柔性关节设计
康复机器人PVDF柔性关节设计与驱动特性研究

康复机器人PVDF柔性关节设计与驱动特性研究
谢光辉;孙红;孙凡惟;王光建
【期刊名称】《机械传动》
【年(卷),期】2024(48)5
【摘要】针对康复机器人本体柔顺性差的问题,提出了一种新型的聚偏氟乙烯(Polyvinylidene Fluoride,PVDF)凝胶基人工肌肉,将其作为康复机器人柔性关节致动器,期望实现类人动作。
介绍了PVDF凝胶制备和电致变形机制,并由此设计了具备收缩和伸张功能的单体肌肉,进而将多个单体肌肉上下串联,组合构成层级人工肌肉;基于康复机器人柔性关节3层级人工肌肉,辨识其驱动数学模型,并进行了仿真与实验。
结果表明,该人工肌肉能够有效地实现位置控制,具备电致收缩和扩张能力,作为致动器应用于柔性关节是可行的。
【总页数】5页(P164-168)
【作者】谢光辉;孙红;孙凡惟;王光建
【作者单位】重庆大学机械传动国家重点实验室;重庆电子工程职业学院智慧健康学院;新西兰奥克兰大学
【正文语种】中文
【中图分类】TP2
【相关文献】
1.下肢外骨骼机器人踝关节混合柔性驱动设计与研究
2.外骨骼型下肢康复机器人柔性关节驱动器的设计及实验研究
3.基于柔性关节的下肢康复机器人设计与分析
4.
轻量化自适应柔性踝关节康复机器人设计与评估5.柔性踝关节康复机器人设计与控制
因版权原因,仅展示原文概要,查看原文内容请购买。
柔性机器人的关节设计与制作
s i g n e d a s d e s i g n r e q u i r e me n t s f o r d e t e r mi n i n g g e o me t r i c p a r a me t e r s o f j o i n t s .T h e j o i n t s ma d e o f 6 5 Mn s p r i n g s t e e l a r e a s s e mb l e d
D e s i g n a n d ma n u f a c t u r e o f l f e x re u r o b o t j o i n t s
Yu Yu e q i n g ,Ma L a n,Cu i Z h o n g we i ,I m Qi a n g
第 8卷
第 8期
中 国 科 技 论ቤተ መጻሕፍቲ ባይዱ文
CH I NA S CI E NCEP AP ER
Vo 1 . 8 No . 8 Au g .2 0 1 3
2 0 1 3年 8月
柔 性 机 器 人 的 关 节 设 计 与 制 作
佘跃庆 , 马 兰 , 崔 忠 炜 ,吕 强
( 北 京 工 业 大学 机 电 学院 , 北京 1 0 0 1 2 4 )
摘 要: 本 文设计 了一种 应用 于并联机器人上 的新型开槽 式薄壁柔 性关节。 以并联 机器人运 动过 程 中关 节所需 的最大扭 转 刚 度 以及运动产 生的关节最大扭转角度作为设计条件 , 对关节结构进行设计计算 , 确定 关节几何 尺寸。然后根据设 计尺寸及使 用 条件 , 选择弹性较大并且便 于加 工的弹簧钢 6 5 Mn为材 料进行加 工制作 , 并将实 物安装在并联机器 人上。该关 节利用扭 转变形 作 为 主 要 变形 方 式 , 具 有 扭 转 角度 大和 轴 线 相对 固定 不 易 漂移 的优 点 。 关键词 : 机器人 ; 柔性结构 ; 关节; 设计 ; 制造 中图分类号 : THl l 2 ; T P 2 4 2 文献标志码 : A 文章编号 : 2 0 9 5 —2 7 8 3 ( 2 0 1 3 ) 0 8 —0 7 8 4~ 0 3
面向软体节肢机器人的柔性关节驱动器设计及特性分析

精品文档供您编辑修改使用专业品质权威编制人:______________审核人:______________审批人:______________编制单位:____________编制时间:____________序言下载提示:该文档是本团队精心编制而成,希望大家下载或复制使用后,能够解决实际问题。
文档全文可编辑,以便您下载后可定制修改,请根据实际需要进行调整和使用,谢谢!同时,本团队为大家提供各种类型的经典资料,如办公资料、职场资料、生活资料、学习资料、课堂资料、阅读资料、知识资料、党建资料、教育资料、其他资料等等,想学习、参考、使用不同格式和写法的资料,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!And, this store provides various types of classic materials for everyone, such as office materials, workplace materials, lifestylematerials, learning materials, classroom materials, reading materials, knowledge materials, party building materials, educational materials, other materials, etc. If you want to learn about different data formats and writing methods, please pay attention!面对软体节肢机器人的柔性关节驱动器设计及特性分析摘要:本文旨在开发一种适用于软体节肢机器人的柔性关节驱动器,以实现更好的控制和运动灵活性。
北京理工大学科技成果——一体化柔性关节及仿人柔性机械臂

北京理工大学科技成果——一体化柔性关节及仿人柔性机械臂成果简介本项目研制的柔性一体化关节采用机电一体的模块化设计,具有高力矩稳定输出(输出力矩70Nm),高集成化(机构、驱动电路和通信模块集成于关节之中)、互换性好(肩、肘关节可直接替换)、可靠性高等特点,适合于大规模生产,可以降低机械臂成本,具有极大的市场推广价值。
关节内部含有弹性环节,存在内在柔性,当与环境或人接触时,可以保证人不受伤害以及机械臂自身的安全性。
同时,可以测量关节的输出力矩,获得比传统关节更好的力控制精度与稳定性。
本项目在柔性一体化关节的基础上研制了仿人柔性机械臂,该机械臂采用仿人类手臂的构型的结构设计,具有4个自由度(肩部3个,肘部1个),其长度与人类手臂长度相仿。
通过阻抗控制技术可以使机械臂模拟出人类手臂可“柔”可“刚”的肌肉特性,从而使机械臂可以在非结构化环境中,安全地与环境和人类进行交互。
该机械臂适于作为与人类接触使用的专用设备或者应用于服务型机器人和空间机器人领域。
目前,项目组已将该机械臂应用于按摩治疗领域,并搭建出腰痛中医点按机器人平台。
腰痛中医点按机器人可以逼真地模拟出医师完成点按揉、指揉、弹拨和推法4种按摩手法,假体实验和临床实验结果表明机器人与医师的按摩治疗效果相仿。
项目来源国家自然基金技术领域信息技术应用范围服务型机器人现状特点国内领先、国际先进柔性一体化关节技术创新研制了具有内在柔性和力矩测量的一体化关节,可以通过该关节快速地搭建出仿人机械臂,使机械臂在完成作业的同时可以在非结构化环境中安全地与人类和环境进行交互,为机器人与人类和谐相处提供了新的解决方案。
仿人柔性机械臂所在阶段原理样机成果知识产权申请发明专利4项成果转让方式合作开发/技术转让基于仿人柔性臂的按摩机器人平台市场状况服务型机器人以及可使用在非结构化环境中的机器人是现在机器人研究的热点,也是社会关注的焦点。
传统的刚性工业机器人构建传感器壁垒,采用柔顺控制算法实现对环境的柔顺性。
主动柔顺膝关节助力机构设计
主动柔顺膝关节助力机构设计摘要:为提高助力外骨骼的可穿戴性和柔顺性能,基于双椭圆模型提出了一种主动柔顺的膝关节助力机构,采用平面四连杆机构结合串联作动器的设计方法进行结构设计。
与传统单铰链的刚性机构相比,该机构更匹配人体膝关节运动,克服了传统刚性结构容易导致人体运动受限,出现过强的约束力,舒适性不足,人机交互力波动明显的缺点。
人机耦合计算结果表明机构与人体的能满足运动学匹配,人机交互波动小,具备较好的可穿戴性能。
关键词:膝关节;下肢外骨骼;主动;柔顺;机構设计1、引言膝关节在日常活动中一直受到高强度的载荷,容易疲劳老化,受到损伤。
为了增强人体机能,提高人体的耐疲劳度,本文开展外骨骼膝关节助力机构设计。
目前,膝关节助力以刚性结构为主,对于穿戴式助力这种“人在环”的特殊系统,刚性结构容易导致人体运动受限,出现过强的约束力,导致舒适性变差,人机交互力波动明显;而主动柔顺助力系统穿戴的主观感受好,对人体的运动范围影响很小,系统更具灵活性,在边防巡逻、城市作战等军事领域和助老助残领域具有很大的应用价值。
本文由膝关节运动机理出发,基于双椭圆模型,提出了柔顺化的膝关节助力机构,采用平面串联四连杆的方案的进行膝关节助力机构的设计,并进行人机耦合计算与分析。
结果显示机构与人体运动更贴合,人机交互力波动较小,具备较好的可穿戴性能。
2、人体膝关节模型建立人体膝关节运动模型是机构设计的重要依据。
真实人体膝关节十分复杂,由小腿胫骨、大腿胫骨、韧带、肌肉等组成,胫骨之间的接触面并不规则,所以在膝关节屈伸时接触面之间并不是纯滚动,而是滚动中还夹杂着滑动。
单铰链约束会导致膝关节实际运动轨迹不够贴合,会影响穿戴者的舒适度,还可能引起一定的运动干涉,甚至损伤人体。
因此,为获取更符合人体膝关节实际运动的模型,对膝关节运动模型的研究很有必要。
近年来许多学者在研究利用简化模型来描述膝关节在矢状面的运动,应用比较广泛的3个模型,有双圆心模型,双椭圆模型,速度瞬心模型[1]。
外摆线轮廓柔性关节的设计与分析
如图 2 示。 所
3 柔性铰链柔度计算
一
般采用欧拉梁的弯曲变形公式近似计算单轴柔性铰链的变
将铰链的变形看作是 由许多微小弯曲变形 累积的结果 , 把每个 子机械 系统 ( M ) ME S 等领域 , 譬如微动工作 台 、 光学 自动聚焦等 形 : 微小段看作长度为 的矩形截面梁 ,并且作用在每个微,巨两侧 J殳 \ 工程领域 , 陀螺仪 、 加速度计 、 精密天平以及导弹控制喷嘴形 波导 管天线等仪器仪表 , 并获得了前所未有 的高精度和稳定性 。
【 摘
要 】 于材料力 学中的变截 面梁的弯曲理论 , 夕摆线 的参数方程 的作为积分变量 , 地 基 通过 卜 直观.得
到了 外摆线轮廓柔性关节的柔度的计算公式, 再通过定义中间参数, 推导出了 较为简洁的解析计算公式, 从而 避免 了费时的数值积分。最后 , 分别分析 了切 口几何形状、 尺寸以及 最小厚度与铰链的柔度之间的关系。 关键词 : 柔性铰链 .卜 线 ; 夕摆 变截面 梁 ; 柔度 ; 变形公 式 【 bt c】 a do edn er o r b R Ssco e em t i ehn st A s at B s nbn i t o v i l C S-etnba i t a r l cai , e r e g h y f aa e O i m nh ea m c h
n me ii b t e h o u rc i tg to . n y,h ea o s p e we n t e c mpla e n d g o ty, i n in ,a d t e l r l t inc a e me r d me s o s n h
MRB-PAM 康复柔性关节设计与分析
价值工程0引言随着时代的进步和科学技术的不断进步,人们的身体健康问题越来越受到重视,尤其是在人体瘫痪的辅助治疗上。
在后期自主康复的过程中,为了降低医疗患者家庭的生活费用,进而减轻治疗带来的心理压力,减少大量公共医疗资源的消耗,辅助人体的康复机器人应运而生。
康复机器人是工业机器人和医用机器人的结合[1]。
因此,目前康复机器人的驱动手段主要以电机等,控制机器人带动人体做运动。
但当机器人应用于人体时,电机驱动人体,使得施加力和刚强度过大,对患者身体造成二次损伤。
这样就产生了柔软的关节,广泛应用于医疗、制造、救援等领域。
例如外骨骼机器人、柔性机械臂和足式机器人等机器人[2,3]。
近几年国内越来越多的院校和科研机构对康复设备(柔性关节机器人)进行了研究,并取得了一系列的研究成果。
国内外众多学者基于气动肌肉群拮抗驱动装置设计了一种3自由度球关节结构机器人[4,5];设计了一种捆扎交错式气动人工肌肉执行器[6],以此来提高工作效率;在“cheetah ”机器人系统中[7],使用拮抗式气动人工肌肉关节结构。
也将拮抗式或单/多根气动人工肌肉与改进的多种机构进行结合,设计出了许多新型的柔性关节,包括采用滑轮结构将弹性元件与驱动元件分开布置的气动人工肌肉驱动串联弹性关节[8]、通过利用一组平行的气动人工肌肉束拉动滑板-连杆机构产生旋转运动的PAM-actuated 重载机械臂[9]、两根气动人工肌肉和两根弹簧并联的四杆关节机构[10,11]等等。
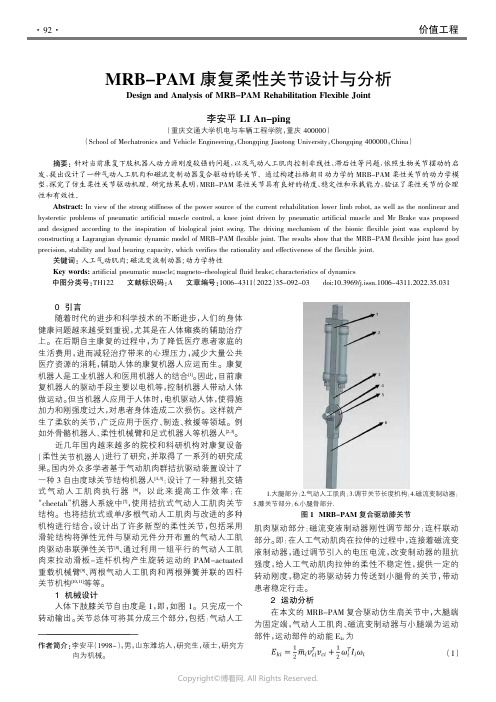
1机械设计人体下肢膝关节自由度是1,即,如图1。
只完成一个转动输出。
关节总体可将其分成三个部分,包括:气动人工肌肉驱动部分;磁流变液制动器刚性调节部分;连杆联动部分。
即:在人工气动肌肉在拉伸的过程中,连接着磁流变液制动器,通过调节引入的电压电流,改变制动器的阻抗强度,给人工气动肌肉拉伸的柔性不稳定性,提供一定的转动刚度,稳定的将驱动转力传送到小腿骨的关节,带动患者稳定行走。
2运动分析在本文的MRB-PAM 复合驱动仿生肩关节中,大腿端为固定端,气动人工肌肉、磁流变制动器与小腿端为运动部件,运动部件的动能E ki 为(1)———————————————————————作者简介:李安平(1998-),男,山东潍坊人,研究生,硕士,研究方向为机械。
柔性机器人的机构设计和控制研究
柔性机器人的机构设计和控制研究柔性机器人是指具有柔性结构和柔性传动机构的机械臂,它具有较高的柔性、轻巧和可变形的特点,能够在不同环境中执行精确灵活的任务。
柔性机器人的机构设计和控制是该领域的重要研究方向,本文将探讨柔性机器人的机构设计和控制方面的研究进展。
柔性机器人的机构设计是柔性机器人研究领域的关键问题之一、机构设计的目标是实现柔性臂的精确运动和优化力传递。
柔性机器人的机构设计方法主要包括柔性关节机构设计和柔性链条设计。
柔性关节机构设计是指设计柔性关节以实现机械臂的自由度和运动范围。
柔性关节可以采用弯曲或扭转等柔性材料,如弯曲杆、扭转杆或软体材料。
柔性关节的设计需要考虑材料的柔性和强度,以及与其他关节的协同运动。
柔性链条设计是指设计柔性的连接杆件以实现机械臂的连续曲线运动。
柔性链条可以采用连杆组件和柔性衔接件,通过特定的结构设计实现连杆的柔性运动。
机构设计的关键问题是如何设计合适的结构和材料,以实现柔性臂的精确运动和优化力传递。
柔性机器人的控制是柔性机器人研究领域的另一个重要问题。
由于柔性机器人具有较高的柔性和可变性,其控制方法不同于传统刚性机器人的控制方法。
柔性机器人的控制有两个主要方面:运动控制和力控制。
运动控制是指控制柔性机器人执行精确的位置和姿态变化。
传统的PID控制方法往往不适用于柔性机器人的运动控制,因为柔性臂具有较高的柔性和非线性。
因此,柔性机器人的运动控制方法需要考虑柔性臂的动力学特性和非线性建模方法。
力控制是指控制柔性机器人的力传递和接触力。
柔性机器人的力控制方法需要考虑柔性臂的力学特性和力传递的准确性。
目前,常用的柔性机器人控制方法包括模型预测控制、自适应控制和神经网络控制等。
综上所述,柔性机器人的机构设计和控制研究是该领域的重要研究方向。
机构设计的目标是实现柔性臂的精确运动和优化力传递,柔性机器人的机构设计方法包括柔性关节机构设计和柔性链条设计。
柔性机器人的控制方法需要考虑柔性臂的动力学特性和非线性建模方法,柔性机器人的控制方法包括运动控制和力控制。
柔性膝关节保护外骨骼及其行走助力方法设计
DOI: 10.3785/j.issn.1008-973X.2021.02.001柔性膝关节保护外骨骼及其行走助力方法设计杨灿军1,2,彭桢哲2,徐铃辉2,杨巍1,2(1. 浙江大学宁波研究院,浙江 宁波 315100;2. 浙江大学 机械工程学院,浙江 杭州 310058)摘 要:设计柔性可穿戴式膝关节保护外骨骼,用于实现人体运动过程中膝关节负载减重及行走助力功能. 根据人体生物力学特点,使用固体各向同性材料惩罚(SIMP )模型与有限元分析设计柔性外骨骼膝关节,该柔性关节在行走运动支撑期具有刚性,能够减轻膝关节体重负载,在摆动期柔性较强,能适应人体生理关节运动特性,不对膝关节造成额外载荷. 在柔性可穿戴式膝关节外骨骼结构的基础上,配套设计行走助力模块,研究相应的助力控制方法可以实现步行助力. 性能测试实验表明,单侧膝关节保护外骨骼最大能减轻110 N 的膝关节负载,外骨骼结构自身质量为639 g ,减重比大;带行走助力模块的外骨骼系统质量为4.8 kg ,能实现步行运动的助力功能.关键词: 柔性外骨骼;穿戴式外骨骼;膝关节保护;减重支撑;行走助力中图分类号: TP 242.6 文献标志码: A 文章编号: 1008−973X (2021)02−0213−09Design of flexible knee-joint protection exoskeleton andwalking assistance methodYANG Can-jun 1,2, PENG Zhen-zhe 2, XU Ling-hui 2, YANG Wei 1,2(1. Ningbo Research Institute , Zhejiang University , Ningbo 315100, China ;2. College of Mechanical Engineering , Zhejiang University , Hangzhou 310058, China )Abstract: A wearable flexible knee-joint protection exoskeleton was designed, which is used for knee-joint loadreduction and force assistance during body motion. The flexible knee joint was designed using solid isotropic material with penalization (SIMP) model and finite element analysis based on biomechanics features of lower limbs.The exoskeleton joint is rigid during stance period to help reduce the body weight load on the knee joint, and it shows flexibility during swing period to adapt to physiological joint kinematic characteristics of body. Therefore no extra force is loaded on the body joint. The walking assistance module was designed and added on the basis of this wearable flexible knee-joint exoskeleton mechanism. The corresponding assisting force control method was researched to realize walking assistance. The performance tests show that the knee joint protection exoskeleton can reduce the knee joint load up to 110 N. The weight of the wearable exoskeleton is 639 g, therefore the weight loss ratio is significant. The exoskeleton system with walking assistance module weights 4.8 kg. The walking test proves that the system has the ability to assist walking.Key words: flexible exoskeleton; wearable exoskeleton; knee-joint protection; weight reduction and support;walking assistance膝关节是人体最易受损的关节[1],降低膝关节载荷是防治膝关节病变的重要方法[2]. 在膝关节损伤后的康复锻炼过程中,减轻膝关节内力对康复过程有积极作用. 减轻膝关节内力的需求推动了膝关节外骨骼的研发与应用. 须设计一种外骨骼结构,能够显著减轻人体日常活动中的膝关节负载,为使用者日常生活带来便利. 同时,由于日常活动中,大部分有膝关节参与的运动姿态为行走运动,希望外骨骼设备具有行走助力功能.范渊杰[3]设计外骨骼下肢康复系统及硬件设备,针对患者需求提出递进式复合康复策略,能够实时准确识别使用者的运动意图. 史延雷等[4]收稿日期:2020−10−11. 网址:/eng/article/2021/1008-973X/202102001.shtml 基金项目:国家自然科学基金资助项目(51805469);浙江省食品药品监管系统科技计划资助项目(2020016).作者简介:杨灿军(1969—),男,教授,博士,从事人机智能系统研究. /0000-0002-3712-0538. E-mail :***********.cn通信联系人:杨巍,男,助理研究员,博士. /0000-0002-8177-1071. E-mail :***************第 55 卷第 2 期 2021 年 2 月浙 江 大 学 学 报(工学版)Journal of Zhejiang University (Engineering Science)Vol.55 No.2Feb. 2021提出由8个压缩弹簧协同组成的柔性输出机构并设计柔性关节,其抗冲击能力和柔性输出能力可以满足柔性关节型机器人的应用需求. 朱蒙等[5]设计制作的针对偏瘫患者的轻质下肢康复外骨骼具有质量轻、穿戴舒适的优点. Ikeuchi等[6]开发Bodyweight Support System,能够降低设备使用者的足底压力,为高龄使用者的生产、生活与工作提供帮助. Taketomi等[7]研发Hybrid Assistive Limb,设备基于肌电信号,感知人体的运动意图,为残疾人提供行走助力. Lee等[8]设计可穿戴式老年步行辅助装置S-Assist,为高龄使用者提供步态辅助,设备能够在衣服内侧穿戴,对髋关节与膝关节提供助力. Baser等[9]研发仿生柔顺性下肢外骨骼机器人BioComEx,可以用于负重与康复2种场合,能满足健康与瘫痪用户的步行辅助需求.上述研究通过设计支撑式结构,利用支撑式外骨骼跨过膝关节传递体重负载,实现减轻膝关节上载荷的目的.不过,对于刚性的外骨骼运动关节,若外骨骼关节转轴和人体关节的瞬时旋转中心没有严格对中,即使仅存在微小的误差时,人体关节上也会产生明显的额外载荷,关节受损与患病的风险将增大[10].尽管可以通过设计可调节式机构、增加关节自由度、设置多转轴解耦[11]等方法,解决人机关节旋转轴不对中的问题,但上述增加机构自由度的方法,使系统复杂度显著增大,给系统建模与控制策略的设计带来困难;同时,由于存在冗余自由度,外骨骼难以实现支持体重、减轻膝关节内力的功能.针对上述外骨骼设备的不足之处,设计制作柔性可穿戴式膝关节保护外骨骼系统,并对其进行试验. 系统延续了支撑式结构的设计,具有膝关节保护功能,能有效减轻膝关节内力,即胫骨与股骨间的正压力,减轻膝关节的磨损;在行走运动时,在膝关节起支撑作用的时间段内负担人体部分体重,减轻膝关节内力;在膝关节屈/伸运动时贴合人体膝关节的运动轨迹,表现为具有较强的柔性. 由于下肢最主要的运动方式为步行运动,基于膝关节保护外骨骼,添加行走助力模块,使外骨骼系统具有步行助力功能.1 人体运动分析人体实现行走、奔跑、跳跃等运动主要依靠下肢,其中行走运动最为常见,其周期规律性也最强.下肢自由度主要分布在髋关节、膝关节和踝关节上[12],行走步态由关节角度确定;膝关节内力的大小也与人体步态紧密相关[13].1.1 下肢运动范围如图1(a)所示,标定人体3个互相垂直的基本面,即矢状面、额状面和水平面. 行走运动主要发生在矢状面,额状面和水平面的运动不甚显著.粗糙的模型可以忽略额状面和水平面的运动,但在分析实际运动时必须对三者进行综合分析. 如图1(b)、(c)所示为主导下肢运动的6个自由度,各自由度的运动范围如表1所示. 设计的外骨骼机构不能对人体自由运动造成干涉. 若外骨骼包含上述自由度,其运动极限应当大于上述关节运动范围.水平面膝关节踝关节髋关节旋外伸屈/伸趾屈外翻外展内收(a) 人体基本平面(b) 下肢关节骨骼下肢自由度分布图 1 人体运动面与下肢自由度分布[13]Fig.1 Human motion surface and distribution of lower limb freedom表 1 下肢各关节的运动范围Tab.1 Motion range of each lower limb joint关节运动步行运动范围[14]运动极限[15]髋关节旋内/旋外 1.6°/13.2°50°/40°髋关节屈/伸32.2°/22.5°120°/30°髋关节外展/内收7.9°/6.4°20°/45°膝关节屈/伸73.5°/0°150°/0°踝关节背屈/趾屈14.1°/20.6°20°/40°踝关节内/外翻16.5°/25.7°20°/35°1.2 行走运动的周期性行走运动的一个完整步态周期从足跟着地开始,到同一足跟再次着地为止[16]. 根据下肢在整个正常步态周期中的运动,将完整的一步划分为支撑期和摆动期,支撑期指从足跟着地到足尖离地,即足底与地面接触的阶段;摆动期指从足尖离地到足跟着地,即足部离开地面的阶段. 人体行走运动的关节角度和关节力矩变化具有周期性[14],不同行走速度下的关节角度曲线周期不同而形状相似[17].214浙 江 大 学 学 报(工学版)第 55 卷2 外骨骼结构设计在行走运动期间,外骨骼的柔性膝关节在关节运动期间表现出柔性,在关节提供体重支撑时具有较强的刚性. 为了减轻外骨骼质量,减小外骨骼体积,便于外骨骼的携带与穿戴,放弃常见的与下肢等长、从臀部延伸至地面的长杆式外骨骼结构,选择使用固联环-柔性关节的绑腿结构. 外骨骼在人体自有的胫骨-膝关节-股骨体重支持和重力传递链上,并联了大腿-固联环-外骨骼关节-固联环-小腿的支撑传力链,一部分的体重负载经过外骨骼柔性关节,跨过人体膝关节作用在小腿上,减轻了膝关节内力,实现了膝关节保护功能.µ=0.5固联环与皮肤接触产生压力,在人体膝关节支撑体重时,外骨骼关节上支持力的反力作用在固联环上,环与腿部皮肤产生静摩擦力. 摩擦力“推开”股骨与胫骨,减小关节内的正压力,实现减轻膝关节内力的目的. 故外骨骼膝关节对体重负载的减轻作用由柔性关节的支持力决定,与环上的压力正相关. 环作用在腿部的压力会阻碍血液循环,压力的上限影响外骨骼的关节保护性能的大小.认为支持力全部由正压力产生,令压力上限为200 N ,暂定摩擦系数[18],则外骨骼的负载减轻作用为不小于100 N ,相当于10 kg ,约为体重的18%.设计外骨骼所需的人体物理参数[19]如表2所示. 其中长度取10%~90%分度,体重取中位数. 为了提高外骨骼的穿戴性能,其结构应当尽可能贴合人体物理尺寸. 基于柔性与刚性需求,考虑材料特性与制造难度,使用聚乳酸(polylactide ,PLA )与熔融沉积成型(fused deposition modelling ,FDM )工艺制造外骨骼柔性关节及穿戴结构.表 2 人体物理参数Tab.2 Physical parameters of human body大腿长/mm大腿围/mm小腿围/mm体重/kg452−29+30408−44+51353−49+49562.1 柔性关节设计使用固体各向同性材料惩罚(solid isotropic material with penalization ,SIMP )模型方法设计关节[13],其几何形状应当同时满足体重支持时的高刚性和关节屈曲时的高柔性需求,可以表述为c ρ(x )0⩽式中:为机构柔性;为广义材料密度,Dρ(x )d D ⩽V 0⩽ρ(x )⩽1.0D V f t u Γt t ,,为材料的设计区域,为材料体积有效分布;为施加载荷;为作用在计算区域上的力;为位移矢量;为作用力产生的形变对应的位移曲线.ρ(x )→1.0ρ(x )→0计算结果如图2所示,即广义材料密度分布云图. 说明须保留材料以提供刚性,说明此处的材料无须承受较大的载荷,或应当去除材料以满足柔性需求. 为了实现柔性需求,当关节发生旋转后,接触区域应当发生明显形变,适应人体膝关节滑移引入的瞬时转轴位移.设计柔性关节如图3(a )所示. 对其施加200 N 对心载荷,得到如图4(a )所示的应力云图,左、右图分别对应运动状态为支撑体正对齐和错开. 在柔性关节上应力处于许用强度范围内,能够满足刚性需求. 考虑实际穿戴场合,由于使用固联环结构,柔性关节支杆难以与腿骨严格平行,应当考虑柔性外骨骼关节受到载荷方向偏离几何圆心的情况. 使用有限元分析(finite element analysis ,FEA )方法,在一对完整的内外环上施加方向对准或偏离几何圆心的载荷,其应力云图如图4(b )所示,其中左图中内外圆盘对心,右图中内外圆盘偏心角度选为20°,柔性关节摆角处于柔性与刚性需1.05×105×100.90.80.70.60.50.40.30.20.11.00.90.80.70.60.50.40.30.20.120°主结构次结构边界载荷(a) 外环(b) 内环点载荷次结构固定约束ρρ图 2 柔性关节广义材料密度云图[13]Fig.2 Generalized material density nephogram of flexible joint第 2 期杨灿军, 等:柔性膝关节保护外骨骼及其行走助力方法设计[J]. 浙江大学学报:工学版,2021, 55(2): 213–221.215求的过渡区,且仍须具有较强的刚性. 受到对心压力时的仿真结果与SIMP方法得到的应力云图相似,但当受到偏心压力时,以加载20°偏心载荷为例,云图上应力较大的区域对应如图3(a)所示的镂空结构,说明设计存在缺陷. 因此优化支撑体结构,得到如图3(b)所示的柔性关节. 使用FEA方法得到柔性关节不同摆角下受到对心载荷的应力σ或形变ε云图,如图4所示. 柔性关节保有符合设计需求的刚性,对其在不同摆角下的受力进行仿真,仿真结果如图5所示. 图中,C e为外骨骼关节形变率. 当摆角为45°时,在受100 N载荷条件下,其载荷主要作用在次结构上使得外骨骼柔性增大,如图5(e)所示;当摆角达到60°时,受20 N 载荷即可产生较大形变,如图5(f)所示. 上述仿真结果证明该柔性关节方案满足设计要求.2.2 膝关节穿戴结构设计在自由行走时,由于小腿具有自然弧度,小腿中段较膝关节外缘更向外一段距离. 为了利用这段距离,同时获得更大的空间便于排布助力结构,将柔性关节置于身体的外侧(即左膝左侧、右膝右侧). 利用下肢肌肉曲线,固联环分别“顶住”大腿肚与小腿肚,增大支持力.内环(a) SIMP 法柔性关节结构(b) 优化设计图 3 柔性外骨骼关节设计图Fig.3 Design sketch of flexible exoskeleton joint14.985.0004.3753.7503.1252.5001.8751.2500.6252.880 5×10−711.5705.0004.3753.7503.1252.5001.8751.2500.6257.989 2×10−6(a) 基于SIMP 法设计的柔性关节(b) 内外圆盘加载应力分析1.974 5 1.755 40 1.536 30 1.317 20 1.098 10 0.879 01 0.659 91 0.440 81 0.221 71 0.002 60417.723 15.755 13.787 11.819 9.851 1 7.883 0 5.914 9 3.946 8 1.978 7 0.010 599σ/MPaσ/MPaσ/MPaσ/MPa图 4 SIMP法的设计与验证Fig.4 Simulation and verification of SIMP method13.1145.0004.3753.7503.1252.5001.8751.2500.6251.467 3×10−711.1525.0004.3753.7503.1252.5001.8751.2500.6255.734 1×10−6(a) 内外环支撑体对心, 500 N 载荷(b) 摆角 10°, 200 N 载荷(d) 30°, 100 N 载荷(c) 摆角 20°, 200 N 载荷(f) 摆角 60°, 20 N 载荷(e) 摆角 45°, 100 N 载荷15.3133.000 002.625 002.250 001.875 001.500 001.125 000.750 010.375 011.414 4×10−50.575 250.511 340.447 420.383 500.319 580.255 670.191 750.127 830.063 9173.146 402.796 802.447 202.097 601.748 001.398 401.048 800.699 210.349 6020.6055.0004.3753.7503.1252.5001.8751.2500.6252.747 9×10−6σ/MPaσ/MPaσ/MPaε/mmσ/MPaε/mm图 5 优化后的应力与形变云图Fig.5 Stress and deformation nephogram after optimization216浙 江 大 学 学 报(工学版)第 55 卷在柔性关节上添加支杆与固联环联接. 结合穿戴需求与可调性要求,利用如图6(a )所示的原理设计柔性关节连接件与固联环. 完成的装配体如图6(b )所示. 小腿环内侧周长为345~387 mm ,大腿环内侧周长为413~471 mm ,因为须预留一定的厚度,以添加增大摩擦力所需的内衬,上述方案符合设计需求.前侧固联环柔性关节连接件后侧固联环R1R(a) 固联环的设计原理大腿固联环小腿固联环柔性关节(b) 膝关节保护外骨骼装配体结构设计图与爆炸视图图 6 可穿戴式外骨骼结构设计Fig.6 Structure design of wearable exoskeleton2.3 髋关节助力机构设计为上述机构添加行走助力模块,为髋关节前摆和膝关节后摆提供助动力矩. 传统外骨骼设备将质量较大的电机与减速机构布置在肢端,在设备运动时表现出较大的惯性,穿戴设备后的行走步态会产生明显畸变,同时较大的额外质量也为设计控制系统带来困难. 为了使设备便于穿戴、减少肢端运动惯性,设计将助行模块置于背包中,使用牵引绳拉动下肢实现行走助力. 在双侧固联环上设计受力点.γT 在使用牵引绳助力时,布置发力点与穿戴者腰部同高,外骨骼结构确定了助力作用受力点的位置. 如图7(a )所示,定义牵引角为助力髋关节前摆的牵引绳上拉力方向与下肢瞬时速度方向之γT T 1γ¯γhip ≈76.9T ≈T 1≈间的夹角. 越大,在髋关节上正压力的分力越大,髋关节更易磨损. 根据几何关系计算随时间的变化,得到髋关节牵引角对时间的平均值,牵引角较大. 当牵引绳提供8 N·m 的转矩时,使用功率关系计算200 N ,195 N ,对人体髋关节造成了额外的载荷.αF cos αF sin α为了消除这一载荷,设计凸轮结构助力髋关节前摆. 凸轮受电机-牵引绳助力系统驱动,驱动转矩恒定;助力力臂恒定,其大小由穿戴在髋关节下侧的腿环上滑轮轴承与髋关节运动转轴的距离确定. 因此机构输出的助力大小由压力角唯一确定. 垂直于股骨的分量助力行走运动,平行于股骨的分量沿股骨向下,减轻髋关节的关节内力,在一定程度上保护髋关节. 穿戴膝关节保护模块与髋关节助力模块的人体下肢受力情况如图7(b )所示.φh 使用反转法设计凸轮. 根据髋关节屈/伸摆动角度随时间变化关系[14],设计凸轮摆动从动件摆角随时间变化曲线,如图7(c )所示. 图中,为摆动从动件摆角,s 为时间序列. 临床步态分析(clinical gait analysis ,CGA )数据库将一步平均划分为51个时间间隔,间隔长短决定单步时长. 依据CGA 的步态时间划分方法标记时序绘制从动件摆角变化曲线. 基于摆角随时间变化关系绘制凸轮滚子T hip T kneeV γT 1膝关节小腿VT 1T kneeT hip γ大腿小腿膝关节(a) 膝关节绳牵引外骨骼受力分析(b) 髋关节绳牵引外骨骼受力分析40图 7 髋关节助力机构设计Fig.7 Design of hip-joint assist mechanism第 2 期杨灿军, 等:柔性膝关节保护外骨骼及其行走助力方法设计[J]. 浙江大学学报:工学版,2021, 55(2): 213–221.217轨迹,如图7(d)所示.2.4 行走助力设计根据上述设计结构,设计基于位置控制的行走助力方案,利用穿戴整机后助力的柔顺性检测结构设计的合理性与可靠性. 基于人体双侧运动具有半个周期相位差的特点,对于一对左右对称的驱动点,同一时刻只须对单侧运动提供助力.为了减轻设备质量,提高驱动单元的使用效率,设计使用2个电机分时复用,其中一个电机助力髋关节屈/伸运动的前摆,另一个助力膝关节屈/伸运动的后摆. 以助力膝关节运动为例,对于左侧摆动相膝关节屈曲,电机牵引左腿外骨骼上的受力点实现助力,在助力完成后,电机回退,接着牵引右腿外骨骼上的受力点助力右腿运动,如此往复. 应当准确规划助力滑块的运动轨迹,同时在双侧的牵引绳上留出足够的裕量,使牵引绳上两侧的运动解耦. 在驱动模块进行助力时,不应因为运动规划不恰当,使滑块与受力点的距离大于预留的牵引绳长度,滑块卡住牵引绳,限制助力侧对侧的自由运动. 由于腿环紧缚在腿上,利用人体下肢肌肉形成的自然曲线凸起,在牵引助力时,腿环能够固定在预设的位置,不会与下肢发生相对位移.设计牵引绳助力方案应当满足下述条件:1)在助力时间段内均匀实现柔顺助力;2)对双侧的助力在时间上没有重叠;3)在电机助力时,机构只对需要助力的一侧有作用力,且不会因处于不适当的位置对另一侧产生阻力;4)电机在助力之外的时间段应当留出足够的裕量,不会在2段助力之间由于电机牵引线绳位置变化引入阻力;5)2个电机的助力相对人体运动周期应当是“同步”的,2条电机助力曲线到行走步态的映射得到的结果不应存在相位差. 根据几何关系,基于上述要求设计的驱动曲线,绳端位移关系如图8所示.图中,x h、x k分别为髋、膝关节助力绳端位移,αh、αk分别为髋、膝关节角度. 图中特别绘制了行走运动起始阶段助力模块适应步态的情况. 助力曲线描述了绳端向人体左右两侧运动与行走助力,关节角度曲线对应单侧关节在步态周期内随时间变化关系.3 外骨骼设备性能测试使用PLA与FDM工艺制造上述可穿戴式外膝关节保护外骨骼,完成的穿戴结构质量为639 g.加入行走助力模块,整套设备不包括电池的质量为4.8 kg. 设备穿戴效果如图9所示.图 9 外骨骼整机系统穿戴效果图Fig.9 Wearing effect of exoskeleton system在调整设备与个体契合后,从完全脱下设备开始计时,到穿戴设备完成,开机即可实现行走助力功能为止,平均用时约1.5 min,穿戴方便. 由于设备按模块设计,穿戴前各模块是分离的,穿戴自由度高,不严格限制各个模块的穿戴顺序;使用者可以自行选择仅穿戴膝关节保护外骨骼,还是搭配行走助力模块使用. 连续运行设备,设备在助力行走过程中助力柔顺,没有出现突然施加作用力的震颤感;牵引助力不会使腿环相对下肢产生位移,腿环在整个助力过程中,固定在设计的位置上;设备在启停过程中没有出现抖动、卡顿的现象.3.1 膝关节保护性能测试柔性关节支杆在受载荷作用时发生形变. 在支杆颈部黏接应变片,应变片形变时的电阻变化反映支杆上压力的变化,由此可以推算膝关节内力的减小量. 如图10所示,对于2.2节所述的柔性关节,分离其带支杆柔性膝关节外环,将受试点置于外环颈部.切除受试点下侧的复杂结构,得到试样,该试样能保留受试点附近的机械结构与特征. 根据圣维南原理,在受试点附近,形变与应力接近均匀分布.图 8 髋关节与膝关节助力的绳端位移曲线与关节角度Fig.8 Cable displacements and joint angles for hip joint and kneejoint force assistance218浙 江 大 学 学 报(工学版)第 55 卷根据上述方法得到作用在柔性关节外环上载荷与受试点应变的关系. 穿戴外骨骼,由不同位姿下外环受试点应变推算柔性关节上的载荷,等价于膝关节内力的减少量. 从支杆颈部附近切分出试样. 在相同工艺与加工条件下制造一批外环与试样,以电桥法黏接应变片,测试得到载荷-应变关系,并推算穿戴外骨骼结构后作用在柔性关节上的载荷.ε1P 将试样置于万能试验机的加载平台上,导线以全桥方式接入应变仪. 得到试样的载荷-微应变关系如图10所示. 图中,为微应变,为垂直作用在支杆上的载荷. 4条直线斜率平均值为20.22,即实验表明,FDM 工艺制造的PLA 零件是线弹性的,载荷与应变呈线性关系;其黏弹性特性不甚显著,卸荷后残余应变可以忽略. 零件受到高频交变的载荷后不会累积应变.穿戴设备进行试验,如图11所示. 分别对行走运动的站立姿态(见图11(a ),膝关节摆角为0°),支撑期(见图11(b ),膝关节摆角为20°),与摆动期(见图11(c ),膝关节摆角为35°)进行试验,分别检测外骨骼的体重支持能力与运动柔性.对支撑期外骨骼减重能力进行试验. 如图12所示为测量固联环与下肢通过不同材料接触、环束缚的松紧程度不同、外骨骼关节旋转角度不同时的应变. 图中,ε2为应变片应变. 选用5 mm 厚的硬质橡胶增大静摩擦力. 图中,在测量角度范围内最大应变为2 280×10−6,对应外骨骼上载荷约为112.8 N ,相当于11.51 kg. 依此类推,实验数据与处理结果如表3所示.可以看出,膝关节保护外骨骼最大能对单侧膝关节提供不小于100 N 的支持力,作用在站姿的每侧膝关节或行走运动支撑期单侧膝关节上的体重载荷减少值>98 N ,约为人体自重的17.9%. 穿戴结构能明显减少膝关节内力,实现膝关节保护功能;减重等效质量与模块自身质量之比为15.65,减重比显著.测试膝关节摆动时外骨骼关节的柔性. 如图12所示,测量足部悬空时,人体行走运动中不同位姿,即柔性膝关节不同摆角下柔性关节受试点的应变. 实验记录了2组. 微应变绝对值最大为250×10−6,对应12.36 N 的载荷,负号代表拉应变作用在外骨骼关节上,人体膝关节之间产生了分离的趋势,柔性关节在不显著的程度上阻碍了膝关节胫骨与股骨的分离. 柔性关节在这一行走运动时间段内不会增加膝关节内力,实现了柔性的设计表 3 不同条件下柔性关节上载荷Tab.3 Load results of exoskeleton joint under different condi-tions序号测试条件ε1 /10−6P /N 1腿环接触涤纶衣物1 06652.722黏接硬橡胶接触衣物,松束缚1 15056.873黏接硬橡胶,中等束缚1 44571.464黏接硬橡胶,紧束缚2 083103.00400受测点图 10 应力等效试样及测试数据Fig.10 Stress equivalent sample and test data(a) 站立姿态(b) 支撑相(c) 摆动相图 11 穿戴外骨骼膝关节保护结构进行试验Fig.11 Test while wearing knee-joint protection exoskeleton图 12 膝关节转角与外骨骼关节应变关系Fig.12 Relationship between knee-joint rotation and exo-joint strain第 2 期杨灿军, 等:柔性膝关节保护外骨骼及其行走助力方法设计[J]. 浙江大学学报:工学版,2021, 55(2): 213–221.219目的. 图12中分列的2组曲线分别对应支撑相与摆动相的摆角-应变关系,由于在足部离开地面时,单侧膝关节不再支撑体重,内力迅速消失,柔性关节支杆上应力存在突变,故2组曲线分立.综上所述,柔性膝关节在支撑期显著减少了膝关节内力,实现了目标的膝关节保护功能;同时柔性关节在摆动期表现出较强的柔性,不会对膝关节造成额外的负载与伤害.3.2 行走助力模块性能测试驱动模块的有效输出功率等于其助力时的输出功率减去空载时的输出功率. 测量加入负载前、后驱动模块2个电机各自电流随时间的变化关系,如图13所示. 图中,I uh、I Lh分别为髋关节助力电机的无负载输出电流、带负载输出电流,I uk、I Lk分别为膝关节助力电机的无负载输出电流、带负载输出电流. 髋关节助力电机空载时平均电流为1.662 A,空载功耗为39.9 W;膝关节助力电机平均电流为1.661 A,空载功耗40.0 W.图 13 加入单侧负载前后输出电流和绳端位移的变化Fig.13 Output current and rope ends displacement before and after adding one-side load加载单侧载荷测试助力模块的有效功率. 对于髋关节助力电机,在助力髋关节前摆时,负载受牵引力,驱动模块对外做功. 2条输出电流曲线差值为加载前、后电机电流的变化量,表现为驱动模块对外做功的电流. 图中,s为CGA数据库采样时间间隔的衍生. 假定2个时序点间隔10 ms,则步态周期为1.02 s,速度约为1.5 m/s. Kim等[20]实验得到在该速度下人体自由行走功耗为3.95 W/kg.助力时间段内电流差的平均值为2.85 A,其在整个步态周期上的平均功率为14.74 W,双侧助力时有效平均功率为其2倍,即29.47 W. 同理可得,在膝关节助力电机助力时段内电流差的平均值为2.67 A,其对整个步态周期的平均功率为16.93 W,双侧助力时有效平均功率为33.86 W. 假定步行速度为1.5 m/s,驱动模块输出到减速机构上的做功功率为63.30 W. 机械效率按80%计算,作用在人体上的功率约为50.00 W. 模块在行走运动时对运动肢端做功,能助力行走运动,实现了设计目的.4 结 语根据人体生物力学特点,针对减轻膝关节负载、保护膝关节的需求,设计柔性可穿戴式膝关节保护外骨骼系统. 外骨骼结构的核心为柔性关节,其内外环支撑体在人体膝关节提供支持功能时对准,刚性较强,能减轻膝关节的负载;在膝关节摆动时支撑体错开,具有适当的柔性,不会对人体膝关节造成额外负载. 性能测试实验表明本研究设计的外骨骼能对单侧膝关节提供100 N以上的支持力,作用在站立时的每侧膝关节或行走运动时步态支撑相的单侧膝关节上的体重载荷能减轻110 N以上,显著减少作用在人体膝关节上的压力,实现膝关节保护功能. 减重等效质量与模块自身质量为15,减重比显著. 基于人体行走运动特点,为外骨骼结构配套行走助力模块,添加的行走助力模块能够减少人体行走运动功耗,设备具有行走助力功能.所设计的膝关节保护外骨骼在其他应用场景也存在较大应用潜力. 通过合理利用外骨骼机构的运动自由度,可以对上下楼梯、上下斜坡、奔跑等人体运动进行助力,且降低关节损伤风险. 在助力控制与步态感知方面还须进行许多优化工作.对于行走助力部分,现有的助力方式能够证明该设备确实能够助力人体行走,但助力效果仍存在较大提升空间. 例如,将电机的控制模式由位置控制改为力矩控制,可以增强系统的鲁棒性. 控制系统可以搭载步态感知算法,使外骨骼设备能够在人体行走速度不同,或速度不断变化时,实时跟随人体步态,准确助力人体行走运动,实现人机互感互通的步行助力功能.220浙 江 大 学 学 报(工学版)第 55 卷。
变刚度柔性驱动关节的设计与控制研究共3篇
变刚度柔性驱动关节的设计与控制研究共3篇变刚度柔性驱动关节的设计与控制研究1随着人们对机器人性能和灵活性的日益追求,柔性驱动关节在机器人行业中得到了广泛应用。
柔性驱动关节是机器人关节的一种新型驱动方式,通常由柔性元件替代传统的电机和减速器等刚性驱动部件,实现机器人关节自身的柔性变形和更高自由度运动控制。
本文将介绍变刚度柔性驱动关节的设计与控制研究。
1. 变刚度柔性驱动关节的设计在机器人领域,机器人自身的柔性和负载变化的不可避免性常常成为限制机器人性能优化的因素。
因此,设计变刚度柔性驱动关节是实现机器人高性能和高灵活性的有效途径。
变刚度柔性驱动关节设计主要分为以下步骤:1.1 柔性元件设计柔性元件是变刚度柔性驱动关节的核心组成部分,其能够替代传统的刚性传动装置,同时能够在力作用下发生变形,满足柔性控制的需求。
柔性元件的设计需要考虑以下因素:(1)材料的选择:柔性元件需要具备良好的柔性和强度,较为常见的材料有弹性元素、合金材料和液压元素等。
(2)几何结构的设计:柔性元件的结构设计应该尽可能地精确地反映出柔性特性。
例如,可以采用薄板弯曲、弹簧、气动气囊等结构。
1.2 驱动机构的设计驱动机构主要由电机、减速器和传感器等组成。
减速器和传感器是实现运动控制的重要组成部分。
而驱动机构也要考虑到柔性元件的特殊性,确保柔性元件的变形过程中对其不会产生不利影响,是驱动机构设计的重点。
1.3 结构设计结构设计应该同时考虑柔性元件的变形和驱动机构的特殊性质来实现柔性控制。
变刚度柔性驱动关节主要包括关节和骨架两部分,其中关节的柔性控制是较为复杂的问题。
关节的设计应该满足力的传递和柔性变形等要求,同时保证结构的稳定性和工艺可行性。
2. 变刚度柔性驱动关节的控制研究为了实现多自由度的柔性控制,变刚度柔性驱动关节需要做到位置、速度和柔性控制等多种控制方式。
位置控制和速度控制是较为传统的控制方式,柔性控制则是变刚度柔性驱动关节的创新点。
机械设计中的柔性机构设计与控制

机械设计中的柔性机构设计与控制柔性机构在机械设计领域中起着重要的作用,它们能够提供灵活性、高效能和精确控制的特性。
本文将探讨机械设计中的柔性机构设计与控制的相关内容。
一、什么是柔性机构?柔性机构指的是具有较高柔性和变形能力的机械构架。
相对于传统的刚性机构来说,柔性机构能够实现更大范围的运动和变形,从而适应不同的工作环境和任务需求。
柔性机构通常由弹性杆件和关节连接构成,通过合理设计这些杆件和连接方式,可以实现所需的机械输出。
二、柔性机构的设计原则1. 功能需求分析:在设计柔性机构之前,首先要明确设备或系统的功能需求。
只有了解了所需的运动范围、精度和负载能力等要求,才能有针对性地设计柔性机构。
2. 材料选择和梁设计:柔性机构的核心是弹性材料,材料的选择将直接影响结构的性能和可靠性。
常用的材料有金属弹簧和复合材料等,根据具体应用需求进行选取。
梁的设计是柔性机构设计过程中的关键环节,需要考虑梁的长度、高度、宽度等参数,以及材料的特性,来满足机构的工作要求。
3. 关节设计与布局:柔性机构的关节连接与限位方式决定了机构的运动范围和精度。
关节可以采用球接头、铰链等形式,布局要合理,以保证机构的连续性和稳定性。
4. 激励和控制系统设计:柔性机构的控制是实现其预期功能的关键。
通过合理的激励方式以及传感器的应用,可以实现对柔性机构的控制和调节。
此外,控制系统的设计和参数调优,也是保证机构稳定性和高效性的重要环节。
三、柔性机构在机械设计中的应用柔性机构在机械设计领域有广泛的应用,以下列举了其中的几个典型案例:1. 机械手臂:柔性机构的高精度和大范围运动特性,使其成为机械手臂设计的理想选择。
通过合理设计关节和弹性杆件的布局,可以实现多自由度运动和精确定位。
2. 适应性结构:柔性机构可以应用于各种场景下的适应性结构,如可折叠和可伸缩的结构。
这种机构可以根据需要进行形变,从而适应不同的工作环境和任务需求。
3. 振动控制:柔性机构在振动控制方面具有优势,可以通过合理的设计和控制手段来减小振动幅度。
面向足式机器人的新型可调刚度柔性关节的设计及性能测试_尹鹏

第36卷第3期2014年5月机器人ROBOT V ol.36,No.3May,2014DOI:10.3724/SP.J.1218.2014.00322面向足式机器人的新型可调刚度柔性关节的设计及性能测试尹鹏,李满天,郭伟,王鹏飞,孙立宁(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江哈尔滨150080)摘要:为提高足式机器人的运动适应能力,为其设计了一款具有刚度连续调节功能的新型柔性旋转关节.通过研究杠杆机构输出刚度与传动比的对应关系,提出以变传动比杠杆机构作为核心部件进行可调刚度柔性关节的设计.文中对关节的结构以及关节驱动方式等进行了紧凑化设计,以满足足式机器人系统对体积及重量的要求.在设计中通过分析关节输出刚度系数与关节相关结构参数之间的关系,为关节输出刚度调节选择了较为敏感的参数调节范围,提高了刚度调节的灵敏性.在此基础上,通过开展机构运动学分析,确定了关节机构的理论刚度输出固有特性.关节样机测试表明,该调节机构能够实现关节输出刚度的调整和有效控制,该关节在结构设计以及功能方面均可以满足在足式机器人腿部结构中的应用需求.关键词:足式机器人;柔性关节;刚度调整;杠杆机构中图分类号:TP242.6文献标识码:B文章编号:1002-0446(2014)-03-0322-08Design and Testing of a Novel Joint with Adjustable Stiffness for Legged RobotYIN Peng,LI Mantian,GUO Wei,WANG Pengfei,SUN Lining(State Key Laboratory of Robotics and System,Harbin Institute of Technology,Harbin150080,China)Abstract:In order to enhance the locomotion adaptability of legged robots,a novel compliant rotational joint with contin-uously adjustable stiffness is designed.To achieve this,the relation between transmission ratio and output stiffness of lever mechanism is analyzed,and the lever mechanism with variable transmission ratio is utilized as a core functional module in the design of the compliant joint with adjustable stiffness.The joint is designed to be light weight and compact in size,and the joint’s mechanisms as well as driving module are specified for practical applications to legged robots.The relationship between joint structure parameters and output stiffness is analyzed,and the range of the relevant parameter is selected so that the output stiffness can be sensitive to the parameter change.The natural stiffness characteristics of the joint are further de-termined based on kinematic study.Tests on the prototype joint show that the output stiffness can be adjusted and controlled effectively by the adjusting-mechanism,and the joint can be applied to robotic legs with respect to its structure design and functions.Keywords:legged robot;compliant joint;stiffness adjustment;lever mechanism1引言(Introduction)足式机器人是移动机器人平台的一个重要分支,它采用同动物类似的非连续支撑行走方式,在物资输送、搜索救援、竞技娱乐等领域具有广阔的应用发展前景,受到各国研究机构和学者的广泛关注.德国耶拿大学、瑞士联邦理工学院、美国密歇根州立大学以及卡耐基·梅隆大学等众多科研院所都在深入开展相关领域的研究,其中Boston Dynamic公司于2005年展示的BigDog四足机器人以及最近推出的Atlas双足机器人以其优异的运动能力为该领域树立了新的标杆,将足式机器人的研究推向了新的高度.作为移动平台,足式机器人需要适应复杂多变的地面状况并抵御外界环境对其运动的干扰,其运动方式趋向于选择动态行走的方式(跑、跳等不同于静态稳定行走的步态)以提高步态的效率和灵活性.解决足式机器人动态运动中的能效问题并提高其运动适应能力是该研究领域的重要课题.生物进化的历程不但造就了动物形式的多样化,同时也使其身体结构以及运动机能在这一进程中得到了选择和优化,因此研究动物运动系统的机能并加以借鉴是研究足式机器人的重要手段.基金项目:国家863计划资助项目(2011AA404701);国家自然科学基金资助项目(61005076);机器人技术与系统国家重点实验室自主课题(SKLRS201006B).通信作者:李满天,limthit@收稿/录用/修回:2013-08-07/2013-12-03/2014-01-17第36卷第3期尹鹏,等:面向足式机器人的新型可调刚度柔性关节的设计及性能测试323大量的动物运动实验测试分析表明,动物在动态运动时其由骨骼、肌肉、肌腱等组成的运动系统可近似于负载弹簧倒立摆系统(SLIP模型),通过弹簧的压缩和释放降低系统能耗[1-2],该模型作为动态行走的基本模型被学者们广泛接受,通过在机器人腿部结构中加入弹性元件,该模型被应用到足式机器人系统的设计中[3-5].另一方面,随着运动速度、步态频率以及地面刚度的不同,动物会对腿部的输出刚度特性作出相应的调整,以使其处于最佳运动状态[6-8].因此,机器人腿部采用可调节刚度的柔性关节对提高机器人的运动适应能力有积极意义.Riese在对机器人弹跳模型的研究中指出,腿部参数的调整可以提高弹跳运动的稳定性[9];Galloway的研究表明,腿部刚度调整有助于提高机器人的运动效率,同时提高其运动鲁棒性[10];此外,Hurst在单腿机器人BiMASC中引入拮抗驱动变刚度柔性关节,但由于机构传动环节摩擦过大引入的负面效应,其刚度调节机构在后续的改进中被取消[11].van Ham在被动行走双足机器人Veronica 上采用了MACCEPA关节,该关节实现了对机器人行走步态的调节,但关节的能量存储和关节驱动功率的限制使其没有实现跑跳的步态[12].为使机器人在跑跳步态下实现腿部不同的刚度输出,其关节处需要具备足够的能量储存能力以及被动运动范围.为了实现机器人动态行走,关节应采用轻量化和紧凑化的设计.针对可调刚度机器人关节,现阶段IIT(意大利理工学院)、DLR(德国宇航中心)以及国内一些研究机构均取得了一定的研究进展,推出了不同的关节样机[13-18],然而其样机主要用于机械臂的控制以及柔性机构的研究.IIT 的AwAS关节实现了较大的关节刚度调节范围,但其结构限制了关节的被动柔性运动范围,另一方面该关节没有在尺寸和重量上进行特别的关注,不便在足式机器人上应用.DLR的VS-Joint通过调节不同的预紧力来实现关节输出刚度的调节,其刚度调节需要较高的能量输入,在一定程度上限制了关节的小型化设计.本文基于目前可变刚度机器人关节的研究现状,针对足式机器人的应用需求,以变传动比杠杆机构为核心展开关节的研究,在进行刚度调节机理分析的基础上进行了柔性关节样机的研制,通过样机测试验证了该可调刚度柔性关节的可行性.2刚度调节机理分析(Analysis of stiffness-adjusting mechanism)柔性关节通过弹簧的弹性形变进行能量的存储,因此将杠杆机构在一端与直线弹簧相连(图1中B位置),弹簧另一端与旋转支点O处于相同的机架上,在杠杆上施加空间上方向恒定的力F与弹簧作用力相平衡,力作用线与杠杆交点位置标记为A点,如图1所示.其中,输入和输出力臂分别为弹簧和输出力F距离支点的距离L和l,直线弹簧压缩刚度为K S.图1杠杆机构输出刚度分析Fig.1Stiffness output of lever mechanism对于杠杆机构,定义其两受力点之间直线运动的传动比为γ=L/l,作用力F关于该作用点位移的偏导为杠杆机构的输出刚度K J.K J=∂F∂d(1)通过计算微位移的方法推导机构此时的输出刚度,假设空间作用力发生∆F的改变,相应弹簧以及空间力F的位移分别为∆D和∆d.在杠杆位移量很小的情况下,可以将输出端在位移范围内的平均刚度作为机构的输出刚度.当系统平衡时系统内输入的能量全部存储在弹簧中:12K S∆D2=12K J∆d2(2)机构中的直线位移与其传动比相关,此时的输出刚度为K J=K Sγ2(3)通过改变机构的传动比能够对机构的输出刚度产生影响,输出刚度范围的调整能够通过改变机构传动比来实现.随着机器人运动状态的改变,其杠杆机构力输出端A处的直线输出刚度应当可以从较小状态逐渐增大到需要刚度.从调整策略上可以将图1中空间作用力的作用点A作为调整位置,通过控制其在支点和弹簧支架间的位置来满足调整需要,在这种配置下,机构A、B端的直线运动传动比始终大于1,当A点移动到接近支点处的时候,机构近似于刚性连接.随着传动比的变化,杠杆输出刚度在理论上可实现在弹簧刚度K S和刚性输出之间进行调节.324机器人2014年5月3可调刚度柔性关节机构设计(Design of the flexible joint with adjustable stiffness )可调刚度柔性关节是柔性关节的一种,为了获取所需的被动柔性输出特性,在柔性关节机构力矩输入和力矩输出结构之间增加有弹性元件,可调刚度柔性关节的关节弹性通过机构可以进行进一步调节,其示意图如图2所示.其中驱动电机为关节提供力矩输入,调节关节输入的平衡位置(零负载时图2可调刚度柔性关节功能示意Fig.2Schematic of the adjustable stiffness joint3.1基于变传动比杠杆机构的刚度调节分析第2节分析了杠杆机构里输出端的直线输出刚度与其传动比的关系,对于足式机器人关节的旋转运动,需要对机构中的旋转运动传动比进行调节.纯杠杆机构的旋转传动比恒为1,需要对关节杠杆机构的配置进行调整,以改变关节旋转运动传动比.图3为可调刚度柔性关节基于杠杆机构的运动输出机构简图.图中O 为整个关节的旋转中心,杠杆机构的支点中心O L 与关节中心O 的距离为r ,将虚拟杆件OO L 作为关节运动的参考基座,刚度为K S 的扭转弹簧用于联接基座和杠杆机构.图3中杆OA 代表关节的机构力矩输出杆,其端点A 处与杠杆机构上的滑块铰接,滑块在杠杆上力臂长度为l ,该滑块作为杠杆的作用力输出单元,其在机构力矩输出杆OA 处产生的力矩与关节的负载T J 相平衡,OA 作为关节运动机构通过杠杆机构与弹簧连接,关节对外旋转输出刚度定义为K J .关节机构的受力可以集中通过滑块的受力进行分析,如图3右侧所示.其中F L 为滑块与杠杆的作用力,F R ⊥和F R ∥为杆OA 与滑块之间的作用力分解.该关节机构参数应满足条件:R >r R J>r +l l =√r 2+R 2−2rR cos θsin φ/R =sin θ/l (4)其中R J 为关节机构外形半径最小值.关节旋转角度与杠杆旋转角度具有对应关系,由式(4)得:φ=arcsin α2sin θ√1+α2−2αcos θ(5)式中α=R /r .机构中杠杆与关节的传动比关系只与各自的虚拟杆的长度比例有关,定义α为机构的杆长系数,该系数决定了关节组件的运动特性.r图3关节旋转力矩输出机构简图Fig.3Sketch of joint output mechanism机构初始位置下OA 与OO L 角度为θ0,此时杠杆机构角度为φ0,为方便分析,令φ0=π/2,根据式(5)可知θ0随机构中杆长系数变化,忽略机构中存在的摩擦,关节受力关系满足:T L =(φ0−φ)K S =F L l F R ⊥=F L cos (φ−θ)T J =θ θ0(θ0−θ)K J d θ=F R ⊥R K J =∂T J∂θ(6)T L 为杠杆机构对应的旋转力矩,结合约束条件式(4)~(6)则有:K =K J K S =∂(αcos (φ−θ)√1+α2+2αcos θ)∂θ(7)式(7)中K 为关节刚度与杠杆弹簧刚度的比例,定义为关节刚度系数,可以得到如图4(a)所示的关节刚度系数分布图,在不同杆长系数下,关节刚度系数与关节转角的关系如图4(b)所示.在特定关节转角大于30◦的时候,随着杆长系数的减小,关节刚度逐渐增大,当杆长系数大于2.9的时候,杆长系数对刚度调节的敏感度逐渐减弱.需要留意的是,在特定的杆长系数下,关节旋转刚度随着关节角θ的减小而增大.关节机构的杆长系数调节范围应选择刚度敏感的范围,关节的最第36卷第3期尹鹏,等:面向足式机器人的新型可调刚度柔性关节的设计及性能测试325大转角选择图4中大于30◦的范围会得到较好的调节效果,在关节设计中可将其运动空间设置在此范围内.3210123420406080㡖 ㋏ 㡖䭓㋏α㡖 䕀㾦 (θ0– θ) /(°)K (a)关节刚度系数分布图㡖 ㋏ K㡖 䕀㾦 (θ0 – θ) /(°)(b)不同杆长系数下刚度与关节角对应关系图4关节刚度系数与机构运动参数的对应关系Fig.4Relation between stiffness coefficient and joint’skinematic parameters3.2关节样机结构设计针对足式机器人设计的可调刚度柔性关节,其关节平衡位置的调整范围应满足机器人关节运动空间的要求;其柔性运动部分应采用单向运动输出形式,并在运动极限位置设置机械限位,以避免机器人腿在运动至腾空相时由于能量耗散不完全而产生的腿部抖动;设计关节时应避免为机器人弹跳运动增加过大的额外重量.关节分为关节刚性驱动、刚度调节以及柔性输出3个主要功能部分,由一系列安装在关节主轴上实现不同功能的盘体结构组成,通过2组驱动盘体的差动运动实现关节平衡位置和刚度输出特性的调节,关节的驱动力矩通过带弹簧负载的杠杆机构传递到负载输出端,机构模型如图5所示.其中2组盘体分别带有直线滑槽和曲线滑槽,分别标记为直线盘体和曲线盘体,曲线盘体通过滑动轴承安装在关节主轴上,其两侧分别安装直线盘体,通过键连接固定在关节主轴上保证2组直线盘体的同步运动.图5(b)中展示了3组杠杆机构中的一组传动结构,从中可以看出各个盘体的安装传动关系.盘体之间通过镶嵌减磨垫片组来降低运动中的摩擦.3个滑块分别位于各自盘体的滑槽中,串列排布在杠杆调节轴上,各滑块之间通过垫片隔开保证运动顺滑.偅(3㒘) 䇗㡖ㇻ(3㒘)剡ⱏ㒓偅 ⚍䕈(a)Ⳉ㒓Ⲭԧ 㒓Ⲭԧ ⚍䕈Ⳉ㒓Ⲭԧ ⺼ ⠛㒘 䇗㡖䕈(b)图5可调刚度关节结构3维模型Fig.53D model of the adjustable stiffness joint关节的柔性输出盘体部分与负载联接,其驱动输入端为杠杆机构,为提高关节空间利用率,其柔性环节由3组弹簧负载变传动比杠杆机构提供,其中杠杆机构的运动范围固定,因此在不同杆长系数下关节具有不同的柔性运动角度范围,在关节结构中3组杠杆通过机械限位结构来保证其初始位置和运动范围,(图5(a)左侧),并对弹跳中多余的能量进行必要的耗散,防止腾空相腿部由于能量未耗尽发生的抖动.杠杆的支点轴安装于关节输出结构上,对应于图3中虚拟杆OO L ,扭转弹簧两臂连接杠杆和输出结构.杠杆的滑块(对应于图3中A 处的结构)作为关节刚性驱动和刚度调节机构的输出端,位于杠杆调节轴的端部,为杠杆机构提供驱动力,如图5(b)所示.杠杆滑块的位置对应于图3326机器人2014年5月中虚拟杆OA ,杠杆支点轴与关节主轴的距离恒定,改变杠杆滑块位置则杆长系数会相应改变,其位置调节通过位于两差动盘体中的3组滑槽机构确定,如图6所示.在杠杆初始位置下,其直线滑槽方向与杠杆中滑槽方向一致,此时杠杆滑块调节方向与受力方向垂直,因此通过直线盘体和曲线盘体的差动运动调节杠杆调节轴的位置所需的能量最小,此外在曲线滑槽中通过保持较小升角能够进一步降低机构中的滑动摩擦.图6关节刚度调节盘组Fig.6Disk-set in stiffness adjustment mechanism在弹性元件的作用下维持机器人弹跳只需要驱动电机提供较小能量以补偿碰撞、摩擦引起的能量损失,但是电机驱动单元需要较大减速比以提供足够的保持力矩,造成驱动部分重量和体积的增加.对此采用鲍登线将电机驱动单元转移到关节外部,在一定程度上降低了关节的重量,其驱动结构如图7所示.⺜䍘 Ⳟ䫒э 㣟傡 ⭥图7基于鲍登线的关节驱动Fig.7Bowden-cable for joint actuation4关节运动性能分析(Analysis of joint kine-matic performance )关节输出刚度的调节通过刚度调节盘体与刚性驱动盘体之间的差动运动完成(图5),2组盘体由电机单元分别进行驱动.2组盘体的相对位置确定了杠杆机构中滑块与关节中心的距离,并对应于一条关节刚度输出曲线.4.1刚度调节机构运动分析刚性驱动盘组中的直线滑槽与刚度调节盘组中的曲线滑槽的交汇处为杠杆机构滑块的位置.假设初始状态下杠杆滑块位于图8(a)所示最近端,为方便计算将其始终固定于X 轴,杠杆滑块位置的调节呈现图8(a)至图8(c)的过程.(a)初始状态(b)中间状态(c)最终位置图8刚度调节盘组差动调节示意图Fig.8Sketch of the differential movement of the disk-setfor stiffness adjustment杠杆滑块与关节中心的距离在机构功能简图(图3)中对应于R .为方便计算,差动盘组相对转动角度可以视为盘组两部分相对各自初始位置转动角度的合成,如图8所示,对应角度关系如下:γ=β1+β2(8)其中曲线滑槽采用等速螺旋线,极坐标表示为ρ=10+21ω/π(ω∈[0,π])(9)杠杆滑块对应的极径为R 时:β1=π(R −10)/21(10)此时直线滑槽角度为β2=arccos (10/R )(11)关节差动转角与杠杆滑块位置的关系如图9所示,可以看出其转角和滑块位置的对应关系近似于线性关系,有利于进行刚度控制.━ ѝ 䐍R /mm1015202530050100150200250 㢲 䖜䀂 γ /(°)图9关节差动转角与杠杆滑块位置对应关系Fig.9Relation between joint differential angle and lever sliderposition4.2关节驱动力矩分析关节驱动力矩应能使关节弹簧达到满行程偏转,关节运动过程的驱动力矩可根据3.1节的推导进行理论计算.关节杠杆初始位置φ0=77◦,关节第36卷第3期尹鹏,等:面向足式机器人的新型可调刚度柔性关节的设计及性能测试327弹簧刚度约为1.6N ·m/rad .该柔性关节中包含有3组相同的杠杆机构,因此关节力矩输出为T J =3RF R ⊥(12)不同杆长系数下关节转角与所需电机驱动力矩之间关系如图10所示,关节驱动电机力矩应满足图中力矩输出的要求.7.564.531.5060504030201002 2.53 3.5⭥ 傡 ⸙ (N ·m )䮯㌫ α 㢲 䖜䀂 θ / ° 图10电机驱动力矩理论计算Fig.10Theoretical calculation of jointtorque5可调刚度关节样机系统及试验(Prototype system and testingof the joint with ad-justable stiffness )5.1关节样机及实验系统为满足足式机器人关节对体积和重量的要求,关节主要结构部件采用7075铝合金材料加工,关节各滑块结构采用青铜合金加工,并严格控制公差以降低运行摩擦,杠杆机构选用40Cr 高强度合金钢以满足强度要求,关节参数见表1.表1可调刚度关节参数Tab.1Parametersof theadjustable stiffnessjoint直径96mm厚度85mm质量0.58kg 输出扭矩>10N ·m 柔性角度范围0~60◦建立试验系统测试关节性能,关节刚性驱动以及刚度调整电机选用Maxon RE40直流伺服电机,搭配减速比为113的减速器,关节电机驱动单元被安置于试验台架上.输出转矩通过驱动转盘带动两对拮抗驱动的鲍登线,分别用于驱动关节的刚性驱动盘组和刚度调节盘组,如图11所示.关节测试系统中配备有一组电位计,用于测量关节刚性转角、关节合成转角、滑块移动位置,并通过力矩传感器检测关节的力矩输出.实验采用基于Matlab xPC Target 的硬件在环控制系统,关节传感器组测量的关节状态反馈通过数据采集卡输入至工控机中,工控机参照上位机控制模型,根据传感器状态反馈生成控制指令发送至电机驱动单元,由此对关节盘组的旋转角度进行闭环控制,从而实现关节平衡位置以及输出刚度的调整.测试系统采用PC 机作为上位机,在Matlab/Simulink 环境下建立关节控制系统模型,并通过与工控机的通讯实现关节状态的监测,其实验环境如图12所示.⬉ 剡ⱏ㒓偅 䕀Ⲭ图11关节实验测试平台Fig.11Test bed for joint experiment⬉ 偅 图12关节实验控制测量系统Fig.12Experiment and control system for joint testing5.2关节样机冲击实验在外界激励下,关节的振动频率与其旋转刚度有关.采用测量关节冲击响应的方式,通过测量关节从施加冲击载荷到恢复平稳的过程观察不同杠杆滑块位置下关节的旋转输出特性.由于关节工作方向设计为单向,其初始位置存在机械限位用于吸收关节回弹过程中未完全耗散的能量,因此为进行冲击试验,将关节侧向放置,在关节的输出杆的端部固定重物,一方面使关节偏离原初始平衡位置,消除实验中机械限位结构的影响,另一方面可以增加关节输出杆的转动惯量,延长关节响应时间,方便进行试验结果分析.实验采用锤击法快速敲击关节输出杆端部,为关节试验提供冲击载荷,然后移除锤头,使关节处于自由振荡状态.敲击实验的一组完整序列如图13所示.328机器人2014年5月(a)(b)(c)(d)(e)(f)图13关节冲击实验序列图Fig.13Snap shots of impact response experiment该关节在施加冲击载荷后,系统运动微分方程为I ¨θ(t )+c ˙θ(t )+K J θ(t )=P δ(t )(13)式中I 为系统的转动惯量,c 为系统的阻尼,P 为等效的冲击载荷幅值,单位和力矩的量纲相同.关节在自由振荡过程中其振动周期与冲击载荷无关,只和由关节旋转刚度决定的关节旋转固有频率有关,但敲击力度应限制在不会使关节回弹至机械限位位置的程度.关机的振荡固有频率为ωn =2πT=√J I(14)关节旋转刚度可以表示为关于关节振荡运动周期的函数:K J =I (2πT )2(15)关节振荡周期越小,关节的旋转输出刚度越大.关节冲击实验对比了在不同的杠杆滑块位置下关节转角在自由振荡中的时域特性,对应的转角关于时间的曲线如图14所示.在不同杆长系数下分别进行了多次敲击实验,图14中实线表示杆长系数α=2.83时的冲击响应曲线,虚线表示杆长系数α=2.25时关节的冲击响应曲线.可以看出,虽然在同一组实验中,由于几次敲击对关节施加的载荷不同,关节的运动幅度相应发生了改变,但关节运动振荡周期基本保持一致.在杆长系数α=2.25时关节振荡周期为T 1=0.73s ,杆长系数增大至α=2.83时,其关节振荡周期时间增加至T 2=0.89s .由于系统中存在较大阻尼,关节在经过几次振荡后恢复至平衡位置.由此可见,随着杆长系数的增大,其关节振荡周期也增大,并进一步推出关节刚度随着杆长系数的增加而减小.t /s㢲䖜䀂θ /(°)图14不同杆长系数下关节冲击响应曲线Fig.14Joint impact response curves under different levercoefficients5.3关节样机静态刚度辨识关节的静态刚度特性体现在关节在静态载荷条件下其输出力矩与位移的关系,将关节输出杆固定,刚度调节盘组和刚性驱动盘组同步运动,此时关节中杠杆滑块位置不变,辨识得到的关节输出力矩与关节转角的关系反映了在特定关节滑块中心位置下关节的静态刚度特性曲线.关节在测量过程中做单向匀速转动以消除角加速度引起的测量误差.关节静态刚度可通过式(16)计算得到.实验测量了3组刚度特性曲线,分别对应于不同的关节杆长系数值,如图15所示.204060802468101214α=2.2α=2.7α=3.3㢲 K J /(N ·m /r a d )㢲䖜䀂θ /(°)图15关节静态刚度辨识Fig.15Static stiffness identification of the jointK J =∂T J∂θ(16)关节的输出刚度随着转角的增大呈现逐渐增大的趋势,杆长系数接近2的时候,其刚度增大趋势更加明显.实验结果证明了关节方案的可行性,并与理论推导结果呈现一致的变化趋势.但由于机构中存在一定间隙,关节中杠杆滑块位置随着载荷的增加会朝着刚度降低的方向(具有能量耗散的趋势)发生偏移,因此实验测量与理论计算结果曲线存在一定的差异,通过后续机构改进滑块的偏移问题会得到改善.6结论(Conclusion )针对仿生足式机器人的行走适应性问题,对机第36卷第3期尹鹏,等:面向足式机器人的新型可调刚度柔性关节的设计及性能测试329器人的关节在功能上进行了仿生设计.为足式机器人设计一款可调刚度柔性旋转关节,通过调整关节的输出刚度来改变运动中的腿部刚度,进而增强机器人在不同运动状态下的运动效能,提高运动适应性.本文基于对杠杆机构刚度输出特性的分析,提出以可调传动比杠杆机构为核心,对仿生机器人关节进行综合设计.通过进行刚度输出特性分析得到了该关节机构方案的刚度调整敏感参数范围,进而确定了关节机构的相关参数.为方便实现机器人的跑跳运动,对机器人关节进行了小型化轻量化设计,并通过驱动电机外置的方式有效地降低了关节处重量,减小了仿生机器人腿部的转动惯量,提高了机器人腿部运动性能.文中搭建了硬件在环路实验系统对可调刚度柔性关节进行了综合测试,通过实验验证了关节机构设计的合理性以及刚度调节的有效性.后续工作将围绕可调刚度柔性关节在足式机器人腿部结构中的应用展开,包括进一步研究关节刚度特性在线动态辨识方法以及关节刚度在线闭环调整控制策略,另一方面针对足式机器人动态行走,开展基于可调刚度柔性关节的行走控制方法研究,提高仿生机器人的运动适应能力.参考文献(References)[1]Blickhan R.The spring-mass model for running and hopping[J].Journal of Biomechanics,1989,22(11/12):1217-1227.[2]Blickhan R,Seyfarth A,Geyer H,et al.Intelligence by me-chanics[J].Philosophical Transactions of the Royal Society,A:Mathematical,Physical and Engineering Sciences,2007,365(1850):199-220.[3]Hutter M,Remy C D,Hoepflinger M A,et al.High compliantseries elastic actuation for the robotic leg scarleth[C]//14th In-ternational Conference on Climbing and Walking Robots andthe Support Technologies for Mobile Machines.Singapore:World Scientific Publishing,2012:507-514.[4]Seyfarth A,Iida F,Tausch R,et al.Towards bipedal jogging asa natural result of optimizing walking speed for passively com-pliant three-segmented legs[J].International Journal of RoboticsResearch,2009,28(2):257-265.[5]李哲,苏兴旺,阎宏伟,等.气动弹跳腿垂直方向稳定跳跃研究[J].机器人,2013,35(3):306-312.Li Z,Su X W,Yan H W,et al.Stable hopping of a pneumat-ically actuated leg in vertical direction[J].Robot,2013,35(3):306-312.[6]Hobara H,Inoue K,Muraoka T,et al.Leg stiffness adjustmentfor a range of hopping frequencies in humans[J].Journal ofBiomechanics,2010,43(3):506-511.[7]Ferris D P,Louie M,Farley C T.Running in the real world:Ad-justing leg stiffness for different surfaces[J].Proceedings of theRoyal Society,B:Biological Sciences,1998,265(1400):989-994.[8]Arampatzis A,Bruggemann G P,Metzler V.The effect of speedon leg stiffness and joint kinetics in human running[J].Journalof Biomechanics,1999,32(12):1349-1353.[9]Riese S,Seyfarth A.Stance leg control:Variation of leg param-eters supports stable hopping[J].Bioinspiration&Biomimetics,2012,7(1):016006.[10]Galloway K C,Clark J E,Koditschek D E.Variable stiffnesslegs for robust,efficient,and stable dynamic running[J].Journalof Mechanisms and Robotics,2013,5(1):011009.[11]Hurst J W,Rizzi A A.Series compliance for an efficient runninggait[J].IEEE Robotics&Automation Magazine,2008,15(3):42-51.[12]van Ham R,Vanderborght B,van Damme M,et al.MACCEPA,the mechanically adjustable compliance and controllable equi-librium position actuator:Design and implementation in a bipedrobot[J].Robotics and Autonomous Systems,2007,55(10):761-768.[13]Wolf S,Hirzinger G.A new variable stiffness design:Matchingrequirements of the next robot generation[C]//IEEE Internation-al Conference on Robotics and Automation.Piscataway,USA:IEEE,2008:1741-1746.[14]Jafari A,Tsagarakis N G,Vanderborght B,et al.A novel actua-tor with adjustable stiffness(AwAS)[C]//IEEE/RSJ Internation-al Conference on Intelligent Robots and Systems.Piscataway,USA:IEEE,2010:4201-4206.[15]Tonietti G,Schiavi R,Bicchi A.Design and control of a vari-able stiffness actuator for safe and fast physical human/robotinteraction[C]//IEEE International Conference on Robotics andAutomation.Piscataway,USA:IEEE,2005:526-531.[16]Koganezawa K,Nakazawa T,Inaba T.Antagonistic control ofmulti-DOF joint by using the actuator with non-linear elastici-ty[C]//IEEE International Conference on Robotics and Automa-tion.Piscataway,USA:IEEE,2006:2201-2207.[17]马洪文,赵朋,王立权,等.刚度和等效质量对SEA能量放大特性的影响[J].机器人,2012,34(3):275-281.Ma H W,Zhao P,Wang L Q,et al.Effect of stiffness and equiv-alent mass on energy amplification characteristics of SEA[J].Robot,2012,34(3):275-281.[18]Braun D J,Petit F,Huber F,et al.Robots driven by compliantactuators:Optimal control under actuation constraints[J].IEEETransactions on Robotics,2013,29(5):1085-1101.作者简介:尹鹏(1985–),男,博士生.研究领域:仿生机器人,仿生控制.李满天(1974–),男,博士,副教授.研究领域:仿生机器人,特种机器人等.郭伟(1965–),女,博士,副教授.研究领域:仿生机器人,仿生机理.。
基于柔性膝关节的外骨骼设计与动力学研究
作为设计基准。膝关节是人体最重要的关节之一,
中央处理器分析处理,控制驱动器为使用者提供助 力,可实现自主行走及上下楼梯等行为。国内上海 傅利叶公司研发的 Fourier X1 外骨骼运用多模态信息 融合技术,对穿戴者运动状态进行实时监测,可动 态调节运动步态;燕山大学研发的坐卧式下肢康复 机器人已经在中国康复研究中心试运行,经过临床 实践,验证了方案的可行性[6]。
美国和日本在外骨骼研发领域起步较早。美国 加州大学开发的一代机 BLEEX 外骨骼[2],以及在其 基础上开发的 Exoclimber 外骨骼与 HULC[3]外骨骼主 要用于军事作战领域,士兵穿戴后可携带更多的装 备,大大提升了作战效率;日本筑波大学研发的 HAL-3[4]与 HAL-5[5]外骨骼采集人体肌电信号,传至
缓冲模式下当穿戴者有跌倒的趋势时膝关节角速度会骤变控制系统检测到信号控制电磁制动器断电与传动轴结合传动轴带动制动器连接盘转动并压缩弹簧弹簧被压缩产生弹力反作用于制动器连接盘再通过传动轴传递到小腿构件抵消部分冲击力当弹簧压缩到一定程度将不能再压缩起到限位作用防止穿戴者关节过度转动对穿戴者造成伤害
84
文章编号:1004-2539(2019)12-0084-05
机械传动
2019 年
DOI:10. 16578/j. issn. 1004. 2539. 2019. 12. 015
基于柔性膝关节的外骨骼设计与动力学研究
乔学昱 赵彦峻 厉 朝 贾丙琪 陈 淼
(山东理工大学 机械工程学院, 山东 淄博 255049)
摘要 为了兼顾外骨骼动力的线性输出与穿戴过程的安全性,设计了一款包含助力与缓冲两种 工作模式的下肢外骨骼。首先,对外骨骼膝关节缓冲器及整机模型进行了参数计算与结构设计;然 后,对其做动力学分析并通过 Matlab 计算得到关节理论力矩;将计算所得参数与理论力矩分别代入 Adams,对两种工作模式下的外骨骼进行仿真试验;通过对比仿真结果与人体运动标准数据,证明 外骨骼助力模式可基本满足穿戴者正常行走需要,缓冲模式可在突发状况下缓冲刚性冲击。研究结 果为后期系统的控制与模型制造提供了重要的理论依据。
变刚度柔性机器人关节的设计与解耦控制方法

变刚度柔性机器人关节的设计与解耦控制方法张明;房立金;孙凤;孙兴伟【摘要】设计一种采用永磁变刚度装置的绳索驱动式柔性机器人关节,在不增加驱动力的情况下,增加关节刚度调整范围.详细阐述关节的机械结构和变刚度原理.利用雅可比矩阵和模型间静力学关系,得到关节刚度,位置和绳索伸长量的对应关系,实现了刚度与位置解耦.建立变刚度关节的动力学模型,以轨迹控制为目标,设计解耦控制器,搭建实验系统,验证本方案的可行性.采用永磁弹簧,绳索驱动的柔性关节可以有效的减小关节的质量,惯性和体积,同时具有较大的刚度调整范围以及较短的调整时间,较快的响应速度和较小超调量.此柔性关节的构型和控制方式也适用于多自由度柔性并联机器人关节的构建.【期刊名称】《电机与控制学报》【年(卷),期】2019(023)007【总页数】9页(P120-128)【关键词】变刚度;磁弹簧;绳索驱动;解耦控制器;柔性关节【作者】张明;房立金;孙凤;孙兴伟【作者单位】东北大学机械工程与自动化学院,沈阳110819;东北大学机器人科学与工程学院,沈阳110169;沈阳工业大学机械工程学院,沈阳110870;沈阳工业大学机械工程学院,沈阳110870【正文语种】中文【中图分类】TP240 引言柔性变刚度机器人关节是不同于传统刚性机器人关节的一类刚度可调的柔性机器人关节,由于自身刚度可调,可以很大程度的提高人机安全性和环境适应性,已经成为未来机器人发展的重要方向[1-9]。
国内外学者在柔性变刚度机器人关节方面已开展了大量的研究和探索,提出了很多的方案和设计。
其中主要有:意大利技术研究所(IIT)基于一种弹簧组合设计了一种紧凑的柔性驱动单元AWAS-Ⅰ及改进版AWAS-Ⅱ[3-4],工作原理是通过改变弹簧在杠杆臂上的位置改变刚度,通过控制杠杆臂的转角实现操作臂的位置控制;德国宇航局的Sebastian Wolf等人提出基于可调预紧力进而改变机器人刚度的关节VS-Joint和基于能量观点的FSJ[5-6];加拿大卡尔顿大学的Chad English等人,首先提出另外一种绳索驱动变刚度机器人[7],工作原理是关节两侧布置非线性弹簧,通过两个电机运动,改变弹簧的伸缩量来调节关节位置和刚度,构成一种拮抗式变刚度结构,这种形式与人类骨骼肌控制关节刚度与位置形式最接近。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
柔性关节设计
摘要柔性关节技术是一种先进的机器人关节机械臂结构,由于其“柔”的特性使得其相对于刚性关节具有更加安全、局限性更小、能量利用率更高的特点。
这也是如今各个国家及研究所大力研究机器人柔性关节的重要意义。
本文主要以柔性关节为研究对象,以变更刚度为目标,对各种可以变更刚度的柔性关节技术进行系统性分析。
关键词机器人;机械臂;柔性关节;可变更刚度
前言
随着当前科学技术的发展,机器人领域中迫切需要一种在人类工作环境中服务于人类的更加“温柔”的对人类不会造成伤害的具有环境友好性的机器人。
而这种机器人的实现需要一个必要条件,就是实现其关节柔性。
1 背景
关节类型机器人由于其灵活的活动性能、较大的活动空间等特点广泛的在工业、医疗等等各个领域内应用。
传统刚性关节设计在其运动速度、精度等方面已经达到里比较高的水平,但是随着机器人的普及,刚性关节已经不能满足人们对技术的要求;工作在一些障碍物较多的未知的环境中,刚性关节常常因为碰撞到障碍物最终导致损坏和缺失;在承担危险救援工作的时候,刚性机器人难免会对被救人员造成二次伤害,刚性机器人装上再多的传感器,安全系数也达不到人们的要求[1]。
为了改变这种现状,人们发现大自然中的动物和人类的关节表现出了很是出色的一些运动的特性,快速响应的能力、大力矩输出能力以及良好的柔顺特性。
人们通过对动物关节原理的研究和分析,柔性关节技术应运而生。
2 动物柔性关节原理研究及分析
人体的膝关节上连股骨下接胫骨,它是人体结构最复杂而且是最大的关节,人类的很多动作都要靠它来完成。
膝关节的动力由股四头肌提供,靠股四头肌收缩完成大小腿屈伸及站立动作,股四头肌通过肌腱和韧带与胫骨连接,通过韧带、肌腱牵引胫骨转动。
肌腱具有极强的黏性,在受到快速的拉伸时可以产生非常大的弹力,肌腱的串联弹性能让肌肉运动时刻处于最佳范围之内,跳跃、奔跑中,关节的肌腱和韧带可以为动物储能和释放能量,也称为弹性储能单元。
主要作用有能量储存、柔性缓冲以及能量放大。
仿照动物的关节组织,在机器人关节驱动元件与被驱动元件之间串联弹性元件,就构成了串联弹性驱动器(series elastic actuator,SEA),这种驱动器把关节柔性、抗冲击性、能量储存释放等机理引入,降低了外力的冲击,减少能耗,还
降低了精度要求[2]。
3 柔性关节设计分析
3.1 柔性关节发展背景
20世纪末,各个国家就开始对柔性关节的研究,最早由麻省理工开始,其弹性驱动技术如今已经得到广泛的应用。
研究人员已经设计出了多种可变更刚度关节机构方案。
Sensinger采用谐波齿轮减速器设计了一种特别的旋转型无回差机构,可以消除间隙而且对小扭矩的输出没有任何回弹,但其缺点是力矩解析度不能被用来进行低扭矩控制;Sugar 用并连机构实现其关节柔性;Kolacinski的V型线性弹簧机构具有优良的储能效果;Sulzer把绳子与轮系结合,设计了一个轻量型柔性关节。
这些关节大都在旋转机构中加入弹簧、阻尼结构以实现关节柔性。
3.2 可变更刚度设计
以上种种传统方法,有其一定的局限性。
这种关节对于精确位置控制技术难以实现,且能力率较低,柔性单一不可更改,局限较大。
由此基础,各国科学家设计发明了可变更刚度的柔性关节。
既能够实现机械关节的柔性,又可以随需求调节刚度,很大程度上确保了机器人的安全性,又大大提高了能量利用效率。
这种设计也能把重力势能和动能等能量储存,在关节运动的下一环节释放,减少能量输出,提高运行效率。
3.3 可变更刚度设计实例
国外对可变更刚度关节研究较早,到目前已经取得一定成果,德国航空航天中心的研究成果最为出色。
他们最先运用可变更刚度的柔性关节做成了机器人系统,叫Justin机器人。
早期加入力矩传感器,结合关节力矩及位置信息控制,使能量得以储存再利用,同时也减轻了震荡,手臂系统控制采用阻抗控制,每条手臂肩、肘部都采用可變更刚度的柔性关节技术,且用19个弹簧来实现手上的关节柔性,整体形成一个可变更刚度的柔性关节系统机械臂。
3.4 仿生柔性关节机械臂
通过对动物关节的研究和分析,根据仿生学原理,郭龙提出了一种轻巧而且可变更刚度范围较大的柔性关节,其输出刚度可通过调整机构调节,可使刚度连续变换,能够运用它来搭建仿生机械关节臂。
使用弹簧片悬臂梁结构来达到扭转刚度的目的,他们所设计的关节结构紧凑,在体积小,重量小的条件下刚度变化范围较大,连接方便且可重叠性强[3]。
4 结束语
可变更刚度的柔性关节既能有效减少在刚性关节驱动碰撞时带来的损坏,又可以将能量储存,合理优化机械能量利用效率,同时,其柔性使得机械关节在与人类协同工作时更加安全可靠,在日益发展的社会中必然将会大放异彩,得到广泛的应用。
参考文献
[1] 史延雷.一种旋转型机器人柔性关节设计与分析[D].天津:河北工业大学,2016.
[2] 郭龙.机器人可变刚度柔性关节设计分析与实验研究[D].武汉:武汉科技大学,2015.
[3] 陈宵燕.柔性臂机器人控制关键技术的研究进展[J].机械设计与研究,2015,(1):22-26,30.。