基于刚柔耦合模型的行星传动固有特性分析_张俊
《机械工程学报》被EI收录论文目次(2009年第5期)
车辆行驶过程 中的状态估计 问题综述 ……………………………………… ………………………………余卓平 高晓杰 (O 2)
基于声全息 的故 障诊 断方法 ………………………………………………… ……………………李加庆 陈 进 史重九 ( 4 3) 轨道结构参数对轮轨滚动接触应力影 响…………………………………… ……………………王文健 郭 俊 刘启跃 (9 3) 罗德系数 的一点推广及应用 … ……………………………………………………………………李 峰 苑世剑 刘 钢 ( 5 4) 静 电梳状硅微单侧直脚谐振器 的力 学性 能………………………………… …………………………………………沈 雪瑾 ( 9 4) 指尖密封迟滞特性 的机理分析 ………………………………………………………………………………苏 华 陈国定 (7 5) 仿 生 蜥 蜴 行 为 的三 目标 协 同进 化 算 法 及 机 构 设计 应 用 … … … … … … … … …… … … … … …谢 能 刚 岑 豫 皖 王 璐 等 (2 6) 非线性系统 的集成故 障诊 断和容错控制 ………………………………………………………何 静 邱 静 张昌凡等 (0 7) 组织特征对 GH 6 8 4合金裂纹扩展行 为的影 响 ……… ………………………………………・ 王 璞 董建新 韩一 纯等 (9 7) 行星传动动态均载特性分析 … …………………………………………………… ………………陆俊 华 朱如鹏 靳 广虎 (5 8) 基于 P DE的振动信号去噪 …………………………… …………………………………………・ 吴宏钢 尹爱军 秦树人 ( 1 9) 混合 品种装配线平衡 问题 的一种混合搜 索机制 的蚁群算法 …………………… ……………张则强 程 文明 钟 斌等 (5 9) 基于分子 电流法轴 向永磁轴承轴 向刚度 的分析 ………………………………………………・ 王洪 昌 蒋书运 梁玉飞 ( 0 ) 12 轻度混合动力 A MT系统换挡品质控制 …………………………………………………………叶 明 秦大 同 刘振 军 ( 0 ) 18 混合动力系统控制软件 的开发 …… …………………………………………………… ………- - 智 薛俊 亮 潘 凯 ( 1 ) 张俊 15 散乱模 型的四边形 网格剖 分方法 … …………………………………………………… ………・ 陈 涛 李光耀 韩 旭 ( 2 ) 1 1 三维蛇形机器人 巡视 者 I 的开发 ………… ………………………………………………… 叶 长龙 马 书根 李 斌等 ( 2 ) I 18 基 于计算流体动 力学 的两栖车辆 水动力特 性数值 计算……………………………… ………・ 高富东 姜 乐华 潘存 云 ( 3 ) 14 数字化制造装备 的主轴服役性 能监 测与诊断……………………………………………… …・ 陈雪峰 曹宏瑞 何正嘉 ( 4 ) 10 双模式 非稳 定结构移 动机器 人 ………… …………………………………………………… ・ 李京涛 高学山 黄 强等 (4 ) 17 多 目标粒子群优化算法在 薄板 冲压 成形中的应用…………………………………………・ 光永 李光耀 陈 涛等 (5 ) 孙 13 基 于广 义轴 理论 的产 品拆 卸路径规划… ……………………………………………………・ 田 颖 王 太勇 何改云等 (6 ) 10 基 于泵送压 力的混凝 土泵 排量计量方法 ・ …………………………………………………… 刘会 勇 李 伟 林勇刚等 (6 ) 1 5 确 定性 磁射 流抛 光技 术 ………………… ……………………………………………………・ 戴一帆 张学成 李圣怡等 (7 ) 1 1 4 C 超声表面滚压加工纳米化 …………………………” 0r ……………………………… …“王 婷 王 东坡 刘 刚等 (7 ) 17 基 于复合喷气压 电驱动器的柔性机械臂振动控制……………………………………………・ 邱志成 韩建 迭 王越超 (8 ) 14 控 制锻件 变形均匀性和变形力的锻造预成形多 目标优化设计……………………………・ 赵新 海 李剑峰 黄 晓慧等 (9 ) 13 种新的基于 B T壳单元的一步法…………………………………………………………… 傅 立军 董 湘怀 王 鹏 (9 ) S 18 恒定微压下微小流量的非定常流测量方法 ……… …………………………………………・ 魏列江 冀 宏 李少年等 (0 ) 24 基 于能量调节的 电液变转速控制系统 …………… ……………………………………………・ 沈海阔 金 波 陈 鹰 (0 ) 2 9 基于物理模型的计算机视觉轮对踏面擦伤检测方法………………………………………・ 杨雪荣 张湘伟 成 思源等 ( 1 ) 24 3 R C并联机器 人动 力学分析………………………… ……………………………………・ -_ R 刘善增 余跃庆 刘庆 波等 (2 ) 2 0 人一机一路环境下摩托车刚柔耦合系统动力学研究 …… ……………………………………・ 朱才朝 唐 倩 黄 泽好等 (2 ) 2 5 面 向单元切削过程的切削参数优化模型 …………………………………………………………………・ 陈志同 张保 国 (3 ) 2 0 基于类等势场的粉末高温合金盘件预成形设计及有 限元模拟……………………………・ 王晓娜 李付国 肖 军等 ( 3 ) 2 7 多用途军用方舱和轿式改装车 的电磁脉冲加 固设计 …………… …………………………・ 陶灵姣 吕承立 李 智等 (4 ) 2 4
机械系统中的刚柔耦合动力学分析

机械系统中的刚柔耦合动力学分析引言机械系统的刚柔耦合动力学分析是研究刚性部件和柔性部件耦合工作时的振动特性和动力学性能的过程。
刚柔耦合系统由刚性和柔性部件组成,其刚性部件具有高刚度和低振动特性,柔性部件则具有低刚度和高振动特性。
刚柔耦合分析在现代工程设计和制造中具有重要的作用,尤其是在飞行器、机器人、精密仪器等领域中的应用。
一、刚柔耦合动力学模型刚柔耦合动力学模型是描述该系统振动行为的数学模型。
该模型可以基于刚体动力学和弹性体动力学原理建立。
刚体动力学模型涉及质点、刚体的平移和旋转运动方程,弹性体动力学模型涉及刚体振动的波动方程和柔性部件的变形方程。
综合考虑刚体和弹性体的动力学模型,可建立刚柔耦合动力学模型,用于研究振动响应和动力学性能。
二、刚柔耦合系统的耦合方式刚柔耦合系统的耦合方式主要包括刚体与柔性部件的物理耦合和动力学耦合。
物理耦合是指刚体和柔性部件通过连接件(如螺栓、焊接等)实现的实体耦合,确保其共同工作。
动力学耦合是指刚体和柔性部件在振动过程中相互作用和影响。
物理耦合和动力学耦合的研究有助于理解刚柔耦合系统的振动特性和动力学行为,提高系统工作的稳定性和可靠性。
三、刚柔耦合系统的振动特性分析刚柔耦合系统的振动特性是研究该系统固有频率、模态形状和振型等振动性质的过程。
通过振动特性分析,可以确定系统的谐振频率和振型,为系统优化设计和振动控制提供依据。
常用的方法包括有限元分析、模态分析和振动测试等。
其中,有限元分析是一种基于数值计算的方法,可以模拟系统的振动响应,模态分析可以获得系统的固有频率和模态形状,振动测试可以直接测量系统的振动状态。
四、刚柔耦合系统的动力学性能分析刚柔耦合系统的动力学性能是研究该系统在外部激励作用下的响应和行为。
动力学性能分析主要包括动力学模态分析、频率响应分析和阻尼特性分析等。
动力学模态分析可以研究系统在特定工况下的振动行为和能量分布,频率响应分析可以研究系统在不同频率下的响应特性,阻尼特性分析可以研究系统的振动耗能和稳定性。
基于ADAMS与NASTRAN的刚柔耦合体动力学分析方法
目 前 , 成 熟 的 商 业 化 CAE 软 件 有 许 多 , 其 中 最 著 名 的 是 MSC 公 司 推 出 的 ADAMS、Patran/Nastran。 其 中 ADAMS 是 多 体
( 6) 通 常 计 算 弹 性 体 的 固 有 频 率 需 要 添 加 约 束 条 件 消 除 刚 体位移。但在生成柔性体时, 不需要定义约束条件。由 Nastran 计 算生成的模态中性文件 ( MNF 文件) , 包含了柔 性 体 的 几 何 信 息、节点质量、模态、模态质量、模态刚度等信息。将 MNF 文件导 入 ADAMS 就可生成相应的柔性体模型。
力学方程:
( 5)
L=T- W, T 和 W 分 别 为 动 能 和 势 能 , & 为 能 量 损 耗 函 数 , % 为选定的广义坐标, Q 为投影到 % 上的广义力, ’ 为约束方程, ( 为对应于 ’ 的拉氏乘子。得到最终的动力学微分方程:
刚柔耦合动力学模型
刚柔耦合动力学模型刚柔耦合动力学模型是一种优秀的分析研究机械系统动态响应的方法。
它将刚体与柔体耦合在一起,综合考虑了它们各自的特性,可以更加真实地模拟实际的复杂机械系统。
刚柔耦合动力学模型着重考虑了两种物体的特性:刚体和柔体。
其中,刚体通常是指机械系统中的固定部分,它的运动状态可以由其欧拉角度量表示。
柔体则是指机械系统中的可以变形的部分,比如弹性杆、柔性连杆等,其变形可以通过弹性力表示。
通过将这两种物体结合起来,就可以建立一个更为真实的机械系统动力学模型。
在刚柔耦合动力学模型中,总的动力学方程可以分解为两个部分。
一部分是刚体的运动方程,它可以表示为:M*q''+C*q'+K*q=F(t)其中,q表示系统的状态向量,M、C、K分别是系统的质量矩阵、阻尼矩阵和刚度矩阵,F(t)是系统的外力,q'和q''分别表示状态向量q的一阶导数和二阶导数。
这个方程主要描述了刚体的运动规律。
另一部分则是柔体的运动方程,它可以表示为:D(x,t)x''+K(x)x=F(t)其中,x表示柔体的状态变量,D和K分别是柔体的阻尼系数和刚度系数,F(t)是系统的外力。
这个方程主要描述了柔体的运动规律。
通过将这两个方程组合在一起,就可以得到刚柔耦合动力学方程,即:[M 0 ;0 D(x,t)]*[q'';x'']+[C K(x);-K(x) 0]*[q';x']+[K(x) 0;00]*[q;x]=[F(t);0]其中,0代表零矩阵。
这个方程表示了整个机械系统的运动规律,可以通过求解状态向量q和柔体状态变量x的运动方程,来获得系统运动的轨迹和响应。
在实际应用中,一般采用有限元方法或类似方法来求解柔体的运动方程,求解刚体的运动方程则常采用欧拉积分或基于Runge-Kutta方法等数值方法。
除了上述的动力学方程以外,还需要考虑其他因素对机械系统的影响,比如摩擦力、已知外力等。
基于刚柔耦合模型的卡扣机构动力学仿真分析

基于刚柔耦合模型的卡扣机构动力学仿真分析王冰冰;林木;王月婷【摘要】The paper establishes a snap-in mechanism rigid coupling model by the ADAMS,which is used to accurately and truly reflect the movement of the snap-in mechanism and analyzes the dynamics and multi-body model of the lifts and the snap-in mechanism.Through the analysis,it is found that significant fluctuation exists in the velocity and acceleration curves,when the displacement curve of the rigid coupling model remains unchanged and its reason is analyzed.The guiding direction is provided for further optimizing the mechanism.%运用ADAMS建立了卡扣机构刚柔耦合模型,准确并真实地反应出了卡扣机构的运动情况,将升降台和卡扣机构动力学特性与多刚体模型进行对比分析.通过分析发现,基于刚柔耦合模型下升降台和卡扣机构在位移曲线保持不变的情况下,工作时的速度、加速度曲线有明显波动,并通过分析波动的原因,为机构的进一步优化提出了指导方向.【期刊名称】《机械制造与自动化》【年(卷),期】2017(046)001【总页数】5页(P103-106,123)【关键词】ADAMS;动力学仿真;刚柔耦合【作者】王冰冰;林木;王月婷【作者单位】大连海洋大学应用技术学院,辽宁大连116300;大连海洋大学应用技术学院,辽宁大连116300;大连海洋大学应用技术学院,辽宁大连116300【正文语种】中文【中图分类】TH113.2+2在以往的机构动力学仿真研究中,一般将机构系统作为刚性体来对待,其各个构件都属于刚体,在力的作用下不会反映出弹性变形,这种把构件当做刚体系统来处理,在大多数的情况下是可以满足精度要求的,但是在考虑构件变形的情况下完全将构件考虑成刚性体来处理不能达到精度的要求。
基于UM的高速客车刚柔耦合动力学分析

基于UM的高速客车刚柔耦合动力学分析基于UM的高速客车刚柔耦合动力学分析摘要:高速客车的刚柔耦合动力学分析是车辆工程中的重要研究内容之一。
本文以UM(Unified Modeling Language)为基础,通过建立高速客车的刚体-柔体模型,进行动力学分析。
首先,通过分析高速客车的结构特点,建立了包括车身、底盘、悬挂等组成部分的刚体模型,并给出了相应的质量、惯性矩阵;其次,根据高速客车的弹性特性,建立了包括车身、车轮、悬挂等组成部分的柔体模型,并给出了相应的刚度矩阵;最后,将两个模型进行耦合,建立了刚柔耦合模型,并通过数值仿真的方法进行分析。
关键词:高速客车;刚柔耦合;动力学分析;UM;模型建立1. 引言随着交通运输的发展,高速客车在现代社会中占据着重要地位。
然而,高速客车的振动和噪声问题成为限制其性能的重要因素之一。
因此,对高速客车的刚柔耦合动力学进行深入研究,对于提高车辆的性能和舒适性具有重要意义。
2. UM的概述UM是一种用于软件系统设计、建模和文档化的标准化语言。
它提供了丰富的图形、符号和语义,可以用于建立复杂系统的模型。
本文选用UM作为建立高速客车刚柔耦合动力学模型的工具。
3. 高速客车的刚体模型高速客车的刚体模型是建立刚柔耦合动力学模型的基础。
通过分析高速客车的结构特点,将其划分为车身、底盘和悬挂三个组成部分。
根据刚体力学原理,可以得到各组成部分的质量、惯性矩阵。
以车身为例,假设车身为刚体,其质量可以表示为m1,惯性矩阵为I1。
同理,底盘和悬挂部分的质量、惯性矩阵分别表示为m2、m3和I2、I3。
4. 高速客车的柔体模型高速客车的柔体模型考虑了车辆的弹性特性。
以车身为例,根据弹性力学原理,车身的变形可以表示为F1 = K1 * δ1,其中F1为应力,K1为刚度矩阵,δ1为变形量。
类似地,车轮和悬挂部分的弹性特性可以通过刚度矩阵来表示。
5. 刚柔耦合模型的建立将高速客车的刚体模型和柔体模型进行耦合,建立了刚柔耦合模型。
刚柔耦合齿轮三维接触动力学建模与振动分析
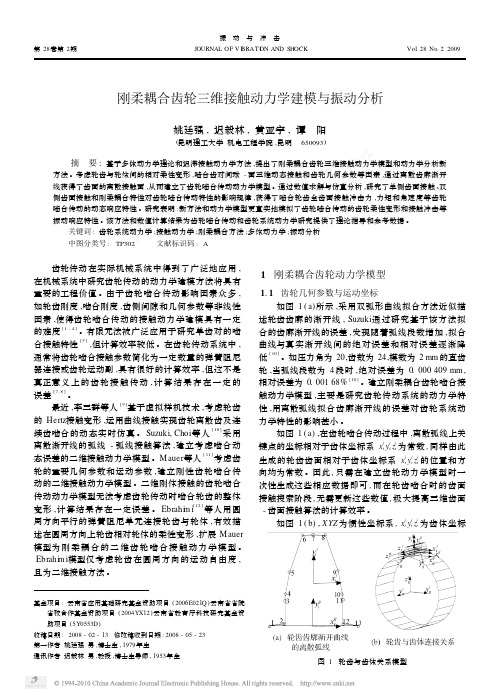
振 动 与 冲 击第28卷第2期JOURNAL OF V I B RATI O N AND SHOCKVol .28No .22009 刚柔耦合齿轮三维接触动力学建模与振动分析基金项目:云南省应用基础研究基金资助项目(2006E021Q )云南省省院省校合作基金资助项目(2004YX12)云南省教育厅科技研究基金资助项目(5Y0553D )收稿日期:2008-02-13 修改稿收到日期:2008-05-23第一作者姚廷强男,博士生,1979年生通讯作者迟毅林男,教授,博士生导师,1953年生姚廷强,迟毅林,黄亚宇,谭 阳(昆明理工大学机电工程学院,昆明 650093) 摘 要:基于多体动力学理论和迟滞接触动力学方法,提出了刚柔耦合齿轮三维接触动力学模型和动力学分析新方法。
考虑轮齿与轮体间的相对柔性变形,啮合齿对间球-面三维动态接触和齿轮几何参数等因素,通过离散齿廓渐开线获得了齿面的离散接触面,从而建立了齿轮啮合传动动力学模型。
通过数值求解与仿真分析,研究了单侧齿面接触、双侧齿面接触和刚柔耦合特性对齿轮啮合传动特性的影响规律,获得了啮合轮齿全齿面接触冲击力,力矩和角速度等齿轮啮合传动的动态响应特性。
研究表明:新方法和动力学模型更真实地模拟了齿轮啮合传动的齿轮柔性变形和接触冲击等振动响应特性。
该方法和数值计算结果为齿轮啮合传动和齿轮系统动力学研究提供了理论指导和参考数据。
关键词:齿轮系统动力学;接触动力学;刚柔耦合方法;多体动力学;振动分析中图分类号:TP302 文献标识码:A 齿轮传动在实际机械系统中得到了广泛地应用,在机械系统中研究齿轮传动的动力学建模方法将具有重要的工程价值。
由于齿轮啮合传动影响因素众多,如轮齿刚度,啮合刚度,齿侧间隙和几何参数等非线性因素,使得齿轮啮合传动的接触动力学建模具有一定的难度[1-4]。
有限元法被广泛应用于研究单齿对的啮合接触特性[5],但计算效率较低。
在齿轮传动系统中,通常将齿轮啮合接触参数简化为一定数量的弹簧阻尼器连接或齿轮运动副,具有很好的计算效率,但这不是真正意义上的齿轮接触传动,计算结果存在一定的误差[7,8]。
刚柔耦合动力学模型
刚柔耦合动力学模型
刚柔耦合动力学模型是一种模拟柔性物体在刚性结构体上运动和互动的模型。
它是基于多体动力学和弹性理论的复杂模型,通常用于机器人的机械臂、手指、足部等柔性部件的控制和仿真。
在这个模型中,刚性部件和柔性部件之间相互作用,并且对于柔性物体,则采用比较精确地黎曼曲面理论表示。
动力学模型包含了刚性部件的质量、几何结构、摩擦和约束力以及柔性物体的刚度、阻尼和粘滞阻尼。
在这个模型中,刚性结构体可以被表示成结构体中的多个质点,这些点可以通过使用牛顿运动定律和质点系统动力学方程进行运动学和动力学分析。
而柔性物体则可以通过有限元分析进行数值求解和建模,并考虑其非线性本质。
这个模型的分析使得我们可以预测柔性物体在刚性结构体上的运动和应变情况。
刚柔耦合动力学模型的成功建立与应用,为控制机器人手指、足部等柔性部件的制造和控制提供了有效的数学工具。
在现代机器人领域,一些先进的机器学习算法和控制方法已经被成功地应用到刚柔耦合动力学模型中,使得机器人系统的性能和精度得到了大幅提升。
同时,这个模型也为金属材料、塑料材料等柔性材料的应用和制造提供了有力的理论参考。
总之,刚柔耦合动力学模型对于研究和控制复杂机器人和柔性材料产生了重要的价值,为领域的发展奠定了坚实的理论基础。
人字齿行星传动多体动力学建模与分析

人字齿行星传动多体动力学建模与分析刘振州;汪建;张俊【摘要】根据人字齿行星传动的结构特点,借助ADAMS建立该类传动的多体动力学模型,对其进行自由振动特性分析.结果表明,当人字齿轮左右两部分结构完全对称时,人字齿行星传动存在中心构件扭转振动、中心构件平移振动和行星轮振动3种典型模式,且3种振动模式的特点与直齿行星传动基本一致.在不考虑传动件结构柔性的情况下,基于多体动力学模型的自由振动分析结果与采用集中参数模型的仿真结果完全一致,表明本文所建模型的正确性,可为后续的参数敏感度分析及动响应分析提供模型依据.【期刊名称】《安徽工业大学学报(自然科学版)》【年(卷),期】2015(032)002【总页数】5页(P152-156)【关键词】人字齿行星传动;多体动力学;固有特性;自由振动【作者】刘振州;汪建;张俊【作者单位】安徽工业大学机械工程学院,安徽马鞍山243032;安徽工业大学机械工程学院,安徽马鞍山243032;安徽工业大学机械工程学院,安徽马鞍山243032【正文语种】中文【中图分类】TH132.425行星轮系的动力学建模是进行后续模态分析、振动分析、参数灵敏度分析和抑振分析的基础[1-4]。
按照建模方法和模型的精细化程度,行星轮系的动力学模型大致可分为集中质量模型、分布质量模型和刚柔耦合模型。
其中,集中质量模型因建模简单求解方便而被广泛采用。
Kahraman[5]在绝对坐标系下建立了直齿行星传动模型,分析了啮合相位与制造误差、装配误差对系统动力学性能的影响。
此后,Lin等[6]在随动坐标系下建立了计入构件平面复合运动的平移-扭转耦合动力学模型,并进一步分析了该类传动的自由振动特性。
随后张俊等[7]修正了前人建模中的若干错误,推导了固有频率的解析表达式,更为准确地揭示了直齿行星传动模态特性的一般规律。
延续这一思路,学者们进一步研究了行星传动的参数灵敏度[8]、稳态动响应[9]等。
与集中质量模型将轮系处理为弹簧-阻尼-振子系统不同,分布质量模型因能计入系统各构件的柔性而具有较高的计算精度。
挠性航天器刚柔耦合动力学建模与姿态控制技术的研究共3篇

挠性航天器刚柔耦合动力学建模与姿态控制技术的研究共3篇挠性航天器刚柔耦合动力学建模与姿态控制技术的研究1在航天探索中,挠性航天器的应用越来越广泛,得到了十分重视。
它具有重量轻、载荷能力强等优势,但相对应的却是挠性大,对姿态控制和稳定性要求极高。
挠性航天器的刚柔耦合动力学建模是研究其姿态控制技术的基础。
在建模中,需要考虑它的结构、弹性、惯性和控制等因素,综合分析其动力学性质。
大量的理论分析和实验研究表明,刚体模型无法贴切准确地描述挠性航天器的动态响应,所以需要建立刚柔耦合动力学模型。
模型的复杂性需要高精度数学方法的支持,而采用有限元法对其进行建模是目前较为常用的方法之一。
建模过程中,特别要注意模型精度和计算效率的平衡,以避免精度和时间的浪费。
在进行姿态控制的过程中,通常采用的是控制定律或控制策略。
其中,比较常见的是开环控制和闭环控制。
开环控制是直接将控制信号给予执行机构,缺点是无法实时地反馈和调整,容易失去控制;而闭环控制则在开环控制的基础上,引入了反馈调节,可以根据反馈信号进行实时控制,能够更好地控制姿态,但同时也增加了复杂度。
挠性航天器的姿态控制技术应用场景较为复杂,需要根据不同的任务需求,采用不同的控制策略。
例如,在对星载望远镜进行观测时,需要对挠性航天器的姿态做出高精度控制,可以采用自适应控制策略;在进行卫星捕获和交会对接时,需要将挠性航天器的姿态快速稳定,可以采用模型参考自适应控制策略等。
总的来说,挠性航天器刚柔耦合动力学建模和姿态控制技术的研究,对于保障航天器安全、提高航天器任务成功率具有重要作用。
在实际应用中,需要综合考虑针对不同任务情况选择合适的建模方法和控制策略,以实现航天器的精准运行和任务完成综上所述,挠性航天器刚柔耦合动力学建模与姿态控制技术是航天器领域研究的重要方向之一。
建模方法和控制策略的选择直接影响航天器的安全和任务成功率。
因此,需要持续深入研究,不断完善技术手段,以确保航天器的正常运行和各种任务的高质量完成挠性航天器刚柔耦合动力学建模与姿态控制技术的研究2随着科技的不断发展,人类对于探索宇宙的渴望也越来越强烈。
基于刚柔耦合的自动化动力学仿真分析研究

第6期(总第169期)2011年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672-6413(2011)06-0071-03基于刚柔耦合的自动化动力学仿真分析研究张士存1,付月磊2(1.南车青岛四方机车车辆股份有限公司,山东 青岛 266111;2.安世亚太科技(北京)有限公司,北京 100026)摘要:刚柔耦合是多体系统最常见的力学模型,在其建模分析过程中存在一定的复杂性与重复性。
以三连杆机构为例,通过ANSYS和ADAMS实现刚柔耦合全分析过程,并利用ModelCenter的QuickWrap技术对整个分析过程的功能点进行组件封装,最后通过封装好的组件搭建刚柔耦合分析流程,最终实现自动化的刚柔耦合分析,为进一步的DOE及优化分析奠定了基础。
关键词:刚柔耦合;自动化;动力学;ANSYS;ADAMS中图分类号:TP391.9 文献标识码:A收稿日期:2011-06-28;修回日期:2011-07-08作者简介:张士存(1979-),男,山东济南人,工程师,本科,主要从事仿真集成及高性能计算集群应用工作。
0 引言在机械系统中,柔性体会对整个系统的运动产生重要影响,在进行运动学分析时如果不考虑柔性体的影响将会造成很大的误差,同样整个系统的运动情况也反过来决定了每个构件的受力状况和运动状态,从而决定了构件内部的应力应变分布。
因此采用ANSYS和ADAMS软件的联合仿真应运而生,它不但可以精确地模拟整个系统的运动,而且可以基于运动仿真的结果对运动系统中的柔性体进行应力应变分析[1,2]。
本文基于柔性体仿真的基本数学模型[3,4],以三连杆机构为例,进行刚柔耦合动力学仿真分析全过程研究。
1 刚柔耦合分析本文所要分析的模型为三连杆机构,其中中间的连杆考虑作为柔性体,具体分析模型如图1所示。
1.1 柔性体模态中性文件生成进行刚柔耦合分析的第一步便是创建柔性体的模态中性文件*.mnf文件,模态中性文件是ADAMS软件进行刚柔耦合分析所需要的文件,它包含了柔性体的质量、质心、转动惯量、频率、振型以及对载荷的参与因子等信息,该步骤是在ANSYS中完成的。
基于悬架刚柔耦合模型的汽车平顺性
基于悬架刚柔耦合模型的汽车平顺性
张立军;张宇;赵亮
【期刊名称】《农业机械学报》
【年(卷),期】2008(39)8
【摘要】基于多体动力学理论,应用机械系统分析软件ADAMS/Car,建立了计及悬架下摆臂、纵向推力杆和横向稳定杆柔性的刚柔耦合整车模型,其中柔性杆件的模态通过有限元分析获得.对车身、下摆臂垂直加速度功率谱密度以及悬架动行程和轮胎动位移进行了分析.并与多刚体模型的仿真结果进行了比较.研究结果表明:与刚体模型相比,刚柔耦合的作用使车身垂直加速度功率谱密度的幅值降低了21.5%,下摆臂垂直加速度功率谱密度的峰值减小71.3%,轮胎动载荷减小约10%,悬架动行程增大15%~20%;刚柔耦合模型之间的差异随车速提高,悬架构件的柔性在汽车平顺性分析中不可忽视.
【总页数】5页(P28-32)
【作者】张立军;张宇;赵亮
【作者单位】辽宁工业大学汽车与交通工程学院,121001,锦州市;辽宁工业大学汽车与交通工程学院,121001,锦州市;辽宁工业大学汽车与交通工程学院,121001,锦州市
【正文语种】中文
【中图分类】U461.4;U463.33
【相关文献】
1.采用刚柔耦合模型的轿车平顺性仿真分析及优化 [J], 王滕;欧健;张勇;杨鄂川;邓国红
2.刚柔耦合汽车平顺性仿真及试验研究 [J], 张一京;王文源;王陶;袁刘凯;张汤赟;王良模
3.考虑悬架柔性的刚柔耦合汽车平顺性研究 [J], 欧健;张青林;杨鄂川;张勇
4.采用刚柔耦合模型的轿车平顺性仿真分析及优化 [J], 王滕;欧健;张勇;杨鄂川;邓国红;
5.基于刚柔耦合模型的电动轮自卸车平顺性分析与优化 [J], 伍文广;谷正气;米承继因版权原因,仅展示原文概要,查看原文内容请购买。
浮动太阳轮对行星齿轮传动系统动态特性影响研究
浮动太阳轮对行星齿轮传动系统动态特性影响研究杨占力1刘英辉1朱继瑞1王飞跃2甄冬1张慧博1(1河北工业大学机械工程学院,天津300401)(2天津职业技术师范大学机械工程学院,天津300222)摘要行星齿轮传动因具有较大的传动比和较高的传动效率而被广泛应用于机械传动系统中。
在行星齿轮箱中,太阳轮通常被设置为浮动的,以平衡各行星齿轮之间的负载。
但是,太阳轮的浮动设置将导致啮合过程中的压力角、重合度和啮合相位的变化。
在以前的研究中,这些参数被近似为常数。
为了研究动态参数对行星齿轮箱在不同工况下振动响应的影响,建立了行星齿轮箱集总参数模型,该模型包含时变压力角、时变重合度和时变啮合相位。
基于该模型,分析了太阳轮的振动机理,并与恒定参数模型进行比较,揭示了由这些动态参数引起的相位调制规律。
通过比较不同负载和转速下的动态响应,研究了不同工况条件下的相位调制。
关键词行星齿轮箱集总参数模型时变压力角时变啮合相位相位调制Study on the Influence of Floating Sun Gear on the Dynamic Characteristicof Planetary Gear Transmission SystemYang Zhanli1Liu Yinghui1Zhu Jirui1Wang Feiyue2Zhen Dong1Zhang Huibo1(1School of Mechanical Engineering,Hebei University of Technology,Tianjin300401,China)(2School of Mechanical Engineering,Tianjin University of Technology and Education,Tianjin300222,China)Abstract Planetary gearboxes are widely used in mechanical transmission systems due to their large transmission ratio and high transmission efficiency.In a planetary gearbox,the sun gear is usually set to float to balance the sharing of loads among planet gears.However,this floating set will result in the variation of pres⁃sure angle,overlap ratio and meshing phase in the meshing progress.In the previous studies,these parameters were reduced to constant.To study the influence of the dynamic parameters on the vibration response of plane⁃tary gearboxes under different operating conditions,a new lumped parameter model containing the time-varying pressure angle,time-varying overlap ratio and time-varying meshing phase is established.Based on this mod⁃el,the vibration response mechanism of the sun gear is analyzed.Moreover,the comparison with the previous model is made and the rule of phase modulation caused by these dynamic parameters is revealed.By comparing the dynamic responses under different loads and rotation speeds,the phase modulation is studied in detail.Key words Planetary gearbox Lumped parameter model Time-varying pressure angle Time-vary⁃ing meshing phase Phase modulation0引言行星齿轮箱以其大传动比、高传动效率和紧凑的结构形式而广泛应用于各种机械装置,例如汽车、直升机、风力涡轮机和机器人等[1]65-66。
刚—柔耦合系统动力学建模理论与仿真技术研究
刚—柔耦合系统动力学建模理论与仿真技术研究一、概述随着现代科学技术的发展,刚—柔耦合系统在航空、航天、机械工程等多个领域发挥着越来越重要的作用。
这类系统通常由刚体部分和柔性体部分组成,其动力学行为既包含刚体的运动特性,也包含柔性体的变形特性。
如何准确、高效地对刚—柔耦合系统进行动力学建模和仿真,对于理解和预测系统在实际工作条件下的行为,以及优化系统设计具有重要意义。
本文旨在对刚—柔耦合系统的动力学建模理论与仿真技术进行深入研究。
将对刚—柔耦合系统的基本概念、特点和分类进行介绍,明确研究背景和意义。
随后,将综述当前在刚—柔耦合系统动力学建模领域的主要方法和进展,包括基于多体系统动力学理论的建模方法、有限元方法、以及近年来兴起的刚—柔耦合建模方法。
在此基础上,本文将重点探讨刚—柔耦合系统动力学建模的关键技术,如刚柔耦合界面的建模、参数识别、以及模型验证等。
本文还将探讨刚—柔耦合系统动力学仿真的相关技术。
仿真技术的选择和实现对于准确预测系统动态行为至关重要。
本文将分析不同的仿真策略,如多体系统动力学仿真、有限元仿真以及多尺度仿真,并探讨这些策略在刚—柔耦合系统中的应用。
同时,将讨论仿真过程中可能遇到的问题和挑战,如计算效率、精度控制和结果分析等。
本文将通过具体的案例研究,展示所提出的动力学建模与仿真技术在刚—柔耦合系统中的应用效果,验证所提方法的有效性和实用性。
通过本文的研究,期望能为刚—柔耦合系统动力学建模与仿真技术的发展提供新的理论依据和技术支持。
1. 刚—柔耦合系统的定义与特性刚—柔耦合系统是指在工程实际中广泛存在的一类复杂系统,其核心特点在于系统内同时包含了刚性部件和柔性部件。
这种系统的动力学行为不仅受到刚性部件的直接影响,还受到柔性部件的显著作用。
刚—柔耦合系统的动力学建模与仿真技术研究,对于理解和预测这类系统的动态行为具有重要的理论和实际意义。
刚—柔耦合系统可以被定义为一个由至少一个刚性部件和一个柔性部件组成的动力学系统。
刚柔耦合动力学在航天器驱动机构力矩设计上的应用
刚柔耦合动力学在航天器驱动机构力矩设计上的应用
郭其威;陈宝东;马季军;罗斌
【期刊名称】《载人航天》
【年(卷),期】2011(017)006
【摘要】基于刚柔耦合动力学理论,在充分考虑空间各干扰力矩、柔性太阳翼惯性力矩、以及轴承附加阻力矩等作用基础上,建立了相应动力学仿真模型,针对目标飞行器驱动机构开展了各工况下的驱动力矩设计工作。
仿真计算比较了“部分耦合”与“全耦合”两种算法计算结果间的差异,给出了该驱动机构“驱动力矩”及“止动力矩”设计指标,并据此进行了电机、谐波减速器等的选型工作。
【总页数】7页(P45-50,64)
【作者】郭其威;陈宝东;马季军;罗斌
【作者单位】上海宇航系统工程研究所上海市空间飞行器机构重点实验室;上海宇航系统工程研究所上海市空间飞行器机构重点实验室;上海空间电源研究所;上海航天技术研究院
【正文语种】中文
【中图分类】V414.19
【相关文献】
1.航天器刚柔耦合动力学建模及热诱发动力学响应分析 [J], 孙述鹏;王伟;段枭
2.航天器太阳阵的刚柔耦合动力学与控制研究 [J], 段柳成;李海泉;刘晓峰;蔡国平
3.带太阳帆板航天器刚柔耦合动力学研究 [J], 蒋建平;李东旭
4.刚柔耦合动力学——轻量化协作机器人设计与控制的力学基础——解读《机器人刚柔耦合动力学》 [J], 尹海斌
5.含间隙铰接的柔性航天器刚柔耦合动力学与控制研究 [J], 孙杰;孙俊;刘付成;朱东方;黄静
因版权原因,仅展示原文概要,查看原文内容请购买。
基于相位调谐的直齿行星齿轮传动动力学理论与实验研究
基于相位调谐的直齿行星齿轮传动动力学理论与实验研究一、本文概述本文针对基于相位调谐的直齿行星齿轮传动的动力学特性及其优化方法进行了深入系统的研究。
在现代机械传动系统中,直齿行星齿轮机构因其高传动效率、紧凑结构以及承载能力强等特点被广泛应用,尤其在风力发电、航空航天及高端装备制造业中发挥着关键作用。
由于其内部复杂的多体动力学交互作用,传动精度和稳定性受到相位调谐等因素显著影响。
本文首先构建了考虑相位调谐效应的直齿行星齿轮传动动力学模型,通过引入先进的有限元分析和多体动力学理论,对传动系统的动态响应和振动特性进行了理论建模与仿真分析。
研究核心聚焦于探讨相位调谐对传动误差、振动噪声、接触应力分布等关键性能指标的影响规律,并在此基础上,提出了一种基于优化算法的相位调谐策略,旨在改善并优化直齿行星齿轮传动的动态性能。
实验研究方面,设计并实施了一系列严谨的实验方案,通过对比不同相位调谐条件下的实测数据与理论预测结果,验证了所建立模型的有效性和提出的调谐方法的实际应用价值。
预期研究成果将不仅丰富和完善直齿行星齿轮传动动力学理论体系,而且对于提升相关领域设备的设计水平和运行性能具有重要的实践指导意义。
二、直齿行星齿轮传动基本原理与数学模型直齿行星齿轮传动是一种广泛应用在高功率密度场合的精密传动装置,其主要由太阳轮、行星轮、行星架以及内齿圈等核心部件组成。
相位调谐在此类传动中的应用旨在通过精确控制各部件间的相对位置和运动关系,实现动态性能优化和振动噪声降低。
直齿行星齿轮传动的基本工作原理在于各个行星齿轮同时绕自身轴线转动并沿公共轨道绕太阳轮公转,从而实现力矩和速度的高效传递和放大缩小。
为了深入研究相位调谐对直齿行星齿轮传动动力学特性的影响,首先需要建立相应的动力学数学模型。
该模型通常包括以下几个关键部分:几何模型:明确各齿轮的几何尺寸、啮合关系以及初始相位角,这些参数对于分析传动比、接触力分布以及动态响应至关重要。
刚柔耦合机器人力学特性分析与优化

刚柔耦合机器人力学特性分析与优化机器人力学一直是科学家们研究的热门领域之一,而刚柔耦合机器人则是在传统刚性机器人的基础上,引入了柔性元件,使得机器人在灵活性和精准性方面有了更好的平衡。
本文将从机器人力学特性的角度出发,对刚柔耦合机器人进行分析与优化。
刚柔耦合机器人力学特性的分析是研究刚柔耦合机器人的重要课题之一。
首先,我们需要了解刚柔耦合机器人的基本结构和工作原理。
刚柔耦合机器人一般由刚性链和柔性链组成,刚性链由刚性连接件组成,可以提供刚性运动;柔性链由柔性连接件组成,可以提供柔性运动。
通过刚柔耦合机构的设计,可以将刚性链和柔性链的力学特性相结合,从而提高机器人的适应性和灵活性。
刚柔耦合机器人的力学特性主要包括刚性特性和柔性特性。
刚性特性是指机器人在刚性链中的刚性运动特性,主要包括位置精确性、刚度和载荷能力等。
位置精确性是指机器人在执行任务时的位置精度,即机器人能否达到目标位置并保持稳定。
刚度是指机器人在负载作用下的变形能力,即机器人是否能够承受较大的负载而不发生过大的变形。
载荷能力是指机器人能够承受的最大负载,即机器人的工作能力。
柔性特性是指机器人在柔性链中的柔性运动特性,主要包括柔性度和柔性变形特性等。
柔性度是指机器人在执行任务时的柔性程度,即机器人能否适应不同的工作环境和工作要求。
柔性变形特性是指机器人在外界载荷作用下的变形情况,即机器人是否能够在外界载荷作用下保持稳定,并且能够恢复到原始形状。
刚柔耦合机器人的力学特性分析可以采用仿真模拟和实验验证相结合的方法。
通过建立刚柔耦合机器人的力学模型,可以对机器人的力学特性进行仿真模拟,从而得到机器人在不同工作条件下的运动特性和力学性能。
同时,还可以通过实验验证的方法,对机器人进行实际测试,验证仿真模拟结果的准确性和可靠性。
在对刚柔耦合机器人进行力学特性分析的基础上,还可以通过优化设计来改善机器人的力学特性。
优化设计可以根据机器人的具体需求和工作条件,对机器人的结构参数进行调整和优化,从而提高机器人的力学性能和工作能力。
刚柔耦合车辆动力学动态响应分析

刚柔耦合车辆动力学动态响应分析∗张成功【摘要】为了分析弹性车体结构振动特性及对曲线通过能力的影响,用运多体动力学建模仿真软件SIMPACK分别建立某型动车组刚性动力学仿真模型和柔性车体与刚性走行部耦合动力学仿真模型,通过对两种模型的垂向和横向动力学动态响应进行比较和分析。
结果表明,刚柔耦合模型车体振动加速度均方值( RMS)和Sperling指标均较多刚体模型大,曲线通过能力减小。
%In order to analyze the vibration characteristics of the elastic body and the influence of the vibration response and curving performance of the frame and wheels, The dynamic simulation models of a certain type of EMU about the rigid and the coupling of a flexible body and the rigid running gear are established by the multi-body dynamics simulation software SIM-PACK. After comparing and analyzing the vertical and lateral dynamics performance of the two models, the result is showed that rigid-flexible coupling model vehicle acceleration mean square ( RMS) and Sperling indicators are relatively large rigid body model, and also curving performance has been reduced.【期刊名称】《机械研究与应用》【年(卷),期】2016(029)002【总页数】3页(P12-14)【关键词】耦合模型;垂向与横向;曲线性能【作者】张成功【作者单位】兰州交通大学机电工程学院,甘肃兰州 730070【正文语种】中文【中图分类】TH132.41高速车辆车体的轻量化能够有效的降低轮轨之间的作用力,减少制造费用,节约能源,为了实现车体轻量化目标,中空铝合金或轻质不锈钢等材料被广泛的应用到车体的制造中,但是车体的轻量化往往引起了车体振动的变化,旅客乘坐舒适性有所下降[1];再者,随运行速度的不断提高,车辆运行的平稳性、舒适性和安全性也受到了一定的影响[2-4];所以,轨道车辆随着高速化和轻量化的快速发展,将车体考虑成刚性模型已经不能满足研究和分析车体动力学的需求,而考虑车体弹性变形的柔性车体模型将对车体振动的仿真研究更加准确和符合实际。
NW型直齿行星传动的动力学建模与固有特性分析

N W 型行星传动进行建模 的做法尚待完善. G 由于双 联行星轮结构 的引人 , W 型行星传动的动力学特l N 生 必然与 N W 型传动有所不 同. G 为明晰该类传动的动
通 讯作 者 :张
俊 ,zagjn j. u n hn u @t e . . u d c
_
天
津
大
学
学
Ab t a t An a a y ia r n l t n lr t to a ・ o p i g d n m i o e sd v l p d t v l a e t e i h r n h r sr c : n l tc l a s a i a -o a i n l u l y a cm d l t o - ・ c n wa e eo e e au t e e tc a - o h n - a t rsi so W p rp a e a y g a n t By d r n h ip a e n e a i n hi sb t e n g a s a d c r ir t e c e itc f N s u l n t r e ru i . e i g t e d s l c me tr l t s p ew e e r n a re , h vi o g v r i g d fe e t le u t n r b a n d Th o u i n t s o i t d e g n a u r blm e o n t a e u n o e n n i r n i q a i swe e o t i e . e s l t o a s c a e i e v l e p o e l d t aur lf q e — a o o
齿轮系统刚柔耦合动力学建模与仿真研究

齿轮系统刚柔耦合动力学建模与仿真研究
(军械工程学院 火炮工程系 , 河北 石家庄 050003) 王 炎 (武汉军械士官学校 , 湖北 武汉 430000) 马吉胜 蒙 刚 谢正军
为清晰提取齿轮啮合振动的频率信息 ,采用二级 齿轮传动模型获得箱体表面振动加速度信号 。在主动 齿轮转速 120r/ min ,被动齿轮负载 300N·m ,其余齿轮 空载的工况下测得到箱体表面 4 050 节点振动加速度
第 33 卷 第 4 期 齿轮系统刚柔耦合动力学建模与仿真研究 3 5
信号如图 9 所示 。对加速度信号做傅立叶变换 ,频域 曲线如图 10 所示 。
采用 如 图 11 的 实 验 方 案[11] , 在 主 动 齿 轮 转 速 120r/ min ,被动齿轮负载 300N·m 的工况下测量了箱体 表面振动加速度信号 。加速度时域图和功率谱图如图 12 所示 。
图 9 4 050 节点处加速度时域曲线
图 3 传动箱多刚体模型
3. 2 刚柔耦合模型的建立 3. 2. 1 柔性文件的生成 以箱体的柔性化过程为 例 ,首先对箱体的实体模型进行修正 ,去除与仿真无关 的螺栓 、螺孔 、倒角等 ,然后在 Partran 中对箱体划分网 格 。提交分析后将所得到的 3 . dbf 文件导入到 Virtu2 al . Lab ,在 Virtual . Lab Motion \ Flexible Body Design 模 块中 ,于柔性体与其他部件铰接处定义 spider 网格 ,并 在 spider 网格中心增加新的节点 。spider 网格的作用 是将作用于约束副上的作用力 ,通过刚性梁分配到柔 性体的节点上 ,以避免柔性体上应力集中 。模型类型 如表 2 所示 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
106
机
械
工
程
学
报
第 50 卷第 15 期期
运动微分方程将有所改变。 1.3 内齿圈运动微分方程 图 2 所示为弹性内齿圈微元段的受力示意图。 其中,定义 u 、 w 分别为齿圈微元段的切向和径向 位移; N11 、 Q13 、 M 11 分别为内齿圈微元段截面所 受的轴向力、剪切力以及弯矩; Ft 、 Fr 分别为齿圈 微元段所受的切向和径向载荷。
图1
行星传动刚柔耦合动力学模型
图 1 中,系杆随动坐标系 Oxy 的原点 O 取为系 杆的理论安装中心,其 x 轴指向行星轮 1 的平衡位 置,且以系杆理论角速度 c 绕原点 O 匀速转动。不 失一般性,设定初始时刻 x 轴恰好通过行星轮 1 的 质心。各构件连体坐标系 Oi xi yi ( i c,s,1, 2, , N ;N 为均布行星轮的数目 ) 的原点取各自质心且与 Oxy 平行。 ksn 、 krn 分别为太阳轮与行星轮及行星轮与 kij 为太阳轮和系 内齿圈的啮合刚度( n 1, 2, , N ); 杆的支承刚度( i c,s , j x, y, u ); kp n 为行星轮支 n 为第 n 个行星轮的理论位 承刚度( n 1, 2, , N ); 置与 x 轴正向的夹角( n 2π(n 1) / N ); ( xi , yi , ui ) 为 太 阳 轮 、 系 杆 及 各 行 星 轮 的 位 移 ( ui ri i ;
Frn krn rn
对位移。由二者之间的变形协调条件可知
(6)
rn 为行星轮和内齿圈沿理论啮合线方向的相 式中,
rn u ( , t ) n
(7)
n xn sin rn yn cos rn un , rn r n , 式中,
声抑制等多个方面。这其中,动力学建模和固有特 性分析是进行后续动力性能研究及减振降噪的 基础。 按建模方法的不同,大致可将行星传动的动力 学模型分为集中参数模型、有限元模型和刚柔耦合 [1] 模型三类 。其中,集中参数模型因建模简单、求 [2] 解容易等优点而被广泛采用。LIN 等 通过建立计 入构件平移、扭转运动的集中参数模型获得了直齿 行星传动固有特性的解析表达式,并将系统的自由
i c,s,1, 2, , N )。其中, ri 为构件的回转半径。若
i c ,则为行星轮轴心到系杆中心的距离;若
1
1.1
行星传动动力学模型
建模假设
i s,1, 2, , N ,则为太阳轮以及各行星轮的基圆半 其径向位移 w( , t ) 径。u ( , t ) 为内齿圈的周向位移,
(1. 安徽工业大学机械工程学院 马鞍山 243032; 2. 天津大学机械工程学院 天津 300072)
摘要:采用动态子结构法建立计入内齿圈柔性的行星传动刚柔耦合动力学模型,将内齿圈视为弹性连续体,导出内外约束条 件下的运动微分方程,并将其与刚体构件的集中参数方程相结合,构建出系统的运动微分方程。基于所建模型,进行柔性齿 圈直齿行星齿轮系的自由振动分析和相关试验验证。 理论分析揭示出此类系统的振型可归结为 4 类: 中心构件扭转振动模式、 中心构件平移振动模式、行星轮振动模式和内齿圈振动模式,并给出每类振动模式的特征和降阶计算公式。数值仿真表明, 内齿圈柔性使系统低阶固有频率降低,且新呈现的内齿圈振动模式对应的固有频率位于整个系统固有频率的中低频段,故在 后续行星轮系的动态设计中应计及齿圈柔性的影响。振动试验则表明,内齿圈柔性对系统振动特性存在一定影响,除啮频激 励和箱体结构共振外,行星传动中还存在低阶谐振现象;对于中低速工况下且太阳轮浮动的行星传动而言,减小齿圈柔性有 利于降低系统振动。 关键词:行星传动;动力学建模;固有特性;刚柔耦合模型 中图分类号:TH132
Abstract:A discrete-continuum dynamic model for spur planetary gear trains (SPGTs) is developed by using the sub-structure synthesis method. By combining the equation of motion of an elastic continuum ring subjected to internal and external constraints with lumped parameter equations of motion of rigid bodies, the system governing equations are obtained. A modal analysis is conducted to reveal the modal properties of spur planetary gear trains. The free vibration characteristics of the system are classified into four distinct modes: rotational, translational, planet and ring. For each vibration mode, the properties and reduced-order formulae are derived. The effect of ring elasticity on system natural characteristics is then discussed. The simulation results show that the elastic ring gear decreases the lower order natural frequencies and introduces a new vibration mode i.e. the ring mode. And the natural frequencies of the ring mode locate at the middle and low region of the overall system frequencies. The simulation indicates that the elasticity of ring gear must be considered during the dynamic design of planetary gear trains. A back-to-back test rig is constructed and some vibration tests are conducted. The experimental results agreed well with the theoretical and numerical analysis. Key words:planetary gear trains;dynamic modeling;natural frequency;discrete-continuum model
0
前言*
行星齿轮传动的振动和噪声是影响系统可靠 性、寿命及操作环境的关键因素。围绕该类传动的 动力学问题,学术界开展了大量研究,内容涉及动 力学建模、固有特性分析、动态响应求解、振动噪
* 国 家 自 然 科 学 基 金 (50905122, 51375013) 和 安 徽 省 自 然 科 学 基 金 (1208085ME64)资助项目。20131012 收到初稿,20140522 收到修改稿
Vibration Analysis of Planetary Gear Trains Based on a Discrete-continuum Dynamic Model
ZHANG Jun1 LIU Xianzeng1 JIAO Yang1 SONG Yimin2
(1. School of Mechanical Engineering, Anhui University of Technology, Ma’anshan 243032; 2. School of Mechanical Engineering, Tianjin University, Tianjin 300072)
第 50 卷第 15 期 2014 年 8 月
机
械
工 程
学
报
Vol.50 Aug.
No.15 2014
JOURNAL OF MECHANICAL ENGINEERING
DOI:10.3901/JME.2014.15.104
基于刚柔耦合模型的行星传动固有特性分析*
张 俊1 刘先增 1 焦 阳1 宋轶民 2
为方便建模并不失一般性,做如下假设。 (1) 计入内齿圈的柔性,将其简化为具有等效 半径的矩形截面弹性圆环,且满足不可延展条件。 (2) 与内齿圈相比,太阳轮、行星轮及系杆的 柔性较小,故将其视为刚体,并设定各行星轮均布 安装且质量、转动惯量分别相等。
可由不可延展条件获得。为方便表达,下文如不做 特别说明,一律将 u ( , t ) 简写为 u 。为清晰计,图 1 中未示出弹性内齿圈的支承刚度,其刚度处理详见 后文。 太阳轮、系杆运动微分方程的推导与文献[14] 中集中参数模型相同,篇幅所限此处不再赘述。相 反,由于计入了内齿圈的弹性,内齿圈和行星轮的
Байду номын сангаас
月 2014 年 8 月
张
俊等:基于刚柔耦合模型的行星传动固有特性分析
105
振动归纳为扭转、平移和行星轮三种模式。采用类 [3] 似建模方法,学者们进一步研究了参数灵敏度 、 [4] [5] [6] 模态跃迁 、参数稳定性 、非均布行星轮系统 、 [7] 复合行星轮系 及斜齿、人字齿、锥齿行星轮系模 [8-10] 态 等问题。 上述研究所采用的集中参数模型,均将轮系中 各构件视为刚体,建模时仅计及轮齿啮合变形和构 件支承变形。但理论分析和试验研究均表明,在某 些重要场合内齿圈柔性对系统动态特性的影响不能 [11-14] [12] KAHRAMAN 等 运用有限元法建立了 忽略 。 行星轮系的准静态受力模型,分析了内齿圈柔性对 齿轮应力和行星轮载荷分配的影响。 采用类似手段, [13] KAHRAMAN 等 又进一步研究了内齿圈柔性对 系统动态特性的影响。文献[12-13]的研究表明,减 小齿圈厚度有助于补偿因齿轮和系杆制造安装误差 引起的非均载效应,且在内齿圈浮动或采用薄缘结 构的工况下, 其柔性对系统动态特性具有重要影响。 由于有限元模型的建立和求解均较为费时,故 不适用于需要反复迭代的初始设计阶段。鉴于此, [14] 张俊等 借鉴有限单元思想,将连续内齿圈离散为 若干由虚拟弹簧连接的刚性齿圈段,建立了计入内 齿圈柔性的行星传动集中参数模型,并依据该模型 进行了直齿行星系统的固有特性分析,其仿真结果 与文献 [15-16] 提出的刚柔耦合模型的分析结果相 符。需要指出的是,采用该模型进行系统固有特性 性分析时,需要先借助虚拟样机技术将内齿圈柔性 拟合成具有等效刚度的径/周向弹簧, 此举在一定程 度上增加了建模工作量。 针对上述问题,拟采用动态子结构思想,将内 齿圈视为环状弹性连续体,而将其他构件仍视为刚 体,分别采用弹性力学方法和集中参数法建立两类 构件的运动微分方程,进而根据构件间的运动和约 束关系,建立传动系统的刚柔耦合动力学模型。在 此基础上,进一步开展系统固有特性研究,希冀揭 示内齿圈柔性对系统固有特性的影响规律,从而为 后续动态设计与性能优化提供理论依据。