PWM可逆直流调速系统matlab仿真实习
基于MATLAB的直流调压调速控制系统的仿真
三、MATLAB仿真环境搭建
MATLAB提供了Simulink仿真工具,可以方便地进行控制系统的建模和仿真。在搭建直流调压调速控制系统的仿真环境时,首先需要对电机的特性进行建模,包括电机的电动力学方程、电机的转矩-转速特性曲线等。然后,设计控制器的结构和参数,通过Simulink建立相应的控制模型,最后进行仿真验证。MATLAB还提供了丰富的工具箱和函数库,如控制系统工具箱、电机控制工具箱等,能够方便地进行控制系统设计和分析。
2. 控制系统模型
在直流调压调速控制系统中,控制器起着至关重要的作用。常见的控制器包括PID控制器和模糊控制器。这些控制器可以根据电动机的工作状态和需求信号进行控制,实现对电动机速度和输出电压的精准控制。在进行仿真时,需要将控制器的数学模型结合到整个系统中,以实现对电动机的系统级控制。
在MATLAB中进行直流调压调速控制系统的仿真时,可以利用Simulink工具箱进行建模和仿真。Simulink是MATLAB的一个附加工具箱,提供了丰富的模块和功能,可以方便地对控制系统进行仿真和分析。以下是基于MATLAB的直流调压调速控制系统的仿真步骤:
五、实验结果与分析
通过MATLAB的仿真实验,我们可以得到直流调压调速控制系统的性能指标,如电机的转速曲线、电机的输出功率曲线等。根据仿真结果,我们可以对控制系统进行性能分析和优化,调整控制器的参数,改进控制策略,提高系统的稳定性和响应性能。通过仿真实验可以验证控制系统的设计是否满足实际要求,指导工程实践中的系统调试和优化。
直流电机调速matlab仿真报告
直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
PWM脉宽直流调速系统设计及matlab仿真验证
PWM脉宽直流调速系统设计及matlab仿真验证————————————————————————————————作者:————————————————————————————————日期:目录1.MATLAB简介 (3)3系统设计及参数计算 (5)3.1系统总体设计 (5)3.1.1 H型双极式PWM原理 (5)3.1。
2双闭环调速系统结构图 (7)3.1。
3双闭环调速系统启动过程分析 (8)3。
2电流调节器设计及参数计算 (9)3。
3转速调节器设计及参数计算 (11)4 MATLAB仿真验证 (14)4.1稳定运行时电流环突然断线仿真分析 (14)参考文献 (19)PWM脉宽直流调速系统设计及matlab仿真验证1.MATLAB简介MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言的编辑模式,代表了当今国际科学计算软件的先进水平。
[MATLAB和MATHEMATICA、MAPLE并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB也吸收了像MAPLE等软件的优点,使MATLAB成为一个强大的数学软件。
2 设计分析直流双闭环调速系统调节器包括转速调节器(ASR)和电流调节器(ACR),从而分别引入了转速负反馈和电流负反馈以调节转速和电流,二者之间实行串级连接.把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真本文将介绍基于MATLAB的直流调压调速控制系统的仿真实验。
直流调压调速系统是一种常见的电力控制系统,广泛应用于工业生产和家用电器中。
该系统通过对电机供电电压和电流的控制,可以实现电机的转速、转矩等特性的调整。
本文主要涉及直流电机的调速控制,介绍PID控制算法在直流调速系统中的应用,并通过MATLAB仿真实验验证控制系统的性能。
直流调速控制系统由电机、电源、测量元件、控制器和执行元件等组成。
其中,电源提供电机运行所需的电源,测量元件用于实时测量电机运行状态,控制器根据测量结果和设定值进行控制,执行元件则根据控制信号驱动电机转速和转矩。
在直流调速控制系统中,PID控制器是最常用的一种控制算法,其主要通过比较设定值和实际值之间的误差,进行控制输出,从而调整电机的运行状态。
MATLAB软件是一种用于科学计算、数据可视化和算法开发的高级语言和交互式环境。
在直流调速控制系统仿真实验中,MATLAB提供了丰富的工具箱和函数库,可用于模拟电机运行状态、控制器设计和仿真实验模拟等方面。
接着,需要设计PID控制器参数。
PID控制器的参数包括比例系数Kp、积分系数Ki和微分系数Kd。
这些参数的设置对控制器的性能有重要影响,需要根据具体的需求进行调整。
在实验中,采用试控法设计PID控制器,即根据试验结果逐步调整控制器参数,使得系统的运行状态达到最佳效果。
最后,进行控制系统仿真实验。
在仿真实验中,需要设置适当的工作条件和控制器参数,观察电机的运行状态和控制器输出,评估控制系统的性能。
实验结果表明,PID控制器可以实现电机的精确调速和稳定控制,在实际应用中有较广泛的应用前景。
综上所述,基于MATLAB的直流调压调速控制系统的仿真实验可以有效地模拟电机运行状态、控制器设计和控制系统的性能评估。
通过该实验可以更深入地了解直流调速控制系统的工作原理和控制算法,并为实际应用提供有益的参考。
直流PWM调速系统MATLAB仿真

《单片机原理及接口技术》课程设计报告课题名称直流PWM调速系统的MATLAB仿真学院自动控制与机械工程学院专业机械设计制造及自动化班级姓名(学号)时间2016-1-9摘要直流电机具有良好的启动性能和调速特性,它的特点是启动转矩大,能在宽广的范围内平滑、经济地调速,转速控制容易,调速后效率很高。
本文设计的直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED液晶显示器、霍尔测速电路以及独立按键组成的电子产品。
电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。
通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。
电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。
关键词:直流电机调速;H桥驱动电路;LED显示器;51单片机ABSTRACTDC motor has a good startup performance and speed characteristics, it is characterized by starting torque, maximum torque, in a wide range of smooth, economical speed, speed, easy control, speed control after the high efficiency. This design of DC motor speed control system, mainly by the microcontroller 51, power supply, H-bridge driver circuits, LED liquid crystal display, the Hall velocity and independent key component circuits of electronic products. Power supply with 78 series chip +5 V, +15 V for motor speed control using PWM wave mode, PWM is a pulse width modulation, duty cycle by changing the MCU 51. Achieved through independent buttons start and stop the motor, speed control, turning the manual control, LED realize the measurement data (speed) of the display. Motor speed using Hall sensor output square wave, by 51 seconds to 1 microcontroller square wave pulses are counted to calculate the speed of the motor to achieve a DC motor feedback control.Keywords: DC motor speed control;H bridge driver circuit;LED display目录第1章引言1.1 概况现代工业的电力拖动一般都要求局部或全部的自动化,因此必然要与各种控制元件组成的自动控制系统联系起来,而电力拖动则可视为自动化电力拖动系统的简称。
基于PWM控制的直流电动机调速系统设计及MATLAB仿真

┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊摘要在电力拖动系统中,调节电压的直流调速是应用最广泛的一种调速方法,除了利用晶闸管整流器获得可调直流电压外,还可利用其它电力电子元件的可控性,采用脉宽调制技术,直接将恒定的直流电压调制成极性可变,大小可调的直流电压,用以实现直流电动机电枢两端电压的平滑调节,构成直流脉宽调速系统,随着电力电子器件的迅速发展,采用门极可关断晶体管GTO、全控电力晶体管GTR、P-MOSFET、绝缘栅晶体管IGBT等一些大功率全控型器件组成的晶体管脉冲调宽型开关放大器(Pulse Width Modulated),已逐步发展成熟,用途越来越广。
本文主要讨论了直流调速系统的基本概念,在此基础上系统地介绍了转速负反馈单闭环调速系统,转速电流负反馈双闭环调速系统的组成,工作原理,脉宽调速系统的原理和控制方法,介绍了直流脉宽调速系统的控制电路和系统构成。
最后应用MATLAB的Simulink,采用面向电气原理结构图的仿真技术,对直流脉宽调速系统进行了仿真分析。
关键词:调速,PWM控制,直流电动机,仿真┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录第一章引言1.1 直流调速系统简介 (5)1.2 PWM直流调速的研究背景和发展状况 (5)1.3 本设计的主要内容 (6)第二章直流电机调速系统2.1 直流电机调速系统的概述 (7)2.1.1 旋转变流机组直流电机调速系统 (7)2.1.2 静止式可控整流器调速系统 (7)2.1.3 直流斩波器或脉宽调速 (8)2.2 电机基本调速方法 (9)2.2.1 电枢串电阻调速 (9)2.2.2 弱磁调速 (9)2.2.3 调压调速 (10)2.3 转速控制的要求和调速指标 (10)2.4 闭环直流调速系统 (11)2.4.1单闭环直流调速系统 (11)2.4.2 转速电流双闭环调速系统 (14)2.4.2.1 双闭环系统的稳态结构图和静特性 (16)2.4.2.2 各变量的稳态工作点和稳态参数计算 (17)2.4.2.3 双闭环直流调速系统的启动过程分析 (18)2.4.2.4 转速和电流两个调节器的作用 (20)第三章PWM调制技术与PWM变换器3.1 PWM调制技术 (21)3.1.1 模拟式PWM控制 (21)3.1.2 数字式PWM控制 (22)3.2 PWM变换器 (23)3.2.1 简单的不可逆PWM变换器 (23)3.2.2 制动不可逆PWM变换器 (24)3.2.3 H型双极式PWM变换器 (26)第四章PWM直流电动机调速系统的设计4.1 PWM-M直流调速系统的控制电路 (28)4.2 系统设计方案的选择 (29)4.2.1主电路供电方案选择 (29)4.2.2主电路形式的选择 (30)4.2.3控制电路方案的选择 (32)4.3 直流脉宽调速系统的MATLAB仿真 (33)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊4.3.1 引言 (33)4.3.2双闭环控制的脉宽调速系统的仿真模型 (33)4.3.3 系统的仿真、仿真结果的输出及结果分析 (36)总结 (39)参考文献 (40)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第一章引言1.1 直流调速系统简介调速系统包括直流调速系统和交流调速系统两大类。
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证双闭环可逆直流脉宽调制(PWM)调速系统是一种常见的电机调速控制方案。
该系统通过两个闭环来实现电机的速度控制和电流控制,从而实现精准的调速效果。
本文将介绍双闭环可逆直流脉宽PWM调速系统的设计原理,并使用MATLAB进行仿真验证。
设计原理:该系统由以下几个主要部分组成:1.输入信号:输入信号一般是一个速度设定值,表示期望电机的转速。
该信号可以通过人机界面或其他控制系统输入。
2.速度控制环:速度控制环根据输入信号和反馈信号之间的差异来控制电机的转速。
常见的速度控制算法有比例控制、积分控制和微分控制。
3.脉宽调制器:脉宽调制器根据速度控制环输出的控制信号来生成PWM信号,控制电机的转速。
通常使用的脉宽调制算法有定时器计数法和比较器法。
4.电流控制环:电流控制环根据PWM信号和反馈信号之间的差异来控制电机的电流。
常见的电流控制算法有比例控制、积分控制和微分控制。
5.电机驱动器:电机驱动器将电流控制环输出的控制信号转换为电机驱动信号,驱动电机正常运转。
MATLAB仿真验证:为了验证双闭环可逆直流脉宽PWM调速系统的性能,可以使用MATLAB进行仿真。
以下是一种基本的MATLAB仿真流程:1.定义电机模型:根据电机的参数和特性,定义一个数学模型来表示电机的动态响应,例如通过电机的转矩-转速曲线或电机的方程。
2.设计速度控制器:根据系统要求和电机模型,设计一个适当的速度控制器。
可以使用PID控制器或其他控制算法。
3.设计PWM调制器:根据速度控制器输出的控制信号,设计一个PWM调制器来生成PWM信号。
根据电机模型和控制要求,选择合适的PWM调制算法。
4.设计电流控制器:根据PWM信号和电机模型,设计一个电流控制器。
可以使用PID控制器或其他控制算法。
5. 仿真验证:将以上设计参数输入到MATLAB仿真模型中,并进行仿真验证。
可以使用Simulink工具箱来搭建仿真模型,并通过逐步增加负载或改变速度设定值等方式来验证系统的性能。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真1. 引言1.1 研究背景直流调压调速系统作为电力电子领域中的重要研究方向,其控制技术的研究一直备受关注。
随着工业自动化的发展和能源需求的增加,直流调压调速系统在工业控制和电力传输中发挥着重要作用。
传统的直流调压调速系统在控制精度、响应速度和稳定性方面存在一定的不足,因此需要不断改进和优化。
在这样的背景下,基于MATLAB的直流调压调速控制系统的仿真研究变得尤为重要。
利用MATLAB这一强大的工具,研究人员可以对系统进行建模、设计控制器、分析系统稳定性并进行仿真验证,从而实现对系统性能的优化和提升。
本文旨在通过对直流调压调速控制系统的建模、PID控制器设计与仿真、系统稳定性分析、参数优化与性能评价以及系统仿真结果分析等方面进行研究,进一步探讨如何通过MATLAB工具来实现直流调压调速系统的优化和控制。
希望通过本文的研究,能够为直流调压调速系统的控制技术研究提供一定的参考和借鉴,促进该领域的发展与进步。
1.2 研究目的直流调压调速控制系统是电气工程中常见的控制系统,在工业生产和实验研究中有着广泛的应用。
研究的目的在于通过MATLAB进行仿真,探究系统的建模、PID控制器设计、系统稳定性分析、参数优化以及性能评价等方面的问题。
通过深入研究直流调压调速控制系统的各种特性及其影响因素,可以更好地理解控制系统的工作原理和性能特点,为实际工程应用提供指导。
通过仿真实验,可以降低实验成本、提高实验效率,并能够在设计过程中进行多次调试和优化,从而得到更加理想的控制效果。
研究直流调压调速控制系统的仿真具有重要的现实意义和理论价值。
通过本研究的深入探讨,不仅可以加深对控制系统理论的理解,还可以为工程实践提供有益的借鉴和指导。
1.3 研究意义直流调压调速控制系统作为工业控制领域中的重要组成部分,其研究具有重要的理论价值和实际应用意义。
首先,在工业生产中,直流调压调速控制系统广泛应用于电动机、风电变流器、UPS电源等设备中,能够实现对电压和速度的精确控制,提高设备的运行效率和稳定性。
基于Matlab/SIMULINK的桥式直流PWM变换电路实验仿真分析
基于Matlab/SIMULINK的桥式直流PWM变换电路实验仿真分析本文以MATLAB软件的SIMULINK仿真软件包为平台,对桥式直流PWM 变换电路进行仿真分析文章对每个电路首先进行原理分析,进而建立相应的仿真模型,经过详细计算确定并设置仿真参数进行仿真,对于每次仿真结果均采用可视化波形图的方式直接输出。
在对仿真结果分析的基础上,不断优化仿真参数,使其最大化再现实际物理过程,并根据各个电路的性能进行参数改变从而观察结果的异同。
标签:SIMULINK;PWM;电路仿真1 桥式直流PWM变换电路简介桥式直流PWM变流器仿真实验是对全控型器件的应用。
实验电路中,前端为不可控整流、后端为开关型逆变器,此结构形式应用最为广泛。
逆变器的控制采用PWM方式。
对这个实验有所掌握的话,对后续课程设计直流调速系统也会有很大启发。
因为直流PWM-M调速系统近年来发展很快,直流PWM-M调速系统采用全控型电力电子器件,调制频率高,与晶闸管直流调速系统相比动态响应速度快,电动机转矩平稳脉动小,有很大优越性,因此在小功率调速系统和伺服系统中的应用越来越广泛。
2 桥式直流PWM变换电路的工作原理本实验系统的主电路采用双极性PWM控制方式,其中主电路由四个MOSFET(VT1~VT4)构成H桥。
Ub1~Ub4分别由PWM调制电路产生后经过驱动电路放大,再送到MOSFET相应的栅极,用以控制MOSFET的通断。
在双极性的控制方式中,VT1和VT4的栅极由一路信号驱动,VT2和VT3的栅极由另一路信号驱动,它们成对导通。
控制开关器件的通断时间可以调节输出电压的大小,若VT1和VT4的导通时间大于VT2和VT3的导通时问,输出电压的平均值为正,VT2和VT3的导通时间大于VT1和VT4的导通时间,则输出电压的平均值为负,所以可以用于直流电动机的可逆运行。
3 计算机仿真实验(1)桥式直流PWM变换电路仿真模型的建立。
根据所要仿真的电路,在SIMULINK窗口的仿真平台上构建仿真模型。
直流调速系统的MATLAB仿真(报告)
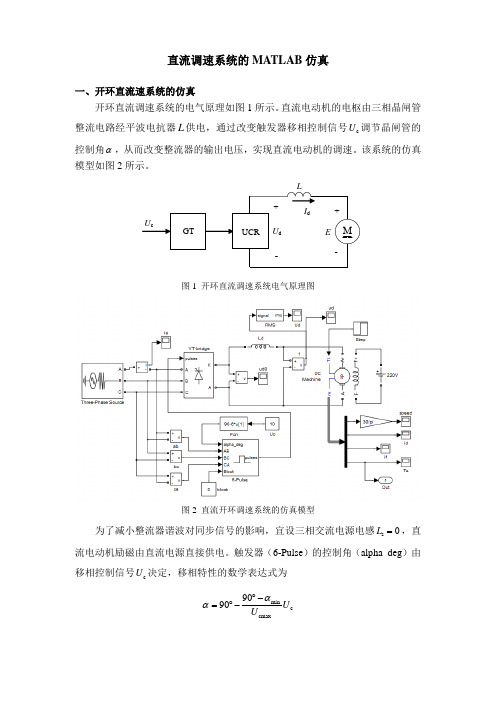
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅ T e 60600.132 1.262π2πK K ==⨯≈T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
matlab直流电动机调速系统仿真实训心得
一、概述在现代工业生产中,直流电动机广泛应用于各种设备和机械中,其调速控制系统的稳定性和性能直接影响到整个生产线的效率和质量。
为了提高学生的实践操作能力和掌握直流电动机调速系统的原理和方法,我校开设了相关的仿真实训课程。
在本次实训中,我主要使用Matlab 软件,进行了直流电动机调速系统的仿真实验,获得了丰富的经验和收获,现将心得体会整理如下。
二、理论基础1. 直流电动机调速原理直流电动机调速系统是通过调节电动机的电流或电压来实现转速的调节。
常用的调速方法包括电阻调速、调速励磁和PWM调速等。
2. Matlab在仿真中的应用Matlab是一种功能强大的科学计算软件,广泛用于工程技术领域。
其仿真环境和信号处理工具箱可以方便地进行电机控制系统的建模和仿真。
三、实训内容与步骤1. 系统建模我根据直流电动机的特性和调速原理,进行了系统的建模工作。
通过Matlab的Simulink工具,搭建了直流电动机的数学模型,包括电动机的等效电路、控制系统和负载模型等。
2. 参数设置与仿真在建立完毕电机系统模型后,我对电机的各项参数进行了设置,包括额定转速、额定电流、负载惯量等。
利用Matlab进行了系统的仿真实验,观察了不同调速方法对电机性能的影响。
3. 实验结果分析通过对仿真实验数据的分析,我发现了不同调速方法的优缺点,比较了电机在不同负载和控制参数下的性能表现,提出了一些改进和优化控制策略的建议。
四、心得体会与经验总结1. 对仿真实验的认识通过本次实训,我深刻体会到仿真实验的重要性。
在实际工程中,通过仿真可以事先评估系统设计的合理性,降低试错成本,提高工程质量。
2. 对Matlab的认识与应用Matlab作为工程领域的标准软件之一,其强大的建模和仿真能力为工程师提供了便利。
在实训中,我更加熟练地掌握了Matlab的使用技巧,对其在电机控制系统仿真中的应用有了更深刻的理解。
3. 对直流电动机调速系统的认识通过本次实训,我对直流电动机调速系统的原理和方法有了更加深入的了解,认识到了控制系统设计和参数调节对电机性能的影响,为今后的工程实践打下了坚实的基础。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真直流调压调速控制系统是工业自动化领域中常见的一种控制系统,它可以实现对直流电机的电压和速度进行精确的控制。
本文基于MATLAB软件对直流调压调速控制系统进行了仿真,主要包括建立电路模型、设计控制器、进行系统仿真等步骤。
通过仿真分析,可以验证控制系统的性能和稳定性,为实际工程应用提供参考。
一、直流电机数学模型直流电机是直流调压调速控制系统的执行元件,其数学模型可以基于电路和机械原理进行建模。
直流电机的数学模型主要包括电动势方程和机械方程,可以用下面的公式表示:1)电动势方程:\[E_a = K_e \omega\]\(E_a\)是电机的电动势,\(K_e\)是电机的电机常数,\(\omega\)是电机的角速度。
综合考虑电动势方程和机械方程,可以得到直流电机的传递函数:\[G(s) = \frac{k}{(s+a)(s+b)}\]\(k\)是传递函数的增益,\(a\)和\(b\)是传递函数的两个极点。
二、控制器设计在直流调压调速控制系统中,通常采用PID控制器来实现对电压和速度的精确控制。
PID控制器的传递函数可以表示为:\[C(s) = K_p + K_i \frac{1}{s} + K_d s\]\(K_p\)、\(K_i\)和\(K_d\)分别是比例环节、积分环节和微分环节的增益。
为了实现对电压和速度的精确控制,可以设计两个PID控制器,分别用于电压环和速度环。
电压环的PID控制器可以根据电机的电动势方程进行设计,速度环的PID控制器可以根据电机的机械方程进行设计。
三、系统仿真基于MATLAB软件,可以建立直流调压调速控制系统的仿真模型,对系统进行模拟和分析。
需要建立直流电机的数学模型,包括电动势方程和机械方程,并将其转化为传递函数形式。
然后,设计电压环和速度环的PID控制器,确定各个环节的增益参数。
将电机模型和控制器模型进行组合,得到整个系统的开环传递函数。
数字化PWM可逆直流调速系统MATLAB仿真
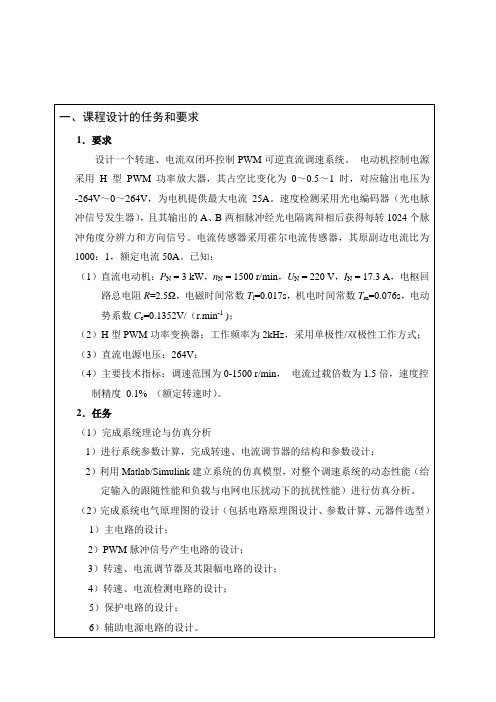
1.要求
设计一个转速、电流双闭环控制PWM可逆直流调速系统。电动机控制电源采用H型PWM功率放大器,其占空比变化为0~0.5~1时,对应输出电压为-264V~0~264V,为电机提供最大电流25A。速度检测采用光电编码器(光电脉冲信号发生器),且其输出的A、B两相脉冲经光电隔离辩相后获得每转1024个脉冲角度分辨力和方向信号。电流传感器采用霍尔电流传感器,其原副边电流比为1000:1,额定电流50A。已知:
Keywords:DCTimingSystem; PWM;Double CloseLoop; PI Adjust
六、成绩评定
指导教师评语:
指导教师签字:
2012年月日
项目
评价
项目
评价
调查论证
工作量、工作态度
实践能力
分析、解决问题能力
质量
创新
得分
七、答辩记录
答辩意见及答辩成绩:
答辩小组教师(签字):
2012年月日
5.肖阳.基于DSP的伺服电机的调速系统的控制设计[D].武汉:武汉理工大学硕士论文,2009.
6.洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真.北京:机械工业出版社,2006.
四、课程设计(学年论文)摘要(中文)
本文介绍双闭环PWM直流调速系统原理基础上,根据系统的动、静态性能指标采用工程设计方法设计调节器参数。调速方案的优劣直接关系到系统调速的质量,根据电机的型号及参数选择最优方案,以确保系统能够正常,稳定地运行。并运用MATLAB的Simulink和Power System工具箱、面向系统电气原理结构图的仿真方法,实现了转速电流双闭环PWM直流调速系统的建模与仿真。文章重点介绍了调速系统的建模和PWM发生器、直流电机模块互感等参数的设置。给出了PWM直流可逆调速系统的仿真模型和仿真结果,验证了仿真模型及调节器参数设置的正确性。
Matlab直流调速系统仿真

MATLAB仿真技术大作业实验报告题目:直流调速系统仿真永磁直流电机参数如下:电枢电阻0.2Ω,电枢电感2.4mH,电动势系数0.1V/rpm,转动惯量0.43kg•m2。
仿真中其余电机参数设置为0。
电机负载情况如下:0~1s,电机空载,即负载转矩TL为0;1s~2s,电机满载运行,负载转矩TL为145N•m。
该电机由降压变换器供电。
斩波器使用两个IGBT及其反并联二极管构成单相桥臂,两个IGBT的驱动信号互补,如下图所示。
开关频率2.5kHz,输入电压600V,通过改变IGBT 导通占空比而改变电机端电压(即PWM方式工作)。
仿真使用ode23t求解器。
1、电机开环特性通过斩波器给电机供电,电机端电压平均值420V,计算PWM脉冲占空比。
画出转速的波形,画出电机电枢电流的波形。
记录电机起动时的最大电流,记录负载时的稳态电枢电流。
根据仿真结果求出空载和负载时的转速。
(注意电机模型m端口输出的转速单位是rad/s,请将其转为以rpm为单位的波形。
)解:1)斩波器的占空比为V o/Vd,也就是2)以下为转速波形以及电枢电流波形图(经过单位换算,单位为rpm);3)记录电机起动时的最大电流,记录负载时的稳态电枢电流。
由图可知:电机起动时的最大电流为1452A,负载时的稳态电枢电流为153A。
4)根据仿真结果求出空载和负载时的转速。
空载时转速:4200rpm 负载时转速:345.149rad/s = 3900rpm。
2、转速闭环控制为了改善电机调速性能,对该直流电机系统加入转速闭环控制。
转速控制器使用比例-积分控制器,转速指令为4200rpm,控制器输出量为斩波器的调制波(即占空比)。
调节控制器的比例和积分环节参数以实现较好的动、静态性能。
画出转速的波形,画出电机电枢电流的波形。
记录电机起动时的最大电流,记录负载时的稳态电枢电流。
选取P = 1,I = 7.5 得到如图所示图形,可得转速波形以及电枢电流波形如下图所示记录下电机起动时的最大电流I = 2388.372A ,负载时的稳态电枢电流I = 160.435A 。
直流电机调速matlab仿真报告

直流电机调速仿真报告1. 背景直流电机是一种常见的电动机类型,广泛应用于工业生产和家庭设备中。
在实际应用中,为了满足不同工况下的需求,需要对直流电机进行调速控制。
调速控制可以实现电机转速的精确控制,提高系统的稳定性和效率。
本报告旨在通过Matlab仿真分析直流电机调速控制系统,在理论与实践结合的基础上,提出相应的建议。
2. 分析2.1 直流电机调速原理直流电机调速原理主要基于改变电源的电压或者改变外加负载来实现对电机转速的控制。
常见的直流电机调速方法有:•电压调制法:通过改变直流电源的输出电压来改变转矩和转速;•变阻器分压法:通过改变外接阻值来改变转矩和转速;•变极数法:通过改变励磁回路中串联或并联的励磁线圈数目来改变转矩和转速;•PWM调制法:通过脉冲宽度调制技术来控制输入给定功率。
2.2 直流电机调速控制系统直流电机调速控制系统由电源、电机、传感器、控制器和负载组成。
其中,传感器用于测量电机的转速和位置,控制器根据测量值计算出合适的控制信号,通过电源提供给电机。
负载则影响电机的转速和转矩。
常见的直流电机调速控制方法有:•比例积分(PI)控制:根据误差信号进行比例和积分运算,生成合适的输出信号;•模糊控制:基于模糊推理原理,根据输入变量和规则库生成输出信号;•自适应控制:根据系统动态特性自动调整参数以实现最优性能。
2.3 仿真建模与参数设置本次仿真采用Matlab/Simulink软件进行建模与仿真。
首先需要确定直流电机的基本参数,如额定功率、额定转速、额定电压等。
然后根据实际情况设置仿真模型中的参数。
本次仿真设置了一个基于PWM调制法的直流电机调速系统模型。
具体参数如下:•额定功率:100W•额定转速:1500rpm•额定电压:220V•PWM调制频率:1kHz•控制器采样周期:0.01s3. 结果与分析3.1 仿真结果展示在进行仿真之后,我们得到了直流电机调速系统的仿真结果。
以下是部分结果的展示:•转速曲线图:•转矩曲线图:3.2 结果分析根据仿真结果,可以对直流电机调速系统进行分析。
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证_课程设计 推荐

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证专业:电力传动学号:201020305139姓名:杨耀指导老师:王笑宇目录目录 (1)中英文摘要 (2)摘要 (2)Abstract (2)正文 (3)双闭环可逆直流脉宽PWM调速系统设计 (3)设计分析 (3)主电路设计 (8)电流调节器参数计算 (9)信号产生电路 (11)GTR驱动电路原理 (12)辅助回路设计 (13)转速给定电路设计 (13)转速检测设计 (14)MATLAB仿真设计 (15)双闭环调速系统仿真框图 (15)仿真结果 (15)结果分析 (19)总结 (20)参考文献 (21)中英文摘要摘要直流电机由于具有速度控制容易,启、制动性能良好,且在宽范围内平滑调速等特点而在冶金、机械制造、轻工业等工业部门中得到广泛应用。
直流时机转速的控制方法可以分为两类,即励磁控制法与电枢电压控制法。
本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。
长期以来,直流电动机因其具有调节转速比较灵活、方法简单等特点,一直在传动领域占有统治地位。
本文对双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调整系统原理出发,逐步建立了闭环直流PWM调整系统的模型。
AbstractWith dc motor speed control is easy, rev, braking performance is good, smooth and in wide range speed adjustment characteristics in metallurgy, machinery manufacturing, light industry, etc. Is widely used in the industrial sector. The rotational speed of dc timing control method can be divided into two categories, namely excitation control method with the armature voltage control method. This paper mainly studies the dc speed regulation system, it mainly consists of three parts, including parts, power control, direct current motor. For a long time, the dc motor because of its adjustment speed is more flexible, simple method and so on, have been occupied dominant position in the field of transmission.In this paper, the double closed-loop irreversible dc PWM speed regulating system, a further study from the principle of dc adjusting system, gradually establish a closed-loop dc PWM adjustment model of the system.正文双闭环可逆直流脉宽PWM调速系统设计设计分析双闭环调整系统的传动系统结构图直流PWM控制系统是直流脉宽调制式调速控制系统的简称,与晶闸管直流调速系统的区别在于用直流PWM变换器取代了晶闸管变流装置,作为系统的功率驱动器,系统构成原理图如下所示:直流PWM传动系统结构图其中属于脉宽调制调速系统主要由调制波发生器GM、脉宽调制器UPM、逻辑延时环节DLD和电力晶体管基极的驱动器GD和脉宽调制(PWM)变换器组成。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真直流调压调速系统是一种常见的电气控制系统,广泛应用于工业领域中。
在直流调压调速系统中,直流电机作为执行器,通过对电机的电压进行调节,可以实现对电机的速度、扭矩等参数的控制。
本文基于MATLAB平台对直流调压调速系统进行了仿真分析,包括建立系统模型、设计控制系统、进行性能分析等方面。
一、直流调压调速系统模型的建立直流调压调速系统可以简化为如下模型:e(t)--->u(t)--->Gv(s)---->X(s)----->e(t)是输入信号,表示期望电机速度;u(t)是输出信号,表示电机输出的转矩;Gv(s)是电机的传递函数,表示电机的速度与输入电压的关系;X(s)是控制系统的输出信号,表示根据输入信号e(t)和反馈信号u(t)计算得出的输出。
电机的传递函数Gv(s)可以通过实验测定或者理论计算得到,其具体形式为:Gv(s) = K / (Js+b)K是电机的增益;J是电机的惯性矩;b是电机的摩擦系数。
二、直流调压调速系统的控制器设计对于直流调压调速系统,可以采用比例-积分-微分(PID)控制器来控制电机的速度。
PID控制器的输出计算式为:u(t) = Kp * e(t) + Ki * ∫e(t) * dt + Kd * de(t)/dtKp、Ki、Kd分别是比例、积分、微分控制器的参数,e(t)是输入信号与输出信号之差,de(t)/dt是e(t)的导数。
在MATLAB中,可以使用pid函数设计PID控制器,并使用feedback函数将控制器与直流调压调速系统进行连接。
具体步骤如下:1. 建立直流调压调速系统的模型;2. 调用pid函数,设计PID控制器,并设置控制器的参数;3. 调用feedback函数,将控制器与直流调压调速系统进行连接;4. 设计输入信号e(t);5. 运行模拟程序,观察系统的输出信号u(t)。
三、直流调压调速系统的性能分析在直流调压调速系统的仿真中,可以通过观察系统的输出信号u(t)来评估系统的性能。
基于Matlab的直流电机PWM调速仿真
%限流电阻
% 电源电压
%转速状态方程 %通过PWM器件调制后的输出电压
%电流状态方程
6
五、matlab仿真结果
分析:在以上参数选取的条件下 ①电流i=3.5A(此时电机启动尖峰电流为18A,持续时 间小于2s因此电机启动是安全的) ②转速为23.5r/s=1410r/min(转速也在额定转速内)
谢谢大家
i R
i
n
2
di =(-R ii + k Rn - u) / L (3) dt dn =(k ii - k nn2 ) / J dt (4)
图一、系统简化电路图
(3)(4)即为电路系统微分方程表达式,由于(4) 为非线性的,所以,不能写成状态方程形式。
2
二、电路系统参数设置
① ② ③ ④ ⑤ 电源电压u设为:U0=30V 额定转速n设为: Nm=1500转/分=25转/秒 回路参数设为: L=0.065H; Ri=0.72Ω; 转动惯量设为: J=0.36 PD参数设为: kr=1.0; ki=0.5;kn=0.0027; kp=0.05;kd=0.33;
图一、系统简化电路图
3
三、电路系统原理分析
仿真时PD参数的选取是难点,其对系统的影响至关 重要。在选择PD参数时应综合考虑kp、ki、kd 的 变化给系统带来的影响,具体可以按照先比例后积 分再微分的顺序反复调试参数。
电网电源 速度指令 速度 U* n 调节器 + ASR Un * Ui + Ui La 电流 Uc 调节器 ACR 电流内环 电力开关 变流装置 UPE 电流反馈 速度反馈 U d Id Ra M
5
四、matlab仿真程序
f%子函数定义 unction [dx]=F(x,Nm) L=0.065; J=0.36; R=0.72; kr=1.0; ki=0.5; kn=0.0027; U0=30; i=x(1); n=x(2); kp=0.05; kd=0.33; dn=(ki*i-kn*n^2)/J; du=kd*(kp*(Nm-n)-dn); P=du; di=(-R*i-kr*n+P)/L; dx(1)=di; dx(2)=dn; if(P>U0) P=U0; end if(P<U0) P=0;直流调速系统的一般结构
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《运动控制系统仿真》课程设计
——PWM直流调速系统的动态建模与仿真
学院:电气与控制工程学院
班级:自动化1104班
姓名:***
学号:**********
日期: 2014年6月27日
一、课程设计的目的及任务
《运动控制系统》是自动化专业的一门主干专业课程,在该课程学习结束后单独安排了1周的控制系统仿真课程设计。
其目的是要求学生针对某个电机控制系统功能模块或整个控制系统进行设计与实现,使学生能进一步加深对课堂教学内容的理解,了解典型的电机控制系统基本控制原理和结构,掌握基本的调试方法,提高综合应用知识的能力、分析解决问题的能力和工程实践能力,并初步培养实事求是的工作作风和撰写科研总结报告的能力。
二、课程设计的基本要求
《运动控制系统》被控对象是交、直流电动机,能量转换是由电力电子器件构成的变换器,微机构成控制器。
因此控制系统仿真课程设计学生应掌握以下基本内容:
(1)交、直流电动机;
(2)电力电子变换器;
(3)微机控制器;
(4)转速、电流等检测电路;
(5)输入输出转换电路、调理电路和功放电路等。
三.课程设计的内容及基本要求
1.设计题目
1) 开环直流调速系统的动态建模与仿真
2) 单闭环有静差转速负反馈调速系统的动态建模与仿真
3) 单闭环无静差转速负反馈调速系统的动态建模与仿真
4) 带电流截止转速负反馈的单闭环调速系统的动态建模与仿真
5) 单闭环电压负反馈调速系统的动态建模与仿真
6) 双闭环直流调速系统的动态建模与仿真
α=有环流可逆直流调速系统的动态建模与仿真
7) β
8) 逻辑无环流可逆直流调速系统的动态建模与仿真
9)三相异步电动机数学模型的建立
10) PWM直流调速系统的动态建模与仿真
本文所选题目为:10) PWM直流调速系统的动态建模与仿真。
2.设计内容
(1)设计系统各单元电路和主控电路;
(2)分析并测定系统各环节的输入输出特性及其参数,调试各单元电路;
(3)系统性能分析与程序设计;
(4)系统校正,修正系统静、动态性能。
3.设计要求
(1)初步掌握控制系统的分析和设计的基本方法。
包括设计任务,进行设计题目的方案论证。
通过调查研究、设计计算,确定方案,写出总结报告。
(2)培养一定的自学能力和独立分析问题、解决问题的能力。
包括学会自己分析解决问题的方法,对设计中遇到的问题,能通过独立思考、查阅工具书、参考文献,寻找答案。
(3)通过严格的科学训练和工程设计实践,逐步树立严肃认真、一丝不苟、实事求是的科学作风,并培养学生在实际工作中应具有的生产观点,经济观点和全局观点。
4. 控制对象参数
直流调速系统的基本数据如下:晶闸管三相桥式全控整流电路供电的双闭环直流调速系统,直流电动机:220V,136A,1460r/min,电枢电阻Ra=0.2Ω,允许过载倍数λ=1.5;电枢回路总电阻:R=0.5Ω,电枢回路总电感:L= 15mH,电动机轴上的总飞轮力矩:GD2= 22.5N ·m2,晶闸管装置:放大系数Ks=40,电流反馈系数:β=0.05V/A,转速反馈系数:α=0.007Vmin/r,滤波时间常数:Toi=0.002s ,Ton=0.01s 。
四.PWM 直流调速系统简介
1.PWM 调速原理
可逆PWM 变换器主电路有多种形式,最常用的是桥式(亦称H 形)电路,
如图1所示,电动机M 两端电压AB U 的极性随全控型电力电子器件的开关状态
而改变。
双极式控制可逆PWM 变换器的四个驱动电压的关系是:1423g g g g U U U U ==-=-。
在一个开关周期内,当0≤t<on t 时,AB S U U =,电枢
电流id 沿回路1流通;当on t ≤t<T 时,驱动电压反号,id 沿回路2经二极管续
流,AB S U U =-。
因此,AB U 在一个周期内具有正负相间的脉冲波形,这是双极式名
称的由来。
图1.双极式控制可逆PWM 变换器
2 PWM 发生器的matlab 建模
直流脉宽调速系统仿真的关键是PWM 发生器的建模。
从双闭环调速系统的动态结构框图可知, 电流调节器ACR 输出最大限幅时,H 桥的占空比为1。
对于PWM 发生器, 采用两个Discrete PWM Generator 模块。
由于此模块中自带三角波,其幅值为1,且输入信号应在-1 与1 之间,将输入信号同三角波信号相比较, 当比较结果大于0时, 占空比大于50 %,PWM 波表现为上宽下窄,电机正转;当比较结果小于0 而大于-1 时,占空比小于50 %,PWM 波表现为上窄下宽, 电机反转。
Discrete PWM Generator 模块的参数设置为:调制波为外设,载波频率根据电力电子开关频率确定。
其次,由于电机运转时,H 桥应与对角两管触发信号一致,为此采用Selector 模块(路径为:Simulink/Signal Routing/Selector ),其参数设置为:Input Type 为Vector ,Elements 为[1 2 4 3], 使得PWM 发生器信号同H 桥对角两管触发信号相对应。
PWM 发生器模型及封装后子系统如图2所示:
图2.PWM 发生器模型及封装后子系统
由于ACR 输出的数值在-10~10 之间,为使ACR 输出的数值同PWM 发生器输入信号相对应,在ASR 输出端加了一个Gain 模块,参数为0.1。
这样,当ASR 输出限幅10 时,PWM 输入端为1,占空比为1;当ASR 输出限幅为-10 时,PWM 输入端为-1,占空比为0。
五.Matlab仿真设计
1.开环PWM可逆直流调速系统仿真模型
1.1 开环PWM可逆直流调速系统仿真模型如图3所示。
图3.开环PWM可逆直流调速系统仿真模型
1.2开环PWM可逆直流调速系统仿真结果
(1)当给定值为5时,PWM发生器波形、桥式电路输出电压波形、以及直流电机转速、电枢电流、励磁电流和电磁转矩波形分别如下:
图4.PWM发生器波形
图5.桥式电路输出电压波形
图6.直流电机转速、电枢电流、励磁电流和电磁转矩波形(2)当给定值为0时,PWM发生器波形、桥式电路输出电压波形、以及直流电机转速、电枢电流、励磁电流和电磁转矩波形分别如下:
图7.PWM发生器波形
图8.桥式电路输出电压波形
图9.直流电机转速、电枢电流、励磁电流和电磁转矩波形
1.3 仿真结果分析
PWM发生器产生脉冲宽度可调、频率一定的方波。
其中波1、4相同,2、3相同,切两种波形互补,从而驱动H桥式可逆PWM电路。
在PWM波驱动下桥式电路产生脉冲电压,从而给直流电机供电。
当给定为5时,PWM发生器输出占空比为0.75和0.25的两路信号分别作用于桥式H电路,PWM变换器输出占空比为0.75,平均电压为110V,电机转速应为额定空载转速的一半。
当给定为0时,PWM发生器输出占空比都为0.5,PWM变换器输出占空比为0.5此时桥式H型电路输出平均电压为0V,电机稳态转速为0。
当给定为负时,PWM发生器输出占空比为0-0.5和0.5-1,PWM变换器输出占空比0-0.5,平均电压小于0V,电机反转。
图6、9为直流电机在空载时的启动响应曲线。
需要说明的是由于想使PWM 观察更明显,故将PWM频率设置较小,仅为200Hz,所以转速、电枢电流、电磁转矩的脉动比较大,但并不失仿真的一般性,而且原理更为清楚。
2.单闭环PWM可逆直流调速系统仿真模型
2.1单闭环PWM可逆直流调速系统仿真模型如图7所示:
图10.单闭环PWM可逆直流调速系统仿真模型
2.2单闭环环PWM可逆直流调速系统仿真结果
当给定值为7时,PWM发生器波形、桥式电路输出电压波形、以及直流电机转速、电枢电流、励磁电流和电磁转矩波形分别如下:
图11.PWM发生器波形输出波形图12.桥式电路输出电压波形
图13.直流电机转速、电枢电流、励磁电流和电磁转矩波形
2.3仿真结果分析
上图为直流电机空载时电机的输出响应从PWM发生器输出波形可知,闭环直流调速系统能根据给定于反馈的误差自动调节输出脉冲宽度,调节占空比,从而改变桥式可逆PWM变换器输出的平均电压,从而控制转速。
由于比例调节系统是基于当前误差的调节,与历史值无关,是有差调节,故稳态转速下降。
其余特性和开环特性一样。
六.实习心得
《运动控制系统》是自动化专业的一门主干专业课程,经过一周的控制系统仿真课程设计的学习和实践,我基本掌握了针对某个电机控制系统功能模块或整个控制系统进行设计与实现,使我能进一步加深对课堂教学内容的理解,了解典型的电机控制系统基本控制原理和结构,掌握基本的调试方法,提高综合应用知识的能力、分析解决问题的能力和工程实践能力,并初步培养了实事求是的工作作风和撰写科研总结报告的能力。
在仿真的过程中,我遇到了各种各样的问题,比如模块的寻找,参数如何设置等。
经过我不懈的努力,通过咨询老师、查询资料、询问同学等各种途径,逐步解决了仿真课程设计中遇到的问题,并按时完成了学习任务。
经过此次实习后,我对matlab软件有了更深的了解,熟悉matlab在控制领域的应用,会用matlab中的各个模块对系统进行仿真,从而加深了自己对所学知识的理解与应用。
- 10 -。