铁路与公路交叉道口护栏自动控制系统设计Word版
PLC课题铁路与公路交叉口护栏自动控制系统
PLC课题铁路与公路交叉口护栏自动控制系统姓名:学号:班级:目录一、任务要求 (3)二、系统总体方案 (3)三、PLC型号选择及其他PLC元器件分配 (4)四、PLC控制系统硬件接线图 (5)五、程序框图和梯形图 (6)5.1程序框图 (6)5.2梯形图 (7)六、心得体会 (10)铁路与公路交叉道口护栏自动和手动控制系统设计一、任务要求任意方向火车来,压住预告传感器时,将道口两侧道路右侧前进方向封锁,同时发出警告,让道口区内的车辆快速通过。
延时一段时间后(可用SMB28调整),将道口两侧道路左侧前进方向封锁,封锁全部道口。
火车通过后,压住前方预告传感器时,解除封锁。
并有手动操作模式。
试列出输入输出分配表,画出PLC 硬件接线图,列出PLC程序清单及注释。
二、系统总体方案1、此自动控制系统是通过火车触动传感器和plc来实现的。
2、当火车驶入道口,位于两侧的传感器将会检测到火车从而发出信号到plc。
plc根据程序设定对应输出,使护栏关闭右侧公路路面。
汽车可以顺利驶出道口。
3、计时器开始计时,经过2s后,护栏全部关闭。
4、当火车驶出道口经过传感器,传感器发出信号到plc,plc对应输出,解除封锁。
5、切换到手动时,按下右面公路封闭按钮,右面公路关闭。
6、按下左面公路关闭按钮,右面公路关闭。
7、按下接触封锁按钮,封锁解除。
铁道口传感器分布图三、PLC型号选择及其他PLC元器件分配四、PLC控制系统硬件接线图图1-2( plc控制系统硬件接线图)五、程序框图和梯形图5.1程序框图图5-1 自动控制程序框图图5-2 手动控制程序框图5.2梯形图实验结果:1、输入编写的梯形图,按照plc硬件接线图连线。
传感器由点触开关代替。
2、按下SB1,L1放出警告,同时L2、L3灯亮,护栏关闭右侧公路面。
3、经过2s,L4、L5灯亮,护栏封锁全部路面。
4、按下SB2,L6、L7、L8、L9灯亮,L1、L2、L3、L4、L5复位。
铁路与公路交叉口护栏自动控制系统[实用新型专利]
![铁路与公路交叉口护栏自动控制系统[实用新型专利]](https://img.taocdn.com/s3/m/aeee36cec9d376eeaeaad1f34693daef5ff7135e.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201720277346.5(22)申请日 2017.03.21(73)专利权人 徐超地址 318000 浙江省台州市椒江区前所街道外西村26号(72)发明人 徐超 (51)Int.Cl.G05B 19/042(2006.01)(54)实用新型名称铁路与公路交叉口护栏自动控制系统(57)摘要本实用新型主要涉及交通控制领域,更具体地,涉及铁路与公路交叉口护栏自动控制系统。
铁路与公路交叉口护栏自动控制系统的振动传感器、限位开关、压力传感器、计时模块的输出端连接着控制器的输入端;电源模块的输出端连接着控制器的输入端;控制器的输出端连接着驱动模块的输入端;驱动模块的输出端连接着升降电机的输入端;控制器的输出端连接着交通灯的输入端;控制器的输出端连接着报警模块的输入端;控制器的输出端连接着显示模块的输入端。
本实用新型铁路与公路交叉口护栏自动控制系统,通过振动传感器和压力传感器提前预支火车来的信息,当检测到火车要来的信息,控制升降电机降下栏杆,交通灯红灯亮起,报警模块发出声响进行报警。
权利要求书1页 说明书5页 附图7页CN 206573905 U 2017.10.20C N 206573905U1.铁路与公路交叉口护栏自动控制系统,其特征在于,所述铁路与公路交叉口护栏自动控制系统包括振动传感器、限位开关、压力传感器、计时模块、电源模块、控制器、驱动模块、升降电机、交通灯、报警模块、显示模块,所述振动传感器的输出端连接着控制器的输入端;所述限位开关的输出端连接着控制器的输入端;所述压力传感器的输出端连接着控制器的输入端;所述计时模块的输出端连接着控制器的输入端;所述电源模块的输出端连接着控制器的输入端;所述控制器的输出端连接着驱动模块的输入端;所述驱动模块的输出端连接着升降电机的输入端;所述控制器的输出端连接着交通灯的输入端;所述控制器的输出端连接着报警模块的输入端;所述控制器的输出端连接着显示模块的输入端。
铁路和公路交叉路口的交通控制器设计

长沙学院数电课程设计说明书题目八路集成电路智力竞赛抢答器系(部) 电子与通信工程系专业(班级) 电子信息工程姓名学号指导教师起止日期2012.6.4-2012.6.82010级电子信息工程专业课程设计任务书(课题一)系(部):电子与通信工程系专业:电子信息工程学生姓名同组者指导教师课题名称铁路和公路交叉路口的交通控制器设计设计要求及设计参数1、实现双向原则,即为火车双向行驶,汽车双向行驶;2、满足火车优先原则,即火车来了就过火车,不管汽车是否来;3、火车行驶中亮红灯,护栏放下;火车过后亮绿灯,护栏弹上;4、应用压力传感器产生高低电平信号,控制电路的红绿灯的亮灭以及护栏的开合。
设计工作量一周:1、查找资料,根据要求的格式并结合所查资料写出理论设计方案的全过程,实验操作的步骤、数据以及结论。
2、学习使用MultiSim9软件,利用MultiSim9画出原理图并进行仿真。
3、学习使用Protel软件,利用Protel完成原理图绘制。
进度安排起止日期工作内容备注星期一(6月4日)全体集合,指导教师开题,辅导报告、查阅资料龙英星期三(6月5日)Multisim仿真刘亮星期四(6月6日)Protel原理图、PCB制版刘亮星期五(6月8日)验收、答辩、撰写课程设计报告刘亮主要参考资料1、 康华光。
电子技术基础数字部分(第五版)2、 杨欣、王玉凤、刘湘黔。
电路设计与仿真——基于Multisim9与protel993、 标准集成电路数据手册TTL 电路指导教师签名年 月 日系(部)主管领导意见年 月 日答辩评委老师年 月 日教研室 意见年 月 日长沙学院课程设计鉴定表姓名学号专业电子信息工程班级设计题目铁路和公路交叉路口的交通控制器设计指导教师指导教师意见:评定等级:教师签名:日期:答辩小组意见:评定等级:答辩小组长签名:日期:教研室意见:教研室主任签名:日期:系(部)意见:系主任签名:日期:说明课程设计成绩分“优秀”、“良好”、“及格”、“不及格”四类;目录摘要.............................................................................................................. 错误!未定义书签。
铁路与公路交叉道口护栏自动控制系统设计
可编程序控制器课程设计报告院系:电气系专业班级:自动化10-2学号:1030130229姓名:潘晓真铁路与公路交叉道口护栏自动控制系统设计一、任务要求铁路与公路交叉道口护栏自动控制系统设计。
任意方向火车来,压住预告传感器时,将道路右侧向前方向封锁,同时发出警告,让道口区内的车辆快速通过。
压住预告2时,封锁栅栏继续左移,封锁全部道口。
火车通过后,且无另一个方向火车来时,解除封锁,否则继续封锁,继续发出警告。
试列出输入输出分配表,画出plc硬件接线图,列出plc程序清单及注释。
二、系统总体方案1、此自动控制系统是通过火车触动传感器和plc来实现的。
2、当火车驶入道口,位于两侧的传感器1将会检测到火车从而发出信号到plc。
plc根据程序设定对应输出,使护栏关闭右侧公路路面。
汽车可以顺利驶出道口。
3、计时器开始计时,经过10s后,护栏全部关闭。
4、当火车驶出道口经过传感器3后,10s内传感器发出信号到plc,plc对应输出,解除封锁。
5、当传感器失灵等特殊情况之后通过人工操作也可实现对路面的封锁,是火车安全通过。
同时也可以实现人工复位。
铁路道口传感器分布图:图1-1(铁路道口传感器分布图)三、PLC型号选择及其他PLC元器件分配I/O分配表:表1-1( I/O分配表)四、PLC控制系统硬件接线图图1-2( plc控制系统硬件接线图)六、程序框图和设计软件截图程序框图:图1-3(程序框图)梯形图:七、实验结果:1、输入编写的梯形图,按照plc硬件接线图连线。
传感器由点触开关代替,Q0.0,Q0.1,Q0.2,Q0.5,Q0.6分别接指示灯1、2、3、4、5。
2、按下SB1,L1、L2灯亮,电动机正转护栏关闭右侧公路面、放出警告,到达行程开关SA1后自动停止。
3、按下SB2后,L3灯亮,电动机继续正转护栏封锁全部路面。
到达行程开关SA2后自动停止。
4、当火车经过传感器3且10s后无火车再来时系统自动解除封锁。
道口控制系统
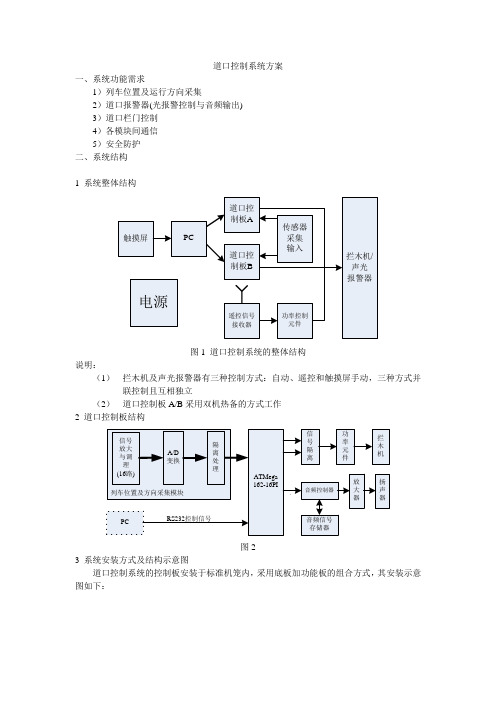
道口控制系统方案一、系统功能需求1)列车位置及运行方向采集2)道口报警器(光报警控制与音频输出)3)道口栏门控制4)各模块间通信5)安全防护二、系统结构1 系统整体结构图1 道口控制系统的整体结构说明:(1)拦木机及声光报警器有三种控制方式:自动、遥控和触摸屏手动,三种方式并联控制且互相独立(2)道口控制板A/B采用双机热备的方式工作2 道口控制板结构图23 系统安装方式及结构示意图道口控制系统的控制板安装于标准机笼内,采用底板加功能板的组合方式,其安装示意图如下:图3道口控制系统机笼结构示意图图4 道口控制系统机笼底板接口示意图三、系统原理道口控制系统由列车位置和方向采集模块、触摸控制终端、报警器及道口拦门设备控制模块和控制中心组成。
列车位置和方向采集模块通过放置在轨道上的传感器装置来采集列车的位置和行进方向信息,并将采集到的信息通过电缆(或无线方式)上传到控制中心;控制中心通过列车位置和方向信息判断是否有车即将要通过系统所防护的道口,如果确认有车,系统将控制开启报警器并驱动道口拦门设备防护道口。
报警器和道口拦门方式有三种控制方式:系统自动,人工遥控和人工手动三种。
另外系统还增加了紧急情况强制防护装置,以防止在系统故障时紧急启动或切断报警器和拦门装置的电源。
各模块的功能原理具体如下1)传感器信息采集模块:通过放置在轨旁的无源磁感应传感器,感应列车的通过,产生一对差分电压信号,此信号经过电压跟随电路和放大、滤波电路进行处理,再经过隔离采样后送入单片机。
单片机将采集到的信息通过串口送到控制中心(PC)。
2)触摸屏控制终端:作为道口和列车位置采集点的显示终端,并设置道口设备的开启和关闭控制按钮,工作人员可以通过触摸屏观察道口和监测点状态,并可以在触摸屏上手动操作道口防护设备。
3)报警器和道口拦门设备驱动模块:接收单片机的控制量,通过功率元件控制道口设备。
控制电路采用二取二原理。
为防止单片机或者控制中心故障导致道口无法工作,增加与单片机控制回路并联的手动控制开关,紧急情况可以直接用此开关直接控制道口设备。
大铁无人值守铁路道口自动控制系统的设计方案

定,然后再向其他系统发出命令信息,从而进行指挥。
系统硬件设计的选择可根据设计单位的经济能力、工况条件、要求程度等具体情况选择,比如可以选用单片机,其硬件组合关系有所体现。
由CPU、ROM、锁存器等构成最小的微机系统,传感系统的信号由I/O口输入,由此启动控制信号由功放上的输出,系统程序固化在ROM中。
当判断传感系统的信号为有车即将通过时,CPU即向声光报警系统发出启动信号,并经过适当延时,让已经在铁道上的车辆和行人有时间离开,然后发出启动路障的信号,直到当传感器判断系统信号为车已经通过”时,向报警系统和路障系统发出终止信号。
传感系统传感系统是全部系统的神经末梢,本文根据自身思路特别设计了一种有效的传感器,来保证传感系统的可靠性和先进性。
传感器的设计示意图如图3所示。
图3 传感器图4 传感系统电路结构图 声光报警系统声光报警系统采用交通信号与文字相结合,并伴有音响揭示效果的综合报警系统,以最有效地刺激人的感官,具体TKB-III-ZD(三灯自动道口报警器)、TKB-III--SD (三灯遥控道口报警器)和TKB-III--WX(三灯无线道口报 路障系统在设置路障方面,需要使用一种快速运行的路障并能保证安全有效地制止车辆抢道,对正在行驶的车辆能迫使其停车。
所以可以使用传统自上而下的栏杆路障。
电源系统采用交流电(市电)→直流电→蓄电池→直流电的供电方式,保证电力系统不受外界干扰。
故障紧急报警系统故障紧急报警系统可以实现在系统发生故障时,仍然保证道口的安全操作。
故障报警系统就是要绕过控制系统、声光报警系统及路障系统本身,从第三者的角度对其进行监视。
因此它是直接从传感器中采集信号(此处的传感器并非原传图2 系统工作平面示意图(下转第图1 VR空间生成示意图 软件发布与推广第一,在手机应用商店发布基于文化传播领域的APP。
通过在用户手机中安装此APP手机眼镜设备,使用户在任意地点全方位观看体验虚拟世界。
交通路口智能管理控制系统框架设计
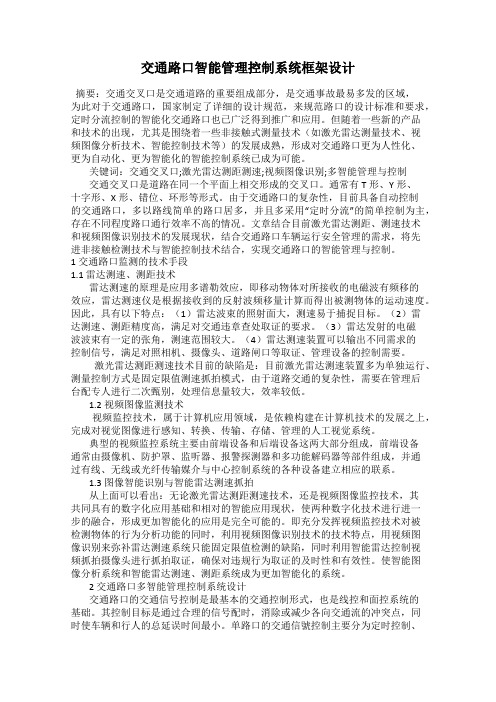
交通路口智能管理控制系统框架设计摘要:交通交叉口是交通道路的重要组成部分,是交通事故最易多发的区域,为此对于交通路口,国家制定了详细的设计规范,来规范路口的设计标准和要求,定时分流控制的智能化交通路口也已广泛得到推广和应用。
但随着一些新的产品和技术的出现,尤其是围绕着一些非接触式测量技术(如激光雷达测量技术、视频图像分析技术、智能控制技术等)的发展成熟,形成对交通路口更为人性化、更为自动化、更为智能化的智能控制系统已成为可能。
关键词:交通交叉口;激光雷达测距测速;视频图像识别;多智能管理与控制交通交叉口是道路在同一个平面上相交形成的交叉口。
通常有T形、Y形、十字形、X形、错位、环形等形式。
由于交通路口的复杂性,目前具备自动控制的交通路口,多以路线简单的路口居多,并且多采用“定时分流”的简单控制为主,存在不同程度路口通行效率不高的情况。
文章结合目前激光雷达测距、测速技术和视频图像识别技术的发展现状,结合交通路口车辆运行安全管理的需求,将先进非接触检测技术与智能控制技术结合,实现交通路口的智能管理与控制。
1 交通路口监测的技术手段1.1 雷达测速、测距技术雷达测速的原理是应用多谱勒效应,即移动物体对所接收的电磁波有频移的效应,雷达测速仪是根据接收到的反射波频移量计算而得出被测物体的运动速度。
因此,具有以下特点:(1)雷达波束的照射面大,测速易于捕捉目标。
(2)雷达测速、测距精度高,满足对交通违章查处取证的要求。
(3)雷达发射的电磁波波束有一定的张角,测速范围较大。
(4)雷达测速装置可以输出不同需求的控制信号,满足对照相机、摄像头、道路闸口等取证、管理设备的控制需要。
激光雷达测距测速技术目前的缺陷是:目前激光雷达测速装置多为单独运行、测量控制方式是固定限值测速抓拍模式,由于道路交通的复杂性,需要在管理后台配专人进行二次甄别,处理信息量较大,效率较低。
1.2 视频图像监测技术视频监控技术,属于计算机应用领域,是依赖构建在计算机技术的发展之上,完成对视觉图像进行感知、转换、传输、存储、管理的人工视觉系统。
【精品】铁路和公路交叉路口的交通控制器设计
【精品】铁路和公路交叉路口的交通控制器设计本文主要介绍铁路和公路交叉路口的交通控制器设计。
在这类交叉路口,铁路和公路交通是以不同的速度和方式运行的。
因此,必须有一种合理的交通控制系统来协调它们之间的交通流量,以确保安全和高效的交通。
1、交通流量分析首先,需要对交通流量进行分析。
铁路和公路的交叉路口通常分为两类:一是交叉路口,二是平面路口。
交叉路口主要用于城市的轨道交通系统,而平面路口则主要用于连接铁路和公路。
在分析交通流量时,需要考虑以下几个问题:(1)车辆类型:需要考虑到铁路和公路上不同类型的车辆,例如轿车、巴士、卡车、火车等。
(2)交通流量:需要分析各种类型车辆在不同时段的交通流量,例如早上上班高峰期、下班高峰期、周末等。
(3)行驶速度:不同类型的车辆有不同的行驶速度,需要确定车辆的行驶速度。
2、交通控制器的设计在考虑交通控制器的设计时,需要考虑到以下几个方面:(2)铁路信号:铁路信号应该与交通灯系统同步工作。
铁路交通的控制应该基于切实可行的思路,如等待机制。
铁路信号应该能够自动检测火车,以便及时控制铁路交通。
(3)紧急停车控制:在铁路和公路交叉路口中,紧急停车控制是非常重要的。
需要制定相应的措施,例如在交通灯故障或铁路信号故障时启动紧急停车机制,以保证车辆和乘客的安全。
(4)可靠性和健壮性:交通控制器必须具有可靠性和健壮性。
必须对交通控制器的硬件和软件进行测试,并制定相应的维护计划,以确保交通控制系统正确运行。
3、总结铁路和公路交叉路口的交通控制器设计是一项复杂的任务。
需要考虑到交通流量、交通控制器设计、可靠性和健壮性等方面。
在设计过程中,需与相关单位保持良好沟通,以确保交通控制器的高效和安全。
铁路与公路交叉口自动控制系统设计毕业设计论文
毕业论文声明本人郑重声明:1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。
除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。
对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。
本人完全意识到本声明的法律结果由本人承担。
2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。
本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。
3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。
4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。
论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。
论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。
学位论文作者(签名):年月关于毕业论文使用授权的声明本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。
本人完全了解大学有关保存,使用毕业论文的规定。
同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。
本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。
如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。
本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。
本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。
交通路口智能管理控制系统框架设计
交通路口智能管理控制系统框架设计一、引言随着城市化进程的加快和交通工具的普及,交通路口的管理和控制成为了一个重要的问题。
传统的交通信号灯和交通警察在管理交通路口时存在效率低、资源浪费、安全隐患等问题。
为了解决这些问题,智能交通路口管理控制系统应运而生。
这里将对交通路口智能管理控制系统的框架进行设计。
本文旨在论述交通路口智能管理控制系统的设计和实现,为解决城市交通拥堵和管理提供参考。
二、系统设计目标1.提高交通路口管理和控制的效率和准确性2.减少交通拥堵和塞车3.提高交通安全和节约交通资源4.提高城市交通管理的智能化水平三、系统框架设计1.系统架构交通路口智能管理控制系统的总体结构分为硬件层、软件层和网络层。
硬件层包括传感器、控制器、通信设备等;软件层包括数据处理、决策控制、用户接口等;网络层包括数据传输、信息交换、远程监控等。
2.数据采集与处理交通路口智能管理控制系统需要收集并处理大量的数据,包括车辆密度、车辆类型、车速、交通信号灯状态、天气状况等。
传感器是数据采集的关键部分,包括车辆检测器、摄像头、气象站等。
数据采集后需要进行预处理和分析,以便为决策控制提供数据支持。
3.决策控制决策控制部分是交通路口智能管理控制系统的核心部分,它基于数据采集分析结果,采取相应的控制策略来调整交通信号灯状态和交通流量。
决策控制算法是系统的关键,需要根据实际情况设计智能化、高效的算法,以期实现交通拥堵的最小化和交通安全的最大化。
4.用户接口用户接口是系统与操作人员或管理者进行交互的重要环节,它包括图形界面、语音界面、指令输入等。
用户通过用户接口可以对交通路口进行监控、调度、配置等操作,以实现对交通路口的智能化管理和控制。
5.网络通信网络通信部分是交通路口智能管理控制系统的关键组成部分,它负责系统内部各个部件之间的数据传输和通信,以及系统与外部环境的连接与交互。
网络通信需要保证数据传输的稳定性、可靠性和安全性,确保系统正常运行和数据的准确传输。
交通路口智能管理控制系统框架设计
交通路口智能管理控制系统框架设计1. 引言1.1 研究背景交通路口是城市交通管理中的重要组成部分,其畅通与否直接关系到交通效率和道路安全。
随着城市化进程的不断加快,交通路口的交通流量也越来越大,交通拥堵和事故频发成为了常态。
传统的交通管理方式已经不再适应当今城市交通管理的需求,如何利用先进的技术手段实现对交通路口的智能管理成为了研究的热点之一。
随着物联网、大数据和人工智能等技术的不断发展,智能交通系统逐渐走进人们的视野。
交通路口智能管理控制系统作为智能交通系统的重要组成部分,具有实时监测交通流量、智能识别车辆与行人、自动控制信号灯等功能,可以有效提高交通运行效率,减少交通事故的发生,改善交通环境,优化城市交通资源配置。
本文旨在研究交通路口智能管理控制系统的框架设计,探讨其系统框架设计理念、组成部分、功能设计和特点,旨在为智能交通系统的建设提供参考,同时也为交通管理部门提供科学的决策依据。
1.2 研究目的研究目的是为了探讨交通路口智能管理控制系统的框架设计,在提高交通路口管理效率和减少交通事故发生率的基础上,实现智能化管理和控制。
通过对系统框架设计理念、组成部分、功能设计和特点的深入研究,旨在为交通管理部门和相关机构提供更有效的管理工具和决策支持。
通过系统在交通管理中的应用前景的展望,可以为未来交通管理领域的发展提供参考和指导,推动智能交通管理技术的进步和创新,促进交通系统的健康发展。
通过本研究,将为提高城市交通管理水平、优化道路交通组织和指挥以及改善道路交通安全状况等方面提供有益建议和实践经验,为实现交通系统智能化管理目标奠定坚实基础。
1.3 研究意义交通路口智能管理控制系统在现代城市交通管理中具有非常重要的意义。
这种系统能够有效地提高交通路口的通行效率,减少交通堵塞和交通事故的发生,使交通更加畅通安全。
智能管理控制系统可以实现交通信号的智能化调控,根据实时交通流量的变化来灵活调整信号灯的时间,从而减少交通拥堵问题。
铁路道口控制系统设计改造
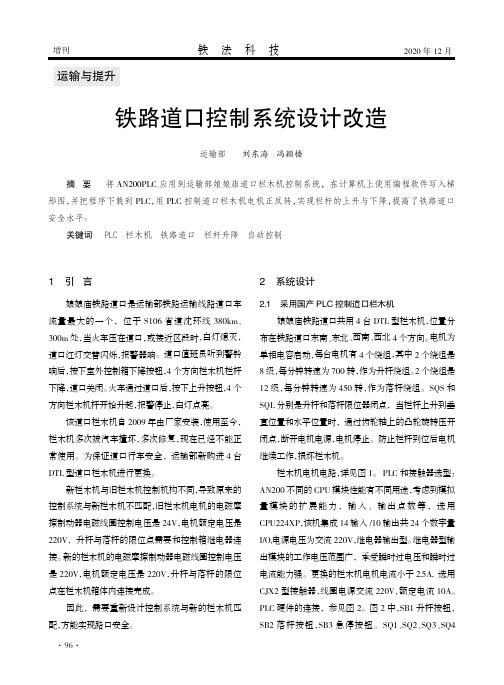
1引言娘娘庙铁路道口是运输部铁路运输线路道口车流量最大的一个,位于S106省道沈环线380km、300m处,当火车压在道口,或接近区段时,白灯熄灭,道口红灯交替闪烁,报警器响。
道口值班员听到警铃响后,按下室外控制箱下降按钮,4个方向栏木机栏杆下降,道口关闭。
火车通过道口后,按下上升按钮,4个方向栏木机杆开始升起,报警停止,白灯点亮。
该道口栏木机自2009年由厂家安装,使用至今,栏木机多次被汽车撞坏,多次修复,现在已经不能正常使用。
为保证道口行车安全,运输部新购进4台DTL型道口栏木机进行更换。
新栏木机与旧栏木机控制机构不同,导致原来的控制系统与新栏木机不匹配,旧栏木机电机的电磁摩擦制动器电磁线圈控制电压是24V,电机额定电压是220V,升杆与落杆的限位点需要和控制箱继电器连接。
新的栏木机的电磁摩擦制动器电磁线圈控制电压是220V,电机额定电压是220V,升杆与落杆的限位点在栏木机箱体内连接完成。
因此,需要重新设计控制系统与新的栏木机匹配,方能实现路口安全。
2系统设计2.1采用国产PLC控制道口栏木机娘娘庙铁路道口共用4台DTL型栏木机,位置分布在铁路道口东南、东北、西南、西北4个方向。
电机为单相电容启动,每台电机有4个绕组,其中2个绕组是8级,每分钟转速为700转,作为升杆绕组。
2个绕组是12级,每分钟转速为450转,作为落杆绕组。
SQS和SQL分别是升杆和落杆限位器闭点,当栏杆上升到垂直位置和水平位置时,通过齿轮轴上的凸轮旋转压开闭点,断开电机电源,电机停止。
防止栏杆到位后电机继续工作,损坏栏木机。
栏木机电机电路,详见图1。
PLC和接触器选型:AN200不同的CPU模块性能有不同用途,考虑到模拟量模块的扩展能力,输入、输出点数等,选用CPU224XP,该机集成14输入/10输出共24个数字量I/O,电源电压为交流220V,继电器输出型。
继电器型输出模块的工作电压范围广,承受瞬时过电压和瞬时过电流能力强。
王雷
二○一三~二○一四学年第一学期信息科学与工程学院自动化系课程设计计划书班级:自动化1101课程名称:微机原理及应用课程设计姓名:王雷学号:201104134015指导教师:蒋峥二○一三年12月22 日一.课程设计的任务:铁路与公路交叉路口的自动交通管理系统某路口是由铁路和公路交叉行程,为保证交通的正常,需要设计一个铁道与公路交叉路口的自动交通管理系统。
设计要求:(1)当检测到铁轨振动(火车将到)时,自动发出警报信号,并控制关闭栅栏,同时公路方向红灯亮。
(2)火车将到时(关闭栅栏后),当检测到铁路上有物体时,自动发出紧急刹车信号,并以急促的声音报警,同时红灯闪烁。
(3)当铁轨震动信号由大到小达到一定程度(火车已过)时,自动解除报警,同时打开栅栏门,公路方向绿灯亮。
二.课程设计的目的:综合运用本课程知识,全面掌握微型计算机及其接口的工作原理、编程和实用方法的重要实践环节。
通过独立提出并论证设计方案,进行软、硬件调试,最后获得正确的运行结果,可加深和巩固对理论教学和实验教学内容的掌握,进一步建立计算机系统整体概念,初步掌握微机硬件开发方法,为以后进行实际的计算机软、硬件应用开发打下良好的基础。
三.总体方案:在8086系统下,通过可编程并行接口8255以及两路DAC0832来实时监测铁路状况,然后通过红绿灯的熄灭来控制控制公路车辆通行,开关栅栏门通过黄灯熄灭来表示。
在红灯亮时,黄灯也亮,同时扬声器报警。
扬声器报警声音频率来反映火车到来和离开。
铁轨振动信号可由振动传感器检测,这里用模拟电压代替,输出的报警信号可参考题目二,指示灯由发光二极管代替,关栅栏门信号由输出开关信号表示,输出的紧急刹车信号由DAC0832的输出模拟信号代替。
四.系统原理图及其电路原理图系统原理图电路原理图由74LS138构成地址译码器80868255信号灯控制部分指示灯通过开关控制灯的亮灭五.附件材料硬件图纸程序清单DATA SEGMENTDATA ENDSSTACK SEGMENTOBUF DW 1000 DUP(?)TOP EQU LENGTH OBUFSTACK ENDSCODE SEGMENTASSUME CS:CODE,DS:DATA,SS:STACKSTART:MOV AX,DATAMOV DS,AXMOV AX,STACKMOV SS,AXMOV SP,TOPCOUNTIUE:MOV DX,60HIN AL,DX ;A端口MOV BL,ALAND BL,01H ;判断PA0的状态CMP BL,1JZ BEGIN ;火车即将到来的判断MOV DX,60HMOV AL,00HOUT DX,AL ;红灯熄灭JMP COUNTIUE ;跳转继续执行BEGIN:MOV BL,ALAND BL,02H ;判断PA1的状态CMP BL,2HJNZ EMERGENCY ;放下栏杆后检测到有火车MOV DX,60 ;放下栏杆后检测到将有火车到来MOV AL,04HOUT DX,AL ;红灯亮起CALL BAOJINGSHENGJMP COUNTIUEBAOJINGSHENG PROC NEARMOV DX,364HMOV BX,0UP:MOV AX,BXOUT DX,AX ;锁存数据MOV DX,366HOUT DX,AX ;输出使能INC BXMOV DX,364HCMP BX,0FFHJNE UPDOWN: MOV AX,BXOUT DX,AX ;锁存数据MOV DX,366HOUT DX,AX ;输出使能DEC BXMOV DX,364HCMP BX,0JNE DOWN ;产生三角波上升沿JMP UPRETBAOJINGSHENG ENDPHONGDENG PROCPUSH AXPUSH CXPUSH DXMOV CX,05HH: MOV DX,60H ;PA端口地址MOV AL,04H ;将PA2端口置1OUT DX,AL ;红灯亮CALL DELAY ;调用延时程序MOV AL,00H ;PA2端口置0OUT DX,AL ;红灯灭CALL DELAYLOOP HPOP DXPOP CXPOP AXRETHONGDENG ENDPJICUBAOJING PROC NEARMOV DX,364HMOV BX,0UP:MOV AX,BXOUT DX,AX ;锁存数据MOV DX,366HOUT DX,AX ;输出使能INC BXMOV DX,364HCMP BX,0FFHCALL DELAY ;延长高电平时间JNE UP ;产生三角波上升沿DOWN: MOV AX,BXOUT DX,AX ;锁存数据MOV DX,366HOUT DX,AX ;输出使能DEC BXCALL DELAYMOV DX,364H ;减缓下降速度CMP BX,0JNE DOWN ;产生三角波下降沿JMP UPRETJICUBAOJING ENDPEMERGENCY:CALL HONGDENGCALL JICUBAOJING ;检测到障碍物,急促报警声CALL SHACHE ;刹车信号JMP COUNTIUESHACHE PROC NEAR;刹车PUSH AXPUSH CXPUSH DXMOV CX,0FHAGAIN:MOV AL,05HMOV DX,360H ;DAC0832片选地址OUT DX,AL ;输出电压CALL DELAY ;延时NOT AL ;取反MOV DX,360HOUT DX,ALCALL DELAYLOOP AGAINPOP DXPOP CXPOP AXRETSHACHE ENDPDELAY PROC NEAR ;延时PUSH CXD: DEC CXJNZ DPOP CXRETDELAY ENDPCODE ENDSEND START六.设计总结为时一周的课程设计让我增长了很多学习汇编语言的经验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可编程序控制器
课程设计报告
院系:电气系
专业班级:自动化10-2
学号:1030130229
姓名:潘晓真
铁路与公路交叉道口护栏自动控制系统设计
一、任务要求
铁路与公路交叉道口护栏自动控制系统设计。
任意方向火车来,压住预告传感器时,将道路右侧向前方向封锁,同时发出警告,让道口区内的车辆快速通过。
压住预告2时,封锁栅栏继续左移,封锁全部道口。
火车通过后,且无另一个方向火车来时,解除封锁,否则继续封锁,继续发出警告。
试列出输入输出分配表,画出plc硬件接线图,列出plc程序清单及注释。
二、系统总体方案
1、此自动控制系统是通过火车触动传感器和plc来实现的。
2、当火车驶入道口,位于两侧的传感器1将会检测到火车从而发出信号到plc。
plc根据程序设定对应输出,使护栏关闭右侧公路路面。
汽车可以顺利驶出道口。
3、计时器开始计时,经过10s后,护栏全部关闭。
4、当火车驶出道口经过传感器3后,10s内传感器发出信号到plc,plc对应输出,解除封锁。
5、当传感器失灵等特殊情况之后通过人工操作也可实现对路面的封锁,是火车安全通过。
同时也可以实现人工复位。
铁路道口传感器分布图:
图1-1(铁路道口传感器分布图)
三、PLC型号选择及其他PLC元器件分配
I/O分配表:
输入信号输出信号名称代号输入点信号名称代号输入点信号感应器1SB1I0.0警告灯L1Q0.0
感应器2SB2I0.1护栏半封锁L2Q0.1
感应器3SB4I0.2护栏全封锁L3Q0.2
感应器4SB5I0.3电机正转L4Q0.5
手动半封锁SB3I0.4电机反转L5Q0.6
手动全封锁SB6I0.5
行程半封锁SA1I0.6
行程全封锁SA2I0.7
电机复位SA3I1.0
手动全复位SA4I1.1
表1-1( I/O分配表)
四、PLC控制系统硬件接线图
图1-2( plc控制系统硬件接线图)
六、程序框图和设计软件截图
程序框图:
图1-3(程序框图)梯形图:
七、实验结果:
1、输入编写的梯形图,按照plc硬件接线图连线。
传感器由点触开关代替,Q0.0,Q0.1,Q0.2,Q0.5,Q0.6分别接指示灯1、
2、
3、
4、5。
2、按下SB1,L1、L2灯亮,电动机正转护栏关闭右侧公路面、放出警告,到达行程开关SA1后自动停止。
3、按下SB2后,L3灯亮,电动机继续正转护栏封锁全部路面。
到达行程开关SA2后自动停止。
4、当火车经过传感器3且10s后无火车再来时系统自动解除封锁。
10s之后有货车来时继续封锁,直到火车完全经过时解除封锁,以此类推。
5、当传感器失灵时通过手动操作可以实现对交通的控制作用。
(1)、按下SB3,L1、L2灯亮,电动机正转护栏关闭右侧公路面、放出警告,到达行程开关SA1后自动停止。
(2)、按下SB6后,L3灯亮,电动机继续正转护栏封锁全部路面。
到达行程开关SA2后自动停止。
(3)、当暂时没有货车来时按下SA3,电机复位,解除封锁。
当有火车来时继续封锁,直至火车安全经过为止。
七、心得体会和参考资料
心得体会:
通过编写梯形图使我巩固了我所在课本上所学到的理论知识,
使理论知识更好的与操作相结合理解更加透彻,也使自己了解到自己所存在的不足,在以后的学习中不断完善,不断总结以提高自己的能力。
通过本次plc课程设计,使我更好的认识plc和熟悉有关的plc 有关知识,为以后的学习和工作奠定了良好基础。
参考资料:
【1】吉顺平.S可编程序控制原理及应用,北京:机械工业出版社.2009 【2】常晓玲.电气控制系统与可编程控制器,北京:机械工业出版社.2004
(注:可编辑下载,若有不当之处,请指正,谢谢!)。