PMAC运动控制系统
PMAC可编程多轴控制器简介

PMAC 可编程多轴控制器简介PMAC 是可编程多轴控制器(Programmable Multi-Axis Controller)的简称,是美国Delta Tau 公司生产的功能强大的运动控制器,PMAC 是目前世界上功能最强的运动控制器之一,是当前开放式数控系统控制器的突出代表。
图3.3为PMAC 的硬件原理和接口图[22]。
PMAC 是一台具有独立内存、独立运算操作能力的计算机[23],它采用Motorola 的DSP56001作为CPU ,它可以通过存储在自己内部的程序进行单独的操作;它还是一台实时的、多任务的计算机,能自动对任务进行优先等级判别,先执行优先级高的任务。
PMAC 既可以独立工作亦可按主机的命令进行工作,它和主机的通讯可以通过串行口也可以通过总线进行,通过总线通讯时,还可以将中断信号引入主机,从而实现非常灵活有效的控制系统。
PMAC 最多可以控制8个轴同时运动,在对伺服数据的处理能力、轴特性及输入信号带宽方面,PMAC 控制器由于采用专门的模块化结构,编码输入的串行处理速度是大多数控制器的10到15倍,SUBAT(Servo Update/Block/Algorithm Term 伺服更新率/块执行速率/伺服算法的项数)是非DSP 控制器的几十倍;它还可从高分辨率编码器件接收低插补位的5位并行数据;可得到320MHz 的有效输入带宽;其DAC 输出分辨率高达16/18位;PMAC 在实际的运动之前,先进行预运算,将不同的运动轨迹按某种模式(如:PMAC 具有内置PLC ,可以在后台同时运行32个异步PLC 程序,同时PMAC 提供了非专用的数字输入/输出口,利用这些I/O 口可以完成机床的逻辑控制,控制面板的操作、位置反馈、手轮及主轴的操作等。
变频器在印染设备多电机同步调速中的应用发表于 2007-7-1 18:56:58 变频器在印染设备多电机同步调速中的应用摘要: 本文概述了变频器在印染设备多电机同步调速中的应用,从通用变频器到伺服变频器,包括有松紧架和无松紧架以及卷绕驱动。
PMAC卡简介
1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
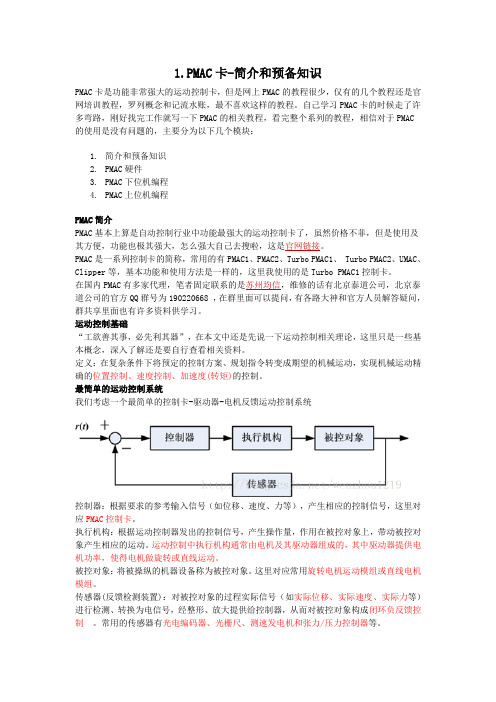
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
PMAC多轴运动控制卡学习(硬件)
目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (7)2.2.2.3 数字I/O接口板 (7)第三章 Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (8)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
基于PMAC的运动控制系统的研究

签字日 期: 20 07年 6月 1 2日
学位论文作者毕业后去向:
工作单位:
业大学硕十学位论文 1 :
1 绪论
1 引言 . 1
机电一体化 mcaois打破了传统的机械工程、电子工程、建筑工程、信 (ehhnc) 息工程、控制工程等旧模块的划分,它是微电子技术向传统机械工程渗透而形成的
融合机械工程、电 气工程、计算机科学、信息技术等为一体的新兴的交义学科。而 到了 2 0世纪 9 0年代后期,机电一体化的概念又发生了重大而深刻的变化,智能控 制技术和网络技术与机电一体化的结合,使机电一体化进入了深入发展时期。
机电一体化技术主要有以下五大关键组成部分: 1精密机械技术— 机电一体化技术的基础,主要涉及机械整体的设计及制造 )
Te e a w r tcr s g喊 h c r a ot o I i no c hr a su u ids n Te tl r m PD ir ue hst y m d e te e s r i o o l i f s d 斌 n g h t ad a ica crt s u k s t ise e, f cos oo c tl n dnmc r tii i l o y e s s dTe tn o m tn r y h a esc n f m t s h u i f i o o m s r n n r l m au m nad c s l p tl le. s t iue ito xs e t e sr et fl e o cnoa r idTe e s n ae ai e e m n u l d or r e z h y m s w lo o e a s d - e em n l o wtft os h h i ngost a d a i eo a e x r ea l r i a rpn , p ci , tc y mc r n . p i tp t m h e e i r s od n n p fm c a f s s g e o a d i r Te ci au c rg b e wt t a u nes h e h g e , n m nf t i cm i d h f tl d i t t ci p cs h m h e a un o n i h c a e n a n r s a e e o Mae bsot oe a heu ca crtsape tc rot nw d ot k t e f pn ic r hr tii, i o y t e m e h h t e r t te a esc pld a u h e h c r e o f e tcn. s t if f sd om d sv c tlo lotl C r li e h gTe e s o t y oe e oor , - n , ieo tn a i h y m i r f m - no lac r N n p ao s t u r c o t ad ac m nf teIivr lu f upram n g da s d tw o n avne a au . e h p l pe ls e ad ut t e s d d u c r t y e f o s r cs nr a e n h u
PMAC运动控制系统

5.1 开放式运动控制系统
5.1.1 开放式数控系统 1、传统数控系统
一般数控系统由3部分 组成:
1,MMC:人机接口 2,CNC:运动控制部
分,
包括伺服部分,但一般
主轴在PLC部分。 3,PLC:机床的顺控部
分
人机接口 MMC PLC
NC控制器
伺服驱动器
CNC
传感器
机床强电
数控机床
数控系统软件功能模块
✓ PC连接型NC 即将现有原型CNC与PC用通用串行线直接相连的一
种组成形式:DNC ✓ PC嵌入型NC 即在传统的专用数控机床中嵌入PC技术,PC与CNC
之间用专用总线连接。 -840系统。 ✓ 运动控制器+PC型 即在通用PC的扩展槽中插入运动控制卡,完全采用
以PC为硬件平台的数控系统。-PMAC运动控制器 ✓ 全软件型NC 即完全采用PC的全软件形式的数控系统。NC的全部
运 13. 通用自动化---输运带/同步
控制
3)PMAC 的典型开放式应用
A B C
Amplifier
A BC
interface
功率 放大
Motor
Enc. Halls
Machine I/O
工业现 场总线
PMAC
驱动受控 机械对象
Software Interface
4)PMAC 的应用系统建立
硬件
数控装置
管理模块
控制模块
电位插刀误速G 监中P
机置补补差度功控断L
运运计计补处能处处C
动动算算偿理处理理处
控控
理
理
制制
5.2 PMAC运动控制器
PMAC-Programmable
基于PMAC的大惯量转台运动控制系统研究

④ 支持多种高 级语 言,用r 可以使用 V 、V 、C 1 B C H 等 爵 言 在 Wi hw m Js平 台 I编 写 用 户 专 用 界 而 ; 罾 P C提 : MA
收氇 日期 :2 — 1 一3 ∞6 O
电机 2 里碱建器 3 向机 T 方
4回转托 槊 5回转支撑
维普资讯
试验 结 表嘲 系 统艰 好地摘 足了转台 寅町运 动控制的 要求 点 转 台;运动 拄徊 系统
中围分 类号 :T 7 M5 1 文献标 识码 :A 立章 蟪号 :10 9 9 2 0 10 — 0 8 ( o 4 言
一
供 r 含 建 度 l 速 度 前馈 的 PD 控 制 和 阶 式 滤 放 器 , 电 包 力 口 I
设 计 中 最 为 芫键 的 部 丹 。 本 文 介 绍 了 一 种 基 于 P C 的 大 MA
bO点 都由软件来控 制,只要 使用指针 变量 指向某一 IO ' /
地 址 .就 町 “ 方 便 地 通 过 该 指 针 变 量 对 该 I0 点 进 行 输 人 / 或 输 控 制 。
惯 醚转 青运 动控 制系统的埂汁 .并进行 了宴物 试驻,试验
字 IO扩 展 卡 ,用 于 接 受 并行 码盘 的 数 据 并 反 馈 给 P C / MA , AC8 C 一 P为 模 拟 量 连 接 扩 展 卡 ,用 于 连 接 伺 服 驱 动 器 ,输 出模 拟 转 速 信 号 并将 电机 轴 码 盘 的 A、B、Z脉 冲信 号反 馈 给P C MA 。伺 服 电 机 选 用 永 磁 同 步 交 流 伺 服 电机 ,电 机 轴 安 装 有 20 5 0线 的 增 量 光 电 编 码 器 ;伺 服 驱 动 器 选 用 桂 林 星 辰 电 力 电 子有 限公 司开 发 的 N S交 流 伺 服 系 统 。 伺 服 控 A
PMAC运动控制系统

编程语言与开发环境
编程语言
PMAC运动控制系统支持多种编程语 言,如C、C、Python等,方便用户 根据项目需求选择合适的编程语言进 行开发。
开发环境
PMAC提供完整的集成开发环境(IDE ),包括代码编辑器、编译器、调试 器等,方便用户进行软件开发和调试 。
运动控制算法
控制器通常采用高性能的微处理器或专用集成电路(ASIC),具有高速运 算和控制能力。
控制器可以实现多轴联动控制,支持多种运动模式和轨迹规划,满足复杂 运动控制需求。
伺服驱动器
伺服驱动器是连接控制器和 伺服电机的桥梁,负责接收 控制器的控制信号,并将其 转换为适合伺服电机运行的
电压或电流信号。
伺服驱动器具有过载保护、 速度控制、转矩控制等功能 ,能够确保伺服电机在各种
PMAC运动控制系统的应用案例
数控机床的改造
数控机床是现代制造业的重要设备, 通过改造数控机床,使用PMAC运动 控制系统,可以提高加工精度、加工 效率和加工质量。
PMAC运动控制系统能够实现高精度 的位置控制和速度控制,同时具有强 大的编程和调试功能,可以根据不同 的加工需求进行定制化配置。
自动化生产线控制
自动化生产线
用于控制生产线的传送带、机械臂等设备的 运动,实现自动化生产。
机器人
用于控制机器人的关节运动,实现机器人的 精确轨迹跟踪和动作控制。
激光加工
用于控制激光切割、焊接和打标设备的运动 ,实现高精度的激光加工。
PMAC的发展历程
1980年代
PMAC的原型问世,主要用于高 精度机床的控制。
1990年代
工况下的稳定运行。
伺服驱动器还具有多种反馈 接口,可以与传感器配合使 用,实现高精度的位置和速 度控制。
基于PMAC的运动控制系统在微细电火花成形加工数控系统中的应用
A p lc to f M o i n Co t o y t m a e n PM AC o m e i a n r lo p ia i n o to n r lS se b s d o f r Nu rc lCo t o f
M i r e S n n e t ia ic a g a h n n c o Di — i ki g Elc rc lD s h r e M c i i g
Li a h n, a g Su, n, e u Hu z e Lin Gu Li Ch n Che gx , ng Ka n i Ya i
(S a g a io To g Unv ri S a g a 2 0 4 Chn h n h i a n iest h n h i 0 2 0, ia) J y,
设 计 ・ 究 研
《 电加工与模具》 0 1 21 年第 4 期
基于 P MAC的运 动 控 制 系统在 微 细 电火 花
成 形加 工数 控 系统 中的应 用
刘华珍 , 梁 速 , 顾 琳 , 陈成 细 , 杨 凯
(上海 交通 大 学机 械与 动力 工程 学 院机 械 系统 与振 动 国家 重点 实验 室 , 上海 2 0 4 0 2 0)
Ab t a t o h r c e so AC r n r du e s r c :S mec a a t r fPM a ei to c d.Ba e n PM AC,t o t r n r wa e sdo hes fwa ea d ha d r a c ie t r fnu rc lc nto o ir i ki r h t c u eo me ia o r lf rm c o sn ng— di e EDM r o t u td.The e fc s o to a e c nsr c e fe t fmo in c nto a e n PM AC n o r lb s d o o EDM o e sng a e d s u s d.Th p i l r m e e so y t m e v n pr c s i r ic s e e o tma a t r fs se s r o a d pa ma hi n c ni g moto r e e t d.Ex e i n s s o t a to on r ls se b s d o i n a e pr s n e p rme t h w h t mo i n c to y t m a e n PM AC a hs sg fc nta v ntg st mpr v c i ng s a iiy a fiin y. i niia d a a e o i o e ma h ni t b lt nd efce c Ke r s:mo i n c n r lEDM ; ume ia o t o y t m ; y wo d to o t o ; n rc Ic n r Is se PM AC
PMAC多轴运动控制器研究

PMAC多轴运动控制器研究随着工业自动化的快速发展,多轴运动控制器在各种工业应用中的重要性日益凸显。
在这种背景下,PMAC(Programmable Multi-Axis Controller)多轴运动控制器作为一种先进的控制解决方案,引起了广泛。
本文将详细介绍PMAC多轴运动控制器的原理、设计及其实验结果,并探讨其未来研究方向和应用前景。
多轴运动控制器是指能够同时控制多个轴运动的控制器。
在工业自动化领域,多轴运动控制器广泛应用于机器人、数控机床、印刷机等设备。
PMAC多轴运动控制器作为一种可编程控制器,具有高度的灵活性和通用性。
它允许多个轴的运动控制相互独立,同时又协调一致,以实现复杂的运动轨迹和精确的位置控制。
PMAC多轴运动控制器采用基于PC的开放式体系结构,通过高速光纤总线实现与PC的高速数据传输。
控制器硬件由多个轴控制器模块和I/O模块组成,每个轴控制器模块可独立控制一个轴,I/O模块则用于输入输出信号的处理。
PMAC多轴运动控制器的核心是运动控制算法。
算法采用基于矢量控制的方法,通过实时计算速度和位置误差,实现对电机的精确控制。
PMAC还支持多种编程语言,如C++、和Python,方便用户根据具体应用进行软件开发。
为了验证PMAC多轴运动控制器的性能,我们进行了一系列实验。
在实验中,我们将PMAC控制器应用于一台五轴数控机床,通过控制五个电机的运动,实现了对工件的精确切割。
实验结果表明,PMAC控制器在位置控制和速度控制方面都具有很高的精度和稳定性。
我们还对比了PMAC控制器和其他多轴运动控制器的性能。
对比结果表明,PMAC控制器在动态性能、稳态精度和抗干扰能力等方面都具有显著优势。
这主要得益于PMAC控制器的开放式体系结构、高速数据传输和先进的运动控制算法。
本文对PMAC多轴运动控制器进行了详细研究。
通过介绍PMAC控制器的原理、设计和实验结果,我们证明了PMAC作为一种先进的可编程多轴运动控制器,在工业自动化领域具有广泛的应用前景。
PMAC多轴运动控制器研究
兰州理工大学硕士学位论文
die, oo ad esr U ig e hrceitc f fwr ad rvr m tr n sno. n t caatrsi o s tae n s h o hrwr , i st fr e ei l nto , m k i rn ra l a dae t e u o t s ca f c in o e u n m ly i s p h p u t a t o M l ia i to cn r le gv s h ge t uc in f dutn u t-x s o in oto lr ie te r a fnto o a jsig m
李丙才摘要传统的轴联动控制通过对多轴运动控制器研究将控制单元与微型计算机构成组合系统由一台微型计算机来统一控制多个控制单元继而控制相应的运动轴实现多轴联动的控制使不同电机之间的运动控制有机协调起来最终目的是达到系统整体的全局性能的最优化
实用价值。
关键词: MC PA 多轴运动控制器
开放式数控系统
运动程序和PC L 程序
同步运行 PD I 参数调节
兰州理工大学硕士学位论文
T e b et t e se t to : e sa c o te h s jc o h d sr a in T r er h h u f i h e f
PA m l ia i m to cnr le i n o t o l r M C u t - x s o
G a u t su e t in a g e r d a e dn :T a X n k t i Ttr L B n c i uo : ig a i
Ab ta t sr c
prmtr D bt cnt ag isl wt te ain agn aaee I, i a' c ne ef h s to c nig P u t h t i h t h
pmac中各电机的同步
pmac中各电机的同步
PMAC(Programmable Multi-Axis Controller)可编程多轴控制器是一种数控系统,用于控制多轴运动。
在PMAC中,多个电机可以通过控制器实现同步运动,以保证运动的准确性和一致性。
要实现电机之间的同步,PMAC采用了多种技术手段。
首先,控制器内部有一个高性能的处理器,可以快速地计算和传输指令,从而确保电机之间的同步精度。
其次,PMAC还提供了一些特殊的同步功能,如电子齿轮、电子凸轮等,可以根据需要调整电机的运动轨迹和速度,以保证同步精度。
在实际应用中,为了实现电机之间的同步,需要进行一些参数设置和调整。
例如,需要设置电机的运动速度、加速度、减速比等参数,以及选择适当的电子齿轮和电子凸轮等同步功能。
此外,还需要进行系统的调试和校准,以确保电机的运动轨迹、速度和位置等参数的准确性。
总之,PMAC中的电机同步技术可以有效地保证多轴运动的准确性和一致性,从而提高了数控系统的精度和加工效率。
PMAC在目标模拟运动支架控制系统中的应用

e b if .T s p e v s g e t e : s n t e d v l p d r l e y hi ap rgie r a ml I es o h e e o me t o e h n f s t m o t r n h t o fs vn i e h lg i cut . s y e sf wa a d t e me h d o olig ma n t c noo y d f l e i y K y r e wo d:op ig enn NC s t m s y e i a o m ̄ f n mo i n t sl i t r t o e e . PMA C. c n r l y t m o t r e o t s s e o f a g t
△ UNf 1 05( ( + C( )M .斗1 .。 N) E N), E
寰 1 ● 改臂的横■控■规一寰 I
寰 2
规 则 修 正 : 设 第 k 成 立 度 不 为 零 的 , …,)对应的规 则输 出量分别为 (r 1 ’ n 。第 k 1 =2 s= , …,) =2 - 步时 ,规则修 正后的输 出量 是 U, 。则输 出控 制量△ u的修 正值 为 △ 而每条非零成立度规则输 出量的修正值为A 。 = , n, u ( = …, 利 r1 )
田 3 绐定流■与反馈漉■关系 曲l 蔓
文章编号 : 1 7 -0 1(0 6 3 5 - 3 1 1 4 2 0 )0 -7 0 6
P C在 目标模拟运动支架控制 系统 中的应用 MA
孙 晶 华
( 大连 交通大 学 软 件学 院 ,大 连 1 6 5 ) 1 0 2
摘要 :介绍了基于 P C 目 MA 标模拟运动支架控制系统的设计与开发,简单介 绍了系统的硬件组成.重 点讲述 了系统软件的开发和主要技术难点的解决方
基于PMAC的仿形运动控制系统的研究
d ae fr t no teojc po l cre n e o u i t w t P A yPo m3 i i i t i oma o fh bet rfe uv a dt ncmm nc e i M C b rm 2wt V s n sn i i I h a h h .
适 应性强 。
1 系统 的硬 件 构 成
本 仿 形 运 动 控 制 系 统 的 运 动 控 制 器 选 用 的 是
P C A P 14板 卡 。该板 卡 可 同 时控 制 四 轴联 动 , MA 2 / C 0 采 用 串行 通信 R 2 2方 式与 P S3 C机 进 行通 讯 。伺 服驱 动 器采用 日立 公 司的 A A D 2—0 N C 2 S P型交 流伺 服 驱
中很 难 以某一 曲线 函数确定 其加 工轨迹 。而 运用 机器 视觉 技术 与 P C相 结合 搭 建 仿 形运 动控 制 系 统 则 MA 可方 便快 捷地解 决这 一 问题 。
P C是 由美 国 D l u公 司开发 的开放 式可 编 MA e at t a
及 P C仿 形加 工样 条 曲线 拟 合 的原 理 及 实现 方 法 。 MA 此 仿形运 动控 制 系统结构 简单 易实现 , 操作 方法灵 活 ,
程 多轴运 动 控 制 器 。作 为一 种 具 有 广泛 用途 的 控 制
器 ,MA P C能应 用 于 多 种 设 备 中 。它 通 过一 个 功 能 强
基于PMAC的数控系统运动控制参数调节技术
摘 要 : 中基 于微 细 电火花加 工 系统 的 高精 度 运动 控制 要 求 , 文 分析 了各 轴相 关的 重要 的 运动 控 制参
数 的含 义及作 用 , 出了一种判 断运 动控 制 参数 改善 程 度 的有 效 的定 量 的方 法 : 控 制软 件 中增加 提 在
一
个特殊 的功 能 , 即将每 次加 工试验 过程 中各轴 的跟 随误 差 实时记 录到指 定 的 文件 中, 然后 通过 分
whih i s d o h e ui m e t o e ie mo in c n r lfo ee tia ic a g c i ng c sba e n t e rq r e n fpr cs to o to r m lcrc lds h re ma hni .Th n,a e
At ls , h p i i e r me e sa d o iia r a ee sa ebo h a a t t e o t z d pa a tr n rgn l m pa m tr r t ppl d t u h a a h ig pr - i o r n t e s me m c i n o e n ga rm whih i f ra l te g a c s o i l r who e da ee s0 5 mil e e . e o h rpaa t r e p u v re Tw o t e s im t ri . lm t r Th t e me e sk e n a id. i r
(ntueo c ieyMauatr gT c nlg ,Mi yn ih a 2 0 C i ) Istt f i Mahnr n fc i eh o y un o a a gSc un6 0 , hn n 1 9 a
简介pmac运动控制卡
简介pmac运动控制卡
PMAC运动控制卡内部使用了一片Motorola DSP 56003数字信号处理芯片,它的速度、分辨率、带宽等指标远优于一般的运动控制卡。
伺服控制包
括PID加Notch和速度、加速度前馈控制,其伺服周期单轴可达60μs,二轴
联动为110μs。
产品的种类可从二轴联动到三十二轴联动。
甚至连接
MACRO现场总线的高速环网,直接进行生产线的联动控制。
与同类产品相比,PMAC运动控制卡的特性给系统集成者和最终用户提供了更大的柔性。
它允许同一控制软件在三种不同总线(PC-XT和AT,VME,STD)上运行,由此提供了多平台的支持特性。
并且每轴可以分别配置成不同的伺服类型和
多种反馈类型。
PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价
格不菲,但是使用及其方便,功能也极其强大。
PMAC于东控制卡它能够对
存储在内部的程序进行单独运算,执行运动程序、PLC程序进行伺服环更新,并以100Mb/s以太网口与主计算机进行通讯。
其速度、分辨率、带宽、伺服
控制精度等指标远远优于一般的控制器,具有位置比较脉冲输出和D/A输出,并且能够接收编码器的反馈信号,可以控制步进、交直流伺服、直线电机、
液压伺服等各类电机,可以接收多种检测元件的反馈功能,并且允许用户使
用VC++、C、C++、VB、Delphi等多种语言开发程序,极大地方便了用户。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样。
最新PMAC运动控制卡培训资料

执行 PLC 程序
在处理器允许的时间内尽可能快的扫描后台PLC PLC用在任何与运动程序异步的任务场合
DELTA TAU
Data Systems, Inc.
PMAC 任务优先级
单字符输入/输出
高
每个字符占用200纳秒,最高优先级保证PMAC在字符操作时不会失
去主机的控制
换相更新
缺省时无刷电机换相周期110微秒(换相操作占用3微秒 ),占用PMAC 运算能力的3%
伺服环更新
计算新的指令位置,读入新的实际位置,差值计算输出,缺省的伺服更 新时间442微秒(更新操作占用30~60微秒),占用PMAC运算能力7%
PWM
PWMABOT
Va
n
PWMBTOPn PWM PWMBBOT
n
PWMCTOPn PWM
PWMCBOT n DC BUS -
Vb
Motor
Vc
Encoder
换相算法 Encoder
DAC1 DAC2
AGnd
换相算法
ia measured
ib mEenacsoudreerd Feedback
DELTA TAU
PMAC 看门狗计时器 DELTA TAU
Data Systems, Inc.
(中级)
实时中断,置位W.D
后台任务经常没有事件, 因此停止更新计时器.
NOES Y
读 W.D 寄存器
W.D寄存器 > 0
E YES WS.DY.
寄存器递减计数
PMAC 算法确保 看门狗 检测25HZ 时钟信号.使得前后台任务稳定进行.
基于PMAC运动控制卡的数控系统的研究的开题报告

基于PMAC运动控制卡的数控系统的研究的开题报告一、研究背景随着机械加工技术的不断发展,数控技术作为该领域的代表性技术之一,得到了广泛的应用。
数控技术不仅提高了机械加工精度和效率,而且可以提高产品质量和加工的灵活性。
因此,数控系统的研究和开发对于促进机械加工技术进步和推动产业发展具有重要的意义。
针对数控系统的研究,目前主要采用的是基于PC的控制台或嵌入式系统。
然而,这些系统在运行速度和实时性方面受到限制,尤其是在高速运动或复杂运动控制时,常常无法满足要求。
因此,寻求一种高速、高性能的控制系统极为必要。
二、研究内容本研究将采用基于PMAC(Programmable Multi-Axis Controller)运动控制卡的数控系统。
该卡采用先进的DSP技术和FPGA技术进行高速计算,并具有快速的数据交换接口,可以实现高速、高精度的运动控制。
具体研究内容包括:1. 研究PMAC运动控制卡的原理和特点,分析其在数控系统中的应用优势。
2. 设计数控系统的硬件结构,包括运动控制卡、PC机、伺服电机及传感器等。
3. 开发数控系统的软件控制程序,实现运动控制和操作界面的设计。
4. 针对高速、高精度运动控制的需求,对系统进行性能测试和实验验证。
三、研究意义本研究以PMAC运动控制卡为核心,旨在探索一种高速、高精度的数控系统,具有以下意义:1. 提高数控系统的运行效率和精度,满足高速、多轴、复杂曲线等运动控制需求。
2. 推广PMAC运动控制卡的应用,为数控系统的开发提供新的技术手段。
3. 拓展数控技术的应用领域,促进机械加工技术的进步和发展。
四、研究方法本研究采用实验研究和理论分析相结合的方法,具体步骤为:1. 研究PMAC运动控制卡的原理和特点,分析其在数控系统中的应用优势,建立数学模型。
2. 设计数控系统的硬件结构,包括运动控制卡、PC机、伺服电机及传感器等,并进行连接测试和功能验证。
3. 开发数控系统的软件控制程序,实现运动控制和操作界面的设计,进行性能测试和参数优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
种组成形式:DNC ✓ PC嵌入型NC 即在传统的专用数控机床中嵌入PC技术,PC与CNC
之间用专用总线连接。 -840系统。 ✓ 运动控制器+PC型 即在通用PC的扩展槽中插入运动控制卡,完全采用
以PC为硬件平台的数控系统。-PMAC运动控制器 ✓ 全软件型NC 即完全采用PC的全软件形式的数控系统。NC的全部
功能不能在最小的频率内检测,卡上的看门狗将报警 六、与主机通信
1.随时与上位机实时通讯,甚至在一个运动序列中间; 2.将命令放入一个程序缓冲区以便以后执行; 3.如果命令非法则将向上位机主机报错。 七、任务优先级 1.任务是按照优先级电路组织起来,使应用程序以最优化、高效、安全的 运行 2. 优先级是固定的,但是他们的频率时可以由用户控制的
运 13. 通用自动化---输运带/同步
控制
3)PMAC 的典型开放式应用
A B C
Amplifier
A BC
interface
功率 放大
Motor
Enc. Halls
Machine I/O
工业现 场总线
PMAC
驱动受控 机械对象
Software Interface
4)PMAC 的应用系统建立
硬件
数控装置
控制模块
管理模块
电 位 插刀 误 速 G
监中P
机 置 补补 差 度 功 控 断 L
运 运 计计 补 处 能 处 处 C
动 动 算算 偿 理 处 理 理 处
控控
理
理
制制
数控软件功能模块
部分控制模块功能
电机运动控制 插补计算 刀补计算 监控处理 中断处理
匀加 速/ 控减 制速
控 制
直螺 线旋 、线 圆、 弧空 插间 补插
Enc
P (proportional gain比例增益) Ix30 I (integral gain积分增益)Ix33 D (derivative gain微分增益) Ix31
Spring刚性,刚度
Shock Absorber 减震,吸收
Important Setup I-Variables
SETUP PROGRAM FUNCTION
3、PMAC系列运动控制器
PMAC 1 的标准配置
➢20MHz Motorola DSP 56001系 ➢线性,圆弧, 三次轨迹计算,
列数据信号处理器
样条插补
➢8路(数模转换)16位DAC输出 ➢256个运动程序存储能力
➢16个码盘通道输入
➢64个异步PLC程序存运行
➢16个通用I/O
➢超大程序的实时下载执行功能
Communications Variables Motor Activated Flags & Modes Variable DAC Configuration Position Encoder Configuration DAC Trimming "Velocity" Encoder Configuration Encoder Relative Scaling Preliminary Tuning Variables Jogging Setup Variables Position Capture Configuration Homing Setup Variables
1)PMAC 的功能
一、执行运动程序 1. PMAC 在某一时间执行一个运动, 并执行有关运动的所有计算 2. PMAC 总是在实际运动之前,正确地调和即将执行的运动 二、执行PLC程序 1. 以处理器允许的时间尽可能快的扫描PLC程序 2. PLC适用于某些异步于运动程序的运动过程 三、伺服环更新 1.对于每一个电机, PMAC都以一个固定频率(2KH左右)自动对其进行
为了解决这些问题,人们提出了“开放式数控系统”的 概念。这个概念最早见于1987年美国的NGC(Next Generation Controller)计划, NGC控制技术通过实现基于相 互操作和分级式的软件模块的“开放式系统体系结构标准 规范(SOSAS)”找到解决问题的办法。一个开放式的系 统体系结构能够使供应商为实现专门的最佳方案去定制控 制系统。
➢I/O扩展端口
➢64位位置计数范围
➢越程极限,回原点,伺服放大 ➢位置环,速度环,电流环三环
器报警,使能标志信号接口
矢量控制能力
➢LCD和VFD显示端口
➢曲线加减速控制
➢Bus and/or RS-422通信
➢自定义伺服算法能力
➢脱机运行
➢电子齿轮
➢G-Code 编程(可自定义)
➢先进的PID及扩展伺服算法
(1)开放式数控系统的定义
• IEEE关于开放式系统的定义: 一个开放式数控系统应能够在多平台上运行,能
够与其他系统进行操作,并能够给用户提供一 致的交互界面 ; 1. 系统互换性; 2. 可伸缩性; 3. 可移植性; 4. 互操作性; 5. 可扩展性; 6. 不依赖于硬件、模块化;
(2)开放式数控系统的结构形式:
5.1 开放式运动控制系统
5.1.1 开放式数控系统 1、传统数控系统
一般数控系统由3部分 组成:
1,MMC:人机接口 2,CNC:运动控制部
分,
包括伺服部分,但一般
主轴在PLC部分。 3,PLC:机床的顺控部
分
人机接口 MMC PLC
NC控制器
伺服驱动器
CNC
传感器
机床强电
数控机床
数控系统软件功能模块
软件设置及定义
接线 判断连接 M变量内存图 定义坐标系
系统编程
设计程序结构 编写和调试程序
5)PMAC 的指令
1. I-变量 (1024)
初始化和变量设置 提前定义其含义 有的影响卡的全局 有的是电机的定义 有的是坐标系的定义 有的是编码器的定义
2. P-变量(1024)
用户定义的变量 48-bit 浮点格式 全局存取 (与坐标系无关)
数控装置
管理模块
控制模块
电位插刀误速G 监中P
机置补补差度功控断L
运运计计补处能处处C
动动算算偿理处理理处
控控
理
理
制制
5.2 PMAC运动控制器
PMAC-Programmable
Multi-Axis
Controller是可编程多轴运动控制器,也称运动控
制计算机.
它 主 要 由 MOTOROLA DSP CPU 与 DELTA
I-VARIABLES
CONFIGURED
I3, I4, I9
I100
I125
(5)基于运动控制卡的开放式数控系统
常用的运动控制器主要包括PLC、PC-Based运动 控制卡、专用系统和驱动器集成运动控制。
运动控制卡是一种PC-Based的运动控制器, 主要厂商包括Delta TAU (PMAC)、GALIL (DMC)、 Bardor、Trio(英国翠欧)、NI、Advantech、Adlink、 Googol(固高)、雷赛、众为兴、成都步进、摩信 等。PMAC在高端市场表现最好,GALIL也表现不错。 从数量上讲,国内的厂商的出货量更多,但是主要 针对低端市场。Biblioteka Ix212*Ix21
Ix21
Ix21
2*Ix21
T
6)受控制电机的运动方式
Ix20 加速时间 (Jog, Home) Ix21 S-曲线加速时间 (Jog, Home)
V
Ix20>2*Ix21
Ix21
Ix21
Ix21
T Ix21
Ix20
7)通过设置 I变量可以控制以下典型 P.I.D 伺服环
Following
(4)软件数控
它的CNC软件全部装在计算机中,而硬件部分 仅是计算机与伺服驱动和外部I/O之间的标准化通 用接口。目前由于存在着操作系统的实时性标准统 一性及系统稳定性等问题,这种系统目前正处于探 求阶段,还没有大规模投入到实际的应用中。目前 全软件型NC的典型产品有美国MDSI公司的Open CNC、德国Power Automation公司的PA8000 NT等。
补
刀刀 具具 半长 径度 补补 偿偿
键显 盘示 处处 理理
报急 警停 处处 理理
2、开放式数控系统
随着数控技术的发展,数控系统变得越来越复杂,暴露 出许多自身固有的缺陷。最大的问题是,这些数控系统都 是专门设计的,它们具有不同的编程语言、非标准的人机 接口、多种实时操作系统、非标准的硬件接口等,这些缺 陷造成了数控系统使用和维护的不便,也限制了数控技术 的进一步发展。
运动控制系统
制作人:丁富伟 2011年10月
5.1 开放式运动控制系统 5.2 PMAC运动控制器 5.3 PCI运动控制卡设计
5.1 开放式运动控制系统
基于PC的伺服运动控制系统是一种开放式结 构的系统,可以充分利用PC机的资源和第三方软 件资源完成用户应用程序的开发,将生成的应用 程序指令通过PC并行总线传送给运动控制器,运 动控制器根据来自PC机的应用程序命令,按照设 定的运动模式,向驱动器发出运动指令,完成相 应的实时运动规划。
伺服更新 2. 伺服环根据运动的设计者编写程序公式,从当前的实际位置和指令位置
增加指令的数值 四、换相更新 1. PMAC 以9KHZ的频率自动进行换向计算和控制; 2. PMAC 测量并估算 转子的磁场定向,然后处理电机的相之间的指令
1)PMAC 的功能
五、资源管理 1. 常规管理 定期自动执行资源管理功能,以确认谁正常 2. 报警 跟随误差限制、 硬件超程限制、软件超程限制、 放大器报警 3. 看门狗的更新 在每个PLC扫描之间, PMAC 执行上述任务保证自身的正常更新,如果这些