三坐标测量机技术协议
(完整版)三坐标技术协议

三坐标测量机技术协议甲方:xxxxxxxxxxx有限公司合同编号:FBGTHZ-SB20140512乙方:xxxxxxxxxxx有限公司(代理方)乙方授权方:xxxxxxxxxxx有限公司有限公司甲方就购买乙方的AtlasB256018龙门式坐标测量机经多次技术交流后达成共识,签订本技术协议,双方共同遵照执行。
一、配置清单二、技术描述三、安装调试四、验收五、培训六、服务一、配置清单二、技术描述(一)主机描述采用国际先进的有限元分析设计方法,使其具有机械结构刚性强、偏差小,具有高精度、高性能和高稳定性的优点。
●机械主体结构采用双边固定立柱、双边高架导轨、横梁移动式结构,结构简单、开敞的结构、移动重量轻,运动性能好。
●工作台采用地基平面,具有承载能力强、装卸空间宽阔、便捷。
●Y向导轨以天然花岗岩作基础,采用上燕尾式,定位精度高,动态几何误差小、稳定性能好。
●Y向采用国际最先进的海德汉光栅尺、双光栅、双驱动技术,可实现双全闭环、双反馈回路,极大地提高了Y向导轨的定位精度及运行速度。
●宽温度特性设计,使其具备良好温度适应性、抗实效变形能力,适应车间环境下的安全操作。
●三轴均采用自洁式预载荷高精度空气轴承组成的静压气浮式导轨,轴承跨距大,抗角摆能力强,阻力小、无磨损、运动更平稳。
●驱动系统采用齿轮齿条传动装置,确保传动更快捷、更精准。
●Z轴采用平衡装置,提高了Z轴的定位精度及稳定性。
●22项机械几何误差补偿技术的运用,极大地提高了机器精度。
●控制系统采用国际知名品牌的高性能三坐标专用控制系统,可靠性好。
●软件采用具有独立知识产权的、功能强大的AC-DMIS测量软件包,其完善的测量功能和联机功能,为用户提供了完美的测量解决方案。
●光栅尺的安装方式为::在导轨上安装一钢质基座,光栅尺安装于基座内,一端固定一端自由,可避免光栅尺与导轨材料不同引起的膨胀不同,以及保证光栅的自由伸缩,保证长期的精度稳定性和光栅尺寿命。
爱德华三坐标技术协议
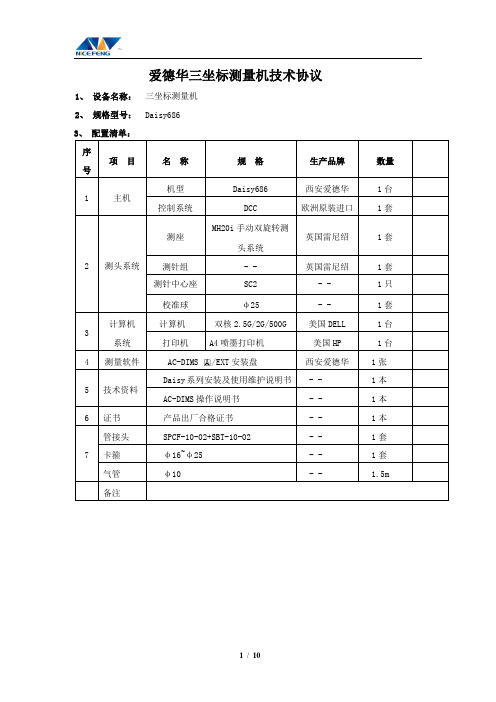
爱德华三坐标测量机技术协议1、设备名称:三坐标测量机2、规格型号:Daisy6863、配置清单:序号项目名称规格生产品牌数量1 主机机型Daisy686 西安爱德华1台控制系统DCC 欧洲原装进口1套2 测头系统测座MH20i手动双旋转测头系统英国雷尼绍1套测针组- - 英国雷尼绍1套测针中心座SC2 - - 1只校准球φ25 - - 1套3计算机系统计算机双核2.5G/2G/500G 美国DELL 1台打印机A4喷墨打印机美国HP 1台4 测量软件AC-DIMS □A/EXT安装盘西安爱德华1张5 技术资料Daisy系列安装及使用维护说明书- - 1本AC-DIMS操作说明书- - 1本6 证书产品出厂合格证书- - 1本7 管接头SPCF-10-02+SBT-10-02 - - 1套卡箍φ16~φ25 - - 1套气管φ10 - - 1.5m 备注4.2、性能指标:01、测头系统:RENISHAW MH20i手动双旋转可分度测头系统技术参数:TP20测力模块一个测头座分度机构:绕 A轴(水平轴)范围 0°~90°最小步距15°绕B轴(铅垂轴)范围±180°最小步距15°02、测针组:测针(mm):订货号型号材料测球直径长度杆直径有效长度数量(根)验收结果A-5003-0033 PS48R 红宝石测球/碳化钨杆 1 20 0.8 12.5 1A-5000-3603 PS2R 红宝石测球/不锈钢杆 2 20 1.4 14 1A-5000-4160 PS16R 红宝石测球/不锈钢杆 3 20 1.5 17.5 1A-5000-4161 PS17R 红宝石测球/不锈钢杆 4 20 1.5 20 1A-5000-7807 PS8R 红宝石测球/不锈钢杆 2 10 1 6 4A-5000-3604 PS1R 红宝石测球/不锈钢杆 3 10 1.5 7.5 1订货号型号材料直径长度数量(根)M-5000-7634 SE7 不锈钢杆 3 5 1M-5000-3647 SE4 不锈钢杆 3 10 1M-5000-3648 SE5 不锈钢杆 3 20 1M-5000-4162 SE6 不锈钢杆 3 30 1订货号型号材料中心尺寸有效长度数量(个)A-5000-3627 SC2 不锈钢杆7 7.5 1 03:校准器:标准球Φ25及万向球座T504:精度指标:长度计量系统:英国进口精密光栅尺分辨率:0.5μm;测量范围X×Y×Z: 600mm×800mm×600mm示值误差:MPEE≤2.4+L/300μm探测误差:MPEP≤2.4 m4.3、环境要求(详情见附件《三坐标测量机安装使用环境技术要求自检表》)01、温度:20±2℃ 1℃/h 1℃/m 2℃/24h02、湿度:40%-70%03、电源:220V±10%, 50HZ-60HZ04、气源:≥0.55MPa4.4、控制系统: DCC 控制器是德国MORA Metrology GmbH公司高性价比的运动控制器,能够广泛适用于各种工况的高性能、高可靠性的运动控制解决方案。
三坐标服务费合同模板
三坐标服务费合同模板甲方(委托方):_____________乙方(服务方):_____________鉴于甲方需要对产品进行三坐标测量服务,乙方具备相应的测量技术和设备,双方本着平等自愿、互利互惠的原则,经协商一致,订立本合同,以资共同遵守。
第一条服务内容乙方应按照甲方的要求,提供以下三坐标测量服务:1. 产品尺寸测量;2. 产品形状和位置精度检测;3. 出具测量报告。
第二条服务标准乙方提供的三坐标测量服务应符合国家或行业相关标准,并满足甲方的具体技术要求。
第三条服务期限本合同服务期限自____年____月____日起至____年____月____日止。
第四条服务费用及支付方式1. 服务费用总计为人民币(大写):__________元整(¥__________)。
2. 甲方应在合同签订之日起____个工作日内支付总服务费用的____%作为预付款。
3. 乙方完成服务并经甲方验收合格后,甲方应在____个工作日内支付剩余服务费用。
第五条甲方的权利和义务1. 甲方有权要求乙方按照合同约定提供服务。
2. 甲方应按照约定及时支付服务费用。
3. 甲方应提供必要的技术资料和工作条件,以保证乙方顺利开展服务工作。
第六条乙方的权利和义务1. 乙方有权按照合同约定收取服务费用。
2. 乙方应按照甲方的要求和国家或行业标准提供服务。
3. 乙方应保证测量结果的准确性和可靠性。
第七条违约责任1. 如甲方未按约定支付服务费用,应按未付款项的____%向乙方支付违约金。
2. 如乙方未按约定提供服务或服务不符合约定标准,应承担相应的违约责任。
第八条合同变更和解除1. 合同一经双方签字盖章,未经双方协商一致,任何一方不得擅自变更或解除合同。
2. 因不可抗力导致合同无法履行的,双方可协商变更或解除合同。
第九条争议解决合同履行过程中发生的争议,双方应首先通过协商解决;协商不成的,可提交乙方所在地人民法院诉讼解决。
第十条其他本合同一式两份,甲乙双方各执一份,具有同等法律效力。
三坐标检测合同范本

三坐标检测合同范本甲方(委托方):单位名称:法定代表人:地址:联系电话:乙方(检测方):单位名称:法定代表人:地址:联系电话:一、检测服务内容1. 甲方委托乙方对[具体产品或零部件名称]进行三坐标检测,检测项目包括但不限于[详细列出检测项目]。
2. 乙方应按照相关标准和规范进行检测,并出具准确、可靠的检测报告。
二、检测期限1. 乙方应在收到甲方送检样品后的[具体期限]内完成检测工作,并交付检测报告。
2. 如因特殊情况需要延长检测期限,乙方应提前通知甲方,并征得甲方同意。
三、检测费用及支付方式1. 检测费用为人民币[具体金额]元(大写:[金额大写])。
2. 支付方式:甲方应在乙方交付检测报告后的[具体期限]内,一次性支付检测费用至乙方指定账户。
3. 乙方应提供合法有效的发票。
四、双方权利与义务甲方权利与义务:1. 提供符合检测要求的产品或零部件,并确保其真实性和完整性。
2. 按时支付检测费用。
3. 有权对检测过程进行监督,但不得干扰乙方的正常检测工作。
4. 对检测结果如有异议,应在收到检测报告后的[具体期限]内向乙方提出书面申诉。
乙方权利与义务:1. 按照约定的检测标准和规范进行检测,确保检测结果的准确性和可靠性。
2. 保守甲方的商业秘密,不得泄露检测过程中的相关信息。
3. 按时交付检测报告,并对报告内容负责。
4. 如因乙方原因导致检测结果不准确或延误检测期限,应承担相应的责任。
五、保密条款双方应对在本合同履行过程中知悉的对方商业秘密、技术秘密等予以保密,未经对方书面同意,不得向任何第三方披露。
六、违约责任1. 若甲方未按时支付检测费用,每逾期一日,应按照未支付金额的[具体比例]向乙方支付违约金。
2. 若乙方未按时完成检测工作或交付检测报告,每逾期一日,应按照检测费用的[具体比例]向甲方支付违约金。
3. 如因一方违约给对方造成损失的,违约方应承担赔偿责任。
七、争议解决本合同的履行过程中如发生争议,双方应友好协商解决;协商不成的,任何一方均可向有管辖权的人民法院提起诉讼。
测量仪表技术协议书范文范本

测量仪表技术协议书范文范本甲方(委托方):_____________________地址:_____________________________法定代表人:______________________乙方(受托方):_____________________地址:_____________________________法定代表人:______________________鉴于甲方需要对特定测量仪表进行技术评估和性能测试,乙方具备相应的专业能力和资质,双方本着平等互利的原则,就测量仪表的技术要求、测试标准、服务内容等事项达成如下协议:第一条技术要求1.1 乙方应根据甲方提供的技术参数和性能指标,对测量仪表进行技术评估。
1.2 测量仪表的技术参数和性能指标应符合以下标准:____________________________。
1.3 乙方应保证所提供的测量仪表满足甲方的业务需求和相关法律法规的要求。
第二条测试标准2.1 乙方应按照国家或行业标准对测量仪表进行性能测试。
2.2 测试标准包括但不限于:____________________________。
2.3 乙方应提供详细的测试报告,报告中应包含测试结果、分析数据和改进建议。
第三条服务内容3.1 乙方应提供以下服务:____________________________。
3.2 服务内容应包括但不限于测量仪表的安装、调试、维护和技术支持。
3.3 乙方应保证服务的及时性和专业性,确保测量仪表的正常运行。
第四条保密条款4.1 双方应对在合作过程中获知的对方商业秘密和技术秘密负有保密义务。
4.2 保密期限为协议终止后____年。
4.3 违反保密义务的一方应承担相应的法律责任。
第五条违约责任5.1 如一方违反本协议的任何条款,应向对方支付违约金,违约金的数额为违约行为给对方造成的直接经济损失。
5.2 违约金不足以弥补损失的,违约方还应赔偿对方的实际损失。
三坐标测量机技术协议要点
三坐标测量机技术协议要点一、技术指标在协议中需要明确三坐标测量机的技术指标,包括测量精度、测量范围、重复精度等。
测量精度指测量结果与实际值之间的误差大小;测量范围指三坐标测量机能够测量的空间范围;重复精度指三坐标测量机在多次测量中的结果稳定性。
技术指标的明确有助于保证测量结果的准确性和可靠性。
二、设备配置协议中应详细列出三坐标测量机的设备配置,包括主机型号、控制软件、测量头、工作台等。
设备配置的明确有助于保证所购买的设备与规划的测量任务相匹配,确保测量的顺利进行。
三、价格和支付方式协议中需要明确设备的价格以及支付方式。
价格应包括设备本身的费用以及配套设备和软件的费用。
支付方式可以分期付款或者一次性付款,协议中需明确双方同意的支付方式。
四、售后服务协议中需明确售后服务的内容和责任。
售后服务包括设备的安装、调试、培训、维护等。
协议中应明确售后服务的时间、地点、方式以及对应的费用(如有)。
五、保修期协议中应明确设备的保修期,即在设备出现问题时,售货方承担的维修责任。
保修期一般为一年,协议中需明确保修期的具体要求和期限。
六、违约责任协议中应明确双方违约责任和处罚措施。
违约责任一般包括赔偿金、合同解除等。
协议中需明确违约责任的范围和解决方式。
七、协议解决协议中应明确争议解决的方式。
一般可以选择诉讼解决或者仲裁解决。
协议中需明确双方达成一致的解决方式。
八、保密条款协议中需明确保密条款,即关于双方涉及商业机密和技术机密的保护责任和义务。
协议中需明确保密内容、保密期限、泄密责任等。
九、其他条款根据实际情况,协议中还可以包括其他条款,如知识产权、协议变更等。
总之,三坐标测量机技术协议要点需要明确技术指标、设备配置、价格和支付方式、售后服务、保修期、违约责任、协议解决、保密条款以及其他条款等内容,以确保双方在三坐标测量机交易中的权益得到保障。
三坐标测量机保养与校准合同
三坐标测量机保养与校准合同甲方(设备使用方):____________________地址:____________________联系电话:____________________法定代表人:____________________乙方(保养与校准服务提供方):____________________地址:____________________联系电话:____________________法定代表人:____________________甲乙双方经友好协商,就乙方为甲方提供三坐标测量机的保养与校准服务达成如下协议:一、服务内容1.保养服务:定期检查和维护三坐标测量机,包括但不限于清洁、润滑、调整、更换磨损部件等。
检查并确保测量机各部件的性能和精度。
提供必要的保养记录和报告。
2.校准服务:按照国家和国际标准(如ISO 10360等)对三坐标测量机进行校准。
使用标准件和校准工具,确保测量机的精度符合要求。
提供校准证书和详细的校准报告。
二、服务期限合同期限:自______年____月____日起至______年____月____日止。
保养频率:每____个月一次(或根据甲方需求调整)。
校准频率:每____年一次(或根据甲方需求调整)。
三、服务费用保养费用:每次保养费用为人民币______元(大写:____________________元整)校准费用:每次校准费用为人民币______元(大写:____________________元整)支付方式:甲方应在每月____日前支付上个月的保养和校准费用。
四、服务流程1.预约:甲方应提前____天预约保养和校准服务。
2.服务过程:乙方技术人员到达现场后,首先与甲方沟通设备使用情况,然后进行保养和校准。
乙方应使用专业工具和方法,确保服务质量。
3.报告与反馈:乙方应在服务完成后____天内提供详细的保养报告和校准证书。
甲方有权对服务质量进行反馈,乙方应及时回应并采取必要措施。
爱德华三坐标技术协议

爱德华三坐标测量机技术协议1、设备名称:三坐标测量机2、规格型号:Daisy6864.2、性能指标:01、测头系统:RENISHAW MH20i手动双旋转可分度测头系统技术参数:TP20测力模块一个测头座分度机构:绕A轴(水平轴)围0°~90°最小步距15°绕B轴(铅垂轴)围±180°最小步距15°02、测针组:测针(mm):03:校准器:标准球Φ25及万向球座T504:精度指标:长度计量系统:英国进口精密光栅尺分辨率:0.5μm;测量围X×Y×Z: 600mm×800mm×600mm示值误差:MPEE≤2.4+L/300μm探测误差:MPEP≤2.4μm4.3、环境要求(详情见附件《三坐标测量机安装使用环境技术要求自检表》)01、温度:20±2℃1℃/h 1℃/m 2℃/24h02、湿度:40%-70%03、电源:220V±10%, 50HZ-60HZ04、气源:≥0.55MPa4.4、控制系统:DCC 控制器是德国MORA Metrology GmbH公司高性价比的运动控制器,能够广泛适用于各种工况的高性能、高可靠性的运动控制解决方案。
●DCC控制器采用国际先进的上、下位机式的双计算机控制系统,利用控制层和应用层独立运行的原理,使得测量机(CMM)的测量效率、精度和稳定性等功能极提高;●DCC控制器部的控制单元、伺服单元、接口板和CPU主板紧凑的整合在一个机箱,减少了控制系统的外部连线,保证了系统的可靠稳定性;●控制器部采用先进的连续运动轨迹插补算法,可进行测量轨迹的优化整合,自动生成合理的测量运动轨迹;●控制系统采用多种控制模式,提供多种安全保障功能,增加了安全可靠性。
当有意外发生时,控制器则能够在极短时间切换到相应的安全模式,并诊断出故障原因;●驱动系统采用直流伺服电机驱动,可使电机按照T曲线速度或S曲线速度运动,确保机器运动状态保持平稳;●控制器部具有温度监控系统,可避免因欠压、欠流等情况下发热高而引起的故障;●此类控制器提供TCP/IP,RS232等多种通讯方式,以便于控制系统与计算机连接或和其它外围设备连接;●与控制器相匹配的操纵杆,具有12个自定义功能键,同时具有根据操作者相对机器不同位置进行操作方向设置的功能键,使应用起来更加方便;●每种规格型号的控制器具有多种备选插口,可以极满足客户需求;●此类控制器具有超强的抗电磁干扰能力;●同时此类控制器支持触发式、扫描式、线激光式、光学影象等多种测量方式,可以满足不同测量机测量目的所需;●此类控制器可支持与加工机床的通讯连接,并具有机床运作时所需的G代码和M代码功能。
三坐标维修合同范本
三坐标维修合同范本甲方(维修方):________________乙方(委托方):________________鉴于甲方具备专业的三坐标测量机维修技术及经验,乙方因三坐标测量机出现故障,需要甲方提供维修服务,经双方友好协商,特订立本合同,以便共同遵守。
一、维修项目设备名称:________________设备型号:________________设备编号:________________二、维修内容(1)更换故障零部件(包括但不限于传感器、控制器、驱动器等);(2)调整、修复损坏的机械结构;(3)优化系统设置,提高设备精度;(4)其他必要的维修措施。
三、维修费用及支付方式3.1 维修费用:双方协商确定维修费用为人民币(大写):____元整(小写):____元。
3.2 支付方式:乙方在本合同签订后3个工作日内,向甲方支付维修费用。
四、维修期限4.1 甲方应在接到乙方维修委托后,根据设备故障情况,尽快安排维修工作,确保在合同约定的维修期限内完成维修。
维修期限为:____个工作日。
五、质量保证5.1 甲方保证所提供的维修服务符合国家相关法律法规及行业标准,维修后的设备性能达到原设备标准。
5.2 甲方对维修后的设备提供6个月的质保期,质保期内如设备出现故障,甲方应免费进行维修。
六、保密条款6.1 双方在履行本合同过程中所获悉的对方的商业秘密、技术秘密等,应予以严格保密,未经对方同意不得向第三方披露。
61.1 商业秘密:指不为公众所知悉、能为权利人带来经济利益、具有实用性并且权利人采取保密措施的技术信息和经营信息。
6.2 保密期限:自本合同签订之日起至合同终止或履行完毕之日止。
七、违约责任7.1 任何一方违反本合同的约定,导致合同无法履行或造成对方损失的,应承担违约责任,向对方支付违约金,并赔偿损失。
八、争议解决8.1 双方在履行本合同过程中发生的争议,应通过友好协商解决;协商不成的,任何一方均有权向合同签订地的人民法院提起诉讼。
MH3D DCC_PCDMIS_TESA_AG
三坐标测量机技术协议CMM Technical Agreement买方: 协议编号: XYThe Buyer: NO:卖方: 海克斯康贸易(青岛)有限公司签订日期: 2013年4月13日The Seller: Hexagon Metrology Trading (Qingdao)CO.,LtdDate:供需双方代表就买方订购的Micro-Hite DCC xx.xx.xx型三坐标测量机进行了技术和性能交流,特签定本技术协议。
本技术协议包含以下几部分内容:Through technical and performance communication between buyer and seller, the buyer agrees to buy 3D Measuring Machine Micro-Hite DCC xx.xx.xx from the seller according to the terms and conditions stipulated below. The agreement including the several contents:I. 测量机供货清单CUSTOMER SUMMARY SHEETII. 技术描述Technical DescriptionIII. 选项描述Options DescriptionIV. 服务条款ServiceV. 三坐标测量机验收办法CMM Acceptance Method买方: The Buyer 卖方:The Seller海克斯康贸易(青岛)有限公司Hexagon Metrology Trading (Qingdao)CO.,Ltd.通讯地址: Address 通讯地址:Address青岛保税区保一路富润综合楼Furun Building, Baoyi Rd., BondedArea, Qingdao 266555, P.R.China代表: Represertative 代表: Representative电话/TEL: 电话/TEL: 400 6580 400手机/Mobile: 手机/Mobile:传真/FAX: 传真/FAX: (0532)-8089-5030邮政编码: ZIP 邮政编码:ZIP266101I.MH DCC测量机供货清单 SUMMARY SHEETII.技术描述Technical DescriptionA.主机 Machine:MICRO-HITE DCC数控三坐标测量机是工业计量应用领域中的经济有效的测量解决方案,从而提高了生产过程中的检测效率和检测精度。
三坐标维修合同范本

三坐标维修合同范本甲方(委托方):________________乙方(受托方):________________根据《中华人民共和国合同法》及相关法律法规的规定,甲乙双方在平等、自愿、公平、诚实信用的原则基础上,就甲方委托乙方提供三坐标维修服务事宜,达成如下协议:一、服务内容1.1 甲方委托乙方为其提供三坐标维修服务,服务内容包括但不限于:三坐标的检查、维修、调试、校准等。
1.2 乙方应按照甲方的要求及国家标准、行业标准、企业标准等对三坐标进行维修,确保维修质量符合要求。
1.3 乙方应在维修过程中使用符合国家标准、行业标准、企业标准的配件和材料,确保维修质量。
二、服务期限2.1 本合同的服务期限自____年__月__日起至____年__月__日止。
2.2 在服务期限内,乙方应按照甲方的要求及时完成维修服务。
三、服务费用3.1 甲方向乙方支付的服务费用为人民币____元(大写:__________________________元整)。
3.2 甲方应在合同签订后____个工作日内支付服务费用。
3.3 乙方在收到服务费用后应向甲方开具正规发票。
四、甲方的权利和义务4.1 甲方有权要求乙方按照合同约定提供维修服务。
4.2 甲方应向乙方提供维修所需的场地、设备、工具等条件。
4.3 甲方应保证乙方在维修过程中不受干扰,确保乙方能够顺利开展工作。
五、乙方的权利和义务5.1 乙方有权按照合同约定收取服务费用。
5.2 乙方应按照甲方的要求及时完成维修服务,确保维修质量。
5.3 乙方应保证维修过程中使用符合国家标准、行业标准、企业标准的配件和材料。
六、违约责任6.1 双方应严格履行合同约定的义务,如一方违约,应承担违约责任。
6.2 甲方未按照约定支付服务费用的,乙方有权暂停维修服务,直至甲方支付完毕。
6.3 乙方未按照约定完成维修服务或维修质量不符合要求的,甲方有权要求乙方重新维修或退还部分服务费用。
七、争议解决7.1 双方在履行合同过程中发生的争议,应通过友好协商解决;协商不成的,可以向合同签订地的人民法院提起诉讼。
三坐标测量机技术协议要点
三坐标测量机技术协议要点一、技术协议的目的与背景三坐标测量机技术协议是针对三坐标测量技术的规范化协议。
三坐标测量机是一种精密度量仪器,主要用于测量机械工件的形状、尺寸、位置和轨迹等方面的数据。
近年来,随着制造业发展的不断推进,三坐标测量机在检测制造业中扮演着越来越重要的角色。
为了规范三坐标测量机技术的应用,提高检测数据的准确性和信度,制定技术协议变得十分必要。
二、技术协议适用范围三坐标测量机技术协议适用于所有使用三坐标测量机的企业,包括制造业、测量检验机构等。
三、技术协议要点1. 仪器精度及规格三坐标测量机的精度是使用该仪器所测量的结果与该被测量特性的实际值所差的最大限差,这个数据通常用误差极限等指标来表示。
在技术协议中,应规定三坐标测量机的精度范围,承受荷载的范围,以及与其他仪器设备的配合规格等。
2. 三坐标测量机的使用规范除了仪器本身的规格和精度之外,三坐标测量机的使用方式也十分重要。
技术协议应指导使用者在使用过程中的操作规范、数据处理准确性的保证规范以及如何确保测量的精度。
3. 数据处理和信息共享三坐标测量机测量出来的数据需要经过加工和处理,才能形成真正意义上的数据信息。
技术协议应规定数据加工和处理的操作规范,以及信息处理后的共享和传递方法和流程等。
4. 维护和改进在使用过程中,三坐标测量机需要进行一定程度的维护,并且随着时间的推移,需要对其进行一定的升级和改进。
技术协议应规定相应的维护和改进措施,以确保三坐标测量机能够保持其精度和工作稳定性。
四、技术协议的实施三坐标测量机技术协议的实施需要使用者、监管机构和生产厂家等多方合作。
技术协议应该由专业技术人员起草,并由政府部门或相关协会进行认可和监督。
在使用过程中,需要建立机制来执行技术协议,同时需要加强技术人员的培训,提高其对三坐标测量机技术的应用和解决问题的能力。
五、技术协议的意义三坐标测量机技术协议的制定和实施,不仅是规范测量机的使用和操作,更是提高测量技术的准确性和信度、提高制造产业的质量、增强竞争力、促进产业升级和转型升级的重要标志。
三坐标测量机技术协议

三坐标测量机技术协议4。
设备型号、规格4。
1 型号: global advantage 12.15.10 三坐标测量机4。
2外形尺寸: 1838mm×2880mm×3431mm4.3测量有效行程范围: X轴= 1200mmY轴=1500mmZ轴=1000mm4。
4工作台最大承载:1800 Kg4。
5主机重量:3792 Kg5。
设备主要技术指标5.1光栅尺分辨率:0。
039μm5。
2 测头系统5。
2。
1测座:Renishaw PH10MQ分度角A(俯仰):0°-105°步距7。
5°分度角B(旋转):±180°步距7.5°定位重复性:0。
5μm重量 580g5.2.2测头: Renishaw SP25M扫描/触发套装组中1×(A-2237-1002)SM25-2 扫描模块组1×(A-2237—1003)SM25-3 扫描模块组1×(A-2237-1200)TM25—20 TTP吸盘适配器1×(A—1371-0270)TP20 标准力吸盘PI200测头控制器5。
3 测头更换架英国Renishaw 配合MRS单元FCR25六工位柔性更换架。
配置PC-DIMS Tip Changer 测头更换单元软件(美国Wilcox)保证换针的准确可靠。
该系统包括: MRS单元(400mm):1×400mm横杆,2×支座,4×125mm长立柱,2×背板适配器,2×支坐适配器.(2套)FCR25柔性更换架:1×FCR25,3×PA25—SH,3×PA25—205.4精度【单位:MPE(μm)、L(mm)、τ(s)】5.4.1 长度测量最大允许示值误差MPE E:≤2.1+3L/1000;5.4.2 最大允许探测误差MPE P:≤1。
三坐标测量机技术协议

三坐标测量机技术协议买方:协议编号:最终用户:签订日期:卖方:供需双方代表就买方订购的XX型三坐标测量机进行了技术和性能交流,特签定本技术协议。
本技术协议包含以下几部分内容:I. 测量机供货清单II. 技术描述III. 服务条款IV. 三坐标测量机验收办法买方:卖方:通讯地址:通讯地址:代表:代表:电话:电话:手机:手机:传真:传真:邮政编码:邮政编码:I.测量机供货清单备件易损件清单专用工具清单II.技术描述A. 主机:XX系列三坐标测量机是XX计量产业集团最新一代高性能活动桥式测量机。
高稳定性的测量系统,能够快速有效地完成通用的车间检测需要,大大提高了检测效率。
X向横梁采用XX获得专利的(精密三角梁)横梁设计,提供最佳刚性质量比:轻合金桥架较传统设计刚性提高25%,X向导轨重心降低50%, 从而保证了平稳、精确的运动。
移动桥上的轴承跨距更宽,降低了由于桥架自转导致的误差,保证了整机空间精度更高;同时降低了重复性误差,提高了速度和加速度,使得测量效率更高。
XX集单点触发和连续扫描功能于一身,可配备多种测头系统,如接触式和非接触扫描测头。
通过配备新一代高稳定性的控制系统,并结合温度和精度补偿系统对测量机性能进行优化,再加上先进的算法,XX支持高速、高精度模拟开环以及闭环扫描。
该测量机采用获得专利的快速探测模式的指向、点击和扫描技术,可把扫描测头当作触发式测头使用,而不会损失速度和精度。
•技术特点▪①X向横梁采用超高刚性精密三角梁技术,通过减轻运动负荷从而提高了整机的性能,是保证稳定性和刚性的最佳结构设计;该领先技术受到专利保护。
②标配机器与工件的线性温度补偿技术。
③Y轴采用XX获得专利的整体燕尾型导轨,提高了测量机的精度和重复性。
④三轴均采用同步带驱动,结构紧凑、不打滑、速度快、噪音低、易维护。
⑤Z轴采用可调气动平衡,运动平稳;并可在紧急情况下自动制动,保证安全。
⑥三轴均采用德国海德汉镀金光栅尺,其热膨胀系数的准确度及均匀性经德国国家标准局(PTB)认证,确保准确稳定的温度补偿。
三坐标技术协议
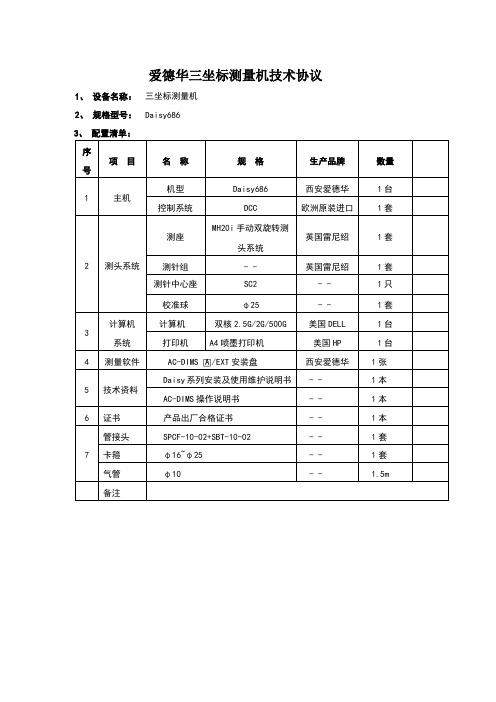
爱德华三坐标测量机技术协议1、设备名称:三坐标测量机2、规格型号:Daisy6863、配置清单:4.2、性能指标:01、测头系统:RENISHAW MH20i手动双旋转可分度测头系统技术参数:TP20测力模块一个测头座分度机构:绕 A轴(水平轴)范围 0°~90°最小步距15°绕B轴(铅垂轴)范围±180°最小步距15°02、测针组:测针(mm):订货号型号材料测球直径长度杆直径有效长度数量(根)验收结果A-5003-0033PS48R红宝石测球/碳化钨杆1200.812.51A-5000-3603PS2R红宝石测球/不锈钢杆220 1.4141A-5000-4160PS16R红宝石测球/不锈钢杆320 1.517.51A-5000-4161PS17R红宝石测球/不锈钢杆420 1.5201A-5000-7807PS8R红宝石测球/不锈钢杆210164A-5000-3604PS1R红宝石测球/不锈钢杆310 1.57.51订货号型号材料直径长度数量(根)M-5000-7634SE7不锈钢杆351M-5000-3647SE4不锈钢杆3101M-5000-3648SE5不锈钢杆3201M-5000-4162SE6不锈钢杆3301订货号型号材料中心尺寸有效长度数量(个)A-5000-3627SC2不锈钢杆77.5103:校准器:标准球Φ25及万向球座T504:精度指标:长度计量系统:英国进口精密光栅尺分辨率: 0.5m;测量范围X×Y×Z: 600mm×800mm×600mm示值误差: MPEE≤2.4+L/300m探测误差: MPEP≤2.4m4.3、环境要求(详情见附件《三坐标测量机安装使用环境技术要求自检表》)01、温度:20±2℃ 1℃/h 1℃/m 2℃/24h02、湿度:40%-70%03、电源:220V±10%, 50HZ-60HZ04、气源:≥0.55MPa4.4、控制系统: DCC 控制器是德国MORA Metrology GmbH公司高性价比的运动控制器,能够广泛适用于各种工况的高性能、高可靠性的运动控制解决方案。
三坐标测量合同协议书范本
三坐标测量合同协议书范本甲方(委托方):乙方(受托方):根据《中华人民共和国合同法》及相关法律法规的规定,经双方友好协商,本着平等、自愿、公平、诚信的原则,就甲方委托乙方进行三坐标测量事宜,达成如下协议:一、测量项目及要求1.1 甲方委托乙方进行三坐标测量,测量对象为甲方生产的产品(以下简称“产品”)。
1.2 乙方应按照甲方的技术要求和测量标准,对产品进行准确、可靠的三坐标测量。
1.3 测量内容包括:产品的尺寸、形状、位置等关键参数的测量。
1.4 乙方应在双方约定的时间内完成测量任务,并提交测量报告。
二、测量费用及支付2.1 甲方应支付乙方测量费用,具体金额为人民币【】元(大写:【】元整)。
2.2 甲方支付乙方测量费用时,应提供正规发票。
2.3 测量费用包括但不限于:测量设备租赁费、测量人员工资、测量材料费等。
三、保密条款3.1 双方在履行本协议过程中所获悉的对方的技术秘密、商业秘密等敏感信息,应予以严格保密。
3.2 保密期限自本协议签订之日起至协议终止或履行完毕之日止。
3.3 双方违反保密义务的,应承担违约责任,赔偿对方因此遭受的损失。
四、质量保证4.1 乙方应保证测量结果的准确性、可靠性和完整性。
4.2 乙方应对测量过程中出现的问题及时与甲方沟通,并提供技术支持。
4.3 甲方对测量结果有异议的,乙方应在接到异议通知后【】日内进行复测或解释。
五、违约责任5.1 乙方未按照约定时间完成测量任务的,应按照逾期天数向甲方支付违约金,违约金计算方式为:测量费用的【】%。
5.2 乙方测量结果不准确、不可靠或不完备的,应重新进行测量,并承担因此产生的费用。
5.3 甲方未按照约定时间支付测量费用的,应按照逾期天数向乙方支付违约金,违约金计算方式为:测量费用的【】%。
六、争议解决6.1 双方在履行本协议过程中发生的争议,应首先通过友好协商解决;协商不成的,可以向有管辖权的人民法院起诉。
七、其他约定7.1 本协议自双方签字(或盖章)之日起生效,有效期为【】年。
三坐标检测合同模板
三坐标检测合同模板这是小编精心编写的合同文档,其中清晰明确的阐述了合同的各项重要内容与条款,请基于您自己的需求,在此基础上再修改以得到最终合同版本,谢谢!三坐标检测合同模板甲方:__________乙方:__________鉴于甲方需要进行三坐标检测服务,乙方具备提供此类服务的资质和能力,经甲乙双方友好协商,特订立本合同,以便共同遵守。
第一条 服务内容1.1 乙方根据甲方的委托,提供三坐标检测服务,包括:(1)对甲方产品进行三坐标测量;(2)提供测量数据报告;(3)为甲方提供必要的技术支持和咨询服务。
第二条 服务期限2.1 本合同自双方签订之日起生效,有效期为____个月。
2.2 乙方应在合同有效期内按照甲方的要求完成三坐标检测服务。
第三条 服务费用3.1 乙方向甲方提供三坐标检测服务的费用为人民币____元(大写:_________________________元整)。
3.2 甲方应按照本合同约定的付款方式及时向乙方支付服务费用。
第四条 付款方式4.1 甲方在本合同签订后____个工作日内,向乙方支付服务费用的50%作为预付款。
4.2 乙方在完成检测服务并出具检测报告后,甲方应向乙方支付剩余的50%服务费用。
第五条 保密条款5.1 甲乙双方在合同履行过程中所获悉的对方的商业秘密和技术秘密,应予以严格保密。
5.2 保密期限自本合同签订之日起算,至合同终止或履行完毕之日止。
第六条 违约责任6.1 双方应严格履行本合同的约定,如一方违约,应承担违约责任,向守约方支付违约金,并赔偿因此给对方造成的损失。
第七条 争议解决7.1 对于本合同的解释或履行发生的任何争议,双方应首先通过友好协商解决;协商不成的,任何一方均有权向合同签订地人民法院提起诉讼。
第八条 其他约定8.1 本合同一式两份,甲乙双方各执一份。
8.2 本合同自双方签字(或盖章)之日起生效。
甲方(盖章):__________ 乙方(盖章):__________代表(签名):__________ 代表(签名):__________签订日期:__________ 签订日期:__________请您根据实际情况修改上述合同内容,并在签订前咨询专业法律人士,以确保合同的合法性和有效性。
三坐标检测合同范本
三坐标检测合同范本甲方(委托方):____________________法定代表人:____________________地址:____________________联系方式:____________________乙方(受托方):____________________法定代表人:____________________地址:____________________联系方式:____________________鉴于甲方需要对特定产品或工件进行三坐标检测,乙方具备相应的检测能力和资质,双方经友好协商达成如下协议:一、检测项目及要求1. 甲方委托乙方进行的三坐标检测项目为:____________________。
2. 检测的具体要求包括但不限于:精度要求、检测标准、报告格式等,由双方在本合同附件中详细约定。
二、检测费用及支付方式1. 检测费用总计为人民币________元(大写:____________元整)。
2. 甲方应在合同签订后______个工作日内支付检测费用的______%作为预付款;剩余款项在乙方提交检测报告后______个工作日内支付。
三、检测时间及地点1. 乙方应在收到甲方送检样品后的______个工作日内完成检测工作。
2. 检测地点为乙方的检测实验室或双方约定的其他地点。
四、双方的权利和义务1. 甲方的权利和义务按时提供符合检测要求的送检样品。
按照约定支付检测费用。
有权要求乙方按照合同约定的时间、标准完成检测并提供检测报告。
2. 乙方的权利和义务按照国家相关标准和甲方要求进行检测。
确保检测数据的准确性和可靠性。
按时向甲方提交检测报告。
五、保密条款双方应对在检测过程中涉及到的技术资料、检测数据等信息严格保密,未经对方书面同意,不得向任何第三方披露。
六、违约责任1. 若甲方未按时支付检测费用,每逾期一天,应按照未支付金额的______%向乙方支付违约金。
2. 若乙方未按照合同约定的时间、标准完成检测,应向甲方支付检测费用的______%作为违约金,并负责重新检测直至符合要求。
三坐标检测合同范本

三坐标检测合同范本甲方(委托方):________________乙方(检测方):________________根据《中华人民共和国合同法》及相关法律法规的规定,甲乙双方在平等、自愿、公平、诚实信用的原则基础上,就甲方委托乙方进行三坐标检测事宜,达成如下协议:一、检测项目及内容1.1 检测项目名称:________________1.2 检测内容:________________1.3 检测依据:________________二、检测费用及支付方式2.1 检测费用:人民币_______元(大写:________________)2.2 付款方式:签订合同后_______日内,甲方支付检测费用的_______%作为预付款;检测完成并出具检测报告后_______日内,甲方支付剩余的检测费用。
2.3 乙方在收到甲方支付的首付款后,应及时开展检测工作。
三、检测报告3.1 乙方应在检测工作完成后_______日内向甲方提供检测报告。
3.2 检测报告一式_______份,甲乙双方各执_______份。
3.3 检测报告的内容包括:检测结果、检测数据、检测日期、检测人员等信息。
四、检测样品4.1 甲方应向乙方提供符合检测要求的样品,并保证样品的真实性、完整性和有效性。
4.2 乙方在收到样品后,应对样品进行验收,如发现样品不符合检测要求,应及时通知甲方更换或补充样品。
五、检测期限5.1 乙方应在签订合同后_______日内完成检测工作。
5.2 如因甲方原因导致检测工作无法按期完成,乙方有权要求甲方延长检测期限,并支付相应的加班费用。
六、保密条款6.1 双方在履行本合同过程中所获悉的对方商业秘密和技术秘密,应予以严格保密。
6.2 保密期限自本合同签订之日起算,至合同履行完毕之日止。
七、违约责任7.1 甲方未按约定支付检测费用的,乙方有权暂停检测工作,并要求甲方支付滞纳金,滞纳金为未支付款项的_______%。
7.2 乙方未按约定完成检测工作或检测报告不符合约定要求的,甲方有权要求乙方重新检测或退还部分检测费用,并支付违约金,违约金为检测费用的_______%。
三坐标测量仪技术规格书

“三坐标测量仪”技术规格书一、设备需求1.设备名称:三坐标测量仪2.技术要求:2.1 技术参数:*2.1.1 测量范围: x≥1200mm, y≥600mm, z≥500mm*2.1.2 探测球精度MPEp ≤2.5μm*2.1.3 长度精度MPEe ≤2.2+L/400 (μm)*2.1.4 3D移动速度≥560mm/sec2.1.5 3D加速度≥1700mm/ sec²*2.1.6工作台承重≥700Kg2.1.7 扫描精度≤+/-1µm2.2 测量功能:2.2.1 进行完整的几何元素测量;2.2.2 形位公差测量;2.2.3 金属钣金和塑料薄壁件测量;2.2.4 曲线曲面测量;2.2.5 模具测量;2.2.6 激光扫描;2.2.7 模型自动拼接;2.2.8 可快速、完整、反复测量结构复杂的工件。
2.3 软件功能:2.3.1 支持完整的几何元素测量;2.3.2 尺寸和公差报告;2.3.3 自动校正测头并自动生成测头路径;2.3.4 CAD数模的导入导出;;2.3.6 完整的扫描与数字化逆向功能;2.3.7 支持测针自动更换;2.3.8 PTB完全认证。
2.4 控制系统:2.4.1能够实现真正的实时控制;2.4.2 获欧洲CE认证或美国UL认证。
2.5 其它:2.5.1 减震结构;2.5.2 防碰撞装置;* 2.5.3气压调节阀数量≥8个和空气轴承数量≥25个。
3. 主机、附件详细清单3. 1 标准配置:3.1.1主机1套;3.1.2计算机系统1套;●P4处理器≥3GHz●内存DDR≥1G●硬盘≥320GB●DVD光驱●独立显卡≥128M●液晶显示器≥17’3.1.3控制系统1套;3.1.4软件系统1套;3.1.5测头系统1套;●雷尼绍(RENISHAW)电动式可旋转/摆动自动测座,重复精度≤+0.5 μm;●光栅尺:RENISHAW高分辨率、高精度光栅尺●电动触发式测头,测量误差≤±1 um●测针套装(1套),包含测针个数≥9根,加长杆≥3根,测针工具等3. 2 附件3.2.1 激光扫描测头及对应的扫描控制盒1套;3.2.3 测针更换架1个;3.2.4 操纵杆1个;3.2.5 过滤系统2套;3.2.6 HP彩色激光打印机1台;3.2.7 脱机版教学软件40套。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三坐标测量机技术协议4.设备型号、规格4.1 型号:global advantage 12.15.10 三坐标测量机4.2外形尺寸:1838mm×2880mm×3431mm4.3测量有效行程范围:X轴=1200mmY轴=1500mmZ轴=1000mm4.4工作台最大承载:1800 Kg4.5主机重量:3792 Kg5.设备主要技术指标5.1光栅尺分辨率:0.039μm5.2 测头系统5.2.1测座:Renishaw PH10MQ分度角A(俯仰):0°—105°步距7.5°分度角B(旋转):±180°步距7.5°定位重复性:0.5μm重量580g5.2.2测头:Renishaw SP25M扫描/触发套装组中1×(A-2237-1002)SM25-2 扫描模块组1×(A-2237-1003)SM25-3 扫描模块组1×(A-2237-1200)TM25-20 TTP吸盘适配器1×(A-1371-0270)TP20 标准力吸盘PI200测头控制器5.3 测头更换架英国Renishaw 配合MRS单元FCR25六工位柔性更换架。
配置PC-DIMS Tip Changer测头更换单元软件(美国Wilcox)保证换针的准确可靠。
该系统包括:MRS单元(400mm):1×400mm横杆,2×支座,4×125mm长立柱,2×背板适配器,2×支坐适配器。
(2套)FCR25柔性更换架:1×FCR25,3×PA25-SH,3×PA25-205.4精度【单位:MPE(μm)、L(mm)、τ(s)】5.4.1 长度测量最大允许示值误差MPE E:≤2.1+3L/1000;5.4.2 最大允许探测误差MPE P:≤1.8;5.4.3 最大允许扫描探测误差MPE THP/τ:≤3.0/68;5.4.4动态性能:3D运动精度(mm/s):8663D运动加速度(mm/s2):13005.5标准校验球:直径φ25mm圆度≤0.1μm材料陶瓷5.6计算机系统5.6.1 品牌:惠普Compaq6080pro计算机5.6.2 计算机CPU:双核3.0Ghz / 内存4GB / 显卡512MB;硬盘:250GB以上,DVD-CDRW光驱;鼠标、键盘、24寸彩色液晶显示器;界面操作支持WINDOWS XP及WINDOWS 7;电脑桌椅一套。
5.6.3 打印机:HP A4彩色喷墨打印机6. 设备结构6.1移动桥式结构,固定花岗岩平台。
要求设备结构设计合理,测量机的工件平台开敞性要好,操作者在平台左右两边都可方便的实现对工件底面的测量。
6.2 X向横梁采用超高刚性精密三角梁技术保证稳定性和刚性的最佳结构设计。
6.3 Y轴采用整体燕尾型导轨,提高测量机的精度和重复性。
6.4 Z轴采用可调气动平衡,并可紧急自动制动。
6.5 三轴均采用HEIDENHAIN抗磨损高分辨率镀金光栅尺,膨胀系数通过德国PTB认证,并提供证书。
6.6 光栅尺的安装方式采用卡槽式安装。
6.7 标配美国布朗夏普的光栅与工件线性温度补偿系统,保证测量结果的准确性。
6.8 标配美国布朗夏普空气轴承、美国CMC直流伺服电机驱动。
6.9 具有21项参数几何误差补偿。
6.10具有高效的防震系统。
6.11驱动方式:操纵杆和CNC形式。
7. 控制系统采用意大利DEA公司双位控制柜B3C控制系统。
7.1支持触发测头、模拟扫描测头和非接触扫描测头。
7.2实时精准地读取空间坐标值。
高速运行时路径应连续平滑且稳定。
严禁出现停顿拐角、爬行等现象,同时保持高精度。
7.3具有对坐标转移动到行程极限、运动速度超速、气压过低等故障自诊断及报警功能。
7.4具有防碰撞保护功能。
7.5实现工件几何特征量的直接测量,并完成几何关系的计算、构造和形位公差的评价与分析。
7.6应具有自学习式编程测量功能测量。
7.7整体结构线路设计满足功能扩展、软件升级的需要。
7.8应具有良好的散热、防尘功能。
7.9控制系统在遇到突然停电或其他意外故障时,具备自我保护措施及数据不丢失的能力。
7.10操纵盒操作灵活方便,手动测量和自动测量过程中可以任意、随时改变测量速度,可以矢量方向控制坐标的运行。
7.11在CNC模式下可实现调速控制,支持低速蠕动。
7.12具有三个轴的锁定和紧急制动功能。
7.13控制系统主要参数安全等级:IP54 (依据EN60204标准)温度范围:5-40°C电源要求:230 V 10%; 50 Hz功率:2000 VA相对湿度:20% 75 %8 软件系统采用美国Milcox公司的PC-DMIS CAD++测量软件。
8.1应有中文和英文操作界面和在线的中文帮助。
8.2应有完善的图形化测头系统管理和应用操作、零件坐标系管理和应用操作、所需几何特征的测量、构造和公差评价。
基本几何元素测量包括:点、线、面、圆、圆柱、圆锥、球、圆环、曲线、曲面等;形状公差评价包括:直线度、平行度、圆度、圆柱度、圆锥度、球度以及各种形面轮廓度等;位置公差评价包括:平行度、垂直度、倾斜度、对称度、位置度、同轴度、同心度、轴向跳动、径向跳动、轴向全跳动、径向全跳动等;几何运算关系包括:距离、相交、角度、构造等;8.3实现IGES格式的CAD数模的导入、导出、编程和测量,并完成几何关系的计算、构造和形位公差的评价与分析。
8.4利用CAD模型零件,在测量前图形化显示测量路径的模拟运行、校验、路径优化和防碰撞检查和自动编程功能。
8.5除具备标准的3-2-1坐标系找正功能外,还应有迭代法和最佳匹配等方法,用于复杂零部件的坐标找正。
8.6具有薄壁件测量的功能。
薄壁件测量这些功能包括自动寻找实际测量位置,实时三维测头补偿,自动补偿变形工件的表面位置和方向。
8.7拥有全类型的扫描功能,包括开线、闭线、片区、周边、截面、自由曲面、网格扫描等扫描模式,完成复杂曲线/曲面的测量任务并图形化输出;8.8 对测量点进行样条的曲线、曲面拟合,并上传至Pro-E、UG设计造型软件完成零件逆向设计。
8.9支持触发式测量和连续扫描测量,探测力稳定可靠。
8.10叶轮轮廓连续扫描测量,完成与叶轮理论数据的比较分析(见附图)。
8.11测量软件包应具有德国PTB算法认证,并提供有效证书。
8.12符合ISO标准的公差评判能力。
9测头系统功能9.1 Renishaw PH10MQ旋转式自动分度测座;9.2配备SP25M M3测针、TP20 M2测针、加长杆:9.4精度指标验收时的探针长度不小于50mm ;9.5标准球应由具有检定资质的第三方进行检定/校准后才能使用,提供检测报告。
10设备运行环境条件 10.1 环境条件 温度范围: 18-22℃; 相对湿度: 25%-70%;温度梯度: 1℃/m ; 1℃/h ; 2℃/24h 。
10.2 供气系统10.2.1 最小供气压力:0.5 MPa 耗气量:≤150升/分钟10.2.2配置DD9/PD9阿特拉斯品牌两级空气过滤器一套。
10.2.3配置IDFA4E-23 SMC 品牌冷冻干燥机一套。
10.3 电源系统 电压:220 V 10% 频率:50hz/60hz 电流:15A接地电阻:小于4欧姆103969082 5-way star stylus 1 203969054 5-way center1 20396923220mm Styli Extensions 1合计Total2311备附件11.1易损件清单序号零件名称型号单位数量1保险丝CN66-510-202(5A)只3 2保险丝CN66-510-203(6A)只3 3保险丝CN66-510-204(10A)只3 4过滤器滤芯D6*******只1 5过滤器滤芯D6*******只16Z向磁条行程开关I00012404个17X/Y向磁条行程开关I00012403个18X向传动带4.2米GLOBAL 121210/123010D4*******个19Z向传动带2.35米GLOBAL D D4*******个11 0Y向传动带5.3米GLOBAL D2 122210D4*******个111减速器多楔带D4*******根112减速器齿型带D4*******根111.2备品备件清单序号名称型号(规格)数量1台面夹具Swift-Fix 夹具系统黄金套装(98件,含支撑和固定附件、2个底板)1 2同步多楔带X轴、Y轴、Z轴各2根6 3测针长度(L)测球直径(φ)测球材料测杆材料数量30mm1.5mm红宝石不锈钢250mm3mm红宝石碳化钨24mm氮化硅陶瓷24mm氧陶瓷212 随机技术文件序号文件名称数量化锆5mm红宝石碳纤维35mm红宝石不锈钢2100mm6mm红宝石碳纤维26mm氮化硅碳纤维26mm氧化锆碳纤维28mm红宝石碳纤维1加长杆50mm碳纤维2加长杆100mm2 4电子数显干/湿温度计——2 5贴服温度计——3 6正弦平口钳钳口宽度≥160mm,最大张开度≥186mm倾角0°—90°1 7等高V型铁90°(附带压板) 105mm×105mm×78mm2 8保险丝——19高粘橡皮泥——31产品合格证书(含出厂精度检验证书,性能检测报告壹份等质量证明文件)2三坐标测量机中文说明书(包括操作使用说明及维护贰套手册、编程说明手册、设备安装调试机械电器说明书)3三坐标测量机测量软件说明书以及安装数据光盘壹套4设备装箱清单壹份5光栅尺出厂检定合格证明壹份6PTB证书壹份7校验球计量检定报告壹份8冷冻干燥机、空气过滤器合格证明材料壹份9外购部件说明书、使用手册以及电器机械详细资料壹份(含计算机的驱动、系统光盘及保修卡,打印机驱动光盘、保修卡等)1安装平面布置图(含基础图)及安装调试说明书壹份13设备安装、调试乙方负责测量机安装、调试及最终验收。
同时负责对甲方现有的一台ZC12108H型三坐标测量机免费维修达到出厂精度:长度测量最大允许示值误差MPE E:≤2.0+3.3L/1000 μm最大允许探测误差MPE P:≤2.5 μm13.1 设备安装调试之前,乙方必须依该设备地基施工要求,在合同签订后2周内向甲方提供设备安装基础平面布置图,便于甲方组织施工。
若乙方提供地基施工要求的图纸或提供时间不能满足甲方施工的要求,造成设备不能按时安装调试,乙方必须承担其一切责任和甲方因此造成的损失。
13.2所有包装箱需在甲方和乙方人员到场认可的情况下才能开启。
验收内容包括货物数量(按设备装箱清单)、外观质量、规格参数、设备精度、备附件和技术文件等内容。