Cognex康耐视相机操作使用说明书
康耐视相机操作手册
康耐视相机操作使用说明书文件状态:■草稿□修改□定稿文档密级□不保密■内部□机密项目名称版本号 1.0描述康耐视相机操作使用说明书编写人余国鹰编写日期2015/9/10 审核人审核日期目录一、康耐视相机具体设置 (3)1.1软件安装 ......................................................................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3C ODESYS通信注意事项 (6)二、相机标定 (7)2.1相机校准 (7)2.2绝对坐标实现 (9)2.3相对坐标实现 (10)三、示教器示例程序 (11)3.1绝对坐标实现范例 (11)3.2相对坐标实现范例 (11)四、CODESYS逻辑开发 (13)4.1S OCKET通信开发 (13)4.2外部点数据处理 (14)五、细节说明 (17)康耐视相机操作使用说明书一、 康耐视相机具体设置1.1 软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2 流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight 浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.2上海新时达机器人有限公司4. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
康耐视VisionPro软件操作手册V10

广州三拓识别技术有限公司GUANGZHOU SANTUO INDETIFCATION TECH.CO.,LTD.康耐视VisionPro操作手册V1.02013522‐‐•设置IP地址•获取图像•图像定位•条码检测•结果输出(超级终端)设置IP地址1,手动配置电脑网卡的IP地址。
如下图:2,从开始菜单/Cognex菜单下打开GigE Vision Configuration Tool.VisionPro以太网相机IP地址配置软件3,配置相机的IP地址与电脑对应网卡的IP地址为同一个网段。
获取图像1,启动VisionPro主程序2,双击image Source (图像来源) 打开设置对话框。
3,选择“照相机”。
并从相机列表里选择对应的相机。
然后视频格式选择“Mono”。
注明:Mono表示黑白图像。
4,点击“初始化取相”,修改曝光时间为0.5ms.取消时限前面的勾。
说明:”时限”即取图像超时。
表示执行了取图像的命令,但在设定时间内没有获取到图像。
多在外部触发模式时,等待外部电眼等触发信号时间过长而报错。
5,点击左Image Source 窗口左上角的相机符号,即显示实时画面。
在画面上点击右键来缩放图像等。
6,若需要设置为外部电眼触发。
可切换到“闪光灯和触发器”页面。
选择“硬件自动”选项。
图像定位1,选择“作业编辑器”窗口。
点击左上角的“单次运行作业”按钮。
获取一张图像。
2,从窗口工具栏的“显示VisionPro工具”打开工具窗口。
里面为此软件的检测算法。
3,定位图像设置步骤。
首先从工具窗口拖动CogPMAlignTool和CogFixtureTool到作业编辑器。
并按住鼠标左键对这两个工具进行连线编程。
如下图。
4,双击CogPMAlignTool1,在弹出的窗口对其参数进行设置。
首先点击“抓取训练图像”按钮。
“训练图像”表示一张标准的图像。
若相机现在拍的图像不是很理想,则重新执行拍照动作后再点击此按钮。
Cognex培训教程实用课件
2
第2页/共15页
(二) IP地址设置
搜索到相机后,选择一个相机,填写相应的内容,不要自动获得IP地址,选择“使用下面网络设置”
主机名:自定义(自己方便识别就好) IP地址:自定义,一般都是192. 168. 1.X,根据自己本地网络而定,不要与下一个相机的IP和电脑本 地IP有冲突和重复即可,如果不知道自己电脑IP,点击下面“复制PC网络设置”就好 最后应用 然后重启24V电源,点击菜单下的“查看——In-Sight网络”快捷键“CTRL+SHIFT+1”查看网 络此时就出现了你添加的相机名称了
10
第10页/共15页
(七) OK跟NG判定
设定一个取值范围“180”至“190”,用“InRange () ”函数, G41表示引用数 据的位置, 180, 190表示公差范围
“186.104”在公差范围内,二进制值被赋予“1” 判断“ok”“ ng”, “1”为“ok”, “0”为“ng”
11
数量 1 1 1 1 1
1
第1页/共15页
(一) 相机的连接
设备开启24v电源后,将相机的电源线 (绿色)和I/O线连接好,启动In-Sight Explorer 登录管理员帐户,账号是admin,密码不用 默 认 为 admin, 点 击 菜 单 栏 的 “ 系 统 ” 选 项 的 “ 将 传 感 器 / 设 备 添 加 到 网络 ” 如 图
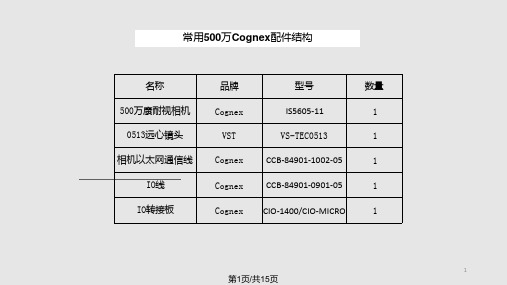
常用500万Cognex配件结构
名称 500万康耐视相机
0513远心镜头 相机以太网通信线
IO线 IO转接板
品牌 Cognex
VST Cognex Cognex Cognex
型号 IS5605-11 VS-TEC0513 CCB-84901-1002-05 CCB-84901-0901-05 CIO-1400/CIO-MICRO
【机器视觉Cognex康耐视】Cognex 康耐视相机如何设置不同的相机拍照参数

1 我们知道,相机即便固定了,还是可以设置不同的参数(曝光时间,如果镜头可以调节还可以设置焦距等),下图所示为曝光时间为1ms,10ms,100ms的拍照结果
1
2 而如果要手动调节,只需要先改变这个数值即可
3 那如果要在程序自动运行的时候控制,比如我发送AAA,则以1ms 的曝光参数执行拍照,如果我发送BBB,则以10ms的曝光参数执行拍照。
首先新建一个项目,则只有A0单元格一个内容,选中曝光,然后插入绝对引用,此时曝光参数可以参考某一个单元格,比如我设置曝光参数就是C0单元格即可。
2
3
4 先把所有可能的情况罗列出来,最后H2中的一个if 语句比较恶心。
C2 = If(C2,1,If(D2,10,If(E2
,100,0)))
5 这样,当我发送AAA过去之后,C2必然是成立的,从而if语句将返回1,就是曝光值,这样执行写入图像的时候,将以曝光时间为1ms的参数保存,我发送BBB,则曝光时间为10ms,如果发送的不对,则返回0,不会执行写入图像的功能。
4
5。
Cognex康耐视相机操作使用说明书

康耐视相机操作使用说明书目录一、康耐视相机具体设置错误!未指定书签。
1.1软件安装错误!未指定书签。
1.2流程编辑 31.3Codesys通信注意事项6二、相机标定 72.1相机校准 72.2绝对坐标实现 92.3相对坐标实现错误!未指定书签。
三、示教器示例程序错误!未指定书签。
3.1绝对坐标实现范例错误!未指定书签。
3.2相对坐标实现范例错误!未指定书签。
四、C odesys逻辑开发错误!未指定书签。
4.1Socket通信开发错误!未指定书签。
4.2外部点数据处理错误!未指定书签。
五、细节说明错误!未指定书签。
一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1.设置电脑本地连接IPV4地址为(设置为39段即可)。
2.双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13.双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.24.在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;➢开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节➢设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
在“定位部件”的设置对话框中,如下图1.5所示,合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败;旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败图1.5➢配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作,如下图1.6所示。
康耐视VisionPro软件操作手册V10

广州三拓识别技术有限公司GUANGZHOU SANTUO INDETIFCATION TECH.CO.,LTD.康耐视VisionPro操作手册V1.02013522‐‐•设置IP地址•获取图像•图像定位•条码检测•结果输出(超级终端)设置IP地址1,手动配置电脑网卡的IP地址。
如下图:2,从开始菜单/Cognex菜单下打开GigE Vision Configuration Tool.VisionPro以太网相机IP地址配置软件3,配置相机的IP地址与电脑对应网卡的IP地址为同一个网段。
获取图像1,启动VisionPro主程序2,双击image Source (图像来源) 打开设置对话框。
3,选择“照相机”。
并从相机列表里选择对应的相机。
然后视频格式选择“Mono”。
注明:Mono表示黑白图像。
4,点击“初始化取相”,修改曝光时间为0.5ms.取消时限前面的勾。
说明:”时限”即取图像超时。
表示执行了取图像的命令,但在设定时间内没有获取到图像。
多在外部触发模式时,等待外部电眼等触发信号时间过长而报错。
5,点击左Image Source 窗口左上角的相机符号,即显示实时画面。
在画面上点击右键来缩放图像等。
6,若需要设置为外部电眼触发。
可切换到“闪光灯和触发器”页面。
选择“硬件自动”选项。
图像定位1,选择“作业编辑器”窗口。
点击左上角的“单次运行作业”按钮。
获取一张图像。
2,从窗口工具栏的“显示VisionPro工具”打开工具窗口。
里面为此软件的检测算法。
3,定位图像设置步骤。
首先从工具窗口拖动CogPMAlignTool和CogFixtureTool到作业编辑器。
并按住鼠标左键对这两个工具进行连线编程。
如下图。
4,双击CogPMAlignTool1,在弹出的窗口对其参数进行设置。
首先点击“抓取训练图像”按钮。
“训练图像”表示一张标准的图像。
若相机现在拍的图像不是很理想,则重新执行拍照动作后再点击此按钮。
Cognex 相机象棋识别操作指南

11100智能相机操作指南——象棋识别项目一、 硬件和软件视觉检测系统硬件由In-sight 系列1100相机主机、POE 电源、分接电缆、镜头、红色环形光源等组成。
软件为康耐视官方下载软件In-sight Explorer4.9.0。
二、 安装1、 安装固件(可选)使用固定件将视觉系统固定到安装面 (1)将固定件对准视觉系统上的安装孔。
(2)将M3×6螺丝(4个)插入安装孔,然后使用2.5cm 六角扳手拧紧螺丝;最大扭矩0.9039Nm (8in-1b )。
2、 安装镜头(1)拆下镜头保护盖和贴在CCD 上的保护膜(如果有)(2)将CS 型或C 型(带有5mm 伸长环)镜头连接到视觉系统。
所需的精确镜头焦距取决于机器视觉应用程序要求的工作距离和视野。
23、 安装光源根据检测要求,将环形光源安至合适位置,既能达到检测要求,又不产生干涉。
三、 通讯连接3输出及触发:分接电缆接线图如下所示四、 Explorer 软件编程41、原理通过相机视觉传感器对单个象棋进行拍照处理,利用图像对比技术,将最终结果输出给PLC 。
2、图像采集及通讯相机通过外部PLC 触发,获取图像。
图像的质量取决于镜头的焦距、光圈及相机内部曝光设置,一般情况下设定好位置及参数不能在使用中改动。
输出通过网络通讯方式与PLC 交换数据。
(1)相机获得图像对应于软件中如下函数。
(2)与外部通讯函数,交换数据通过TCP/IP 协议将结果输出给外部设备。
3、 对换取图像进行模型提取与运算 (1)获取图像,效果如下:与PLC 网络通讯函数5(2)对图像进行模型训练(3)利用数学函数,对结果做判断。
Findpattern 功能函数,对黑色象棋文字进行区域模型训练,对红色象棋文字进行边模型训练。
6(4)最终生成唯一结果根据现场检测结果,设置相应的阈值,参数一当设置完成,不可变动。
五、 操作注意事项1、 相机在使用过程中严禁碰撞,镜头禁止触摸。
康耐视DM7500说明书
康耐视DM7500说明书
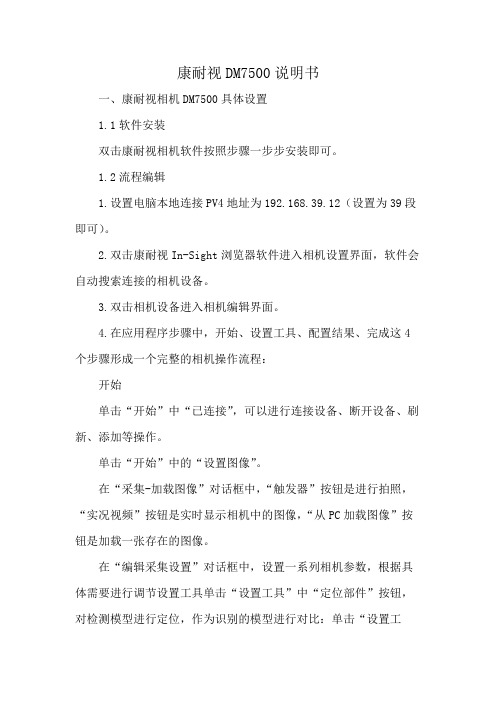
一、康耐视相机DM7500具体设置
1.1软件安装
双击康耐视相机软件按照步骤一步步安装即可。
1.2流程编辑
1.设置电脑本地连接PV4地址为19
2.168.39.12(设置为39段即可)。
2.双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备。
3.双击相机设备进入相机编辑界面。
4.在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程:
开始
单击“开始”中“已连接”,可以进行连接设备、断开设备、刷新、添加等操作。
单击“开始”中的“设置图像”。
在“采集-加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比:单击“设置工
具”中“检测部件”按钮,对模型进行编辑操作。
在“定位部件”的设置对话框中,合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败:旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败。
康耐视相机说明书 软件_视觉工具

25 - Confidential
25
介绍
亮度工具根据平均灰度值决定特征存在与否。适用于好元件特征明显暗于或 亮于坏元件特征的情况。
26 - Confidential
6
物理设置- 照明
照明因素 外部照明 相机上的LED灯 环境灯及其效果
7 - Confidential
7
物理设置- 镜头
光圈设置 图像的亮度 固定光圈 可调式光圈
8 - Confidential
8
1.开始 – 设置图像
Get Image Acquisition
Calibration
9 - Confidential Settings
FOUND
NOT FOUND
•Pattern tool – looks in a search area for groups of edges (pattern) to form a geometric shape.
•Other: PatMax, Circle, and Blob
18 - Confidential
10 - Confidential
10
校准
线性校准 将工具的位置或者检测结果的像素值转换成实际单位值(微米、毫米、厘
米或者英寸) 非线性校准
补偿镜头的径向畸变、桶形失真、透视变形等, 或者In-Sight相继安装角度导 致的偏差,同时输出实际单位值
11 - Confidential
11
Calibration – Scale
HSI:
红
255, 0, 0
红
0, 255, 85
绿
0, 255, 0
绿
85, 255, 85
(2024年)康耐视相机标定及设置ppt课件

通过与其他标定方法进行对比实验,分析康耐视相机标定的优势 和不足,为用户提供更全面的评估参考。
23
实际应用场景举例
2024/3/26
工业检测
在工业生产线上,利用康耐视相机进行产品检测和质量控 制。通过精确的相机标定,可以提高检测的准确性和稳定 性。
机器人视觉导航
在机器人自主导航系统中,利用康耐视相机获取环境信息 。通过相机标定,可以提高机器人对环境感知的准确性和 鲁棒性。
算得到的相机内外参数进行优化,提高标定精度。
14
优化标定结果
1 2
重投影误差分析
将计算得到的相机内外参数应用于标定图像,计 算重投影误差并分析其分布情况,以评估标定结 果的准确性。
参数调整与优化
根据重投影误差分析结果,对相机内外参数进行 微调或重新优化,以进一步提高标定精度。
结果验证与保存
3
将优化后的相机内外参数应用于实际拍摄的图像 中,验证其准确性和稳定性,并将结果保存以便 后续使用。
提取角点信息
使用图像处理算法提取标定图片 中的角点信息,为后续计算提供 数据。
计算相机参数
基于张氏标定法和非线性优化方 法,计算相机的内外参数及畸变 系数。
准备标定板
制作高精度棋盘格标定板,格子 大小和数量需满足标定要求。
2024/3/26
验证标定结果
使用标定得到的参数对另一组标 定图片进行处理,观察处理结果 是否符合预期,以验证标定结果 的准确性。
标定板类型
根据标定需求选择合适的标定板 类型,如棋盘格标定板、圆点标 定板等。
标定板尺寸
根据相机视场和标定需求选择合 适的标定板尺寸,确保标定板在 相机视野内清晰可见。
2024/3/26
康耐视相机软件手册说明书

features and operations, as well as imaging and acquisition controls. Firmware updates—ensure you are using to most up-to-date firmware for the camera to take advantage of improvements and fixes.Minimum System Requirements Gigabit Ethernet host adapter GigE Vision compatible camera Cognex VisionPro 5.0 or newer Installation and Configuration Cognex eBus Universal Pro Driver The Cognex eBus Universal Pro Driver is a GigE Vision filter driver that must be enabled in order to use GigE cameras in Cognex. This driver operates between the camera and the Microsoft built-in UDP stack to filter out GigE vision stream protocol (GVSP) packets. The CPU does not process all the packets, and therefore reduces CPU usage. Network Properties Menu Cognex GigE Vision Configuration Tool Ensure the camera is enumerated correctly. The host adapter and the camera must be on the same subnet.Users can use the tool to manually set the IP address and the subnet mask of the host adapter or the camera. Cognex GigE Vision Configuration Tool Understanding GigE Vision GigE Vision is a standard for camera control developed for Gigabit Ethernet cameras. All cameras supporting GigE Vision will interact the same way with software supporting GigE Vision such as VisionPro. FLIR GigE cameras such as Blackfly S, Blackfly, Flea3, Grasshopper3, and Grasshopper2 are GigE Vision compatible cameras that work seamlessly with GigE Vision software.Each camera attribute such as shutter time is controlled by a specific GigE Vision attribute. All GigE Vision software provides a Graphical User Interface (GUI) to control these GigE Vision attributes. The following sections will describe what these controls are in VisionPro and how each control is mapped to the respective GigE Vision attribute. packet size and packet delay, based on desired resolution and frame rate. Packet Size (GevSCPSPacketSize) Packet size influences the number of interrupts generated which affects CPU usage. The larger the packet size, the fewer the interrupts for the same amount of data.。
Cognex VisionPro V1.1.0快速入门指南说明书

Scope of this documentThis application note provides a quick overview on how to get started with Allied Vision‘s Vimba Cognex Adapter. In-depth information is available in the listed documents.CompatibilityThe Vimba Cognex Adapter allows using Allied Vision GigE, USB, and 1394 cameras with Cognex VisionPro 6.0 or higher.Recommendations for GigE camera usersAlthough Cognex VisionPro is compatible with Allied Vision GigE cameras, installing Vimba and using the Vimba Cognex Adapter offers advantages:•The Vimba GigE Filter driver enables high camera performance with low CPU load.•Vimba Viewer eases step-by-step configuration of the GigE settings as described in our camera technical manuals (IP address, bandwidth, packet size, and more).If you don’t install Vimba Viewer, you can configure the GigE settings with the Cognex GigE Configuration Tool, which is included in the Cognex VisionPro installation.•With Vimba Viewer, you can easily get a first image and try out camera settings.Allied Vision camera VisionPro with Vimba Adapter VisionPro without Vimba Adapter GigE camera Compatible Compatible USB camera CompatibleIncompatible1394 cameraCompatible with 32-bit and 64-bit OSCompatible with 32-bit OS onlyTable 1: Compatibility - Cognex VisionPro with and without Vimba Cognex AdapterDownloadsDownload software:•Vimba for Windowshttps:///en/products/software.html•Cognex VisionPro/Download camera documentationDownload camera documentationhttps:///en/support/technical-documentation.htmlInstallation1.Select, install, and configure your adapter card as described in the corresponding manual for yourcamera (GigE: activate jumbo frames).2.Install Vimba. As a minimum, select the option 3rd Party Applications .Installation orderYou can install Cognex VisionPro either before or after installing the other components.Cognex driver is unnecessaryInstalling the Cognex driver additionally to the drivers provided with Vimba is possible, but unnecessary.Figure 1: Vimba installation3.If you want to install Vimba Viewer additionally, click Vimba Applications and selectCamera Demonstration .4.Make sure that Install Vimba Drivers is checkmarked before clicking Exit .Figure 2: Install Vimba ViewerFigure 3: Install Vimba Drivers5.Start the Vimba Driver Installer .6.Install and activate the Vimba driver for your camera (find a detailed description in the Vimba Manual,Chapter Vimba Driver Installer ).7.Start the Cognex VisionPro QuickBuild application and double-click Image Source .Figure 4: Vimba Driver InstallerFigure 5: QuickBuild -> Image Source8.Select Camera -> Device (camera recognition may take a while). This choice opens the camera via theVimba driver, whereas the other option (here: GigE Vision) opens the camera with the Cognex driver (if installed).9.Click Initialize Acquisition .Figure 6: Device opens the camera with the Vimba driverFigure 7: Initialize Acquisition10.Tabs for setting camera and image properties are accessible. Now you can adjust the settings:11.To easily get a first image, go to the Strobe & Trigger tab and select Free Run.Figure 8: Tabs are accessibleFigure 9:Select Free Run12.In the Job Editor Window, click Run Job Continously .You can now view live images from your Allied Vision camera.Figure 10: Run Job ContinuouslyFigure 11: Live camera imagesFurther readingsTo learn more about using your camera with the Vimba Cognex Adapter, read the Vimba Cognex Adapter Manual, which is part of the Vimba installation.To get to know Cognex VisionPro, read the documentation provided by Cognex, especially the Vision Pro Quick Reference, which is part of the Cognex VisionPro installation.Troubleshooting•Before starting Cognex VisionPro, make sure no other application uses the camera.•Camera recognition may take a while, especially with GigE cameras.•Make sure that QuickBuild and the aikserver run with administrator rights or adjust the memory settings (find details in the Vimba Cognex Adapter Manual).•Test if your camera works with the Vimba Viewer. If not, check the settings of your GigE, 1394, or USB card.•Open the Vimba Driver Installer and make sure the Vimba drivers are in use.•If your camera doesn’t reach the maximum frame rate, check if the exposure time is short enough.Example: If the exposure time is 100 ms, the camera cannot acquire more than approximately 10 fps. •GigE cameras: Follow the installation instructions in the technical manual of your camera.•Follow the instructions in the Vimba Cognex Adapter Manual.DisclaimerFor the latest version of this document, please visit our website. All trademarks are acknowledged as property of their respective owners.Copyright © 2019 Allied Vision Technologies.。
康耐视相机的操作
2、 操作员在做卫生的 过程中,尽量不要用手 触摸相机的镜头,相机 的电源线。如果相机上 有灰尘,可以用嘴巴吹 掉就可以了。
3、操作员如发现上图 红色区域中,相机上 面的灯不亮了,或者 下图红色区域中,光 源一直亮着,工位的 报警器一直在响等问 题,请及时通知机修 人员,让他们来解决。
谢谢观看!
在上图中,有三个红色标记的工具,“自定义视图”、“重叠”、 “图形”。可以通过点击工具,实现程序界面的切换。切换后的 图如下。
自定义视图,显示当前界面产品的型号、拍照次数、拍照结果。
重叠,显示电子表格程序,片,拍照是否合格。
通过点击查看中“选择板”,可以关闭“选择板”,同时, 也可以关闭“In-Sight 网络”、“In-Sight 文件”等等。
2、相机软件的联机与脱机
软件联机与脱机有两种方法,如上图红色区域中。一般在 操作过程中,相机是处于联机状态下的。
软件有联机、脱机、通讯联 机三种状态,当图中红色区 域的“脱机”变成了“通讯 联机”那么说明,当前相机 与plc的通讯出现了问题,例 如程序号与产品型号不对应。
3、相机软件电子表格视图的切换
双击安装包,点击Next下 一步,等待安装进度条完 成,最后点击finish,完 成安装。
1、相机软件的启动
1、双击In-Sight Explorer,打开后,如下图2,然后点 击菜单栏中的系统,系统中的选项。
1
2
打开选项后,如 右图。第一次安 装时需要脱机编 程密钥。
如果没有脱机编 程密钥,将无法 进行编程和其他 操作。密钥需要 在康耐视的官网 里去获取。
4、相机软件中程序号对应产品型号 的掌握
点击文件中的“打开作业”,打开后如右图,图中有三个程序号: 1.job、101.job、31.job。这三个分别对应三种产品型号:A01、A10、 A03。
Cognex 照相机 使用总结
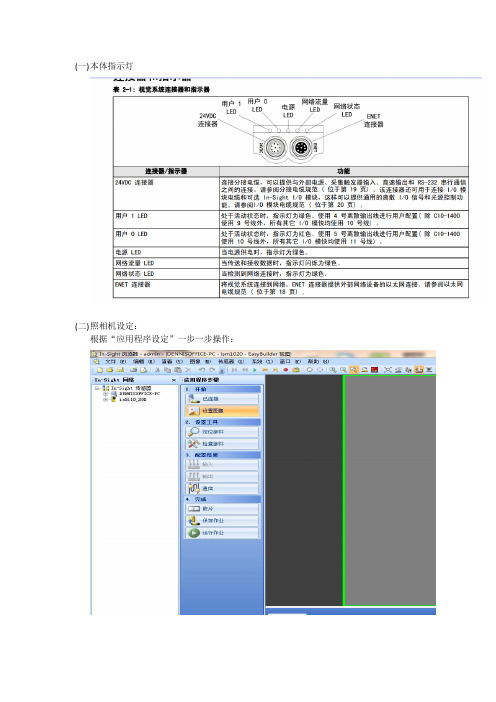
(一)本体指示灯
(二)照相机设定:
根据“应用程序设定”一步一步操作:
1.已连接:
注意方框左上角,当前显示DENNISOFFICE-PC表明当前是用的仿真器,双击is5110_SGE照相机后,标签即改变,软件才连接到照相机。
2.设置图像
调整图像质量:曝光时间可以调整图像质量。
我们采用PROFINET, 所以触发方式注意要选择“网络”!
3.定位部件
框选目标
4.检查部件
选择“一维码”“二维码”。
5.通信
选择PROFINET,并配置所需的数据。
请遵循以下配置:
数据:
6.保存作业:
注意勾选“在联机模式下启动传感器”,这样每次上电后它就自动切换到联机模式了。
联机模式:照相机自动工作时的模式。
脱机模式:编程时用的模式。
7.运行作业
可以监控照相机的运行。
在IPC上点击手动按钮以测试触发是否成功。
(三)网络设定
“传感器”---“网络设定”
(四)PLC端:
在HARDWARE 里直接MONITOR 传过来的数据。
然后再在DB里查找问题。
Cognex康耐视相机操作使用说明书
康耐视相机操作使用说明书文档密级□不保密■内部□机密文件状态:项目名称版本号 1.0■草稿描述康耐视相机操作使用说明书□修改□定稿编写人余国鹰编写日期2015/9/10审核人审核日期目录一、 康耐视相机具体设置 (3)1.1 软件安装 ......................................................................................................................................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3 CODESYS通信注意事项 (6)二、 相机标定 (7)2.1 相机校准 ....................................................................................................................................................................................................................... 7 2.2 绝对坐标实现 ............................................................................................................................................................................................................. 9 2.3相对坐标实现 (10)三、 示教器示例程序 (11)3.1 绝对坐标实现范例 ............................................................................................................................................................................................... 11 3.2相对坐标实现范例 (11)四、 CODESYS 逻辑开发 (13)4.1 S OCKET通信开发 ........................................................................................................................................................................................... 13 4.2 外部点数据处理 .. (14)五、 细节说明 (17)康耐视相机操作使用说明书一、康耐视相机具体设置1.1 软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1 ,按照步骤一步步安装即可。
Cognex康耐视相机操作技巧使用使用说明
康耐视相机操作使用说明书目录一、康耐视相机具体设置 (3)1.1软件安装 ......................................................................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3C ODESYS通信注意事项 (6)二、相机标定 (7)2.1相机校准 (7)2.2绝对坐标实现 (9)2.3相对坐标实现 (10)三、示教器示例程序 (11)3.1绝对坐标实现范例 (11)3.2相对坐标实现范例 (11)四、CODESYS逻辑开发 (13)4.1S OCKET通信开发 (13)4.2外部点数据处理 (14)五、细节说明 (17)一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.24. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;➢开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节➢设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
美国康耐视智能相机操作说明书
美国康耐视智能相机操作说明书
一:安装Insight Explorer 4.5.0
二:设置PC和相机在同一网段
三:连接相机
四:设置图像
五:定位部件
六:检测部件
七:通讯
八:保存作业
九:运行作业及联机
十:硬件接线
一:安装Insight Explorer4.5.0
复制光盘的软件至PC硬盘,根据安装向导完成安装软件,安装成功,桌面出现Explorer4.5.0图标,如下:
二:设置相机和PC在同一网段
1.双击软件,在菜单栏选择“系统”>
“将传感器/设备添加至网络”
2.弹出“将传感器/设备调加到网络”对话框
3.选择相机,然后勾选“自动获得IP地址”
4.单击“应用”按钮,待弹出应用成功后,单击“关闭”按钮,显示如下画面
三:连接相机,双击相机“图标”,显示Explorer编辑画面
四:设置图像
1.新建作业
2.设置图像
五:定位部件
1.选择“图案”工具
六:检测部件
1.选择“计数”>“斑点工具计数”
七:通讯
1.输出设置
2.单击“详细信息”设置输出脉冲宽度
八:保存作业,选择启动作业,勾选“联机模式下启动作业”
九:运行作业及联机
十:硬件接线
End。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
康耐视相机操作使用说明书目录一、康耐视相机具体设置 (3)1.1软件安装.................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3C ODESYS通信注意事项 (6)二、相机标定 (7)2.1相机校准 (7)2.2绝对坐标实现 (9)2.3相对坐标实现 (10)三、示教器示例程序 (11)3.1绝对坐标实现例 (11)3.2相对坐标实现例 (11)四、CODESYS逻辑开发 (13)4.1S OCKET通信开发 (13)4.2外部点数据处理 (14)五、细节说明 (18)一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆设备图标),进入相机编辑界面,如下图1.2所示。
图1.24. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;➢开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节➢设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
在“定位部件”的设置对话框中,如下图1.5所示,合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败;旋转公差:检测部件能够旋转的角度围,如果在围之类则会拍照成功,否则会失败图1.5➢配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作,如下图1.6所示。
新时达机器人视觉通信采用的TCP/IP通讯方式,单击“TCP/IP”,如下图1.7所示,在“TCP/IP设置”对话框中,“服务器主机名”设为192.168.39.220(机器人控制器IP地址),“端口”设置与CodeSys中相同,本例中设为9876,“超时时间”设为15000,“结束符”设为字符串(CR13)。
单击“格式化输出字符串”,进行输出操作,如下图1.8所示。
勾选“使用分隔符”,表示在输出之间用逗号分隔符进行隔开,方便进行数据处理操作;单击“添加”按钮,可以输出很多数据,这里只需要输出4个数据,“失败”、“定位器.X”、“定位器.Y”、“定位器.角度”;输出数据说明:均为7个字节宽度,除图案.失败是整形外,其它数据均为浮点型,小数点位数为2位。
1)第一位图案.失败:判定符,为0表示采集到特征,拍照成功;为1则拍照失败。
2)第二位图案.定位器.X:输出用户坐标系下的X方向绝对值。
3)第三位图案.定位器.Y:输出用户坐标系下的Y方向绝对值。
4) 第四位图案.定位器.角度:输出用户坐标系下的相对角度。
图1.6图1.7图1.8➢完成在“完成”中单击“保存作业”,则保存当前作业任务中的所有设置;在“完成”中单击“运行作业”,则运行当前作业任务。
注意,以上参数设定必须在脱机模式下才能够设置,在联机状态下参数不能设置,与外界设备实时通讯必须在联机模式下;物体旋转一定角度拍照失败,看检测部件是否超过相机视野围和旋转角度值设置是否合理。
1.3Codesys通信注意事项a)说明:设定PC端的IP地址,IP地址必须192.168.39.XXX,这里设定为192.168.39.12,用网线与相机控制器相连;b)通信流程包括:建立TCPIP的服务器端并连接,给相机发送指令,从相机接收数据;c)图1.7中如果把“字段分隔符”改为“停止”,则两个数据之间就是无分隔符的直接连接;如果选择其他,则有相应的分隔符号;d)例:采用“消零”为“有”,“字段分隔符”为“停止”的方式时,相机发送数据“-001.00”和“1010.02”时,实际上发送了“45 48 48 49 46 48 48 49 48 49 48 46 48 50 13”(13是回车符的ASIIC码);e)在下载工程成功时,查看通讯是否连接正常。
当client_congnex任务中的step_cognex:=2和server_cognex中的step_server:=2时,此时通讯成功,否则通讯不正常,需要查看设备是否连接好和In-Sight软件是否处于联机状态。
f)详细指令及其他形式的通信可参考文档《通信设定sdnb-cn5-714d_fh_fz5》。
二、相机标定要实现将相机采集的数据转换为机器人坐标系下的位姿数据,必须建立相机坐标系与机器人坐标系的对应转换关系,该过程通过相机标定来实现。
相机也分平面相机和三维相机,前者只支持平面数据采集,后者则可以获取xyz空间值。
以三维相机为例,要详细建立相机三维空间的位置与机器人坐标系的对应关系,必须通过严格的手眼标定来实现。
不同相机有手眼标定算法,通过示教多个点来建立手眼转换关系。
这里不详述。
如果只做平面工件抓取,那只需要工件变化的坐标值x、y以及绕z轴的转动角度c,问题就简单的多,只需要进行平面的简单标定即可实现。
以康耐视相机为例,格力等客户只需要实现流水线来料的抓取操作,标定平面坐标系即可,康耐视相机可以提供移动后的工件相对于移动前的偏移位置量,或者提供工件的绝对移动位置。
这里,我们提供这两种工作方式的实现过程。
2.1相机校准相机默认输出的坐标值是相机采集到的像素值,并非实际工件位置尺寸,因此需要将物理坐标与像素值进行映射标定。
设定校准后,可使测量结果像素值转换为实际尺寸并输出,康耐视提供了校准参数的制作过程。
1.单击“设置图像“,界面右下角出现下图2.1所示界面。
校准类型中有很多种,根据实际需要选择,这里选择“网格”,然后单击“校准”按钮,出现下图2.2所示界面。
图2.12.打印校准网格纸。
在图2.2中,单击“打印网格”按钮,然后将打印的网格纸放在相机视野正中间。
3.在“设置”界面中,“网格类型”为方格图案(带基准),其它值均为默认。
4.单击“姿势”,进入姿势设置界面,如图 2.3所示,原点位置为默认,单击“触发器”按钮,相机会自动拍照,最后单击“校准”,校准工作就结束。
5.单击“结果”,可以查看校准情况,如图2.4所示。
图2.2图2.3图2.46.建立检测模型。
单击“定位部件”,出现如图2.5所示界面,单击“位置工具”中“图案”,然后单击“添加”,单击“OK”,接着单击界面右下角“模型”,拖动绿色模型矩形框,使被检测模型处于绿色矩形框中,最后单击界面右下角“训练”,此时检测模型已经建立。
图2.57.查看模型建立是否成功。
在界面右侧选择板中,可以查看建立图案的情况,绿色圆点表示模型建立成功,同时会输出检测模型的位置、角度、得分,如图2.6所示。
图2.6通过以上7步即可完成相机的校准过程。
2.2绝对坐标实现绝对坐标的实现必须借助机器人的用户坐标系,即机器人在用户坐标系下走绝对位置运动。
具体实现由以下几个步骤组成。
首先,用step机器人三点法示教出一个固定用户坐标系。
用户坐标系的原点根据实际情况而定,一般选择流水线上一个固定位置参考点,该参考点要方便相机进行坐标转化标定。
关于用户坐标系的标定,可参见新时达机器人操作使用说明书;其次,进行相机坐标与实际位置坐标的标定转换。
在完成第一步中的固定用户坐标系标定后,在该坐标系下选取工件上的三点,计算出这三点在用户坐标系的X、Y值(该步骤可通过机器人协助示教获得在用户坐标系下的位姿值)。
在图像输入的“校准”模块中,按照2.1中的步骤完成相机坐标与实际位置坐标的校准参数制作转换;最后,机器人实现绝对位置运动。
在完成第二步后,工件每偏移一点,相机均可计算出其在用户坐标系下新的位置值X、Y和绕Z轴的theta角度值。
这样,只需要在示教器程序中设置抓取运动点参考的坐标系为用户坐标系即可,即RefSys语句下走绝对cpe点。
该cpe点是codesys里直接读取的相机返回值。
2.3相对坐标实现相对坐标的实现就比较简单,只需要将相机坐标转换为实际位置坐标即可。
在工件上选取三个特征点,用带尖机器人示教出这三点在机器人基坐标系下的坐标值(主要是X和Y)。
按照2.1中的校准流程制作出校准参数。
这样,工件偏移后,相机可以直接计算出其新的坐标X、Y和theta。
需要注意的是,使用相对坐标运动时,相机输出数据必须是相对量,即测量坐标与基准坐标之差,而不是绝对测量坐标。
具体信息见后续章节。
三、示教器示例程序3.1绝对坐标实现例Tool(tool0);//若带工具,则先加载好PTP(ap0); //走到一个安全位置点Lin(cp3);//走到标准抓取位置(工件处于标准位置时机器人的抓取位姿,提前示教好)RefSys(ref1);//切到用户坐标系下WaitTime(uint3);BOOLEXTSet(boolbasepos,TRUE);//端口号为2,发送信号到codesys,读取当前位置作为标准抓取位置WaitTime(uint4);BOOLEXTSet(boolbasepos,FALSE);//关闭该端口/////以上为获得标准抓取位置需要的步骤RefSys(WORLD);PTP(ap0);LP:int0;BOOLEXTSet(boolphoto,TRUE); //发送相机拍照命令,端口号0WaitTime(uint0); //等待PLC处理时间,建议在300ms以上bool0:=BOOLEXTRead(boolenableget); //读取抓取标志位,为TRUE则能抓取BOOLEXTSet(boolphoto,FALSE); //关闭该端口,保证下次为高电平触发IF(bool0=0)THEN //为true则可抓取,否则重新发送拍照命令WaitTime(uint1);GOTO(int0);END_IFRefSys(ref1); //切到用户坐标系下Lin(rcpe0); //走到codesys里输出的绝对位置(外部点形式,端口号0)BOOLEXTSet(boolfinishget,TRUE); //发送抓取完成标志WaitTime(uint2);BOOLEXTSet(boolfinishget,FALSE); //关闭抓取完成标志PTP(ap1);GOTO(int1); //回到循环开始,等待下一个工件3.2相对坐标实现例Tool(tool0);//若带工具,则先加载好PTP(ap0); //走到一个安全位置点Lin(cp3);//走到标准抓取位置(工件处于标准位置时机器人的抓取位姿,提前示教好)WaitTime(uint3);BOOLEXTSet(boolbasepos,TRUE);//端口号为2,读取当前位置作为标准抓取位置WaitTime(uint4);BOOLEXTSet(boolbasepos,FALSE);//关闭该端口/////以上为获得标准抓取位置需要的步骤PTP(ap0);//回到安全点LP:int0;BOOLEXTSet(boolphoto,TRUE); //发送相机拍照命令,端口号0WaitTime(uint0); //等待PLC处理时间,建议在300ms以上bool0:=BOOLEXTRead(boolenableget); //读取抓取标志位,为TRUE则能抓取BOOLEXTSet(boolphoto,FALSE); //关闭该端口,保证下次为高电平触发IF(bool0=0)THEN //为true则可抓取,否则重新发送拍照命令WaitTime(uint1);GOTO(int0);END_IFLin(rcpe1); //走到codesys里输出的绝对位置(外部点形式,该位置是机器人当前位置加上相对偏移,端口号1)BOOLEXTSet(boolfinishget,TRUE); //发送抓取完成标志WaitTime(uint2);BOOLEXTSet(boolfinishget,FALSE); //关闭抓取完成标志PTP(ap1);GOTO(int1); //回到循环开始,等待下一个工件四、C odesys逻辑开发4.1Socket通信开发首先,要在codesys上完成socket通讯开发。