第五章 GPS测量中的数据格式
第五章GPS测量中的数据格式

0 顺序
RCV CLOCK OFFS APPL
2010481.00一的历各0P个观元卫13 历测时星元 数 刻 的L214
L2 13
P2
卫星数及
卫星列表
10 36.0000000
据观测值
# / TYPES OF OBSE接RV收机钟
INTERVAL
差
TIME OF FIRST OBS
END OF HEADER
两位年号
98:1998 00:2000 11:2011
文件类型
O:观测值 N:星历 M:气象数据 G:GLONASS星历 H:同步卫星GPS载 荷的导航电文
C:钟文件
• 例:wh022931.02o,wh022293.02n
文件结构
• 组织形式
– 按节、记录(行)、字段和列 – 所有文件均分为两节:文件头和数据记录 – 每个记录占一行,不超过80列宽 – 文件头中每个记录的第61~80列为标签,说明
件 头
234
长与因缺子省情 YY
437511274况波观型..9不长测及0123历同因值排0 元的 子 类 列间568隔746G61..40000G154589G01965..00G0107
G18
G19
ANT # / TYPE APPROX POSITION XYZ ANTENNA: DELTA H/E/N WAVELENGTH FACT L1/2 WAVELENGTH FACT L1/2
01 3 24 13 10 50.0000000 4 4
文
1
2
2 G 9 G12
*** WAVELENGTH FACTOR CHANGED FOR 2 SATELLITES ***
GPS采集数据的解析格式

<10> Magnetic Variation,磁偏角(000.0~180.0度,前导位数不足则补0)
<11> Declination,磁偏角方向,E(东)或W(西)
<12> Mode Indicator,模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
<8> 水平精确度,0.5到99.9。
<9> 天线离海平面的高度,-9999.9到9999.9米
<10> 高度单位,M表示单位米。
<11> 大地椭球面相对海平面的高度(-999.9到9999.9)。
<12> 高度单位,M表示单位米。
<5> Longitude,经度dddmm.mmmm(度分)格式(前导位数不足则补0)
<6> 经度半球E(东经)或W(西经)
<7> 地面速率(000.0~999.9节,Knot,前导位数不足则补0)
<8> 地面航向(000.0~359.9度,以真北为参考基准,前导位数不足则补0)
<1> UTC(Coordinated Universal Time)时间,hhmmss(时分秒)格式
<2> 定位状态,A=有效定位,V=无效定位
<3> Latitude,纬度ddmm.mmmm(度分)格式(前导位数不足则补0)
<4> 纬度半球N(北半球)或S(南半球)
//"$GPGGA,000006.000,4001.2753,N,11623.8398,E,0,00,50.0,37.17,M,-7.97,M,,*43"
GPS协议标准数据格式

GPS模块数据格式GPRMC(建议使用最小GPS数据格式)$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11><CR><LF>1) 标准定位时间(UTC time)格式:时时分分秒秒.秒秒秒(hhmmss.sss)。
2) 定位状态,A = 数据可用,V = 数据不可用。
3) 纬度,格式:度度分分.分分分分(ddmm.mmmm)。
4) 纬度区分,北半球(N)或南半球(S)。
5) 经度,格式:度度分分.分分分分。
6) 经度区分,东(E)半球或西(W)半球。
7) 相对位移速度,0.0 至1851.8 knots8) 相对位移方向,000.0 至359.9度。
实际值。
9) 日期,格式:日日月月年年(ddmmyy)。
10) 磁极变量,000.0 至180.0。
11) 度数。
12) Checksum.(检查位)GPGSV(所示卫星格式)$GPGSV, <1>,<2>,<3>,<4>,<5>,<6>,<7>,?<4>,<5>,<6>,<7>,<8><CR><LF>1) 天空中收到讯号的卫星总数。
2) 定位的卫星总数。
3) 天空中的卫星总数,00 至12。
4) 卫星编号,01 至32。
5) 卫星仰角,OO 至90 度。
6) 卫星方位角,OOO 至359 度。
实际值。
7) 讯号噪声比(C/No),00 至99 dB;无表未接收到讯号。
8) Checksum.(检查位).第<4>,<5>,<6>,<7>项个别卫星会重复出现,每行最多有四颗卫星。
GPS数据格式与分析
目前GPS(全球定位系统)定位应用市场日趋成熟,正在进入应用的高速发展时期。
看到论坛里不断有人提问关于GPS的问题。
现将个人对GPS的了解写出来跟大家一块探讨。
1、 GPS应用简介近年来GPS系统,已经在大地测绘、海上渔用、车辆定位监控、建筑、农业等各个领域得到广泛应用。
从九十年代我国引进GPS定位技术开始,经过十多年的市场培育,GPS定位应用进入了发展的最好时机,未来十年基于GPS的应用将会改变我们的生活和工作方式。
目前市场上的大部分GPS接受模块都是通过RS232串口与MCU进行数据传输的。
这些数据包括经度、纬度、海拔高度、时间、卫星使用情况等基本信息。
开发人员再依据这些基本数据,进行数据处理来完成整套的定位系统软件。
2、数据格式在进行数据接受编程之前,先介绍一下该模块的数据格式。
它支持NMEA-0183输出格式。
信息如下:GGA位置测定系统定位资料(Global Positioning System Fix Data)GSV 导航卫星资料(GNSS Satellites in View)RMC导航卫星特定精简资料(Recommended Minimum Specific GNSS Data)VTG 方向及速度等相关资料(Course Over Ground and Ground Speed)由于文章篇幅问题,笔者在这里只以接收GGA数据为例,格式如下:$GPGGA,hhmmss,dddmm.mmmm,a,dddmm.mmmm,a,x,xx,x.x,x.x,M,,M,x.x,xxxx*CS例:$GPGGA,033744,2446.5241,N,12100.1536,E,1,10,0.8,133.4,M,,,,*1F说明见表:上面例子中,我们可读出位置信息:北纬24度46.5241分,西经121度00.1536分格林威治时间:3点37分44秒3 部分程序代码(c++)//初始化串口//入口:strComm(串口名) //返回:TRUE(成功);FALSE(失败) BOOL CGPSDlg::InitComm(CString strComm) { int i; DCB dcb; COMMTIMEOUTS TimeOuts; for (i=0; i<3; i++) //串口最多初始化3次{ m_hComm = CreateFile(strComm, GENERIC_READ|GENERIC_WRITE, 0, NULL, OPEN_EXISTING, 0, NULL); if (m_hComm != INV ALID_HANDLE_V ALUE) break; } if (i == 3) //串口初始化失败{ AfxMessageBox("串口初始化失败..."); return FALSE; } SetupComm(m_hComm, MAXLENGTH, MAXLENGTH); //设置发送接收缓冲区大小TimeOuts.ReadIntervalTimeout = 0;//设定5个超时参数TimeOuts.ReadTotalTimeoutMultiplier = 0; TimeOuts.ReadTotalTimeoutConstant = 500; TimeOuts.WriteTotalTimeoutMultiplier = 0; TimeOuts.WriteTotalTimeoutConstant = 500; SetCommTimeouts(m_hComm, &TimeOuts); //设置超时参数GetCommState(m_hComm, &dcb); //获得通信状态dcb.fAbortOnError = FALSE; //有错误不停止dcb.BaudRate = CBR_4800; //波特率4800 dcb.ByteSize = 8; //8位dcb.Parity = NOPARITY; //奇校验dcb.StopBits = ONESTOPBIT; //1位停止位SetCommState(m_hComm, &dcb); //设置通信状态PurgeComm(m_hComm, PURGE_TXCLEAR|PURGE_RXCLEAR); //清空发送和接收缓冲区return TRUE; } //获得GPS参数//注意:从GPS接收到的字符串已经在m_strRecv中,由于是定时接收,所以在这个字符串的头和尾都可能存在// 不完整的NMEA输出字符串,在处理时要特别注意//返回:TRUE(格式正确);FALSE(格式错误) BOOL CGPSDlg::GetGPSParam() { int i,j; CString str,strNEMA; //先判断是否接收到数据if (m_strRecv.IsEmpty()) return FALSE; //若字符串不是以'$'开头的,必须删掉这部分不完整的if (m_strRecv[0] != '$') { i = m_strRecv.Find('\n', 0); if (i == -1) return FALSE; //尾部未接收完整,必须等接收完后才能删除m_strRecv.Delete(0, i+1); //尾部已接收完整(尾部为\r\n结束),删除不完整的部分} //截取完整的NMEA-0183输出语句(m_strRecv中可能有多条语句,每条间以\r\n分隔) for (;;) { i = m_strRecv.Find('\n', 0); if (i == -1) break; //所有的完整输出语句都已经处理完毕,退出循环//截取完整的NMEA-0183输出语句strNEMA = m_strRecv.Left(i+1); m_strRecv.Delete(0, i+1); //下面对各种输出语句进行分别处理if (strNEMA.Find("$GPRMC",0) == 0) { //该输出语句中的各项以','分隔for (i=j=0; strNEMA!='\r'; i++) //j为逗号的计数器{ if (strNEMA == ',') { j++; str = ""; for (i++; strNEMA!=','&&strNEMA!='\r'; i++) str += strNEMA; //str为某项的值i--; //对各项数据分别处理switch (j) { case 1: //时间(UTC) m_strTime = str.Left(6); m_strTime.Insert(2, ':'); m_strTime.Insert(5, ':'); break; case 2: //状态(A-数据有效;V-数据无效,还未定位) if (str == "A") m_strStatus = "有效数据"; else if(str == "V") m_strStatus = "正在定位..."; else m_strStatus = "非法数据格式"; break; case 3: //纬度(ddmm.mmmm) str.Insert(2, "度"); str += "分"; m_strLatitude = str; break; case 4: //纬度指示(N-北纬;S-南纬) if (str == "N") m_strLatitude.Insert(0, "北纬"); else m_strLatitude.Insert(0, "南纬"); break;case 5: //经度(dddmm.mmmm) str.Insert(3, "度"); str += "分"; m_strLongitude = str; break; case 6: //经度指示(E-东经;W-西经) if (str == "E") m_strLongitude.Insert(0, "东经"); else m_strLongitude.Insert(0, "西经"); break; case 7: //速度(单位:节) m_strSpeed = str; break; case 8: //航向(单位:度) m_strCourse = str; break; case 9: //日期(UTC) m_strDate = ""; m_strDate += "20"; m_strDate += str[4]; m_strDate += str[5]; m_strDate += "-"; m_strDate += str[2]; m_strDate += str[3]; m_strDate += "-"; m_strDate += str[0]; m_strDate += str[1]; break; default: break; } } } } else if (strNEMA.Find("$GPGGA",0) == 0) { } else if (strNEMA.Find("$GPGSA",0) == 0) { } else if (strNEMA.Find("$GPGSV",0) == 0) { } else if (strNEMA.Find("$GPGLL",0) == 0) { } else if (strNEMA.Find("$GPVTG",0) == 0) { } else return FALSE; //格式错误} return TRUE; } 相关的主题文章:-------------------------------------------------------------------------------------------------------一、NMEA0183标准语句1、 Global Positioning System Fix Data(GGA)GPS定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF><1> UTC时间,hhmmss(时分秒)格式<2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<3> 纬度半球N(北半球)或S(南半球)<4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)<5> 经度半球E(东经)或W(西经)<6> GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算<7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)<8> HDOP水平精度因子(0.5~99.9)<9> 海拔高度(-9999.9~99999.9)<10> 地球椭球面相对大地水准面的高度<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)2、 GPS DOP and Active Satellites (GSA)当前卫星信息$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<4>,<5>,<6>*hh<CR ><LF><1> 模式,M=手动,A=自动<2> 定位类型,1=没有定位,2=2D定位,3=3D定位<3> PRN码(伪随机噪声码),正在用于解算位置的卫星号(01~32,前面的0也将被传输)。
GPS协议标准数据格式
GPS模块数据格式GPRMC(建议使用最小GPS数据格式)$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11><CR><LF>1) 标准定位时间(UTC time)格式:时时分分秒秒.秒秒秒(hhmmss.sss)。
2) 定位状态,A = 数据可用,V = 数据不可用。
3) 纬度,格式:度度分分.分分分分(ddmm.mmmm)。
4) 纬度区分,北半球(N)或南半球(S)。
5) 经度,格式:度度分分.分分分分。
6) 经度区分,东(E)半球或西(W)半球。
7) 相对位移速度,0.0 至1851.8 knots8) 相对位移方向,000.0 至359.9度。
实际值。
9) 日期,格式:日日月月年年(ddmmyy)。
10) 磁极变量,000.0 至180.0。
11) 度数。
12) Checksum.(检查位)GPGSV(所示卫星格式)$GPGSV, <1>,<2>,<3>,<4>,<5>,<6>,<7>,?<4>,<5>,<6>,<7>,<8><CR><LF>1) 天空中收到讯号的卫星总数。
2) 定位的卫星总数。
3) 天空中的卫星总数,00 至12。
4) 卫星编号,01 至32。
5) 卫星仰角,OO 至90 度。
6) 卫星方位角,OOO 至359 度。
实际值。
7) 讯号噪声比(C/No),00 至99 dB;无表未接收到讯号。
8) Checksum.(检查位).第<4>,<5>,<6>,<7>项个别卫星会重复出现,每行最多有四颗卫星。
GPS测量原理及应用备课课件(最新)第五章:GPS定位原理

3).三差法: 原理:利用连续跟踪的所有载波相位测量观测值中均含 有相同的整周未知数N0,所以将相邻两个观测历元的载 波相位相减,就可将该未知参数消去,从而直接解出坐 标参数。 4). FARA 法--fast ambiguity resolution approach
原理:利用初始平差的解向量(接收机点的坐标及整周 未知数的实数解)及其精度信息(单位权中误差和方差协 方差阵),以数理统计理论的参数估计和统计假设检验为 基础,确定在某一置信区间整周未知数可能的整数解的组 合,然后依次将整周未知数的每一组合作为已知值,重复 地进行平差计算。其中使估值的验后方差或方差和为最小 的一组整周未知数即为整周未知数的最佳估值。
1
(X、Y、Z)
X、Y 、Z —— 测点点位坐标
Xi、Yi、Zi——卫星星历(坐标) 1、 1、 1 ——观测所得伪距(在 方程中是已知量)
2
GPS定位的基本原理
需解决的两个关键问题: --如何确定卫星的位置 --如何测量出站星距离
3
测距方法
双程测距
用于电磁波测距仪
单程测距
用于GPS
4
二.GPS定位方法分类
j (GPS)] cti
ct
j
c
j i
c ti
c t
j
ij
c ti
c t
j
上式当所卫确星定钟的与伪接距收即机为钟站严星格几同何步距时离(。 ti t j ),
13
通常GPS卫星的钟差可从卫星发播的导航电文中获得,
经钟差改正后,各卫星之间的时间同步差可保持在109 s
以内。如果忽略卫星钟差影响,并考虑电离层、对流层折
所以⑦式可写为:
顾及载波相位整周数,观测方程可写为:
GPS 数据格式

GPS 数据格式一、G GAGlobal Positioning System Fix Data. Time, Position and fix related data for a GPS receiver GPS定位数据,GPS接收机时间、位置和定位描述信息$--GGA, hhmmss.ss, llll.ll, a, yyyyy.yy, a, x, xx, x.x, x.x, M, x.x, M, x.x, xxxx*hh1 2 3 4 5 6 7 8 9 10 11 12 13 14 151.UTC时间2.纬度3.N或S(北纬或南纬)4.经度5.E或W(东经或西经)6.卫星质量因子0 - 未定位1 - GPS已定位2 - 差分GPS定位6 –位置推测模式定位7.有效卫星数(00~12)8.水平精度因子HDOP9.天线海拔高度10.天线海拔高度单位11.海平面相对大地椭球面的高度12.海平面相对大地椭球面的高度单位13.差分GPS数据时间(从上次定位开始算起),DGPS时无14.差分基准站ID号(0000-1023)15.校验值二、GSAGPS DOP and active satellitesGPS DOP和有效卫星$--GSA, a, a, x, x, x, x, x, x, x, x, x, x, x, x, x, x, x.x, x.x, x.x*hh1 2 3 4 5 14 15 16 17 181.选择模式M - 手动强制运行2D或3D模式A - 自动切换2D或3D模式2.定位模式1 - 未定位2 - 2D定位3 - 3D定位3.第1颗已定位的卫星ID号4.第2颗已定位的卫星ID号...14.第12颗已定位的卫星ID号15.PDOP 位置精度因子16.HDOP 水平精度因子17.VDOP 垂直精度因子18.校验值三、GSVSatellites in view可视卫星$--GSV, x, x, x, x, x, x, x, ...*hh1 2 3 4 5 6 7 81.本次GSV语句的总数目2.本条GSV语句是本次GSV语句的第几条3.可视卫星的总数4.卫星编号5.卫星仰角(最大90度)6.卫星方位角(0-359度)7.C/No值重复4-7项,每行最多有四颗卫星8.校验值四、RMCRecommended Minimum Navigation Information推荐定位信息$--RMC, hhmmss.ss, A, llll.ll, a, yyyyy.yy, a, x.x, x.x, xxxx, x.x, a*hh1 2 3 4 5 6 7 8 9 10 11 121.UTC时间2.状态A - 已定位V - 未定位3.纬度4.N或S(北纬或南纬)5.经度6.E或W(东经或西经)7.速率节8.方位度9.日期ddmmyy10.磁偏角度11.磁偏角方向,E或W(东或西)12.校验值五、VTGTrack Made Good and Ground Speed地面速度信息$--VTG, x.x, T, x.x, M, x.x, N, x.x, K*hh1 2 3 4 5 6 7 8 91.以真北为参考基准的地面航向2.T = True 真实3.以磁北为参考基准的地面航向4.M = Magnetic 磁极5.地面速率节6.N = Knots 节7.地面速率公里/小时8.K = Kilometres Per Hour 公里/小时9.校验值六、GLLGeographic Position – Latitude/Longitude地理位置――经度/纬度$--GLL, llll.ll, a, yyyyy.yy, a, hhmmss.ss, A*hh1 2 3 4 5 6 71.纬度2.N或S(北纬或南纬)3.经度4.E或W(东经或西经)5.UTC时间6.状态A - 已定位V - 未定位7.校验值七、ZDATime & Date – UTC, Day, Month, Year and Local Time Zone 时间和日期-UTC,日,月,年和本地时区$--ZDA, hhmmss.ss, xx, xx, xxxx, xx, xx*hh1 2 3 4 5 6 71.本地时间2.本地时区,00到+/-13小时3.年份4.月份,00到125.日期,00到316. UTC时间7.校验值。
常见GPS数据输出格式

下列命令描述了GPS 25导航仪的数据格式定义,包括波特率选择,秒脉冲输出,RTCM定义输出。
1、NMEA接收语句*GPS 25输入语句,主要为初始化,参数设置导通过RXP管脚(1)ALM(历书信息)格式:$GPALM、<1>、<2>、<3>、<4>、<5>、<6>、<7>、<8>、<9>、<10>、<11>、<12>、<13>、<14>、<15>、*hh<CR><LF>如果板上的备用电池耗完,用此语句初始化信息<1>在历书下传时能将历书总数传至GPS板上,当发送历书到GPS板上此字段可空或任意数。
<2>当前历书数20这个字段可为空或任意值;<3>卫星PRN数不清0到32<4>GPS星历数<5>SV状态,每个历书的17-24位<6>离心率<7>星历参考时间<8>倾角<9>上升速率<10>半轴<11>近地点的末端<12>节经度<13>近点离角<14>Afo 时间参数<15> Af1 时间参数hh:语句末端的hh为该语句的校检符,应由用户计算送给GPS 25板,计算规则为:“S”后的所有字节的8个计,每4个组成一个BCD码(A、B、C等应用大写)。
GPS 25输出,语句后均有校验位,用户可通过它,验证结果。
(2)初始化信息命令(仅在GPS 25上用)$PGRMI用来初始化板子设定卫星位置和时间该语句一般在裙位置和当前实际位置的距离超过800公里时使用,以回忆定位速度格式:$PGRMI$GPALM、<1>、<2>、<3>、<4>、<5>、<6>、*hh<CR><LF><1>纬度ddmm.mmm格式(初始化必须被写入板子)<2>纬度方向N或S<3>经度ddmm.mmm格式(初始化必须被写入板子)<4>经度方向E或N<5>当前UTC日期,kkmm yy格式<6>当前UTC时间hhmm ss格式(3)板子配置信息命令(仅用于GPS 25)$GPALM配置接收板上的参数,存储在备用电池上。
第五章 GPS卫星基本定位原理

G P S 测 量 原 理 及 应 用
周跳探测的基本思路
周跳探测的原理是建立在粗差定位的基础 上的。首先,由观测数据组成适当的检测量序 列,使得周跳在该检测量序列中以粗差的形式 表示出来。然后,检测该检测量序列中的粗差, 确定周跳的位置和大小。这样就要求在去掉检 测量序列的系统性变化后剩下的随机变化部分 要远远小于可能发生的最小周跳值。
观测历元 原始相位观测值 一次差 二次差 三次差 四次差
t1 t2 t3 t4 t5 t6 t7 t8
2
上式中,tr,1-α/2为显著水平为α,自由度为r(双 差浮点解平差中的多余观测数)的t分布密度函数的 双尾α分位值,当显著水平α 、自由度r确定以后, 其值可从分布表中查得。 设Ci为∇∆Νi 的所有取值可能个数,则∇∆Ν(n个 整周模糊度)
C =
∏
n
Ci
= C 1 × C 2 × L Cn
i=1
考虑电离层、对流层、钟差影响有:
Φ kj ( t i ) = f f f ρ kj ( t i ) + fδ tj − fδ tk − δρ 1 − δρ 2 + N kj c c c
整周未知数N 的确定(1/2) 5.3.3 整周未知数N0的确定(1/2)
G P S 测 量 原 理 及 应 用 N(t0): 未知的整周未知数 ϕ(ti): 相位差的小数部分 接收机记录 绿色部分为整周计数 接收机 记录
0
-2000000 18.8
19.0
19.2
Hrs
19.4
19.6
19.8
周跳产生的原因
G P S 测 量 原 理 及 应 用
建筑物或树木等障碍物的遮挡 电离层电子活动剧烈 多路径效应的影响 卫星信噪比(SNR)太低 接收机的高动态 Diffraction 接收机内置软件的设计不周全
GPS数据格式

GPS数据格式a.GPS固定数据输出语句($GPGGA)这是一帧GPS定位的主要数据,也是使用最广的数据。
$GPGGA 语句包括17个字段:语句标识头,世界时间,纬度,纬度半球,经度,经度半球,定位质量指示,使用卫星数量,水平精确度,海拔高度,高度单位,大地水准面高度,高度单位,差分GPS数据期限,差分参考基站标号,校验和结束标记(用回车符<CR>和换行符<LF>),分别用14个逗号进行分隔。
该数据帧的结构及各字段释义如下:$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xx<CR>< LF>$GPGGA:起始引导符及语句格式说明(本句为GPS定位数据);<1> UTC时间,格式为hhmmss.sss;<2> 纬度,格式为ddmm.mmmm(第一位是零也将传送);<3> 纬度半球,N或S(北纬或南纬)<4> 经度,格式为dddmm.mmmm(第一位零也将传送);<5> 经度半球,E或W(东经或西经)<6> 定位质量指示,0=定位无效,1=定位有效;<7> 使用卫星数量,从00到12(第一个零也将传送)<8> 水平精确度,0.5到99.9<9> 天线离海平面的高度,-9999.9到9999.9米M 指单位米<10> 大地水准面高度,-9999.9到9999.9米M 指单位米<11> 差分GPS数据期限(RTCM SC-104),最后设立RTCM传送的秒数量<12> 差分参考基站标号,从0000到1023(首位0也将传送)。
GPS数据的格式及说明
GPS数据的格式及说明我取得是$GPRMC这组数据,个人认为这组数据提供信息是比较详细的,而且在程序代码里好提取。
格式为:$GPRMC,010101.130, A, 3606.6834, N, 12021.7778, E, 0.0, 238.3, 010807,,,A*6C $GPRMC, <1>, <2>, <3>, <4>, <5>, <6>, <7>, <8>, <9>,<1> 当前位置的格林尼治时间,即世界时间,与北京时间差8个小时,格式为hhmmss.ms<2> 状态, A 为有效位置, V为非有效接收警告,即当前天线视野上方的卫星个数少于3颗。
<3> 纬度, 格式为ddmm.mmmm<4> 标明南北半球, N 为北半球、S为南半球<5> 径度,格式为dddmm.mmmm<6> 标明东西半球,E为东半球、W为西半球<7> 地面上的速度,范围为0.0到999.9<8> 方位角,范围为000.0到359.9 度<9> 日期, 格式为ddmmyy注意几点:1、当GPS数据有效时第17位(一般情况下,程序里最好是找第二个逗号在取下一位判断)为“A”,无效时为“V”;2、GPS有效时,当速度为0时显示0.0(两位数),当速度不为0时小数点前面数据根据情况变化,最大为三位,此处速度单位为节(海里),需要做处理才能得到我们习惯的单位(公里/小时);3、GPS无效时,除了第17位显示V以外,不输入速度,角度数据;4、当给GPS复位时第17位为V,不输出速度,角度,时间数据。
我了解的也就这么多了,有哪里说的不详细的可以直接问我。
加我QQ请加说明。
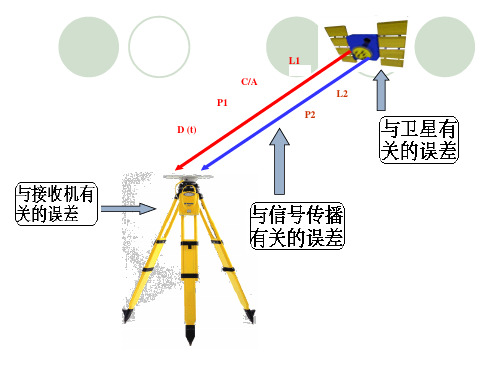
第五章GPS信号的误差
式中: fs ---卫星时钟的频率; f ---同类静止的时钟频率 ;
Vs ---卫星的运行速度; C0---真空光速。
若用GPS卫星的运行速度Vs=3874m/s,而 C0=299792458m/s,则可算得GPS卫星时 钟相对于地面同类时钟的频率之差是
测距码观测值:
d ion
C
40 .28 f2
s Ne ds
载波相位观测值:
dion
C
40 .28 f2
s Ne ds
将二者结合处理可基本消除电离层折射误
差的影响,使单频GPS接收机的测程扩大到
200Km左右。
(5)选择有利观测时段
时 延
0 4 8 12 16 20 24 地方时
对流层折射误差
3.减弱电离层影响的措施
(1)利用双频观测(对于双频接收机) 现令: dion= A / f2 对于双频接收机,可以同时接收两个载波信号。 则有: S = ρ1 + A / f12 ;
S = ρ2 + A / f22 ;
式上中的:PS码为信星号站进的行理测论量距分离别, ρ获1 得和的ρ伪2 为距对观两测个值载。波
GPS信号电离层折射率为: nGPS= 1+40.28Nef -2
GPS信号在电离层中传播速度为: Vg=C0/nGPS=C0(1-40.28Nef-2)
若伪距测量中信号的传播时间为Δt,那么 S=vg Δt= C0(1-40.28Nef-2) Δt = C0 Δt- C0 40.28Nef-2 Δt
但由于其能反映全球的平均状况,与各地的 实际情况必然会有一定的差异,所以其改正 效果仅能改正电离层折射误差的 75﹪左右。
怎样使用gps测量坐标数据格式

怎样使用GPS测量坐标数据格式简介全球定位系统(GPS)是一种用于确定地球上任何位置的导航系统。
它使用卫星信号来计算位置坐标,并可用于各种应用,如航海、地理测量和导航。
本文将介绍如何使用GPS来测量和识别坐标数据格式。
GPS坐标系统GPS使用一种特殊的坐标系统来表示位置。
常见的GPS坐标系统包括经纬度(latitude and longitude)和 Universal Transverse Mercator(UTM)坐标系统。
经纬度坐标经纬度坐标是最常见的GPS坐标系统,它使用地球表面上一个点与赤道和子午线的交点之间的角度来描述位置。
经度表示位置相对于本初子午线的东西方向,纬度则表示位置相对于赤道的北南方向。
例如,纽约市的经度为-74.0059度,纬度为40.7128度。
UTM坐标系统UTM坐标系统将地球划分为一系列以UTM带为单位的区域。
每个UTM带的宽度为6度,并具有特定的中央子午线。
UTM坐标是以米为单位的笛卡尔坐标,用于描述地球表面上的位置。
与经纬度坐标相比,UTM坐标更便于计算和测量。
GPS测量坐标数据格式GPS测量的坐标数据可以以多种格式进行表示,包括文本和二进制文件。
下面介绍几种常见的GPS坐标数据格式。
NMEA 0183NMEA(National Marine Electronics Association)0183是一种用于在GPS设备和其他导航设备之间传输坐标数据的标准。
它使用文本格式表示坐标数据,并包含了位置、时间、速度等信息。
NMEA 0183数据格式通常以ASCII文本的形式进行传输和存储。
一个典型的NMEA 0183坐标数据示例:$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47GPXGPX(GPS eXchange Format)是一种常见的XML格式,用于存储GPS坐标数据和相关信息。
GPS-第5讲 距离测量与GPS定位
2、重建载波的方法
互相关(交叉相关)
在不同频率的调制信号(卫星信号)进行相关处理 ,获取两个频率间的伪距差和相位差。
RL2 RL1,C / A (RL2 ,Y RL1,Y ) L2 L1,C / A (L2 L1 )
将L1、L2上调制的Y码(Y1、Y2)进行相关处理 ,用Y1去掉L2上的Y2,即可恢复L2载波。
φ λ ( X S X )2 (Y S Y )2 (Z S Z )2 N λ C dt C dT Vion Vtrop
1、同类型同频率观测值的线性组合—— 差分观测值
差分观测值的定义
将相同频率的GPS观测值依据某种方式求差所得 到的组合观测值(虚拟观测值)。
P码
Y码
W码
1(0)
P码=
-Y码
Y码
➢ Z跟踪技术:将接收机
P码
复制的P码在1个W码
元宽度内与卫星信号
W码
-1(1)
(Y码)进行相关处
Y码
理。
Z 跟踪法的优点:
➢ 无需了解Y码结构,可测定双频伪距观测值; ➢ 可获得卫星导航电文; ➢ 可获得全波长的L1和L2载波; ➢ 信号质量较平方法和互相关法好。
4、GPS测量的基本观测方程
~ρ C t C (tR T S )
C [(tR_GPS dt) (T S _GPS dT)]
C (tR_GPS T S _GPS ) C dt C dT
R C dt C dT Vion Vtrop
接收机钟差引 起的距离误差
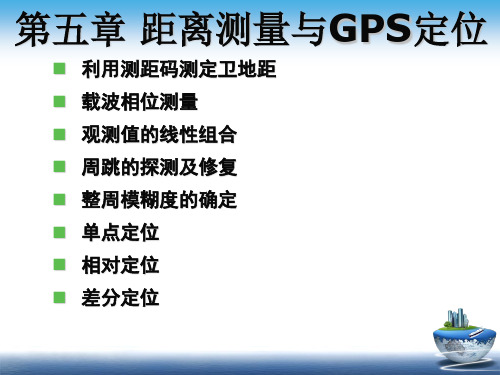
第五章 距离测量与GPS定位
利用测距码测定卫地距 载波相位测量 观测值的线性组合 周跳的探测及修复 整周模糊度的确定 单点定位 相对定位 差分定位
§5.1 利用测距码测定卫地距
《GPS测量原理及应用》第三版复习资料

第一章绪论1. GPS系统包括三大部分:空间部分——GPS卫星星座,地面控制部分——地面监控系统,用户设备部分——GPS信号接收机。
2 .GPS卫星星座部分:由21颗工作卫星和3颗在轨备用卫星组成GPS卫星星座,记作(21+3)GPS星座。
24颗在轨卫星均匀分布在6个轨道平面内,轨道倾角为55°,各个轨道平面之间相距60°。
在地球表面上任何地点任何时刻,在高度角15°以上,平均可同时观测到6颗卫星,最多可达9颗卫星。
3. GPS卫星的作用:第一,用L波段的两个无线载波向广大用户连续不断地发送导航定位信号。
第二,在卫星飞越注入站上空时,接收由地面注入站用S波段发送到卫星的导航电文和其他有关信息,并通过GPS信号电路,适时地发送给广大用户。
第三,接收地面主控站通过注入站发送到卫星的调度命令,适时地改正运行偏差或启用备用时钟等。
4. 地面监控系统:1个主控站(美国科罗拉多)3个注入站(阿森松岛,迪哥加西亚岛,卡瓦加兰)5个监控站(1+3+夏威夷)5. GPS信号接收机的任务是:能够捕获到按一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,对所接收到的GPS信号进行变换、放大和处理,以便测量出GPS信号从卫星到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,实时地计算出测站的三维位置,甚至三维速度和时间。
6. GPS系统的特点:定位精度高,观测时间短,测站间无需通视,可提供三维坐标,操作简便,全天候作业,功能多,应用广。
7. GPS系统的应用前景:①用于建立高精度的国家性大地测量控制网,测定全球性的地球动态参数②用于建立陆地海洋大地测量基准,进行高精度的海岛陆地联测以及海洋测绘③用于监测地球板块运动状态和地壳形变④用于工程测量,成为建立城市与工程控制网的主要手段⑤用于测定航空航天摄影瞬间的相机位置.8. 我国的GPS定位技术的应用和发展情况:在大地测量方面,利用GPS技术开展国际联测,建立全球性大地控制网,提供高精度的地心坐标,测定和精化大地水准面;在工程测量方面,应用GPS静态相对定位技术,布设精密工程控制网,用于城市和矿区油田地面沉降监测、大坝变形监测、高层建筑变形监测、隧道贯通测量等精密工程;在航空摄影测量方面,我国测绘工作者也应用GPS技术进行航测外业控制测量、航摄飞行导航、机载GPS 航测等航测成图的各个阶段;在地球动力学方面,GPS技术用于全球板块运动监测和区域板块运动监测;此外,GPS技术还用于海洋测量、水下地形测绘、军事国防、智能交通、邮电通信、地矿、煤矿、石油、建筑以及农业、气象、土地管理、环境监测、金融、公安等部门和行业。
GPS数据格式

Global Positioning System Fix Data(GGA)GPS定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF><1>标准定位时间,UTC时间,hhmmss(时分秒)格式<2>纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<3>纬度半球N(北半球)或S(南半球)<4>经度dddmm.mmmm(度分)格式(前面的0也将被传输)<5>经度半球E(东经)或W(西经)<6>定位质量GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算<7>正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)<8> HDOP水平精度因子(0.5~99.9)精度百分比<9>海拔高度(-9999.9~99999.9)高度单位<10>地球椭球面相对大地水准面的高度高度单位<11>差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12>差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)*hh校验和,即接收字符串的校验和:65,从$到*之间的所有ASCII码的异或校验和<CR><LF>终止位CR回车,LF换行一个完整的NEMA0183语句是从起始符“$GPGGA”到终止符“<CR><LF>”为止的一段字符串。
需要掌握的信息是经纬度、经纬度方向、GPS定位状态和接收信号的时间。
所以当接收到这样一个完整的NEMA0183语句时,提取有用信息的方法是:先判定起始符$GPGGA的位置,从起始符开始读人数据,再通过异或校验后的语句中寻找字符“,”,然后截取前后两个“,”之间的字符(串)获得所关心的数据,并以回车符为一个CPS语句的终止符,得到一个完整的GPS信号。
第五章-GPS卫星定位基本原理

那么,延迟时间 即为GPS卫星信号从卫星传播
到GPS接收机的时间 。使 R( ) 1 实际上是不可能
的,只能使 R( ) max ,两种码不可能完全对齐, 导致时间有误差。
码相关
c t
卫星定位的实际方法:是要同时观测四颗以上卫 星来确定地面点的位置。
S
ρ1 ρ2
P1
监测方法:
已知:(X,Y,Z)i, i=1,2,3
ρ3
观测:ρ1,ρ2,ρ3
P3 计算:(X,Y,Z)s
P2
2、测站的位置:
GPS 卫星发射测距信号 和导航电 文,导航电文中含 有卫星的位置信息。
监测方法: 如果测距无误差,
S2
S3 S1
ρ2
ρ1
ρ3
已知:(X,Y,Z)s, s=1,2,3
4、根据定位时接收机的运动状态分为: 静态定位
就是在整个观测过程中,接收机的位置是不变 的。(接收机的位置是一个不随时间变化的量) 动态定位
就是在整个观测过程中,接收机的位置是变化 的(接收机的位置是一个随时间变化的量)
返回
§5.2 伪距测量 一、伪距测量的概念
伪距法定位:是由GPS接收机在某一时刻测出四颗 以上的GPS卫星的伪距以及已知的卫 星位置,采用空间距离后方交会的方 法求定天线所在点的三维坐标。
N
(以周为单位)
(
N
N
)
j k
在初始时刻 t0,载波相位的观测值:
j k
(t0
)
k
(t0 )
j k
(t0
怎样使用gps测量坐标数据格式是否正确
怎样使用GPS测量坐标数据格式是否正确
在进行地理位置定位和导航时,GPS(Global Positioning System)是一项重要的技术。
它通过一系列卫星定位系统来收集地球上点的坐标数据,并将其转化为特定的数据格式。
然而,在使用GPS测量坐标数据时,我们有时会遇到数据格式不正确的情况。
本文将介绍一些方法,帮助您使用GPS测量坐标数据时在线检测格式是否正确。
1. 了解GPS坐标数据格式
GPS坐标数据通常有两种格式:经度-纬度格式和坐标系格式。
经度-纬度格式
经度-纬度格式是最常用的GPS坐标表示方式。
它使用度(°)来表示经度和纬度。
经度的取值范围为-180°到180°之间,纬度的取值范围为-90°到90°之间。
例如,一个位于纽约市的位置可以表示为40.7128°N,74.0060°W。
坐标系格式
坐标系格式指的是将GPS坐标数据投影到具体的地图上。
常见的坐标系包括WGS 84(World Geodetic System 1984)和GCJ 02(国测局坐标系 2002)等。
WGS 84是国际标准的坐标系,而GCJ 02是中国国家测绘局使用的坐标系。
2. 使用在线工具检测数据格式
有许多在线工具可用于检测GPS坐标数据格式是否正确。
您可以通过以下步骤使用这些工具:
步骤1:复制坐标数据
首先,复制您的GPS坐标数据。
确保数据格式正确,不包含任何多余的字符或空格。
步骤2:选择在线工具
在搜索引擎中搜索。
GPS输出数据格式

W
东(E)半球或西(W)半球
对地速度
0.13
节 0.0 至 1851.8 节
对地方向
309.62
度 实际值
日期
120598
日日月月年年Leabharlann 磁极变量(1)度 东(E)半球或西(W)半球
总和检查码
*10
<CR> <LF>
讯息终点
1. SiRF公司目前不支持磁极变量,所有对地方向数据是以大地测量WGS84为方向。
10
讯息终点
8
注意!第<4>,<5>,<6>,<7>项个别卫星会重复出现,每行最多有四颗卫星。其余卫星信息会于次一 行出现,若未使用,这些字段会空白。
4.1.5 建议最起码的GNSS规格数据(RMC)
输出范例:
$GPRMC,161229.487,A,3723.2475,N,12158.3416,W,0.13,309.62,120598, ,*10 表 4-9 RMC 数据格式
3
GPS PPS 格式(PPS为军用格式),已定位
4.1.2 含经、纬度的地理位置(GLL)
输出范例:
$GPGLL,3723.2475,N,12158.3416,W,161229.487,A*2C
表 4-4 GLL 数据格式 名称
讯息代号 纬度 北半球或南半球指示器 经度 东半球或西半球指示器 标准定位时间 状态 总和检查码
海拔高度
9.0
米 -9999.9 至 99999.9 米
单位
M
米
地表平均高度
米 -999.9 至 9999.9 米
单位
M
米
差分修正DGPS
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一天内的文件序 号(时段号), 为0~9,A~Z。 若为0,则表示 文件包含当天的 所有观测数据
两位年号 98:1998 00.02o,wh022293.02n
10
文件结构
• 组织形式
– 按节、记录(行)、字段和列 – 所有文件均分为两节:文件头和数据记录 – 每个记录占一行,不超过80列宽 – 文件头中每个记录的第61~80列为标签,说明 记录内容
17
文件格式说明
• RINEX气象数据文件的内容
文 件 头 文 件 体
2.10 METEOROLOGICAL DATA 气象数据 XXRINEXM V9.9 AIUB 类型数及 EXAMPLE OF A MET DATA FILE A 9080 排列顺序 3 PR TD HR PAROSCIENTIFIC 740-16B HAENNI 一个历元 ROTRONIC I-240W 的数据记 0.0 0.0 0.0 3-APR-96 00:10 RINEX VERSION / TYPE PGM / RUN BY / DATE COMMENT MARKER NAME # / TYPES OF OBSERV 0.2 PR SENSOR MOD/TYPE/ACC 0.1 TD SENSOR MOD/TYPE/ACC 5.0 HR SENSOR MOD/TYPE/ACC 1234.5678 PR SENSOR POS XYZ/H END OF HEADER
6 99
-.839701388031D-03 .934062500000D+02 .626740418375D-02 -.242143869400D-07 .326593750000D+03 .000000000000D+00 .000000000000D+00 .000000000000D+00 .490025617182D-03 .204636307899D-11 .000000000000D+00 -.963125000000D+02 .146970407622D-08 .292961152146D+01 .200239347760D-02 .928156077862D-05 .515328476143D+04 -.279396772385D-07 .243031939942D+01 -.558793544769D-07 .271187500000D+03 -.232757915425D+01 -.619632953057D-08 .000000000000D+00 .102500000000D+04 .000000000000D+00 .000000000000D+00 .000000000000D+00 .389000000000D+03 .000000000000D+00
6
RINEX格式概况①
• 定义
– 与接收机无关的数据交换格式/Receiver INdependent Exchange
• 历史
– 1989年由Astronomical Institute, University of Berne 的Werner Gurtner提出了第一个版本,当时的目的是处 理EUREF 89数据,现已发展至3.00版
• 历史
– 1985年美国NGS(National Geodetic Survey) 公布SP1、ECF1、SP2、ECF2 – 1989年加入EF13 – 以上格式均未考虑卫星钟信息 – 1989年提出SP3、ECF3和EF18,1991年正式 发布 20
概述
• 存储方式
– ASCII
• 内容
– 精密星历(每隔15分钟给出1个卫星的位置、 钟差(P型),有时还给出卫星的速度、钟漂 (V型))
历数据
文 件 体
9 2 17 51 44.0 .910000000000D+02 .484101474285D-05 .409904000000D+06 .111541663136D+01 .307155651409D-09 .000000000000D+00 .406800000000D+06 13 99 9 2 19 0 0.0 .133000000000D+03 -.498816370964D-05 .414000000000D+06 .110192796930D+01 -.785747015231D-11 .000000000000D+00 .410400000000D+06
录
96 96 96
4 4 4
1 1 1
0 0 0
0 15 0 30 0 45
987.1 987.2 987.1
10.6 10.9 11.6
89.5 90.0 89.0
18
2. SP3格式
19 ©2005~2012. 黄劲松 武汉大学 测绘学院
概述
• 定义
– Standard Product #3 – 一种精密星历格式,IGS精密星历采用此格式
• 特点
– 提供精密星历
21
命名规则
• 命名方法: 8+3文件名 • 命名规则
tttwwwwd.sp3
精密星历的 类型 GPS周 总为sp3 星期 0:星期日 1~6:星期一 ~ 星期六
文
5. GEO导航电文文件:增强系统中搭载有类GPS信号
发生器的地球同步卫星(GEO)的导航电文
6. 卫星和接收机钟文件:卫星和接收机时钟信息的
9
命名规则
• 命名方法:8+3文件名 • 命名规则 ssssdddf.yyt
4字符测站名 年积日 文件类型 O:观测值 N:星历 M:气象数据 G:GLONASS星历 H:同步卫星GPS载 荷的导航电文 C:钟文件
11
文件结构
• 观测值文件结构
12
文件结构
• GPS导航电文文件结构
13
文件结构
• 气象数据文件结构
14
文件格式说明
• 格式说明符
15
文件格式说明
• RINEX观测值文件的内容
RINEX版 文件头内 容 本号 数据类型 观测值类 型 文件头标 签
2.10 OBSERVATION DATA M (MIXED) 点名 BLANK OR G = GPS, R = GLONASS, T = TRANSIT, M = MIXED 点号 XXRINEXO V9.9 AIUB 24-MAR-01 14:43 EXAMPLE OF A MIXED RINEX FILE 接收机编 A 9080 天线编号、 号、类型、 9080.1.34 近似坐标 类型 版本 BILL SMITH ABC INSTITUTE 天线偏心 X1234A123 XX ZZZ 缺省的波 234 YY 长因子 与缺省情 587466. 4375274. 4589095. 况不同的 .9030 .0000 .0000 观测值类 1 波长因子 1 历元间隔 1 型及排列 6 2 G14 G15 G16 G17 G18 G19 0 顺序 4 历元时刻 P1 L1 L2 P2 卫星数及 一个历元 18.000 卫星列表 各卫星的 2001 的观测数 3 24 13 10 36.0000000 RINEX VERSION / TYPE COMMENT PGM / RUN BY / DATE COMMENT MARKER NAME MARKER NUMBER OBSERVER / AGENCY REC # / TYPE / VERS ANT # / TYPE APPROX POSITION XYZ ANTENNA: DELTA H/E/N WAVELENGTH FACT L1/2 WAVELENGTH FACT L1/2 RCV CLOCK OFFS APPL # / TYPES OF OBSERV 接收机钟 INTERVAL 差 TIME OF FIRST OBS END OF HEADER -.123456789 23629364.158 20891541.292 20607605.848
• 存储方式
– ASCII/文本文件
7
RINEX格式概况②
• 内容
– – – – – 观测值 星历(导航信息) 气象数据 钟数据 …
• 特点
– 通用性强,已成为GPS测量领域事实上的标准 – 大多数软件能够直接处理 – 利于多种型号的接收机联合作业
8
文件类型
1. 2. 3. 4. 观测数据文件:GPS观测值 导航电文文件:GPS卫星导航电文 气象数据文件:在测站处所测定的气象数据 GLONASS导航电文文件:GLONASS卫星导航电
文 件 头
观测值 据
文 件 体
01 3 24 13 10 36.0000000 0 3G12G 9G 6 23629347.915 .300 8 -.353 20891534.648 -.120 9 -.358 20607600.189 -.430 9 .394 01 3 24 13 10 50.0000000 4 4 1 2 2 G 9 G12 *** WAVELENGTH FACTOR CHANGED FOR 2 SATELLITES *** NOW 8 SATELLITES HAVE WL FACT 1 AND 2! 01 3 24 13 10 54.0000000 0 23619095.450 -53875.632 20886075.667 -28688.027 20611072.689 18247.789 21345678.576 12345.567 22123456.789 23456.789 5G12G 9G 6R21R22 8 -41981.375 9 -22354.535 9 14219.770 5 5
WAVELENGTH FACT L1/2 COMMENT COMMENT COMMENT -.123456789 23619112.008 20886082.101 20611078.410