基线条件、方位角条件自由项超限而重测时,应进行认真分析择取有关测站整站重测。
注:1.往返较差应将斜距化算到同一水平面上方可进行比较;2. (a+b·D)为仪器标称精度。
2. 城市高程控制测量2.1 高程系统:1985国家高程基准或沿用1956年黄海高程系统。
2.2 城市高程控制测量方法与等级:水准测量和三角高程测量。
水准测量等级依次分为二、三、四等,首级高程控制不应低于三等水准。
GPS控制网等级分类

1分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2界面显示参数表1.5有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60% 注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ(1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:对于四站以上同步观测时段,在处理完个边观测值后,应检查一切可能的三边环闭合差。
和各坐4)B、C、D、E级GPS网外业基线的处理结果,其独立闭合环或附和路线坐标闭合差WS标分量闭合差应满足公式(1.3)的规定。
≦3σ≦3σ≦3σ≦3σ(1.3)=n为闭合环数。
WS(2)基线向量解算2分类方法二:城市二、三、四等和一、二级城市或工程GPS按相邻点的平均距离和精度划分为二、三、四等和一、二级。
2.1参考规范《全球定位系统城市测量技术规范-1997》2.2界面显示参数表2.1固定误差需要输入比例误差系数需要输入最弱边相对中误差平均距离同步环坐标分量相对闭合差同步环线全长相对闭合差2.3划分标准1)各等级GPS网相邻点间弦长精度应按公式2.1计算σ=(2.1)式中σ----标准差(基线向量的弦长中误差mm);a-----固定误差(mm);b-----比例误差系数(1X10-6);d-----相邻点间的距离(km)。
精密控制B级GPS网技术设计
1.1.1 GPS 测量按精度应划分为AA、A、B、C、D、E 级,布网时可以根据控制测量的精度要求逐级布网。
B 级主要用于局部变形监测和各种精密工程测量,也可以作为建立国家空间大地测量控制网的基础。
1.1.2 各级网相邻点间弦长精度应按公式1.1.1 计算σ= a2 +(b.d) 2 (1.1.1)式中σ——基线弦长标准差(mm)a——固定误差(mm)b ——比例误差(mm/km)d ——相邻点距离(km)1.1.3 各等级网的精度指标应满足表4.1.3 的规定。
精度分级表1.1.1 等级固定误差a (㎜) 比例误差系数AA ≤3 ≤0.01A ≤5 ≤0.1B ≤8 ≤1C ≤10 ≤5D ≤10 ≤10E ≤10 ≤201.2.1 控制网设计应视其目的,预期达到的精度,作业时卫星的可见性,成果的可靠性,以及参加作业的接收机台数,交通等后勤条件,按照优化设计的原则进行。
1.2.2 控制网的设计应满足下列准则:(1) 精度设计应满足表1.1.1 中相应等级的指标;(2) 按下式计算的网的平均可靠率r 应大于0.25~ rr (1.2.2)n式中 r ——控制网中多余观测数;n ——控制网中的总观测数。
(3) 基准设计应满足投影变形限值的要求。
1.2.3 控制网应由一个或者若干个独立观测环构成。
当网的可靠性和精度要求较高时,宜采用三角形网或者大地四边形网;当精度要求较低时,可采用四边形网、导线环、附合路线或者包括这些布网形式的混合网。
普通不得用单基线定点。
1.2.4 AA、A、B 级控制网普通应布设成连续网,除边缘点外,每点的连接点应不少于3 个。
1.2.5 控制网同步图形之间的连接应采用边联式或者网联式。
当精度要求不高时,也可采用点联式布网,但应加强全网定位结果的检核,防止粗差浮现。
1.2.6 控制网最简独立闭合环或者附合路线边数应符合表 1.2.6 的规定。
最简独立环或者附合路线边数的规定表 1.2.6等级闭合环或者附合路线边数E≦10D≦8A≦5C≦6B≦61.2.7 各级 GPS 控制网相邻点间平均距离应符合表 1.2.7 的规定。
GPS控制网等级分类与规范标准[详]
![GPS控制网等级分类与规范标准[详]](https://img.taocdn.com/s3/m/8aa0287ced630b1c59eeb599.png)
的较差(d V△X 、d V△Y 、d V△Z)应符合下式要求:
dV△X≦2σ
dV△y≦2σ
dV△z≦2σ
()
当超限时,可认为作为约束的已知坐标、距离,已知方位与 GPS 网不兼容,应采用软件
提供的或人为的方法剔除某些误差较大的约束值,直至符合上式要求。
3 分类方法三:公路二、三、四等和一、二级
公路二等、三等、四等、一级、二级
四等 2
≤10 ≤10
1/45000
一级 1
≤10 ≤10
1/20000
二级 <1
≤15 ≤20
1/10000
注:当边长小于 200m 时,边长中误差小于 20mm。
3)布网原则
接收机选择,观测基本技术要求(略),参考规范六七章。
闭合环或附和路线边数的规定
等级
二等 三等 四等 一级 二级
闭合环或附和路线的边数 ≤6 ≤8 ≤10 ≤10 ≤10
坐标基准框架,为省、市区域提供不同精度的位置服务和相关信息服务。区域基准站网的布设
按实时定位精度而选择基准站间的距离,当采用网络 RTK 技术满足厘米级实时定位,其区域基 准站布设间距不应超过 80KM。 (3)专业应用站网 专业应用站网是由专业部门或者机构根据专业需求建立的基准网站,用于开展专业信息服务。
3、卫星定位连续运行基准站网的布设 1)布设原则
CORS 依据管理形式、任务要求和应用范围,划分为国家基准站网、区域基准站网和专业应用 站网。
(1)国家基准站网 国家基准站网的布设应顾及社会发展、经济建设和自然条件因素。在即将实施的国家大地基准
基础设施建设项目中,我国将在全国范围内建设 360 个地基稳定、分布均匀的连续运行基准站 (其中:新建 150 个、改造 60 个、直接利用已有的站 150 个)。 (2)区域基准站网 区域基准站网是指在省、市地区建立的连续运行基准站网,主要构成高精度、连续运行的区域
GPS控制点等级

3.1观测时段observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3.2同步观测simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
3.3同步观测环simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
3.4独步观测环independent observation loop由非同步观测获得的基线向量构成的闭合环。
3.5数据剔除率percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
3.6天线高antenna height观测时接收机相位中心至测站中心标志面的高度。
3.7参考站Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8流动站roving station在参考站得一定范围内流动作业的接收机所设立的测站。
3.9观测单元observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3.10世界大地坐标系1984(GPS84) World Geodetic System 1984由美国国防部在与WGS72相应的精密星历NSWC-9Z-2基础上,采用1980大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系。
3.11国际地球参考框架ITRF YY,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
3.12GPS静态定位测量static GPS positioning通过在多个测站上进行若干个时段同步观测,确定测站之间相对位置的GPS定位测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 分类方法一:A、B、C、D、E级
参考规范
《全球定位系统GPS测量规范-2009》
界面显示参数
划分标准
B、C、D和E级的精度应不低于表1的要求:
表
布设原则:
表
各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:
表
观测:
表
数据处理
(1)外业数据检核
1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式的规定:
ds≦2√2σ
σ---为基线测量中误差,单位为毫米
2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:
三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式
w x≦√3
σ
5
w y≦√3
σ
5
σ()
w z≦√3
5
式中:
对于四站以上同步观测时段,在处理完个边观测值后,应检查一切可能的三边环闭合差。
4) B、C、D、E级GPS网外业基线的处理结果,其独立闭合环或附和路线坐标闭合差W S和各坐标分量闭合差应满足公式()的规定。
w x≦3√nσ
w y≦3√nσ
w z≦3√nσ
w s≦3√nσW S=√w x2+w y2+w z2n为闭合环数。
(2)基线向量解算
2 分类方法二:城市二、三、四等和一、二级
城市或工程GPS按相邻点的平均距离和精度划分为二、三、四等和一、二级。
参考规范
《全球定位系统城市测量技术规范-1997》
界面显示参数
划分标准
1)各等级GPS网相邻点间弦长精度应按公式计算
σ=√a2+(bd)2()
式中σ----标准差(基线向量的弦长中误差mm);
a-----固定误差(mm);
b-----比例误差系数(1X10-6);
d-----相邻点间的距离(km)。
2)各等级GPS网的主要技术要求应符合表规定。
相邻点最小距离应为平均距离的1/2~1/3;最大距离应为平均距离的2~3倍。
表 GPS网的主要技术要求
注:当边长小于200m时,边长中误差小于20mm。
3)布网原则
接收机选择,观测基本技术要求(略),参考规范六七章。
闭合环或附和路线边数的规定
4)同一时段观测值基线处理中,二、三等数据采用率都不宜低于80%。
5)采用单基线处理模式时,对于采用同一种数学模型的基线解,其同步时段中任一三边同步环的坐标分量相对闭合差和全长相对闭合差不宜超过表的规定。
表同步环坐标分量及环线全长相对闭合差的规定(1X10-6)
6)对于采用不同数学模型的基线解,其同步时段中任一三边同步环的坐标分量闭合差和全长相对闭合差按独立环闭合差要求检核。
同步时段中的多边形同步环,可不重复检核。
7)无论采用单基线模式或多基线模式解算基线,都应在整个GPS网中选取一组完全的独立基线构成独立环,各独立环的坐标分量闭合差和全长闭合差应符合下式的规定:
w x≦2√nσ
w y≦2√nσ
w z≦2√nσ
w≦2√nσ()
式中w---环闭合差,w=√w x2+w y2+w z2
n------独立环中的边数
8)复测基线的长度较差,不宜超过下式的规定:
ds≦2√2σ(
9)无约束平差中,基线向量的改正数(V△X、V△y、V△Z)绝对值应满足下式要求:
V△X≦3σ
V△y≦3σ
V△z≦3σ
10)约束平差中,基线向量的改正数与剔除粗差后的无约束平差结果的同名基线相应改正数的较差(d V△
X、d V△Y、d V△Z)应符合下式要求:
dV△X≦2σ
dV△y≦2σ
dV△z≦2σ()
当超限时,可认为作为约束的已知坐标、距离,已知方位与GPS网不兼容,应采用软件提供的或人为
的方法剔除某些误差较大的约束值,直至符合上式要求。
3 分类方法三:公路二、三、四等和一、二级
公路二等、三等、四等、一级、二级
参考规范
《公路勘测规范》2007
界面显示参数
划分标准
1)各等级平面控制测量,其最弱点点位中误差不得大于±5cm,最弱相邻点相对点位中误差不得大于±3cm,最弱相邻点边长相对中误差不得大于下表的规定。
表 GPS测量的主要技术要求
2)观测技术要求
3)计算要求
1)同一时段观测值的数据剔除率不宜大于10%。
2)重复基线测量的差值应满足式
ds≦2√2σ()
式中:ds----重复基线测量的差值;
σ---标准差。
3)各级GPS网同步环闭合差应符合式的规定。
w x≦√n
σ
5
w y≦√n
σ
5
w z≦√n
σ
5
w≦2√n
σ()
5
式中:n----环或附和路线的边数σ---标准差
4)各级GPS网异步环闭合环或附合路线坐标闭合差应符合公式的规定。
σ
V X≦√4n
3
V y≦√4n
σ
3
σ
V z≦√4n
3
v≦2√nσ()
式中:n----环或附和路线的边数σ---标准差
5)无约束平差中,基线分量的改正数绝对值应满足式的规定
V△X≦√3σ
V△y≦√3σ
V△z≦√3σ()
式中:σ---标准差(mm)。
6)约束平差中,基线分量改正数与经过粗差剔除后的无约束平差结果的同一基线相应改正数较差的绝对值应满足满足的规定
dV△X≦√4/3σ
dV△y≦√4/3σ
dV△z≦√4/3σ()
式中:σ---标准差(mm)。