基于LabVIEW的控制系统仿真毕业设计
毕业设计基于LabVIEW控制系统分析与设计

本文的研究和应用主要基于NI公司的虚拟仪器产品(包括硬件模块和虚拟仪器开发软件LabVIEW及控制设计包和仿真模块)。本研究主要是利用LabVIEW及其控制设计包和仿真模块建立受控对象模型,并分析其开环动态特性,然后对控制系统进行设计,最后进行动态系统仿真。具体是从以下几个方面内容进行的。
LabVIEW (Laboratory Virtual Instrument Engineering Workbench) is a topping VI software. It has strong points such as outstanding man-machine interface, powerful data acquisition and graphical programming language, etc. On account of these good qualities, it is gaining an increasing number of engineers’ recognition.
2.1 虚拟仪器概述
2.1.1 虚拟仪器的概念
所谓虚拟仪器,就是在以计算机为核心的硬件平台上,其功能有用户设计和定义,具有虚拟面板,其测试功能由测试软件实现的一种计算机仪器系统,它由高效的软件、模块化I/O硬件和用于集成的软硬件平台这三大部分组成。虚拟仪器的实质是利用计算机显示器的显示功能模块来模拟传统仪器的控制面板,以多种形式表达输出检测结果;利用计算机强大的软件功能实现信号数据的运算、分析和处理;利用I/O接口设备完成信号的采集、测量与调理,从而完成各种测试功能的一种计算机仪器系统。使用者用鼠标或键盘操作虚拟面板,就如同使用一台专用测量仪器一样。虚拟仪器的出现,使测量仪器与计算机的界限模糊了[1]。与传统仪器相比,虚拟仪器具有技术性能高、扩展性强、开发周期短、易于更新升级、硬件成本低,以及出色的集成等诸多优势。
基于LabVIEW与Proteus的测控仿真实验系统设计
基于LabVIEW与Proteus的测控仿真实验系统设计周春明【摘要】A method of design of measurement and control simulation experiment system based on LabVIEW and Proteus was proposed with the remote temperature controlling system as an example. AT89C51 in Proteus was used as the slave computer to achieve the functions of temperature acquisition, A/D conversion and data transmis-sion to the host computer. LabVIEW was employed to construct the master system to achieve the PID control of the received temperature. It transmitted the PID adjustmentdata to SCM in order to adjust its PWM wave’ s duty rati-o. So the working state of“OVEN” could be controlled and the purpose of the remote temperature controlling could be achieved. The master system communicated with the slave computer by a pair of virtual serial ports constructed by Virtual Serial Port Driver 6 . 9 . Simulation results demonstrated the validity of the methods of design of measure-ment and control system. It has a practicability in the field of experiment teaching and project development.%以单片机远程温度控制系统为例,给出了一种基于LabVIEW与Proteus的测控仿真实验系统的设计方法,利用Proteus中的AT89 C51单片机仿真下位机运行,实现温度的采集、 A/D转换器的控制及向上位机传输数据等功能。
LabVIEW软件控制系统的设计和仿真入门
利用LabVIEW软件进行控制设计和仿真入门这个章节将集中介绍LabVIEW软件中的控制系统设计的基本特性。
我们在这里假定读者们已经熟悉了LabVIEW软件的其它部分。
(如果你对LabVIEW软件的其它部分不熟悉,请参考Robert H. Bishop的‘Learning with LabVIEW’)。
每一章的专用信息会包含在那一章的简介中在我们开始之前,请确保你的计算机上已经安装了可使用的控制设计和仿真工具包。
它们不是LabVIEW 基本软件的一部分,而是需要单独购买的。
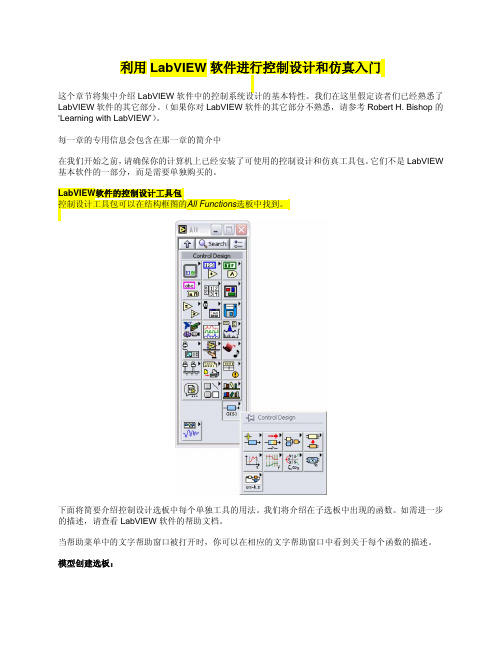
LabVIEW软件的控制设计工具包控制设计工具包可以在结构框图的All Functions选板中找到。
下面将简要介绍控制设计选板中每个单独工具的用法。
我们将介绍在子选板中出现的函数。
如需进一步的描述,请查看LabVIEW软件的帮助文档。
当帮助菜单中的文字帮助窗口被打开时,你可以在相应的文字帮助窗口中看到关于每个函数的描述。
模型创建选板:这节中的函数用于创建各种类型的模型,例如状态空间模型、传递函数模型和零点/极点/增益模型等。
下面将讨论创建状态空间模型和创建传递函数模型函数。
控制设计工具包中的创建状态空间模型函数的端子如上图所示。
如果采样间隔端子没有连接,那么系统被默认为是连续采样。
将一个值连到采样间隔端子上会使系统变为离散系统,它使用给定的时间作为采样间隔。
状态空间模型的A、B、C、D 矩阵都有对应的端子。
一旦LabVIEW软件创建了状态空间模型(其输出端子可用),该模型就可以用于其它函数并且可以转化成其它的形式,在这一节里我们将进行更加深入的讨论。
下面就是创建状态空间模型的一个例子。
它的输出端可以连接到控制设计工具包中很多其它函数上,作为它们的输入端。
输入端子既可以是常数(在结构框图中),也可以是控制量(在前面板中)。
为了使这个手册更容易理解,我们演示的大多数例子都是在结构图中使用常数,但是,使用前面板上的控制量时常会使效率更高。
基于labview的交通灯系统设计毕业设计(论文)
毕业设计(论文)题目基于labview的交通灯系统设计毕业设计(论文)原创性声明本人郑重声明:所提交的毕业设计(论文),是本人在导师指导下,独立进行研究工作所取得的成果。
除文中已注明引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写过的作品成果。
对本研究做出过重要贡献的个人和集体,均已在文中以明确方式标明并表示了谢意。
论文作者签名:日期:年月日摘要随着社会的发展社会节奏越来越快,人类代步工具也越来越多,经常发生交通拥堵和交通事故。
在大城市人流量的增多更加增加了交通负荷经常发生交通事故。
城市高速道路建设完成的初期,它们也曾有效地改善了交通状况。
然而,随着交通量的快速增长和缺乏对高速道路的系统研究和控制,高速道路没有充分发挥出预期的作用。
而城市高速道路在构造上的特点,也决定了城市高速道路的交通状况必然受高速道路与普通道路耦合处交通状况的制约。
因此,开发一套能够社会服务的交通灯控制器将是非常必要和及时的。
有童谣“红灯停,绿灯行,黄灯亮了等一等”由此可见交通信号灯对交通安全的重要性。
实现十字路口信号灯控制系统的方法有很多,可以通过可编程控制器PLC、单片机、标准逻辑器件等方案实现。
但是这些控制方法的功能修改及调试都需要硬件电路的支持,在一定程度上增加了设计难度,提高了设计成本。
虚拟仪器技术就是利用高性能的模块化硬件,结合高效灵活的软件来完成各种测试、测量和自动化的应用。
自1986年问世以来,世界各国的工程师和科学家们都已将NI LabVIEW 图形化开发工具用于产品设计周期的各个环节,从而改善了产品质量、缩短了产品投放市场的时间,并提高了产品开发和生产效率。
使用集成化的虚拟仪器环境与现实世界的信号相连,分析数据以获取实用信息,共享信息成果,有助于在较大范围内提高生产效率。
虚拟仪器提供的各种工具能满足我们任何项目需要。
美国国家仪器公司NI(National Instruments)最早提出的虚拟测量仪器(VI)概念,引发了传统仪器领域的一场重大变革,使得计算机和网络技术得以长驱直入仪器领域,和仪器技术结合起来。
基于labview的液位测控系统设计--大学毕业设计论文
摘要液位计算机测量与控制实验系统是为西北工业大学航空学院民航工程系综合实验平台而开发的课程教学实验系统。
液位测量与控制系统集传感器信号的采集、调理、转换、检测和控制为一体,是实时交互式图形界面应用系统。
该系统采集液位信号并用计算机可视化界面实时显示液位高度的变化过程;通过交互式对话框设置期望的液位高度,在检测当前液位的基础上控制进/出水阀门,从而对实际液位高度进行控制。
论文介绍了液位计算机测量与控制系统的结构与功能;分析了硬件系统中测量与控制电路的组成及工作原理;计算了信号调理电路中测量放大器的增益及各元件参数;使用PROTEL软件绘制了信号调理电路图;介绍了多功能数据采集卡NI USB-6008的特点、功能及软件开发平台LabVIEW;分析了系统的软件程序;介绍了液位计算机测控系统的用户使用界面所能实现的功能。
针对实验系统对液位进行开关控制所带来的问题,提出了用PID控制方法进行改进的措施。
关键词:液位测控,压力传感器,信号调理,NI USB-6008 ,LabVIEWABSTRACTThe liquid level measurement and control computer experimental system is a course teaching experimental system which is used to develop the comprehensive experimental platform for Aviation Institute of Civil Engineering of NWPU. The liquid level measurement and control system with real-time interactive graphical interface is of the sensor signal acquisition, conditioning, conversion, testing and control functions. The system acquires the signals of liquid level and computer interface real-time to show the liquid level changing process. Through an interactive dialog box, the desired water level is set. The actual water level is controlled based on the current liquid level detection through the import / outlet valves.The structure and function of the liquid level measurement and control computer experimental system is introduced at first. The hardware system composition and working principle is analyzed, and the gain and each components parameters of measuring amplifier in signal conditioning circuit are calculated. The signal conditioning circuit is drawn with PROTEL, and the features and functions of the multi-function data acquisition card NI USB-6008 and software development platform LabVIEW are introduced. The system software program is also analyzed. For the control problems of import / outlet valves of the liquid level measurement and control computer experimental system, a PID control method is proposed to improve the system performances.KEY WORDS:liquid level measurement and control,pressure sensor,signal conditioning ,NI USB-6008 ,LabVIEW目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 课题背景............................................................................. 错误!未定义书签。
基于LabVIEW的毕业设计

基于LabVIEW转子轴心轨迹测量与识别系统开发摘要转子轴心轨迹作为转子振动状态的一类重要图形征兆,包含了大量的故障信息,是诊断专家在诊断过程中采用的一项不可缺少的故障征兆信息,由于轴心轨迹的提纯效果、轴心轨迹的特征自动提取和形状自动识别的水平,都直接影响着故障诊断专家系统的智能化水平,因此我们需要对轴心轨迹全面的进行研究。
首先搭建了转子故障实验台,在该实验台上能够模拟一些典型的转子故障,如不平衡、不对中、转子弯曲等。
在此基础上,搭建信号测量电路,包括传感器、电荷放大器、滤波器、数据采集卡等器件,能够测量转子旋转时的两个相互垂直方向的径向位移。
其次编制轴心轨迹测量及识别程序,该程序能够实时显示轴心轨迹,并进行频谱分析,也可以进行数据的存储。
为了给轴心轨迹识别提供标准,进而编制了轴心轨迹仿真程序,对几种典型故障的轴心轨迹进行了仿真。
根据不变矩理论,编制了不变矩计算程序,通过对传统算法的改进,实现了对离散数据的不变矩计算,改进算法能够自动识别轴心轨迹。
通过连接实验台、测量装置和软件应用程序,对整个系统进行了整合,可实时显示轴心轨迹,同时计算不变矩。
通过大量实验确定识别临界值,使程序既满足灵活性又满足准确性,有效实现在线自动识别。
关键词:轴心轨迹;虚拟仪器;LabVIEW;不变矩Development of measurement and identification of axis orbit system on LabVIEWAbstractThe rotor axis path as a kind of important graphic sign of rotor vibration state contains a large number of fault information is used in the process of diagnosis expert in the diagnosis of an indispensable fault symptom information.Axis path due to the effect of purification, the axis trajectory characteristics of the level of automatic extraction and automatic shape identification, directly affects the level of intelligent fault diagnosis expert system,So we need the axis trajectory comprehensive research.First set the rotor fault test-bed in the laboratory bench to simulate some of the typical rotor faults, such as imbalance, in the wrong, rotor bending, etc. On this basis, the structures, signal measuring circuit, including the data acquisition card, sensor, charge amplifier and filter device, to measure the axis trajectory radial displacement of two directions.Second axis trajectory measurement program, the program can real-time display the axis trajectory, and spectrum analysis, can also for data storage. To provide standards for axis path identification, and then compiled the axis trajectory simulation program, the axis trajectory of several typical faults are simulated.The recognition system is used as a means for identifying, invariant moment invariant moment calculation program, therefore, according to the features of the experiment, the moment invariant algorithm was improved, in order to meet the automaticidentification.Finally integrate the compiled program can display the axis trajectory and moment invariant can be calculated, and through experiments to determine the identification of the critical value, satisfies program meets the flexibility and accuracy, effectively realize online automatic identification. Key words:Axis trajectory;Virtual instrument; LabVIEW; Invariant moments目录摘要 (I)Abstract (II)第1章绪论................................................ - 1 -1.1 课题的背景................................................................................... - 1 -1.2 国内外研究现状........................................................................... - 2 -1.2.1 旋转机械轴心轨迹研究现状 ............................................. - 2 -1.2.2 转子轴心轨迹自动识别研究现状 ..................................... - 2 -1.3 研究的意义和主要内容 ............................................................... - 4 -1.3.1 研究的意义......................................................................... - 4 -1.3.2 研究的主要内容................................................................. - 4 - 第2章转子振动机理和轴心轨迹特征 ......................... - 6 -2.1 旋转机械振动机理分析 ............................................................... - 6 -2.2 转子振动的基本特征 ................................................................... - 7 -2.3 常见故障原因及轴心轨迹的特征 ............................................... - 8 -2.3.1 转子不平衡......................................................................... - 8 -2.3.2 转子不对中......................................................................... - 9 -2.3.3 转子弯曲............................................................................. - 9 -2.3.4 转子碰磨........................................................................... - 10 -2.3.5 油膜震荡........................................................................... - 11 -2.4 轴心轨迹测试方法及信号分析 ................................................. - 12 -2.5 本章小结..................................................................................... - 14 - 第3章 LabVIEW应用程序设计............................... - 16 -3.1 数据采集和轴心轨迹合成 ......................................................... - 16 -3.2 轴心轨迹仿真程序..................................................................... - 19 -3.3 不变矩计算程序......................................................................... - 21 -3.3.1 不变矩方法简介............................................................... - 21 -3.3.2 不变矩计算方法............................................................... - 22 -3.4 相似度计算程序......................................................................... - 24 -3.5 轴心轨迹自动识别程序 ............................................................. - 25 -3.6 本章小结..................................................................................... - 26 - 第4章实验系统与实验结果................................. - 27 -4.1 实验台的结构设计..................................................................... - 27 -4.2 测量装置..................................................................................... - 28 -4.2.1 传感器与测量电路 ........................................................... - 28 -4.2.2 数据采集卡....................................................................... - 29 -4.2.3 数据采集卡基本性能指标 ............................................... - 30 -4.3 实验结果分析............................................................................. - 31 -4.4 本章小结..................................................................................... - 32 - 结论...................................................... - 33 - 致谢...................................................... - 34 - 参考文献.................................................. - 35 - 附录...................................................... - 37 -第1章绪论1.1课题的背景旋转机械是机械设备的重要组成部分并且占有相当大的比重,如机械、化工、电力、冶金等行业的机床、汽轮机、发电机、压缩机等都是典型的旋转机器,它们以转子及其他回转部件作为工作的主体,一旦发生事故将造成巨大损失。
基于LabVIEW的控制系统仿真(毕业设计论文)

摘要
在控制理论教学和实验中,存在着设备短缺、教学手段单一等问题,采用虚拟控制系统实验方式可有效地解决这些问题。本文对控制系统仿真的意义与研究现状作了介绍,提出并确定了基于LabVIEW的控制系统仿真的实施方案。应用NI公司的LabVIEW 2009、控制设计工具包作为软件开发工具,实现了控制系统的建模、分析与设计这一系列过程的计算机仿真。经过编写程序和发布应用程序,最终开发出了一种交互式实验教学系统。该系统包含信号发生器、典型环节、质点-弹簧-阻尼器系统和一级倒立摆系统四个子模块,用户可进行控制系统建模、性能分析、PID设计、LQR设计等方面的研究。各个子模块运行良好,整个系统具有操作简单、界面友好和实时交互的特点;对于教学和实验的改革和创新具有一定的指导意义。
1.2
随着计算机仿真理论与技术的发展,目前各个科学与工程领域均已开展了仿真技术的研究。系统仿真是通过对系统模型的实验,研究一个存在或设计中的系统。系统仿真技术已经被公认为是一种新的实验手段,在科学与工程领域发挥着越来越重要的作用。
早期的控制系统设计可以由纸笔等工具容易地计算出来。但随着控制理论的迅速发展,只利用纸笔以及计算器等简单的运算工具难以达到预期的效果,加之计算机领域取得了迅速的发展,于是很自然地出现了控制系统的计算机辅助设计方法。控制系统的计算机辅助设计技术的发展目前已达到了相当高的水平,并一直受到控制界的普遍重视。
(2)控制理论中典型实例选择与理论分析
选取控制理论教学和实验中常见的、典型的实例,完成其理论方面的建模、分析、设计。
(3)控制模型相应的仿真VI设计
在(2)的基础上,基于LabVIEW2009平台,使用必要的工具包完成建模、分析、设计的相应的VI设计,完成控制系统仿真的主要程序设计。
基于labview软件的控制界面设计毕业设计论文
Thisworkfirst introduces the virtual instrument and the development status and application of LabVIEW.Itintroduces the data analysis control interface of several modules, includingthedata manipulation module,theFFT transform module,thefilter processing module and the specific Chirp signal analysis module.In thiswork, the specific functions of each module have beenrun successfullyin LabVIEW environment.
仪器功能
用户能够根据自己的需要定义仪器的功能,可以灵活多变
只有厂商能定义仪器功能,功能不能改变,过于单一
结构开放性
开放式的结构,灵活,可与计算机技术保持同步,有很多支持厂家
封闭、固定,兼容性差
互联性能
与网络及其他周边设备方便互联的、面向应用的仪器系统
功能单一、互联有限的独立设备
操作界面
图形化界面,操作简单
涉密论文按学校规定处理。
基于LabVIEW的自控原理实验系统的设计论文
武汉纺织大学毕业设计(论文)任务书课题名称:基于LabVIEW的自控原理实验系统的设计完成期限:2015年1月1日至2015年5月24日学院名称机械工程与自动化学院专业班级自动化1102学生姓名杜健学号 1102081057 指导教师张海霞指导教师职称讲师学院领导小组组长签字一、课题训练内容(1) 通过毕业设计培养学生综合应用能力,巩固与扩展所学的基础理论和专业知识,培养学生独立分析、使用计算机解决实际问题的能力;(2) 通过毕业设计,培养学生正确的设计思想、理论联系实际的工作作风、严肃认真的科学态度、团结协作的团队精神;(3) 训练收集查找LabVIEW虚拟实验系统设计和自动控制原理实验的中外文专业资料及对文献的阅读与翻译能力;(4) 学习相关的背景知识,训练用LabVIEW来进行虚拟实验系统的设计与仿真;并学会用Matlab来编程进行仿真验证所设计系统的正确性;(5) 训练查找错误及解决问题能力;(6) 训练工程设计及实验研究能力;(7) 训练计算机仿真编程及应用能力,提高系统软件设计和开发的能力;(8) 通过对已完成的工作进行整理,以及毕业设计论文的撰写和毕业答辩,使学生的书面和口头表达能力得到进一步的训练和提高。
二、设计(论文)任务和要求(包括说明书、论文、译文、计算程序、图纸、作品等数量和质量的具体要求)1.设计任务学习虚拟仪器软件LabVIEW,利用LabVIEW设计所学过的自动控制原理实验系统:(1)一阶系统虚拟实验设计;(2)二阶系统虚拟实验设计;(3)系统根轨迹的绘制虚拟实验设计;(4)系统Nyquist图的绘制虚拟实验设计;(5)系统Bode图的绘制虚拟实验设计;(6)串联校正虚拟实验设计。
(7)非线性系统虚拟实验设计最后通过学习计算机仿真软件Matlab,对所设计系统进行验证。
2.设计要求(1)提交开题报告一份,提交时间3月10日左右,字数在2000~3000字之间,内容需包含课题意义,所属领域的发展状况,本课题的研究内容、研究方法、研究手段和研究步骤以及参考书目等;(2)提交毕业设计论文一份,正文在15000字左右,按照武汉纺织大学毕业设计模版格式要求规范撰写;(3)翻译一篇与本课题相关的英文专业资料,其对应的中文翻译在4000字左右;(4)设计程序,图表完整齐备;(5)实时进行LabVIEW仿真。
毕业设计题目--构建基于labview的模电虚拟实验系统(毕业设计题目含完整vi下载地址)
基于LabVIEW的虚拟模电实验的构建————调制解调器摘要:虚拟技术的发展使模拟电子技术实验的分析设计过程得以在计算机上轻松、准确、快捷地完成。
这样,一方面克服了实验室在元器件和规格上的限制,避免了损坏仪器等不利因素,另一方面使得实验不受时间及空间的限制,从而促进模拟电子技术实验教学的现代化。
本文介绍了基于LabVIEW的模拟电子技术实验系统——虚拟调制解调器的设计与实现。
此系统具有参数调节方便、易实现、可靠度高等优点。
在高等工程教育中采用虚拟实验室,可以从根本上解决实验与实习经费严重短缺问题。
作为传统电子技术实验的补充,使学生初步掌握仿真软件技术,可使实验内容紧密联系课本内容,比较全面地概括和反映部分所学的知识点,将课堂内容具体化。
关键词:LABVIEW 模拟电子技术虚拟实验调制解调器Abstract:The development of virtua technology that makes the analysis design course of simulated electronic technology test have in computer on relaxed , accurate is completed shortcutly.In this way, it overcame laboratory's limit on electronic component and standard. Meanwhile, laboratory wasn't limited on time and space, and it accelerated experiment teaching's modernization about simulated electronic technology test.This paper has introduced the simulated electronic technical experiment system based on LabVIEW——realization and the design of virtua modem. This system has parameter regulation convenient, easy realization and reliability higher advantage. In higher project education, adopt virtua laboratory , can solve experiment and practice funds serious scarce problem from foundation. As the supplement of traditional electronic technical experiment make student preliminary grasp emulation software technology, it can make experiment content close connection textbook content, comparison summarizes and reflects all-sidedly that the knowledge that studied partially is counted , will classroom content melt specificlyKeywords:virtua simulated electronic technology test Modem1绪论1.1虚拟仪器1.1.1 虚拟仪器的概念虚拟仪器的概念最早由美国N工公司于1895年提出n,其英文原称为Vrul Instrument,简称vi。
利用LabVIEW进行控制系统设计和仿真
利用LabVIEW进行控制系统设计和仿真随着科技的发展和技术的不断进步,控制系统在工业自动化和实验室研究中起着至关重要的作用。
而LabVIEW作为一款流行的程序设计和开发环境,具有强大的功能和灵活的应用性,被广泛用于控制系统设计和仿真。
本文将介绍如何利用LabVIEW进行控制系统设计和仿真,以及该软件在实践中的应用。
一、LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国国家仪器公司(National Instruments)开发的一种基于图形化编程的集成开发环境(IDE)。
它以可视化方式与仪器设备和测量设备进行交互,提供了一个灵活、高效而又直观的开发平台。
LabVIEW具有模块化的设计、多线程并行处理、易于调试和可视化的优势,被广泛用于测量、控制和数据采集等领域。
二、LabVIEW在控制系统设计中的应用1. 系统建模与仿真利用LabVIEW,可以将复杂的控制系统建模,并对其进行仿真分析。
LabVIEW提供了丰富的信号处理和系统建模的工具箱,可以通过拖放组件和连接线,搭建系统模型。
通过调整参数和输入信号,可以模拟系统不同的工作状态,快速验证和优化控制策略。
2. 实时控制与数据采集LabVIEW的强大之处在于其实时控制和数据采集的能力。
通过与硬件设备的交互,LabVIEW可以快速实现对进程或系统的实时控制,并实时采集数据并进行处理。
这对于工业自动化和实验室研究提供了便利,同时也为数据分析和算法优化提供了基础。
3. 界面设计与人机交互LabVIEW具有友好的界面设计和人机交互功能。
通过LabVIEW的界面编辑器和可视化控件,可以轻松创建出美观、直观的用户界面,并实现与用户的交互。
这对于操作员的实时监控和系统操作提供了便利,提高了整体系统的可用性和易用性。
三、利用LabVIEW进行控制系统设计和仿真的案例下面以一个汽车制动控制系统为例,简要介绍如何利用LabVIEW 进行控制系统设计和仿真。
基于LabVIEW的自动控制原理虚拟实验系统设计

基于LabVIEW地自动控制原理虚拟实验系统设计学生姓名:熊汉鑫班级:090432指导老师:刘清平摘要:根据“自动控制原理”课程实验教案在高校实验实践中遇到地困难和实验教案改革地需要,本文提出了建立基于Labview地自动控制虚拟实验系统方案.文中分析了目前常见地虚拟实验系统,相应地应用Labview编程语言实现了包含“自动控制原理”课程常见实验地虚拟实验系统.最后,利用Matlab语言编程进行对比分析,进行正确性验证.关键词:Labview;自动控制实验;Matlab指导老师签名:Automatic control theory virtual experiment based on LabVIEW System design Student name :xionghanxin Class: 090432Supervisor: liuqinpingAbstract:On the basis of problems encountered in actual experiment teaching of Automatic Control Theory in universities and need of experiment teaching revolution,a new kind of automatic control theory virtual experiment system based on Labview is advanced.Strong-point and weadness of common virtual experiment systems at present are analyzed and a virtual experiment system including common experiments in Automatic Control Theory is compleleted successfully using Labview equivalently.In addition,proposal for hardware experiment expansion is put forwand.At last,Matlab programming is used for comparison and accuracy certification.Keywords:Labview。
基于LabVIEW的自动控制仿真系统设计[1]
![基于LabVIEW的自动控制仿真系统设计[1]](https://img.taocdn.com/s3/m/5c5989325a8102d276a22f45.png)
D =
0 0 0
R = 1 ,Q =
K = lqr ( A , B , Q , R ) = [ - 1. 5166 23. 9718
- 1. 7244 3. 2899 ]
图9 倒立摆程序流程图
( 下转第 475 页)
© 1994-2006 China Academic Journal Electronic Publishing House. All rights reserved.
防工业出版社 ,2001. 1292184.
[2] 隗永安 . 现代通信原理 [M] . 成都 : 西南交通大学出版社 ,2002. 2122 236. [3] 罗伟雄 ,韩 力 ,原东昌 ,丁志杰 . 通信原理与电路 [M] . 北京 : 北京
理工大学出版社 ,1998. 2742310.
1 引 言
高等教育一直强调动手能力的重要性 , 学校为了 提高学生解决实际问题的能力 , 改进实验设备必然是 改革过程中重要的一环 。培养在数据采集和分析 、 构 建物理系统 、 计算机仿真系统方面有经验的大学毕业 生 ,既是现代化大学的目标也是应社会所要求 。 利用 LabVIEW 界面仿真工具包在 LabVIEW 界面 下控制 Simulink 模型 , 从而建立起基于 LabVIEW 的自 动控制仿真系统 。设计所涉及的实验不但包括本科阶 段基础的通过阶跃响应来验证系统传递函数中各参数 对系统的影响 ,通过频率响应法得到的波特图验证系 统频率特性 ,积分分离 PID 实验 ,还简单涉及到倒立摆 的阶跃响应过渡过程在 LabVIEW 中形象化表现 。
安 : 西安电子科技大学出版社 ,2002. 482356.
[6] 侯伯亨 ,顾 新 . VHDL 硬件描述语言与数字逻辑电路设计 [M] . 西
基于LabVIEW的步进电机控制毕业设计
编号:审定成绩:重庆邮电大学毕业设计(论文)设计(论文)题目:基于LabVIEW的步进电机控制摘要随着电机在工业、农业等领域的广泛应用,步进电机也越来越到多地运用到众多领域。
步进电机是一种将电脉冲信号转换为角位移的机电元件,与其它类型电机相比具有易于精确控制、无累积误差等优点, 它可以在宽广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反转控制等. 步进电动机必须和驱动控制器配合使用,而不能直接接到交直流电源上工作, 步进电机的控制以数字I/O接口卡作为硬件基础,采用软件程序来实现步进电机的同步精确运动控制。
这种控制方法的关键是软件程序,软件程序的好坏将决定是否能实现步进电机的控制。
本设计采用PC机控制,通过PXI总线与步进电机相连,PC 上的操作界面采用LabVIEW 编写,文中简要概述虚拟仪器技术LabVIEW软件的特点,通过运用LabVIEW图形编程语言设计步进电机的简单控制系统,介绍虚拟仪器编程的一般过程和方法。
这种用LabVIEW设计的系统具有控制灵活、人机交互性强、界面友好、操作方便等特点。
本系统的设计为虚拟仪器的设计寻找了一种普遍的方法。
【关键词】步进电机,LabVIEW,PXI总线ABSTRACTThe stepper motor are more and more widely used in many fields as the electrical machines widely used in industry, agriculture and other fields. The stepper motor is an electromechanical device that converts electrical pulses signal into discrete step angle. Because of the advantage of precision and non-cumulative error compared with the other styles. It can regulate rate, quickly rise-stop, positive reverse controlling and brake etc by changing the wide frequency of pulse, and so on. The stepper motor must to be connected to a special equipmen t—stepper motor driver that it can be working properly. And it can not be connected to AC.DC. A software program is adopted to realize precision motion control of stepper motor taking a digital I/O card as the hardware base of stepper motor control.The key of this control method is the software program, which decides whether the control can be realizedThis design is controlled by Person Computer. Connect to stepper motor withP X I bus. The operating interface of PC is compiled with LabVIEW. The paper gives a brief overview of the features of LabVIEW in virtual instrument technology.Through the use of LabVIEW graphical programming language to design a simple stepper motor controller system,the programming process and methods are introduced.The system has such features as flexibility to control,well-designed human—computer interaction,good interface, etc. The design of this systemic can search a universal method for the virtual instrument.【Key words】stepper motor,LabVIEW,PXI bus目录前言 (1)第一章步进电机系统概述 (3)第一节步进电机的介绍 (3)一、步进电机的分类 (4)二、步进电机的工作原理 (5)三、步进电机的细分和正反转控制 (7)四、步进电机的工作性能和参数介绍 (8)第二节步进电机的驱动 (8)第三节接口设计 (10)第四节应用软件的介绍 (10)第二章系统的总体设计 (12)一、系统数据采集设备及接口的介绍 (12)二、数据采集系统的介绍 (13)第三章系统硬件设计 (15)一、PC机对步进电机的控制 (15)二、数据采集卡和接口总线的选择 (15)三、步进电机的选择 (18)第四章系统软件设计 (19)一、主程序的设计 (19)二、步进状态程序的设计 (22)三、sub子VI的设计 (26)结论 (29)致谢 (30)参考文献 (31)附录 (32)一、英文原文 (32)二、英文翻译 (38)前言步进电机是将电脉冲信号转变为角位移或线位移的执行元件。
基于LabVIEW的工业控制系统设计与仿真

基于LabVIEW的工业控制系统设计与仿真工业控制系统是现代工业生产中不可或缺的一部分,它通过对生产过程中的各种参数进行监测、控制和调节,实现对生产过程的自动化管理。
LabVIEW作为一款强大的图形化编程软件,在工业控制系统设计与仿真领域有着广泛的应用。
本文将介绍基于LabVIEW的工业控制系统设计与仿真的相关内容,包括LabVIEW在工业控制系统中的优势、设计流程、仿真技术等方面的内容。
LabVIEW在工业控制系统中的优势LabVIEW是由美国国家仪器公司(National Instruments)开发的一款图形化编程软件,其主要特点是使用图形化的方式进行编程,用户可以通过拖拽、连接各种功能块来实现程序的编写。
在工业控制系统设计中,LabVIEW具有以下优势:易学易用:LabVIEW采用直观的图形化编程方式,不需要深入的编程知识即可上手使用,降低了学习成本。
高效性:LabVIEW具有丰富的函数库和工具包,可以快速实现各种功能,提高了开发效率。
跨平台性:LabVIEW支持多种操作系统,可以在不同平台上运行,具有较好的通用性。
可扩展性:LabVIEW支持第三方组件和插件的集成,用户可以根据需要扩展功能。
1. 系统需求分析在设计工业控制系统之前,首先需要进行系统需求分析。
这包括对生产过程中需要监测和控制的参数进行明确定义,确定系统的输入输出接口、响应时间要求等。
2. 系统架构设计根据需求分析结果,设计工业控制系统的整体架构。
包括硬件选型、传感器/执行器选择、通信协议等方面。
3. 控制算法设计根据系统需求和架构设计,设计合适的控制算法。
这包括PID控制、模糊控制、神经网络控制等方法。
4. 界面设计与编程利用LabVIEW进行界面设计和程序编写。
通过拖拽功能块、连接线实现程序逻辑,并设计人机交互界面。
5. 调试与测试完成程序编写后,进行调试和测试。
验证系统是否符合需求,并进行必要的调整和优化。
工业控制系统仿真是在实际硬件设备尚未建立之前,通过软件模拟整个系统运行过程,以验证系统设计的正确性和可靠性。
labview的毕业设计
labview的毕业设计【篇一:定稿 labview毕业设计】基于labview的图像分割程序设计[摘要] 现在图像处理技术已经应用于多个领域当中,其中,纸币识别,车牌识别,文字识别和指纹识别已为大家所熟悉。
图像分割是一种重要的图像技术,它不仅得到了人们的广泛重视和研究,也在实际中得到了大量的应用。
它是处理图像的基本问题之一,是图像处理图像分析的关键步骤。
图像识别的基础是图像分割,其作用是把反映物体真实情况的,占据不同区域的,具有不同性质的目标区分开来,并形成数字特性。
关于图像分割的方法已有上千种,本文将介绍几种主流的方法,并分析各自的特性,利用labview平台实现两种阈值方法分割图像,展现实验现象,比较两种方法的处理结果。
[关键词] 图像分割阈值法大津法双峰法 labviewthe program designing of image segmentation based on labview[abstract] image processing technology has been used in many fields, the banknote recognition, license plate recognition, character recognition and fingerprint recognition has been familiar to everyone. image segmentation is an important image technology, people not only attach importance to it and research it,but also use it in many place. it is one of the basic problems of the image processing, and it is a key step of the image processing image analysis. the image recognition based on image segmentation, the function of which is making a distinction between the area of objects real situation,the area in different places and the area with different characteristic and forming a digital characteristic. there are thousands of methods of image segmentation, this article will introduce several mainstream method, and analyze their respective characteristics, use this two ways to make image segmentation with labview,and show the phenomenon of experiment,campare the treatment result of the two methods.[keyword] image segmentation threshold otsu bimoda labview引言 (1)1 图像分割论述 (2)1.1 图像分割的定义 (2)1.2 图像分割方法综述 (3)1.2.1 边缘检测法 (3)1.2.2 阈值分割法 (5)1.2.3 基于区域的分割 (5)2 图像阈值分割算法 (6)2.1 阈值分割算法简述 (6)2.2 全局阈值算法 (7)2.3 自适应阈值算法 (9)2.4 最小误差阈值 (10)2.5 最大类间方差算法 (10)3 图像分割实验结果及实现平台介绍 (11)3.1 labview简述 (11)3.2 labview的应用 (12)3.3 vi设计 (14)3.3.1 双峰法选取阈值 (16)3.3.2大津法选取阈值 (17)3.4实验结果比较总结 (17)结论 (20)致谢 (21)[参考文献] (22)图像技术在广义上是各种与图像有关技术的总称。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于LabVIEW的控制系统仿真毕业设计目录1 绪论 (I)1.1 课题背景 ....................................................................................................................................... - 1 -1.2 控制系统仿真的意义.................................................................................................................... - 1 -1.3 控制系统仿真的研究现状............................................................................................................ - 2 -1.4 本课题研究内容 ........................................................................................................................... - 2 -2 LabVIEW概述 .................................................................................................................. - 4 -2.1 虚拟仪器技术 ............................................................................................................................... - 4 -2.2 控制设计工具包 ........................................................................................................................... - 5 -3 系统方案的选定............................................................................................................... - 7 -3.1 系统概述 ....................................................................................................................................... - 7 -3.2 系统方案的比较与选定................................................................................................................ - 7 -3.3 系统子模块的规划........................................................................................................................ - 9 -4 系统设计......................................................................................................................... - 10 -4.1 信号发生器 ................................................................................................................................. - 10 -4.1.1 确定方案 ............................................................................................................................. - 10 -4.1.2 VI设计................................................................................................................................. - 10 -4.2 典型环节 ..................................................................................................................................... - 13 -4.2.1 建模及理论分析 ................................................................................................................. - 13 -4.2.2 VI设计................................................................................................................................. - 14 -4.3 质点-弹簧-阻尼器系统.......................................................................................................... - 18 -4.3.1 建模与模型转换及其VI设计........................................................................................... - 18 -4.3.2 模型分析及其VI设计....................................................................................................... - 21 -4.3.3 PID设计及其VI设计......................................................................................................... - 25 -4.4 一级倒立摆系统 ......................................................................................................................... - 29 -4.4.1 建模与分析及其VI设计................................................................................................... - 30 -4.4.2 LQR设计及其VI设计....................................................................................................... - 36 -4.4.3 实时仿真及其VI设计....................................................................................................... - 41 -4.5 动态调用VI的设计 ................................................................................................................... - 44 -4.5.1 VI的动态调用..................................................................................................................... - 44 -4.5.2 VI设计................................................................................................................................. - 45 -5 发布应用程序................................................................................................................. - 47 -5.1生成独立可执行应用程序........................................................................................................... - 47 -5.2生成安装程序 .............................................................................................................................. - 49 -6 总结和展望..................................................................................................................... - 52 -6.1 总结 ............................................................................................................................................. - 52 -6.2 展望 ............................................................................................................................................. - 52 - 参考文献............................................................................................................................. - 53 -附录................................................................................................................................... - 55 -致谢........................................................................................................... 错误!未定义书签。