多功能辅助救援机器人设计说明书
多功能辅助救援机器人设计说明书
多功能辅助救援机器人设计说明书【多功能辅助救援机器人设计说明书】设计说明书目录1. 引言2. 设计背景3. 机器人功能和特点4. 机器人体系结构5. 机器人硬件设计5.1 机器人外观设计5.2 机械结构设计5.3 传感器系统设计6. 机器人软件设计6.1 控制算法设计6.2 路径规划与导航系统设计6.3 人机交互界面设计7. 机器人救援应用场景8. 总结与展望1. 引言本设计说明书旨在介绍一款多功能辅助救援机器人的设计原理和详细技术规格。
该机器人通过结合先进的硬件和软件技术,实现了在紧急救援、灾害场景以及其他危险环境中提供有效帮助的功能。
2. 设计背景灾害和紧急情况频繁发生,为保护人员的生命安全,提高救援效率,开发一种多功能辅助救援机器人势在必行。
该机器人能适应不同的救援任务,能够执行搜救、扫描、信息收集、物资运输等多种任务,以帮助减少人员风险。
3. 机器人功能和特点本机器人具备以下核心功能:- 搜救能力:能够根据预设目标进行定位和搜救任务,提供实时图像和声音反馈。
- 环境探测:通过传感器系统感知环境,提供温度、湿度、气体浓度等相关信息。
- 物资运输:具备承载货物和物资的结构设计,并能够在复杂环境中稳定运输。
- 人机交互:通过友好的界面设计,与用户进行简单有效的交互和指令传达。
4. 机器人体系结构本设计采用分层体系结构,包括控制层、感知层和执行层。
控制层负责决策和控制机器人移动、任务执行;感知层通过传感器感知环境、采集数据;执行层根据控制层和感知层的指令执行对应任务。
5. 机器人硬件设计5.1 机器人外观设计机器人外观设计追求紧凑、轻便和易操作的原则,采用金属材质、流线型造型,并配备防护装置,提高其耐用性和适应能力。
5.2 机械结构设计机械结构设计以实现多功能为目标,通过关节和伺服驱动实现机器人的运动和抓取功能。
机械结构采用轻量化、高强度材料,并应具有抓取力和负载能力。
5.3 传感器系统设计传感器系统设计包括视觉传感器、声音传感器、温湿度传感器和气体浓度传感器等。
智能救援机器人的说明书

智能救援机器人的说明书一、引言智能救援机器人是一款高度智能化的设备,旨在应对紧急救援和灾害救援的需求。
本说明书将详细介绍智能救援机器人的功能、操作方式和注意事项等内容,以便用户正确并安全地使用该设备。
二、技术参数1. 外观尺寸:长 x 宽 x 高2. 重量:xxx 克3. 工作温度范围:-20℃至 50℃4. 动力系统:电池/充电器5. 通信方式:xxx6. 导航方式:xxx7. 最大行进速度:xxx 米/秒8. 工作时间:xxx 小时9. 防水等级:IP67三、功能介绍1. 搜索与救援智能救援机器人搭载先进的图像识别系统和传感器,能够准确地搜索被困人员,并快速定位其位置。
机器人还配备了携带器具,可用于紧急救援行动。
2. 监测与报警该机器人具备监测环境的能力,可通过传感器实时监测气体浓度、温度、湿度等参数。
一旦发现异常状况,智能救援机器人将迅速发出警报并提醒相关人员采取相应措施。
3. 语音交流与通信机器人配有高保真音箱和麦克风,可进行双向语音通信。
用户可以通过机器人发送语音指令或进行远程指挥,使救援行动更加高效和准确。
4. 物资携带与送达智能救援机器人拥有足够的载重能力,可以携带救援物资,如食品、药品、急救工具等。
它能够快速而安全地将这些物资送达给被困人员,提供急需的援助。
5. 自主避障与导航机器人采用激光雷达和红外传感器等技术,能够实现自主避障和规划最优路径。
即使在复杂的环境下,智能救援机器人也能够灵活应对,并顺利抵达目的地。
四、使用指南1. 起动与关机(详细说明如何启动和关闭机器人,包括电源按钮、充电方式等)2. 操作界面(详细介绍机器人的操作界面,包括触摸屏显示等)3. 故障排除(列举常见故障及解决方法,并提醒用户在遇到无法解决的故障时及时联系售后服务)4. 注意事项- 在使用机器人前,请仔细阅读本说明书并按照指引正确操作。
- 请避免将机器人暴露在高温或低温环境中,并避免机器人接触水分。
- 请勿在机器人的触摸屏上使用尖锐物品或过于剧烈地点击。
地震救援机器人设计说明书
地震救援机器人设计说明书所在学校:昆明理工大学所在学院:机电工程学院项目成员:黄青青杨正利李超杨帆指导教师: 吴海涛地震救援机器人设计说明书目录一.作品简介 (1)二.主要功能指标 (2)三.工作原理 (3)四.运动分析 (4)五.实现的可能性 (6)六.创新点 (6)七.应用前景 (6)八.作品部分片 (7)九.参考文献 (9)一.作品简介地震救援机器人是基于地震救灾为背景而设计研发的,是一种能够起清障作用、探索救援道路的先进设备。
该作品具有灵活、操作简便、适用性强、拓展功能多的特点,非常适用于救灾抢险工作。
高度智能化和自动化是本作品的又一大特点,也是具备强势竞争力的一大优势。
同时,采用了先进的控制系统和算法,是系统的通用性和适用性进一步增强,能够出色完成各项任务。
本作品由中心搭载平台,六条安装在平台左右两侧的机械腿,以及构建在平台上的挖掘机械手组成。
机械腿由关节电机带动实现腿部移动,由安装在左右两侧的齿轮和连杆机构实现腿部伸缩,左右两侧各三条腿依次移动后,机器人的整体也完成一次前移。
达到预定位置后由平台上的气泵带动整个挖掘装置的完成挖掘动作,起到了除障清路的作用。
同时腿部结构设计比较先进,使机械体具有一定的越障能力,摆脱了传统救灾设备在灾后道路上行动能力不足的缺陷,对灾区环境有很强的适应能力。
二.主要功能指标该机器人是着眼于地震灾区的各类救援任务而开发的,其独树一帜的外形设计和结构设计使其能够遂行地震灾区的各种搜救、援助、运输、支承等任务。
首先,机器人的中心搭载平台采用模块化设计,可以根据实际任务需要即时更换设备进行搜救工作。
机器人腿部结构设计比较先进,使机械体具有一定的越障能力,能够更好地适应灾后的地形地貌以及道路情况,能够在一定程度上避免救援人员在危险区域受到潜在威胁,可以在最短时间开辟救援通道,最大限度的提高灾区被困者的解救及存活概率。
其次,在执行援助任务时,通过对机器人的中心搭载平台进行面积优化工作,令其携带不同的人物模块组件,以执行不同情况下的援助任务。
六轮式多功能智能抢险机器人的设计
六轮式多功能智能抢险机器人的设计1. 引言1.1 研究背景目前,智能抢险机器人的发展已经取得了显著进展,各种类型的机器人陆续亮相,其在灾难抢险中的作用越来越受到重视。
现有的机器人在一些极端环境下仍然存在不足,比如复杂地形、恶劣气候等条件下的应用效果有待提高。
设计一种具有六轮式多功能的智能抢险机器人,将有助于弥补现有机器人的不足,提高其适应复杂环境的能力,并进一步提升抢险救灾的效率和准确性。
为此,本文将重点研究六轮式多功能智能抢险机器人的设计原则、主要功能、结构设计及应用场景,以期为智能抢险机器人的发展提供有益的参考和借鉴。
【研究背景结束】1.2 研究目的研究目的是为了设计一款六轮式多功能智能抢险机器人,旨在提高抢险救灾工作的效率和安全性。
通过对智能抢险机器人的发展历史进行梳理,我们可以更好地了解该领域的研究现状和趋势,为我们的设计提供参考和借鉴。
明确六轮式多功能智能抢险机器人的设计原则,可以为我们的设计提供指导,确保机器人具有高效、稳定和灵活的工作性能。
探讨六轮式多功能智能抢险机器人的主要功能,将有助于我们更加全面地了解机器人的应用领域和潜在功能。
设计合理的结构和系统,将有助于确保机器人在复杂环境下正常运作,并提高机器人的适应性和稳定性。
分析六轮式多功能智能抢险机器人的应用场景,将有助于我们更好地理解机器人在实际工作中的体现和价值,以及未来的发展方向。
通过本研究,我们旨在为抢险救灾工作提供更为智能、高效的技术支持,提升救援效率和成功率。
2. 正文2.1 智能抢险机器人的发展历史智能抢险机器人是一种集成了各种先进技术的特种机器人,主要用于应对突发事件和救援工作。
其发展历史可以追溯到20世纪50年代,当时的机器人技术处于起步阶段,仅能执行简单的任务。
随着科技的不断进步,智能抢险机器人逐渐发展起来。
在20世纪80年代,随着计算机和传感技术的发展,智能抢险机器人开始具备了一定的智能,能够执行更复杂的任务,如搜索救援、火灾扑救等。
六轮式多功能智能抢险机器人的设计

六轮式多功能智能抢险机器人的设计随着科技的不断进步与发展,人类开始逐渐把越来越多的工作交给智能机器人来完成。
在抢险救灾等紧急情况下,智能机器人更是具有无可比拟的优势。
为了更好地应对各种抢险救灾任务,设计一款兼具灵活性、多功能性、智能化的六轮式多功能智能抢险机器人,无疑能够为人们的生命和财产安全提供更有效的保障。
一、机器人的外观设计六轮式多功能智能抢险机器人的外观设计应该符合人体工程学和实际抢险救灾需求。
机器人整体应该具备轻巧灵活的特点,外壳材料应该采用坚固耐用的复合材料制作,具备一定的防水、防尘性能。
外形设计应该圆滑流线型,避免因为尖锐边角而导致的损坏或卡顿等问题。
机器人的尺寸要适中,可以在狭窄的环境下自如穿行,对于紧急情况的救援和搜救任务具有明显的优势。
二、机器人的主要功能1. 执行搜索与搜救任务:机器人配备高清晰度摄像头及红外线摄像头,搭载红外线扫描仪和超声波平台,能够在夜间或者低能见度环境下完成搜索和搜救任务,并且可以实现远程遥控。
2. 执行救援任务:机器人配备两个机械臂,具有抓取、搬运和拉扯等功能,能够协助人类救援人员完成抢险救灾任务。
3. 执行信息搜集与传输任务:机器人配备各种传感器,能够实时采集环境信息,并且配有无线通信设备,能够将搜集到的信息传输至指挥中心。
4. 自主导航任务:机器人搭载高精度定位系统,能够自主完成复杂的室内外环境的导航任务,提高工作效率。
5. 执行临时电源供应任务:机器人配备高容量可充电锂电池,能够为受灾地区提供一定的电力供应,满足紧急情况下的供电需求。
三、机器人的智能控制为了能够更好地满足复杂多变的抢险救灾任务需求,六轮式多功能智能抢险机器人应该配备高效智能的控制系统。
控制系统应该具备人机交互界面,具有图像识别、语音识别和手势识别等功能,能够实现人机远程交互。
控制系统应该具备自主学习和自主规划的能力,能够根据任务需求和环境变化自主调整行动方案,并且有一定的自我维护和自我修复能力,以提高机器人的稳定性和可靠性。
地震救援机器人设计说明书
地震救援设计说明书地震救援设计说明书1. 引言1.1 目的本文档旨在提供地震救援的设计说明,以指导设计团队在开发地震救援时的工作。
1.2 范围本文档涵盖了地震救援的设计概念、结构、功能、性能要求、控制系统、通信系统、电力系统、机械系统等方面的内容。
2. 设计概念2.1 多功能性地震救援应具备多种功能,如探测受困人员、运送救援物资、提供紧急救护等。
2.2 高灵活性地震救援应具备良好的机动性和适应性,能够在复杂的地震环境中自由移动和工作。
2.3 高稳定性地震救援应具备稳定的结构和平衡系统,以应对地震环境的不稳定性。
3. 结构设计3.1 框架地震救援的框架应采用轻量化的材料,如碳纤维复合材料,以提高的机动性。
3.2 运动系统地震救援应配备足够的运动轮和驱动装置,以保证其在不平坦的地震场地上能够稳定移动。
3.3 传感器系统地震救援应搭载各种传感器,如摄像头、红外线传感器、气体传感器等,以实时探测受困人员和危险环境。
3.4 操作系统地震救援应配备智能操作系统,能够根据环境和任务要求做出自主决策和行动。
4. 功能设计4.1 人员搜索与定位功能地震救援应能够通过传感器探测受困人员的位置,并在地震场地中准确定位受困人员的位置。
4.2 物资运输功能地震救援应具备搬运和运输救援物资的能力,以满足救援需求。
4.3 紧急救护功能地震救援应配备基本的急救设备,如急救箱、心电图仪等,能够对受伤或生命体征不稳定的人员进行紧急救护。
5. 性能要求5.1 最大移动速度地震救援的最大移动速度应满足紧急救援的需要,同时考虑到稳定性的要求。
5.2 工作时间地震救援的电力系统应能够支持长时间的工作,以保证救援任务的顺利进行。
5.3 载重能力地震救援的载重能力应能够满足运送救援物资的需求,同时考虑灵活性的要求。
6. 控制系统设计6.1 远程控制地震救援应具备远程控制功能,以便操作人员对其进行远程操控和指导。
6.2 自主控制地震救援应具备自主控制功能,能够根据环境和任务要求做出自主决策和行动。
救援机器人毕业设计

救援机器人毕业设计
随着自然灾害和人为事故的频繁发生,救援机器人逐渐成为重要的援助工具。
本篇毕业设计旨在设计一种多功能的救援机器人,以便在各种紧急情况下提供必要的援助。
设计思路:
1. 结构设计:
救援机器人的结构需要面对各种不同的环境,包括火灾、地震、洪水等。
因此,它的结构需要具有耐高温、防水、防震等特性。
机器人装备有多个机械臂,能够在不同的场景下进行有效的操作,例如搜寻被困者、拯救伤员等。
2. 传感器设计:
救援机器人装配有多种传感器,包括温度传感器、气体传感器、声音传感器等。
这些传感器能够帮助机器人辨识出各种环境中的问题,并提供相关的信息。
例如,在火灾中,机器人可以利用传感器来检测房屋内的温度和任何潜在的危险。
3. 程序设计:
机器人需要具有一定的智能,能够根据环境的变化做出正确的反应。
机器人配备了多个算法,例如对象检测、运动规划等,能够在不同的场景下做出正确的决策。
4. 发电机:
机器人配备了太阳能发电机,以保证在没有电力供应的情况下,机器人仍能正常运作。
此外,机器人还配备了备用电池,以提供额外的能量储备。
结论:
在救援工作中,救援机器人可以发挥重要作用。
设计一种多功能的救援机器人,能够帮助消防员、医生等工作人员有效地解决紧急情况下的问题。
在未来,随着技术的发展,救援机器人将会变得更加先进和智能化。
六轮式多功能智能抢险机器人的设计
六轮式多功能智能抢险机器人的设计六轮式多功能智能抢险机器人是一种基于人工智能和机器人技术的智能化设备,能够快速响应抢险救援任务,对恶劣环境进行检测和处理,实现多项功能,适用于各种复杂的场景。
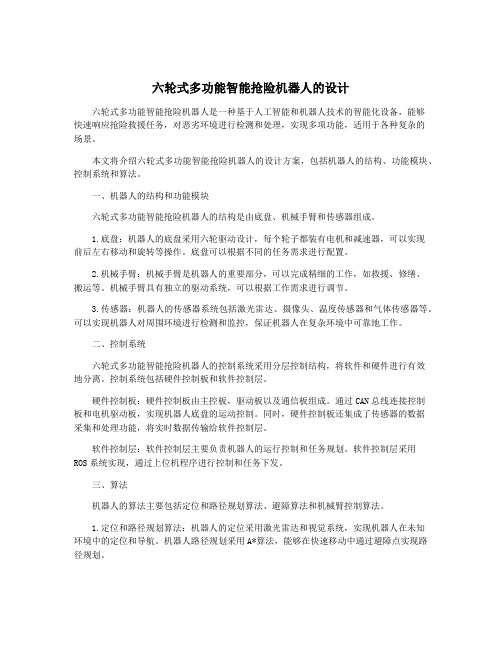
本文将介绍六轮式多功能智能抢险机器人的设计方案,包括机器人的结构、功能模块、控制系统和算法。
一、机器人的结构和功能模块六轮式多功能智能抢险机器人的结构是由底盘、机械手臂和传感器组成。
1.底盘:机器人的底盘采用六轮驱动设计,每个轮子都装有电机和减速器,可以实现前后左右移动和旋转等操作。
底盘可以根据不同的任务需求进行配置。
2.机械手臂:机械手臂是机器人的重要部分,可以完成精细的工作,如救援、修缮、搬运等。
机械手臂具有独立的驱动系统,可以根据工作需求进行调节。
3.传感器:机器人的传感器系统包括激光雷达、摄像头、温度传感器和气体传感器等。
可以实现机器人对周围环境进行检测和监控,保证机器人在复杂环境中可靠地工作。
二、控制系统六轮式多功能智能抢险机器人的控制系统采用分层控制结构,将软件和硬件进行有效地分离。
控制系统包括硬件控制板和软件控制层。
硬件控制板:硬件控制板由主控板,驱动板以及通信板组成。
通过CAN总线连接控制板和电机驱动板,实现机器人底盘的运动控制。
同时,硬件控制板还集成了传感器的数据采集和处理功能,将实时数据传输给软件控制层。
软件控制层:软件控制层主要负责机器人的运行控制和任务规划。
软件控制层采用ROS系统实现,通过上位机程序进行控制和任务下发。
三、算法机器人的算法主要包括定位和路径规划算法、避障算法和机械臂控制算法。
1.定位和路径规划算法:机器人的定位采用激光雷达和视觉系统,实现机器人在未知环境中的定位和导航。
机器人路径规划采用A*算法,能够在快速移动中通过避障点实现路径规划。
2.避障算法:机器人的避障采用激光雷达和视觉系统实现环境感知,结合避障算法实现机器人的自主导航与避障,提高机器人的安全性和工作效率。
3.机械臂控制算法:机械臂控制算法采用PID算法实现,提高机械臂的精度和稳定性,能够实现对复杂环境中各种工具和设备的操作。
六轮式多功能智能抢险机器人的设计
六轮式多功能智能抢险机器人的设计
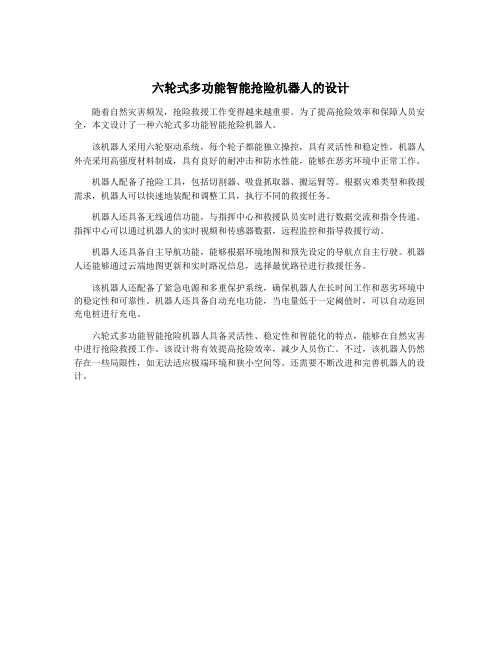
随着自然灾害频发,抢险救援工作变得越来越重要。
为了提高抢险效率和保障人员安全,本文设计了一种六轮式多功能智能抢险机器人。
该机器人采用六轮驱动系统,每个轮子都能独立操控,具有灵活性和稳定性。
机器人外壳采用高强度材料制成,具有良好的耐冲击和防水性能,能够在恶劣环境中正常工作。
机器人配备了抢险工具,包括切割器、吸盘抓取器、搬运臂等。
根据灾难类型和救援需求,机器人可以快速地装配和调整工具,执行不同的救援任务。
机器人还具备无线通信功能,与指挥中心和救援队员实时进行数据交流和指令传递。
指挥中心可以通过机器人的实时视频和传感器数据,远程监控和指导救援行动。
机器人还具备自主导航功能,能够根据环境地图和预先设定的导航点自主行驶。
机器人还能够通过云端地图更新和实时路况信息,选择最优路径进行救援任务。
该机器人还配备了紧急电源和多重保护系统,确保机器人在长时间工作和恶劣环境中的稳定性和可靠性。
机器人还具备自动充电功能,当电量低于一定阈值时,可以自动返回充电桩进行充电。
六轮式多功能智能抢险机器人具备灵活性、稳定性和智能化的特点,能够在自然灾害中进行抢险救援工作。
该设计将有效提高抢险效率,减少人员伤亡。
不过,该机器人仍然存在一些局限性,如无法适应极端环境和狭小空间等。
还需要不断改进和完善机器人的设计。
多功能履带式机器人设计

多功能履带式设计设计说明书:多功能履带式1.引言本文档旨在提供关于多功能履带式的详细设计说明。
该具有广泛的应用,可用于各种场合,如工业生产、建筑施工、救援和勘探等。
本文档将对该的总体设计、硬件组成、软件编程等方面进行详细介绍。
2.总体设计2.1 目标在本章节中,我们将确定多功能履带式的设计目标,包括但不限于的尺寸、负载能力、移动速度和操作简便性等方面。
2.2 结构设计该采用履带式结构,以实现在各种地形条件下的稳定移动。
细化设计包括底盘结构、履带布置、履带轨道、驱动系统等。
2.3 控制系统设计该配备先进的控制系统,以实现自主化操作。
控制系统设计包括传感器选择、数据处理、路径规划与导航、-人机界面等方面。
3.硬件组成3.1 机械结构该的机械结构由底盘、上层结构、驱动系统和传感器等组成。
详细介绍机械结构的设计、材料选择和制造工艺。
3.2 电子系统该的电子系统包括控制器、传感器、电源、通信模块等。
细化介绍每个组成部分的功能和选型。
4.软件编程4.1 控制算法多功能履带式的控制算法包括路径规划、导航、障碍物避免和动态平衡控制等。
详细介绍每个控制算法的原理和实现方式。
4.2 编程框架本章节介绍软件编程框架的设计,包括任务分配、数据通信、多线程编程等方面。
5.附件本文档涉及的附件包括的结构图纸、电路图纸、软件代码等。
附件可随文档一起发送。
6.法律名词及注释6.1 法律名词在本文档中涉及的法律名词有:知识产权法、专利法、著作权法等。
这些法律名词的具体定义和解释,请参考相关法律法规。
6.2 注释在本文档中,一些专业术语或简写词汇可能会有特定的注释说明,以帮助读者更好地理解文档内容。
Sperian Pathfinder 辅助救援设备说明书

> > >RESPIRATORY PROTECTIONSPERIAN PATHFINDER™The Best Tool for a Worst-Case ScenarioThe Sperian Pathfinder firefighter locating system, with PULSE ®ultrasound technology, marks a new era in rapid intervention techniques.Its goal is simple — to reduce the time it takes a rescue team to reach a firefighter in trouble.Even in the most stressful situations, reliability and simplicity are evident in the Sperian Pathfinder’s three components.Beacons on the front and back IntelliPASS ™modules of Sperian SCBAs become active once the PASS has been activated, whether manually or auto m atically.Auxiliary and exit beacons ,left like breadcrumbs by the in-bound rescue team,mark the path to a safe exit.The Tracker,™a handheld device, detects the ultrasonic frequenciesofthePASSbeacons,the auxiliary beacons,and the exit beacons and clearly indicates the path rescuers should take for both rescue and exit.PULSE— short forPersonnel Ultrasonic Locating Safety Equipment — is what makes the Sperian Pathfinder so effective and reliable. Like sonar, ultrasound is unique in its ability to map out the shortest, most direct path to a firefighter or an exit.On the front and back of the Warrior ®and SurvivairPanther ®SCBAs, Sperian Pathfinder beacons are installed and transmit high-frequency sound waves — waves that are reflected by walls.They travel, like smoke does,through openings — hallways,windows, doors — for a way out of a structure. The Tracker senses these crucial ultra -sound signals and leads a RIT team toward the activated beacons, using visual and audible indicators.Why Ultrasound is SuperiorSperian Pathfinder ™— A Fast Approach to Team Member LocationActivating the Sperian Pathfinder is SimpleThere are no complex sequences to remember, just two easy ways to activate the Sperian Pathfinder:The firefighter presses the manual activation button on the IntelliPASS unit, or…The PASS goes into alarm without any movement from the downed firefighter.Once activated, the Sperian Pathfinder beacons on the front and back of the SCBA are activated and emit the ultrasound signals.• Ultrasound signals reflect and bounce off walls and travel through openings and cracks in windows, doorjambs and hallways, the same way smoke travels through an opening. When firefighters are led to a wall, aiming the Tracker to the right or left tells them which path to take,based on the signal strength of the ultra s ound signal emitted from Sperian Pathfinder beacons on the IntelliPASS.• Radio frequency, on the other hand, travels through solid objects and lacks sophisticated accuracy. Firefighters could be led to a wall,with a fallen team member on the other side,but the radio frequency signal is indicating to the user to go through the wall to locate their missing team member, without revealing how to do so.123Signals Can Be Seen and HeardThe Sperian Pathfinder takes no chances when it comes to leading rescue teams to their missing team members. The Tracker uses two indicators:•The visual alarm is a vertical column of LEDs which light up incrementally as the signal strength increases. Should the team turn the wrong way, the LEDs decrease accordingly,indicating to change direction.•The audible alarm increases and decreases in volume just as with the visual alarms.12The advantage of ultrasoundtechnology over radio frequency (RF) is clear.SRP.105 2/09Sperian Respiratory Protection USA, LLC | 3001 South Susan Street, Santa Ana, CA 92704 | Beacon Specifications Type 360° omni-directional ultrasound transmitter Weight 9.68 oz. (includes front-mounted beacon, back-mounted beacon, and DoublePASS module)Frequency Approximately 40 KHz Battery 9-volt alkalineBattery Life100+ hours in sensing mode; minimum of 1 hour in transmission modeTracker Specifications Type 15° directional ultrasound receiver Size 9" x 5" x 3.5"Weight 14.5 oz. with batteries Material Ultem ®thermoplastic Displays High-intensity LEDs Batteries Four AA alkalineBattery Life 16–25 hours, depending on number of lighted LEDs Sperian Pathfinder System SpecificationsRange Approximately 100-120 ft. line-of-sight; range will vary and may be reduced by obstructionsPatentU.S. 6,504,794 issued January 7, 2003; other patents pendingPart Number Description976050Sperian Pathfinder upgrade kit with DoublePASS for Warrior SCBA 961999Tracker kit 963000Exit beacon 963001Auxiliary beaconPart numbers for the Sperian Pathfinder installed in a configured Warrior SCBA depends on the pressure and low air alarm chosen.Contact your local Sperian distributor for further information.LWARNING!This document provides only an overview of the respiratory products shown. It does not provide important product warnings and instructions. Sperian Respiratory Protection recommends all users of respiratory equipment undergo thorough training and that all warnings and instructions provided with the products be thoroughly read and understood prior to use.Failure to read and follow all product warnings and instructions may result in serious personal injury, illness or death.Gear Keeper ®to keepattached to SCBA backpackLED bar graph for signal Audible annunciatorDirectional ultrasound receiver Mode switch and LEDs Mute switchLED bar graph for batterySperian Pathfinder• Time-saving technology helps you get to missing team members fast • Lightweight and easy to use • Exit and auxiliary beacons act as “bread crumbs,” safely leading you out the way you came in • Action ready and field-tested• Seamless upgrade to the Warrior ®SCBATracker ™is a trademark and PULSE ®is a registered trademark of Summit Safety of Devens, MA.Gear Keeper ®is a registered trademark of Hammerhead Industries of Ventura, CA. Ultem ®is a registered trademark of GE Plastics of Pittsfield, MA.。
六轮式多功能智能抢险机器人的设计
六轮式多功能智能抢险机器人的设计随着现代科技的发展,抢险救灾工作得到了越来越多的关注。
在一些紧急的情况下,人们往往需要进行抢险救灾工作,但由于现场环境复杂、危险性高以及人力不足等问题,所以需要一些智能化的机器人来进行抢险救灾工作。
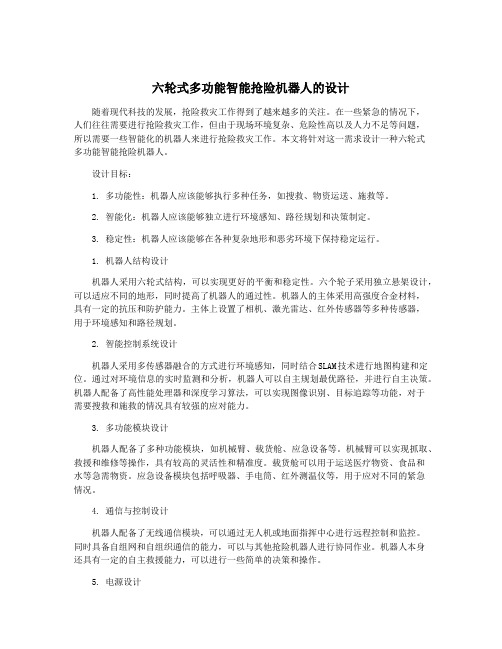
本文将针对这一需求设计一种六轮式多功能智能抢险机器人。
设计目标:1. 多功能性:机器人应该能够执行多种任务,如搜救、物资运送、施救等。
2. 智能化:机器人应该能够独立进行环境感知、路径规划和决策制定。
3. 稳定性:机器人应该能够在各种复杂地形和恶劣环境下保持稳定运行。
1. 机器人结构设计机器人采用六轮式结构,可以实现更好的平衡和稳定性。
六个轮子采用独立悬架设计,可以适应不同的地形,同时提高了机器人的通过性。
机器人的主体采用高强度合金材料,具有一定的抗压和防护能力。
主体上设置了相机、激光雷达、红外传感器等多种传感器,用于环境感知和路径规划。
2. 智能控制系统设计机器人采用多传感器融合的方式进行环境感知,同时结合SLAM技术进行地图构建和定位。
通过对环境信息的实时监测和分析,机器人可以自主规划最优路径,并进行自主决策。
机器人配备了高性能处理器和深度学习算法,可以实现图像识别、目标追踪等功能,对于需要搜救和施救的情况具有较强的应对能力。
3. 多功能模块设计机器人配备了多种功能模块,如机械臂、载货舱、应急设备等。
机械臂可以实现抓取、救援和维修等操作,具有较高的灵活性和精准度。
载货舱可以用于运送医疗物资、食品和水等急需物资。
应急设备模块包括呼吸器、手电筒、红外测温仪等,用于应对不同的紧急情况。
4. 通信与控制设计机器人配备了无线通信模块,可以通过无人机或地面指挥中心进行远程控制和监控。
同时具备自组网和自组织通信的能力,可以与其他抢险机器人进行协同作业。
机器人本身还具有一定的自主救援能力,可以进行一些简单的决策和操作。
5. 电源设计机器人采用可充电式锂电池供电,具有较长的续航能力。
六轮式多功能智能抢险机器人的设计
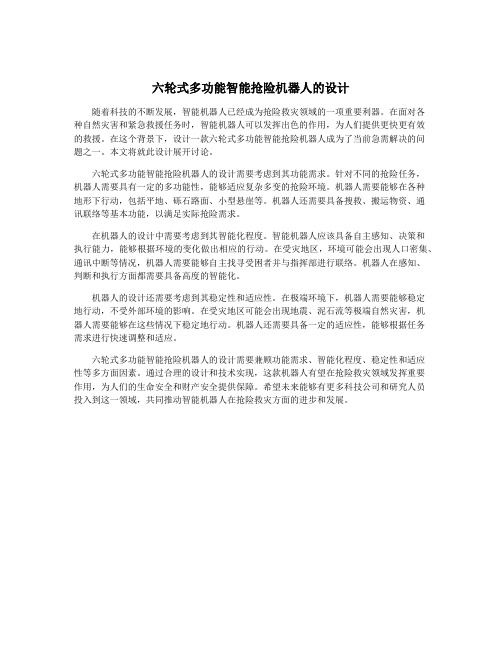
六轮式多功能智能抢险机器人的设计随着科技的不断发展,智能机器人已经成为抢险救灾领域的一项重要利器。
在面对各种自然灾害和紧急救援任务时,智能机器人可以发挥出色的作用,为人们提供更快更有效的救援。
在这个背景下,设计一款六轮式多功能智能抢险机器人成为了当前急需解决的问题之一。
本文将就此设计展开讨论。
六轮式多功能智能抢险机器人的设计需要考虑到其功能需求。
针对不同的抢险任务,机器人需要具有一定的多功能性,能够适应复杂多变的抢险环境。
机器人需要能够在各种地形下行动,包括平地、砾石路面、小型悬崖等。
机器人还需要具备搜救、搬运物资、通讯联络等基本功能,以满足实际抢险需求。
在机器人的设计中需要考虑到其智能化程度。
智能机器人应该具备自主感知、决策和执行能力,能够根据环境的变化做出相应的行动。
在受灾地区,环境可能会出现人口密集、通讯中断等情况,机器人需要能够自主找寻受困者并与指挥部进行联络。
机器人在感知、判断和执行方面都需要具备高度的智能化。
机器人的设计还需要考虑到其稳定性和适应性。
在极端环境下,机器人需要能够稳定地行动,不受外部环境的影响。
在受灾地区可能会出现地震、泥石流等极端自然灾害,机器人需要能够在这些情况下稳定地行动。
机器人还需要具备一定的适应性,能够根据任务需求进行快速调整和适应。
六轮式多功能智能抢险机器人的设计需要兼顾功能需求、智能化程度、稳定性和适应性等多方面因素。
通过合理的设计和技术实现,这款机器人有望在抢险救灾领域发挥重要作用,为人们的生命安全和财产安全提供保障。
希望未来能够有更多科技公司和研究人员投入到这一领域,共同推动智能机器人在抢险救灾方面的进步和发展。
地震救援机器人设计说明书资料

地震救援机器人设计说明书参赛单位:华北科技学院作者:孙浩然梁陈赞冯忠豪刘俊指导教师: 田忠友王海鹏目录一.作品简介 (1)二.主要功能指标 (2)三.工作原理 (4)四.运动分析 (5)4.1腿部移动过程 (5)4.2主题迁移过程 (6)五.动力分析 (8)5.1 单独由电机提供动力 (8)5.2 由气缸和电机共同提供动力 (9)六.实用化的可能 (11)七.市场前景 (13)八.作品外形照片 (14)九.参考文献 (16)一.作品简介该作品是基于地震救灾为背景而设计研发的,是一种能够起清障作用、标记事故地点、探索救援道路的先进设备。
该作品具有灵活、操作简便、适用性强、拓展功能多的特点,非常适用于救灾抢险工作。
高度智能化和自动化是本作品的又一大特点,也是具备强势竞争力的一大优势。
同时,采用了先进的控制系统和算法,是系统的通用性和适用性进一步增强,能够出色完成各项任务。
本作品由中心搭载平台,四条安装在平台四角的机械腿,中部的两部液压支架以及构建在平台上的挖掘装置组成。
机械腿由关节电机带动实现腿部移动,由安装其上的蜗杆装置实现腿部伸缩,四条腿依次移动后再次转动电机实现机械本体的整体前进。
达到预定位置后平台上的气泵开始工作,带动整个装置的升降掘进,起到了除障清路的作用。
同时腿部结构设计比较先进,使机械体具有一定的越障能力,摆脱了传统救灾设备行动能力不足的缺陷,对灾区环境有很强的适应能力。
双模的行进机构使得系统灵活性和机动力极大增强。
轮式行进可使机器人快速机动,灵活部署;机械腿行进可使机器人工作平稳,深入灾区。
采用双模互换的行进方式既能节省宝贵时间,又能提高工作效率,同时兼具节能的特点。
二.主要功能指标该机器人是着眼于地震灾区的各类救援任务而开发的,其独树一帜的外形设计和结构设计使其能够遂行地震灾区的各种搜救、援助、运输、支承等任务。
首先,通过加装红外感应器材和探人雷达等仪器设备,使其能够在较大范围内执行地震灾区的搜救任务,机器人的中心搭载平台采用模块化设计,可以根据实际需要即时更换设备进行搜救工作。
r1水上救援机器人说明书

r1水上救援机器人说明书一、引言随着水上救援的需求不断增加,传统的救援方式已经无法满足迅速、高效的救援要求。
为了提高救援行动的效率和安全性,我们设计了一款名为r1的水上救援机器人。
本说明书将详细介绍r1机器人的功能特点、使用方法和注意事项。
二、r1机器人的功能特点2.1 抗风浪能力强•采用先进的液压控制系统,能够稳定在风浪较大的水面工作。
•设有自动调节平衡系统,使得机器人在不平稳的水面上保持平衡。
2.2 快速响应能力•配备了强大的动力系统,可迅速前往事故现场,并迅速启动救援行动。
•机器人配备GPS导航系统,能够在最短时间内找到事故发生地点。
2.3 多功能救援系统•前装有机械手臂,可实现抓取、拖拽等操作,帮助落水者上岸或辅助其他救援任务。
•机器人配备了红外线热成像仪、可见光摄像机和声纳等多种传感器,能够在黑暗、浑浊的水面进行搜索和救援工作。
2.4 远程操作与自主导航•支持遥控器操控,能够通过遥控器对机器人进行远程操控和指挥。
•内置智能识别系统,能够自主判断救援任务优先级,根据具体情况进行决策和行动。
三、使用方法3.1 准备工作1.检查机器人的电量是否充足,保证机器人能够正常运行。
2.安装并连接遥控器与机器人,确保遥控器与机器人的信号稳定。
3.2 救援操作1.启动机器人,确保各个系统正常运行。
2.通过遥控器操控机器人的移动和操作。
3.当发生水上事故时,迅速将机器人送至事故现场。
4.利用机械手臂可进行抓取、拖拽等操作,将落水者或其他救援物品送至安全地带。
5.根据实际情况选择使用红外线热成像仪、可见光摄像机和声纳等传感器进行搜索和救援工作。
6.在救援行动结束后,及时对机器人进行清洁和维护,以保证下一次救援行动的顺利进行。
四、注意事项4.1 安全注意事项•在操作机器人时,请确保操作人员具备必要的水上救援知识和技能。
•请勿将机器人用于非法用途或危险区域。
4.2 维护与保养•请定期对机器人进行检查和维护,确保各个部件的正常运行。
六轮式多功能智能抢险机器人的设计
六轮式多功能智能抢险机器人的设计随着科技的不断进步,机器人技术也随之发展。
在现代社会需要高效率、高精度、高可靠性的机器人来完成多样化的任务。
本文提出的六轮式多功能智能抢险机器人,可以有效应对突发事件,提高抢险效率和精度,降低人员伤亡风险。
一、设计思路1.多轮机器人设计的优势传统的机器人设计通常采用的轮式或者腿式结构,轮式机器人比腿式机器人有更好的运动控制和控制稳定性,更容易实现复杂的机械设计。
本文设计的六轮式机器人具有搭载亿万计算机视觉算法的能力,能够更加精细地感知环境,实现自主导航、避障等功能。
2.集成式设计的优点机器人的多功能性对于机器人设计是极其重要的。
传统的机器人系统通常是将一些不同的任务和功能独立式设计成不同的机器人系统。
而六轮式多功能智能抢险机器人采取了集成式设计,将多种功能和任务融合在一起,取得了很好的效果。
3.智能化控制的优势传统机器人通常是由人工积累的常识和规则构成的控制系统来实现自主控制,但是这种方式难以应对复杂多变的场景。
智能化控制系统可以让机器人通过学习和优化算法自主学习,不断优化性能,增强机器人的控制能力。
二、机器人的机械设计六轮式机器人主要由6个轮子构成,每个轮子由一直轮轴和一个驱动马达构成。
每个轮子都与机箱底部保持适当的间隙,只有当机器人运动时,轮子才会触地滚动。
这种结构可以有效提高机器人对地面的适应性,保证机器人的稳定性和高效性。
2.机箱设计机箱采用玻璃钢材料制作,具有轻便、坚固、防水等特点,可在复杂环境下操作。
机箱底部配有六个轮子和六个独立驱动系统,控制机器人移动和转向。
3.运动控制系统机器人采用插入式的单片机控制器,它可以方便的控制机器人的行动,并且可以快速的重新编程以更好的适应变化的环境,另外机器人也配有高精度编码器、电机驱动电路等功能元器件,以保证机器人高效的运动和执行任务。
三、智能化控制系统1.机器人感知系统六轮式抢险机器人的主要感知系统有:机器人本身的姿态感知系统、摄像机感知系统、激光雷达扫描系统等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
辅助救援机器人设计说明书
单位:吉林大学机械科学与工程学院
创作成员:郭亚辰何佳龙周文成马浚铭邱幸指导老师:曲兴田王幼林
二零一零年五月
目录
1.产品研发背景 (3)
2.产品结构及工作原理 (3)
3.技术参数计算 (9)
4.关键部位校核 (10)
5.产品创新点 (12)
6.产品改进方案 (13)
7.产品推广前景 (14)
8.参考文献 (14)
9.文档附录 (15)
1、产品研发背景
地震是众多自然灾害中危害较大的一种,不仅带来巨大的财产损失,更造成严重的人员伤亡。
而地震因其本身的突发性等特征难以被预测,因此加强灾后救援力度就显得尤为重要了。
地震后的救援工作主要分为两步,首先是对受困人员生命体征的探测,使用生命探测仪、热红外生命探测仪、“蛇眼”、声波振动生命探测仪、搜救犬、救援机器人等,探测到被困人员的位置后,第二步便是及时展开救援工作了。
现有的救援机械多为重型机械,不适合复杂路况的行驶,而且在短时间内难以运送至受灾地点,因此在救援过程中常常需要使用一些小型的辅助救援工具。
目前我国使用的该类工具主要包括千斤顶、小气垫等,其作用是在发现受困人员时将压在其身上的楼板支起。
事实证明千斤顶、小气垫的承重能力较强,但自动化程度相对较低,需要靠救援人员深入废墟中心将其放置在相应的位置。
在放置过程中,由于救援人员的自重较大(按75Kg计算),很容易造成废墟的二次坍塌。
为了有效地解决这一问题,我们设计制作了该辅助救援机器人,它具有自重小、成本低,便于救援人员携带等特点。
本设计将杆式起重机构与行走机械加以组合,并利用机电一体化的原理进行统一控制,提高了原有起重机械的自动化程度,有效地避免了二次坍塌的发生。
2、产品结构及工作原理
图2.1所示为产品的三维结构
图2.1 产品三维结构简图
2.1行走部分
一般救援机械的行走机构分为轮式和履带式两种。
轮式行走机构的特点在于行进速度
快,易于控制,但越障能力不强,且与地面接触面积小,产生较大的压强。
履带式行走机构则具有越障能力强的特点,因此被广泛应用于工作环境较复杂的行走机械中,如近年来国内外研制的履带式越障机器人等,在军工等领域也得到了越来越广泛的应用。
鉴于震后地面环境复杂,本产品行走部分采用履带式行走机构。
行走部分采用两个独立电机分别驱动,电机的正反转可通过控制电路进行控制,根据电机转向的不同产生速差,从而实现机器人的转向。
控制电路的工作原理将在后文中作详细介绍。
2.2 工作部分
该产品的工作部分为一杆式起重机构,图2.2所示为其三维简图
图2.2 连杆式起重机构三维简图
当机器人运行至相应位置时,履带电机停转。
通过遥控控制丝杠电机旋转,带动螺母做直线运动,螺母运动的同时杆式起重机构双向升起。
下端运行至与地面接触起支撑作用,将底盘及履带撑离地面。
上端运行至与楼板接触,依靠丝杠螺母的自锁性固定并将楼板撑住。
由于该连杆式起重机构对称性较好,且行走部分采用了履带式行走机构,该机器人在
短连杆 销轴
长连杆
螺母
行进或工作过程中若由于路况等原因发生翻转,仍能正常工作。
图2.3所示为该起重机构的机构简图。
图2.3 连杆式起重机构的机构简图
其自由度P=1,以螺母为原动件,从而实现准确的运动。
2.3 控制部分
由于救援过程中条件所限,需采用无线遥感设备,该部分完成的功能包括控制轮子电机正反转从而更好地实现转弯功能、控制工作部分电机的启停等。
电路部分完全由设计者自行设计,设计部分如下:
2.3.1 与非门电路
74LS08*2 与门74LS04*1 非门
74LS32*2 或门74LS148*1
74LS11*4 与门
图2.4 与非门电路
图2.4所示为机器人所需的与非门电路,分别可以根据需要输出不同的电信号从而完
成对机械的控制。
2.3.2 电路设计原理图
总电路接12V电源,为遥控控制电路、电机正反转
控制电路、支撑机构保护电路供电
电路设有急停开关8SB,用于在工作异常时及时断
开电路
遥控控制电路负责远程控制履带电机的正反
转及支撑机构的保护电路,其原理为:
1、开关1SB、2SB、5SB、6SB负责控制继
电器KM7、KM8、KM11、KM12的通断,
进而控制电机正反转电路中其相应的常
开触点的通断,实现电机的正反转控制。
2、开关3SB、4SB负责控制继电器KM
3、
KM4的通断,进而控制支撑机构保护电
路中相应的常开触点的通断。
2.3.3履带的正反转控制电路
图2.5 履带正反转控制电路
图2.5所示电路由电源、电机以及四个三极管构成,通过与非门电路转换输出信号,使不同的三极管导通,从而控制电机的正反转。
由于履带由两独立电机分别驱动,因此可通过调节两电机的正反转方向使机器人转弯。
2.3.4 焊接电路板
图2.5 焊接电路板
图2.5为最终焊接完成的电路板,外接电源为12V 直流电,通过电压转换器件将其转化为直流5V 稳定输出。
通过遥控器控制74LS148的输出信号,低电平有效。
信号经74LS11、74LS04、74LS08、74LS32进行逻辑运算,运算结果经三极管放大,分别控制三个电机的正反转。
实现履带及丝杠电机的启停与转向。
3、技术参数计算
3.1 履带电机功率计算
设定整车质量m ’=20Kg
确定k m =1.2, 设计质量m= k m *m ’=1.2*20=24Kg 由于产品工作路况较复杂,选取摩擦系数f=0.5 则整车前进所需总动力 F=m*g*f=24*9.8*0.5=117.6N
履带为齿形带,与之啮合的齿轮半径为R=65mm 其所需扭矩为T=F*R=223.44*0.065=14.5236N*m
为保证行驶平稳,行驶速度设为2m/min 计算得电机输出转速为5r/min ,使用电源为12V 直流电源。
由于采用两电机驱动,每个电机输出扭矩为7.2618N*m 由T=9.55*
n
p
=7.2618N*m ,解得p=3.8W 由机械工程手册得k=1.3,传动效率h 1=0.95,轴承效率 h 2=0.9,得h =0.83 因此电机输出功率为
p
=4.58W 所选电机为12V 直流电机,功率为10W ,所带变速箱速比为1:810,转速为5r/min
4、关键部位校核
经分析,连杆式起重机构为主要承力部件,因此需对其强度进行校核。
1) 图4.1所示结构中销轴处为结构的危险截面。
杆1
杆3
杆2
销轴
图4.1 连杆式起重机构
图4.2所示为销轴的受力简图,此处忽略杆的自重,认
为所有杆均为二力杆,受力均沿各杆自身方向。
销轴轴向尺寸
为75mm,径向尺寸为∅18mm下面校核顶角为120度时的应力
状态。
设F1=4000N,由受力平衡条件可知:
图4.2 销轴受力简图F1=F2*sin30°+F3*sin30°+F4*sin30°
F2*cos30°=F3*cos30°+F4*cos30°
F3=F4。