车辆系统动力学作业
车辆系统动力学复习题 (2)

《车辆系统动力学》(此复习题覆盖大部分试题。
考试范围以课堂讲授内容为准。
) 一、概念题1. 约束和约束方程(19)力学系统在运动时会受到某些几何和运动学特性的限制,这些构成限制条件的物体称为约束。
用数学方程表示的约束关系称为约束方程。
2. 完整约束和非完整约束(19)如果系统约束方程仅是系统位形和时间的解析方程,则这种约束称为完整约束;如果约束方程不仅包括系统的位形,还包括广义坐标对时间的倒数或者广义坐标的微分,而且不能通过积分使之转化为包括位形和时间的完整约束方程,则这种约束就称为非完整约束。
3. 轮胎侧偏角(31)车轮回转平面与车轮中心运动方向的夹角。
4. 轮胎径向变形(31)定义为无负载时的轮胎半径rt 与负载时的轮胎半径rtf 之差。
5. 轮胎的滚动阻力系数(40)相应载荷下的滚动阻力与轮胎垂直载荷的比值。
6. 轮胎驱动力系数(50)轮胎驱动力系数定义为驱动力与法向力的比值 7. 边界层(70)当流体绕物体流动时,在物体壁面附近受流体粘性影响显著的薄层称为边界层。
8. 压力系数(74)假设车身某点压力p 、速度v ,来流压力p ∞、速度v ∞,定义压力系数21⎪⎪⎭⎫ ⎝⎛-==∞∞∞v v q p-p C p9. 风洞的堵塞比(77)车辆迎风面积和风洞送风横断面面积的关系(堵塞比) 10. 雷诺数(79)雷诺数定义为气流速度v 、流体特性长度L 的乘积与流体运动粘度ν的比值。
Re=vL/ν 11. 空气阻力系数(82-83)q /A F Aq F C D D D ==Fd 为空气阻力,A 为参考面积,通常采用汽车迎风面积,q 为动压力12. 旋转质量换算系数(88)12dv ii +=r m Θδ 其中 )(Ti c e 2g 20dr 20w i ΘΘΘi i Θi ΘΘ++++=为等效转动惯量。
mv 是整车整备质量,rd 为驱动轮的滚动半径。
13. 后备驱动力(92)车辆行驶时实际需要的驱动力FDem 与车辆所能提供的最大驱动力Fx 的差值。
《车辆动力学》练习册及答案

车辆运动力学系题解答一、填空(每题1分共10分)1常把轨道不平顺分为轨距、(水平)、高低和方向等四种不平顺。
P1662铁路技术管理规程规定,两股钢轨在正线及到发线上在同一处的高差不应超过(4mm ),在其它线上不应超过6mm。
P1673如果减载的车轮上又有很大的横向力使轮缘贴靠钢轨,在最不利的条件下可能引起(爬轨)、脱轨事故p1674在直线上名义轨距为(1435mm );在曲线上根据曲线半径值对轨距加宽。
P1675车轮的偏心和不均重,都会引起轮轨之间的动作用,(车辆运行速度越高),则引起的轮轨相互作用力越大。
P1686车轮踏面存在擦伤时,车轮滚过擦伤处,(轮轨间发生冲击),钢轨受到一个向下的冲量,而车轮受到一个向上的冲量。
P1687轮对沿轨道运行时左右两轮的(转速相同),半径大的车轮经历的距离长,半径小的车轮经历的距离短,p1698车轮半径越大、(踏面斜度越小),则轮对蛇行运动波长越长,即蛇行运动越平缓。
P1709簧上质量与轮对之间不同的(弹性悬挂装置)可以代表实际车辆上不同的悬挂装置。
P17010在车辆转向架设计中,往往把车辆悬挂的(静挠度大小)作为一项重要技术指标。
P17311悬挂静挠度越大,(车辆自振频率低),在轮轨冲击力作用下,振动比较缓慢,加速度也小。
P17312车辆转向架上采用的减震器品种很多,(线性减震器)是一种理想的减震器。
P17313线性减震器产生的阻力与减震器活塞位移速度成正比,(阻力的方向)与运动方向相反。
P17314根据能量守恒原理,在一定时间范围内,(系统内部能量)的变化量应当等于作用在系统上所有外力在同一时间范围内所作的功。
P17915车辆受钢轨接头处冲击後的(强迫振动),实质上是有初速度的自由振动,p18216车辆强迫振动的频率、(振幅以及振动的形式)、不仅与车辆本身的结构有关,而且与线路的不平顺特点、轮轨相互作用关系以及车辆的运动速度有关。
P18317车辆各基本部件之间有(弹性约束)或刚性约束,以限制结构中各部件之间的相对运动。
北京科技大学-申焱华-车辆系统动力学-作业三-油气悬架

北京科技大学机械工程学院车辆工程系作业:取载重130吨矿用汽车的前油气悬挂为研究对象,车辆从空载静平衡位置缓慢加载到满载静平衡位置时悬挂行程x0 = 90 mm;空载载荷16800 kg;满载载荷30890 kg;活塞杆直径为350 mm。
设悬挂缸活塞直径和活塞杆直径同时变化,每次变化量为20 mm,仿真参数如表3所示。
表悬挂活塞、活塞杆直径同时变化仿真参数的设定活塞直径(mm)420 400 380 360 340活塞杆直径(mm)370 350 330 310 290阻尼孔直径(mm)9.24 9 8.76 8.5 8.25充气压力(Mpa) 1.53 1.71 1.93 2.18 2.49充气体积(L)21.2 18.9 16.9 14.8 13.01)求取上述表中油气悬挂缸的刚度与阻尼值。
(可绘制刚度、阻尼随行程的曲线)2)分析悬挂活塞、活塞杆直径变化对油气悬挂输出力的影响。
相关资料:工作原理是:在车重的作用下,油气悬架中的惰性气体都处于压缩状态。
车辆在不平路面的激励下,活塞杆和活塞组件1 相对于缸筒4 作往复运动,被压缩的惰性气体作为系统的弹性组件,来缓解地面通过车轮和车轴传来的振动和冲击,而油液流过阻尼孔2和单向阀3产生阻尼作用,来衰减车身的振动。
当悬架处于压缩行程时,Ⅰ腔的压力升高,Ⅱ腔的压力降低,Ⅰ腔的压力高于Ⅱ腔的压力,Ⅰ腔的油液同时通过阻尼孔2和单向阀流3向Ⅱ腔,产生较小的阻尼力,主要依靠气体的弹性作用来抑制缸筒和活塞杆的相对运动;当悬架处于伸张行程时,Ⅰ腔的压力降低,Ⅱ腔的压力升高,Ⅱ腔的压力高于Ⅰ腔的压力,Ⅱ腔的油液只通过阻尼孔流向Ⅰ腔,产生较大的阻尼力,以便迅速衰减运动。
油气悬挂在受到外部激励时,活塞杆及活塞组件和缸筒之间要产生相对运动。
由上图悬架的物理模型,可以求出气体弹簧刚度和小孔阻尼力 (1)气体弹簧刚度 活塞杆输出力方程为2211A P A P F -= (1)气体状态方程为γγPV V P =00 (2)气体体积V 与缸筒相对于活塞的位移x 的关系为()x A A V V 210--= (3)在静平衡状态下()[]γγx A A V V P P 21000--=(4)悬架弹力表达式为()()[]γγx A A V A A V P F 2102100---=(5)弹力对位移x 求导,得出悬架刚度表达式(6)以上公式中,0P 、0V 分别是悬架初始状态的压强和气体体积;P 、V 分别是任意时刻的压强和气体体积;γ为气体多变指数,计算静刚度时1=γ,计算动刚度时4.1=γ,在实际情况中取值为4.12.1-=γ之间。
车辆系统动力学第二次作业
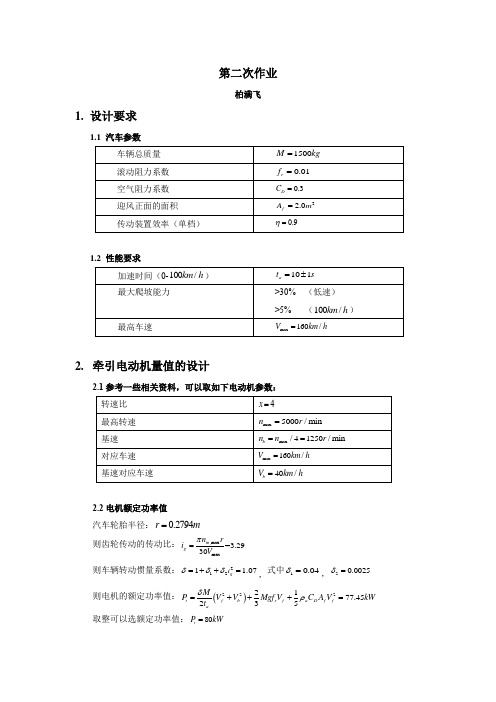
第二次作业柏满飞1. 设计要求1.1 汽车参数1.2 性能要求2. 牵引电动机量值的设计2.1参考一些相关资料,可以取如下电动机参数:2.2电机额定功率值汽车轮胎半径:0.2794r m = 则齿轮传动的传动比:,max max=3.2930m g n ri V π=则车辆转动惯量系数:2121 1.07g i δδδ=++=,式中10.04δ=,20.0025δ=则电机的额定功率值:()2222177.45235t fb r f a D f f aMP VV Mgf V C A V kW t δρ=+++= 取整可以选额定功率值:80t P kW =2.3电机外特性曲线由以上参数得该电机的外特性曲线如图2.1所示。
图 2.1 电机外特性曲线3. 加速性能的检验基于牵引电机的转矩-转速特性、齿轮传动比以及车辆的参数,可以计算车辆的加速性能即加速时间和距离与车速之间的对应关系。
计算0100/km h -加速时间:100210.2112a p g r a D f M t dV sT i MGf C A V rδηρ==--⎰满足性能要求。
4. 爬坡能力的检验应用电机的转矩-转速特性、齿轮传动比,以及车辆的参数,并由行驶过程中汽车驱动力和阻力关系式:p g t T i F rη=()21cos sin 2r r a D f F Mg f C A V ααρ=++由此可计算得出牵引力和阻力与车速之间的关系,如图4.1所示。
从而可计算出车辆的爬坡能力。
图 4.1 不同坡度下牵引力与车速之间的关系图 4.2 爬坡能力与车速之间的关系根据图4.1和4.2,车辆在100/km h的速度行驶时可以有15%左右的爬坡能力,低速时有43%左右的爬坡能力,符合设计要求。
5. 发动机/发电机量值的设计这里发动机额定功率的设计要求能够承载车辆在平坦路面上,以高速公路的最高速度130/km h行驶的需要。
km h的恒定行驶速度下,考虑传动装置(效率为90%)、电动机(效率为图5.1表明在130/90%)以及发电机(效率为85%),所需发动机的功率为32.5kW。
(完整word版)车辆系统动力学试卷

1、系统动力学有哪三个研究内容?(1)优化:已知输入和设计系统的特性,使得它的输出满足一定的要求,可称为系统的设计,即所谓优化。
就是把一定的输入通过选择系统的特性成为最优化的输出。
(2)系统识别:已知输入和输出来研究系统的特性。
(3) 环境预测。
已知系统的特性和输出来研究输入则称为环境预测。
例如对一振动已知的汽车,测定它在某一路面上行驶时所得的振动响应值(如车身上的振动加速度),则可以判断路面对汽车的输入特性,从而了解到路面的不平特性。
车辆系统动力学研究的内容是什么?(1)路面特性分析、环境分析及环境与路面对车辆的作用;(2)车辆系统及其部件的运动学和动力学;车辆内各子系统的相互作用;(3)车辆系统最佳控制和最佳使用;(4)车辆—人系统的相互匹配和模型研究、驾驶员模型、人机工程等。
2、车辆建模的目的是什么?(1)描述车辆的动力学特性;(2)预测车辆性能并由此产生一个最佳设计方案;(3)解释现有设计中存在的问题,并找出解决方案.车辆系统动力学涉及哪些理论基础?(1)汽车构造(2)汽车理论(3)汽车动力学(4)信号与系统在“时间域”及“频率域"下研究时间函数x(t)及离散序列x(n)及系统特性的各种描述方式,并研究激励信号通过系统时所获得的响应.(5)自动控制理论(6)系统辨识(7)随机振动分析研究随机振动中物理量的描述方法(相关函数、功率谱密度),讨论受随机激励的振动系统的激励、系统特性、响应三者统计规律性之间的关系.(8)多体系统动力学建立车辆系统动态模型的方法主要有哪几种?数学模型(1)各种数学方程式:微分方程式,差分方程,状态方程,传递函数等.(2)用数字和逻辑符号建立符号模型-方框图。
3、路面不平度功率谱密度的表达式有几种?各有何特点?试举出2种以上路面随机激励方法,并说明其特点。
(10分)路面功率谱密度的表达形式分为幂函数和有理函数两种(1)路面不平度的幂函数功率谱密度ISO/DIS8608和国家标准GB7031-1987《车辆振动输入路面平度表示方法》中建议采用垂直位移单边功率谱密度来描述路面平度的统计特性:式中:n为空间频率,是波长的倒数,表示每米长度上变化的次数,;为参考空间频率,=0。
汽车系统动力学试卷(大全5篇)
汽车系统动力学试卷(大全5篇)第一篇:汽车系统动力学试卷考试内容:1汽车系统动力学的研究范围、研究方法、特点及发展趋势。
2.轮胎侧偏动力学。
掌握轮胎侧偏特性的定义、影响因素、模型类型,能够建立轮胎侧偏特性简化理论模型。
3.汽车前轮转向和四轮转向动力学。
对于前轮转向汽车,能够推导其数学模型,掌握表征汽车稳态响应的参数及影响因素,瞬态响应和频率响应特性的分析;对于四轮转向汽车,能够推导其数学模型,掌握汽车四轮转向系统的控制方法。
4.驾驶员汽车闭环系统动力学。
掌握驾驶员模型类型,闭环系统研究特点。
5.悬架系统动力学。
掌握悬架的分类、特点、评价指标,被动悬架、主动悬架系统模型的建立,悬架系统特性分析。
6.控制技术在汽车系统动力学研究中的应用。
了解PID控制、最优控制、自适应控制、模糊控制、神经网络控制等技术在汽车系统动力学研究中的应用。
第二篇:汽车系统动力学1、全主动悬架和半主动悬架的工作原理及评价指标半主动悬架就是指可以根据汽车运行时的振动及工况变化情况,对悬架阻尼参数进行自动调整的悬架系统。
为了减少执行元件所需的功率,一般都采用调节减振器的阻尼,使阻尼系数在几毫秒内由最小变至最大,使汽车振动频率被控制在理想的范围内。
半主动悬架为无源控制,在汽车转向、起步及制动等工况时,不能对悬架的刚度和阻尼进行有效的控制。
全主动悬架简称主动悬架,是一种有源控制悬架,所以它包括有提供能量的设备和可控制作用力的附加装置。
它可根据汽车载质量、路面状况(振动情况),行驶速度、起动、制动、转向等工况变化时,自动调整悬架的刚度和阻尼以及车身高度,从而能同时满足汽车行驶平顺性和稳定性等各方面的要求。
其评价指标有悬架动行程、轮胎动载荷、车身加速度。
2、什么是系统动力学,系统动力学研究的内容是什么?系统动力学是一门分析研究信息反馈系统的学科,也是一门认识系统问题和解决系统问题的交叉综合学科。
汽车系统动力学研究所有与车辆系统运动有关的学科,包括空气动力学,纵向运动及其子系统的动力学响应,垂向和横向两个方面的动力学内容,既行驶动力学和操纵动力学,行驶动力学主要研究由路面的不平激励,通过悬架和轮胎垂向力引起的车身跳动和俯仰以及车轮的运动,操纵动力学研究车辆的操纵特性,主要与轮胎侧向力有关,并由此引起车辆侧滑、横摆和侧倾运动。
汽车系统动力学习题答案
汽车系统动⼒学习题答案1.汽车系统动⼒学发展趋势随着汽车⼯业的飞速发展,⼈们对汽车的舒适性、可靠性以及安全性也提出越来越⾼的要求,这些要求的实现都与汽车系统动⼒学相关。
汽车系统动⼒学是研究所有与汽车系统运动有关的学科,它涉及的范围较⼴,除了影响车辆纵向运动及其⼦系统的动⼒学响应,还有车辆在垂向和横向两个⽅⾯的动⼒学内容,随着多体动⼒学的发展及计算机技术的发展,使汽车系统动⼒学成为汽车CAE技术的重要组成部分,并逐渐朝着与电⼦和液压控制、有限元分析技术集成的⽅向发展,主要有三个⼤的发展⽅向:(1)车辆主动控制车辆控制系统的构成都将包括三⼤组成部分,即控制算法、传感器技术和执⾏机构的开发。
⽽控制系统的关键,控制律则需要控制理论与车辆动⼒学的紧密结合。
(2)多体系统动⼒学多体系统动⼒学的基本⽅法是,⾸先对⼀个由不同质量和⼏何尺⼨组成的系统施加⼀些不同类型的连接元件,从⽽建⽴起⼀个具有合适⾃由度的模型;然后,软件包会⾃动产⽣相应的时域⾮线性⽅程,并在给定的系统输⼊下进⾏求解。
汽车是⼀个⾮常庞⼤的⾮线性系统,其动⼒学的分析研究需要依靠多体动⼒学的辅助。
(3)“⼈—车—路”闭环系统和主观与客观的评价采⽤⼈—车闭环系统是未来汽车系统动⼒学研究的趋势。
作为驾驶者,⼈既起着控制器的作⽤,⼜是汽车系统品质的最终评价者。
假如表达驾驶员驾驶特性的驾驶员模型问题得到解决后,“开环评价”与“闭环评价”的价值差别也许就不存在了。
因此,在⼈—车闭环系统中的驾驶员模型研究,也是今后汽车系统动⼒学研究的难题和挑战之⼀。
除驾驶员模型的不确定因素外,就车辆本⾝的⼀些动⼒学问题也未必能完全通过建模来解决。
⽬前,⼈们对车辆性能的客观测量和主观之间的复杂关系还缺乏了解,⽽车辆的最终⽤户是⼈。
因此,对车辆系统动⼒学研究者⽽⾔,今后⼀个重要的研究领域可能会是对主观评价与客观评价关系的认识2.⽬前汽车系统动⼒学的研究现状汽车系统动⼒学研究内容范围很⼴,包括车辆纵向运动及其⼦系统的动⼒学响应,还有车辆垂向和横向动⼒学内容。
汽车系统动力学范文

汽车系统动力学范文汽车系统动力学涵盖了车辆的各个方面。
首先是动力学性能。
这包括加速度、最高时速、制动距离等指标的研究。
汽车的动力学性能直接影响了车辆的加速、刹车等操作。
了解车辆的动力学性能有助于驾驶员更好地控制汽车,确保行车安全。
例如,在紧急情况下,了解汽车的制动性能可以帮助驾驶员更好地应对突发情况,避免碰撞事故的发生。
其次是操纵性能。
汽车的操纵性能包括转弯半径、转向灵活度等指标的研究。
汽车的操纵性能直接关系到驾驶员对车辆的操控。
了解车辆的操纵性能可以帮助驾驶员更好地预判并应对道路情况,避免车辆失控。
例如,在急转弯的情况下,了解车辆的操纵性能可以帮助驾驶员更好地判断车辆的转向灵活度,减少侧滑的风险。
最后是舒适性能。
舒适性是指车辆在行驶过程中给驾驶员和乘客带来的舒适感。
车辆的舒适性能包括悬挂系统、座椅、噪音和振动等方面的研究。
了解车辆的舒适性能可以帮助车辆设计师设计出更加舒适的座椅和悬挂系统,提供更好的乘坐体验。
同时,减少噪音和振动有助于提高驾驶员的专注力和乘车的舒适度。
汽车系统动力学的研究还涉及到其他一些方面。
例如,研究车辆的空气动力学性能有助于提高车辆的油耗和降低风阻;研究车辆的碰撞安全性能有助于设计更安全的车身结构;研究车辆的轮胎性能有助于提高车辆的抓地力和操纵性能等等。
总的来说,汽车系统动力学是一门综合性的学科,涉及到车辆设计、驾驶、行车安全等方方面面。
了解汽车系统动力学对于提高车辆的性能、安全性和舒适性都有着重要的作用。
通过不断地研究和创新,汽车制造商可以不断提高汽车的动力学性能,提高驾驶员和乘客的行车体验。
同时,驾驶员也应该了解汽车的动力学性能,掌握正确的驾驶技巧,保证行车安全。
最新铁道车辆系统动力学作业及试题答案
作业题1、车辆动力学的具体内容是研究车辆及其主要零部件在各种运用情况下,特别是在高速运行时的位移、加速度和由此而产生的动作用力。
2、车辆系统动力学目的在于解决下列主要问题:①确定车辆在线路上安全运行的条件;②研究车辆悬挂装置和牵引缓冲装置的结构、参数和性能对振动及动载荷传递的影响,并为这些装置提供设计依据,以保证车辆高速、安全和平稳地运行;③确定动载荷的特征,为计算车辆动作用力提供依据。
3、铁路车辆在线路上运行时,构成一个极其复杂的具有多自由度的振动系统。
4、动力学性能归根结底都是车辆运行过程中的振动性能。
5、线路不平顺不是一个确定量,它因时因地而有不同值,它的变化规律是随机的,具有统计规律,因而称为随机不平顺。
(1)水平不平顺;(2)轨距不平顺;(3)高低不平顺;(4)方向不平顺。
6、车轮半径越大、踏面斜度越小,蛇行运动的波长越长,即蛇行运动越平缓。
7、自由振动的振幅,振幅大小取决于车辆振动的初始条件:初始位移和初始速度(振动频率)。
8、转向架设计中,往往把车辆悬挂的静挠度大小作为一项重要技术指标。
9、具有变摩擦减振器的车辆,当振动停止时车体的停止位置不是一个点,而是一个停滞区。
10、在无阻尼的情况下共振时振幅随着时间增加,共振时间越长,车辆的振幅也越来越大,一直到弹簧全压缩和产生刚性冲击。
11、出现共振时的车辆运行速度称为共振临界速度12、在车辆设计时一定要尽可能避免激振频率与自振频率接近,避免出现共振。
13、弹簧簧条之间要留较大的间距以避免在振动过程中簧条接触而出现刚性冲击14、两线完全重叠时,摩擦阻力功与激振力功在任何振幅条件下均相等。
15、在机车车辆动力学研究中,把车体、转向架构架(侧架)、轮对等基本部件近似地视为刚性体,只有在研究车辆各部件的结构弹性振动时,才把他们视为弹性体。
16、簧上质量:车辆支持在弹性元件上的零部件,车体(包括载重)及摇枕质量17、簧下质量:车辆中与钢轨直接刚性接触的质量,如轮对、轴箱装置和侧架,客车转向架构架,一般是簧上质量。
汽车动力性作业

汽车动力性作业1、确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中一钟进行整车性能计算):①. 绘制汽车驱动力与行驶阻力平衡图。
②. 求汽车最高车速、最大爬坡度及克服该坡度时相应的附着率。
③. 绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用II 挡起步加速行驶至70km/h 的车速-时间曲线,用计算机求汽车用II 挡起步加速行驶至70km/h 的加速时间。
轻型货车的有关数据如表1所示:表1 轻型货车相关数据序号 内容数值 单位 1 发动机的最低转速min n 600 /min r 2 发动机的最高转速max n4000/min r3 装载质量 2000 kg4 整车整备质量 1800 kg5 总质量 3880 kg6 车轮半径 0.367 m 7 传动系机械效率T η 0.85 N/A8 滚动阻力系数f 0.013 N/A9 空气阻力系数×迎风面积D C A 2.77 2m10 主减速器传动比0i 5.83 N/A 11 飞轮转动惯量f I 0.218 2kg m ⋅ 12 二前轮转动惯量1w I 1.798 2kg m ⋅13 四后轮转动惯量2w I 3.5982kg m ⋅14 变速器传动比g i见表2 N/A15 轴距L 3.2 m16 质心至前轴的距离(满载)a 1.947m17 质心高(满载)g h0.9 m汽油发动机使用外特性的q T n −曲线的拟合公式为:23419.313295.27()165.44()40.874( 3.8445()1000100010001000q n n n n T =−+−+− 式中,q T 为发动机转矩()N m ⋅;n 为发动机转速(/min)r 。
表2 变速器传动比I 挡 II 挡 III 挡 IV 挡V 挡四档变速器 6.09 3.09 1.71 1.00 - 五档变速器 5.56 2.769 1.644 1.00 0.7932、提交物及要求z 计算分析报告电子版本和打印版本各1份z 提交包含详细程序说明的源程序一份(包括使用的软件及版本说明等),并保证可运行。
车辆系统动力学作业

车辆系统动力学作业作业题目:一、垂直动力学部分以车辆整车模型为基础,建立车辆1/4模型,并利用模型参数进行:1)车身位移、加速度传递特性分析; 2)车轮动载荷传递特性分析; 3)悬架动挠度传递特性分析;4)在典型路面车身加速度的功率谱密度函数计算; 5)在典型路面车轮动载荷的功率谱密度函数计算; 6)在典型路面车辆行驶平顺性分析; 7)在典型路面车辆行驶安全性分析;8)在典型路面行驶速度对车辆行驶平顺性的影响计算分析; 9)在典型路面行驶速度对车辆行驶安全性的影响计算分析。
模型参数为:m 1 = 25 kg ;k 1 = 170000 N/m ;m 2 = 330 kg ;k 2 = 13000 (N/m);d 2 =1000Ns/m二、横向动力学部分以车辆整车模型为基础,建立二自由度轿车模型,并利用二自由度模型分析计算: 1) 汽车的稳态转向特性; 2) 汽车的瞬态转向特性;3)若驾驶员以最低速沿圆周行驶,转向盘转角0sw δ,随着车速的提高,转向盘转角位sw δ,试由20sw sw u δδ-曲线和0sw y sw a δδ-曲线分析汽车的转向特性。
模型的有关参数如下:总质量 1818.2m k g = 绕z O 轴转动惯量 23885z I kg m =⋅轴距 3.048L m = 质心至前轴距离 1.463a m = 质心至后轴距离 1.585b m =前轮总侧偏刚度 162618/k N r a d =- 后轮总侧偏刚度 2110185/k Nr a d =- 转向系总传动比 20i =1、建立车辆1/4模型、确定基本参数由题目的已知条件可知,建立一个车辆四分之一模型,该模型为一个双质量系统(图1),其中m 1 = 25 kg ;k 1 = 170000 N/m ;m 2 = 330 kg ;k 2 = 13000 (N/m);d 2 =1000Ns/m 。
图1由车辆1/4模型,可以建立出相关的双质量系统的微分方程: 由振动基础理论知识可知无耦合无阻尼固有圆频率 车轮(1m ): 1211m k k v +=车身(2m ): 222m k v =车身衰减常数2σ:2222m d =σ 由车身无阻尼固有圆频率2v 和车身衰减常数2σ可得车身有阻尼固有圆频率2d v :)()()()(1221222211112212211{=-+-+=+----z z k z z d z m hk z k z z k z z d z m22222σ-=v v d激励的激振频率为πω2/=f 。
(完整版)车辆动力学练习题及参考答案
车辆动力学练习题一、单项选择题1.轨道车辆通常由()、驱动部、走行部、制动部与连接部等组成。
A.车体B.转向架C.轮对D.电动机2. EDS型磁悬浮的悬浮高度一般为()mm,因而对轨道精度和维护要求相对不高。
A.10 B.30C.100 D.503. 铁道车辆的()是指车辆每一根轮轴能够承受的允许静载。
A.轴重 B.额定载重 C.轮对重 D.车体重4.车轮必须具有(),以引导车轮沿道岔形成的线路方向运行,并产生变道时所需的横向导向力。
A.轮缘 B.踏面C.缓冲装置 D.车轴5.铁路轨道可以分为()轨道和曲线轨道。
A.缓和曲线B.坡度C.直线 D.圆曲线6.人对频率在()Hz以下的横向振动最敏感。
A.1 B.2C.5 D.107.轨道车辆的轮对由左右轮子和车轴固接组成,左右轮对滚动角速度一致,则称为()轮对。
A.弹性 B.普通C.刚性 D.磁悬浮8.轮轨蠕滑是指具有弹性的钢质车轮在弹性的钢轨上以一定速度滚动时,在车轮与钢轨的()间产生相对微小滑动。
A.上方B.下方C.侧面D.接触面9.稳定性的含义包含静态平衡稳定性和()稳定性两大类。
A.动态B.准静态C.安全D.非平衡10.目前国内外最常用的轨道不平顺数值模拟方法主要有()、三角级数法和白噪声滤波法等。
A.二次滤波法 B.五次滤波法C.四次滤波法D.三次滤波法11.轨道交通车辆使用的轮胎一般是高压充气轮胎,轮胎内压力高达()kPa。
A.200~300 B.400~500C.600~700 D.800~90012.创造了581km/h的世界轨道交通列车的最高速度记录的是()超导磁浮。
A.中国 B.美国C.日本 D.德国13. 铁路轨道按轨枕使用材料可分为()轨道和混凝土轨枕轨道A.铁枕 B.木枕 C.铜枕 D.不锈钢14. 轮胎式轨道车辆在采用轮胎导向时,转向架上的左右导向轮胎( )布置。
A .横向B .纵向C .垂向D .斜向15.我国( )有世界上第一条投入商业运营的磁悬浮轨道交通线。
车辆系统动力学试题及答案
西南交通大学研究生2009-2010学年第( 2 )学期考试试卷课程代码 M01206 课程名称 车辆系统动力学 考试时间 120 分钟阅卷教师签字:答题时注意:各题注明题号,写在答题纸上(包括填空题)一. 填空题(每空2分,共40分)1.Sperling 以 频率与幅值的函数 ,而ISO 以 频率与加速度的函数 评定车辆的平稳性指标。
2.在轮轨间_蠕滑力的_作用下,车辆运行到某一临界速度时会产生失稳的_自激振动_即蛇行运动。
3.车辆运行时,在转向架个别车轮严重减重情况下可能导致车辆 脱轨 ,而车辆一侧全部车轮严重 减重情况下可能导致车辆 倾覆 。
4.在车体的六个自由度中,横向运动是指车体的横移、 侧滚 和 摇头 。
5.在卡尔克线性蠕滑理论中,横向蠕滑力与 横向 蠕滑率和 自旋 蠕滑率呈相关。
6.设具有锥形踏面的轮对的轮重为W ,近似计算轮对重力刚度还需要轮对的 接触角λ 和 名义滚动圆距离之半b 两个参数。
7.转向架轮对与构架之间的 横向定位刚度 和 纵向定位刚度 两个参数对车辆蛇行运动稳定性影 响较大。
8. 纯滚线距圆曲线中心线的距离与车轮 的_曲率_成反比、与曲线的_曲率_成正比。
9.径向转向架克服了一般转向架 抗蛇行运动 和 曲线通过 对转向架参数要求的矛盾。
10.如果两辆同型车以某一相对速度冲击时其最大纵向力为F ,则一辆该型车以相同速度与装有相同缓冲器的止冲墩冲击时的最大纵向力为_21/2F _,与不装缓冲器的止冲墩冲击时的最大纵向力为_2F_。
院 系 学 号 姓 名密封装订线 密封装订线 密封装订线共2页 第1页5.什么是稳定的极限环?极限环附近的内部和外部都收敛于该极限环,则称该极限环为稳定的极限环。
6.轨道不平顺有几种?各自对车辆的哪些振动起主要作用?方向、轨距、高低(垂向)、水平不平顺。
方向不平顺引起车辆的侧滚和左右摇摆。
轨距不平顺对轮轨磨耗、车辆运行稳定性和安全性有一定影响。
汽车系统动力学作业

汽车系统动力学1.三自由度振动模型如图所示,模型参数:m=690kg ,Iy=1222kg ·m2, a=1.25m,b=1.51m,Ls=0.4m,Kf=17000N/m,Kr=22000N/m,ms=70Kg,Ks=24850N/m,Cf=1500N ·s/m, Cr=790N ·s/m, Cs=1500 N ·s/m 。
计算汽车以u=20m/s 车速在B 级路面上行驶时人体受到的垂直加速度均方根值(计算频率范围0.1~36HZ )。
解:设座椅处的垂直位移为Z s ,车身质心处的垂直位移为Z f ,角位移为θf 。
建立三自由度振动方程为:s Z [Z (Z )][Z (Z )]0s s s s f s f s f s f m k L c L θθ+--+--=s Z [Z ][Z ][Z ][Z ][Z (Z )][Z (Z )]0f f f f f f f f f r f f r r f f r s s f s f s f s f m k a q c a q k b q c b q k L c L m θθθθθθ+--+--++-++-------= s [Z ][Z ][Z ][Z ][Z (Z )][Z (Z )]0f f f f f f f f f f r f f r r f f r s s f s f s f s f s I k a q a c a q a k b q b c b q b k L b c L m L θθθθθθθ------++-++-+--+--=整理为矩阵形式如下:s 2222200Z Z 00Z Z 00s s s ss ss ss sf sf r s f r s s f sf r s f r s s f f s sf r s sf r s s f s sf r s sf r m c c c L k k k L m c c c c c a c b c L k k k k k a k b k L I c L c a c b c L c a c b c L k L k a k b k L k a k b k θθ⎧⎫⎧⎫⎡⎤⎡⎤--⎪⎪⎪⎪⎢⎥⎢⎥+-++-+-+-++-+-⎨⎬⎨⎬⎢⎥⎢⎥⎪⎪⎪⎪⎢⎥⎢⎥-+-++-+-++⎣⎦⎣⎦⎩⎭⎩⎭2Z 000000000000s f s s f f f f r r f r r f r f r Z L q q c c q k k q c a c b k a k b θ⎡⎤⎧⎫⎢⎥⎪⎪⎨⎬⎢⎥⎪⎪⎢⎥⎣⎦⎩⎭⎡⎤⎡⎤⎧⎫⎧⎫⎢⎥⎢⎥⎪⎪⎪⎪=+⎨⎬⎨⎬⎢⎥⎢⎥⎪⎪⎪⎪⎢⎥⎢⎥--⎩⎭⎩⎭⎣⎦⎣⎦因为()r f t t q q -=Δ,做傅里叶变换得:()()i tr f Q Q e-=ωΔωω,()()i tr f Q Q e-=ωΔωω。
汽车系统动力学作业
一.单轮车辆模型分析
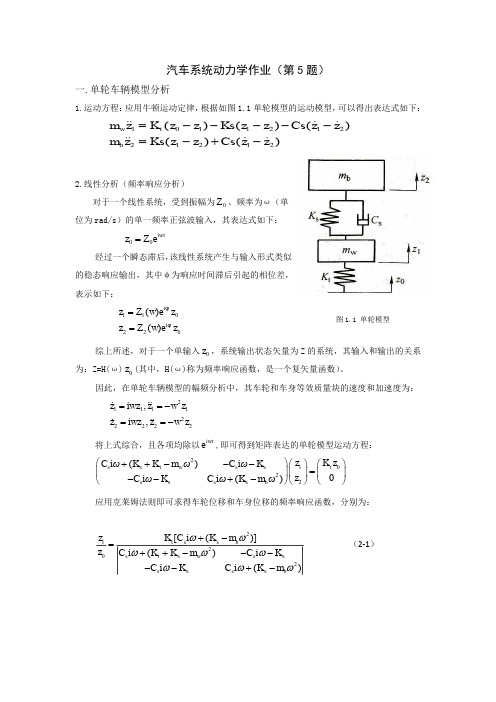
1.运动方程: 应用牛顿运动定律, 根据如图 1.1 单轮模型的运动模型, 可以得出表达式如下:
1 z 2 ) mw z 1 K t ( z0 z1 ) Ks ( z1 z 2 ) Cs ( z 2 Ks ( z1 z 2 ) Cs ( z 1 z 2 ) mb z
3.输出三个指标对路面激励的频率响应函数
1) clear all mb=317.5; mw=45.4; ks=22000; kt=192000; cs=1500; syms f w=sym('2*pi*f'); i=(-1)^0.5; A1=cs*i*w+ks+kt-mw*w^2; A2=-cs*i*w-ks; A3=cs*i*w+(ks-mb*w^2); A4=-cs*i*w-ks; X1=5*10^-5*20^1.5/f^2.5; X2=kt*A3/det([A1,A2;A4,A3]); X3=kt*(-A2)/det([A1,A2;A4,A3]); Gsw=X2-X3; FS=inline(Gsw); f=0:0.01:15; plot(f,abs(FS(f)),'g') ylabel('悬架动行程增益') xlabel('频率/Hz') 2) clear all
elseif f(n)<=4 && f(n)>1 Weight=10^(-0.6+0.2*(f(n)-1)); elseif f(n)<=8 && f(n)>4 Weight=1; else Weight=10^(-0.075*(f(n)-8)); end %Z0=sqrt(G0*u.^(p-1).*0.5.*2/0.5.^p); HZ2a=(-w(n)).^(2).*HZ2; Gaw(n)=abs(HZ2a); Aaw=Weight.*abs(HZ2a)/2; Saw(n)=SIn.*(abs(HZ2a)).^2.*Weight.*0.1; aw=aw+Saw(n); end aw=sqrt(aw) aw = 2.1633
汽车动力学作业答案

第一题:第二题:注意:初始速度V0,可以任意取,初始速度与x轴的夹角可设为45°。
3、在图1所示的系统中,其数学模型为: 0=+'+''kx x b x m 已知质量1=m kg ,阻尼2=b N.sec/m ,弹簧系数100=k N/m ,且质量块的初始位移05.0)0(=x m ,其初始速度0)0(='x m/sec ,要求创建该系统的SIMULINK模型,并进行仿真运行。
图1 弹簧—质量—阻尼系统4、汽车行驶如图7.4.1所示的斜坡上,通过受力分析可知在平行于斜面的方向上有三个力作用于汽车上:发动机的力、空气阻力和重力沿斜面的分量下滑力。
设计汽车控制系统并进行仿真。
由牛顿第二定律,汽车的运动方程为其中m 代表汽车的质量,x 为汽车的位移。
h w e F F F x m --=在实际系统中总会有下界和上界,上界为发动机的最大推动力,下界为刹车时的最大制动力。
空气阻力可以近似为:则下滑力为: 1)用简单的比例控制法来控制车速:()e e desired F K xx =- 其中,e F 为驱动力,desired x 为期望速度值,设为80, 为反馈增益。
50K e =。
仿真时间为1000s.2)用PID 控制来控制车速。
其中:、()()2011.0sin 20001.0t xF w += ()x F h 0001.0sin 30=eK 75,75.0,50===d i p K K K5、一小球在10m高处,以15m/s的速度向上抛出,然后做自由落体运动,当碰到地面后,速度降为碰前的0.8向上回弹,对其运动轨迹和运动速度进行仿真。
⎪⎪⎪⎩⎪⎪⎪⎨⎧-⇒=+=-=+=⎰⎰.8.0,0,)(10)(,81.9,15)(vvhwhendttvthggdttvtt6、二自由度的汽车模型如下:()()()()⎪⎪⎭⎪⎪⎬⎫-++-=-⎥⎦⎤⎢⎣⎡--++=z f z r f z r f f rf r fI aK u I K b K a I bK aK mu K mu bK aK mu K K δγβγδγββ221 其中变量为β、γ,其余为常量见下表。
车辆系统动力学大作业
北京交通大学机械与电子控制工程学院
移 Z w1 (t ) , Z w2 (t ) , Z w3 (t ) , Z w4 (t ) 。为求得以上所有列车运行时的动态参量则需 要对该系统列 10 个微分方程。 由于该系统的动力学模型为二阶线性微分方程组, 很难给出闭式解。因此采用数值计算方法,借助 Matlab 方便的矩阵运算功能给 出系统各参量的数值解。
II
北京交通大学机械与电子控制工程学院
第一章 车辆-轨道耦合动力学模型
1.1 车辆-轨道耦合系统建模
为便于设计及其仿真优化,在车辆-轮轨动力学建模时,考虑将模型合理简 化。 并分别对具有二系悬挂的客车和轮轨之间的激扰进行模型建立。视轮轨激扰 信号为受列车运行速度影响的周期性垂向位移信号,该信号的频率,相位,幅值 应受到轮轨接触条件,列车运行速度的影响。为尽量符合实际车体动力学性能, 将轮对等效为刚体, 并将实际轮对刚度用与之刚度相同的弹簧等效。并按实际值 设置一系、二系弹簧的刚度和阻尼器阻尼值。综上车辆系统垂向,转动动力学模 型可简化为图 1-1。将列车速度、质量参数分别和轮轨激扰频率,幅值进行等效 转化, 用计算机创建带有上述特征信息的轮轨激扰,然后通过输出信号的幅值即 可方便的预测列车在某一工况下运行的平稳性。
figure18plotivv8igridonxlabel时间ntsylabel转动角速度radstitle构架1点头角速度figure19plotivv9igridonxlabel时间ntsylabel转动角速度radstitle构架2点头角速度figure20plotivv10igridonxlabel时间ntsylabel转动角速度radstitle车体点头角速度figure21plotiaa1igridonxlabel时间ntsylabel沉浮加速度ms2title轮对1沉浮加速度figure22plotiaa2igridonxlabel时间ntsylabel沉浮加速度ms2title轮对2沉浮加速度北京交通大学机械与电子控制工程学院19figure23plotiaa3igridonxlabel时间ntsylabel沉浮加速度ms2title轮对3沉浮加速度figure24plotiaa4igridonxlabel时间ntsylabel沉浮加速度ms2title轮对4沉浮加速度figure25plotiaa5igridonxlabel时间ntsylabel沉浮加速度ms2title构架1沉浮加速度
车辆动力学作业
摘要随着科技的发展和进步,人们对汽车的要求不仅局限于代替行走,而且更加注重汽车在行驶过程中的平顺性(舒适性)和安全性(操纵稳定性)。
悬架系统的主要作用是有效地减缓路面不平而引起的车体振动平顺性以及操纵安全性。
因此,悬架系统是提高车辆平顺性和操纵稳定性、减少动载荷引起零部件损坏的关键。
随着汽车性能的不断完善与发展,对悬架也提出了更高的要求。
为了满足现代汽车对悬架提出的各种性能要求,悬架的结构形式一直在不断地更新和完善。
事实上,被动悬架的潜力在目前已接近极限,为了克服传统的被动悬架对汽车性能改善的限制。
近年来,汽车工业中出现的主动悬架成为了一条改善汽车悬架性能的新途径。
本文主要对介绍了悬架的被动控制、半主动控制和主动控制,重点介绍了悬架主动控制的方法来提高行驶平顺性和改善操纵稳定性。
关键词:悬架,平顺性,操纵稳定性,主动悬架,控制系统目录摘要 (I)引言 (1)1. 车辆悬架控制系统的类型 (1)1.1. 被动控制 (1)1.2. 半主动控制 (1)1.3. 主动控制 (2)2. 常用的控制方法 (2)2.1. 天棚阻尼器控制方法 (2)2.2. 自适应与自校正控制方法 (3)2.3. 鲁棒控制方法 (3)2.4. 预见控制方法 (3)2.5. 模糊控制方法 (4)2.6. 神经网络控制方法 (5)3. 结语 (6)4. 参考文献 (6)引言自70年代以来,工业发达国家开始研究基于振动主动控制的主动/半主动悬架系统。
引入主动控制技术后的悬架是一类复杂的非线性机、电、液动力系统,其研究进展和开发应用与机械动力学、流体传动与控制、测控技术、计算机技术、电子技术、材料科学等多个学科的发展紧密相关[1]。
近十年来,这些学科的发展为悬架系统从被动隔振走向振动主动控制奠定了基础。
尤其是信息科学中对模糊理论、人工神经网络、进化计算的研究,在理论上取得引人瞩目进展的同时已开始得以应用,其中包括车辆的减振和牵引。
因此,车辆悬架振动控制系统的研究不仅在理论上和方法上取得了显著的进步,而且也出现了工程实际应用的可能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车辆系统动力学作业课程名称:车辆系统动力学学院名称:汽车学院专业班级:2013级车辆工程(一)班学生姓名:宋攀琨学生学号:30作业题目:一、垂直动力学部分以车辆整车模型为基础,建立车辆1/4模型,并利用模型参数进行: 1) 车身位移、加速度传递特性分析; 2) 车轮动载荷传递特性分析; 3) 悬架动挠度传递特性分析;4) 在典型路面车身加速度的功率谱密度函数计算; 5) 在典型路面车轮动载荷的功率谱密度函数计算; 6) 在典型路面车辆行驶平顺性分析; 7) 在典型路面车辆行驶安全性分析;8) 在典型路面行驶速度对车辆行驶平顺性的影响计算分析; 9) 在典型路面行驶速度对车辆行驶安全性的影响计算分析。
模型参数为:m 1 = 25 kg ;k 1 = 170000 N/m ;m 2 = 330 kg ;k 2 = 13000 (N/m);d 2 =1000Ns/m二、横向动力学部分以车辆整车模型为基础,建立二自由度轿车模型,并利用二自由度模型分析计算: 1) 汽车的稳态转向特性; 2) 汽车的瞬态转向特性;3)若驾驶员以最低速沿圆周行驶,转向盘转角0sw δ,随着车速的提高,转向盘转角位sw δ,试由20sw sw u δδ-曲线和0sw y sw a δδ-曲线分析汽车的转向特性。
模型的有关参数如下:总质量 1818.2m kg = 绕z O 轴转动惯量 23885z I kg m =⋅ 轴距 3.048L m = 质心至前轴距离 1.463a m =质心至后轴距离 1.585b m = 前轮总侧偏刚度 162618/k N rad =- 后轮总侧偏刚度 2110185/k N rad =- 转向系总传动比 20i =1、建立车辆1/4模型、确定基本参数由题目的已知条件可知,建立一个车辆四分之一模型,该模型为一个双质量系统(图1),其中m 1 = 25 kg ;k 1 = 170000 N/m ;m 2 = 330 kg ;k 2 = 13000 (N/m);d 2 =1000Ns/m 。
图1由车辆1/4模型,可以建立出相关的双质量系统的微分方程: 由振动基础理论知识可知无耦合无阻尼固有圆频率 车轮(1m ): 1211m k k v +=车身(2m ): 222m k v =车身衰减常数2σ:2222m d =σ 由车身无阻尼固有圆频率2v 和车身衰减常数2σ可得车身有阻尼固有圆频率2d v :22222σ-=v v d)()()()(1221222211112212211{=-+-+=+----z z k z z d z m hk z k z z k z z d z m &&&&&&&&激励的激振频率为πω2/=f 。
车身位移、加速度传递特性分析由《汽车动力学》B 篇车辆振动可知,常用的激励和扰动函数是简谐函数:)sin(ˆξω+=t hh ω—激振圆频率。
在汽车动力学分析中,通常将简谐激励函数用复数形式表示,以便于求解:t j e hh ωˆ= (1) 式中hˆ为复振幅。
因为在线性系统和简谐扰动的情况下,强迫运动和力也是简谐的,因此,非齐次双质量系统方程组的解可以写成:t j e zz ω11ˆ= (2) t j e zz ω22ˆ= (3) 质量和位移有着和扰动一样的圆频率ω,不同的仅仅是其复振幅。
将式(1),(2),(3)代入到双质量系统方程组中,得:122222221222112221ˆ)(ˆ)(ˆˆ)(ˆ)({z k jd z k jd m h k zkjd z k k jd m +=++-=+-+++-ωωωωωω求解方程组得:ωωω22222221ˆˆjd k jd k m z z+++-= 车轮位移1z 对h 的幅频响应函数为:)(ˆˆ322321122121222222142112212211ωωωωωωωωωd m d m k d j k k k m k m k m m m k jd k k m k h z --++---++-= 车身位移2z 对h 的幅频响应函数为:)(ˆˆ322321122121222222142112212ωωωωωωωωd m d m k d j k k k m k m k m m m k jd k k h z --++---+= 车身位移的传递函数为:32232112212122222214211221)(2s d m s d m s k d k k s k m s k m s k m s m m sk d k k s G z ++++++++=令 212211k k m k A +-=ω ω211d k B = 212122222214211k k k m k m k m m m C +---=ωωωω 322321121ωωωd m d m k d D --=212k k A = ω212d k B = 212122222214212k k k m k m k m m m C +---=ωωωω 322321122ωωωd m d m k d D --= 整理得:j D C j B A h z22222ˆˆ++=(4)对式(4)求模即可得到车身位移的幅频特性即:222222222ˆˆD C B A h z ++= (5)又因为: t j t j e z ez z ωωω2222ˆˆ-==&&&& (6) 同理)(ˆˆ32232112212122222214213122212ωωωωωωωωωd m d m k d j k k k m k m k m m m k jd k k h z --++---+=&& 车身加速度的传递函数为:3223211221212222221421312221)(2s d m s d m s k d k k s k m s k m s k m s m m s k d s k k s G z ++++++++=&& 故,由式(5)、(6)整理可得车身加速度幅频特性:222222222222ˆˆˆˆD C B A hz hz++==ωω&& (7)将已知条件代入式(5),并且激振频率f 取0到10Hz ,通过MATLAB 计算并绘制出车身位移在激振频率为0到10Hz 内的幅频特性曲线(图2)。
图2同理,将已知条件代入式(7)即可得到车身加速度在激振频率f 为0到20Hz 内的幅频特性曲线(图3)。
图32 车轮动载荷传递特性由第一问中二质量系统方程求得车轮位移1z 对h 的幅频响应函数为:)(ˆˆ322321122121222222142112212111ωωωωωωωωωd m d m k d j k k k m k m k m m m k jd k k m k h z --++---++-= 又因为车轮动载荷1d F 与1z 的关系为: )(111h z k F d -= 故车轮动载荷1d F 对h 的幅频响应函数为:)())((ˆ)ˆˆ(ˆˆ32232112212122222214213223212222122212114211111ωωωωωωωωωωωωωωd m d m k d j k k k m k m k m m m d m d m j k m k m k m m k m m k hh z k h F d --++---+++++--=-=同时,车轮动载荷的传递函数为:32232112212122222214213223212222122212114211)()(1s d m s d m s k d k k s k m s k m s k m s m m s d m s d m s k m s k m s k m s m k s m m k s G d F +++++++-----+-=令 )(22221222121142113ωωωωωk m k m k m m k m m k A +++--= )(32232113ωωd m d m k B +=212122222214213k k k m k m k m m m C +---=ωωωω 322321123ωωωd m d m k d D --=整理得: j D C j B A hF d 33331ˆˆ++= 故由上式可得车轮动载荷的幅频特性为:232323231ˆˆD C B A hF d ++= (8) 将已知条件代入式(8)即可得到车车轮动载荷在激振频率f 为0到20Hz 内的幅频特性曲线(图4)。
图43悬架动挠度的传递特性在该二质量系统中,悬架的动挠度12z z f d -=,在前两个已经讨论的问题中,我们已经分别得到1z 和2z 对h 的幅频响应函数,因此代入上述悬架动挠度公式可以得到悬架动挠度的幅频响应函数:)(ˆˆˆˆˆ322321122121222222142122112ωωωωωωωωd m d m k d j k k k m k m k m m m m k hz z h f d--++---=-=同理,悬架动挠度的传递函数为3223211221212222221421221)(s d m s d m s k d k k s k m s k m s k m s m m s m k s G d f +++++++-=悬架动挠度的幅频特性为2121212122222222ˆˆD C B A D C B A hf d++-++= (9)将已知条件代入式(9)即可得到车车轮动载荷在激振频率f 为0到20Hz 内的幅频特性曲线(图5)。
图54典型路面车身加速度的功率谱密度函数计算激励响应功率谱密度函数的推导由《汽车动力学》B 篇第九章内容可得连续路面不平度振幅谱为⎰+∞∞-Ω-ΩΩ=d e hx h x j )(ˆ)(又因为vt x =、Lvv πω2=Ω=(注:Ω—行程圆频率,L —路面谱波长,v —车速) 所以,通过以上式子可求的与时间相关的不平度函数:⎰⎰+∞∞-+∞∞-=Ω=ωωωωωd e h vd e h t h t j t j )(ˆ)(ˆ)( 上式中:)(ˆ1)(ˆΩ=h vhω,且ΩΩ=d h d h )(ˆ)(ˆωω 故车辆对不平度的响应表达式为;ωωωωωωd e h h q d e qt q t j t j )(ˆˆˆ)(ˆ)(⎰⎰∞+∞-∞+∞-⎥⎦⎤⎢⎣⎡== (10) 为了进一步回答舒适性,安全性程度的问题,需要看系统在一个较长的时间间隔内是怎样被激励的,对于一个模型在一个足够长的时间T 来说,其均值⎰=Tdt t q T q 0)(1其均方根值为:)()(1~02有效值eff Tq dt t q Tq==⎰(11)标准差为: dt q t q TT q ⎰-=02])([1σ 将(10)式代入(11)式可得:ωωπd q Tq T 202))(ˆ(4lim ~⎰∞∞→= (12) (12)式中的被积分部分记为 2))(ˆ(4lim)(ωπωq TT q ∞→=Φ )(ωq Φ即为对路面激励响应的功率谱密度函数。