雷尼绍 (1)
雷尼绍光栅尺读书头安装手册

非接触光栅系统安装与使用指南RGS20-S 、RGS40-S 光栅安装(End Clamps)Renishaw (雷尼绍)安装准备1. 剪裁所需光栅,确保光栅的长度能满足行程的要求。
请预留把光栅尺伸延至“起始”标记点。
未到达标记点前,一定要避免光栅尺粘贴到表面上。
确保光栅尺已粘贴到全行程的表面上。
安装过程中,避免扭曲及用力拖拽光栅尺。
图(1)图(2)除去端压块底部两边的胶纸。
胶纸的作用是在胶水未稳固时临时固定端压块。
4. 把端压块粘贴到光栅尺的末端。
备注:必须擦净端压块周边的多余胶水,否则读数头的信号会受影响。
型号端压块(End Clamps)所有型号的光栅上安装,并能多次重复使用。
RGA22GRGA245RGA245RGA22G读数头安装读数头设定图(3)图(3)是一个简单安装支架设计。
螺丝(A) ---- 夹紧读数头,设定Pitch 参数螺丝(B) ---- 设定Yaw 参数和偏移螺丝(C) ---- 可设定Roll 参数安装支架设定固定读数头的托架,必须有平坦表面,能满足读数头安装上的机械公差。
其次必须能调节读数头高度并有足够的稳定性,以预防在读数头工作期间所受到的所有外界影响。
为了减少光栅的安装问题,在未使用光栅安装器(Scale Guide)粘贴光栅前,请先把机械托架的Roll 参数和Yaw 参数调节到读数头的误差范围内,可使用clock gauge 或precision square 完成设定。
对于RGH22、RGH26和RGH41,设定读数头的高度,可透过蓝色和或橙色的校准胶片放置于读数头和光栅尺之间,读数头的LED 安装指示灯显示绿色,表示安装正确。
橙色的校准胶片还可以帮助设定读数头相对于光栅尺的偏移和Yaw 参数 。
对于RGH24和RGH25读数头,设定只可透过蓝色校准胶片放置于读数头和光栅尺之间, 读数头的LED 安装指示灯显示绿色,表示安装正确。
读数头高度设定完成后,以缓慢的速度移动读数头,确保读数头的指示灯在光栅尺的整个行程内都保持绿色。
雷尼绍使用手册
雷尼绍中文说明书 山善(上海)贸易有限公司技术部一. 雷尼绍测头的标定:测头标定是矫正测头球相对主轴中心线的偏差和测头的长度误差以及探针球的半径误差。
1在以下几种情况下需要标定测头: a 第一次使用测头时。
b 测头上安装了新的探针。
c 怀疑探针弯曲或测头发生碰撞时。
d 周期性地进行标定以补偿机床的机械变化误差。
e 如果测头柄的重新定位的重复性差。
2 将已知内孔经的Master (随测头一起标定用的标准块)置于工作台且靠近主轴的一边。
a. 如图一所示用千分表将Master 沿着X 方向拉平后水平的固定在台 面上;b. 用千分表找正Master标位置(将其置于G54X- Y-中); c.在主轴上安装验棒(Testbar),移动 Z 轴并用块规测量master 的位置如图二所示 d.使w 轴在原点位置,譬如 Testbar 长度=350.311mm块规长度=30.00mm此时Z轴机械坐标为-1148.291mm (图一)(图二) e.设定标定时用的工件坐标系Z=-1148.291+(-30.0)+(-350.311)=-1528.602mm(将其置于G54Z--)f.执行T1M06(因为预先设定T01为测头专用);g.将测头安装到主轴上,擦干净测球并用千分表测量测球的跳动,如果跳动大需要重新调整(测头柄上四个方向均有调整螺丝);h.测头每次安装到主轴孔内时必须一致即不能旋转180度再安装,为了避免误差;3.完整标定测头需要O9801、O9802及其O9803或者O9804程序 标定程序依次说明:1.(O9801)测头长度的标定:格式如下:G65P9801Zz Tt;例题:在G54工件坐标系中设置X、Y、Z的值;O0001G90G80G40G0G54X0Y0G43H01Z100. (因测头通常设定为T01,激活1号补正,定位到100mm处) G65P9832 (旋转开启测头包含主轴定位)G65P9810Z10.F3000(保护定位移动)G65P9801Z0T1 (Z向标定,T1表示刀补号码)G65P9810Z100 (保护定位移动到Z100.0处)G65P9833 (旋转关闭测头)G28Z100. (参考点返回)H00 (取消刀补)M302(O9802)标定探针的X、Y方向偏心:格式:G65P9802Dd Zz上述D是表示标准块的内径值,当使用凸台标定时要使用Zz,省略时表示用孔来标定。
雷尼绍探头的工作原理
雷尼绍探头的工作原理
雷尼绍探头(Rennie cell)是一种用于气体测量的装置,主要用于对不同气体样品中的化学成分进行定量分析。
其工作原理基于气体在一定温度和压力下的体积变化,利用差压传感器测量出的气体流速来计算气体浓度。
雷尼绍探头由一个U型管和一个C形管组成,两者通过一段细小的通道连接。
当气体样品通过C形管进入U型管时,气体将顺序通过细小通道。
当气体在细小通道中流动时,由于气体的流速不同,气体在通道中会形成压力差。
这个压力差将会导致U型管中的液体从一个侧面流向另一侧面。
测量液体在U型管中的位移可以通过光学传感器或机械装置实现。
通过测量液体的位移,可以计算出气体在通道中的流速,进而根据气体流速和通道的几何参数计算出气体的浓度。
总结起来,雷尼绍探头的工作原理是通过测量气体在通道中的流速差异,然后根据流速差异计算气体浓度。
这种探头适用于需要准确测量气体浓度的场合,如环境监测、工业过程控制等。
雷尼绍探头设定及使用
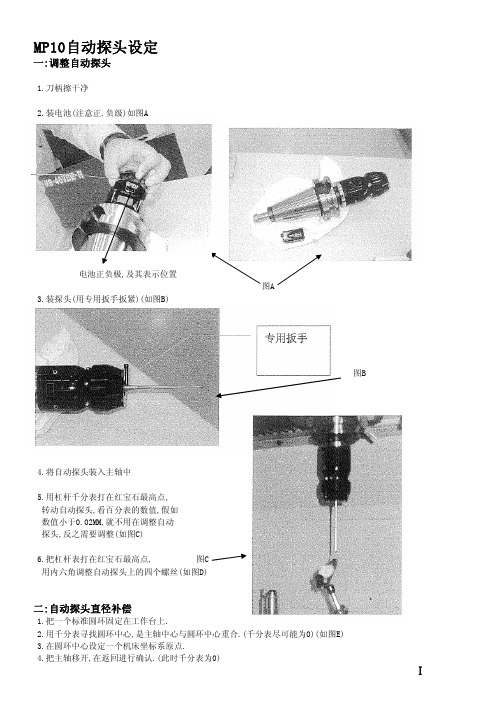
MP10自动探头设定一:调整自动探头1.刀柄擦干净2.装电池(注意正.负级)如图A电池正负极,及其表示位置图A3.装探头(用专用扳手扳紧)(如图B)图B4.将自动探头装入主轴中5.用杠杆千分表打在红宝石最高点,转动自动探头,看百分表的数值,假如数值小于0.02MM,就不用在调整自动探头,反之需要调整(如图C)6.把杠杆表打在红宝石最高点, 图C用内六角调整自动探头上的四个螺丝(如图D)二:自动探头直径补偿1.把一个标准圆环固定在工作台上.2.用千分表寻找圆环中心,是主轴中心与圆环中心重合.(千分表尽可能为0)(如图E)3.在圆环中心设定一个机床坐标系原点.4.把主轴移开,在返回进行确认.(此时千分表为0)Ⅰ调整螺丝位置图D 图E (FM MP3的调整螺丝在圆锥盖得里面)5.把自动探头放入主轴中,走到设定的原点(如图F)6.在MDI方式下,输入CALL OO18,启动.(自动探头加电,会有几秒的延时) (FMMP3输入 : CALL OO16)7.把自动探头下降到基准圆环平面以下10MM左右.8.在MDI方式下,输入CALL OO21,启动.(将设定的原点读入MSB原点)9.画面放在"测量结果显示",按"MSB原点"(MSB原点坐标,No.3号坐标系).10.输入VNCOM[1]=8,启动.11.将画面放在"测量结果显示"按"传感器",用手轻碰探头,看到传感器画面有黄色的指示灯会亮,进行信号确认,表示探头有信号.12.在MDI方式下,输入:CALL OO10 PMOD=9 PDI=50 POVT=3 启动.PMOD=9 表示自动探头半径补偿 PDI=50 表示基准环的准确直径 POVT=3表示超行程距离13.测量结果在"测量表示画面",按"MSB刀具ON/OFF"键.半径补偿的1-4号半径补偿值为探头4个方向的补偿值.14.在MDI方式下,输入:CALL OO19 启动(表示断电)(FMMP3输入:CALL OO17)三:自动探头长度方向补偿1.换基准棒.(记下标准棒的长度,假如为199.9MM)2.将基准棒的端面与量块轻微接触到(如图G).3.在此位置设定Z方向的原点.a.绝对长刀具补偿:运算199.9b.相对刀具补偿:运算04.抬起基准刀具,主轴换上自动探头.5.在MDI方式下输入:CALL OO18 启动 <VNCOM[1]=8检测信号>6.在手动方式下,将自动探头放在量块的上方,大约10MM左右(如图F).* 相对补偿,PLI=自动探头长度-基准棒长度(大概距离)9.CALL OO19 (自动探头断电)四:复制补偿数值图F1.将"MSB刀具ON/OFF"中的,半径补偿1-4号复制到5-20号,长度补偿的5号复制的1-4号.2.在MDI方式下,输入:CALL OO22 Ⅱ间距10MM左右 图G 图H使用自动探头一:内径测量1.探头放在孔的中心位置(大概),把探头的顶端移到孔内.2.MDI方式下:输入 CALL OO18 启动(FMMP3输入CALL OO16)3.测量: CALL OO10 PMOD=7 PDI=50 启动 .(PMOD=7表示测量孔德半径.PDI=50表示孔直径的预想值) 4:测量结果在"测量结果显示"中.5.设定孔中心为原点: CALL OO20 PHN=3 PX=0 PY=0 启动.(PHN=3表示为3号坐标系,PX,PY表示X与Y偏移量) 6:在MDI方式下,输入: CALL OO19 启动(FMMP3输入:CALL OO17)二:外径测量1.探头放在孔的中卫,并且在零件的上方.2.CALL OO18启动.3.测量: CALL OO10 PMOD=6 PDI=100 PIN=25 启动 (PMOD=6表示测量外径 PDI=100表示外径的预想值 PIN=25表示从探头顶端下降25mm.)4.以下操作同测内径操作.三:X向的端面测量 1.探头放在离被测平面不远的地方.2.在MDI方式下,输入: CALL OO10 PMOD=1 PEI=-255 启动 .(PEI=-255表示X向的预想值,预想值=当前位置+到被测面得距离) 3.设原点同上,设好原点后,再次确认,输入:CALL OO10 PMOD=1 PEI=0启动 PEI=0表示确认面与测量面差值为0.四:Y向端面测量1.测量:CALL OO10 PMOD=2 PEI=800 启动2.设原点和再次确认操作步骤同上.五:Z向测量.1.探头方在被测零件平面的上方.2.在MDI方式下,输入: G56H5 启动,HS=5表示MSB刀具长度补偿为五号.3.测量:CALL OO10 PMOD=3 PEI=-111 启动4.设原点和再次确认同上.六:测量两点间的距离探头放在被测量两点的大约中间位置.*X向测量:CALL OO10 PMOD=11 PELI=60 启动 *Y向测量:CALL OO10 PMOD=12 PELI=85 启动七:测量两端面的距离探头放还在被测两端面的中间,并放在零件的上面.* X向测量:CALL OO10 PMOD=11 PELI=130 PIN=30 启动* Y向测量:CALL OO10 PMOD=12 PELI=130 PIN=30 启动END Ⅲ。
雷尼绍探头编程步骤 V01

雷尼绍探头使用介绍第一章探头程序编程第一节编探点程序1.定原点,找各探点坐标值先在UG软件里定好工件坐标系原点,然后用UG软件将需要探点的位置的点(X Y Z)找出来,记录下来,以编探点程序用。
2.编探点程序(探点程序的名字自己定如:O6666)探点程序里面控制探头的移动需要调用两个重要的探头运算程序O9810 和O9811。
探点程序格式案例:(以下是编探Z点的案例)%O6666(PROBE)G91G28Z0G90 G0 G17 G40 G49 G69 G80M6 T11 (探头装在 T11刀座上,换 T11 号探头到主轴上)G90 G00 G54 X-18. Y50. (快速定位到到G54坐标系中的要探点的第一个点上方)M19 (S_ ) (主轴定位,S是让主轴转一个角度,如果是探Z轴方向的点, S就不需要,如果是探侧面,就需要S,即转角度,使探头在探各侧面时都是使用探针红宝石球的一个面测量,减小误差)M05M17 (open probe) (打开探头,这个指令是由接线时接到相应端口决定的)G43 Z50.H11 (建立刀长,即读取探头的长度)G90G00Z50. (探头快速下到Z50.的位置)N1(Z+ POINT1) (测第一个点的Z值)G65P9810 X-18. Y50. F3000. (安全快速定位到第一个点的X Y位置,速度为F3000.)G65P9810 Z19. (安全快速定位到第一个点上方的安全的Z位置,速度同上,此处高度一般离下面要测的点3MM)G65P9811 Z16.08 (安全慢速到达第一个探点的Z位置,另外,此步探完点后,会自动的返回到上一步Z19.0的位置)#601=#142 (#142为第一个探点的理论Z16.08与实际探得的“Z实”的差值,它是在O9811里面自动计算,然后传递给#142,#142再将所得的值传递给#601,#601为第一个点Z向要补尝的值)G65P9810 Z20. (安全快速移到安全高度Z20.的位置)N2(Z+ POINT1)(测第二个点的Z值)G65P9810 X-16.5 Y48.3 F3000. (安全快速定位到第二个点的X Y位置,速度为F3000.)G65P9810 Z17. (安全快速定位到第二个点上方的安全的Z位置,速度同上,此处高度一般离下面要测的点3MM)G65P9811 Z14.23 (安全慢速到达第二个探点的Z位置,另外,此步探完点后,会自动的返回到上一步Z19.0的位置)#602=#142 #142为第二个探点的理论Z16.08与实际探得的“Z实”的差值,它是在O9811里面自动计算,然后传递给#142,#142再将所得的值传递给#601,#601为第二个点Z向要补尝的值)G65P9810 Z35. 安全快速移到安全高度Z20.的位置)N3(Z+ POINT1) (测第三个点的Z值)G65P9810 X12.5 Y51.1 F3000.G65P9810 Z19.G65P9811 Z16.08#603=#142G65P9810 Z20.N4(Z+ POINT1) (测第四个点的Z值)G65P9810 X12.2 Y49.2 F3000.G65P9810 Z16.G65P9811 Z13.73#604=#142G65P9810 Z35................N16(Z+ POINT1) (测第十六个点的Z值)G65P9810 X-16.5 Y-18.2 F3000.G65P9810 Z16.G65P9811 Z14.23#616=#142G65P9810 Z35.(下面是对各探测的点的差值Z设定公差范围,超过了公差即跳转到N20 处执行)#620=0.1 (设定公差为0.1,赋值给#620)IF[ABS[#601]GT#620]GOTO20 (如果#601的绝对值大于#620的值,即跳转到N20 处执行)IF[ABS[#602]GT#620]GOTO20 (如果#602的绝对值大于#620的值,即跳转到N20 处执行)IF[ABS[#603]GT#620]GOTO20 (如果#603的绝对值大于#620的值,即跳转到N20 处执行)...............M18G91G28Z0M99N20 #3000=99 point cuo wu Z OUT OF TOL (报警提示,Z超公差,此处“#3000=”后面可以为自己设定0-200另加的提示信息)G91G28Z0M99第二节编辑加工程序将各探点对应的补尝值变量(#601 #602 #603 ......)加到加工程序里面对应的点的坐标处。
雷尼绍球杆仪的作用

雷尼绍球杆仪的作用
雷尼绍球杆仪(Renishaw Ballbar)是用于机床性能评估和校准的一种精密测量设备。
它主要用于评估和测试机床的圆度、直线性、重复性以及其它几何精度相关的性能参数。
以下是雷尼绍球杆仪的一些主要作用:
1.机床性能评估:雷尼绍球杆仪能够在机床操作过程中测量
运动轴的运动误差和机床的定位精度。
通过评估球杆测量
结果,可以识别机床的轴向误差、位置偏差、重复性等问
题,从而评估机床的性能和精度。
2.机床校准和调整:通过对测量数据的分析,雷尼绍球杆仪
可以指示机床潜在的机械问题和运动误差。
根据测量结果,可以根据需要采取校准和调整步骤,来提高机床的几何精
度和性能。
3.故障诊断和维护:雷尼绍球杆仪通过监测和测量机床轴向
的性能,还可以帮助检测并诊断机床的故障和问题。
当机
床发生异常或性能下降时,通过球杆测量结果可以定位问
题的源头并进行适当的维护和修复。
4.机床精度验证:雷尼绍球杆仪提供了一种用于验证机床几
何性能和重复性的标准方法。
通过定期测量,可以跟踪机
床的性能变化,并确保其在规定的精度和可靠性范围内运
行。
综上所述,雷尼绍球杆仪在机床制造和维护过程中扮演了重要
的角色。
它可以帮助评估机床的性能和精度,并提供有效的校准和维护指导,以确保机床的稳定性、精度和生产能力。
雷尼绍对刀仪(Renishaw)
摘要英国雷尼绍公司的对刀仪在数控车床上应用有三种,插拔式手臂(HPRA)、下拉式手臂(HPPA)、全自动对刀臂式。
可以快速、高效、精确地在士X、土Z及Y五个轴方向上,对加工过程中的刀具磨损或破损自动监测、报警和补偿;对机床丝杠热变形引起的刀偏值变动量进行补偿。
关键词数控车床对刀仪刀具补偿中图分类号TP216 文献标识码B在工件的加工过程中,工件装卸、刀具调整等辅助时间,占加工周期中相当大的比例,其中刀具的调整既费时费力,又不易准确,最后还需要试切。
统计资料表明,一个工件的加工,纯机动时间大约只占总时间的55%,装夹和对刀等辅助时间占45%。
因此,对刀仪便显示出极大的优越性。
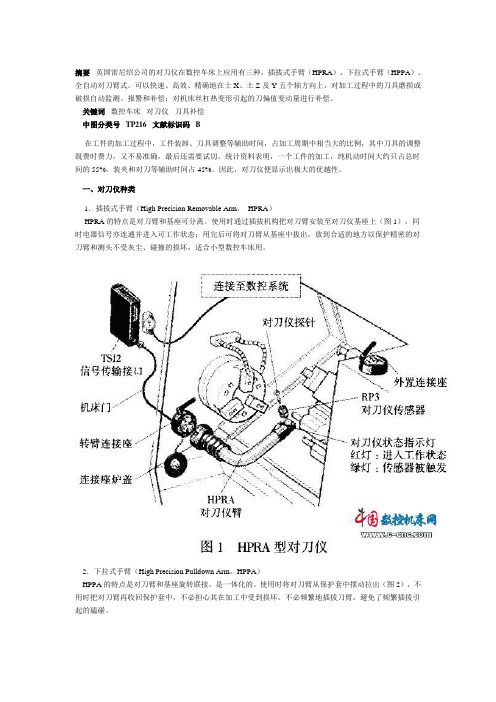
一、对刀仪种类1.插拔式手臂(High Precision Removable Arm,HPRA)HPRA的特点是对刀臂和基座可分离。
使用时通过插拔机构把对刀臂安装至对刀仪基座上(图1),同时电器信号亦连通并进入可工作状态;用完后可将对刀臂从基座中拔出,放到合适的地方以保护精密的对刀臂和测头不受灰尘、碰撞的损坏,适合小型数控车床用。
2.下拉式手臂(High Precision Pulldown Arm,HPPA)HPPA的特点是对刀臂和基座旋转联接,是一体化的。
使用时将对刀臂从保护套中摆动拉出(图2),不用时把对刀臂再收回保护套中,不必担心其在加工中受到损坏。
不必频繁地插拔刀臂,避免了频繁插拔引起的磕碰。
3.全自动对刀臂(High Precision Motorised Arm,HPMA)HPMA的特点是,对刀臂和基座通过力矩电机实现刀臂的摆出和摆回与HPPA的区别是加了力矩电机(见图2内括号中内容),提高了自动化程度。
更重要的是可把刀臂的摆出、摆回通过M代码编到加工程序中,在加工循环过程中,即可方便地实现刀具磨损值的自动测量、补偿和刀具破损的监测,再配合自动上下料机构,可实现无人化加工。
三、对刀仪的工作原理对刀仪的核心部件是由一个高精度的开关(测头),一个高硬度、高耐磨的硬质合金四面体(对刀探针)和一个信号传输接口器组成(其他件略)。
1_雷尼绍TS27R技术资料

TS27R对刀仪资料整理——by DavidTS27R的特点 减少刀具设定时间:一般传统手动量测刀具约需 5‾10 分钟,TS27R自动量刀系统只需40秒的时间即可完成刀长、刀径量测以及补 正,大幅减少刀具设定时间。
断刀破损检测:全自动之断刀检测,避免因断裂刀具造成工件损伤,降低废料产生。
避免人为误差 :由 NC程式控量测过程,避免因人为因素产生的误差。
触发力量: 1.3~2.4N (Z)、130~240N (X/Y)重现精度: ±1μm2σ感测方向: ±X、±Y 以及+Z轴向探针: 圆盘探针直径12.7mm固定方式: 使用T型螺栓固定硬件安装步骤说明:1.选择一适当位置安装TS27R,尽量避免装置在切屑或是切屑液容易覆盖的位置,建议装置在床台角落,增加床台使用空间,但须注意床台之行程极限以及避免干涉。
可自行增加底座将TS27R 加高,避免切屑及切削液影响量测。
2. 利用T型螺栓将底座固定在床台上:3安装保护蛇管: 将讯号线穿入保护管内后锁上固定环。
4. 将测头本体锁在底座上: 注意有一垫片需放至固定座上。
+5.连结断裂螺栓与holder:探针水平度调整方法:(1) 将千分表吸附在主轴上,并将探针水平度调校在3μ以内。
TS27R前后方L1和L2可调整,L3和L4可调整偏摆度。
若前方向(Front)过高,将L1螺栓放松L2螺栓旋紧,反之亦然。
若L3螺栓侧稍高,将L4螺栓放松L3螺栓旋紧,反之亦然。
圆柱形探针直径:12.7mm方形探针水平调整方法:(1) 将千分表吸附在主轴上,并将探针水平度调校在3μ以内(2)TS27R上方L3和L4微调螺栓可调整(side)偏摆度。
(3)TS27RL3螺丝下方R2与R3微调螺栓可调整(square)偏移度。
注:*若前方向(Front)过高,将 L1 螺栓放松 L2 螺栓旋紧,反之亦然。
*若 L3 螺栓侧稍高,将 L4 螺栓放松 L3 螺栓旋紧,反之亦然。
雷尼绍数控机床测头在线测量系统益处

雷尼绍数控机床测头在线测量系统益处数控机床在线检测系统数控机床是现代高科技发展的产物,每当一批零件开始加工时,有大量的检测需要完成,包括夹具和零件的装卡、找正、零件编程原点的测定、首件零件的检测、工序间检测及加工完毕检测等。
目前完成这些检测工作的主要手段有手工检测、离线检测和在线检测。
在线检测也称实时检测,是在加工的过程中实时对刀具进行检测,并依据检测的结果做出相应的处理。
在线检测是一种基于计算机自动控制的检测技术,其检测过程由数控程序来控制。
闭环在线检测的优点是:能够保证数控机床精度,扩大数控机床功能,改善数控机床性能,提高数控机床效率。
一、数控机床在线检测系统的组成数控机床在线检测系统分为两种,一种为直接调用基本宏程序,而不用计算机辅助;另一种则要自己开发宏程序库,借助于计算机辅助编程系统,随时生成检测程序,然后传输到数控系统中。
数控机床的在线检测系统由软件和硬件组成。
硬件部分通常由以下几部分组成:(1)机床本体机床本体是实现加工、检测的基础,其工作部件是实现所需基本运动的部件,它的传动部件的精度直接影响着加工、检测的精度。
(2)数控系统目前数控机床一般都采用CNC数控系统,其主要特点是输入存储、数控加工、插补运算以及机床各种控制功能都通过程序来实现。
计算机与其他装置之间可通过接口设备联接,当控制对象或功能改变时,只需改变软件和接口。
CNC系统一般由中央处理存储器和输入输出接口组成,中央处理器又由存储器、运算器、控制器和总线组成。
(3)伺服系统伺服系统是数控机床的重要组成部分,用以实现数控机床的进给位置伺服控制和主轴转速(或位置)伺服控制。
伺服系统的性能是决定机床加工精度、测量精度、表面质量和生产效率的主要因素。
(4)测量系统测量系统有接触触发式测头、信号传输系统和数据采集系统组成,是数控机床在线检测系统的关键部分,直接影响着在线检测的精度。
其中关键部件为测头,使用测头可在加工过程中进行尺寸测量,根据测量结果自动修改加工程序,改善加工精度,使得数控机床既是加工设备,又兼具测量机的某种功能。
雷尼绍数控车床对刀仪的用途及设置.1

英国“雷尼绍”(RENISHAW)车床对刀仪的用途及原理济南一机床集团有限公司李军摘要:文中着重介绍了英国“雷尼绍”公司数控车床用对刀仪的种类、用途以及简要的工作原理,同时也简要介绍了在数控车床上采用对刀仪对提高加工精度及加工效率的意义。
关键词:对刀仪种类及用途工作原理作为机械加工业中用量最大的数控车床,近些年来随国内经济的高速发展已迅速得到普及。
今天,一个企业内拥有几十台甚至上百台数控车床早已不是什么稀罕事了。
但众所周知,使用数控车床的目地是提高工件的加工质量和效率。
可是使用过数控车床的人都知道,在一个工件的加工过程中,工件的装卸、刀具的调整等辅助时间占用了加工周期中相当大的比例,其中的刀具调整更是既麻烦、又费力。
统计资料证明,实现一个工件的加工,纯机动时间大约要占总时间的55%,装、夹和对刀等辅助时间却占到45%,这实在不是一个小数。
老话讲磨刀不误砍柴工,但在现代社会中,时间就是金钱,效率就是生命。
要多砍柴就必须向磨刀要效益,对时间进行分秒必争。
那么,在提高对刀效率方面我们还有什么好办法吗?实践证明,通过在数控车床上增设对刀仪装置即是一种向“磨刀”要时间的好方法。
以下,结合英国雷尼绍公司的对刀仪装置,谈谈它在构成、用途及简要工作原理等方面的知识:1、雷尼绍公司有哪几种对刀仪装置?目前在雷尼绍车床对刀仪系列产品中共有三种型号,其对刀的原理是一样的,只是按结构的复杂程度和操作的自动化水平分为低、中、高三档型号。
第一种,HPRA (H igh P recision R emovable A rm) 型:这是一种结构较简单、价位低的型号,其特点是对刀仪的臂和基座之间是可分离的,使用时通过插拔机构把对刀仪臂安装至对刀仪基座上(图1)图1:HPRA型对刀仪的系统构成同时电器信号亦连通并进入可工作状态;用完后可将对刀臂从基座中拔出,放到合适的地方以保护精密的对刀臂和对刀传感器部分不受灰尘、碰撞的损坏。
第二种,HPPA (H igh P recision P ulldown A rm) 型:这是一种较实用、中等价位的型号。
雷尼绍XL80激光干涉仪操作手册.概要
镭射干涉仪操作手册手册内容一.RENISHAW 公司简介 1二.镭射干涉仪原理 2(1)波的速度 3(2)干涉量测原理 3(3)镭射干涉仪 4(4)镭射干涉仪一般量测项目 4三.注意事项 5四.镭射干涉仪防止误差及保养 5(1)镭射干涉仪防止误差 5(2)镭射干涉仪保养方法 6五.安全及注意事项 6六.镭射光原理及特性7七.镭射硬件介绍8八.镭射架设流程图15九.定位量测原理及操作16(1)线性定位量测原理16(2)量测方式17十.镭射易发生之人为架设误差20(1)死径误差20(2)余弦误差21(3)阿倍平移误差21 十一.镭射操作之步骤22(1)软件安装之步骤22(2)执行量测软件22(3)定位量测硬件架设之操作23(4)镜组架设前之注意事项24(5)镜组架设之步骤24 十二.定位量测之程序范例29 十三.定位量测之软件操作步骤30 热漂移量测38 快速功能键44 十四.动态软件量测之操作45(1)动态量测硬件之架设45(2)执行量测之软件46(3)位移与时间48(4)速度与时间49(5)加速度与时间50 十五.角度量设之操作52(1)注意事项52(2)镜组架设的种类53(3)镜组架测之步骤54(4)角度量测之软件操作步骤57 十六.RX10旋转轴之量测62(1)说明62(2)硬件配件之介绍62(3)硬件操作之步骤64(4)软件操作之步骤67 十七.直度量测之操作75(1)直度之分类75(2)直度量测之硬件架设75(3)镜组架设之步骤75(4)直度软件之操作步骤80 十八.Z轴直度镜组织架设方法85 十九.垂直度量测之操作89(1)垂直度镜组架设之步骤89(2)软件操作之步骤95 二十.平面度量测之原理与操作101(1)硬设备101(2)操作之原理102(3)镜组架设之步骤102(4)软件操作之步骤110RENISHAW 公司简介RENISHAW为一家英国公司,产品营销全世界,主要产品有三次元量床之测头、测针、BALLBAR循圆测试仪、镭射干涉仪・・・・・・・・等等及产品经NPL(英国国家标准)认证为ISO 9001之合格厂商RENISHAW公司为机器设备制造商提供量测检验系统的仪器,提供各种用于机器精度检定的量测设备进而改善机器的精度RENISHAW XL80 高性能镭射干涉仪是机床、三次元坐标量床及其它定位装置精度校准用的高性能仪器,由于最新电子技术的应用,使其镭射波长非常稳定并保持了低成本高效率的工作流程RENISHAW 产品介绍:镭射干涉仪量测系统循圆测试仪器(BALLBAR)量测系统三次元测头测针系列黏贴式光学尺系列镭射干涉仪量测原理MICHELSON E0 干涉原理两个频率振幅波长相同的镭射光波因相位变化而发生不同程度的干涉a.相长干涉(建设性干涉)b.相消干涉(破坏性干涉)相长干涉相消干涉1.波的速度V=fλ 若f,λ const . 则V const2.干涉量测原理3.镭射干涉仪:一般镭射干涉仪均为氦氖镭射,其镭射光为红色波长0.6329μm长期稳定误差0.05ppm以下(10个波长相差0.5个波)其优点:a.测量范围大b.简化以往光学仪器结构c.测量速度快缺点:易受大气环境影响因波长常会随温度、气压、湿度而变化(因镭射光以空气为传递介质)4.镭射干涉仪一般量测项目:(一)定位精度、距离量测、重复性(二)速度、加速度、动态量测(三)角度量测:a.垂直方向角度(pitch)b.水平方向角度(yaw)(四)真直度量测:a.垂直方向b.水平方向(五)直角度量测(六)平面度量测(七)平行度量测(八)旋转角度量测注意事项:(1)三脚架置于待测物适当位置,地基稳固不可摇晃及避免人员和机器碰触的地方(2)三脚架之水平气泡调至中央位置固定(3)信号线之插头,红点表示向上,各线接头缺口部份确实吻合方可插入(4)各电源线、信号线连接或拔除时,各仪器需均在OFF状态,否则会对仪器造成伤害(5)给予稳定独立电源,确实不漏电环境中使用(6)短距离量测(50mm内)亦产生余弦误差,先校直度再作定位(6)对焦时避免反射回来的镭射光打在镭射光射出口处(7)镭射先热机稳定后,再做镭射量测(8)操作中确认XC80(环境补偿系统)是监控中,每7秒各侦测一项,以42秒为一次循环(9)镭射干涉仪设备存放地点尽量保持干燥镭射干涉仪防止误差及保养1﹒镭射干涉仪防止误差(1)量测周围环境应尽量避免太阳光直接照射或突然流动的风产生扰流现象(2)装设干涉镜及反射镜在被测机台上时,必须牢固,否则机台移动会造成不可预期的量测误差(3)环境侦测感应器与材料温度感应器是否作动,必须于量测前确实检查,以免造成不必要的误差(4)要获得最佳精度并减少误差,建议遵守下列规定:a﹒在校验环境条件中执行量测b﹒激光束需作确实校直c﹒需注意量测时的周围条件d﹒牢固地装设镜组(3)在量测执行中不可因其它因素而中断,量测必须一次完成检验,若发生量测中断情形,必须重新执行检验2﹒镭射干涉仪保养方法(1)使用时应防止碰撞及震动(2)工作完毕应循操作方法反顺序逐一拆卸并且擦拭干净置回仪器盒内(3)金属平台在使用完后应擦拭干净(4)干涉镜及反射镜片应使用光学镜片专用擦拭纸做圆形回转擦拭(注意严禁使用酒精或具有挥化性及腐蚀性之清洁液擦拭,请干擦,因镜面有镀一层蓝色薄墨,而激光束是靠此薄墨产生折射与反射,如果使用具有挥化性或腐蚀性之清洁液会将此薄墨破坏,如果镜面没有薄墨折射率既减弱而影响光强,且无法再镀上此薄墨,请注意小心使用)(5)应小心搬运尤其对镜片类应有适当防护与防震,暂不用时以干净东西覆盖安全注意事项1.镭射光属二级镭射,建议勿长时间直视镭射光2.镭射预热时可将镭射光闸暂时关闭,镜组对焦时再予以打开3.对焦时尽量避免反射之镭射光打在镭射头的镭射发射出口处,以免镭射造成不良影响4.架设镜组前,先将机器欲测轴全行程来回移动,观察机器移动空间并决定镜组架设位置,当镜组架设至机台后,使用手动慢速移动机器确定移动空间无其它干涉物后,机器才可改为自动移动5.架设或操作镭射干涉仪时,闲杂人等避免靠近,以免拌到电源线或传输线6.确认电压伏特是否正确,并且所使用的电力来源尽量能够独立,并加稳压器.镭射光原理及特性1.光的相关原理光为一种无质量的微粒子(牛顿)光为一种电磁波(马克士威尔)光具有粒子与波动的性质2.光的特性方向性直线性波动性3.波的基本物理量频率f、周期T、振幅A、波长λ、其中波长是长度单位4.何谓镭射光对某种元素施予能量,使其原来稳定的基态(低能阶)变为不稳定的激态(高能阶),元素会由激态(高能阶)释放出能量后变回原来的基态(低能阶) 再释放能量的过程中会产生一种光,我们谓之镭射光5.镭射光之特性A.高单频性:光的频率即是色,高纯频率即是高单色,一般可见光包含红、澄、黄、绿、蓝、靛、紫、频率纯度较低B.高方向性:镭射光配合聚光镜的发散角度非常小,而一般光线其扩散角度都非常大C.高亮度性:其光线亮度比一般光线亮度大数倍(视镭射而定)硬件介绍XL80 镭射头XC80 环境补偿系统8XC80 环境补偿系统插槽示意图夹持器组线性定位量测镜组角度量测镜组Z轴直度量测镜组及附件垂直度量测镜平坦度量测镜组旋转轴量测系统镭射头微调平台重负荷三脚架镭射架设联机流程图1﹒镭射架设及量测流程表15定位量测原理及操作1﹒线性定位量测原理:(一)架设方式:干涉镜不动,移动反射镜反射镜不动,移动干涉镜(二)何谓线性定位精度:CNC机器执行时,程序之坐标点未必是机器的坐标点,程序坐标点为理想值,机器坐标点为实际值,两者之间差为机器的定位精度(三)线性定位误差原因:误差原因可能是导程误差、控制器误差、机器几何误差及震动等原因(四)线性定位量测的目的:量测出机台可能因零件和组装所造成的误差,可利用机器参数补偿或重新组装改进机器加工机精度,确保机器加工的质量(五)镭射干涉仪定位量测发生误差的原因:a﹒空气、温度、湿度、气压等影响b﹒待测物之热膨胀系数c﹒电子误差d﹒死径误差(图一)e﹒阿倍(ABBE)误差(图二)f﹒余弦(COS)误差(图三)g﹒震动误差h﹒镜组热膨胀飘移镭射干涉仪量测数据是以数值方式显示,并没有一般量测时有人为读值判定所产生的误差162﹒量测方式a﹒线性(linear)方式---单向---2次b﹒线性(linear)方式---双向---2次17C﹒朝圣(pilgrim)方式---单向---2次d﹒朝圣(pilgrim)方式---双向---2次18 e﹒钟摆(pendulum)方式---单向---2次f﹒钟摆(pendulum)方式---单向---2次镭射架设易发生之误差1﹒死径误差(如图一所示)˙死径误差是一种与使用XC80 自动补偿的线性量测过程中的环境因子变化有关的误差。
雷尼绍测头袖珍指南说明书
CNC 工具機測頭袖珍指南解決方案提升工件品質和精確度,提高 加工中心機的效率CNC 工具機測頭解決方案...袖珍指南內容本袖珍指南完整地介紹了 Renishaw 公司為 CNC 工具機而設計的主要產品,協助您加瞭解測頭量測可以為您帶來的營運效益。
“使用 Renishaw 公司提供的創新解決方案,可以縮短最多達90%的 設定時間”為什麼要使用測頭? 1使用 Renishaw 測頭量測系統的預期效益 3工件設定工件檢測刀具設定和破損刀具檢測功能強大的 PC-based 工件量測軟體支援巨集程式之測頭量測軟體產品/應用指南 5為什麼要使用測頭?時間就是金錢。
與其花時間人工手動設定工件位置和檢驗成品尺寸,不如將時間花在加工工作上。
Renishaw 測頭量測系統,可消除因手動設定及檢驗所造成的代價高昂的機器停機和工件報廢。
機器只有在持續生產良好品質的工件下,才是在創造利潤。
你有因停機而無法獲利的問題嗎?為什麼你大部分的機器會閒置達數小時?道理很簡單。
因為許多公司仍然使用人工手動方式來設定刀具和工件,並且使用機外檢驗的方式來進行加工成品尺寸之檢驗 — 兩者都是造成寶貴設備閒置的重要因素。
減少停機時間和廢品 — 增加機器加工時間和工件精度手動刀具設定、工件設定和檢測既耗時,又容易產生人為疏失。
直接在線上進行測頭量測,便不需要再使用外部的刀具設定儀、昂貴的夾治具和以槓桿千分錶進行手動設定。
線上測頭量測既快速且可靠,並且可以自動補正機械座標偏移量。
測頭量測軟體會自動對刀具長度和直徑、工件位置以及尺寸誤差進行補償。
Renishaw公司配備功能強大的套裝軟體,使用容易編輯的巨集程式進行刀具設定、工件設定和工件量測。
這些測頭量測循環程式,係依據工業標準格式編輯而成,可簡單地整合到加工程式中,並可使用標準機器程式代碼來呼叫使用。
Renishaw 公司的測頭普遍為世界各地的公司所採用,作為提升生產效率和改善工件品質的方法。
雷尼绍测头的应用

雷尼绍测头的应用1 绪论1.1 研究背景随着科技、生产的快速发展,测量技术日益显著。
而相当长的时间内,测量基本上是静态的,即测量对象在测量过程中不变化或没有明显变化,同时,测量大多是“离线”的,而不是“在线”的,即不是在生产制造过程中实现。
比如,对于生产,离线的静态测量只能对零部件和成品分别进行检测;而对生产加工的过程则无能为力。
如果能对生产制造过程加以检测,即进行所谓的“在线测量”,则不仅可以保证产品质量、增加产量,降低消耗、减少成本、提高效率,而且还可以随时监测甚至排除生产中的潜在问题,保证生产顺利进行。
国际上,上世纪60 年代后期开始,在机测量技术便引起了人们的关注。
这一方面是由于科技、生产和社会发展的需要,尤其是质量和效益的挑战;另一方面则是由于传感器技术、微型计算机技术、自动控制技术和图像识别技术等的进展,为在机测量的实现提供了必要的条件。
1974 年召开的第一次在机测量国际会议,进一步引起了全世界各国的普遍关注,对在机测量技术的开发与应用起了有力作用。
近年来,基于接触式、非接触式等各种测头的在机测量技术在现代工业领域被广泛应用。
触发式测头在国外发展较早,技术也都相对成熟,测头的位置坐标主要通过加工设备的控制系统存储,其精度主要取决于加工设备的定位精度。
因此,为了得到较高的测量精度,国内外的研究大多都是采用国外的数控系统和加工设备,比如:FANUC 数控系统等而随着国内加工设备的精度提升,此次采用北京精雕控制系统及其北京精雕高速雕刻中心来完成测头的在机测量研究。
对于非接触式测量方式,激光扫描法相对成熟,比如国外大多采用FANUC 数控加工中心上配激光测头,使其附加了数控测量功能,实现了三轴机床上的在机测量。
随着加工技术的飞速发展,数控机床在生产中的应用越来越广泛。
虽然机床按程序执行,但加工时间短,效率高,但工件对准、检查等辅助加工时间没有缩短,甚至占整个加工过程的1/3 以上。
面对这些问题,使用Renishaw 探头不仅避免了重复编程,节省了编程和调试时间,还具有机器测量功能,保证了机床生产和操作的可靠性,保证了产品加工尺寸精度。
雷尼绍CNC探头编程步骤 V01
雷尼绍CNC探头编程步骤 V01一、探头介绍雷尼绍CNC探头(Renishaw CNC Touch Probe)作为一种用于CNC机床上的高精度测量设备,被广泛应用于雕铣、车铣等数控加工领域。
它可以在工作中快速地检验工件的位置和尺寸,从而使得加工过程更加精确和高效。
这种探头通常由两部分组成:探针本体和接口。
探针本体皆为高精度的零件,需要按照操作手册的要求进行使用和保养。
接口则通常有直插式和线性式两种,根据不同设备的要求进行选择。
二、探头编程步骤下面将对雷尼绍CNC探头的编程步骤做一个简单的介绍。
2.1 准备工作在进行探头编程前,需要进行准备工作:•确定探头的型号和接口类型,确保探头适用于当前设备;•将探头安装在机床上,并进行相关的校准和调试工作;•确定探头的标定值和坐标系。
2.2 安装G31指令在进行探头编程时,需要先安装G31指令,以便探头的信号可以被读取。
一般情况下,G31指令通常可以在机床的NC程序中找到,需要进行相应的设置和参数调整。
2.3 探头接触点坐标计算计算探头接触点坐标通常有两种方法:基准坐标系和刀具坐标系。
1.基准坐标系方式在基准坐标系方式中,探头接触点的坐标值是相对基准点来计算的。
具体步骤如下:•将探头移动到基准点,记录此时机床的坐标值;•移动探头到工件上方并下降到接触点,记录此时机床的坐标值;•计算探头接触点的坐标值,用于编写探头程序。
2.刀具坐标系方式在刀具坐标系方式中,探头接触点的坐标值是相对于工件的参考点和刀具的位置来计算的。
具体步骤如下:•将刀具移动到指定的参考点,并记录此时的机床坐标值;•将刀具移动到探头接触点上方并下降,记录此时的机床坐标值;•结合参考点和刀具位置的坐标值,计算探头接触点的坐标值。
2.4 编写探头程序完成探头接触点坐标的计算后,就可以编写探头程序。
一般情况下,探头程序可以用G31指令来实现,要求探头接触点坐标值以及各种调用探头的条件都要清晰明了。
雷尼绍激光干涉仪产品简介
apply innovationRENISHAW雷尼绍 XL-80 激光测量系统 • Renishaw简介 • 激光的介绍 • 激光干涉仪系统组件 • 雷尼绍激光干涉仪的测试原理 • 测量规格 • 典型案例分析 • 荣誉客户apply innovationRENISHAW简介• 雷尼绍公司在计量学和拉曼光谱仪器领域居世界领先地位。
总 部 (Renishaw plc) 位于英国伦敦西部的格劳斯特郡(Gloucestershire)。
她是一家 跨国公司,在世界各地有14家子公司。
中国大陆的业务由雷尼绍(香港)有限公司 归口负责。
• 30多年来,Renishaw一直是计量、即测量科学领域的创新者,实现了按照国际标准 进行测量。
在计量、运动控制、机器校准、牙科CAD/CAM及光谱学领域,Renishaw以 创新产品提高精度、效率和质量 • 机床测量和校准用的激光干涉仪和球感仪系统;高精度定位反馈编码器系统-servo 代理apply innovation基本概念 – 激光– 激光头输出的光束是正弦波的激光. 激光的波长是633nm 在雷尼绍XL-80激光 测试系统中。
Wavelength– 激光有以下3个重要特性: • 激光的波长是精确已知的可以被应用于高精度测量 • 激光的波长很短可以应用于高分辨率的测量 • 激光的相位是一致的,空间相干性apply innovationXL-80 系统组件XC-80USB - one sensor reading update every 7 secsXL-80LaserXLUSB - 50kHz fringe count data and statusNotebook PCQuickView XLapply innovationXL-80激光头性能指标系统精度(整个工作范围)±0.5ppm (0~40 ℃) 0.05ppm 0.001 um 4.0m/sec 50KHz 0 - 80 metres(在长距光学镜配合下)激光稳频精度 分辨率 最大测量速度 最高采样频率 测量范围 预热时间更短 激光信号强度指示灯~5分钟专利技术ABCDHapply innovationXL-80激光头性能指标• 外接电源• USB接口– Mini-USB 端口 – 标准USB电缆• DIP开关 & 辅助I/O端口– – – – 遥控触发 正交输出 模拟信号输出 长距离接收apply innovationXC-80补偿单元和传感器“智能”化传感器设计 • 通过RS485传送数字信号 • 可更换的传感器电缆 • 更快的刷新频率,每隔7秒 • 更紧凑的电缆接头设计 • 自降温设计空气湿度 空气压力精度: ±1.0 mbar 精度: ±6%空气温度精度: ±0.2 °C材料温度精度: ±0.1 °Capply innovationXC-80补偿单元和传感器• 激光的波长取决于光路中介质的折射率,空气折射率受环境的温度 、空气压力、相对湿度、材料温度等因素影响,所以renishaw开发 了XC-80补偿单元。
雷尼绍数控车床对刀仪的用途及设置

雷尼绍数控车床对刀仪的用途及设置雷尼绍数控车床对刀仪是一种用于数控车床上的加工设备。
它可以帮助加工人员在加工过程中快速精准地定位工件和刀具,提高加工效率和加工质量。
本文将详细介绍雷尼绍数控车床对刀仪的用途及设置方法。
一、雷尼绍数控车床对刀仪的用途1.快速定位工件在数控车床加工过程中,加工人员需要将工件准确定位到加工平台上,并将刀具对准工件进行加工。
使用雷尼绍数控车床对刀仪可以使这个过程更加轻松快捷。
只需要将对刀仪放在工件上,通过调整对刀仪的位置和刀具的高度,就可以准确地定位工件和刀具。
2.节省加工时间在传统的加工方式中,加工人员需要通过手动试刀或者使用其他设备进行对刀调整。
这个过程比较费时费力,并且很难达到完美的对刀效果。
而使用雷尼绍数控车床对刀仪可以节省大量的对刀时间,提高加工效率。
3.保证加工质量对刀的准确性对整个加工过程的质量和精度有着非常重要的影响。
使用雷尼绍数控车床对刀仪可以精准地调整刀具位置和高度,保证了加工质量和加工精度。
二、雷尼绍数控车床对刀仪的设置方法1.连接对刀仪首先需要将对刀仪安装到数控车床上,并且与控制系统进行连接。
连接成功后,我们可以开始进行对刀调整。
2.选择对刀方式雷尼绍数控车床对刀仪有两种对刀方式,分别是机械式对刀和光电式对刀。
机械式对刀需要使用刀具和工件进行接触,而光电式对刀则是通过激光进行测量。
根据不同的加工需求选择合适的对刀方式。
3.调整对刀仪位置将对刀仪移动到要加工的工件附近,调整位置使其与工件紧密贴合。
注意不要碰到工件,否则会影响对刀的准确性。
4.调整刀具高度将刀具按照需要插入刀杆,然后将刀杆插入可调高度的杆座中。
使用对刀仪的调节装置,调整刀具的高度使其与工件接触,然后调整到合适的位置。
5.校准参数将调节好的刀具高度输入数控系统中。
然后进行参数校准,检测参数是否正确。
如果参数正确,可以开始进行加工操作。
通过以上步骤,我们可以轻松地完成对刀操作,并且可以保证加工的精度和质量。
雷尼绍CNC探头编程步骤V0001

雷尼绍探头使用介绍第一章探头程序编程第一节编探点程序1. 定原点,找各探点坐标值先在UG 软件里定好工件坐标系原点,然后用 UG 软件将需要探点的位 置的点(X Y Z )找出来,记录下来,以编探点程序用。
2. 编探点程序(探点程序的名字自己定如:06666探点程序里面控制探头的移动需要调用两个重要的探头运算程序09810和09811探点程序格式案例:(以下是编探Z 点的案例)%O6666(PROBE)G91G28Z0G90 GO G17 G40 G49 G69 G80(探头装在T11刀座上,换T11号探头到主轴上) (快速定位到到G54坐标系中的要探点的第一个点上方) 主轴定位,S 是让主轴转一个角度,如果是探 Z 轴方向的点, 就不需要,如果是探侧面,就需要 S ,即转角度,使探头在探各侧面时都是使用探针红宝石球的一个面测量,减小M05(打开探头,这个指令是由接线时接到相应端口决定的) (建立刀长,即读取探头的长度) (探头快速下到Z50.的位置) (测第一个点的Z 值) (安全快速定位到第一个点的X Y 位置,速度为F3000.) (安全快速定位到 第一个点上方的安全的Z 位置,速度同 上,此处高度一般离下面要测的点 3MM(安全慢速到达 第一个探点 的Z 位置,另外,此步探完点后,会自动的返回到上一步 Z19.0的位置) (#142为第一个探点 的理论Z16.08与实际探得的“ Z 实”的差 值, 它是在O9811里面自动计算,然后传递给 #142,#142再将所得的值传递给#601,#601为第一个点Z 向要补尝的值) (安全快速移到安全高度Z20.的位置)(测第二个点的Z 值)(安全快速定位到 第二个点的X Y 位置,速度为F3000.) (安全快速定位到 第二个点上方的安全的Z 位置,速度同 上,此处高度一般离下面要测的点 3MM M6 T11G90 G00 G54 X-18. Y50.M19 (S_ )( S M17 (open probe)G43 Z50.H11G90G00Z50.N1(Z+ POINT1) G65P9810 X-18. Y50. F3000. G65P9810 Z19. G65P9811 Z16.08#601=#142 G65P9810 Z20.N2(Z+ POINT1) G65P9810 X-16.5 Y48.3 F3000. G65P9810 Z17.N16(Z+ POINT1)G65P9810 X-16.5 Y-18.2 F3000.G65P9810 Z16.G65P9811 Z14.23#616=#142G65P9810 Z35.IF[ABS[#6O1]GT#62O]GOTO2OIF[ABS[#6O2]GT#62O]GOTO2OIF[ABS[#6O3]GT#62O]GOTO2OM18G91G28Z0M99N20 #3000=99 point cuo wu Z OUT OF TOL (报警提示,Z 超公差,此处“ #3000= ”后面 可以为自己设定0-200另加的提示信息)G91G28Z0M99 第二节编辑加工程序将各探点对应的补尝值变量(#601 #602 #603…… )加到加工程序里面对应 G65P9811 Z14.23#602=#142 #142 G65P9810 Z35.N3(Z+ P0INT1)G65P9810 X12.5 Y51.1 F3000.G65P9810 Z19.G65P9811 Z16.08#603=#142G65P9810 Z20.N4(Z+ POINT1)G65P9810 X12.2 Y49.2 F3000.G65P9810 Z16.G65P9811 Z13.73#604=#142G65P9810 Z35. (安全慢速到达 第二个探点 的Z 位置,另外,此步探完点后, 会自动的返回到上一步 Z19.0的位置) 为第二个探点的理论Z16.08与实际探得的“ Z 实”的差值,它是在0981俚面自动计算,然后传递给 #142,#142 再将所得的值传递给#601,#601为第二个点Z 向要补尝的值) 安全快速移到安全高度Z20.的位置) (测第三个点的Z 值) (测第四个点的Z 值)(测第十六个点的Z 值) #620=0.1 (设定公差为0.1,赋值给#620)(下面是对各探测的点的差值Z 设定公差范围,超过了公差即跳转到N20处执行) (如果#601的绝对值大于#620的值,即跳转到N20处执行)(如果#602的绝对值大于#620的值,即跳转到N20处执行)(如果#603的绝对值大于#620的值,即跳转到N20处执行)的点的坐标处。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
J
K
#5
#6
U
V
#21
#22
#32
#33
* 不允许作为输入地址使用
系统变量
变量 #2001 to #2299 #10001 to #10512 #5061 #5062 #5063 #5201, #5202, #5203 to #5208 #5221, #5222, #5223 to #5228 #5241, #5242, #5243 to #5248 #5261, #5262, #5263 to #5268 #5281, #5282, #5283 to #5288 #5301, #5302, #5303 to #5308 #5321, #5322, #5323 to #5328 #5001, #5002, #5003 to #5008 描述 Tool offsets Tool offsets option Probe skip position X Y Z External work offset G54 work offset G55 work offset G56 work offset G57 work offset G58 work offset G59 work offset End block point
Green-Point Training
• • • • • 雷尼绍工件测头OMP40-2,OMI在FANUC机床上的安装 雷尼绍程序说明 雷尼绍测头校准 宏变量 宏程序分析说明
4/20/2016
Slide 1
OMP40-2和OMI
4/20/2016
Slide 2
硬件安装说明
一.工件测头与刀柄及探针的组装 1)将测头装入刀柄,拧紧刀柄上2固定螺丝 2)将电池及测针装在测头上 3)将测头装入主轴,用千分表打测针球中心(0.005) 具体通过调整刀柄上4个方向的螺丝来确定球中心 二.接受器OMI安装 1)装上支架 2)套上保护管 3)将接受器固定在机床某个位置,使接受器对 准主轴方向,确保其传输良好
更多系统变量
变量 #5021, #5022, #5023 to #5040 描述 Current position
#5041, #5042, #5043 to #5080
#5081 #5082 #5083
Current work offset position
Current tool offset value
4/20/2016
Slide 15
四点测量圆柱,孔等O9814
• • • • 调用格式:[ ]为选择输入 G65 P9814 Dd [ Ee Ff Hh Mm Qq Rr Ss Tt Uu Vv Ww ]或者 G65 P9814 Dd Zz [ Ee Ff Hh Mm Qq Rr Ss Tt Uu Vv Ww ] D为测量直径,Z为测量圆柱时的Z轴绝对位置
Slide 4
测头的校准,举例环规标定
• 根据测头相应刀号编写标定程序,假设测头为1号刀使用1号刀补环规直径50MM,环规中心在G54坐标系 下,程序名O8000 • O8000 • T01M6(选择测头刀号) • M19(主轴定位) • G90G80G40G0(初始指令) • G54X35.Y0 • G43H01Z200.(使01号刀补生效,测头定位在200MM上方) • M??(测头打开M代码) • G65P9810Z30.F3000(保护移动) • G65P9801Z0.T01(在环规顶面标定探针长度) • G65P9810X0Y0 • G65P9810Z-7. • G65P9802D50.(在直径50的孔内标定探针球在X,Y的偏心 ) • G65P9803D50.0 (在直径50的孔内标定探针球在X,Y的半径) • G65P9810Z100.F3000 • M??(测头关闭M代码) • G91G28Z0(主轴台到参考点) • M30(程序结束)
#10001 to #10099
#15001 to #15099
X axis tool wear offset
X axis tool geometry offset
#11001 to #11099
#16001 to #16099 #12001 to #12099
Z axis tool wear offset
4/20/2016
Slide 5
本地变量
• 地址 A B C D E F G* H I 变量 #1 #2 #3 #7 #8 #9 #10 #11 #4 地址 L* M N* O* P* Q R S T 变量 #12 #13 #14 #15 #16 #17 #18 #19 #20 地址 W X Y Z 变量 #23 #24 #25 #26 #27 #28 #29 #30 #31
4/20/20169802
• 调用格式:[ ]为选择输入 • G65P9802D_ [ Z_ ],D测量尺寸,Z外部轮廓Z轴测量点的绝对坐标. • 输出:#502,#503
X,Y半径O9803
• 调用格式:[ ]为选择输入 • G65P9803D_ [ Z_ S_],D测量尺寸,Z外部轮廓Z轴测量点的绝对坐标. • 输出:#500,#501
矢量标定,X,Y半径及矢量半径O9804
• • • • 调用格式:[ ]为选择输入 G65P9804D_ [ Z_ S_],D测量尺寸,Z外部轮廓Z轴测量点的绝对坐标. 输出:#500,#501 矢量输出#510~#517
单面测量O9811
• 调用格式:[ ]为选择输入 • G65P9811X_/Y_/Z_ [ Ee Ff Hh Mm Qq Ss Tt Uu Vv Ww ],X,Y,Z表面 位置或尺寸,F进给.
Y axis tool wear offset
Y axis tool geometry offset
保护移动O9810
• 调用格式:[ ]为选择输入 • G65P9810X_Y_Z_ [ F_M_ ],X,Y,Z坐标,F进给,M测头触发标志
测量探针长度O9801
• 调用格式:[ ]为选择输入 • G65P9801Z_T_ Z参考面位置,T有效刀具补偿号
Z axis tool geometry offset Tool nose wear offset
#17001 to #17099
#13001 to #13099
Tool nose geometry offset
Tool point vector
#14001 to #14099
#19001 to #19099
两点凸台,凹槽测量O9812
• • • • • • • 调用格式:[ ]为选择输入 G65P9812 Xx [ Ee Ff Hh Mm Qq Rr Ss Tt Uu Vv Ww ] G65 P9812 Yy [ Ee Ff Hh Mm Qq Rr Ss Tt Uu Vv Ww ] G65 P9812 Xx Zz [ Ee Ff Hh Mm Qq Rr Ss Tt Uu Vv Ww ] G65 P9812 Yy Zz [ Ee Ff Hh Mm Qq Rr Ss Tt Uu Vv Ww ] X,Y测量时的正常尺寸 Z测量时Z轴绝对位置
4/20/2016
Slide 3
功能检验
1.选择测头功能模式(模式选择参考手册) 2.在机床上选择测头打开M代码,运行启动,检查测头是否正常打开 3.在测头打开的情况下,在MDI方式下键入”G91G31X_F20”按下启动按钮, 让机床缓慢移动,此时用手触碰测针,如果X轴停止,说明跳跃信号正确
4/20/2016