鱼眼镜头理论
鱼眼镜的技巧
鱼眼镜的技巧
1. 尽量保持镜头垂直
使用鱼眼镜拍摄时,应尽量保持镜头垂直以防止出现扭曲的图像。
如果垂直度不够,可以使用数码尺或水平仪来辅助。
2. 制造视觉冲击
鱼眼镜的镜头广角极大,可以将视野扩大至180度。
拍摄时可以选择适当的角度和构图来制造视觉冲击效果。
3. 手持稳定
由于广角镜头的镜头重心向外,拍摄时需手持稳定以防止模糊或摇晃影响图象质量。
4. 强调近距离
鱼眼镜头适合拍摄近距离的物品和场景。
在拍摄时,可以选择突出近距离部分的构图,增强拍摄效果。
5. 利用弯曲线条
鱼眼镜头的特性是弯曲线条,可以利用这个特点着重突出画面的层次感和立体感,拍摄时可以选择一些具有凹凸不平的建筑、树木等作为构图元素。
6. 黑白拍摄
黑白摄影可以增强画面的对比度,突出鱼眼镜头的特点。
因此,使用鱼眼镜头拍摄黑白照片可以有更好的效果。
鱼眼原理的应用

鱼眼原理的应用1. 什么是鱼眼原理鱼眼原理是一种光学成像技术,通过特殊设计的鱼眼镜头,可以实现对广角景物的全景拍摄。
鱼眼镜头的设计原理是利用透镜的特殊形状和光线折射的原理,将景物的影像投射到图像传感器上,从而实现广角的视野。
常见的鱼眼镜头有圆视角鱼眼镜头和全景鱼眼镜头两种类型。
2. 鱼眼原理的应用领域2.1 摄影和摄像鱼眼镜头在摄影和摄像领域中有广泛应用。
它可以拍摄出非常夸张的广角效果,能够将整个场景的细节都收入镜头,给人一种立体、丰富的视觉体验。
鱼眼镜头广泛应用于风景摄影、建筑摄影、运动摄影等领域,帮助摄影师捕捉到独特而精彩的画面。
2.2 安防监控鱼眼镜头在安防监控领域也有重要应用。
由于鱼眼镜头具备广角的视野,可以覆盖更大的监控范围。
摄像机配备鱼眼镜头后,可以实现全景监控,减少死角,提升监控效果。
此外,鱼眼镜头还具备畸变校正功能,可以对图像进行修正,使其更加真实、清晰。
2.3 车载系统在车载系统领域,鱼眼镜头也有应用。
车载监控系统通常需要实时获取车辆周围的情况,包括前方、后方和侧方的视野。
鱼眼镜头的广角特性可以提供更广阔的视野,帮助驾驶员全面掌握行车情况,增强行车安全性。
2.4 虚拟现实鱼眼镜头在虚拟现实领域也有应用。
虚拟现实设备通常使用鱼眼镜头来捕捉用户周围的环境,以实时渲染出逼真的虚拟场景。
鱼眼镜头的广角视野可以为用户提供更真实、更沉浸式的体验。
3. 鱼眼原理的优势和局限性3.1 优势•广角视野:鱼眼镜头具备广阔的视野,可以将更多细节纳入画面中。
•全景拍摄:鱼眼镜头可以实现全景拍摄,展现出更加真实的场景。
•畸变校正:鱼眼镜头可以对图像进行畸变校正,使其更加真实、清晰。
3.2 局限性•畸变问题:鱼眼镜头会产生明显的畸变,需要通过软件或硬件进行校正。
•图像失真:由于广角效果,拍摄出的图像可能会出现形变、拉长等失真问题。
•光线损失:由于广角视野,鱼眼镜头在边缘部分光线损失较大,在低光条件下可能影响图像质量。
器材知识鱼眼镜头

器材知识鱼眼镜头器材知识:鱼眼镜头鱼眼镜头有超宽的视角,所拍摄照片有明显的桶形畸变,近大远小的透视效果非常强烈,产生很强的视觉冲击力。
人眼的结构鱼眼的结构鱼眼镜头是一种超广角的特殊镜头,其视觉效果类似于鱼眼观察水面上的景物,我们知道鱼的眼睛其实同人眼构造类似,但是人眼的水晶体是扁圆形的,因此可以看到更远处的东西,而鱼的眼睛水晶体是圆球形,因此虽然只能看到比较近的物体,却拥有更大的视角,也就是看得更加广阔,直说一鱼眼的水晶体弧度会如此高,主要就是为了应对水中光线的折射率问题,我们看杯子中的筷子会觉得筷子变弯了,这就是典型的折射。
以上就是典型的水在光线中的折射关系,根据光路可逆的规律,也就是说,如果在水中看空气中的东西的话,同样会有折射现象存在,而鱼眼镜头的原理就是根据这个获得的,如果说鱼眼在水中的视角是150度,那么其到空气中的视角可能就要达到180度。
而鱼眼镜头的思路就是来自于这种特点,当然其实同鱼眼观察水面以外物体的关系真的不大,只是体现的效果比较类似,毕竟这里不存在水的折射率,只是镜头设计者研究了鱼眼的结构,才搞出了有意思的鱼眼镜头。
尼康8mm f/2.8圆形鱼眼镜头拍摄样片鱼眼镜头的设计中心思想就是,拥有更大的球面弧度(类似鱼眼的球形水晶体),成像平面离透镜更近(鱼眼的水晶体到视网膜距离很近)。
鱼眼镜头视角可以接近或者超过180度,对于135画幅的相机来说,鱼眼镜头的焦段多在6-16mm之间,视角一般都在170度左右,由于视角超大,因此其桶形弯曲畸变非常大,因此画面周边的直线都会被弯曲,只有镜头中心部分的直线可以保持原来的状态。
180度鱼眼 150度鱼眼 120度鱼眼 90度鱼眼鱼眼镜头无论如何它的边缘线条都是要弯曲的,即使90度的鱼眼也是这样,这种畸变我们在很多广角镜头上都可以看到,而这就是明显的桶形畸变。
同样的120度的鱼眼看起来弯曲的更加厉害一些了,而且被容纳进范围的景物更多;150度同样如此,而180度的鱼眼则可以把镜头周围180度范围内的所有物体都拍摄进去。
利用镜头特性拍摄出独特的鱼眼照片
利用镜头特性拍摄出独特的鱼眼照片鱼眼照片以其独特的畸变效果和广角视野广受欢迎。
利用鱼眼镜头的特性,可以拍摄出视觉上引人入胜的照片。
本文将介绍如何利用镜头特性拍摄出独特的鱼眼照片。
一、选择适当的鱼眼镜头选择适当的鱼眼镜头是拍摄鱼眼照片的关键。
鱼眼镜头通常有两种类型:全画幅鱼眼镜头和APS-C画幅鱼眼镜头。
全画幅鱼眼镜头的视角超过180度,畸变效果更加显著,而APS-C画幅鱼眼镜头的视角略小。
二、掌握正确的拍摄技巧1. 选择合适的拍摄主题:鱼眼照片适合拍摄具有层次感和空间感的场景,如建筑物、景观、人物等。
选择适合的主题能够突出鱼眼镜头的特点。
2. 确保足够的光线:由于鱼眼镜头的广角视野,需要更多的光线才能拍摄出清晰明亮的照片。
因此,在拍摄时确保充足的光线,可以选择在白天拍摄或者使用合适的闪光灯。
3. 控制畸变效果:鱼眼镜头的特点之一是畸变效果,这是其与其他镜头的显著区别。
在拍摄时,可以根据需要选择不同的畸变效果,通过调整拍摄角度和距离来控制畸变的强度和范围。
4. 利用环境线条:鱼眼镜头可以很好地捕捉环境中的线条和形状。
在拍摄时,可以寻找具有弯曲或者对称性的线条,通过鱼眼镜头的广角视野将其呈现出来,增加照片的艺术感。
5. 运用对比元素:在鱼眼照片中,利用对比元素可以增强照片的表现力。
可以选择不同颜色、形状或者大小的元素,将其放置在画面中心或者角落,增加照片的层次感和视觉冲击力。
三、后期处理与优化1. 进行适度的修剪:鱼眼照片可能会因为广角视野的缘故出现一些不需要的元素,如自己的手指或者其他无关的东西。
在后期处理时,可以适度地修剪照片,删去这些干扰因素,突出照片的主题。
2. 调整色彩和对比度:通过调整色彩和对比度可以增强鱼眼照片的表现力。
可以在后期处理软件中调整色彩饱和度、亮度和对比度,使照片更加鲜明生动。
3. 添加特殊效果:在后期处理时,还可以尝试添加一些特殊效果,如模糊、滤镜或者纹理等,以增加照片的艺术感。
鱼眼镜头的原理

鱼眼镜头的原理
鱼眼镜头是一种特殊的广角镜头,其原理是利用球面透镜将周围的视野投影到相机的感光面上。
与常规的透镜不同,鱼眼镜头的球面透镜具有非常短的焦距和特别大的视角。
鱼眼镜头的球面透镜可以通过两种方式来投影图像:一种是全球投影(全景投影),另一种是圆像投影(圆投影)。
在全球投影中,球面透镜将三维空间中的光线聚焦到一个平面上,得到一个“鱼眼”状的图像。
这种投影方式可以实现非常宽广的视角,捕捉到更多的景象,但同时也会导致图像的畸变,使得图像边缘变形,并且中心区域的细节被拉伸。
而在圆像投影中,球面透镜将光线投影到一个圆内,保持了图像的圆形特征。
这种投影方式可以有效降低畸变,同时也能够实现较宽广的视角。
但由于圆像投影保留了环状的图像,因此在实际应用中需要进行图像的裁剪或变换,以适应不同的显示设备或需求。
除了广角视野外,鱼眼镜头还具有较大的景深,即前景和后景都能够保持相对清晰。
这是由于鱼眼镜头的短焦距和球面透镜的特性所决定的。
因此,鱼眼镜头常被用于拍摄需要强调环境氛围和创造独特视觉效果的场景,如狭小空间、建筑物内部或特写等。
值得注意的是,由于鱼眼镜头的特殊投影方式,使用者在拍摄过程中需要注意避免将自己或其他不希望出现在画面中的元素
暴露在图像的边缘。
此外,也需要注意光线的控制,避免在逆光或强光下拍摄时产生过曝或阴影等问题。
总的来说,鱼眼镜头通过利用球面透镜将周围的景物投影在感光面上,实现了广角的视野和独特的视觉效果。
其特殊的投影方式赋予了它独特的拍摄魅力,成为摄影爱好者和专业摄影师常用的创意工具。
鱼眼相机成像原理
鱼眼相机成像原理
鱼眼相机是一种广角镜头,其成像原理可以简单概括为以下几个关键步骤:
1. 光线经过鱼眼镜头表面的球面透镜,被折射和散射。
2. 光线在球面透镜内部被聚焦到一个或多个焦点上,形成一个球面形状的图像。
3. 图像在鱼眼镜头的镜片上形成弯曲的圆形或半球形。
4. 摄像机的感光元件,如CCD或CMOS,将图像的光照模式转换为电信号。
5. 电信号经过处理和放大后,可以通过电缆或无线传输到显示屏上显示图像。
总之,鱼眼相机通过球面透镜将光线聚焦到球面上,然后将图像转换为电信号,最终呈现出广角和弯曲的图像效果。
鱼眼镜头详细介绍及拍摄技法

鱼眼镜头详细介绍及拍摄技法“鱼眼镜头”是一种俗称,以135mm单反相机镜头为例,鱼眼镜头是一种焦距在16mm以内、并且视角在180°左右的短焦距超广角摄影镜头,为了让镜头达到最大的摄影视角,这种摄影镜头的前镜片直径很短且呈抛物状向镜头前部凸出,因为和鱼的眼睛很相似,因此才有了鱼眼镜头的说法。
下面,小编将给大家全方位详细的介绍一下鱼眼镜头,以及使用鱼眼镜头的拍摄技巧。
佳能EF 8-15mm f/4L USM 鱼眼一、鱼眼镜头的视觉效果鱼眼镜头的焦距范围一般为6~16mm。
其特点是视角很大,多在180°以上,有些甚至达到230°,而且桶形弯曲畸变很大,画面边缘的直线都被弯曲,只有通过中心部分的直线能够保持原来的直线状态。
二、鱼眼镜头又可以分成两种:全圆形和全幅面。
全圆形鱼眼镜头的视角达到180°以上,在画面上只看到圆形部分,这种镜头将画面的四角全遮挡住了,这类镜头的外形特征是镜头前端第一片透镜很大,向前明显凸出来,但是对于最大光圈稍微小些的鱼眼镜头,镜头前端就没有那么夸张了。
代表镜头:适马8mm f/3.5 EX DG Circular Fisheye 圆型鱼眼全圆形鱼眼镜头拍摄效果当你把全圆形鱼眼镜头举到齐眼的高度并向正前方拍摄时,这只镜头会拍摄下你面前半球形空间内的一切,甚至包括你自己的鞋子。
这种影像通常会在画幅内形成一个圆形,而并不是充满矩形画幅。
显然,鱼眼镜头是一种特殊效果镜头,其失真极大,透视线条沿各个方向从中心向外辐射,画面内除通过中心的直线仍保持平直外,其他部分的直线部变弯曲。
全幅面鱼眼镜头也叫“对角线鱼眼镜头”,其特点是整个画面并不出现遮角现象,是完整的24×36mm画幅,但画面的几何图形仍具有集中于画面中部的鱼眼视觉效果。
代表镜头:尼康AF Fisheye 16mm f/2.8D 鱼眼全幅面鱼眼镜头拍摄效果鱼眼镜头最大的作用是视角范围大,视角一般可达到220°或230° ,这为近距离拍摄大范围景物创造了条件;鱼眼镜头在接近被摄物拍摄时能造成非常强烈的透视效果,强调被摄物近大远小的对比,使所摄画面具有一种震撼人心的感染力;鱼眼镜头具有相当长的景深,有利于表现照片的长景深效果。
鱼眼相机测距算法
鱼眼相机测距算法
鱼眼相机测距算法是一种利用鱼眼镜头拍摄的图像来进行距离测量的技术。
由于鱼眼镜头具有较大的畸变,使得拍摄的图像呈现出明显的扭曲效果,这种扭曲程度与拍摄对象与相机之间的距离有关。
因此,通过分析鱼眼图像中的畸变程度,可以推算出拍摄对象与相机之间的距离。
在鱼眼相机测距算法中,首先需要对鱼眼图像进行畸变校正,将其转换为普通透视图像。
然后,通过提取图像中的特征点,并计算这些特征点在畸变图像和校正图像中的位置变化,可以推算出相机与拍摄对象之间的距离。
为了提高测距精度,可以采用多种优化策略。
例如,可以采用更精确的畸变模型来描述鱼眼镜头的畸变,从而提高校正精度;也可以采用更可靠的特征提取算法来提取图像中的特征点,从而提高测距精度。
总的来说,鱼眼相机测距算法是一种高效、可靠的测距技术,可以广泛应用于智能驾驶、机器人视觉、安防监控等领域。
随着技术的不断发展,鱼眼相机测距算法的性能将会不断提升,为各个领域的发展提供更加精确的测量手段。
鱼眼镜头的成像理论与优化设计(可编辑)
鱼眼镜头的成像理论与优化设计(可编辑)鱼眼镜头的成像理论与优化设计国防科学技术大学博士学位论文鱼眼镜头的成像理论与优化设计姓名:戴建宁申请学位级别:博士专业:光学工程指导教师:王永仲19990101国防科学技术大学研究生院学位论文摘要鱼眼镜头是一种具有大相对孔径、大视场角和较长的后工作距离的反摄远镜头,它的视场角可以达到甚至超过。
,因此它能够将半球空域甚至超半球空域的物体成象在有限的象平面上。
这种镜头在科研、军事等许多领域有着广泛的应用前景。
鱼眼镜头有不同于普通镜头的投影公式,以便能够对大视场角的物体成象。
选用这些公式实质上相当于人为地引入了负畸变,而负畸变的引入能够改善象面照度的均匀性。
鱼眼镜头具有很大的光阑球差和光阑彗差,可以运用光阑球差的级数展开式来确定实际的主光线位置,运用在孔径光阑上度量渐晕的方法来利用光阑彗差,增加轴外点进入镜头光束的宽度,以进一步改善象面照度的均匀性。
鱼眼镜头的优化涉及到非线性性、病态、光线溢出、光路追迹异常等问题的处理。
文章中采用了复合优化和最大因子技术来克服优化中的非线性性,利用释放象差的方法来克服优化中的病态,并且通过视场缩放和切换受控指标来克服光路追迹异常。
文章最后给出了镜头优化的几个实例。
关键词: 鱼眼镜头光路追迹光学设计优化成忽凹每里堕型堂垫查盔兰塑耋生堕兰垡笙苎,.】.“.....? ,,., / ..:国防科学技术大学研究生院学位论文绪论鱼眼镜头是一种特殊的光学镜头,其视场角接近、等于甚至大于。
,它能将半球空域甚至超半球空域的物体成象在象面的有限范围内。
这种镜头引入了很大的桶形畸变,由于这种畸变的引入,鱼眼镜头在理论、计算、设计上与一般的光学镜头有显著的不同。
鱼眼镜头具有很大的光阑球差和光阑彗差。
前者使得实际入瞳的位置与近轴光学定义的入瞳位置有明显差异,后者使得实际入瞳的大小也发生了变化。
入瞳大小的改变和桶形畸变的引入都将对轴外点象面光照度产生影响。
鱼眼镜头后光组初值设计

鱼眼镜头后光组初值设计鱼眼镜头是一种广角镜头,可以捕捉到人眼无法观测到的画面,广泛应用于摄影、监控、无人机等领域。
然而,由于其大幅度的视场角,鱼眼镜头容易出现后光问题,导致拍摄出来的图像有明显的光斑和亮度差异。
为解决这一问题,需要对鱼眼镜头后光组进行初值设计。
鱼眼镜头的后光组由若干透镜组成,其设计目的是在保持足够的光学性能的同时,尽可能减小后光问题。
对于初值设计,需要考虑以下因素:1. 相对主视场半径:鱼眼镜头的光学设计是以前主点为基础的,即通过空间变换将主点投射到图像平面。
因此,后光组的相对主视场半径是初值设计中的重要参数之一。
该值的大小与后光问题的严重程度相关,需要根据具体需求进行调整。
2. 透镜的形状和位置:后光组中每个透镜的形状和位置都会影响成像效果和后光问题。
一般情况下,为了减小后光,可以使用高质量的散光透镜,并控制其在光轴上的位置和倾斜角。
3. 透镜的材料和厚度:透镜的材料和厚度也会影响成像效果和后光问题。
例如,使用高折射率的材料可以有效减小透镜厚度,从而减小后光。
但是,此类材料的价格较高,需要权衡利弊。
4. 透镜的涂层:涂层的质量和种类影响着透镜的透过率和反射率。
为减小后光,需要采用具有高透过率的涂层,并注意避免反射光的影响。
初值设计完后,可以进行光学模拟和实际制作。
在实际制作中,还需要注意镜头系统的精度和稳定性,避免由于材质、工艺等原因导致的变形和非均匀性。
总的来说,鱼眼镜头后光组的初值设计涉及到多个方面的知识和技能。
需要充分考虑镜头的应用场景和具体需求,并在光学设计软件的帮助下,进行充分的仿真和优化。
只有通过科学合理的设计和制作,才能获得高质量的图像和满意的成像效果。
鱼眼去畸变原理

鱼眼去畸变原理鱼眼镜头是一种广角特殊镜头,通常呈现出圆形畸变的特点。
随着数码摄影的发展,人们对摄影画面的质量要求越来越高。
为了解决鱼眼镜头带来的畸变问题,科学家们不断研究和改进,从而衍生出了去畸变技术。
本文将介绍鱼眼去畸变原理,并探讨不同方法的应用。
一、鱼眼镜头畸变的原理鱼眼镜头之所以产生畸变,是因为光线在镜头中传播时发生了折射和反射。
这种畸变主要有两种类型:径向畸变和切向畸变。
1. 径向畸变径向畸变是指光线通过鱼眼镜头时,在距离图像中心越远的地方,图像的拉伸或收缩现象。
在鱼眼镜头的中心区域,图像拉伸较小;而在边缘区域,图像则显著地拉伸。
这导致了图像的非线性失真,使得直线在图像上呈现曲线的形状。
2. 切向畸变切向畸变是指光线通过鱼眼镜头时,由于镜片的不对称性导致图像产生弯曲或者扭曲。
这种畸变让图像的形状变得扭曲,不符合真实世界的几何形状。
二、鱼眼去畸变方法为了消除鱼眼镜头的畸变,科学家们提出了各种不同的去畸变方法。
下面将介绍几种常见的去畸变方法。
1. 数学模型法数学模型法是鱼眼去畸变的常见方法之一。
在这种方法中,科学家们通过对鱼眼镜头成像原理的深入研究,提出了数学模型来描述畸变的特性。
通过将原始图像映射到新的坐标系中,然后根据数学模型进行逆变换,可以实现对图像的去畸变。
这种方法可以根据镜头的畸变特点对图像进行精确的修正,使得图像在视觉上更加真实。
2. 空间转换法空间转换法是一种基于几何学原理的去畸变方法。
在这种方法中,科学家们通过对鱼眼图像进行空间变换,将弯曲或者扭曲的图像转换成直线和平面。
常用的空间转换方法包括球面投影、圆柱投影、透视投影等。
通过将鱼眼图像映射到一个新的坐标系中,然后对坐标进行逆变换,可以实现对图像的去畸变。
3. 实时校正法实时校正法是一种通过软件算法实时对鱼眼图像进行去畸变的方法。
在这种方法中,科学家们通过编写相应的算法,将鱼眼图像的特殊畸变进行实时校正。
这种方法通常用于摄像机等实时采集图像的设备上,具有实时性和灵活性的优势。
鱼眼去畸变原理

鱼眼去畸变原理
鱼眼镜头(Fisheye Lens)是一种广角镜头,其特点是拥有极大的视场角,能够捕捉到非常广阔的画面,但也伴随着一定的畸变。
畸变是指由于镜头形状或光学设计等原因引起的图像形变。
为了纠正鱼眼镜头的畸变,可以采用去畸变(De-fishing)技术。
去畸变的原理一般涉及到数学变换和图像处理,其中的主要步骤包括:
1.建立畸变模型:在去畸变的过程中,首先需要建立鱼眼镜头的畸变模型。
这个模型描述了畸变是如何发生的,通常使用数学公式或几何变换来表示。
2.提取畸变参数:通过对已知几何形状的对象进行拍摄,或者使用标定板进行标定,提取出畸变模型所需的参数。
这些参数通常包括径向畸变和切向畸变等。
3.数学变换:利用建立的畸变模型和提取的畸变参数,对图像进行数学变换。
这可能包括放射变换、透视变换等,以纠正由于畸变导致的图像形变。
4.插值处理:在进行数学变换时,通常需要进行像素值的插值计算,以确保图像的平滑性和连续性。
5.输出去畸变图像:经过数学变换和插值处理后,生成的图像即为去畸变后的图像,该图像更符合人眼正常看到的场景。
需要注意的是,去畸变技术虽然可以在一定程度上纠正畸变,但在这个过程中可能会引入一些局部的拉伸或挤压,具体效果也受到畸变模型的准确性和图像处理算法的影响。
在实际应用中,去畸变技术通常用于摄影、计算机视觉等领域,以改善鱼眼图像的观感和准确性。
鱼眼镜头的5个妙用
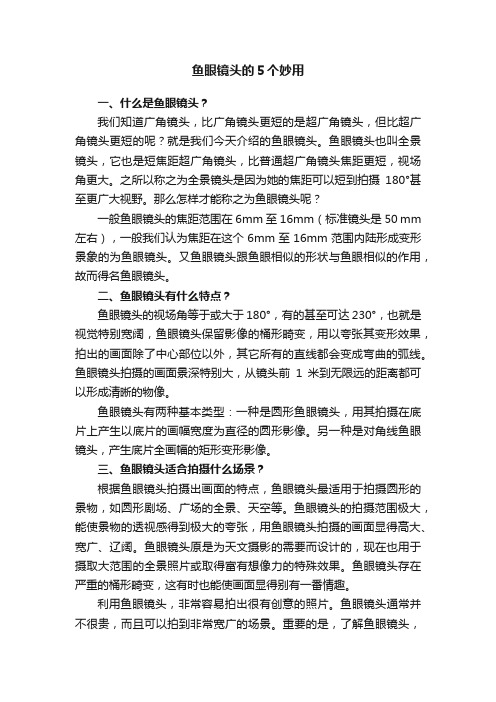
鱼眼镜头的5个妙用一、什么是鱼眼镜头?我们知道广角镜头,比广角镜头更短的是超广角镜头,但比超广角镜头更短的呢?就是我们今天介绍的鱼眼镜头。
鱼眼镜头也叫全景镜头,它也是短焦距超广角镜头,比普通超广角镜头焦距更短,视场角更大。
之所以称之为全景镜头是因为她的焦距可以短到拍摄180°甚至更广大视野。
那么怎样才能称之为鱼眼镜头呢?一般鱼眼镜头的焦距范围在6mm至16mm(标准镜头是50 mm 左右),一般我们认为焦距在这个6mm至16mm范围内陆形成变形景象的为鱼眼镜头。
又鱼眼镜头跟鱼眼相似的形状与鱼眼相似的作用,故而得名鱼眼镜头。
二、鱼眼镜头有什么特点?鱼眼镜头的视场角等于或大于180°,有的甚至可达230°,也就是视觉特别宽阔,鱼眼镜头保留影像的桶形畸变,用以夸张其变形效果,拍出的画面除了中心部位以外,其它所有的直线都会变成弯曲的弧线。
鱼眼镜头拍摄的画面景深特别大,从镜头前1米到无限远的距离都可以形成清晰的物像。
鱼眼镜头有两种基本类型:一种是圆形鱼眼镜头,用其拍摄在底片上产生以底片的画幅宽度为直径的圆形影像。
另一种是对角线鱼眼镜头,产生底片全画幅的矩形变形影像。
三、鱼眼镜头适合拍摄什么场景?根据鱼眼镜头拍摄出画面的特点,鱼眼镜头最适用于拍摄圆形的景物,如圆形剧场、广场的全景、天空等。
鱼眼镜头的拍摄范围极大,能使景物的透视感得到极大的夸张,用鱼眼镜头拍摄的画面显得高大、宽广、辽阔。
鱼眼镜头原是为天文摄影的需要而设计的,现在也用于摄取大范围的全景照片或取得富有想像力的特殊效果。
鱼眼镜头存在严重的桶形畸变,这有时也能使画面显得别有一番情趣。
利用鱼眼镜头,非常容易拍出很有创意的照片。
鱼眼镜头通常并不很贵,而且可以拍到非常宽广的场景。
重要的是,了解鱼眼镜头,知道如何使用它,知道它的利和弊。
鱼眼镜头最早应用于气象学,用来研究天空和云的组成。
这种镜头因为其独特的性能,很快就在普通摄影领域中流行起来。
鱼眼去畸变原理

鱼眼去畸变原理鱼眼镜头是一种广角镜头,可以拍摄出非常宽广的景象,但同时也会产生畸变现象。
为了解决鱼眼镜头的畸变问题,人们研发出了鱼眼去畸变技术。
鱼眼去畸变技术是通过数学算法对鱼眼镜头拍摄的图像进行处理,使其恢复成正常的透视图像。
这样,人们在观看鱼眼镜头拍摄的图像时,就不会感到画面扭曲了。
鱼眼去畸变技术的原理是利用鱼眼镜头的成像特性进行逆向处理。
鱼眼镜头通过将光线引入一个非常大的视场角,使得光线从不同的角度进入镜头,然后在图像平面上形成一个圆形或半圆形的图像。
这个图像在中心部分看起来会比较正常,但在边缘部分会产生严重的畸变。
为了进行鱼眼去畸变处理,我们首先需要了解鱼眼镜头的畸变模型。
鱼眼镜头的畸变可以分为两种类型:径向畸变和切向畸变。
径向畸变是指由于光线经过鱼眼镜头时,透镜的形状不规则导致的畸变;切向畸变是指由于鱼眼镜头的成像平面和透镜的位置不一致导致的畸变。
对于径向畸变,我们可以使用多项式模型进行建模和矫正。
多项式模型可以通过一系列参数来描述鱼眼镜头的畸变情况,然后使用这些参数对图像进行处理,使其恢复成正常的透视图像。
多项式模型可以有效地矫正径向畸变,但对于切向畸变的矫正效果并不理想。
对于切向畸变,我们可以使用仿射变换或透视变换进行矫正。
这些变换可以通过调整图像的像素坐标来消除切向畸变。
仿射变换适用于对称的切向畸变,而透视变换适用于非对称的切向畸变。
通过对图像进行仿射变换或透视变换,我们可以将其恢复成正常的透视图像。
在实际应用中,鱼眼去畸变技术已经得到了广泛的应用。
比如在摄影领域,鱼眼去畸变技术可以使摄影师在使用鱼眼镜头进行拍摄时,不再受到畸变的困扰,拍摄出更加真实自然的图像。
在虚拟现实和增强现实领域,鱼眼去畸变技术可以使虚拟场景或增强现实场景更加真实逼真。
鱼眼去畸变技术是一种通过数学算法对鱼眼镜头拍摄的图像进行处理的技术,可以消除鱼眼镜头的畸变问题,使图像恢复成正常的透视图像。
这项技术在摄影、虚拟现实和增强现实等领域有着广泛的应用前景,为人们提供了更好的观看和体验效果。
应用光学广角镜头-鱼眼镜头

鱼眼镜头什么是鱼眼透镜众所周知,鱼在水面附近可以凝视(眼球不用转动)感知水面之上近乎180°角空域的景物,故通常认为鱼具有2π的仰仰视视角。
人类通过模仿鱼眼的这种特性发明了鱼眼镜头,最初的尝试在1919年,R.W.Wood在一个装满水的容器上盖上一块玻璃板并构成一针孔摄像机,实现了超广角摄影。
他用这种装置拍摄天空的云层,可形成近乎半球形空域。
由于总要带一个水箱,非常不便。
后来W.N.Bond改进了R.W.Wood的装置。
他用一个半球型玻璃透镜取代了水箱。
鱼眼仰视的启示鱼眼透镜的“进化”过程上图a,b为Bond的作品,c,d,e为后人对他作品的修正。
这些作品虽然是很伟大的努力,仍存在一些问题,首先,Bond利用单个平凸形后透镜成像,没有别的像差校正元件,成像质量不能令人满意,另外,他所使用的透镜不是一面凸面,一面凹面,这样无法消除场曲。
又因为他没有消除像差,所以小孔必须做的很小,这样会造成照度非常低,照度低的光学仪器实际意义不大。
随着科技的发展,今天的鱼眼镜头已经非常完善!!!2.鱼眼透镜的应用鱼眼透镜在摄影,电影,气象,天文,测试,医疗,边防等都有广泛的应用如下面彩图鱼眼透镜拍摄的校园这个貌似是从一个大坑里往外看,具体是什么呢?????这个很显然,可以看清很多人的面部!!3.鱼眼透镜原理简述(1)基本光路原理非常简单,类似光的全反射和光路可逆原理。
sin I=n*sin I (空气折射率约为1.水折射率为n=1.3333)则有ic=48.6°即鱼眼的张角在50°左右,此时鱼在水面附近可以”凝视”(不用转动眼球)岸边物体。
可以得出,此时鱼眼视场完全覆盖了水上近乎180°的范围。
所以在岸边的我们即使是在鱼的背后都很难抓到鱼!!(2)成像原理鱼眼镜头的成像原理比较复杂,这里进行简述。
鱼眼镜头的作用是模拟鱼类仰视水面的情况,其典型视场角是180°,还有的超过180°,220°甚至达到270°。
麦克斯韦鱼眼
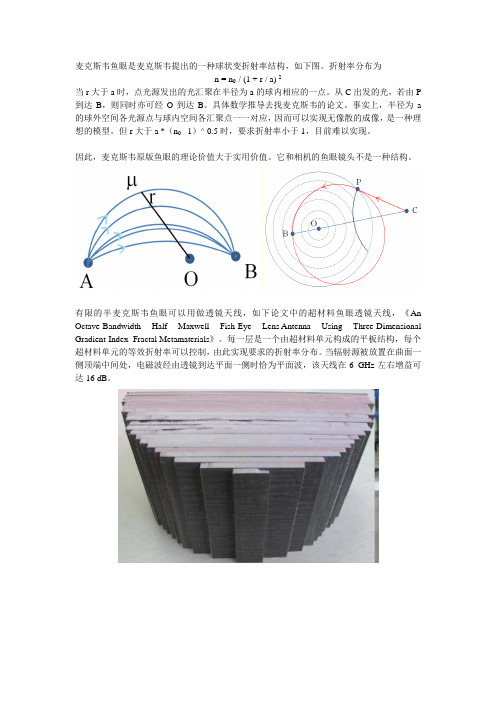
麦克斯韦鱼眼是麦克斯韦提出的一种球状变折射率结构,如下图。
折射率分布为
n = n0 / (1 + r / a) 2
当r大于a时,点光源发出的光汇聚在半径为a的球内相应的一点。
从C出发的光,若由P 到达B,则同时亦可经O到达B。
具体数学推导去找麦克斯韦的论文。
事实上,半径为a 的球外空间各光源点与球内空间各汇聚点一一对应,因而可以实现无像散的成像,是一种理想的模型。
但r大于a *(n0 - 1)^ 0.5时,要求折射率小于1,目前难以实现。
因此,麦克斯韦原版鱼眼的理论价值大于实用价值。
它和相机的鱼眼镜头不是一种结构。
有限的半麦克斯韦鱼眼可以用做透镜天线,如下论文中的超材料鱼眼透镜天线,《An Octave-Bandwidth Half Maxwell Fish-Eye Lens Antenna Using Three-Dimensional Gradient-Index Fractal Metamaterials》。
每一层是一个由超材料单元构成的平板结构,每个超材料单元的等效折射率可以控制,由此实现要求的折射率分布。
当辐射源被放置在曲面一侧顶端中间处,电磁波经由透镜到达平面一侧时恰为平面波,该天线在6 GHz左右增益可达16 dB。
鱼眼照片拍摄之鱼眼镜头与单反相机画幅的选择及影响
鱼眼照片拍摄之鱼眼镜头与单反相机画幅的选择及影响一、序言随着数字相机及镜头制造工艺的发展,一种特殊的超广角镜头——鱼眼镜头,在现实生活也得到得到了广泛的应用,比如在拍摄全景应用中,使用鱼眼镜头只需拍摄2-3张图片就可以很轻松的拼接出360度全景。
而鱼眼镜头的焦距在8-15mm,分为圆形鱼眼和对角线鱼眼,单反相机也分为尼康,佳能等几个品牌,相机画幅分为全画幅和APS-C 画幅,这几种参数的组合会使鱼眼镜头拍摄出来的图片有多种结果,比如水平180,垂直180的圆形鱼眼图,以及水平180,垂直150的扁形鱼眼图片等等。
下面将具体介绍这几种参数搭配选择和价格,拍摄效果。
二、什么是鱼眼镜头鱼眼镜头是一种焦距极短并且视角接近或者超过180度的镜头,鱼眼镜头是一种极端的广角镜头,为了使镜头达到最大的摄影视角,这种镜头的前景片直径切呈抛物状向镜头前部凸出,与鱼的眼睛颇为相似,因此称为鱼眼镜头。
众所周知,焦距越短,视角越大,而光学成像的变形也就越强烈。
为了达到180°的超大视角,鱼眼镜头的设计者不得不做出牺牲,允许变形的合理存在。
结果是出了画面中心的景物保持不变,其他水平或者垂直的景物都发生了相应的变化。
三、为什么选择鱼眼镜头实现广角的拍摄有很多中方法,有鱼眼镜头和超广角镜头。
超广角镜头的焦距一般都是13-24mm,鱼眼镜头焦距范围在6-16mm,常见的焦距是15mm,16mm。
但是鱼眼镜头和超广角镜头之间的区别不在焦距的超短,而在于视角的大小以及是否存在校正影像的畸变。
13mm的超广角镜头,它的视角场却只有118°,而17mm的鱼眼镜头,视场角已达到180°,超广角和其他普通镜头一样,竭力校正画面边缘出现的畸变,力争与拍摄的画面与实物相一致。
而鱼眼镜头则有意的保留影像的桶形畸变,以夸张其变形效果,拍出的画面出了中心部位以外,其他直线都会变成弯曲的弧线。
选择鱼眼镜头,拍摄的图片视角大,拼接成360°的全景图形只需要拍摄2-3张图片即可,而鱼眼镜头画面的畸变可以通过校正算法进行恢复。
浅谈俄产的鱼眼镜头
照相机 73所谓的鱼眼镜头是一种极端的超广角镜头,属于超广角镜头中的一类特殊镜头。
这类镜头因为视角极大,前镜片通常前部非常的凸出,跟鱼眼非常类似,因而得名鱼眼镜头。
这类镜头通常焦距极短,而视角通常能达到180°以上。
极端的能超过220°。
对135系统而言,其焦距多在6~17mm左右。
这里需要说明的是,鱼眼镜头的焦距不一定都是小于超广角镜头的。
例如有的镜头焦距在13mm,但它的视角只有120°,那这只是一只超广角镜头。
而有的17mm焦距的,视角达到了180°了,这就是一只鱼眼镜头了。
所以是否是鱼眼镜头,最关键还是看镜头的视角。
鱼眼镜头成像是非常有特点的,因为鱼眼镜头的视角已经远远超出人眼的范畴,因此产生的效果也跟我们实际观察到的景物有较大差异。
鱼眼镜头的成像有浅谈俄产的鱼眼镜头在当下的数码摄影时代,众多的摄影玩家开始玩镜头的转接,把历来的众多老摄影镜头,甚至是工业相机、电影机镜头或投影机的镜头等等,通通拿来搞转接和改口。
通过转接环或者镜头改口的方式转接到数码相机上使用,这是把传统光学和现代数码记录介质的结合。
别看这些老镜头年代久远或身体老迈,但其中很多镜头的光学素质一流,而且有的价格还非常的实惠,有的则被称为成像有“味道”。
玩老镜头转接的玩家越来越多,尤其是在广角端和长焦端。
喜欢摄影的朋友都知道,在摄影镜头中,在焦距两端的广角和长焦镜头,通常都价格昂贵。
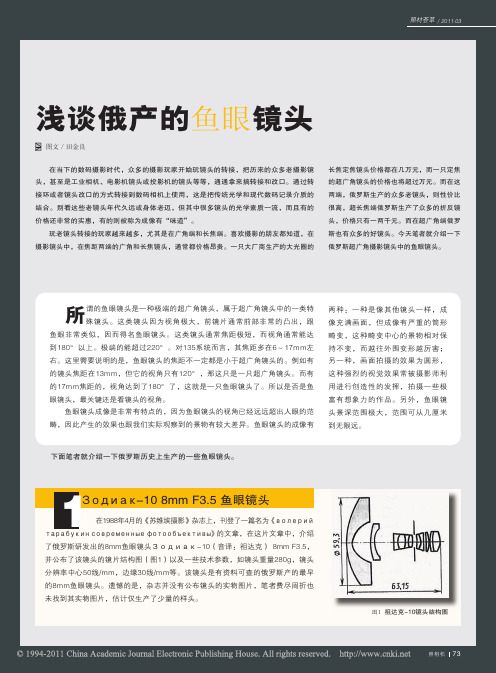
一只大厂商生产的大光圈的1 Зодиак-10 8mm F3.5 鱼眼镜头在1988年4月的《苏维埃摄影》杂志上,刊登了一篇名为《волерийтарабукин современные фотообъективы》的文章,在这片文章中,介绍了俄罗斯研发出的8mm鱼眼镜头Зодиак-10(音译:祖达克) 8mm F3.5,并公布了该镜头的镜片结构图(图1)以及一些技术参数,如镜头重量280g,镜头分辨率中心50线/mm,边缘30线/mm等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
cv::fisheye::CALIB_FIX_K1 = 1 << 4,
cv::fisheye::CALIB_FIX_K2 = 1 << 5,
cv::fisheye::CALIB_FIX_K3 = 1 << 6,
Undistorts 2D points using fisheye model. More...
Detailed Description
Definitions: Let P be a point in 3D of coordinates X in the world reference frame (stored in the matrix X) The coordinate vector of P in the camera reference frame is:
Fisheye camera model
Camera Calibration and 3D Reconstruction
Namespaces
cv::fisheye
The methods in this namespace use a so-called fisheye camera model.
The pinhole projection coordinates of P is [a; b] where
a=x/z and b=y/zr2=a2+b2θ=atan(r)
Fisheye distortion:
θd=θ(1+k1θ2+k2θ4+k3θ6+k4θ8)
The distorted point coordinates are [x'; y'] where
Performs camera calibaration. More...
void cv::fisheye::distortPoints (InputArray undistorted, OutputArray distorted, InputArray K, InputArray D, double alpha=0)
double cv::fisheye::stereoCalibrate (InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints1, InputArrayOfArrays imagePoints2, InputOutputArray K1, InputOutputArray D1, InputOutputArray K2, InputOutputArray D2, Size imageSize, OutputArray R, OutputArray T, int flags=fisheye::CALIB_FIX_INTRINSIC, TermCriteria criteria=TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 100, DBL_EPSILON))
x′=(θd/r)ay′=(θd/r)b
Finally, conversion into pixel coordinates: The final pixel coordinates vector [u; v] where:
u=fx(x′+αy′)+cxv=fyy′+cy
Enumeration Type Documentation
void cv::fisheye::projectPoints (InputArray objectPoints, OutputArray imagePoints, const Affine3d &affine, InputArray K, InputArray D, double alpha=0, OutputArray jacobian=noArray())
Stereo rectification for fisheye camera model. More...
void cv::fisheye::undistortImage (InputArray distorted, OutputArray undistorted, InputArray K, InputArray D, InputArray Knew=cv::noArray(), const Size &new_size=Size())
Xc=RX+T
where R is the rotation matrix corresponding to the rotation vector om: R = rodrigues(om); call x, y and z the 3 coordinates of Xc:
x=Xc1y=Xc2z=Xc3
anonymous enum
Enumerator
CALIB_USE_INTRINSIC_GUESS
CALIB_RECOMPUTE_EXTRINSIC
CALIB_CHECK_COND
CALIB_FIX_SKEW
CALIB_FIX_K1
CALIB_FIX_K2
CALIB_FIX_K3
Distorts 2D points using fisheye model. More...
void cv::fisheye::estimateNewCameraMatrixForUndistortRectify (InputArray K, InputArray D, const Size &image_size, InputArray R, OutputArray P, double balance=0.0, const Size &new_size=Size(), double fov_scale=1.0)
Computes undistortion and rectification maps for image transform by cv::remap(). If D is empty zero distortion is used, if R or P is empty identity matrixes are used. More...
Transforms an image to compensate for fisheye lens distortion. More...
void cv::fisheye: OutputArray undistorted, InputArray K, InputArray D, InputArray R=noArray(), InputArray P=noArray())
cv::fisheye::CALIB_FIX_K4 = 1 << 7,
cv::fisheye::CALIB_FIX_INTRINSIC = 1 << 8,
cv::fisheye::CALIB_FIX_PRINCIPAL_POINT = 1 << 9
}
Functions
Logo
OpenCV 3.1.0-dev
Open Source Computer Vision
Main Page
Related Pages
Modules
+Namespaces
+Classes
+Files
Examples
Sphinx Documentation
Namespaces | Enumerations | Functions
CALIB_FIX_K4
CALIB_FIX_INTRINSIC
CALIB_FIX_PRINCIPAL_POINT
Function Documentation
double cv::fisheye::calibrate ( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints,
const Size & image_size,
InputOutputArray K,
InputOutputArray D,
OutputArrayOfArrays rvecs,
OutputArrayOfArrays tvecs,
Performs stereo calibration. More...
void cv::fisheye::stereoRectify (InputArray K1, InputArray D1, InputArray K2, InputArray D2, const Size &imageSize, InputArray R, InputArray tvec, OutputArray R1, OutputArray R2, OutputArray P1, OutputArray P2, OutputArray Q, int flags, const Size &newImageSize=Size(), double balance=0.0, double fov_scale=1.0)
Estimates new camera matrix for undistortion or rectification. More...
void cv::fisheye::initUndistortRectifyMap (InputArray K, InputArray D, InputArray R, InputArray P, const cv::Size &size, int m1type, OutputArray map1, OutputArray map2)