EPSON_高精度实时时钟模块
爱普生(EPSON)实时时钟模块RA8803SA规格书
DTCXO,
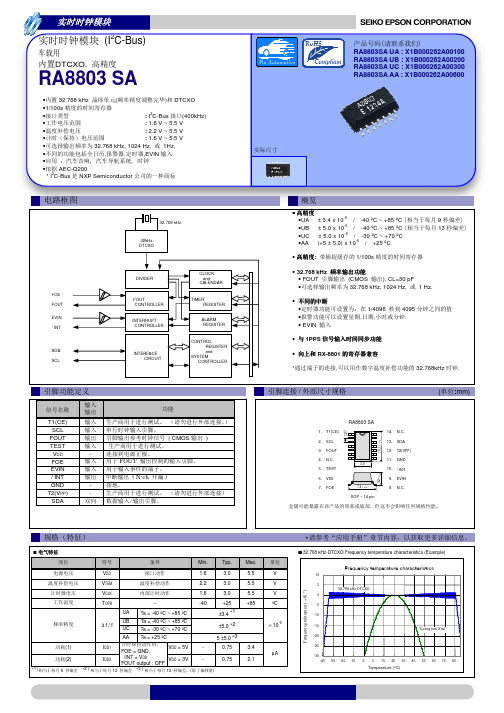
RA8803 SA
• 32.768 kHz
(
) DTCXO
•1/100s •
: I2C-Bus (400kHz)
•
: 1.6 V ~ 5.5 V
•
: 2.2 V ~ 5.5 V
•
: 1.6 V ~ 5.5 V
•
32.768 kHz, 1024 Hz, 1Hz.
•
,
,
,EVIN
FOE FOUT EVIN / INT
SDA SCL
32.768 kHz
32kHz DTCXO
DIVIDER
FOUT CONTROLLER
INTERRUPT CONTROLLER
INTERFACE CIRCUIT
CLOCK and
CALENDAR
TIMER REGISTER
ALARM REGISTER
5 32.768 kHz DTCXO
0
-5
-10
-15 Tuning fork X'tal
-20
-25
-30 -45 -35 -25 -15 -5 5 15 25 35 45 55 65 75 85 Temperature (ºC)
推进环境管理体系 符合国际标准
在环境管理体系的运行方面,使用 ISO14001 国际环境标准,通过“计 划-实施-检查-验证(PDCA)的循环来实现持续改进。公司位于日本和 海外的主要制造基地已取得了 ISO14001 资格认证。
CONTROL REGISTER and
SYSTEM CONTROLLER
T1(CE)
SCL
FOUT
TEST
RX-8025T规格书(中文)
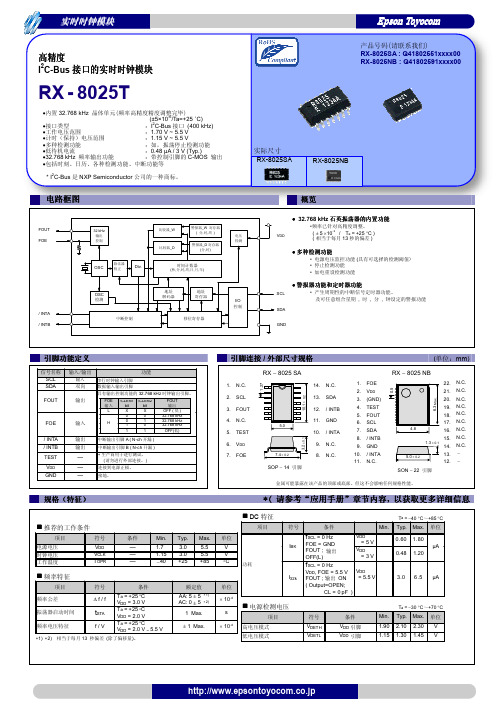
• 多种检测功能 • 电源电压监控功能 (具有可选择的检测阈值)
• 停止检测功能
• 加电重设检测功能
• 警报器功能和定时器功能
SCL
• 产生周期性的中断信号定时器功能。
及可任意组合星期 , 时 , 分 , 钟设定的警报功能
SDA
GND
引脚功能定义
信号名称 SCL SDA
FOUT
FOE
/ INTA / INTB TEST
:1.15 V ~ 5.5 V
•多种检测功能
:如,振荡停止检测功能
•低待机电流
:0.48 µA / 3 V (Typ.)
•32.768 kHz 频率输出功能
:带控制引脚的 C-MOS 输出
•包括时刻、日历、各种检测功能、中断功能等
* I2C-Bus 是 NXP Semiconductor 公司的一种商标。
警报器_D 寄存器 (分,时)
时间计数器 (秒,分,时,周,日,月,年)
电压 检测
OSC 检测
中断控制
地址 解码器
地址 寄存器
移位寄存器
I/O 控制
概览
• 32.768 kHz 石英振荡器的内置功能 •频率已针对高精度调整。
VDD
( ± 5 ×10−6 / Ta = +25 °C ) ( 相当于每月 13 秒的偏差 )
0.5 6.3 Max.
RX − 8025 NB
22. N.C. 21. N.C.
4.8 5.0 ± 0.2
20. 19. ห้องสมุดไป่ตู้8. 17. 16. 15.
1.3 ± 0.1
14. 13. 12.
N.C. N.C. N.C. N.C. N.C. N.C. N.C.
DS3231高精度时钟模块程序
模块参数:1.尺寸:38mm(长)*22mm(宽)*14mm(高)2.重量:8g3.工作电压:3.3--5.5V4.时钟芯片:高精度时钟芯片DS32315.时钟精度:0-40℃范围内,精度2ppm,年误差约1分钟6.带2个日历闹钟7.可编程方波输出8.实时时钟产生秒、分、时、星期、日期、月和年计时,并提供有效期到2100年的闰年补偿9.芯片内部自带温度传感器,精度为±3℃10.存储芯片:AT24C32(存储容量32K)11.IIC总线接口,最高传输速度400KHz(工作电压为5V时)12.可级联其它IIC设备,24C32地址可通过短路A0/A1/A2修改,默认地址为0x5713.带可充电电池LIR2032,保证系统断电后,时钟任然正常走动接线说明,以Arduino uno r3为例:SCL→A5SDA→A4VCC→5VGND→GND代码部分:#include <reg51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit SDA=P3^6; //模拟I2C数据传送位SDAsbit SCL=P3^7; //模拟I2C时钟控制位SCLsbit INT=P3^2;sbit RESET=P3^3;sbit led0=P1^0;sbit led1=P1^1;sbit led2=P1^2;sbit led3=P1^3;sbit led4=P1^4;sbit led5=P1^5;sbit led6=P1^6;sbit led7=P1^7;bit ack; //应答标志位#define DS3231_WriteAddress 0xD0 //器件写地址#define DS3231_ReadAddress 0xD1 //器件读地址#define DS3231_SECOND 0x00 //秒#define DS3231_MINUTE 0x01 //分#define DS3231_HOUR 0x02 //时#define DS3231_WEEK 0x03 //星期#define DS3231_DAY 0x04 //日#define DS3231_MONTH 0x05 //月#define DS3231_YEAR 0x06 //年//闹铃1#define DS3231_SALARM1ECOND 0x07 //秒#define DS3231_ALARM1MINUTE 0x08 //分#define DS3231_ALARM1HOUR 0x09 //时#define DS3231_ALARM1WEEK 0x0A //星期/日//闹铃2#define DS3231_ALARM2MINUTE 0x0b //分#define DS3231_ALARM2HOUR 0x0c //时#define DS3231_ALARM2WEEK 0x0d //星期/日#define DS3231_CONTROL 0x0e //控制寄存器#define DS3231_STATUS 0x0f //状态寄存器#define BSY 2 //忙#define OSF 7 //振荡器停止标志#define DS3231_XTAL 0x10 //晶体老化寄存器#define DS3231_TEMPERATUREH 0x11 //温度寄存器高字节(8位)#define DS3231_TEMPERATUREL 0x12 //温度寄存器低字节(高2位)uchar code dis_code[11]={0xc0,0xf9,0xa4,0xb0, // 0,1,2,30x99,0x92,0x82,0xf8,0x80,0x90, 0xff}; // 4,5,6,7,8,9,offuchar data dis_buf[8];uchar data dis_index;uchar data dis_digit;uchar BCD2HEX(uchar val) //BCD转换为Byte{uchar temp;temp=val&0x0f;val>>=4;val&=0x0f;val*=10;temp+=val;return temp;}uchar HEX2BCD(uchar val) //B码转换为BCD码{uchar i,j,k;i=val/10;j=val;k=j+(i<<4);return k;}void delayus(uint us){while (us--);}void Start_I2C(){SDA=1; //发送起始条件的数据信号delayus(1);SCL=1;delayus(5); //起始条件建立时间大于4.7us,延时SDA=0; //发送起始信号delayus(5); // 起始条件锁定时间大于4μsSCL=0; //钳住I2C总线,准备发送或接收数据delayus(2);}void Stop_I2C(){SDA=0; //发送结束条件的数据信号delayus(1); //发送结束条件的时钟信号SCL=1; //结束条件建立时间大于4usdelayus(5);SDA=1; //发送I2C总线结束信号delayus(4);}void SendByte(uchar c){uchar BitCnt;for(BitCnt=0;BitCnt<8;BitCnt++) //要传送的数据长度为8位 {if((c<<BitCnt)&0x80)SDA=1;//判断发送位elseSDA=0;delayus(1);SCL=1;//置时钟线为高,通知被控器开始接收数据位delayus(5); //保证时钟高电平周期大于4μsSCL=0;}delayus(2);SDA=1;//8位发送完后释放数据线,准备接收应答位delayus(2);SCL=1;delayus(3);if(SDA==1)ack=0;elseack=1;//判断是否接收到应答信号SCL=0;delayus(2);}uchar RcvByte(){uchar retc;uchar BitCnt;retc=0;SDA=1; //置数据线为输入方式for(BitCnt=0;BitCnt<8;BitCnt++){delayus(1);SCL=0; //置时钟线为低,准备接收数据位delayus(5); //时钟低电平周期大于4.7μsSCL=1; //置时钟线为高使数据线上数据有效delayus(3);retc=retc<<1;if(SDA==1)retc=retc+1; //读数据位,接收的数据位放入retc中delayus(2);}SCL=0;delayus(2);return(retc);}void Ack_I2C(bit a){if(a==0)SDA=0; //在此发出应答或非应答信号 elseSDA=1;delayus(3);SCL=1;delayus(5); //时钟低电平周期大于4μsSCL=0; //清时钟线,钳住I2C总线以便继续接收delayus(2);}uchar write_byte(uchar addr, uchar write_data){Start_I2C();SendByte(DS3231_WriteAddress);if (ack == 0)return 0;SendByte(addr);if (ack == 0)return 0;SendByte(write_data);if (ack == 0)return 0;Stop_I2C();delayus(10);return 1;}uchar read_current(){uchar read_data;Start_I2C();SendByte(DS3231_ReadAddress);if(ack==0)return(0);read_data = RcvByte();Ack_I2C(1);Stop_I2C();return read_data;}uchar read_random(uchar random_addr) {Start_I2C();SendByte(DS3231_WriteAddress);if(ack==0)return(0);SendByte(random_addr);if(ack==0)return(0);return(read_current());}void ModifyTime(uchar yea,uchar mon,uchar da,uchar hou,uchar min,uchar sec) {uchar temp=0;temp=HEX2BCD(yea);write_byte(DS3231_YEAR,temp); //修改年temp=HEX2BCD(mon);write_byte(DS3231_MONTH,temp); //修改月temp=HEX2BCD(da);write_byte(DS3231_DAY,temp); //修改日temp=HEX2BCD(hou);write_byte(DS3231_HOUR,temp); //修改时temp=HEX2BCD(min);write_byte(DS3231_MINUTE,temp); //修改分temp=HEX2BCD(sec);write_byte(DS3231_SECOND,temp); //修改秒}void TimeDisplay(uchar Dhour,uchar Dmin,uchar Dsec){dis_buf[7]=dis_code[Dhour / 10]; // 时十位dis_buf[6]=dis_code[Dhour % 10]; // 时个位dis_buf[4]=dis_code[Dmin / 10]; // 分十位dis_buf[3]=dis_code[Dmin % 10]; // 分个位dis_buf[1]=dis_code[Dsec / 10]; // 秒十位dis_buf[0]=dis_code[Dsec % 10]; // 秒个位dis_buf[2]=0xbf; // 显示"-"dis_buf[5]=0xbf;}void DateDisplay(uchar Dyear,uchar Dmonth,uchar Dday){dis_buf[7]=dis_code[Dyear / 10]; // 年十位dis_buf[6]=dis_code[Dyear % 10]; // 年个位dis_buf[4]=dis_code[Dmonth / 10]; // 月十位dis_buf[3]=dis_code[Dmonth % 10]; // 月个位dis_buf[1]=dis_code[Dday / 10]; // 天十位dis_buf[0]=dis_code[Dday % 10]; // 天个位dis_buf[2]=0xbf; // 显示"-"dis_buf[5]=0xbf;}void get_show_time(void){uchar Htemp1,Htemp2,Mtemp1,Mtemp2,Stemp1,Stemp2;Htemp1=read_random(DS3231_HOUR); //时 24小时制Htemp1&=0x3f;Htemp2=BCD2HEX(Htemp1);Mtemp1=read_random(DS3231_MINUTE); //分Mtemp2=BCD2HEX(Mtemp1);Stemp1=read_random(DS3231_SECOND); //秒Stemp2=BCD2HEX(Stemp1);TimeDisplay(Htemp2,Mtemp2,Stemp2);}void get_show_date(void){uchar Ytemp1,Ytemp2,Mtemp1,Mtemp2,Dtemp1,Dtemp2;Ytemp1=read_random(DS3231_YEAR); //年Ytemp2=BCD2HEX(Ytemp1);Mtemp1=read_random(DS3231_MONTH); //月Mtemp2=BCD2HEX(Mtemp1);Dtemp1=read_random(DS3231_DAY); //日Dtemp2=BCD2HEX(Dtemp1);DateDisplay(Ytemp2,Mtemp2,Dtemp2);}void get_show_Temperature(void){uchar Ttemp1,Ttemp2,Ttemp3,Ttemp4;Ttemp1=read_random(DS3231_TEMPERATUREH); //温度高字节 Ttemp2=BCD2HEX(Ttemp1);Ttemp3=read_random(DS3231_TEMPERATUREL); //温度低字节Ttemp4=BCD2HEX(Ttemp3);DateDisplay(0,Ttemp2,Ttemp4);}void timer0() interrupt 1{TH0=0xFC;TL0=0x17;P2=0xff; // 先关闭所有数码管P0=dis_buf[dis_index]; // 显示代码传送到P0口P2=dis_digit;if (dis_digit & 0x80)dis_digit=(dis_digit << 1) | 0x1;elsedis_digit=(dis_digit << 1);dis_index++;dis_index&=0x07; // 8个数码管全部扫描完一遍之后,再回到第一个开始下一次扫描}void main(){uint ii = 0;RESET=0x1; //DS3231复位操作,正常操作下不需要每次都复位delayus(5000);led0=0;led1=0;led2=0;led3=0;led4=0;P0=0xff;P2=0xff;dis_digit=0xfe;dis_index=0;TimeDisplay(12, 5, 18);TMOD=0x11; // 定时器0, 1工作模式1, 16位定时方式 TH0=0xFC;TL0=0x17;TCON=0x01;IE=0x82; // 使能timer0,1 中断TR0=1;if (write_byte(DS3231_CONTROL, 0x1C) == 0)led0=1;if (write_byte(DS3231_STATUS, 0x00) == 0)led1=1;ModifyTime(10,6,13,15,30,00); //初始化时钟,2010/6/13,15/30/00//小时采用24小时制while(1){//get_show_date(); //显示日期//get_show_Temperature(); //显示温度get_show_time(); //显示时间delayus(50000);}}。
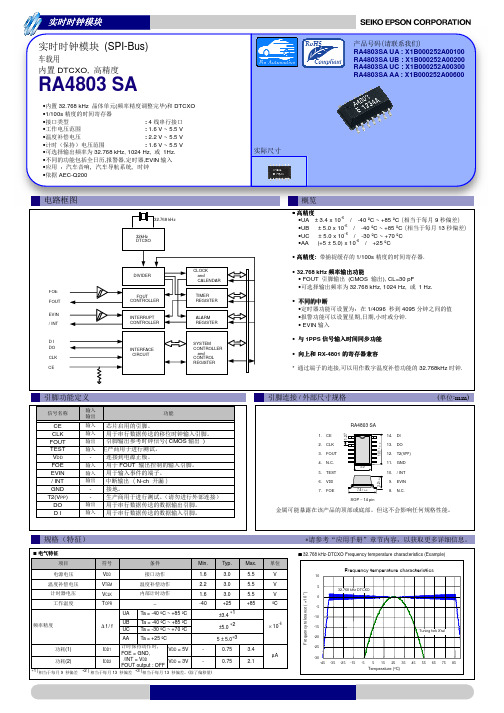
爱普生(EPSON)实时时钟模块RA4803SA规格书
DIVIDER
FOUT CONTROLLER
INTERRUPT CONTROLLER
INTERFACE CIRCUIT
CLOCK and CALENDAR
TIMER REGISTER
ALARM REGISTER
SYSTEM CONTROLLER
and CONTROL REGISTER
• •UA •UB •UC •AA
± 3.4 x 10-6 / -40 ºC ~ +85 ºC 商
± 5.0 x 10-6 / -40 ºC ~ +85 ºC 商 ± 5.0 x 10-6 / -30 ºC ~ +70 ºC (+5 ± 5.0) x 10-6 / +25 ºC
9
器
13
器
•
:
1/100s
●为汽车行驶安全方面的应用(引擎控制单元、气囊、电子稳定程序控制系统)。
注意事项
·本材料如有变更,恕不另行通知。量产设计时请确认最新信息。 ·未经 Seiko Epson 公司书面授权,禁止以任何形式或任何方式复制或者发布本材料中任何部分的信息内容。 ·本材料中的书面信息、应用电路、编程、使用等内容仅供参考。Seiko Epson 公司对第三方专利或版权的侵权行为不负有任何责任。本材料
0
-5
-10
-15 Tuning fork X'tal
-20
-25
-30 -45 -35 -25 -15 -5 5 15 25 35 45 55 65 75 85 Temperature (ºC)
推进环境管理体系 符合国际标准
在环境管理体系的运行方面,使用 ISO14001 国际环境标准,通过“计 划-实施-检查-验证(PDCA)的循环来实现持续改进。公司位于日本和 海外的主要制造基地已取得了 ISO14001 资格认证。
DS3231高精度时钟模块程序
模块参数:1.尺寸:38mm(长)*22mm(宽)*14mm(高)2.重量:8g3.工作电压:3.3--5.5V4.时钟芯片:高精度时钟芯片DS32315.时钟精度:0-40℃范围内,精度2ppm,年误差约1分钟6.带2个日历闹钟7.可编程方波输出8.实时时钟产生秒、分、时、星期、日期、月和年计时,并提供有效期到2100年的闰年补偿9.芯片内部自带温度传感器,精度为±3℃10.存储芯片:AT24C32(存储容量32K)11.IIC总线接口,最高传输速度400KHz(工作电压为5V时)12.可级联其它IIC设备,24C32地址可通过短路A0/A1/A2修改,默认地址为0x5713.带可充电电池LIR2032,保证系统断电后,时钟任然正常走动接线说明,以Arduino uno r3为例:SCL→A5SDA→A4VCC→5VGND→GND代码部分:#include <reg51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit SDA=P3^6; //模拟I2C数据传送位SDAsbit SCL=P3^7; //模拟I2C时钟控制位SCLsbit INT=P3^2;sbit RESET=P3^3;sbit led0=P1^0;sbit led1=P1^1;sbit led2=P1^2;sbit led3=P1^3;sbit led4=P1^4;sbit led5=P1^5;sbit led6=P1^6;sbit led7=P1^7;bit ack; //应答标志位#define DS3231_WriteAddress 0xD0 //器件写地址#define DS3231_ReadAddress 0xD1 //器件读地址#define DS3231_SECOND 0x00 //秒#define DS3231_MINUTE 0x01 //分#define DS3231_HOUR 0x02 //时#define DS3231_WEEK 0x03 //星期#define DS3231_DAY 0x04 //日#define DS3231_MONTH 0x05 //月#define DS3231_YEAR 0x06 //年//闹铃1#define DS3231_SALARM1ECOND 0x07 //秒#define DS3231_ALARM1MINUTE 0x08 //分#define DS3231_ALARM1HOUR 0x09 //时#define DS3231_ALARM1WEEK 0x0A //星期/日//闹铃2#define DS3231_ALARM2MINUTE 0x0b //分#define DS3231_ALARM2HOUR 0x0c //时#define DS3231_ALARM2WEEK 0x0d //星期/日#define DS3231_CONTROL 0x0e //控制寄存器#define DS3231_STATUS 0x0f //状态寄存器#define BSY 2 //忙#define OSF 7 //振荡器停止标志#define DS3231_XTAL 0x10 //晶体老化寄存器#define DS3231_TEMPERATUREH 0x11 //温度寄存器高字节(8位)#define DS3231_TEMPERATUREL 0x12 //温度寄存器低字节(高2位)uchar code dis_code[11]={0xc0,0xf9,0xa4,0xb0, // 0,1,2,30x99,0x92,0x82,0xf8,0x80,0x90, 0xff}; // 4,5,6,7,8,9,off uchar data dis_buf[8];uchar data dis_index;uchar data dis_digit;uchar BCD2HEX(uchar val) //BCD转换为Byte{uchar temp;temp=val&0x0f;val>>=4;val&=0x0f;val*=10;temp+=val;return temp;uchar HEX2BCD(uchar val) //B码转换为BCD码{uchar i,j,k;i=val/10;j=val;k=j+(i<<4);return k;}void delayus(uint us){while (us--);}void Start_I2C(){SDA=1; //发送起始条件的数据信号delayus(1);SCL=1;delayus(5); //起始条件建立时间大于4.7us,延时SDA=0; //发送起始信号delayus(5); // 起始条件锁定时间大于4μsSCL=0; //钳住I2C总线,准备发送或接收数据 delayus(2);}void Stop_I2C(){SDA=0; //发送结束条件的数据信号delayus(1); //发送结束条件的时钟信号SCL=1; //结束条件建立时间大于4usdelayus(5);SDA=1; //发送I2C总线结束信号delayus(4);}void SendByte(uchar c){uchar BitCnt;for(BitCnt=0;BitCnt<8;BitCnt++) //要传送的数据长度为8位{if((c<<BitCnt)&0x80)SDA=1; //判断发送位 elseSDA=0;delayus(1);SCL=1; //置时钟线为高,通知被控器开始接收数据位delayus(5); //保证时钟高电平周期大于4μsSCL=0;}delayus(2);SDA=1; //8位发送完后释放数据线,准备接收应答位delayus(2);SCL=1;delayus(3);if(SDA==1)ack=0;elseack=1; //判断是否接收到应答信号SCL=0;delayus(2);}uchar RcvByte(){uchar retc;uchar BitCnt;retc=0;SDA=1; //置数据线为输入方式for(BitCnt=0;BitCnt<8;BitCnt++){delayus(1);SCL=0; //置时钟线为低,准备接收数据位delayus(5); //时钟低电平周期大于4.7μsSCL=1; //置时钟线为高使数据线上数据有效delayus(3);retc=retc<<1;if(SDA==1)retc=retc+1; //读数据位,接收的数据位放入retc中 delayus(2);}SCL=0;delayus(2);return(retc);}void Ack_I2C(bit a){if(a==0)SDA=0; //在此发出应答或非应答信号elseSDA=1;delayus(3);SCL=1;delayus(5); //时钟低电平周期大于4μsSCL=0; //清时钟线,钳住I2C总线以便继续接收delayus(2);}uchar write_byte(uchar addr, uchar write_data){Start_I2C();SendByte(DS3231_WriteAddress);if (ack == 0)return 0;SendByte(addr);if (ack == 0)return 0;SendByte(write_data);if (ack == 0)return 0;Stop_I2C();delayus(10);return 1;}uchar read_current(){uchar read_data;Start_I2C();SendByte(DS3231_ReadAddress);if(ack==0)return(0);read_data = RcvByte();Ack_I2C(1);Stop_I2C();return read_data;}uchar read_random(uchar random_addr) {Start_I2C();SendByte(DS3231_WriteAddress);if(ack==0)return(0);SendByte(random_addr);if(ack==0)return(0);return(read_current());}void ModifyTime(uchar yea,uchar mon,uchar da,uchar hou,uchar min,uchar sec){uchar temp=0;temp=HEX2BCD(yea);write_byte(DS3231_YEAR,temp); //修改年temp=HEX2BCD(mon);write_byte(DS3231_MONTH,temp); //修改月temp=HEX2BCD(da);write_byte(DS3231_DAY,temp); //修改日temp=HEX2BCD(hou);write_byte(DS3231_HOUR,temp); //修改时temp=HEX2BCD(min);write_byte(DS3231_MINUTE,temp); //修改分temp=HEX2BCD(sec);write_byte(DS3231_SECOND,temp); //修改秒}void TimeDisplay(uchar Dhour,uchar Dmin,uchar Dsec){dis_buf[7]=dis_code[Dhour / 10]; // 时十位dis_buf[6]=dis_code[Dhour % 10]; // 时个位dis_buf[4]=dis_code[Dmin / 10]; // 分十位dis_buf[3]=dis_code[Dmin % 10]; // 分个位dis_buf[1]=dis_code[Dsec / 10]; // 秒十位dis_buf[0]=dis_code[Dsec % 10]; // 秒个位dis_buf[2]=0xbf; // 显示"-"dis_buf[5]=0xbf;}void DateDisplay(uchar Dyear,uchar Dmonth,uchar Dday){dis_buf[7]=dis_code[Dyear / 10]; // 年十位dis_buf[6]=dis_code[Dyear % 10]; // 年个位dis_buf[4]=dis_code[Dmonth / 10]; // 月十位dis_buf[3]=dis_code[Dmonth % 10]; // 月个位dis_buf[1]=dis_code[Dday / 10]; // 天十位dis_buf[0]=dis_code[Dday % 10]; // 天个位dis_buf[2]=0xbf; // 显示"-"dis_buf[5]=0xbf;}void get_show_time(void){uchar Htemp1,Htemp2,Mtemp1,Mtemp2,Stemp1,Stemp2;Htemp1=read_random(DS3231_HOUR); //时 24小时制Htemp1&=0x3f;Htemp2=BCD2HEX(Htemp1);Mtemp1=read_random(DS3231_MINUTE); //分Mtemp2=BCD2HEX(Mtemp1);Stemp1=read_random(DS3231_SECOND); //秒Stemp2=BCD2HEX(Stemp1);TimeDisplay(Htemp2,Mtemp2,Stemp2);}void get_show_date(void){uchar Ytemp1,Ytemp2,Mtemp1,Mtemp2,Dtemp1,Dtemp2;Ytemp1=read_random(DS3231_YEAR); //年Ytemp2=BCD2HEX(Ytemp1);Mtemp1=read_random(DS3231_MONTH); //月Mtemp2=BCD2HEX(Mtemp1);Dtemp1=read_random(DS3231_DAY); //日Dtemp2=BCD2HEX(Dtemp1);DateDisplay(Ytemp2,Mtemp2,Dtemp2);}void get_show_Temperature(void){uchar Ttemp1,Ttemp2,Ttemp3,Ttemp4;Ttemp1=read_random(DS3231_TEMPERATUREH); //温度高字节Ttemp2=BCD2HEX(Ttemp1);Ttemp3=read_random(DS3231_TEMPERATUREL); //温度低字节Ttemp4=BCD2HEX(Ttemp3);DateDisplay(0,Ttemp2,Ttemp4);}void timer0() interrupt 1{TH0=0xFC;TL0=0x17;P2=0xff; // 先关闭所有数码管P0=dis_buf[dis_index]; // 显示代码传送到P0口P2=dis_digit;if (dis_digit & 0x80)dis_digit=(dis_digit << 1) | 0x1;elsedis_digit=(dis_digit << 1);dis_index++;dis_index&=0x07; // 8个数码管全部扫描完一遍之后,再回到第一个开始下一次扫描}void main(){uint ii = 0;RESET=0x1; //DS3231复位操作,正常操作下不需要每次都复位delayus(5000);led0=0;led1=0;led2=0;led3=0;led4=0;P0=0xff;P2=0xff;dis_digit=0xfe;dis_index=0;TimeDisplay(12, 5, 18);TMOD=0x11; // 定时器0, 1工作模式1, 16位定时方式TH0=0xFC;TL0=0x17;TCON=0x01;IE=0x82; // 使能timer0,1 中断TR0=1;if (write_byte(DS3231_CONTROL, 0x1C) == 0)led0=1;if (write_byte(DS3231_STATUS, 0x00) == 0)led1=1;ModifyTime(10,6,13,15,30,00); //初始化时钟,2010/6/13,15/30/00//小时采用24小时制while(1){//get_show_date(); //显示日期//get_show_Temperature(); //显示温度get_show_time(); //显示时间delayus(50000);} }。
Seiko Epson RTC-4543SA SB实时时钟模块应用手册说明书

ETM09E-03Real Time Clock ModuleRTC-4543SA/SB•These products are intended for general use in electronic equipment. When using them in specific applications that require extremelyobtain permission from Seiko Epson in advance./ Space equipment (artificial satellites, rockets, etc.) / Transportation vehicles and related(automobiles, aircraft,Submarine transmitters / Power stations and related / Fire work equipment and securityequipment / traffic control equipment / and others requiring equivalent reliability.•All brands or product names mentioned herein are trademarks and/or registered trademarks of their respective.CONTENTS1. OVERVIEW (1)2. BLOCK DIAGRAM (1)3. PIN CONNECTIONS (2)4. PIN FUNCTIONS (2)5. ELECTRICAL CHARACTERISTICS (3)5-1.A BSOLUTE M AXIMUM R ATINGS (3)5-2.O PERATING C ONDITION (3)5-3.F REQUENCY C HARACTERISTICS (3)5-4.DC C HARACTERISTICS (3)5-5.AC C HARACTERISTICS (4)5-6.T IMING C HARTS (5)6. TIMER DATA ORGANIZATION (6)7. DESCRIPTION OF OPERATION (7)7-1.D ATA READS (7)7-2.D ATA WRITES (7)7-3.D ATA WRITES (D IVIDER R ESET) (8)7-4.FOUT OUTPUT AND 1H Z CARRIES (8)8. EXAMPLES OF EXTERNAL CIRCUITS (9)9. EXTERNAL DIMENSIONS (10)10. LAYOUT OF PACKAGE MARKINGS (10)11. REFERENCE DATA (11)12. APPLICATION NOTES (12)32-kHz Output Serial RTC ModuleRTC - 4543 SA/SBBuilt-in crystal permits operation without requiring adjustmentBuilt-in time counters (seconds, minutes, hours) and calendar counters (days, days of the week months, years)Operating voltage range: 2.5 V to 5.5 VSupply voltage detection voltage: 1.7 ±0.3 VLow current consumption: 1.0 µA/2.0 V (Max.)Automatic processing for leap yearsOutput selectable between 32.768 kHz/1 Hz1. OverviewThis module is a real-time clock with a serial interface and a built-in crystal oscillator. This module is also equipped with clock and calendar circuits, an automatic leap year compensation function, and a supply voltage detection function.In addition, this module has a 32.768 kHz/1 Hz selectable output function for hardware control that is independent of the RTC circuit.This module is available in a compact SOP 14-pin package (RTC-4543SA) and a thin SOP 18-pin package (RTC-4543SB).4. Pin FunctionsSignalPin No.SOP-14pin(SOP-18pin)I/O FunctionGND1( 9 )Connects to negative (-) side (ground) of the power supply.CE3( 8 )InputChip enable input pin.When high,the chip is enabled. When low,the DATA pin goes tohigh impedance and the CLK,DATA,and WR pins are not able toaccept input.In addition, when low,the TM bit is cleared.FSEL4( 7 )InputSerect the frequency that is output from the FOUT pin.High : 1 HzLow : 32.768 kHzWR5( 6 )InputDATA pin input/output switching pin.High : DATA input (when writing the RTC)Low : DATA output (when reading the RTC)FOE6( 5 )InputWhen high, the frequency selected by the FSEL pin is output fromthe FOUT pin.When low, the FOUT pin goes to high impedance.V DD9( 14 )Connects to positive (+) side of the power supply.CLK10( 12 )InputSerial clock input pin.Data is gotten at the rising edge during a write, and data is outputat the rising edge during a read.DATA11( 11 )Bi-directional Input/outout pin that is used for writing and reading data.FOUT14( 10 )OutputOutputs the frequency selected by the FSEL pin. 1 Hz output issynchronized with the internal one-second signal.This output is not affected by the CE pin.N.C.2,7,8,12,13( 1,2,3,4,13,15,16,17,18 )Although these pins are not connected internally,they shouldalways be left open in order to obtain the most stable oscillationpossible.* Always connect a passthrough capacitor of at least 0.1 µF as close as possible between V DD and GND.5. Electrical Characteristics5-1. Absolute Maximum RatingsItem Symbol Conditions Min. Max. Unit Supply voltage V DD-0.3 7.0 VInput voltage V I Ta=+25 °C GND-0.3 V DD+0.3 VOutput voltage V O GND-0.3 V DD+0.3 V Storage temperature T STG- -55 +125 °C5-2. Operating ConditionItem Symbol Conditions Min. Max. Unit Operating supplyV DD- 2.5 5.5 V voltageData holding voltage V CLK- 1.4 5.5 VOperating temperature T OPR No condensation-40 +85 °C5-3. Frequency CharacteristicsItem Symbol Conditions Max. Unit Frequency tolerance ∆f/f O Ta=+25 °C , V DD=5.0 V 5 ± 23 * ×10-6Frequency temperatureT op-10to+70 °C +25 °C ref + 10 / - 120 ×10-6 characteristicsFrequency voltagef/V Ta=+25 °C , V DD=2.0 to 5.5 V ± 2 ×10-6/V characteristicsOscillation start time t STA Ta=+25 °C , V DD=2.5 V 3 s Aging fa Ta=+25 °C , V DD=5 V , first year ± 5 ×10-6 * Monthly deviation: Approx. 1 min.5-4. DC CharacteristicsUnless specified otherwise: V DD = 5 V ± 10 %, Ta = - 40 to +85 °C Item Symbol Conditions Min. Typ. Max. Unit Current consumption(1) I DD1 V DD=5.0 V CE=L , FOE=L 1.5 3.0 µA Current consumption(2) I DD2 V DD=3.0 V FSEL=H 1.0 2.0 µA Current consumption(3) I DD3 V DD=2.0 V 0.5 1.0 µA Current consumption(4) I DD4 V DD=5.0 V CE=L , FOE=H 4.0 10.0 µA Current consumption(5) I DD5 V DD=3.0 V FSEL=L 2.5 6.5 µA Current consumption(6) I DD6 V DD=2.0 V No load on the1.5 4.0 µAFOUT pinInput voltage V IH WR,DATA,CE,CLK, 0.8 V DD VV IL FOE,FSEL pins 0.2 V DD V0.5 µAInput off/leak current I OFF WR,CE,CLK,FOE,FSEL pinsV IN = V DD or GNDV OH(1)V DD=5.0 V I OH=-1.0 mA 4.5 V Output voltage V OH(2)V DD=3.0 V DATA , FOUT pins 2.0 VV OL(1)V DD=5.0 V I OL= 1.0 mA 0.5 VV OL(2)V DD=3.0 V DATA , FOUT pins0.8 VOutput load conditionN / CL FOUT pin 2 LSTTL / 30 pF Max.( fanout )Output leak current I OZH V OUT=5.5 V DATA , FOUT pins-1.0 1.0 µAI OZL V OUT=0 V DATA , FOUT pins-1.0 1.0 µASupply voltage detectionV DT- 1.4 1.7 2.0 V voltage5-5. AC CharacteristicsUnless specified otherwise: Ta = - 40 to +85 °C, CL = 50 pF Item Symbol V DD=5 V ± 10 % V DD=3 V ± 10 % UnitMin. Max. Min. Max.CLK clock cycle t CLK0.75 7800 1.5 7800 µsCLK low pulse width t CLKL0.375 3900 0.75 3900 µsCLK high pulse width t CLKH0.375 3900 0.75 3900 µs CLK setup time t CLKS25 50 nsCE setup time t CES0.375 3900 0.75 3900 µsCE hold time t CEH0.375 0.75 µsCE enable time t CE0.9 0.9 s Write data setup time t SD0.1 0.2 µsWrite data hold time t HD0.1 0.1 µs WR setup time t WRS100 100 nsWR hold time t WRH100 100 ns DATA output delay time t DATD0.2 0.4 µsDATA output floating time t DZ0.1 0.2 µs Clock input rise time t r150 100 nsClock input fall time t f150 100 ns FOUT rise time (CL=30 pF) t r2100 200 ns FOUT fall time (CL=30 pF) t f2100 200 ns Disable time (CL=30 pF) t XZ100 200 nsEnable time (CL=30 pF) t ZX100 200 nsFOUT duty ratio (CL=30 pF) Duty 40 60 40 60 % Wait time t RCV0.95 1.9 µs5-6. Timing Charts[]Duty t t100%H=×( 4 ) Disable/enable6. Timer Data Organization• The counter data is BCD code.• Writes and reads are both performed on an LSB-first basis.MSBLSBSecond ( 0 to 59 )FDTs40s20s10s8s4s2s1Minutes ( 0 to 59 ) * mi40mi20mi10mi8mi4mi2mi1Hour ( 0 to 23 ) * *h20h10h8h4h2h1Day of the week( 1 to 7 )*w4w2w1Day ( 1 to 31 ) * *d20d10d8d4d2d1Month ( 1 to 12 ) TM **mo10mo8mo4mo2mo1Year ( 0 to 99 )y80y40y20y10y8y4y2y1• Calendar counter. From 1 Jan 2001 to 31 Dec 2099, it is updated by an automatic calendar function.If a year is 4 multiples, it is a leap year, then date is updatedin order to 28 Feb, 29 Feb, Mar 1.Because there is the case that a leap year does not match when using data of year of except the Christian era, please be careful.Data of a day of the week run in cycles with 7 from 1.A recommended example are 1=Sun, 2=Mon,,,6=Fri, 7=Sat.• Clock counter. Only 24 hours system is supported. • ∗bits. These bits are used as memory.• TM bit. This is a test bit for shipping test. Always clear this bit to “0”.• FDT bit: Supply voltage detection bit• This bit is set to “1” when voltage of 1.7 ±0.3 V or less is detected between V DD and GND. • The FDT bit is cleared if all of the digits up to the year digits are read.• Although this bit can be both read and written, clear this bit to "0" in case of the write cycle.if the supply voltage is lower than the detection voltage value, the FDT bit is set to “1”.7. Description of Operation2) At the first rising edge of the CLK signal, the clock and calendar data are loaded into the shiftregister and the LSB of the seconds digits is output from the DATA pin.3) The remaining seconds, minutes, hour, day of the week, day, month, and year data is shifted out,in sequence and in synchronization with the rising edge of the CLK signal, so that the data isoutput from the DATA pin.The output data is valid until the rising edge of the 52nd clock pulse; even if more than 52 clockpulses are input,the output data does not change.4) If data is required in less than 52 clock pulses, that part of the data can be gotten by setting theCE pin low after the necessary number of clock pulses have been output.Example: If only the data from “seconds” to “day of the week” is needed:After 28 clock pulses, set the CE pin low in order to get the data from “seconds” to “day ofthe week.”5) When performing successive data read operations, a wait (tRCV) is necessary after the CE pinis set low.6) Note that if an update operation (a one-second carry) occurs during a data read operation,the data that is read will have an error of -1 second.7) Complete data read operations within tCE (Max.) = 0.9 seconds, as described earlier.1) RTC 4543 shifts to data input state by condition of WR terminal ="H",CE terminal ="H".2) Writing-data synchronize to a rising edge of CLK, and it inputs into an RTC from LSB of sec.3) Inside counter less than second is reset between falling edges of first CLK from a rising edge of next CLK.And update of Clock register is prohibited by the first falling edge of CLK.4) In writing of data to RTC, all 52 clock is necessary.When CE goes to LOW before the 52 bits transmission is completed, there is the possibilitythat * ,FDT and a year digit were destroyed.If a serial communication break occurs, do verify 8 bits of* bit andFDTbit and year data.5) In a rising edge of 52 clock, all data is written to RTC. Data after 53 bits is ignored.6) When CE goes to LOW, RTC re-starts update.Please finish write access within 0.9 second = tCE (Max.).7) Between write access and read access, recovery timing(tRCV) is necessary.Please do not set the time and date which is non-existence.7-3. Data writes (Divider Reset)After the counter is reset, carries to the seconds digit are halted.After the data write operation,the prohibition on carries to the seconds counter is lifted by setting the CE pin low.Complete data write operations within tCE (Max.) = 0.9 seconds, as described earlier.7-4. FOUT output and 1 Hz carriesDuring a data write operation, because a reset is applied to the Devider counter (from the 128 Hzlevel to the 1 Hz level) after the CE pin goes high during the time between the falling edge of the first clock cycle and the rising edge of the second clock cycle, the length of the first 1 Hz cycle after thedata write operation is 1.0 s +0 / −7.8ms +t CES+t CLK. Subsequent cycles are output at1.0-second intervals.The 1-Hz signal that is output on FOUT is the internal 1-Hz signal with a 15.6-ms shift applied.8. Examples of External Circuits11. Reference DataNote : This data shows values obtained from a sample lot.12. Application notes1) Notes on handlingThis module uses a C-MOS IC to realize low power consumption. Carefully note the following cautions when handling.(1) Static electricityWhile this module has built-in circuitry designed to protect it against electrostatic discharge, the chip could still be damaged bya large discharge of static electricity. Containers used for packing and transport should be constructed of conductive materials.In addition, only soldering irons, measurement circuits, and other such devices which do not leak high voltage should be used with this module, which should also be grounded when such devices are being used.(2) NoiseIf a signal with excessive external noise is applied to the power supply or input pins, the device may malfunction or "latch up."In order to ensure stable operation, connect a filter capacitor (preferably ceramic) of greater that 0.1 µF as close as possible to the power supply pins (between VDD and GNDs). Also, avoid placing any device that generates high level of electronic noise near this module.* Do not connect signal lines to the shaded area in the figure shown in Fig. 1 and, if possible, embed this area in a GND land.(3) Voltage levels of input pinsWhen the input pins are at the mid-level, this will cause increased current consumption and a reduced noise margin, and can impair the functioning of the device. Therefore, try as much as possible to apply the voltage level close to VDD or GND.(4) Handling of unused pinsSince the input impedance of the input pins is extremely high, operating the device with these pins in the open circuit state can lead to unstable voltage level and malfunctions due to noise. Therefore, pull-up or pull-down resistors should be provided for all unused input pins.2) Notes on packaging(1) Soldering heat resistance.If the temperature within the package exceeds +260 °C, the characteristics of the crystal oscillator will be degraded and it may be damaged. The reflow conditions within our reflow profile is recommended. Therefore, always check the mounting temperature and time before mounting this device. Also, check again if the mounting conditions are later changed.* See Fig. 2 profile for our evaluation of Soldering heat resistance for reference.(2) Mounting equipmentWhile this module can be used with general-purpose mounting equipment, the internal crystal oscillator may be damaged in some circumstances, depending on the equipment and conditions. Therefore, be sure to check this. In addition, if the mounting conditions are later changed, the same check should be performed again.(3) Ultrasonic cleaningDepending on the usage conditions, there is a possibility that the crystal oscillator will be damaged by resonance during ultrasonic cleaning. Since the conditions under which ultrasonic cleaning is carried out (the type of cleaner, power level, time, state of the inside of the cleaning vessel, etc.) vary widely, this device is not warranted against damage during ultrasonic cleaning.(4) Mounting orientationThis device can be damaged if it is mounted in the wrong orientation. Always confirm the orientation of the device before mounting.(5) Leakage between pinsLeakage between pins may occur if the power is turned on while the device has condensation or dirt on it. Make sure the device is dry and clean before supplying power to it.Application ManualElectronic devices information on WWW serverDistributor/en/quartz/index.html。
高精度实时时钟简介

Low backup current
IDD 0.8uA Typ.3V
External dimensions
SA JE : 10.1x7.4x3.3mm (SOP-14pin) : 7.3x6.0x1.5mm (VSOJ-20pin)
RX-xxxx SA RX-xxxx JE
RX-8025T (RX-4801 / 8801 series)
Built-in 32.768kHz DTCXO, High Stability Real Time Clock Module
preliminary
RX-8025T (RX-4801 / 8801 series)
Clock / calendar
- sec. / min. / hour / day / week / month / year - alarm / timer - Output frequency : 32.768kHz / 1024Hz / 1Hz - Built-in 32.768kHz DTCXO, High Stability
实时时钟实时时钟故障实时时钟电路高精度高精度乘法实时时钟芯片ds1302实时时钟高精度除法高精度加法高精度算法
Built-in 32.768kHz-DTCXO High Accuracy Real Time Clock Module
About EPSON TOYOCOM’s Real Time Clock Module
Crystal unit
32.768 kHz crystal unit
IC chip Wire bonding Lead - frame Internal structure (image)
+
Real Time Clock IC
epson半导体
epson半导体Epson半导体是爱普生集团的一个子公司,成立于1985年,总部设在日本长野县長野市,专注于开发、制造和销售半导体器件。
Epson半导体提供的产品范围广泛,主要包括微控制器、时钟芯片、传感器以及晶体管等。
在微控制器方面,Epson半导体的产品线包括多种高性能微控制器,如RX、RZ和SH-Navi等系列。
这些微控制器具有强大的计算能力和高速操作能力,适用于各种应用,包括消费电子、自动化、医疗设备等方面。
在时钟芯片方面,Epson半导体提供的产品包括多种高精度时钟芯片,如时钟发生器、实时时钟等。
这些产品具有极高的频率稳定性和低抖动性能,适用于各种高精度应用。
同时,Epson半导体还提供多种低功率消耗的时钟芯片,适用于移动设备和电子表等电池供电的应用。
在传感器方面,Epson半导体是世界领先的MEMS传感器制造商之一,其产品线包括压力传感器、加速度计、陀螺仪等。
这些传感器具有高精度和高稳定性,适用于汽车、医疗设备、智能手机等各种应用。
除了以上三大领域,Epson半导体还在晶体管领域有着广泛的产品线,包括功率型晶体管、MOSFET、IGBT等。
这些产品在家电、工控、可再生能源等领域有着广泛的应用。
除了产品线外,Epson半导体还以创新的研发能力著称。
公司拥有自己的研发中心,并与全球各地的高等学府、研究机构保持着紧密的合作关系,不断研发新的半导体技术和产品,使公司在行业内保持领先地位。
总之,Epson半导体是一家领先的半导体器件制造商,其在微控制器、时钟芯片、传感器等领域拥有广泛的产品线,并以创新的研发能力著称。
公司以高品质、高性能产品及服务,为全球客户提供最优秀的半导体产品及解决方案。
精工爱普生选择赛普拉斯的可编程时钟发生器裸片 用于小尺寸晶振
精工爱普生选择赛普拉斯的可编程时钟发生器裸片
用于小尺寸晶振
CY5077C裸片可实现小型化和高精度频率输出
赛普拉斯半导体公司日前宣布,精工爱普生(Seiko Epson)在其广受欢迎的SG-8003系列的新成员----SG-8003CG可编程晶振中,选用了赛普拉
斯的CY5077C可编程时钟发生器裸片。
SG-8003CG是一款易于编程的超小
型可编程晶振,封装尺寸为2.5 mm x 2.0 mm x 0.8 mm。
CY5077C裸片能为整个SG-8003系列提供精确的可编程频率输出。
这一组合可加快多种小批量
生产的电子设备的上市进程,并降低功耗。
SG-8003CG晶振的微型封装满足了电子业界对更小尺寸印刷电路板
的要求。
除了小尺寸之外,CY5077C还包含一个独有的振荡器调校电路,用
于从1到166MHz频率输出的精调,能在发运前的量产最后阶段在封装内对
其进行编程。
这一灵活性使得快速生产成为可能,即使是小批量的应用也没有问题,而且不需要专用晶体。
请浏览以下网址,获取关于赛普拉斯时序解决方案的
更多信息:cypress/go/clocks.。
EPSON_高精度实时时钟模块
【用于时钟的石英晶体振荡器频率精度】
根据市场要求(能以极低的耗电量保持现在的时刻) ,用于计时的低频 时钟一般采用音叉型石英晶体振荡器。 音叉型石英晶体振荡器驱动时耗电量少的反面, 其频率温度特性为图 1 所示的二次曲线。所以,在进行时钟误差设计时,除了室温(+25℃) 条件下的频率公差以外,还应当考虑到二次曲线的频率温度特性公差。 假设在-40℃的条件下使一般的音叉型石英晶体振荡器连续工作 1 个月, 那么其振荡频率公差将达到-150×10-6 左右,相当于出现 6 分钟(月差 6 分钟)以上的时间误差。 为此,设计人员也许会考虑使用 AT 型石英晶体等频率温度特性较好的 振荡器作为波源。但 AT 型石英晶体的振荡频率通常达到几 MHz,所以 需要在振荡电路中进行分频,以达到用于时钟时的频率。
-6 -6
接口方式 4-wire SPI I C bus 4-wire SPI I C bus
2 2
外形尺寸[mm] LC : 3.6×2.8×1.2t (VSOJ-20pin)
SA : 10.1×7.4×3.3t
(SOP-14pin)
爱普生的产品不仅具有出色的频率稳定性,还准备了 LC、SA 两种外形尺寸,使其兼备实时时钟模块不可或缺的功能。 综上所述,爱普生凭借具有低耗电优势的音叉型石英晶体振荡器生产技术及频率温度特性的补偿电路技术,向市场提供高精度、 低耗电的实时时钟模块产品。而且,我们的产品在出厂前调整频率精度,在保证了精度的基础上提供给顾客,所以使用时不需要调 节频率,为顾客提高设计效率和产品品质做出巨大贡献。
4
音叉型晶体温度特性图 频率公差(×10-6) ② 频率公差(×10-6) ②
电容调整特性图
①
③
温度(C)
爱普生(EPSON)实时时钟模块RX8804CE规格书
Typ.
3.0 3.0 3.0 +25 ±3.41 ±8.02 ±5.03 ±8.02
Max.
5.5 5.5 5.5 +105
Unit
V
Frequency tolerance ( ×10 )
10
-6
Frequency temperature characteristics
5 32.768 kHz DTCXO 0 -5 -10 -15 Tuning fork X'tal -20 -25
2. 3. 4. 5.
8. T2 7.
1.0Max.
2.5 ± 0.2
SDA SOUT
6.
规格(特征)
电气特征 项目
电源电压 温度补偿电压 计时器电压 工作温度
请参考“应用手册”章节内容,以获取更多详细信息
32.768 kHz-DTCXO Frequency temperature characteristics (Example)
V V ºC
频率精度
f/f XB
10-6
功耗(1) 功耗(2)
1)相当于每月 9 秒偏差
2)
IDD1 IDD2
fSCL=0Hz, /INT=VDD, VDD = 5V FOE =GND VDD=VBAT FOUT: 输出 OFF VDD = 3V 温度补偿间隔 2s
3)
本材料中记载的品牌名称或产品名称是其所有人的商标或注册商标。
Seiko Epson Corporation
ISO 14000 是国际标准化组织于 1996 年在全球化变暖、 臭 氧层破坏、以及全球毁林等环境问题日益严重的背景下提 出的环境管理国际标准。
追求高品质
爱普生晶振RA8900CE实时时钟模块(I

DIVIDER
POWER CONTROLLER
INTERRUPTS CONTROLLER
FOUT CONTROLLER
BUS INTERFACE CIRCUIT
CLOCK and
CALENDR
TIMER REGISTER
ALARM REGISTER
CONTROL R EG ISTER
and SYSTEM
Min.
Typ.
Max.
VDD
2.5
3.0
5.5
V
VTEM
2.0
3.0
5.5
V
VCLK
1.6
3.0
5.5
V
TOPR UA
∆ f / f UB UC
-40
+25
+85
Ta = -40 ºC ~ +85 ºC
±3.4 ∗1
Ta = -40 ºC ~ +85 ºC Ta = -30 ºC ~ +70 ºC
CONTROL LER
• •UA •UB •UC
± 3.4 x 10-6 / -40 ºC ~ +85 ºC 商 ± 5.0 x 10-6 / -40 ºC ~ +85 ºC 商 ± 5.0 x 10-6 / -30 ºC ~ +70 ºC 商
9
器
13
器
13
器
• 32.768 kHz • FOUT •
Frequency temperature characteristics
10
5 32.768 kHz DTCXO
0
-5
-10
-15 Tuning fork X'tal
爱普生(EPSON)实时时钟模块RX-4581NB规格书
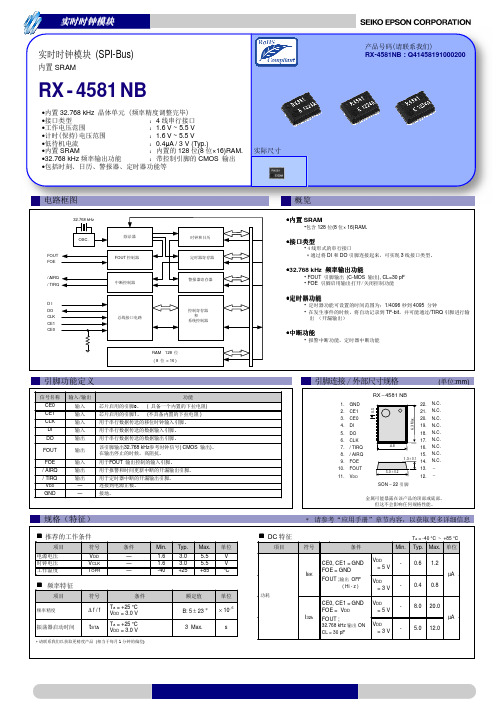
•
•4
∗
DI DO
3
•32Hale Waihona Puke 768 kHz• FOUT
• FOE
(C-MOS 属
), CL=30 pF
•
•
•
1/4096 TF-bit
4095 /TIRQ
•
•
属
1. GND 2. CE1 3. CE0 4. DI 5. DO 6. CLK 7. / TIRQ 8. / AIRQ 9. FOE 10. FOUT 11. VDD
32.768 kHz
FOUT FOE
/ AIRQ / TIRQ
OSC.
DI DO CLK CE1 CE0
FOUT
RAM 128 ( 8 × 16 )
属
CE0 CE1 CLK DI DO
FOUT
FOE
/ AIRQ
/ TIRQ
VDD
-
GND
-
0( 1(
32.768 kHz FOUT
) )
( CMOS )
1.太空设备(人造卫星、火箭等) 2.运输车辆机器控制装置(汽车、飞机、火车、船舶等) 3.用于维持生命的医疗器械 4.海底中转设备 5.发电站控制机器 6.防灾防盗装置 7.交通设备 8.其他,用于与 1~7 具有同等可靠性的用途。
本材料中记载的品牌名称或产品名称是其所有人的商标或注册商标。
Seiko Epson Corporation
DC
Ta = -40 °C ~ +85 °C
Min. Typ. Max.
CE0, CE1 = GND FOE = GND
VDD =5V
-
EPSON 实时时钟芯片RX-8010SJ Application Manual介绍
----------------------------------------------------------------------------------------------------------------------------------------
1.
概述 这是一款内置 32.768k 晶体单元的实时时钟模块。除了具有计时、日历的基本功能以外, 还具有定时中断、固定周期中断、频率缺失检测、频率输出、用户 RAM 等功能。8 Pin 的 SOP 封装使之适合于多种小型化电子设备的应用。 2. 结构框图
RX-8010SJ 12.3 寄存器介绍及使用
12.3.1 时钟日历寄存器 在通讯开始后,时钟和日历的数据会保持不变,等到通讯结束后会自动更新。因此推荐 使用连续访问的方式一次性读取时间数据。 设置举例: 88 年 2 月 29 日 星期天 17:39:45
1) 2) 3)
[SEC],[MIN] 寄存器使用 60 进制的 BCD 码,数据范围 00 – 59 [HOUR]寄存器使用 24 进制 BCD 码,时间采用 24 小时格式。 [WEEK]寄存器用单独的一位来表示对应的星期。见下表:
RX-8010SJ
3. 引脚定义
3.1 引脚功能描述
4. 外观尺寸
RX-8010SJ
5. 推荐操作条件
6. 频率特性
RX-8010SJ
7. 电器特性 (直流)
8. IIC 总线时序特性
RX-8010SJ
9.使用中特别注意事项 9.1 上电 9.1.1 供电电压特性 * tR1 作为上电复位的限制条件,当不能满足这个条件时,不能正常实现上电复位。 必须通过软件对系统进行初始化设置。 *在短时间内电源频繁 ON/OFF 变化,会导致上电复位不可靠。在掉电以后,要保持 VDD= GND 这种状态 60 s 以上的时间以保证上电复位的可靠性。如果不能满足这个条 件,请通过软件的初始化来设置系统。
时钟模块在电波手表等应用中的选型经验分享

时钟模块在电波手表等应用中的选型经验分享近年,随着电波手表的普及以及可从NTP 时间服务器获取标准时间等,获取极为准确的时间已不再繁琐劳神。
因此,用于金融、交通管理、电力控制、安全及体育等应用系统设计一般均以可参照正确时间为基础。
这类处理系统在数据输入、输出部分必须设置为数众多的终端设备,且这些终端设备也需要有正确的时间。
为了回应上述需求,爱普生(EPSON)向市场提供了内建以高稳定频率振荡的石英晶体单元的实时时钟模块。
时钟模块RX-4803SA爱普生(EPSON)推出的实时时钟模块中,内建TCXO 数字式实时时钟模块、具有温度补偿功能的高精度产品如下:RX-4803SA/LC、RA4803SA(串行接口,以下称为“4803 实时时钟模块”)及RX-8803SA/LC、RA8803SA(I2C 接口,以下称为“8803实时时钟模块”)。
这些产品可在-40 至+85℃的温度范围内将频率输出精度保持在±3.4×10-6(相当于月差9 秒),即每天平均时间误差控制在±0.3 秒以下。
但是,即便上述产品具备高时间精度,有些顾客因用途需要亦要求对低于1 秒的微小误差进行调节。
实时时钟模块生成1 秒的原理是以32.768kHz 的石英晶体单元做为波源,通过分频而获得。
如果需要让多台设备同时执行某一动作,则有必要对低于1秒的误差进行调节,使各设备的时间保持一致。
4803 实时时钟模块与8803实时时钟模块可调节低于1 秒的误差,以回应这种需求。
很多爱普生的实时时钟模块搭载了RESET 功能,可使用软件对上述低于1 秒的误差进行调节。
但是,使用软件调节时间的方法会因软件处理时间而产生时间偏差。
这对需要以精确时间实现同步的用户来说,这个误差也须解决。
为此,4803 实时时钟模块和8803实时时钟模块又搭载了使用硬件调节时间的ERST 功能。
时钟模块RX8803SA小贴士:什么是电波表?所谓电波表,机身由原子时钟和无线电接收系统组成,由国家授时中心发出准确时间,通过无线电接收系统接收、经CPU处理后显示时间,电波表30万年误差不会超过一秒。
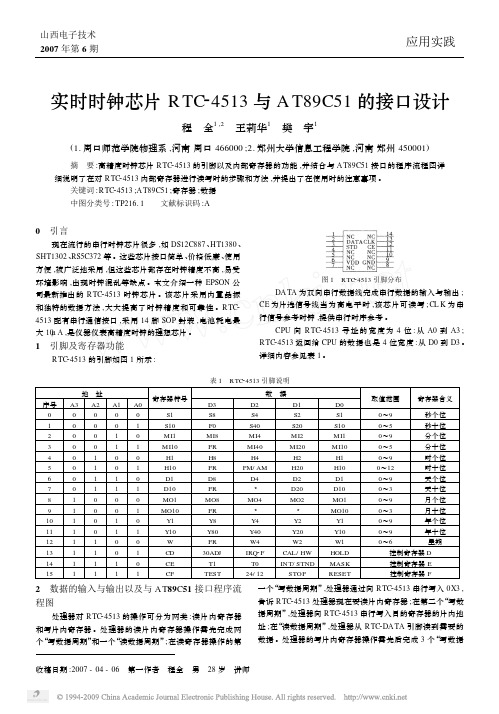
实时时钟芯片RTC_4513与AT89C51的接口设计
北京航空航天大学出版社 ,2002. 6. [2 ] 李广弟. 单片机基础 (第一版) [ M ] . 北京 :北京航空航
天大学出版社 ,1999. 2. [ 3 ] http :/ / www. dzsc. com/ 中国电子市场.
50
写数据保持时间
TDH
50
读数据延迟时间
TRD
250
读数据失效延迟
TRZ
100
CL K 上升/ 下降时间
TRF
20
2. 2 R TC24513 写数据的操作流程
R TC24513 写数据操作以 1 比特数据为单位 ,完成一个
图 3 写数据流程图 2. 3 R TC24513 读数据的操作流程
表 1 RTC24513 引脚说明
序号 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
地 址
A3 A2 A1
0
0
0
0
0
0
0
0
1
0
0
1
0
1
0
0
1
0
0
1
1
0
1
1
1
0
0
1
0
0
1
0
1
1
0
1
1
1
0
1
1
0
1
1
1
1
1
1
寄存器符号 A0
0
S1
1
S10
0
M I1
1
M I10
0
H1
爱普生(EPSON)实时时钟模块RA8804CE规格书
Min. 1.6 1.5 1.5 -40
Typ. 3.0 3.0 3.0 +25 ±3.41 ±8.02 ±5.03 ±8.02
Max. 5.5 5.5 5.5 +105
Unit V
Frequency tolerance ( ×10 )
-6
Frequency temperature characteristics
实时时钟模块
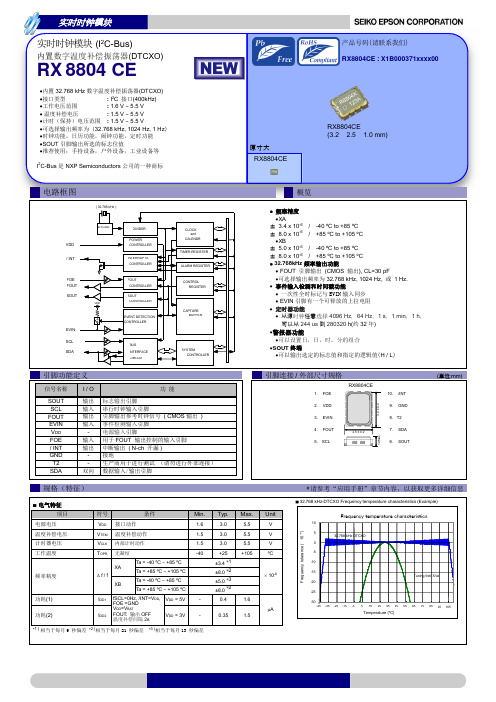
实时时钟模块 (I2C-Bus)
汽车应用
内置数字温度补偿振荡器(DTCXO)
产品号码(请联系我们) RA8804CE : X1B000381Axxx00
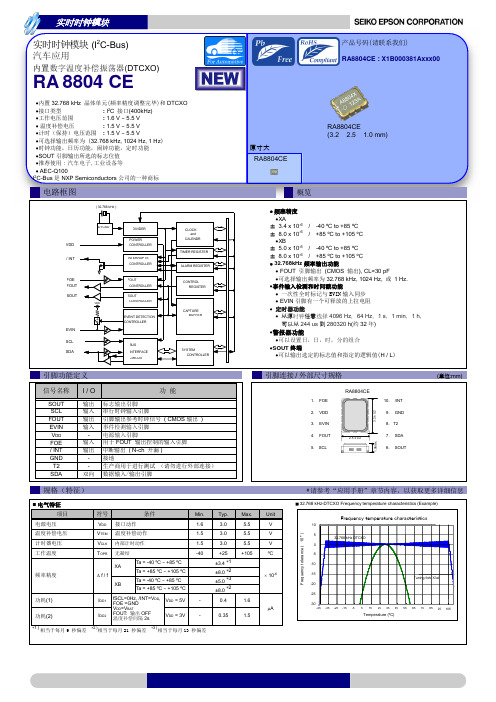
RA 8804 CE
•内置 32.768 kHz 晶体单元(频率精度调整完毕)和 DTCXO •接口类型 : I2C 接口(400kHz) •工作电压范围 : 1.6 V 5.5 V •温度补偿电压 : 1.5 V 5.5 V •计时(保持)电压范围 : 1.5 V 5.5 V •可选择输出频率为(32.768 kHz, 1024 Hz, 1 Hz) •时钟功能,日历功能,闹钟功能,定时功能 •SOUT 引脚输出所选的标志位值 •推荐使用:汽车电子,工业设备等 • AEC-Q100 I2C-Bus 是 NXP Semiconductors 公司的一种商标
1. 2. 3. 4. 5. FOE VDD EVIN FOUT SCL
3.2 ± 0.2
(単位:mm)
RA8804CE
10. 9. /INT GND
I/O
输出 输入 输出 输入 输入 输出 双向
8. T2 7.
1.0Max.
2.5 ± 0.2
SDA SOUT
6.
规格(特征)
电气特征
RX8111CE模块说明书

RX8111CE 封装转换模块说明文件特性:将RTC (RX8111CE )和周边器件设计到一个合适大小的PCBA 上,完成最小系统设计。
该模块的特性和RX8111CE 特性相同,具体参考RX8111CE 使用手册。
https:///en/products/rtc/rx8111ce.html-内置32.768k 晶体-宽电压支持:1.6V ~ 5.5V -接口类型:IIC -低备份电流:100nA Typ./3V-8级时间戳功能-丰富中断功能应用:-工业仪表-各种计时设备-手持低功耗设备等==================================================================================模块上RX8111CE引脚定义及封装尺寸:(正面图)(反面图)EPS0N RTC 尺寸:10.25±0.3*7.3±0.2*2.0±0.2mm转换模块电路设计:不同功能模式的阻容配置:模式:预装器件(除RX-8111CE ):备注:兼容RX-8025SA 模式C1,C2,C3,R1,R4RX8111CE:VDD,VBAT,VIO 接一起RX8111CE 评估模式C1,C2,C3,R1,R2,R3,R5评估外接电池(评估默认接法)C1,C2,C3,R2,R3,R5,R6IIC 总线电平电压不同,vio 测试模块引脚定义:模块引脚功能定义:1.V_Bat2.SCL3.FOUT4.NC5.NC6.VDD7.NC 14.V_Io 13.SDA 12.NC 11.GND 10./INT 9.NC 8.EVIN引脚名:I/O功能:1.V_Bat--备份电源接口,可接电池(可充电),电容2.SCL Input IIC串行时钟输入硬件3.FOUT Output频率输出引脚(CMOS)6.VDD--电源引脚8.EVIN Input外部触发输入,用于时间戳触发。
爱普生晶振RX8900CE实时时钟模块(I
本材料中记载的品牌名称或产品名称是其所有人的商标或注册商标。
Seiko Epson Corporation
-
T2(VPP)
-
SDA
( CMOS
)
Pin
பைடு நூலகம்
FOUT
( N-ch
)
属
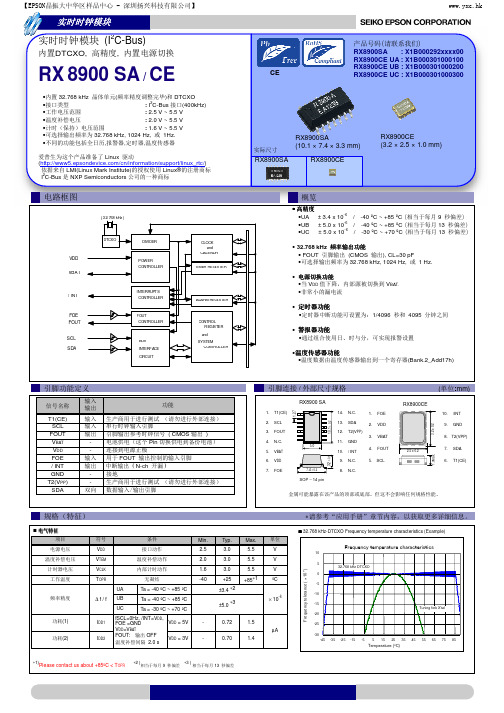
1. T1(CE) 2. SCL 3. FOUT 4. N.C. 5. VBAT 6. VDD 7. FOE
1.2 7
/
RX8900 SA
5.0 7.4 ± 0.2
SOP − 14 pin
3.2 ± 0.1
10.1 ± 0.2
14. N.C.
9
器
13
器
13
器
• 32.768 kHz • FOUT •
(CMOS ), CL=30 pF 32.768 kHz, 1024 Hz, 1 Hz.
• • VDD •
VBAT.
•
•
1/4096
4095
• •
•
•
(Bank.2_Add17h)
T1(CE)
SCL
FOUT
VBAT
-
VDD
-
FOE
/ INT
GND
•
,
,
,
Linux
(/cn/information/support/linux_rtc/)
LMI(Linux Mark Institute) I2C-Bus NXP Semiconductors
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
音叉型晶体温度特性图 频率公差(×10-6) ②
振荡电路
内部结构概要
石英晶体单元
温度信息
①
②
补偿后的频率
分频电路
①
通常
温度(C) 图 4:逻辑调整方式说明图
补偿时
每秒 32768 脉冲
每秒 32767 脉冲
图 5 表示使用数字式 TCXO 进行频率精度补偿(电容调整方式)的爱普生实时时钟模块的频率温度特性。
音叉型晶体温度特性图 频率公差(×10-6) ② 频率公差(×10-6) ②
电容调整特性图
①
③
温度(C)
图 3:电容调整方式说明图
负载电容(pF)
2
White paper
<逻辑调整方式> 逻辑调整方式指不调整石英晶体振荡器的频率而起振,在分频电路的一部分增减脉冲进行补偿的方法。简易原理用图 4 表示。 补偿的具体内容包括根据周围温度①求出频率变量②,在分频电路中对该频率变量②相应的频率进行补偿后输出。 如图 4 所示,通常由 32768 个脉冲生成“1 秒”的时间,若改为由 32767 个脉冲生成“1 秒”信号,就可以缩短 1 秒的周期。 假如以每秒一次的频度执行该补偿,其频率补偿量则相当于约 30.5×10-6。通过调整生成 1 秒的脉冲数以及变更补偿频度,就可 以在不更改振荡电路的条件下进行较大的补偿。而且,该方式使用逻辑电路进行调整,最终将正确输出转动时钟的 1 秒信号,因 而被广泛用于以 1 秒工作的手表等的时钟源。然而,输出到外部的时钟信号周期因温度补偿而急剧变化,因此将导致使用该时钟 的 CPU 不能以正确时间工作,使用这种补偿方式时周围的元器件将无法享受其恩惠。
White paper
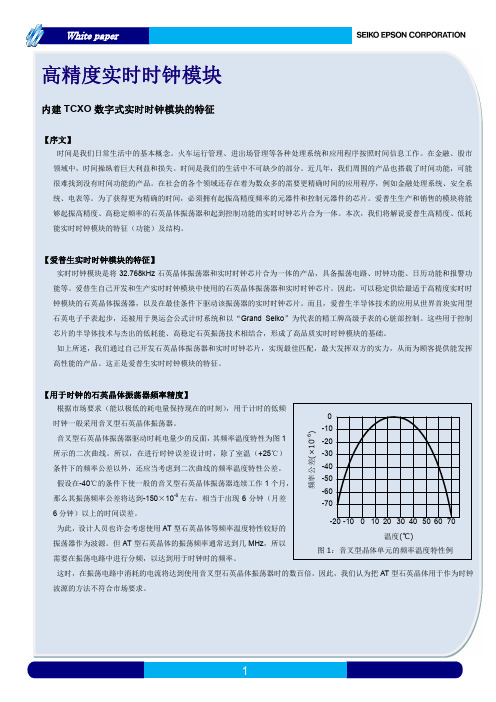
高精度实时时钟模块
内建 TCXO 数字式实时时钟模块的特征
【序文】
时间是我们日常生活中的基本概念。火车运行管理、进出场管理等各种处理系统和应用程序按照时间信息工作。在金融、股市 领域中,时间操纵着巨大利益和损失。时间是我们的生活中不可缺少的部分。近几年,我们周围的产品也搭载了时间功能,可能 很难找到没有时间功能的产品。在社会的各个领域还存在着为数众多的需要更精确时间的应用程序,例如金融处理系统、安全系 统、电表等。为了获得更为精确的时间,必须拥有起振高精度频率的元器件和控制元器件的芯片。爱普生生产和销售的模块将能 够起振高精度、高稳定频率的石英晶体振荡器和起到控制功能的实时时钟芯片合为一体。本次,我们将解说爱普生高精度、低耗 能实时时钟模块的特征(功能)及结构。
-6 -6
接口方式 4-wire SPI I C bus 4-wire SPI I C bus
2 2
外形尺寸[mm] LC : 3.6×2.8×1.2t (VSOJ-20pin)
SA : 10.1×7.4×3.3t
(SOP-14pin)
爱普生的产品不仅具有出色的频率稳定性,还准备了 LC、SA 两种外形尺寸,使其兼备实时时钟模块不可或缺的功能。 综上所述,爱普生凭借具有低耗电优势的音叉型石英晶体振荡器生产技术及频率温度特性的补偿电路技术,向市场提供高精度、 低耗电的实时时钟模块产品。而且,我们的产品在出厂前调整频率精度,在保证了精度的基础上提供给顾客,所以使用时不需要调 节频率,为顾客提高设计效率和产品品质做出巨大贡献。
【用于时钟的石英晶体振荡器频率精度】
根据市场要求(能以极低的耗电量保持现在的时刻) ,用于计时的低频 时钟一般采用音叉型石英晶体振荡器。 音叉型石英晶体振荡器驱动时耗电量少的反面, 其频率温度特性为图 1 所示的二次曲线。所以,在进行时钟误差设计时,除了室温(+25℃) 条件下的频率公差以外,还应当考虑到二次曲线的频率温度特性公差。 假设在-40℃的条件下使一般的音叉型石英晶体振荡器连续工作 1 个月, 那么其振荡频率公差将达到-150×10-6 左右,相当于出现 6 分钟(月差 6 分钟)以上的时间误差。 为此,设计人员也许会考虑使用 AT 型石英晶体等频率温度特性较好的 振荡器作为波源。但 AT 型石英晶体的振荡频率通常达到几 MHz,所以 需要在振荡电路中进行分频,以达到用于时钟时的频率。
频率温度特性图
10 5 32.768 kHz 数字式 TCXO 0
频率公差 ( ×10-6 )
-5 -10 -15 -20 -25 -30 -45 -35 -25 -15 -5 5 15 25 35 45 5字式 TCXO 进行补偿前后的频率温度特性
爱普生的实时时钟模块产品使用数字式 TCXO 进行频率补偿后获得了出色的频率精度, 并拥有高精度、 高稳定和低耗电的特点。 表 1 表示爱普生产品的特征及概要。 表 1:内建数字式 TCXO 的高精度实时时钟模块的介绍
产品名称 RX-4803LC RX-8803LC RX-4803SA RX-8803SA 特征
【爱普生实时时钟模块的特征】
实时时钟模块是将 32.768kHz 石英晶体振荡器和实时时钟芯片合为一体的产品,具备振荡电路、时钟功能、日历功能和报警功 能等。爱普生自己开发和生产实时时钟模块中使用的石英晶体振荡器和实时时钟芯片。因此,可以稳定供给最适于高精度实时时 钟模块的石英晶体振荡器,以及在最佳条件下驱动该振荡器的实时时钟芯片。而且,爱普生半导体技术的应用从世界首块实用型 石英电子手表起步,还被用于奥运会公式计时系统和以“Grand Seiko”为代表的精工牌高级手表的心脏部控制。这些用于控制 芯片的半导体技术与杰出的低耗能、高稳定石英振荡技术相结合,形成了高品质实时时钟模块的基础。 如上所述,我们通过自己开发石英晶体振荡器和实时时钟芯片,实现最佳匹配,最大发挥双方的实力,从而为顾客提供能发挥 高性能的产品。这正是爱普生实时时钟模块的特征。
与音叉型石英晶体振荡器的温度特性(图 5 中的绿线)相比,可以看出爱普生实时时钟模块的补偿后的温度特性(图 5 中的蓝 线)在较大的温度范围内保持稳定,时钟误差仅相当于月差 9 秒(频率精度为±3.4×10-6) ,实现了高精度、高稳定。
3
White paper
【爱普生内建数字式 TCXO 的实时时钟模块产品介绍】
石英晶体单元
32.768kHz
振荡电路
电容列阵
温度传感器
AD 转换 器
控制器
补偿数据
图 2:频率精度补偿概要图(电容调整方式)
<电容调整方式> 电容调整方式指通过改变石英振荡频率进行补偿的方法。该方式利用振荡频率随石英晶体振荡器的振荡负载电容的增减而变化 的特点,补偿因周围温度而产生的频率变动。简易原理用图 3 表示。 图 3 左表示音叉型石英晶体振荡器的频率温度特性,图 3 右表示频率随负载电容而变化的电容调整特性。补偿的具体内容包括 根据周围温度①求出频率变量②,并推导出该频率变量②相应的负载电容变量③。将该温度相应的负载电容变量作为补偿值呼出 后,对振荡频率进行补偿。该方式直接对振荡频率进行补偿,因此可以把实时时钟模块的振荡输出补偿为高精度后作为低频的休 眠时钟使用。
·内建 32.768kHz 温度补偿振荡器(数字式 TCXO)波源 ·频率精度:(-40 至+85℃时±3.4×10 ,-40 至+85℃时±5×10 ) ·1/100 秒定时器控制寄存器 ·接口电压范围:1.6V-5.5V ·温度补偿工作电压范围:2.2V-5.5V ·计时(保持)电压范围:1.6V-5.5V ·可选择频率的时钟输出(32.768kHz、1024Hz、1Hz) ·时钟、日历功能、报警功能、定时功能、内建 EVIN 输入功能 ·可通过连接端子而作为振荡器(32.768kHz 数字式 TCXO)使用
4
0 频率公差(×10-6) -10 -20 -30 -40 -50 -60 -70 -20 -10 0 10 20 30 40 50 60 70 温度(℃) 图 1:音叉型晶体单元的频率温度特性例
这时,在振荡电路中消耗的电流将达到使用音叉型石英晶体振荡器时的数百倍。因此,我们认为把 AT 型石英晶体用于作为时钟 波源的方法不符合市场要求。
1
White paper
【使用数字式 TCXO 的频率精度补偿方法】
如图 1 所示,音叉型石英晶体振荡器具有振荡频率随周围温度而变化的特性,为提高时钟精度则需进行精度补偿。图 2 表示的 是爱普生所采用的通过数字式 TCXO 温度补偿而进行的频率精度补偿方法。 该方法每隔一定周期将周围温度信息转换成数字,从内存中呼出该温度相应的补偿值,对振荡频率进行补偿。振荡频率补偿方 式可分为两大种类:电容调整方式和逻辑调整方式。爱普生实时时钟模块中主要使用电容调整方式。在下页中说明补偿方式。