天宝自动监测解决方案
国产高精度位置和姿态测量系统
国产高精度位置和姿态测量系统LDPOS的发展与应用周落根邓晓光洪勇(摘要:本文详细介绍了高精度位置和姿态测量系统的发展,我国具有完全自主知识产权的移动测量和实景三维技术和产品的研究、应用和服务情况,以及地面无控航测系统,并对其未来的发展进行展望。
关键词:高精度位置和姿态测量系统LDPOS地面无控航测系统一引言高精度位置和姿态测量系统(Position and Orientation System, POS)集全球导航卫星系统、惯性测量单元、导航处理计算机技术于一体,可以实时获取运动物体的高精度空间位置和三维姿态信息,广泛应用于飞机、轮船和陆地载体的导航定位。
POS通过全球导航卫星系统(Global Navigation Satellite System ,GNSS)接收定位数据,利用高精度光学陀螺捷联惯性测量单元(Inertial Measurement Unit,IMU)提供设备瞬间的速度、加速度和方向信息,然后通过数据处理与融合软件对所接收的定位定姿信息进行数据处理,获得载体设备的高精度位置及姿态信息,同时给载荷传感器提供高精度同步信息,直接解算观测成果的高精度外方位元素,输出具有直接地理参考的影像数据。
POS解决了GNSS动态可靠性差,会出现信号遮挡、丢失,同时数据输出的频率低等问题。
POS系统将GNSS长期、低动态定位精度高的特性与惯性导航系统QNS)的短期、高动态定位精度高的性能有机地结合起来,不但提高了系统的精度,加强了系统的抗干扰能力,同时解决了GNSS动态应用采样频率低的问题。
POS系统可为载体或航空传感器提供高精度、高频率(200HZ)的实时位置与姿态(X,Y,Z,e,3, K)数据,应用于各种不同类型的传感器:如航空胶片或数字相机、线阵扫周落根,立得空间信息技术股份有限公司副总经理;邓晓光、洪勇,立得空间信息技术股份有限公司。
描仪、激光扫描仪、合成孔径雷达、成像光谱仪等。
在崇山峻岭、戈壁荒漠等难以通行的地区,如国界、沼泽滩涂等作业员根本无法到达的地区,采用POS系统和航空摄影系统集成进行直接空间对地定位,可迅速、及时地获取多频段、多时相、高精度、高分辨率的位置与图像信息,快速高效地编绘基础地理图件,大大提高了作业效率和成功率。
天宝RTK使用说明书
第一章:TSC2操作使用说明1.前言Trimble TSC2是Trimble公司新推出的控制手簿,采用Microsoft Widows Mobile软件的Pocket PC操作系统。
该控制手簿配有USB和RS232串口通讯端口,集成蓝牙、充和512MB内置非易失性存储器,两个CF卡和一个电器与一体。
TSC2具有128MB SDRAMSD卡可扩展插槽,处理器采用520MHz Intel PXA 270 Xscale CPU。
2.电源管理TSC2手薄含内置可充电锂电池一块,容量为6600mAh,充电时连接AC适配器到交流电源。
正常操作条件下电池充足电可用30小时,充电时间< 3小时,2小时内充电到80%,完全充电需要4.5个小时。
注意:充电温度为10℃以上。
3.部件维护Trimble产品的设计考虑了承受野外出现的典型恶劣情况,但是设备本身却是高精度的电子仪器,使用时需要注意保护。
Trimble建议在每天的使用中按以下方法维护你的设备,以防物理损坏或数据丢失。
TSCe:工作温度: -30℃~+60℃储藏温度: -40℃~+70℃湿度:100%防冷凝跌落:可经受26次跌落,从1.22m跌落到坚硬表面注:请勿把设备长时间的放置在阳光直射的环境下;确保显示屏不被撞击、挤压和磨损;设备可抵挡大风雨和沙尘;TSC2手簿可承受浸入水下一米,迟续一个小时之久。
4.触摸屏维护用略沾干净水或玻璃清洁剂的柔软湿布擦拭控制器,不要把清洁剂直接用在屏幕上,把清洁剂倒在软布上然后轻轻擦拭屏幕。
TSCe&ACU手薄长时间使用后可更换屏幕保护膜注:不要使用研磨清洁剂。
5.常用键说明①Power电源键:除了具有电源开关功能之外,还有其它重要功能。
背景灯开关:按下Fn键后再按Power电源键。
Power电源键菜单:按住电源键大约3秒屏幕出现一个记时界面,如果这时继续按住电源键直到记时为零,手簿进行软启动。
如果这时松开电源键,出现下面对话框,按OK退出该界面,进入系统主界面。
天宝R8-GPS测量系统

天宝R8-GPS测量系统操作方法一、蓝牙连接设置(基准站)二、基准站配置三、任务与投影参数设置四、启动基准站五、蓝牙连接设置(流动站)六、流动站配置七、启动流动站八、工地校正九、测量点十、放样十一、数据传输十二、接收机说明十三、电台说明十四、常见问题一蓝牙连接设置(基准站)启动Trimble Survey Controller测量软件1、配置----控制器----蓝牙连接到GPS接收机:如果我们已经连过该接收机,就在连接到GPS接收机的下拉列表里选择。
如果下拉列表中没有该接收机的SN,那么我们点击配置,进行下一步的配置。
2配置----正在等待蓝牙配置----蓝牙配置窗口界面中:Turn on BlueTooth是打开蓝牙,必须选中此项。
Make this device discover to other devices使别的蓝牙设备能够发现本手簿,可选项。
注:接收机的SN可以在接收机的机身上查看。
3点击下面的Device(设备)选项点击New Partnership…开始搜索新设备如果有Trimble的GPS接收机已经开机的情况下,我们的手簿能搜索到该设备。
选中该设备(框中),点击Next----会弹出Enter Passkey(输入密码)对话框,直接点击Next(下一步),点击Finish。
蓝牙设备成功添加后就会在New Partnership…下面列出,点击OK(右上角)。
4、在 (连接到GPS接收机) 的列表中,选择您的接收机型号稍等片刻,就能看到手簿和接收机连通,在右侧的面板上显示接收机的当前信息,此时可以正常继续下一步工作。
二基准站配置我们只需要第一次使用该手簿的时候进行该项配置,通常在正常作业过程中不需要再进行设置。
Trimble Survey Controller测量软件1、配置----测量形式----RTK----基准站选项测量类型:RTK,播发格式:CMR+输出附加代码RTCM(不勾),测站索引默认29,截止高度角默认10度。
智能监测实施方案

智能监测实施方案一、背景介绍随着科技的不断发展,智能监测技术在各个领域得到了广泛的应用。
智能监测技术通过传感器、数据采集系统和数据分析算法,实现对各种设备、环境和生产过程的实时监测和分析,为企业提供了更加精准、高效的管理手段。
因此,制定一套科学合理的智能监测实施方案对于企业的发展至关重要。
二、制定智能监测实施方案的必要性1. 提高生产效率:智能监测技术可以实时监测设备运行状态,提前发现问题并进行预防性维护,从而减少停机时间,提高生产效率。
2. 降低成本:通过对设备运行数据的分析,可以优化生产过程,降低能耗和原材料消耗,从而降低生产成本。
3. 提升产品质量:实时监测生产过程中的关键参数,及时调整生产参数,保证产品质量稳定。
4. 提高安全性:对危险环境和设备进行实时监测,及时发现安全隐患,确保生产安全。
5. 提升管理水平:通过对生产数据的分析,可以为管理者提供决策支持,提升管理水平。
三、智能监测实施方案的具体内容1. 硬件设备的选型:根据实际监测需求,选择合适的传感器、数据采集设备和监测仪器。
2. 数据采集系统的建设:建立数据采集系统,实现对各种监测设备的数据采集和传输。
3. 数据分析算法的开发:开发针对不同监测对象的数据分析算法,实现对监测数据的实时分析和处理。
4. 监测平台的建设:建设监测平台,实现对监测数据的实时展示、报警和远程控制。
5. 管理系统的完善:建立智能监测管理系统,实现对监测设备和数据的统一管理。
6. 人员培训和应急预案:对相关人员进行智能监测技术的培训,制定智能监测的应急预案。
四、智能监测实施方案的实施步骤1. 确定监测需求:明确监测的对象和监测的指标,确定监测的目的和范围。
2. 设备选型和采购:根据监测需求,选择合适的硬件设备,并进行采购。
3. 系统建设和调试:进行数据采集系统和监测平台的建设和调试,确保系统稳定运行。
4. 数据分析算法的开发:根据监测需求,开发相应的数据分析算法。
天宝GPS简易操作手册
操作手册一、外业采集软件T ERRASYNC (2)一、状态 (7)二、数据 (9)三、导航 (13)四、地图 (14)五、图形 (16)二、内业软件PATHFINDER OFFICE (20)1、启动GPS P ATHFINDER O FFICE S OFTWARE 软件 (20)2.采集数据 (29)3.P ATHFINDER O FFICE 软件的各功能 (31)一:坐标系统 (31)二:数据字典的编辑 (36)三:数据转换器 (43)四:差分改正外业数据 (44)五:打开数据文件 (50)六:显示图形和时线窗口 (50)七:导出需要格式的数据 (51)八:装载背景文件 (54)九:查看一个要素的属性: (57)一、外业采集软件TerrasyncTerraSync 软件专为采集和更新GIS 和空间数据而设计。
TerraSync 软件相当于控制软件。
它与连接到外业现场计算机的Trimble GPS 接收机进行通信,允许您在接收机中设置GPS 参数、在外业现场计算机上记录GPS 位置以及更新已有GIS 数据。
TerraSync 软件可与多种实时差分改正信息源完美组合,其中包括组合信标接收机、组合卫星接收机、组合WAAS/EGNOS 接收机、外部无线电接收机、VRS™或Beacon-on-a-Belt (BoB™) 接收机。
TerraSync 软件提供现场任务规划及数据字典创建与编辑功能。
GPS Pathfinder Office 软件可与TerraSync 软件配合工作,实现高级的任务规划和数据字典创建、数据传输、数据导入导出和后处理等功能。
使用TerraSync 软件可以:•更新已有的GIS 数据•采集GIS 或空间数据库的数据•在外业现场导航Terrasync是一套强大的外业数据采集软件,专门为快速和高效率的数据采集更新设计。
配合Trimble的GPS接收机和野外手簿使用,将为你的GIS系统提供高质量的属性和定位数据。
天宝RTK使用说明书

WORD 格式整理版第一章:TSC2操作使用说明1.前言Trimble TSC2 是Trimble 公司新推出的控制手簿,采用Microsoft Widows Mobile 软件的Pocket PC操作系统。
该控制手簿配有USB和RS232串口通讯端口,集成蓝牙、充电器与一体。
TSC2具有128MB SDRAM 和512MB内置非易失性存储器,两个CF卡和一个SD卡可扩展插槽,处理器采用520MHz Intel PXA 270 Xscale CPU。
2.电源管理TSC2手薄含内置可充电锂电池一块,容量为6600mAh,充电时连接AC适配器到交流电源。
正常操作条件下电池充足电可用30小时,充电时间< 3小时,2小时内充电到80%,完全充电需要 4.5 个小时。
注意:充电温度为10℃以上。
3.部件维护Trimble 产品的设计考虑了承受野外出现的典型恶劣情况,但是设备本身却是高精度的电子仪器,使用时需要注意保护。
Trimble 建议在每天的使用中按以下方法维护你的设备,以防物理损坏或数据丢失。
TSCe:工作温度:-30 ℃~+60℃储藏温度:-40 ℃~+70℃湿度:100%防冷凝跌落:可经受26次跌落,从 1.22m跌落到坚硬表面注:请勿把设备长时间的放置在阳光直射的环境下;确保显示屏不被撞击、挤压和磨损;设备可抵挡大风雨和沙尘;TSC2手簿可承受浸入水下一米,迟续一个小时之久。
学习好帮手WORD 格式整理版4.触摸屏维护用略沾干净水或玻璃清洁剂的柔软湿布擦拭控制器,不要把清洁剂直接用在屏幕上,把清洁剂倒在软布上然后轻轻擦拭屏幕。
TSCe&ACU手薄长时间使用后可更换屏幕保护膜注:不要使用研磨清洁剂。
5.常用键说明①Power电源键:除了具有电源开关功能之外,还有其它重要功能。
背景灯开关:按下Fn键后再按Power电源键。
Power电源键菜单:按住电源键大约3秒屏幕出现一个记时界面,如果这时继续按住电源键直到记时为零,手簿进行软启动。
天宝测量软件操作说明

1,启动TA软件打开手簿电源开关,进入TSC2手簿初始界面点击Start,在下拉菜单中选择Trimble Access程序并打开进入TA软件初始界面2,设置连接在上图中点击设置,进入下图点击连接,进入下图点击蓝牙,进入下图点击右下角的配置,进入下图等待几秒,进入下图勾选第一项(打开蓝牙),第二项可选可不选(使蓝牙可见),点击左下角的 Devices,进入下图保证接收机处于开机状态,点击“New Partnership”(新的合作伙伴关系),出现下图此时搜索到了蓝牙接收机,R8-2 至接收机类型,是 R8 GNSS 的,后面的 4736138574 是接收机的序列号,也就是我们常说的S/N(Serial Nomber),这个号码每台机器只有一个(在接收机端口 1左侧的条形码上方),而且不会有重复的,后面是 Trimble 的厂牌,选中要添加的设备,点击右下角的“Next”,进入下图天宝的所有机型连接不需要任何密码,直接点击“Next”进入下图点击“Finish”完成这台机器的配对,出现下图这时设备列表里面就有了我们刚才添加的设备了,可以按照此方法添加更多的蓝牙设备。
添加蓝牙设备完成后,点击右上角的“OK”回到 TSC 软件中,进入下图此时,第一项连接到 GNSS 流动站/基准站下拉列表里面就有了蓝牙设备可选,如下图TA软件只要在这里设置好基准站和流动站以后,当连接GPS接收机时,软件就会自动连接上接收机,需要注意的是,一定要保证所架设的基准站和流动站不要混淆,以免不能进行测量。
3,设置测量形式(此项操作只在第一次使用仪器时配置,配置好了以后再进行测量不需要改动,当然最好也不要改动,以免改乱了配置无法进行测量)点击设置进入下图点击测量形式,进入设置界面点击测量形式中的RTK,则软件自动跳转到编辑这个测量形式的界面点击流动站选项,进入下图按照上图设置好,点击 1/4 图标翻到下一页上图中天线类型根据不同的接收机选择,不同的接收机选择不同的类型,此图中是以 R8GNSS 为例来设置的,测量到都是选择“天线座底部”(因为是流动站,是装在对中杆上的) 5700/R7 接收机的天线类型小盘天线是Zephyr 大盘天线是 Zephyr Geodetic 5800/R8 接收机的天线类型R8/5800/Sps 78x internalR7GNSS 接收机的天线类型小盘天线是 Zephyr Mod2 大盘天线是Zephyr Geod-2 按照上图设置好后,点击 2/4进入下一页天线高输入固定的杆高 2m。
天宝电子水准仪后处理软件开发

memo3.Lines.Add(bno+','+ zno+','+ gc+','+cznum+',1');//输
入测段起、终点,高差与测站数
……
memo3.Lines.SaveToFile(ExtractFilePath(fname)+'科傻水
准平差源文件.in1');
2 结语
本文通过 Delphi 与 Excel 开发工具,实现了天宝电子水准 仪后处理软件观测手簿等功能,探讨了电子水准测量数据后处 理的一般方法。利用其它软件平台的开发实现方法与此类似。 软件在湖南筱溪水电站监测网水准观测中得到应用,提高了数 据处理效率。软件还应结合相应的技术规范及日常管理工作做 进一步的改进,增加新的功能,提高操作的便捷性。 参考文献
(3)数据预处理。执行“数据预处理”操作,程序按指定 规则去除源文件中类似测站重测、测点重测等冗余标识信息, 使文件更整齐,便于后续数据处理。
(4)水准观测手簿生成。执行“水准观测手簿生成”操作, 程序按观测文件、观测测段逐个生成原始观测手簿,手簿第一 页为各测段统计信息,手簿第二页起为观测数据,为每测段测 站观测数据。
(5)生成科傻平差.in1 文件。选择“生成科傻平差.in1 文 件”选项,可以在手簿生成的同时,生成科傻平差高程观测.in1 文件,做为后续平差处理的源文件。 流程设计
根据功能结构,设计本程序的运行流程: (2)主要功能模块代码设计 程序开发平台选择 Delphi7.0 与 MSOffice,前者主要负责数 据提取、分离、计算,后者负责手簿模板制作,前者直接调用 后者,完成一体化作业。 数据预处理
天宝4800GPSrtk工作原理
RTK的工作原理是将一台接收机置于基准站上,另一台或几台接收机置于载体(称为流动站)上,基准站和流动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。
然后将这个改正值通过无线电数据链电台及时传递给共视卫星的流动站精化其GPS观测值,从而得到经差分改正后流动站较准确的实时位置。
精密GPS定位均采用相对技术。
无论是在几点间进行同步观测的后处理(RTK),还是从基准站将改正值传输给流动站(DGPS),这些都称为相对技术,以采用值的类型为依据可分为4类:(1)实时差分GPS,其精度为1m~3m;(2)广域实时差分GPS,其精度为1m~2m;(3)精密时差分GPS,其精度为1cm~5cm;(4)实时精密时差分GPS,其精度为1cm~3cm。
差分的数据类型有伪距差分、坐标差分和相位差分三类。
前两类定位误差的相关性,会随基准站与流动站的空间距离的增加而迅速降低。
故RTK采用第三类方法。
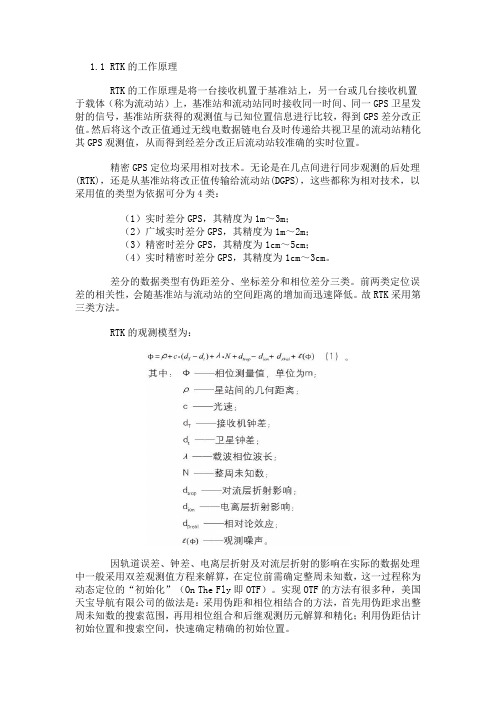
RTK的观测模型为:因轨道误差、钟差、电离层折射及对流层折射的影响在实际的数据处理中一般采用双差观测值方程来解算,在定位前需确定整周未知数,这一过程称为动态定位的“初始化”(On The Fly即OTF)。
实现OTF的方法有很多种,美国天宝导航有限公司的做法是:采用伪距和相位相结合的方法,首先用伪距求出整周未知数的搜索范围,再用相位组合和后继观测历元解算和精化;利用伪距估计初始位置和搜索空间,快速确定精确的初始位置。
我们以美国天宝导航有限公司生产的4800GPS双频接收机为例介绍RTK系统组成。
天宝RTK系统由两部分组成,如图1所示。
图1 天宝RTK系统组成二、RTK系统基准站的组成和作用RTK系统基准站由基准站GPS接收机及卫星接收天线、无线电数据链电台及发射天线、直流电源等组成,如图2所示。
RTK系统基准站的作用是求出GPS实时相位差分改正值,然后将改正值通过数传电台及时传递给流动站以精化其GPS观测值,进而得到更为精确的实时位置信息。
智能监测平台实施方案
智能监测平台实施方案随着科技的不断发展,智能监测平台在各个领域得到了广泛的应用。
智能监测平台是指利用先进的传感器技术、物联网技术、大数据分析技术等,对各种设备、环境、人员等进行实时监测和数据采集,以实现对信息的及时、准确的获取和分析,为决策提供科学依据的一种综合性监测系统。
本文将就智能监测平台的实施方案进行详细介绍。
一、智能监测平台的基本组成1.传感器网络:传感器是智能监测平台的基础设备,通过传感器网络可以实现对各种参数的实时监测,如温度、湿度、压力、流量、电流、电压等。
传感器网络的建设需要考虑传感器的类型、数量、布设位置等因素。
2.数据采集与传输系统:数据采集与传输系统是将传感器采集到的数据进行处理和传输的关键环节,包括数据采集设备、通信设备、数据传输协议等。
数据采集与传输系统的设计需要考虑数据的实时性、准确性和安全性。
3.数据存储与管理系统:数据存储与管理系统是对采集到的数据进行存储、管理和分析的关键环节,包括数据库、数据管理软件、数据分析算法等。
数据存储与管理系统的设计需要考虑数据的存储容量、数据的查询速度、数据的安全性等因素。
4.监测平台软件:监测平台软件是对整个智能监测平台进行综合管理和控制的关键环节,包括监测数据的可视化显示、监测参数的设置与调整、监测数据的分析与报告等功能。
监测平台软件的设计需要考虑用户界面的友好性、功能的完备性、系统的稳定性等因素。
二、智能监测平台的实施方案1.需求分析:在实施智能监测平台之前,首先需要进行需求分析,了解用户的监测需求,包括监测的对象、监测的参数、监测的精度要求、监测的时效性要求等。
只有充分了解用户的需求,才能设计出满足用户需求的智能监测平台。
2.系统设计:根据需求分析的结果,进行智能监测平台的系统设计,包括传感器网络的布设方案、数据采集与传输系统的设计方案、数据存储与管理系统的设计方案、监测平台软件的设计方案等。
系统设计需要考虑整个监测系统的稳定性、可靠性、实用性等因素。
天宝GPS测量控制器操作手册

图2 9、把需要的数据全部导入到手簿中,则准备工作完成。
连接、设置基准站
① 连接基准站 1、 首先将基准站三脚架安置在要架设基准站的位置,将基准站接收机通过基座安装在 三脚架上,之后进行对中、整平。 2、 若是使用外置电台,还需要连接外置电台。首先将电台与鞭状天线通过线缆进行连 接;之后再将电台与基准站接收机通过线缆进行连接;最后接上电源。(注意接线顺 序,一定要先接鞭状天线,否则会烧坏电台)。若是通过交流电瓶对电台供电,首先 连接电瓶的负极(黑色),然后再连接电瓶的正极(红色)。拆的时候先拆正极(红 色),再拆负极(黑色)。 3、 打开基准站接收机,测量仪器高(一般采用控制点到 GPS 天线护圈中心的高度)。
图标切换测
图 22 2 根据实际地形情况测出土方的边界。图 23
二、测量表面点
图 23
1 点击 切换测量类型选项选择表面点选项。图 24
图 24 2 根据实际地形,在土方边界范围内,测出地形特征点。如图 25
三、进行土方计算
图 25
1 点击
图标选择检查和编辑表面,图 26
图 26
2 点击 计算土方图标—选择边界(在触摸屏上直接点击选择)。图 27
图8 二、建立工地时未导入控制点信息 未导入控制点校准分两种情况:1 现在输入控制点的坐标、2 在任意位置上校准。如图 9
图9
1、现在输入控制点的坐标、可以现场输入控制点坐标,输入坐标值后校准步骤与已有控制 点校准步骤 1-5 相同。 2、在任意位置上校准、为系统假定一个坐标值进行单点校准。(适用于无需知道实地坐标值 只需进行长度、面积、土方量、角度计算等情况)。选择后输入假定坐标值进行单点校准。 如图 10
② 设置基准站 首先打开 SCS900 软件主菜单中的“系统设定”子菜单。选择“设置基准站”选项。
CORS介绍天宝GPS单基站天宝VRS网络RTK
CORS技术简介连续运行参考站系统(Continuous Operational Reference System,简称CORS系统)可以定义为一个或若干个固定的、连续运行的GPS/GNSS 参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户提供经过检验的不同类型的GPS观测值(载波相位,伪距),各种改正数、状态信息,以及其他有关GPS服务项目的系统。
它是目前GPS测量技术发展的一个方向,是网络RTK 技术和GPS主板技术的发展的产物,它的产生弥补了一些传统的RTK的不足,促进了GPS在测量和其他领域的应用。
CORS技术在用途上可以分成单基站CORS、多基站CORS和网络CORS。
一、单基站CORS和多基站CORS单基站CORS:就是只有一个连续运行站。
类似于一加一或一加多的RTK,只不过基准站由一个连续运行的基站代替,基站同时又是一个服务器,通过软件实时查看卫星状态、存储静态数据、实时向Internet发送差分信息以及监控移动站作业情况。
移动站通过GPRS\CDMA网络通讯和基站服务器通讯。
多基站CORS:就是分布在一定区域内的多个单基站联合作业,基站及基站之间的距离不超过50公里,他们都将数据发送到一个服务器。
流动站作业时,只要发送它的位置信息到服务器,系统自动计算流动站及各个基站之间的距离,将距离近的基站差分数据发送给流动站。
这样就确保了流动站在多基站CORS覆盖区域移动作业时,系统总能够提供离距流动站最近的基站差分数据已达到最佳的测量精度间。
单基站CORS和多基站CORS解决了传统RTK作业中①用户需要架设本地的参考站,且架设参考站时含有潜在的粗差②没有数据完整性的监控③需要人员留守看护基准站,生产效率低④通讯不便⑤电源供给不便等问题1.1、单基站CORS作业原理基准站连续不间断的观测GPS的卫星信号获取该地区和该时间段的“局域精密星历”及其他改正参数,按照用户要求把静态数据打包存储并把基准站的卫星信息送往服务器上Eagle软件的指定位置。
天宝GPS RTK简要流程

武汉天宝耐特科技有限公司
c 建立新任务 此步基准站与流动站都需做 但如果是用同一个控制器则流动站可省去此 步骤 在控制器中选择任务\新建任务 输入任务名 确认
1 对于坐标系统的选择 一般选 键入参数 或 从其它任务中拷贝 现以北京 54 为例 选 键入参数 回车 配置任务的坐标系统投影参数
例 北京 54 的投影可设为横轴墨卡托投影 假北 0 m 假东 500,000 m 纬度原点 0 度 中央子午线视测区而定(根据公式 3N 或 6N-3 计算) 比例因子 1 椭球长半轴 6378245m 扁率 298.3
基准站应输入已知点的精确坐标 但在 PPK 后处理动态 时可在输入已知坐标 时选择 此处 接收机将以基准站仪器单点定位 按下 开始 对应的 F1 控制器上就会出现 断开控制器与接收机连接 提示 而且 在电台的右上角出现 TRANS 在闪动
TRIMBLE 双频 RTK5700 系统简要说明
武汉天宝耐特科技有限公司
选择测量\Trimble RTK\启动基准站接收机 此时要输入点名与点坐标 天线高
使用过的已知点将直接调出点名而不显示测站坐标,此时使用的是上次使用此站时 输入的点位坐标 第一次使用的已知点会要求输入点位的三维坐标 点位坐标格式可以 以三种形式输入 WGS-84 大地坐标 WGS-84 地方坐标系大地坐标 LOCAL 地 方坐标系平面坐标 GRID
TRIMBLE 双频 RTK5700 系统简要说明
武汉天宝耐特科技有限公司
注意 中心经度 指测区所在地的中央子午线的经度
投影带 进行计算 即
3 度带中央子午线所在的经度为:
3N
6 度带中央子午线所在的经度为:
6N-3
若不知中央子午线的经度
可以用
天宝Trimble R10介绍

Trimble SurePoint 精密定点 控制技术,可获得精确的 位置
Trimble xFill 断点续测技术, 在差分信号连接中断期间仍 然能提供RTK测量
Trimble 360全星座接收技 术,全方位的卫星跟踪
先Байду номын сангаас的人机工程学设计,更 简单易用
–– GPS:L1C/A、L1C、L2C、L2E、L5 –– GLONASS:L1C/A、L1P、L2C/A、L2P、L3 –– SBAS:L1C/A、L5 (对于支持L5的SBAS卫星) –– Galileo:GIOVE-A和GIOVE-B、E1、E5a、E5B –– COMPASS:B1、B2、B3 • OmniSTAR HP、XP、G2、VBS定位 • QZSS、WAAS、MSAS、EGNOS、GAGAN • 定位速率:1 Hz、2 Hz、5 Hz、10 Hz 和 20 Hz
网络RTK3 水平. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 mm + 0.5 ppm RMS 垂直. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 mm + 0.5 ppm RMS RTK启动时间(对于具体精度)4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–8 秒
Trimble SurePoint 精密定点控制技术
天宝dini03系列数字水准仪i角误差检校及误差分析毕业设计说明书(论文)[管理资料]
![天宝dini03系列数字水准仪i角误差检校及误差分析毕业设计说明书(论文)[管理资料]](https://img.taocdn.com/s3/m/778df3d32f60ddccdb38a0c8.png)
1 绪论随着科学技术特别是电子技术的迅速发展,数字水准仪在水准测量中被广泛应用。
它融电子技术、图像处理技术、计算机于一体,以条码间隔影像信息与参考信号进行图像数学处理的测量原理,自动采集测量数据、信息处理和获取自动记录每一个观测值,从而实现水准测量仪器的发展方向。
虽然数字水准仪具有将测定的i角存入机内,并对所测数据按该i角进行自动修正功能,但仪器i角受外界温度、湿度、振动的影响而瞬时变化仍然存在。
因此,研究讨论数字水准仪i角问题非常有必要。
天宝DiNi03系列数字水准仪——世界上精度最高的数字水准仪之一,其各项指标都明显优于其他数字水准仪。
其性能卓越、操作方便,使水准测量进入了数字时代,大大提高了生产效率。
已广泛应用于地震、测绘、电力、水利等系统,在各项重大工程中发挥着强大的作用。
由此天宝DiNi03系列数字水准仪i角问题研究显得尤为重要。
目前,水准仪的i角研究主要反映在三个方面,即:方法、速度和精度。
关于i角的检校方法,我们比较成熟,许多测量学类教材中,就提供了一种广泛采用的方法。
近年电子水准仪i角自动检校中,又出现了其他三种新方法。
在提高检验水准仪i角的速度上,也出现了一些研究成果,电子水准仪的自动化检校更是大大提高了检校水准仪i角的速度。
在评定水准仪i角的精度上,也出现了一些成果,既有定性的也有定量的。
国内外对水准仪的i角全部采用平行光管进行检验和校正,仪器设备价格昂贵,一般都是送专门的测绘仪器鉴定部门进行检验和校正,而仪器使用单位如果自己对水准仪的i角进行检验和校正,大都是在室外安置仪器、立尺进行检验和校正,需要人员多、误差较大、作业条件差,利用误差传播定律的定量研究不深入。
尽管这方面工作之前有人进行过研究,诸如DS3、徕卡系列、蔡司系列水准仪i角的研究,但对于天宝DiNi03系列数字水准仪i角误差检校方法与误差分析这方面,前人尚未做出过系统地分析,仍可以在这方面做一些有益的初步探究工作。
TBC使用教程天宝静态处理

直观的图形显示
TBC软件支持多种图形显示方式 ,如轨迹图、散点图、等高线图 等,方便用户进行数据可视化分 析。
灵活的参数设置
用户可以根据需要灵活设置处理 参数,如截止高度角、采样间隔 等,以满足不同应用场景的需求 。
高效的性能表现
TBC软件采用优化的算法和高效 的数据处理引擎,能够在保证处 理精度的同时,提高处理效率。
对分析得到的结果进行 解释和评估,判断其是 否符合预期和精度要求 。如有需要,可对结果 进行进一步优化和调整 。
将处理得到的静态数据 应用于相关领域,如地 理信息系统、工程测量 、环境监测等。确保数 据的有效利用和价值的 最大化。
04
TBC软件静态处理操作指南
数据导入和设置
1 2 3
数据导入
支持多种数据格式导入,如RINEX、SP3等。在 TBC中,选择“文件”->“导入”,选择相应的 数据格式进行导入。
03
4. 通过图形视图查看处理结果,并进行必 要的分析和评估;
04
5. 导出处理结果并保存。
03
静态数据处理原理
静态数据处理基本概念
静态数据
指在时间和空间上相对稳定、不经常变动的数据。在测量领 域,静态数据通常指固定测站进行长时间观测所获取的数据 。
静态数据处理
对静态数据进行采集、整理、分析、解释和应用的过程。在 测量中,静态数据处理的主要目的是提取测站的位置信息和 相关参数,为后续应用提供准确可靠的数据基础。
智能化和自动化
随着人工智能和机器学习技术的发展,TBC软件有望实现 更高程度的智能化和自动化,提高数据处理效率和准确性 。
多源数据融合处理
TBC软件将进一步发展多源数据融合处理技术,能够处理 来自不同传感器和平台的数据,提供更全面的信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
天宝监测解决方案
选择 3
+ 实时 GNSS
ห้องสมุดไป่ตู้
选择 2
+ GNSS 后处理 和 实时光学
选择 1
光学 后处理
基本监测
xls
2010
Trimble 4D Control 选择 1 – Optical PP
外业现场手动采集数据 • 使用外业软件采集数据
→ TSC手簿 → Trimble Access软件 Access
GNSS RTK引擎 引擎
• 使用基于服务器的RTK技术测得基线长度 • 有限的现场分析,快速验证
GNSS 网络运动引擎
• 连续的,长期的解决方案 • 验证其他引擎
2010
Trimble 4D Control
GNSS 以及光学传感器的应用
• 光学全站仪
2010
2010
Trimble 4D Control
真实案例
Åkneset滑坡监测,挪威 滑坡监测, 滑坡监测
2010
真实案例
Nordnes山滑坡监测,挪威 山滑坡监测, 山滑坡监测
2010
谢谢!
2010
Trimble S8 全站仪
Trimble S8 带有 FineLock™精细锁定技术 精细锁定技术
• 角度精度: 0.5” or 1” • 距离精度: 0.8 mm + 1 ppm • FineLock 精度: < 300 米测程为 测程为1毫米 测程为 • 可用型号为 自动锁定和机器人 • MagDrive™ • SurePoint™ • 可选长距 FineLock™ → 精度: <2500米测程为1厘米
xls
2010
基本监测解决方案
使用Trimble Access软件进行基本监测 使用 软件进行基本监测
完成作业四步骤: 1. 连接到仪器 2. 打开/新建任务 3. 测量 4. 分析数据
xls
2010
基本监测解决方案
使用Trimble Access软件进行基本监测 使用 软件进行基本监测
xls
2010
GNSS 以及光学传感器的应用
• 光学全站仪 • GNSS 接收机
2010
2010
Trimble 4D Control
GNSS 以及光学传感器的应用
• 光学全站仪 • GNSS 接收机 • 光学全站仪与GNSS接收机相结合
2010
2010
真实案例
苏黎世中央车站, 苏黎世中央车站,瑞士 • New rail track • New train station • New tunnel
GNSS 后处理引擎
• • • • • • 最精确的坐标 反应时间缓慢 自动基线处理长达2000公里 不同的 (parallel)处理间隔 板块构造 例如参照物控制
2010
Trimble 4D Control
GNSS快速运动引擎 快速运动引擎
• 使用专有算法来探测大于3厘米/秒的突然变化 • 察觉重大的运动变化
• Terrestrial 后处理引擎 • Terrestrial 实时引擎 • GNSS 后处理引擎 • 集成测量引擎 • GNSS RTK 引擎 • GNSS 快速运动引擎 • GNSS 网络运动引擎
2010
Trimble 4D Control
比较各种 GNSS 引擎
2010
Trimble 4D Control
Trimble CU
Trimble TSC2
xls
2010
基本监测解决方案
作业现场手动采集数据 外业软件:
Trimble Survey Controller
Trimble Access
xls
2010
基本监测解决方案
使用 Trimble Access软件进行基本监测作业 软件进行基本监测作业
为Trimble Access软件设计的新监测模块 → 购买或租赁模块!
FineLock™
• 狭窄视场 • 不受周围棱镜干扰 • 最小间隔 ∆: 80 cm at 200 m
Δ
2010
Trimble GNSS 接收机
用于各种监测应用的GNSS接收机 接收机 用于各种监测应用的
• R7 GNSS
– – – – – –
GPS L2C L5 GLONASS 76 信道 CF 卡槽
2010
Trimble S8 全站仪
FineLock™
• 作业频率为 333 Hz • 两秒就能完成一次测量 • 一次测量中完成670次瞄准
FineLock技术在“慢速运动” Manual Aiming! FineLock技术在“慢速运动”中完 技术在 成瞄准! 成瞄准!
2010
Trimble S8 全站仪
2010
天宝监测解决方案
不同作业, 不同作业,不同方案 选择3 选择3
+ RT GNSS
+ GNSS PP 和 RT Optical
选择2 选择2 Trimble 4D Control 选择1 选择1
Optical PP
基本监测 无需内业软件! 无需内业软件 xls
2010
基本监测解决方案
作业现场手动数据采集 外业手簿:
2010
天宝自动监测解决方案
2010
天宝监测解决方案
所有监测应用中的共同要求
信息
+ 时间
趋势
2010
天宝监测解决方案
不同的任务需要不同的传感器 • 光学全站仪
– 高精度定位 – 能够进行多点观测 – 相对较短的距离 <2.5km
• GNSS 传感器
– – – – 长距离 高数据传输率 精确差分定位 仅限于单点
• 使用内业软件分析数据
→ Trimble 4D Control 选择 1 → 对光学原始数据进行后处理
2010
Trimble 4D Control 选择 1 – 光学后处理
• SQL 数据库用于大型工程 • 新建和导出各种图表 • 计算趋势 • 生成报告
2010
天宝监测解决方案
选择 3
实时GNSS + 实时GNSS
Real-time optical monitoring!
2010
真实案例
Phalaborwa 铜矿,南非 铜矿,
2010
真实案例
Tolt 大坝,美国 大坝,
2010
真实案例
蒙特卡罗的超深地基施工, 蒙特卡罗的超深地基施工,摩纳哥
2010
真实案例
El Romeral 铁矿,智利 铁矿,
2010
2010
天宝监测解决方案
选择3 选择3
实时GNSS + 实时GNSS
选择 2
+ GNSS 后处理和 实时光学
选择 1
光学后处理
基本监测
xls
2010
Trimble 4D Control 选择3 – 实时光学和实时GNSS
实时光学数据处理和GNSS数据后处理相结合 数据后处理相结合 实时光学数据处理和
选择 2
+ GNSS 后处理 和 实时光学
选择1 选择1
光学后处理
基本监测
xls
2010
Trimble 4D Control 选择 2 – 实时光学 和 GNSS 后处理
实时光学数据处理和GNSS数据后处理相结合 数据后处理相结合 实时光学数据处理和
• Terrestrial Post-Processing Engine后处理引擎 • Terrestrial Real-Time Engine实时引擎 • GNSS 后处理引擎 • 集成测量引擎