基于自适应神经网络的柔性关节空间机器人振动抑制控制
面向机器人笛卡尔空间的轨迹运动自适应抑振控制
面向机器人笛卡尔空间的轨迹运动自适应抑振控制作者:李琳古智超张铁来源:《振动工程学报》2021年第03期摘要:工業机器人的柔性传动部件导致机器人末端产生振动,严重降低笛卡尔运动精度,为此提出自适应输入整形抑振控制策略。
以“双惯量模型+PD控制”建立关节伺服系统模型,分析振动特性。
由于运动中的振动信号存在较大噪声,无法准确辨识振动频率和阻尼比,故采用基于递推最小二乘法(Recursive Least Squares, RLS)的任意时延输入整形器自适应设计方法。
通过对笛卡尔轨迹规划的归一化插补函数输入整形,提出笛卡尔轨迹输入整形方法,实际表现为重新规划笛卡尔速度大小而不改变运动方向。
输入整形抑振实验中直线轨迹振动信号能量最大降低77.08%,圆弧轨迹振动信号能量最大降低31.07%,残余振动信号能量降低80%以上,验证了所述抑振控制策略能有效抑制机器人笛卡尔运动启停时的振动。
关键词:工业机器人; 振动抑制; 柔性关节; 自适应输入整形; 笛卡尔运动中图分类号: TP242.2; TB535 文献标志码: A 文章编号: 1004-4523(2021)03-0499-08DOI:10.16385/ki.issn.1004-4523.2021.03.007引言工业机器人的柔性传动部件(如谐波减速器、同步带等)启动和停止时导致机器人末端存在较大的振动,严重降低了运动精度[1]。
在工业生产中,要求工业机器人具备高速、高精度的运动控制特点,故需要研究抑制末端振动的控制策略。
柔性关节通常采用双惯量模型描述,振动现象属于伺服系统的机械谐振[2]。
常用的伺服振动控制方法包括陷波滤波器[3⁃4]、状态反馈法[5⁃6]、迭代学习控制[7] 、输入整形器[8⁃9]等。
输入整形器利用特定的脉冲序列与参考输入进行卷积运算得到抑振控制输入。
与陷波滤波器和低通滤波器相比,输入整形器的抑振效果更优且具有更短的滤波时间长度[10]。
基于自适应 RBF 模糊神经网络的旋转柔性铰接梁的振动控制
基于自适应 RBF 模糊神经网络的旋转柔性铰接梁的振动控制邱志成;许燕飞
【期刊名称】《振动与冲击》
【年(卷),期】2016(035)007
【摘要】由柔性关节连接中心刚体和挠性附件的刚柔耦合系统广泛应用于卫星太阳能帆板、空间机器人等领域中,在调姿或者外部扰动带来振动时,将影响系统的稳定性和指向精度,对带有铰接结构的柔性梁的影响更甚。
设计并建立了带有柔性关节(谐波齿轮)的旋转柔性铰接梁实验平台,基于压电传感器测量信号的振动频响特性分析,分别采用PD 控制和自适应 RBF 模糊神经网络控制算法,进行了基于电机驱动的位置设定点弯曲振动的主动控制研究。
实验比较结果验证设计的自适应 RBF 模糊神经网络控制算法能够快速抑制振动。
【总页数】7页(P89-95)
【作者】邱志成;许燕飞
【作者单位】华南理工大学机械与汽车工程学院,广州 510641;华南理工大学机械与汽车工程学院,广州 510641
【正文语种】中文
【中图分类】TH212;TP241
【相关文献】
1.电流变液用于旋转运动柔性梁振动控制的实验研究 [J], 魏克湘;孟光;周烁;鲁宏权
2.基于特征模型的柔性结构自适应振动控制方法 [J], 张国琪;吴宏鑫
3.行星减速器驱动旋转双柔性梁T-S模糊振动控制 [J], 邱志成;吴传健
4.旋转双柔性压电梁的分层递推模糊振动控制 [J], 邱志成;吴传健
5.旋转柔性梁的振动控制仿真及实验探讨 [J], 祝发荣;黄清华;陈德成
因版权原因,仅展示原文概要,查看原文内容请购买。
机器人关节振动抑制控制技术研究与应用

机器人关节振动抑制控制技术研究与应用随着机器人技术的不断发展,机器人的应用领域也越来越广泛。
然而,机器人在工业生产线上的应用中,常常受到振动的干扰,使得机器人的精度和效率受到影响。
因此,机器人关节振动抑制控制技术的研究与应用,成为了机器人控制领域一个重要的研究方向。
一、背景分析机器人关节振动抑制控制技术的出现,是由于机器人应用范围的扩大所带来的问题。
由于机器人在生产线上的应用领域越来越广泛,机器人需要具备更高的精度和效率。
同时,由于机器人的高速运动会产生振动,从而引入了误差,导致机器人精度下降。
因此,机器人关节振动抑制控制技术的研究与应用,成为了机器人控制领域一个重要的研究方向。
二、机器人关节振动抑制控制技术的研究机器人关节振动抑制控制技术的研究方向主要分为两类,一类是主动振动控制技术,另一类是被动振动控制技术。
(一)主动振动控制技术主动振动控制技术是指通过控制机器人臂或关节运动来减小振动幅度和频率的技术。
主动振动控制技术主要包括增益调整控制、自适应控制和预测控制等。
其中,增益调整控制是利用反馈控制理论建立振动抑制控制器,通过改变控制器的控制增益来控制机器人的振动。
其优点是简单明了,易于实现;缺点是需要对机器人模型进行准确建模,否则控制效果不佳。
自适应控制是通过自适应算法对机器人模型的特性进行识别,以此进行控制。
其优点是不需要精确的机器人模型,适用性较广;缺点是自适应过程较为复杂,处理时间较长。
预测控制是利用数学模型对机器人关节的未来运动进行预测,从而进行振动抑制控制。
其优点是可以在有限的时间内对振动进行有效的控制;缺点是建立预测模型的难度较大,建模精度对控制效果有很大影响。
(二)被动振动控制技术被动振动控制技术是指通过机械或材料的特性来吸收或隔离振动的技术。
被动振动控制技术主要包括弹性材料的应用、阻尼器的应用和主动质量调节等。
其中,弹性材料的应用是将某些材料对机器人关节的振动特性进行调整,从而实现振动控制。
考虑关节柔性的工业机器人末端残余振动抑制技术研究
2023-10-30
研究》的
目录
• 研究背景和意义 • 工业机器人末端振动抑制技术研
究现状 • 考虑关节柔性的工业机器人末端
残余振动抑制技术 • 基于实验的考虑关节柔性的工业
机器人末端残余振动抑制技术验 证
目录
• 结论与展望 • 参考文献 • 附录
在实际应用中,可以考虑将所提出的方法与其他 控制方法相结合,以实现更优的振动抑制效果。
06
参考文献
参考文献
01
02
03
04
05
董哲, 赵增辉, 王磊磊, 等. 基于阻抗控制的工 业机器人振动抑制研究. 机械工程学报, 2019, 55(18): 1-10.
王海涛, 陈蔚芳, 周向东. 基于最优控制的工业机 器人残余振动主动抑制 算法研究. 中国机械工 程, 2020, 31(13): 1785-1792.
研究不足与展望
虽然本文已经取得了一些成果,但是仍然存在一 些不足之处,例如建立的模型只考虑了关节柔性 ,没有考虑其他因素的影响,如负载变化、运动 速度等。
针对神经网络方法,可以考虑采用更先进的优化 算法和训练策略,以提高网络的训练效率和泛化 能力。
在未来的研究中,可以考虑将其他影响因素纳入 模型中,以更准确地描述工业机器人末端振动。
关节柔性是指机器人关节处因弹性形变而产生的位移、速度和加 速度,对机器人末端振动产生影响。
关节柔性对末端振动的影响
关节柔性会改变机器人末端轨迹,产生振动,影响机器人的稳定 性和精度。
影响因素分析
关节柔性受到多种因素影响,如机器人结构、材料、负载等。
考虑关节柔性的工业机器人末端残余振动抑制方法
基于神经网络的柔性机器人应用研究
基于神经网络的柔性机器人应用研究一、引言随着人工智能技术的日益成熟,柔性机器人的应用越来越广泛。
特别是在一些人力资源匮乏的领域,柔性机器人已经成为一种极具价值和潜力的机器人类型。
然而,柔性机器人的关键在于其柔韧性和适应性,这对其控制系统的要求极高。
基于神经网络的控制技术,成为柔性机器人越来越重要的控制手段。
二、什么是神经网络控制技术神经网络控制技术是一种模仿生物神经系统的学习和适应原理,构建出的数学模型。
它可以模拟人类大脑的思维机制,自我学习、适应外界环境和改进自身控制能力。
在机器人领域,神经网络控制技术最大的优点是可以使机器人具备快速自适应能力,这对柔性机器人的控制具有重要作用。
三、柔性机器人的特点柔性机器人是一种独特的机器人类型,具有以下几个特点:1. 软性设计:柔性机器人采用柔性的材质和结构,可以使其适应各种不规则形状和运动。
2. 多关节设计:柔性机器人具有多个关节,可以实现大范围的运动和控制。
3. 特殊应用领域:柔性机器人通常应用于狭小、危险、难进入的场所,如医疗、救援、航天等领域。
四、柔性机器人的神经网络控制技术1. 神经网络建模技术神经网络可以建模复杂的控制系统和非线性问题,因此被广泛应用于柔性机器人控制领域。
2. 神经网络学习与训练技术神经网络可以通过学习和训练,提高其控制能力和适应性。
对柔性机器人来说,这种能力尤为重要。
3. 神经网络控制优化技术神经网络可以通过控制优化技术,优化其控制策略和动作规划,从而使机器人的控制更加智能化和高效化。
五、柔性机器人神经网络控制技术的应用实例1. 医疗领域应用柔性机器人可应用于内窥镜和手术机器人等医疗领域。
在这些领域中,柔性机器人需要具备精准控制、高度适应和实时响应能力,神经网络控制技术可以实现这些要求。
2. 救援领域应用灾难救援和海底探测等领域,柔性机器人需要具备柔韧性、适应性和灵活性,能够适应复杂环境和任务需求。
神经网络技术可以实现机器人的快速自适应和实时响应。
柔性关节机器人的自适应稳态控制算法
柔性关节机器人的自适应稳态控制算法TIAN Xiaoling【摘要】针对常规滑膜控制算法进行柔性关节机器人控制的稳态误差较大的问题,为了提高机器人姿态稳定性,提出一种基于多模式弹性驱动的柔性关节机器人的自适应稳态控制算法.构建柔性关节机器人末端位姿参数分布模型,分析柔性关节机器人位姿调节的约束参量,将柔性关节机器人位姿调节的稳态控制问题转化为机器人位姿参量自适应调节问题,有效实现柔性关节机器人的姿态变换的特征分解和误差补偿修正.结合运动规划模型实现机器人的多模式弹性驱动,完成柔性关节机器人位姿调节稳态控制.仿真结果表明,采用该方法进行柔性关节机器人位姿控制的稳定性较好,自适应控制性能优越.【期刊名称】《智能计算机与应用》【年(卷),期】2019(009)002【总页数】4页(P119-122)【关键词】柔性关节机器人;自适应;控制;姿态调节【作者】TIAN Xiaoling【作者单位】【正文语种】中文【中图分类】TP2710 引言柔性关节机器能模仿人类和动物的关节进行自主运动,并在机械臂设计、下肢助力外骨骼以及智能仿生腿设计等领域都具有很好的应用价值。
柔性关节机器人在运动中会受到参数摄动、外界干扰及未建模动态等不确定性因素的影响,导致机器人的控制系统引入柔性元件构成执行部件时将产生稳态误差,机器人的姿态调节性能不好,需要进行柔性关节机器人的自适应稳态控制,提高柔性关节机器人的输出稳定性[1]。
传统方法中,对柔性关节机器人的自适应稳态控制方法通常建立在模糊PID控制器的基础上,结合滑模控制方法进行机器人的位姿参数调节和自适应控制[2],取得了一定的控制效能。
其中,文献[3]中提出一种基于时滞反馈的柔性关节机器人仿生步态鲁棒性控制方法,采用传感器基阵进行柔性关节机器人的步态相关性参数采集和稳态跟踪融合处理,提高机器人的自适应位姿参量调节能力,但该方法的控制时滞较大,自适应规划性能不好。
文献[4]中提出采用时滞反馈补偿方法进行柔性关节机器人的控制误差修正,提高柔性关节机器人的稳态控制性能,降低稳态误差,提高柔性关节机器人控制的稳健性,但该方法的计算开销较大,实时性不好。
自适应神经网络控制技术在机器人中的应用研究
自适应神经网络控制技术在机器人中的应用研究一、引言近年来,随着科技的不断发展,机器人技术已经得到了广泛的应用。
机器人不仅可以帮助人类完成重复性的工作任务,还可以在缺乏人力和有危险的环境中承担工作。
因此,机器人控制技术的研究已成为一个重要的领域。
目前,机器人控制技术主要包括传统控制方法和神经网络控制方法。
在传统控制方法中,通常需要建立数学模型,在控制系统中进行控制。
然而,由于机器人的复杂性和变化性,这种方法并不总是能够实现良好的控制效果。
相比之下,神经网络控制技术具有更好的适应性和鲁棒性,能够针对机器人的不同状态进行自适应调节,控制效果更为优秀。
因此,本文将重点介绍自适应神经网络控制技术在机器人中的应用研究。
二、机器人神经网络控制方法介绍机器人神经网络控制方法是一种利用神经网络对机器人进行非线性建模,并进行控制的方法。
与传统控制方法不同,神经网络控制技术不需要对机器人的数学模型进行建立,而是通过多层神经元网络来模拟机器人的动态响应和运动规律。
这种技术具有自适应性和鲁棒性,并且能够进行在线学习和训练,根据机器人动态变化的状态进行实时调整和控制。
机器人神经网络控制方法主要包括以下几个步骤:1.建立神经网络模型。
该步骤需要确定神经网络的结构和参数,以便对机器人动态响应进行精确建模。
2.收集训练数据。
在实验中,需要对机器人进行多组实验并收集数据,以建立神经网络模型。
3.训练神经网络。
通过训练神经网络,可以得到一组最佳的参数,以模拟机器人的动态响应和运动规律。
4.在线控制机器人。
在实验中,收集机器人的实时状态,并通过神经网络进行控制调节,使机器人能够完成动作任务。
机器人神经网络控制方法的主要优点是,能够对机器人进行精确的建模和预测,并在实时调节机器人运动规律和行为时,具有很高的适应性和鲁棒性。
同时,他们也能够避免传统控制方法所面临的问题:模型不准确并不适用于机器人。
三、机器人神经网络控制技术在机器人中的应用机器人神经网络控制技术在机器人中的应用非常广泛,如自主导航,运动规划和行为控制等领域。
柔性关节机械臂振动抑制控制策略的研究
硕士学位论文柔性关节机械臂振动抑制控制策略的研究(学术型)RESEARCH ON THE CONTROL STRATEGY OF VIBRATION SUPPRESION FOR THEFLEXIBLE-JOINT MANIPULATOR(Academic)任义哈尔滨工业大学2013年7月国内图书分类号:TP241.3 学校代码:10213 国际图书分类号:621 密级:公开工学硕士学位论文柔性关节机械臂振动抑制控制策略的研究(学术型)硕士研究生:任义导师:金明河教授申请学位:工学硕士学科:机械电子工程所在单位:机电工程学院答辩日期:2013年7月授予学位单位:哈尔滨工业大学Classified Index: TP241.3U.D.C: 621Dissertation for the Master Degree in EngineeringRESEARCH ON THE CONTROL STRATEGY OF VIBRATION SUPPRESION FOR THEFLEXIBLE-JOINT MANIPULATOR(Academic)Candidate:Ren YiSupervisor:Prof.Jin MingheAcademic Degree Applied for:Master of Engineering Speciality:Mechatronics Engineering Affiliation:School of Mechatronics Engineering Date of Defence:July, 2013Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论摘要谐波减速器和力矩传感器等柔性元件因其独特性能而广泛应用在机器人关节系统中,以获取高减速比,对关节力矩的检测和实现关节的模块化。
柔性关节机器人的模糊反步自适应位置控制
柔性关节机器人的模糊反步自适应位置控制【摘要】该文章研究柔性关节机器人的模糊反步自适应位置控制。
在介绍了研究背景和研究意义。
正文部分分别讨论了模糊控制、反步控制和自适应控制在柔性关节机器人中的应用,以及模糊反步自适应位置控制的原理。
实验结果与分析展示了该控制方法的有效性。
在总结了柔性关节机器人的模糊反步自适应位置控制的有效性,提出了未来研究方向。
本研究为柔性关节机器人的控制提供了新思路,对提高机器人的精度和稳定性具有重要意义。
【关键词】关键词:柔性关节机器人、模糊控制、反步控制、自适应控制、位置控制、原理、实验结果、有效性、未来研究方向、总结。
1. 引言1.1 研究背景柔性关节机器人是一种具有柔软关节结构的机器人系统,其具有较强的柔性和变形能力,可以更好地适应复杂环境下的工作任务。
与传统刚性关节机器人相比,柔性关节机器人在某些应用领域具有更好的性能和灵活性。
由于其柔性关节的特性,柔性关节机器人在运动控制方面面临着诸多挑战。
传统的位置控制方法在柔性关节机器人上往往难以实现良好的控制效果,因为柔性关节的柔顺性和变形性会对控制系统的稳定性和精度造成影响。
研究人员提出了一种新的控制方法——模糊反步自适应位置控制,以提高柔性关节机器人的运动控制性能。
该控制方法结合了模糊控制、反步控制和自适应控制的优点,能够有效克服柔性关节机器人系统的非线性和不确定性,实现更精确、稳定的位置控制。
柔性关节机器人的模糊反步自适应位置控制成为当前研究的热点之一。
1.2 研究意义柔性关节机器人是一种具有柔软特性的机器人系统,具有较高的鲁棒性和适应性,广泛应用于生产制造、医疗护理、空间探测等领域。
由于其柔性特性和非线性特性,传统的位置控制方法往往无法满足其高精度控制需求。
研究柔性关节机器人的模糊反步自适应位置控制具有重要的意义。
柔性关节机器人的模糊反步自适应位置控制可以提高其控制精度和稳定性,进而提升其在各个领域的应用效果。
该控制方法可以有效克服柔性关节机器人在运动过程中的动态特性变化和外部干扰,提高其对复杂环境的适应能力。
柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制

柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制梁捷;陈力;梁频【期刊名称】《振动与冲击》【年(卷),期】2016(035)018【摘要】空间机器人系统的柔性主要体现在空间机器人的臂杆和连接各臂杆之间的铰关节;由于空间机器人系统结构的复杂性,以往研究人员对同时具有柔性关节和柔性臂的系统关注不够;为此讨论了参数不确定情况下柔性关节、柔性臂空间机器人系统的动力学模拟、运动控制方案设计和以及臂、关节双重柔性振动的分阶主动抑制问题。
依据线动量、角动量守恒关系并基于拉格朗日方程、线性扭转弹簧及假设模态法推导了系统动力学模型;以此为基础;针对空间机器人实际应用中各关节铰具有较强柔性的情况,引入了关节柔性补偿控制器并结合奇异摄动技术将整个系统分解成独立时间尺度的电机力矩动力子系统和柔性臂子系统;针对电机力矩动力子系统,设计了力矩微分反馈控制器来抑制关节柔性引起的系统弹性振动;针对柔性臂子系统,提出了一种基于虚拟力概念的自适应模糊全局滑模控制方案,由于运用了虚拟力的概念,从而通过仅设计一个控制输入就可达到既跟踪期望轨迹又抑制柔性臂柔性振动的控制目标。
计算机数值仿真对比实验证实了该方法的可靠性和有效性。
【总页数】9页(P62-70)【作者】梁捷;陈力;梁频【作者单位】福州大学机械工程及自动化学院,福州 350108; 中国空气动力研究与发展中心,四川绵阳 621000; 电子科技大学航空航天学院,成都 611731;福州大学机械工程及自动化学院,福州 350108;中国空气动力研究与发展中心,四川绵阳 621000【正文语种】中文【中图分类】TP241【相关文献】1.关节柔性的漂浮基空间机器人基于奇异摄动法的轨迹跟踪非奇异模糊Terminal 滑模控制及柔性振动抑制 [J], 梁捷;陈力2.柔性关节空间机器人基于柔性补偿的模糊鲁棒滑模控制及柔性振动主动抑制 [J], 谢立敏;陈力3.带有柔性补偿的柔性关节空间机器人的增广自适应控制及关节振动抑制 [J], 陈志勇;陈力4.漂浮基柔性关节-柔性臂空间机器人运动非线性滑模控制及双重弹性振动主动抑制 [J], 谢立敏;陈力5.漂浮基柔性关节、柔性臂空间机器人动力学建模、饱和鲁棒模糊滑模控制及双重柔性振动主动抑制 [J], 谢立敏;陈力因版权原因,仅展示原文概要,查看原文内容请购买。
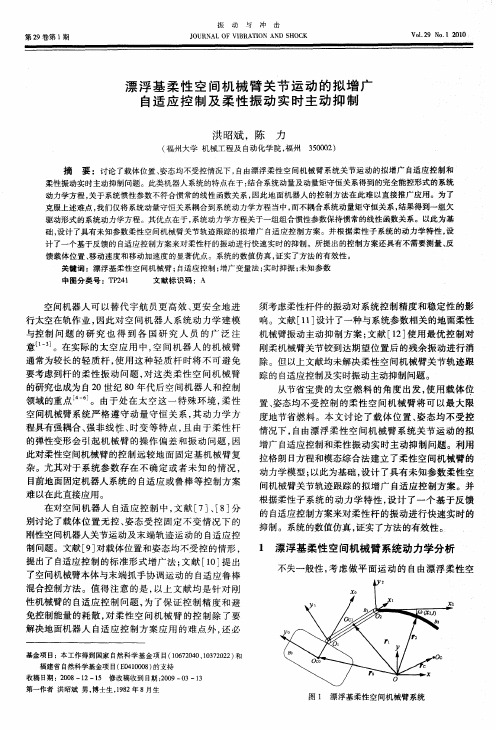
漂浮基柔性空间机械臂关节运动的拟增广自适应控制及柔性振动实时主动抑制
馈载体位置 、 移动速度和移动加速度的显 著优点 。系统 的数值仿真 , 了方法的有效性。 证实
关 键 词 :漂 浮基 柔 性 空 间机 械 臂 ; 自适 应 控 制 ; 广变 量 法 ; 时抑 振 ; 知参 数 增 实 未
中图 分 类 号 :T 2 1 P 4 文 献 标 识 码 :A
空间机 器 人 可 以替 代 宇 航 员更 高效 、 安 全地 进 更 行 太空在 轨作 业 , 因此 对 空 间机 器 人 系统 动 力 学 建 模 与控制 问题 的研 究 也 得 到 各 国 研 究 人 员 的 广 泛 注 意【 j l 。在实 际 的太 空 应 用 中 , 间 机器 人 的 机 械 臂 空
振
动
与
冲
击
第2 9卷第 1 期
J OURNAL OF VI BRAT ON AND S I HOCK
漂 浮基 柔 性 空间机械 臂 关节 运 动 的拟增 广 自适 应 控 制 及 柔 性 振 动 实 时 主 动 抑 制
洪 昭斌 ,陈 力
30 0 ) 50 2
( 州 大 学 机械 工程 及 自动 化 学 院 , 州 福 福
摘 要 :讨论了载体位置、 姿态均不受控情况下, 自由漂浮柔性空间机械臂系统关节运动的拟增广自适应控制和
柔性振动实时主动抑制 问题 。此类机器人系统的特点在 于 : 结合系统动量及 动量矩守恒关系得到的完全能控 形式 的系统
姿态受控柔性关节双臂空间机器人的抗力矩饱和控制与振动抑制_陈志勇

ANTI-TORQUE-WINDUP CONTROL AND VIBRATION SUPPRESSION OF FLEXIBLE-JOINT DUAL-ARM SPACE ROBOT WITH AN ATTITUDE-CONTROLLED BASE
CHEN Zhi-yong , CHEN Li
(School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350116, China)
T D21 R14 和 D22 R 44 均为矩阵 D(q ) 的子矩阵,
若令 趋向于零,则由式(6)可知系统等效刚度 速 值将趋于无穷大, 即此时系统电机转角位置 θm 、 、加速度 θ 将分别与连杆转角位置 θ 、速度 度θ
m m
、加速度 θ 同步。于是,式(8)可简化为: θ u τ s ( I K p ) 1 J m θ
第 33 卷第 5 期 2016 年 5 月
Vol.33 No.5 May 2016
工
程
力
学 227
ENGINEERING MECHANICS
文章编号:1000-4750(2016)05-0227-07
姿态受控柔性关节双臂空间机器人的 抗力矩饱和控制与振动抑制
陈志勇,陈 力
(福州大学机械工程及自动化学院,福州 350116)
2 x1
P1
B12
B1
2m
1 x1
x
2 2
2
y
B2
o12
x
P2
B22
B11
在漂浮基柔性关节空间机械臂动力学分析的基础 上,给出了一种神经网络自适应反演控制新方法。 虽然上述研究均实现了柔性关节空间机器人的既定 控制目标,但其控制方法的设计均要求系统各驱动 装置具有无限力矩输出的能力。事实上,空间机器 人配置的任何执行器(包括载体姿态控制系统、机械 臂关节驱动电机等)均会因各种物理原因而达到力矩 输出饱和状态[11];而这种力矩饱和现象一旦出现, 将会直接影响上述控制方法的实际控制效果及控制 稳定性。因此,继续研究柔性关节空间机器人的抗 力矩饱和控制问题将具有十分重要的现实意义。 目前有关柔性关节空间机器人的抗力矩饱和 控制研究还尚不多见,仅有的一些文献也只停留在 单臂问题上的研究[12]。考虑到未来机器人系统的多 臂化趋势,双臂空间机器人将会得到越来越广泛的 应用。因此,本文将以载体姿态受控的漂浮基柔性 关节双臂空间机器人为主要研究对象,着重解决其 姿态与关节协调定位、关节振动抑制及抗力矩饱和 控制问题。 结合系统动量守恒定律、 拉格朗日方程、 柔性补偿及奇异摄动技术,给出柔性关节双臂空间 机器人包含快、慢变子系统的奇异摄动模型;以此 为基础,提出由快变子系统力矩微分状态反馈控制
柔体动力学模型的机器人关节振动分析与抑制

柔体动力学模型的机器人关节振动分析与抑制张铁;覃彬彬;刘晓刚【摘要】To solve the problems of mechanical resonance caused by flexible transmission in industrial robot system,a vibration suppression method of robot joints based on flexible dynamics model is studied to reduce the vibration of arm in motion.Firstly,the flexible dynamics model of robot joints is established to analyze the causes of vibration by mathematical expressions,for obtaining the modal information of joints by using ABAQUS(a software).Thus,the measurement point arrangement of the force hammer excitation experiment can be achieved based on the characteristics of the modal information.In order to suppress the vibration of robot joint,the modal information of the joint shaft is obtained by experiment,and then the notch filter is designed by analyzing the influence of resonance frequency on the robot control.The simulation and control experiment of the robot are carried out in the 5th joint.The experimental results on the value of the end residual amplitude indicate that the acceleration of amplitude decreases from 3to 0.5m/ s2,the absolute value of the motor rotor offset decreases from 1to 0.5°,embodying the good suppression characteristics of the notch filter.%为解决工业机器人传动系统中的柔性传动环节常常导致的机械谐振问题,减小手臂在运动中出现振动,研究了基于柔体动力学模型的机器人关节振动抑制的方法.该方法先通过对机器人关节建立柔体动力学模型,从数学表达式中分析其产生振动的原因,利用ABAQUS有限元软件获得关节的振型信息,并基于ABAQUS的振型特点获得力锤激励实验法的测点布置,通过实验获得关节轴的模态信息,并进一步分析共振频率对机器人的控制影响以设计合适的陷波滤波器,从而实现对机器人关节振动的抑制.该方法在机器人第5关节中进行了仿真和控制实验,末端余振幅值的实验说明振幅加速度值从3降至0.5m/s2,停止后电机转子偏移量绝对值从1降至0.5°,体现了陷波滤波器良好的抑制特性.【期刊名称】《振动、测试与诊断》【年(卷),期】2019(039)002【总页数】8页(P242-248,438)【关键词】柔体动力学;有限元;力锤激励法;陷波滤波器;振动抑制【作者】张铁;覃彬彬;刘晓刚【作者单位】华南理工大学机械与汽车工程学院, 广州, 510641;华南理工大学机械与汽车工程学院, 广州, 510641;桂林航天工业学院广西高校机器人与焊接重点实验室, 桂林, 541004【正文语种】中文【中图分类】TP242.2;TH113.1引言垂直六自由度工业机器人的关节采用RV减速器及具有柔性较大的同步传动带系统驱动关节运动时,关节和连杆的柔性效应的增加,使得结构发生变形与共振,导致任务的期望精度降低。
柔性机器人躲避振动的一种方法
柔性机器人躲避振动的一种方法
高志慧;贠超;边宇枢
【期刊名称】《机械科学与技术》
【年(卷),期】2004(023)005
【摘要】对于柔性机器人而言,系统柔性所引起的振动使得机器人很难准确地跟踪预定的末端轨迹,因此如何有效地减小柔性机器人的振动是一个非常重要的研究课题.本文时柔性机器人躲避振动的方法进行了研究.首先分析了影响柔性机器人末端振动变形的因素,在此基础上得出了在结构参数和末端运动轨迹不变的情况下,通过适当调整关节运动参数可以使柔性机器人有效躲避振动的结论;然后研究了机器人末端运动参数与关节运动参数之间的关系,提出了通过规划机器人末端运动参数从而调整关节运动参数,以使机器人能够有效躲避和减小柔性振动的方法,并且给出了相应的算法;最后通过数值仿真验证了该方法的有效性.
【总页数】4页(P567-569,624)
【作者】高志慧;贠超;边宇枢
【作者单位】北京航空航天大学,机械工程及自动化学院,北京,100083;北京航空航天大学,机械工程及自动化学院,北京,100083;北京航空航天大学,机械工程及自动化学院,北京,100083
【正文语种】中文
【中图分类】TP242.2
【相关文献】
1.磁流变液振动控制阻尼器在柔性机器人中的运用 [J], 崔广宇;冯岩;邹俊俊
2.一种柔性机器人的神经网络控制方法 [J], 吴立成;陆震;于守谦;郑红
3.柔性机器人动力学建模的一种方法 [J], 边宇枢;陆震
4.多关节柔性机器人手臂的振动分析和振动控制 [J], 孙健利
5.一种柔性机器人系统建模方法(英文) [J], 郭巧;吴越;陆际联
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于自适应神经网络的柔性关节空间机器人振动抑制控制沈金淼;游张平;张文辉;叶晓平;周书华;单以才
【期刊名称】《上海航天(中英文)》
【年(卷),期】2022(39)6
【摘要】针对存在负载变化、建模误差和摩擦干扰的柔性关节空间机器人控制问题,提出了基于奇异摄动的神经网络自适应鲁棒控制方法。
首先,通过拉格朗日方程和动量矩守恒定理建立柔性关节漂浮基空间机器人动力学模型;其次,通过奇异摄动理论将动力学模型近似分解表征为刚性的慢变子系统和柔性的快变子系统,针对于慢变子系统,设计基于神经网络补偿的自适应鲁棒控制器;针对于快变子系统,设计柔性补偿器和力矩微分反馈抑制器;最后,基于李雅普诺夫理论证明了控制系统的稳定性。
仿真表明:所提出的控制策略是有效的,且在柔性补偿器失效的情况下,采用独立的神经网络自适应鲁棒控制器能够抑制弹性振动,并精确跟踪期望轨迹。
【总页数】9页(P29-36)
【作者】沈金淼;游张平;张文辉;叶晓平;周书华;单以才
【作者单位】浙江理工大学机械与自动控制学院;南京晓庄学院电子工程学院;丽水学院工学院;浙江省文创产品数字化设计与智能制造重点实验室;浙江经济职业技术学院汽车工程学院;浙江省航空航天金属导管塑性成形技术与装备重点实验室【正文语种】中文
【中图分类】TP242
【相关文献】
1.柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制
2.柔性关节空间机器人基于柔性补偿的模糊鲁棒滑模控制及柔性振动主动抑制
3.带有柔性补偿的柔性关节空间机器人的增广自适应控制及关节振动抑制
4.柔性关节-柔性臂空间机器人的神经网络自适应反演控制及双重柔性振动抑制
5.力矩受限的柔性空间机器人模糊神经网络自适应跟踪控制及振动抑制
因版权原因,仅展示原文概要,查看原文内容请购买。