系统辨识研究生期末结课作业-中北大学-余红英老师
基于DSP的运动目标实时检测自适应算法

基于DSP的运动目标实时检测自适应算法高阳;樊永生;余红英;于雅慧【摘要】嵌入式系统中运动目标检测存在噪声影响大、实时性差的问题.采用TI系列的TMS320DM642设计了一种运动目标自适应检测系统.首先计算相邻帧图像差值的熵值,通过三帧差法自适应地提取目标.最后,将该算法移植到了DSP平台.实验结果表明,该算法能有效解决三帧差法中噪声干扰问题,而且实时性好.【期刊名称】《科学技术与工程》【年(卷),期】2014(014)017【总页数】5页(P92-96)【关键词】TMS320DM642;熵值;三帧差;自适应【作者】高阳;樊永生;余红英;于雅慧【作者单位】中北大学计算机与控制工程学院,太原030051;中北大学计算机与控制工程学院,太原030051;中北大学计算机与控制工程学院,太原030051;中北大学计算机与控制工程学院,太原030051【正文语种】中文【中图分类】TP391.41近年来,运动目标的检测已成为模式识别和智能控制领域中一个重要的研究方向。
它主要研究从图像帧中检测到运动目标,能够成功有效地检测到运动目标是进一步处理的重要基础,如人脸识别、行人检测等领域[1]。
目前对运动目标进行检测的算法主要有:背景差分法[2]、帧间差分法[3]、光流法[4]等。
背景差分法的性能依赖于所使用的背景建模技术。
由于场景的复杂性、不可预知性,以及各种环境干扰和噪声的存在,比如光照的突然变化、实际背景图像中有些物体(树叶、水纹)的波动、摄像机的抖动、运动物体进出场景对原场景的影响等,使得背景差分法中背景建模变得十分复杂,因此运算量比较大。
光流法进行运动目标检测需要对每个像素点计算光流,运算量非常大。
所以,背景差分法和光流法都很难用于实际的嵌入式系统中。
帧间差分法可以避免背景差分法中背景建模等复杂的问题。
为了更准确地识别运动目标,研究人员进一步提出了三帧差分算法;但是三帧差分法二值化的时候阈值是根据经验值选定的,所以不能在滤除噪声干扰和保留完整目标轮廓之间选择一个合适的值。
案例教学在专业硕士研究生课程中的应用与实践

的教学质量提到了议事日程。 近几年的专业硕士研究生扩招,加快了案例
教学推广的进程。由于机械工程案例具有复杂、专 业性强等特点,案例库开发难度较大,成功的案例 较少,使得工程硕士研究生的案例教学发展较慢。 随着工程硕士研究生扩招规模扩大,迫切需要通 过案例教学培养研究生发现问题、分析问题、解决 问题的能力,同时培养他们的创新能力、团队合作 能力、表达能力和动手能力。但在案例教学实施过 程中出现了许多误区,有些矛盾亟待解决。本文以 “自动化智能化制造单元与系统实例”的教学实践 为例,针对专业硕士研究生案例教学中出现的问 题,提出化解矛盾的做法。
[文献标识码]A
[文章编号]1674-9324(2021)25-0100-04
[收稿日期]2021-03-15
案例教学源于哈佛大学商学院的案例教学模 式,从法学到商学再到公共管理学专业和社会学 领域,案例教学的范围逐渐扩展,在全世界范围内 享有盛名受到广泛推崇[1-3]。在我国,早期的案例 教学作为师资培训的重要内容,被视为一种有效 的教师教育方法[1]。由于专业学位硕士研究生具 有相对独立的教育模式,具有特定的职业指向性, 是职业性与学术性的高度统一,其特点是以培养 学生的实践能力为核心,强调实践性与应用性[4]。 近年来,案例教学在专业硕士研究生教学中日益 得到重视,并取得显著成果[5,6]。教育部学位与研 究生教育发展中心、全国公共管理专业学位研究 生教育指导委员会高度重视案例教学。2015年,教 育部在借鉴国外先进经验的基础上指出:加强案 例教学是强化专业学位研究生实践能力培养,推 进教学改革,促进教学与实践有机融合的重要途 径,是推动专业学位研究生培养模式改革的重要 手段。2020年9月,教育部、国家发展改革委、财政 部联合发布 《关于加快新时代研究生教育改革发 展的意见》,明确了“立德树人、服务需求、提高质 量、追求卓越”的工作主线,把保证和提高研究生
中北大学图书管理系统
电子与计算机科学技术学院数据结构课程设计需求分析报告项目名称:图书借阅管理系统指导老师:周海英设计人员: 0706054236 周西财日期: 2009年6月17日目录第1节引言 (1)1.1 编写目的 (1)1.2 背景 (1)1.3 参考资料............................................. 错误!未定义书签。
第2节任务概述 (2)2.1 问题定义 (2)2.2 目标 (2)2.2 用户特点 (2)第3节需求规定 (3)3.1 功能需求 (3)3.1.1 功能结构图 (3)3.1.2 输入/输出需求 (3)3.2 性能需求 (3)3.2.1 响应时间 (3)3.2.2 精度需求 (3)3.3 运行环境需求 (4)3.3.1 软件环境 (4)3.3.2 硬件环境 (4)第4节设计人员 (4)4.1 成员任务表 (4)图书借阅管理系统1.引言1.1 编写目的需求的编写是为了研究图书借阅管理系统软件的开发途径和应用方法。
同时它也是进行项目策划、概要设计和详细设计的基础,是维护人员进行内部维护,信息更新,验收和测试的依据。
1.2 背景人工管理图书的手续繁索、效率低下给具有强烈时间观念的管理人员带来了诸多不便,学校图书馆缺少一套完善的图书管理软件,为了对图书的管理方便,因此必须开发图书管理系统。
1.3 参考资料[1]谭浩强编著,《C 语言程序设计》,清华大学出版社,1995年。
[2]秦锋,袁志祥编著,《数据结构例题详解与课程设计指导(c语言版)》中国科学技术大学出版社[3]严蔚敏吴伟民编著,《数据结构(C语言版)》,清华大学出版社,2008年。
2.任务概述2.1问题定义1)图书管理(增加图书、查询图书、删除图书、图书借阅、还书);2)会员管理(增加会员、查询会员、删除会员、结束信息)2.2 任务目标1)实现以上题目要求。
2)根据设计内容建立相关数据的动态链表存储结构。
修订自动检测技术及其应用梁森第二课后标准答案
憾 捧
自
动
检
再如,一台如右图的数字电压表, 其最大显示值 测
为399.9V,最高位只能显示0、1、2、3这四个数字(有 技
时0不予显示),所以它是33/4位表。
术
用普通的3½位DMM测量220V或380V工频
及
电压时,量程必须选择700V AC档;相比之
其
下,使用33/4位的DMM只需选择400V-AC档, 准确度优于700V-AC档,既不欠量程也不超
其
应
用
成
2、有一测量吊车起吊物质量的拉力传感器(吊钩 睁
秤),R1、R2、R3、R4贴在等截面轴上,组成全桥,桥 毯
路电源为直流6V。请画出测量转换电路。
梭
自
动
检
测
技
术
及
其
应
吊钩秤外形
桥路的邻边电阻受力状态必须相反 用
紫
3、有一额定荷重为20KN的等截面空心圆柱式荷重 格
传感器,其灵敏度KF为2mV/V,桥路电压Ui为12V,
落 齐 自 动 检
测
技
术
及
其
出租车计价器外形 电动助动车仪表盘外形 应 用
珐
可参考汽车速度的测量原理
而
厩
袁
自
动
检
测
技
术
及
其
与车轮联动
应
用
磅
自行车速度、里程测量仪表设计注意事项 横
显
1.观察自行车的结构可知,车速及公里数与车轮的直径及 餐
转速成正比,因此应将注意力集中到自行车的前、后轮上。设 车轮的直径为D(m),则周长l=πD,车轮转动的圈数即为自
和先进了。有关计算机测控方面的知识请读者参阅有关资料。
系统辨识研究生期末结课作业-中北大学-余红英老师
BP神经网络(一)定义误差反向传播的BP算法简称BP算法,其基本思想是梯度下降法。
它采用梯度搜索技术,以期使网络的实际输出值与期望输出值的误差均方值为最小。
(二)BP网络特点1)是一种多层网络,包括输入层、隐含层和输出层;2)层与层之间采用全互连方式,同一层神经元之间不连接;3)权值通过δ学习算法进行调节;4)神经元激发函数为S函数;5)学习算法由正向传播和反向传播组成;6)层与层的连接是单向的,信息的传播是双向的。
(三)BP主要应用回归预测(可以进行拟合,数据处理分析,事物预测,控制等)、分类识别(进行类型划分,模式识别等),但无论那种网络,什么方法,解决问题的精确度都无法打到100%的,但并不影响其使用,因为现实中很多复杂的问题,精确的解释是毫无意义的,有意义的解析必定会损失精度。
(四)BP网络各种算法的应用范围1)Traingd:批梯度下降训练函数,沿网络性能参数的负梯度方向调整网络的权值和阈值;2)Traingdm:动量批梯度下降函数,也是一种批处理的前馈神经网络训练方法,不但具有更快的收敛速度,而且引入了一个动量项,有效避免了局部最小问题在网络训练中出现;3)Trainrp:有弹回的BP算法,用于消除梯度模值对网络训练带来的影响,提高训练的速度(主要通过delt_inc和delt_dec来实现权值的改变);4)Trainlm:Levenberg-Marquardt算法,对于中等规模的BP神经网络有最快的收敛速度,是系统默认的算法.由于其避免了直接计算赫赛矩阵,从而减少了训练中的计算量,但需要较大内存量.;5)traincgb:Plwell-Beale算法:通过判断前后梯度的正交性来决定权值和阈值的调整方向是否回到负梯度方向上来;6)trainscg:比例共轭梯度算法:将模值信赖域算法与共轭梯度算法结合起来,减少用于调整方向时搜索网络的时间。
一般来说,traingd和traingdm是普通训练函数,而traingda,traingdx,traingd,trainrp,traincgf,traincgb,trainsc g,trainbgf等等都是快速训练函数.总体感觉就是训练时间的差别比较大,还带有精度的差异。
互动反馈系统IRS在课堂教学中的应用研究以教育传播学为例可编辑

互动反馈系统IRS在课堂教学中的应用研究以《教育传播学》为例分类号密级U D C编号 10736硕士学位论文互动反馈系统(IRS )在课堂教学中的应用研究?? 以《教育传播学》为例硕士研究生:杨冠英指导教师:王卫军副教授专业名称: 教育技术学研究方向: 信息技术与教育二○一三年六月硕士学位论文M.D. Thesis互动反馈系统(IRS )在课堂教学中的应用研究 ??以《教育传播学》为例The Research on Application of Interactive ResponseSystem in Classroom Instruction:take Educational Communication for instance杨冠英Yang Guanying西北师范大学Northwest Normal University二○一三年六月June, 2013西北师范大学研究生学位论文作者信息论文题目姓名学号专业名称答辩日期 E-mail通信地址邮编 : 备注:目录摘要IAbstract II第 1 章引言11.1 研究背景及问题的提出 11.1.1 课程改革的迫切需求11.1.2 学习环境的巨大变革. 21.1.3 传统课堂教学信息反馈存在的问题. 31.2 研究目的和意义61.2.1 研究目的 61.2.2 研究意义 71.3 相关研究综述 81.3.1 互动反馈系统的相关理论研究 81.3.2 互动反馈系统的教学实践研究. 101.4 研究思路与方法 111.4.1 研究思路. 111.4.2 研究方法. 12第 2 章互动反馈系统(IRS )在课堂教学中应用的理论基础13 2.1 相关概念界定132.1.1 互动反馈技术132.1.2 1 ∶1 数字学习132.1.3 互动反馈教学142.2 关于互动反馈系统(IRS ). 142.2.1 IRS 的内涵. 142.2.2 IRS 的技术特性152.2.3 IRS 的教学功能162.3 理论基础. 182.3.1 反馈理念182.3.2 互动理念. 182.3.3 教育传播理论 19第 3 章互动反馈系统(IRS )在课堂教学中的应用实践. 20 3.1 研究设计. 203.1.1 研究目的203.1.2 活动设计203.1.3 资源设计223.2 组织实施. 253.2.1 活动组织253.2.2 活动实施263.2.3 活动总结反思 333.3 调查结果 333.3.1 学习能力的发展333.3.2 学习方式的变化393.3.3 学习态度的转变423.4 小结 47第 4 章互动反馈系统(IRS )在课堂教学中的应用策略. 48 4.1 IRS 的使用策略. 484.1.1 IRS 的阶段使用策略. 484.1.2 信息反馈优化策略. 494.2 IRS 的问题设计策略514.2.1 “激发兴趣、主动参与”的问题设计 524.2.2 “反馈测验、评价调控”的问题设计 534.2.3 “思维引导、构建新知”的问题设计 544.3 IRS 的教学操作策略554.3.1 对于高通过率问题,开展课堂对话 554.3.2 对于中通过率问题,开展课堂辩论 564.3.3 对于低通过率问题,进行分步引导 574.4 IRS 的教学评价策略574.4.1 利用 IRS 测验,开展形成性评价. 584.4.2 利用反馈数据,生成形成性评价. 58第 5 章总结与展望 605.1 研究认识. 605.2 研究不足与进一步研究方向615.2.1 IRS 教学应用方面. 615.2.2 IRS 系统自身技术与功能方面 62参考文献..IV附录VII攻读硕士学位期间的研究成果 VIII后记.IX图目录图 1-1 CATAALYST 的理论模型 8图 1-2 互动反馈系统(IRS )在课堂教学中的应用研究思路及流程图12 图 2-1 IRS 基本体系结构. 15图 3-1 IRS 课堂教学应用实践的活动设计结构图 21图 3-2 必答题中的单选题23图 3-3 必答题中的多选题23图 3-4 抢答题开始界面 24图 3-5 抢权活动开始界面25图 3-6 必答题题干和选项 27图 3-7 学生利用遥控器回答问题 27图 3-8 超过答题规定时间显示“pause ”28图 3-9 IRS 统计显示学生的答题情况28图 3-10 抢答提示画面 29图 3-11 抢答成功后的提示画面29图 3-12 抢权提示画面30图 3-13 抢权成功后的提示画面. 30图 3-14 选择活动模式31图 3-15 淘汰赛开始提示画面32图 3-16 淘汰学生的编号在屏幕下方消失. 32图 3-17 恢复被淘汰学生作答权的提示画面 32图 3-18 被淘汰学生的作答权已恢复33图 3-19 学生在 IRS 课堂中的学习注意力 34图 3-20 学生在 IRS 课堂中的学习理解力 35图 3-21 学生在 IRS 课堂中的学习记忆力 36图 3-22 学生在 IRS 课堂中的学习反思力 37图 3-23 学生对 IRS 课堂中探究学习的认识39图 3-24 学生对 IRS 课堂中自主学习的认识40图 3-25 学生对 IRS 课堂中协作学习的认识41图 3-26 学生对利用 IRS 开展教学的态度 42图 3-27 利用 IRS 开展教学后对《教育传播学》的兴趣 43 图 3-28 学生使用 IRS 开展教学的心理感受44图 3-29 学生对于 IRS 使用方式的认识. 45图 4-1 学生答题各选项统计图 49图 4-2 “激发兴趣、主动参与”的问题 52图 4-3 “反馈测验、评价调控”的问题 53图 4-4 预设的 IRS 问题 54图 4-5 补充选项及统计结果. 54图 4-6 “教育传播环境”的相关测试题及统计结果55图 4-7 “教育传播符号”的相关测试题及统计结果56图 4-8 “教育传播效果”的相关测试题及统计结果57图 4-9 2010 级教育技术学 1 班的活动成绩统计报表. 58图 4-10 “个人成绩追踪表”截图. 59图 4-11 个人历次成绩统计折线图. 59表目录表 1-1 互动反馈技术与认知学习结构模型9表 1-2 本研究中采用的研究方法及用途 12表 3-1 IRS 的教学应用为学生学习带来的变化. 20表 3-2 “教育传播效果”单元的内容分析. 22表 3-3 平时课堂与 IRS 课堂观察表. 39表 3-4 学生的课堂表现 46表 4-1 互动反馈技术对传统课堂中信息反馈的优化. 50摘要本研究以互动反馈系统 (IRS ) 的课堂教学应用为主要研究对象, 以理论指导实践、实践完善理论的方式开展研究。
系统辨识大作业加学习心得
论文系统辨识姿态角控制1.系统辨识概述辨识、状态估计和控制理论是现代控制理论三个相互渗透的领域。
辨识和状态估计离不开控制理论的支持,控制理论的应用又几乎不能没有辨识和状态估计技术。
随着控制过程复杂性的提高,控制理论的应用日益广泛,但其实际应用不能脱离被控对象的数学模型。
然而在大多数情况下,被控对象的数学模型是不知道的,或者在正常运行期间模型的参数可能发生变化,因此利用控制理论去解决实际问题时,首先需要建立被控对象的数学模型。
系统辨识正是适应这一需要而形成的,他是现代控制理论中一个很活跃的分支。
社会科学和自然科学领域已经投入相当多的人力去观察、研究有关的系统辨识问题。
系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。
从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。
辨识问题可以归结为用一个模型来表示可观系统(或将要改造的系统)本质特征的一种演算,并用这个模型吧对客观系统的理解表示成有用的形式。
当然可以刻有另外的描述,辨识有三个要素:数据,模型类和准则。
辨识就是按照一个准则在一组模型类中选择一个与数据拟合得最好的模型。
总而言之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合所关心的实际过程的静态或动态特性。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类{}M(即给定一类已知结构的模型),一类输入信号u和等价准则(,)JLyyM(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择是误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识理论及应用(课后题答案第三章3.2、3.3)国防工业出版社

1、系统辨识——连续系统传递函数——脉冲传递函数function h=Continuous_system_transferFcn(N,G,dt)% N——系统阶数% G——采样数据(个数大于等于2N+1)% G为一维行向量% dt——采样间隔if nargin<3errordlg('not enough input varibles','error hint');elseg_NN=zeros(N,N);for i=1:Ng_NN(i,:)=G(i+1:i+1+N-1);endg_N=-G(1:N)';a=inv(g_NN)*g_N;%% x的求解syms xfor i=1:NX(i)=x^i;endf=X*a+1;x=double(solve(f));%%极点的求解p=log(x)/dt;c_NN=zeros(N,N);for i=1:Nc_NN(i,:)=x.^(i-1);endc_N=G(1:N)';%%增益求解k=inv(c_NN)*c_N;pkz=zeros(1,N);p=p';k=k';Continuous_TransferFcn=0;for i=1:NContinuous_TransferFcn=Continuous_TransferFcn+zpk(z(i),p(i),k(i)); endContinuous_TransferFcnendend例题 3.1(P32)>>G=[0 0.1924 0.2122 0.1762];>> N=2;>> dt=1;>> Continuous_system_transferFcn(N,G,dt) p =-0.4934-0.7085k =1.6280-1.6280Continuous_TransferFcn =0.35024 s---------------------(s+0.4934) (s+0.7085)Continuous-time zero/pole/gain model.习题3.2(P34)>> G=[0 0.196 0.443 0.624 0.748 0.831]; >> N=3;>> dt=0.2;>> Continuous_system_transferFcn(N,G,dt) p =-0.0633-1.7846-11.1860k =1.1249-1.33990.2150Continuous_TransferFcn =-0.08507 s (s-253.1)-------------------------------(s+0.06329) (s+1.785) (s+11.19) Continuous-time zero/pole/gain model.2 系统辨识——离散系统传递函数——脉冲传递函数function h=Discrete_system_transferFcn(N,G,dt)% N——系统阶数% G——采样数据(个数大于等于2N+1)% G为一维行向量% dt——采样间隔if nargin<3errordlg('not enough input varibles','error hint');elseg_NN=zeros(N,N);for i=1:Ng_NN(i,:)=G(i+1:i+1+N-1);endg_N=-G(N+2:2*N+1)';a1=inv(g_NN)*g_N;a=zeros(N,1);for j=1:Na(j,1)=a1(N+1-j,1);endB=zeros(N+1,N+1);B=diag(linspace(1,1,N+1));for i=1:N+1for j=1:N+1if (i==j)&(i<N+1)&(j<N+1)B(i+1:N+1,j)=a(1:N+1-i,1);endendendg__N=G(1:N+1)';b=B*g__N;abnum=b';den=[1 a'];Discrete_TransferFcn=tf(num,den,dt);Discrete_TransferFcnendend例题 3.2(P33)>> G=[0 7.157039 9.491077 8.563839 5.930506 2.845972 0.144611]; >> N=3;>> dt=0.05;>> Discrete_system_transferFcn(N,G,dt)a =-2.23001.7606-0.4950b =7.1570-6.4691-0.0009Discrete_TransferFcn =7.157 z^2 - 6.469 z - 0.0008933--------------------------------z^3 - 2.23 z^2 + 1.761 z - 0.495Sample time: 0.05 secondsDiscrete-time transfer function.习题3.3(P34)>> G=[10 6.989 4.711 3.136 2.137 1.559 1.252 1.096 0.938 0.860]; >> N=3;>> dt=0.1;>> Discrete_system_transferFcn(N,G,dt)a =-2.19191.7166-0.4794b =10.0000-14.92956.55810.0139Discrete_TransferFcn =10 z^3 - 14.93 z^2 + 6.558 z + 0.01389--------------------------------------z^3 - 2.192 z^2 + 1.717 z - 0.4794Sample time: 0.1 secondsDiscrete-time transfer function.。
系统辨识结课大作业
PDF 文件使用 "pdfFactory Pro" 试用版本创建
模型辨识
m3=pem(dat1e,‘p2zd’,‘td’,{‘max’,5}); 1+Tz*s G(s) = K * ------------------ * exp(-Td*s) (1+Tp1*s)(1+Tp2*s) Estimated using PEM from data set dat1e Loss function 0.00864915 and FPE 0.00894234
1)获取数据:
Page
3
PDF 文件使用 "pdfFactory Pro" 试用版本创建
2)数据预处理
Page
4
PDF 文件使用 "pdfFactory Pro" 试用版本创建
模型辨识 (ARX)
建立几个低阶且不同时延的ARX模型,并找出最合适 的模型阶次
结果分析
从仿真的结果来看,除了一阶无迟延模型外,其余几种辨识模型 与原吹风机的实际模型都有一定的可比性,也具有一定的跟踪能 力,在有效性校验的比较中,可以看出二阶迟延模型为88.13%, 显然二阶迟延模型的匹配度要高一点,而且二阶迟延模型的残差 均值近似为零,但仍需要进一步的优化。
Page
18
PDF 文件使用 "pdfFactory Pro" 试用版本创建
Page 13
PDF 文件使用 "pdfFactory Pro" 试用版本创建
辨识模型分析
用后300个样本值进行验证,对所取的6种模型的有效性进行比较。
二阶延迟模型的拟 合度最高
Page
基于智能推荐的研究生选课系统研究
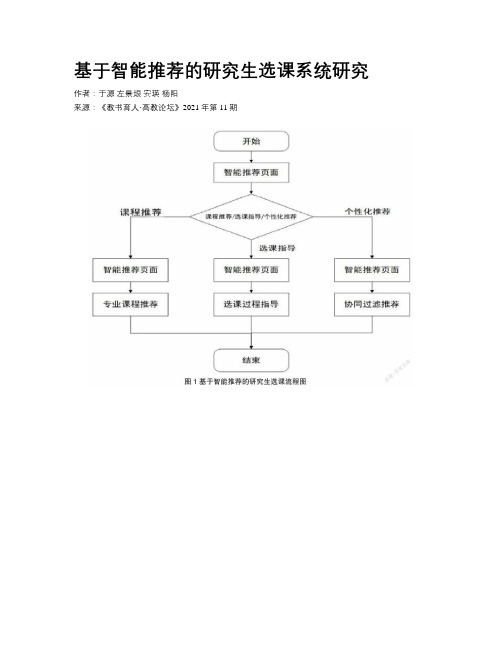
基于智能推荐的研究生选课系统研究作者:于源左景垠安瑛杨阳来源:《教书育人·高教论坛》2021年第11期[摘要]本文针对研究生选课过程中存在的问题,设计了基于智能推荐的研究生选课推荐系统。
系统主要包括“先验”课程推荐、“后验”课程推荐和“智能”课程推荐。
引入协同过滤推荐算法,系统可实现“智能”、个性化课程推荐。
以机械工程专业的研究生选课为例,结合实例对比分析了基于项目和基于用户的协同过滤推荐算法的实现原理及其在研究生选课系统中算法的适用性。
分析结果表明:在研究生选课推荐系统中,ItemCF算法比UserCF算法更能发挥优势,适用性更强。
[关键词]研究生选课;智能推荐;基于用户的协同过滤算法;基于项目的协同过滤算法[中图分类号] G643 [文献标志码] A [文章编号] 1008-2549(2021) 11-0038-04硕士研究生培养主要采取课程学习与科学研究并重的方式。
随着高校教育体制的改革,研究生除了学习本专业的课程之外,还可以根据兴趣和自身发展需要选择与专业相关度较低的非学位课程,有助于激发学生学习热情,使其发展成为社会所需的复合型人才。
[1]但是,由于导师选课指导的缺位、学生选课的盲目性和选课管理制度不健全等原因,许多刚入学的研究生对自己的课程和学习情况不甚了解,不清楚如何选择适合自己的课程。
[2-5]他们往往根据自己对课程的主观判断或者根据往届研究生的建议进行选课,导致选课存在一定随意性,不仅浪费教育资源,而且无法达到研究生综合素质培养目标。
针对上述情况,本文引入智能推荐算法,对具有基本信息管理功能的研究生选课系统进行研究和改进。
在挖掘往年学生选课行为数据的基础上,通过协同过滤推荐算法探究课程之间的关联度并得到个性化推荐课程列表,在一定程度上对研究生选课提供了有效指导和个性化培养方案。
一、研究生选课智能推荐系统的功能设计“智能推荐”是研究生选课系统的核心功能,在课程基本信息管理基础上,具备课程推荐的特点,其功能分为“课程推荐”“选课指导”和“个性化推荐”三个模块。
系统辨识大作业.
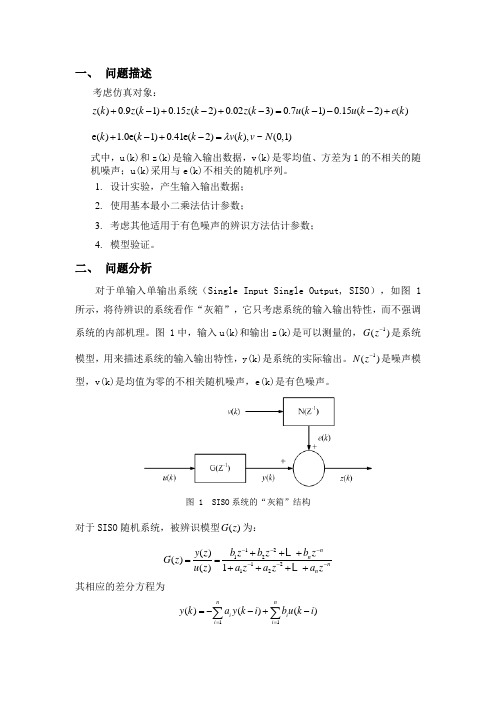
一、 问题描述考虑仿真对象:()0.9(1)0.15(2)0.02(3)0.7(1)0.15(2)()z k z k z k z k u k u k e k +-+-+-=---+ e() 1.0e(1)0.41e(2)(),~(0,1)k k k v k v N λ+-+-=式中,u(k)和z(k)是输入输出数据,v(k)是零均值、方差为1的不相关的随机噪声;u(k)采用与e(k)不相关的随机序列。
1. 设计实验,产生输入输出数据;2. 使用基本最小二乘法估计参数;3. 考虑其他适用于有色噪声的辨识方法估计参数;4. 模型验证。
二、 问题分析对于单输入单输出系统(Single Input Single Output, SISO ),如图 1所示,将待辨识的系统看作“灰箱”,它只考虑系统的输入输出特性,而不强调系统的内部机理。
图 1中,输入u(k)和输出z(k)是可以测量的,1()G z -是系统模型,用来描述系统的输入输出特性,y(k)是系统的实际输出。
1()N z -是噪声模型,v(k)是均值为零的不相关随机噪声,e(k)是有色噪声。
图 1 SISO 系统的“灰箱”结构对于SISO 随机系统,被辨识模型()G z 为:12121212()()()1n n nn b z b z b z y z G z u z a z a z a z ------+++==++++ 其相应的差分方程为11()()()n ni i i i y k a y k i b u k i ===--+-∑∑若考虑被辨识系统或观测信息中含有噪声,被辨识模型可改写为11()()()()n ni i i i z k a y k i b u k i v k ===--+-+∑∑式中,z(k)为系统输出量的第k 次观测值;y(k)为系统输出量的第k 次真值,y(k-1)为系统输出量的第k-1次真值,以此类推;u(k)为系统的第k 个输入值,u(k-1)为系统的第k-1个输入值;v(k)为均值为0的不相关随机噪声。
系统工程课程(48)教案

课堂授课()课堂讨论(√)实验(√)上机(√)
教学手段
多媒体教学()普通教学()双语教学()
重点
难点
1.MATLAB软件的矩阵功能应用
2.解释结构模型(ISM)算法程序设计
主要
教学内容
1.系统工程综合实验要求
2.各小组提出“系统性问题”;
3.基于解释结构模型(ISM)方法对系统进行结构分析;
2.通过讨论使各小组相互了解、加强沟通和学习。
3.提高学生信息收集与处理的能力,提高表述能力。
4.增强学生分析问题、解决问题的能力
5.了解论文的撰写格式,掌握撰写论文的要求,提高撰写论文的质量
6.通过讨论评选出优秀小论文能够对学生的阶段性学习及时考核。加强教师对学生的小论文质量的把关。
教学方法
课堂授课()课堂讨论(√)实验()上机()
1.系统工程方法论的发展简史和特色。
2.霍尔的三维结构体系方法论之一:时间维;
霍尔的三维结构体系方法论之二:知识维;
霍尔的三维结构体系方法论之三:逻辑维。
3.系统工程方法论的逻辑维思想和逻辑维步骤,特别是逻辑维的第二步:“目标的确定”体现在管理工作中的重要性!
课后要求
课后作业和预(复)习内容:
大作业:(1)上海工程技术大学搬迁选址问题——系统环境因素有哪些?
2.系统优化与决策的模型建立、评价与决策方法及应用
主要
教学内容
系统工程方法论的逻辑维思想和逻辑维步骤:
1.系统分析特别是方案汇总的概念和方案制定的方法。
2.目标的概念、目标确定的方法、目标的评价标准
3.系统优化---建模对方案进行优化。
课后要求
课后作业和预(复)习内容:
按照Hall的逻辑维步骤
四川大学 实验室安全与环境保护 线上慕课全部答案(含课程考试)(中国大学MOOC)

四川大学实验室安全与环境保护线上慕课答案(含课程考试)(中国大学MOOC)第九章应急识图与制图备灾1.地图知识随堂测验1、地图的三要素是图名、图例和比例尺【参考答案】错误2、比例尺、地图投影、各种坐标系统就构成了地图的数学法则。
【参考答案】正确2.应急识图随堂测验1、灾害风险图的特性应该包括A、科学性B、时效性C、实用性D、以上都不对【参考答案】ABC2、应急识图就是看看位置、看方向、看图例、看路线、看资源、看实地、看出口、看提示【参考答案】正确3.应急制图随堂测验1、应急制图就是熟悉环境的过程,对环境越熟悉,面对突发事件时候就越不会惊慌失措【参考答案】正确2、应急制图不需要实地调研应急出口、逃生路线、应急资源、排查风险隐患、确定安全避难场所等情况【参考答案】错误4.应急准备随堂测验1、应急预案写完就可以了,不需要演练和宣讲【参考答案】错误2、应急地图的制作是应急预案的重要组成部分【参考答案】正确应急识图与制图备灾单元测验1、应急逃生地图的安全标志符号设计应要求标准统一或(),以便于管理A、符合标准B、符合习惯C、符合行规D、以上都不对【参考答案】B2、应急地图的广泛应用能够极大提高应急管理信息的传输和交换能力。
【参考答案】正确3、灾害不可能反复发生【参考答案】错误4、根据我国《突发事件应对法》突发事件有包括自然灾害、()、()、()、四大类【参考答案】事故灾难、公共卫生事件、社会安全事件5、酒店房间的逃生疏散图一般在什么位置?()【参考答案】房门后面应急识图与制图备灾单元作业1、请同学们下载文档后,按照要求完成应急识图与制图备灾实验报告。
【参考答案】由教师批改第十章初期火灾处置1.灭火器基础知识随堂测验1、防止保险销脱落的部件是()A、铅封B、固定带C、压力表D、提把【参考答案】A2、灭火器缩写代号中,()表示干粉。
A、TB、GC、FD、P【参考答案】C2.灭火器操作要领随堂测验1、大量吸入干粉灭火剂,会引发吸入性肺炎和化学性肺炎。
余绪缨

余绪缨——浪漫而有风骨的"管理会计之父"“前沿求索几度秋,由技入道勇探求,攀登莫负平生愿,巍巍砥柱立中流。
”12月6日下午举行的2006年度“余绪缨奖学金”颁发大会上,84岁的厦门大学管理学院博士研究生导师余绪缨教授,与往年一样赋新诗。
从第一次发放奖学金开始,每年他都会创作一首新诗送给获奖的学生,诗中蕴含着余老做人和做学问的原则。
余绪缨,1922年8月出生于江西靖安,1945年毕业于厦门大学会计系,并留校任教。
长期在厦门大学从事教学和科研工作,任厦门大学会计系教授、博士研究生导师、经济学博士后流动站学术联系人、国际权威学术刊物《会计国际学刊》(美)编辑政策部成员、中国会计学会顾问。
从上世纪70年代开始,余绪缨在我国率先致力于“现代管理会计”这一新兴学科的引进、创建、发展,上世纪80年代初期,他又进一步提出了包括微观管理会计、宏观管理会计和国际管理会计三个组成部分的广义管理会计体系的新概念。
目前,他是全国惟一的管理会计博士生导师。
学生们集资设立“余绪缨奖学金”,用于奖励品学兼优的会计学子每年余老生日,弟子们都会想方设法准备一些贺礼,但余老从来不收。
2001年,余绪缨教授80岁大寿,这一次学生们决定无论如何都要送出一份礼物,便拐弯抹角地打探老师最想要什么。
余老的回答是:“对我来说,学术生命比生理生命更重要。
”最后,学生们想出了一份最合适的礼物:筹集资金设立“余绪缨奖学金”,用于奖励品学兼优的会计学子。
余绪缨指导过的博士和硕士们纷纷响应,20多万元启动基金很快到位。
这些资金全部都是弟子们捐赠的,此后每年都有新毕业的弟子加入捐赠。
从2003年正式启动到现在已颁发了四次奖学金,有45名学生获奖,奖励资金17万多元。
“余绪缨奖学金”的奖励额度在目前厦门大学设立的所有个人奖学金中是最高的,获奖学生按等级不同授奖,最低3000元,最高8000元。
余绪缨每年都要亲自给学生们颁奖,他很喜欢这份礼物,因为这个奖项是“先进帮后学”,由已取得成就的师兄师姐募捐设立奖学金来奖励后来的师弟师妹,除了物质上的资助更有精神上的激励意义。
模式识别作业第三章2
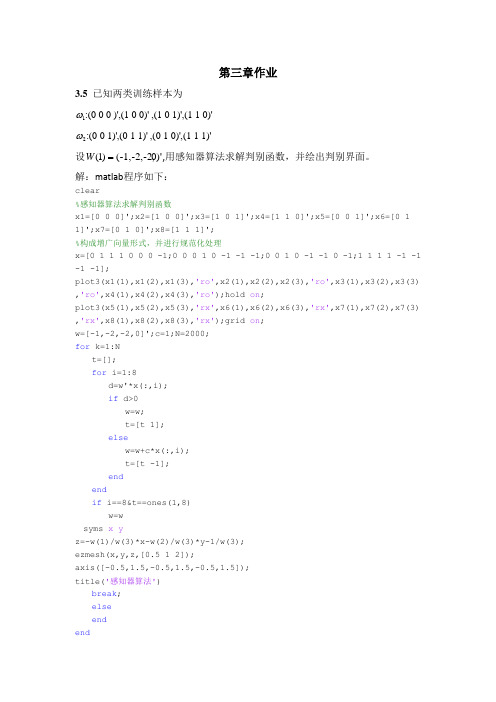
第三章作业3.5 已知两类训练样本为1:(0 0 0 )',(1 0 0)' ,(1 0 1)',(1 1 0)'ω2:(0 0 1)',(0 1 1)' ,(0 1 0)',(1 1 1)'ω设0)'(-1,-2,-2,)1(=W,用感知器算法求解判别函数,并绘出判别界面。
解:matlab程序如下:clear%感知器算法求解判别函数x1=[0 0 0]';x2=[1 0 0]';x3=[1 0 1]';x4=[1 1 0]';x5=[0 0 1]';x6=[0 1 1]';x7=[0 1 0]';x8=[1 1 1]';%构成增广向量形式,并进行规范化处理x=[0 1 1 1 0 0 0 -1;0 0 0 1 0 -1 -1 -1;0 0 1 0 -1 -1 0 -1;1 1 1 1 -1 -1 -1 -1];plot3(x1(1),x1(2),x1(3),'ro',x2(1),x2(2),x2(3),'ro',x3(1),x3(2),x3(3) ,'ro',x4(1),x4(2),x4(3),'ro');hold on;plot3(x5(1),x5(2),x5(3),'rx',x6(1),x6(2),x6(3),'rx',x7(1),x7(2),x7(3) ,'rx',x8(1),x8(2),x8(3),'rx');grid on;w=[-1,-2,-2,0]';c=1;N=2000;for k=1:Nt=[];for i=1:8d=w'*x(:,i);if d>0w=w;t=[t 1];elsew=w+c*x(:,i);t=[t -1];endendif i==8&t==ones(1,8)w=wsyms x yz=-w(1)/w(3)*x-w(2)/w(3)*y-1/w(3);ezmesh(x,y,z,[0.5 1 2]);axis([-0.5,1.5,-0.5,1.5,-0.5,1.5]);title('感知器算法')break;elseendend运行结果:w =3-2-31判别界面如下图所示:若有样本123[,,]'x x x x =;其增广]1,,,[321x x x X =;则判别函数可写成: 1323')(321+*-*-*=*=x x x X w X d若0)(>X d ,则1ω∈x ,否则2ω∈x3.6 已知三类问题的训练样本为123:(-1 -1)', (0 0)' , :(1 1)'ωωω试用多类感知器算法求解判别函数。
一种改进型线圈靶测速系统
第16卷第25期2016年9月1671—1815(2016)025-0286-05科学技术与工程Science Technology and EngineeringVol. 16 No.25 Sep.2016©2016 Sci.Tech.Engrg.自动化技术、计算机技术一种改进型线圈靶测速系统韦啸成1余红英1杨臻2(中北大学计算机与控制工程学院1,机电工程学院2,太原030051)摘要现有的水下弹丸测速系统采用线圈靶对弹丸进行测试;但是存在灵敏度低、噪声严重、线路冗杂和不便于后期处理 等问题。
为改进以上问题,提出一种改进型线圈靶测速系统,采用低导磁率金属作为线圈靶外框,以漆包线缠绕坡莫合金作 为线圈,以增强其灵敏度;同时设计了信号调理和并联电路,将多路传感器信号滤波放大并整合成一路信号,保证线路筒洁; 后期数据处理使用小波降噪,并进行突变点检测,能够得出精确的穿越时间点;经过多次试验验证,该系统动态特性良好,测试结果更精确,为水下自动武器的研制提供了帮助。
关键词线圈靶 电磁感应 小波分析 降噪中图法分类号TP212.9; 文献标志码A弹丸的出膛速度以及速度衰减能够精确反映枪 械的工作状态,弹丸的速度测试在武器的设计、定性 和后期维护保养工作中有着举足轻重的地位,是武 器发射系统测试的必备科目。
传统的测试方法大多 数为陆基测试环境设计,一般采用天幕靶等光电设 备进行测试,取样点较少、测出速度较粗;并且由于 水体流动折射光线无法适用于水下环境。
水下环境 一般采用磁电式传感器进行测速,通过测试弹丸通 过多个传感器的时间从而计算出弹丸在传感器间的 平均速度。
现有的水下测试系统常采用线圈传感器对弹丸 进行感应测速;但是在实际使用过程中,现有的线圈 靶由于灵敏度较低,常常采用大倍率放大器放大信 号,极易引入水体噪声,造成误判误读;采用的模拟 方式或者纸质形式进行记录,无法进行详细的数据 分析和回顾。
系统安全工程_常州大学中国大学mooc课后章节答案期末考试题库2023年
系统安全工程_常州大学中国大学mooc课后章节答案期末考试题库2023年1.危险发生可能性等级表中A类的特征是()参考答案:频繁的2.微观预测是指对整个生产行业、一个地区、一个集团公司的安全状况的预测。
参考答案:错误3.故障一般是指元件、子系统、系统在规定的运行时间、条件内,达不到设计规定的功能的。
参考答案:一种状态4.故障是指“故障引起的人身伤亡和物质财产的损失”。
()参考答案:错误5.安全决策就是针对生产活动中需要解决的特定安全问题,经过分析、论证与评价,从中选择最优方案并予以实施的过程。
参考答案:正确6.故障等级是衡量对系统任务、人员安全造成影响的尺度。
()参考答案:正确7.系统安全管理决策:主要解决安全方针、政策、规划、安全管理体制、法规、监督监察及推进安全事业发展等方面的决策。
参考答案:正确8.系统安全预测是在分析、研究系统过去和现在安全生产资料的基础上,利用各种知识和科学方法,对系统未来的安全状况进行预测,预测系统的危险种类及危险程度,以便对事故进行预报和预防。
参考答案:正确9.故障模式判断的5WH方法,就是指Who(谁),When(何时)、Where(何处),What(什么)、Why(为什么)的总称。
参考答案:错误10.绘制事故树时,当所有输入事件都发生时,输出事件E才发生,应使用()来表示三者之间的逻辑关系参考答案:与门11.故障一般是指元件、子系统、系统在规定的运行时间、条件内,达不到设计规定功能的状态。
()参考答案:正确12.由专业机构或职能部门编制使用,主要用于专业性的安全检查或特定设备的安全检查的检查表为()参考答案:专业性安全检查表13.从系统安全的角度来考虑,用基本事件发生概率的相对变化率与顶上事件发生概率的相对变化率之比来表示基本事件的重要度,即从敏感度和自身发生概率的双重角度衡量各基本事件的重要度标准,这就是()参考答案:临界重要度14.我国系统安全工程的研究开发从()开始的。
合工大系统辨识作业及答案
系统辨识作业一、 简答题1 系统辨识的实验设计应包含那些内容?答:系统辨识实验设计应包含选择实验信号、采样时间、辨识时间、输入输出数据长度等。
2 判断下列是否为一个正确周期的M 序列,并说明原因。
111100010011011 111100********* 答:不是M 序列,因为M 序列的周期为15,由M 序列的性质知序列中“1”的状态应为8个 而第一个中有9个 所以不是M 序列3证明加权最小二乘估计的无偏性。
证明:加权最小二乘估计的解为:()1ˆTT WLSW WY θ-=ΦΦΦ 其中Φ为输入矩阵 W 为加权矩阵 Y 为输出矩阵。
()()11ˆ()T T WLS T TE W W e E W We θθθ--⎡⎤⎡⎤=ΦΦΦΦ+⎣⎦⎢⎥⎣⎦⎡⎤=+ΦΦΦ⎢⎥⎣⎦由于Φ与e 统计独立,则()10T T E W We -⎡⎤ΦΦΦ=⎢⎥⎣⎦即ˆWLS E θθ⎡⎤=⎣⎦所以ˆWLSθ是无偏估计量,命题得证。
4比较最小二乘法、广义最小二乘法和辅助变量法的优缺点。
答:基本最小二乘对低噪声有效,参数估计值可很快收敛到真值,所需计算量相对较少,但对实际噪声估计有偏。
广义最小二乘法:计算量大,可能不收敛,可能是有偏估计。
但如果对噪声模型用随机逼近法,而对过程模型采取最小二乘法则获得较好形式的广义最小二乘法。
辅助变量法可以一次性完成计算,但是计算量也大,对初值选择很敏感。
5答:对于n 阶系统与n+1阶系统参数估计之间有如下的关系:对于n+1阶系统 ()()()11()()A z y k B z u k e k --=+设其待估参数为()011111...(1)(2)T T Tn n n n n b a b a b a b θθθ++⎡⎤⎡⎤+==⎣⎦⎣⎦ 则(1)()[()]T n A Y n θθθ=-Φ-Φ由题目知n=2时系统参数为准确值,则n=3时按照上式去计算,估算出的系数必远远偏离系统模型参数值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BP神经网络(一)定义误差反向传播的BP算法简称BP算法,其基本思想是梯度下降法。
它采用梯度搜索技术,以期使网络的实际输出值与期望输出值的误差均方值为最小。
(二)BP网络特点1)是一种多层网络,包括输入层、隐含层和输出层;2)层与层之间采用全互连方式,同一层神经元之间不连接;3)权值通过δ学习算法进行调节;4)神经元激发函数为S函数;5)学习算法由正向传播和反向传播组成;6)层与层的连接是单向的,信息的传播是双向的。
(三)BP主要应用回归预测(可以进行拟合,数据处理分析,事物预测,控制等)、分类识别(进行类型划分,模式识别等),但无论那种网络,什么方法,解决问题的精确度都无法打到100%的,但并不影响其使用,因为现实中很多复杂的问题,精确的解释是毫无意义的,有意义的解析必定会损失精度。
(四)BP网络各种算法的应用范围1)Traingd:批梯度下降训练函数,沿网络性能参数的负梯度方向调整网络的权值和阈值;2)Traingdm:动量批梯度下降函数,也是一种批处理的前馈神经网络训练方法,不但具有更快的收敛速度,而且引入了一个动量项,有效避免了局部最小问题在网络训练中出现;3)Trainrp:有弹回的BP算法,用于消除梯度模值对网络训练带来的影响,提高训练的速度(主要通过delt_inc和delt_dec来实现权值的改变);4)Trainlm:Levenberg-Marquardt算法,对于中等规模的BP神经网络有最快的收敛速度,是系统默认的算法.由于其避免了直接计算赫赛矩阵,从而减少了训练中的计算量,但需要较大内存量.;5)traincgb:Plwell-Beale算法:通过判断前后梯度的正交性来决定权值和阈值的调整方向是否回到负梯度方向上来;6)trainscg:比例共轭梯度算法:将模值信赖域算法与共轭梯度算法结合起来,减少用于调整方向时搜索网络的时间。
一般来说,traingd和traingdm是普通训练函数,而traingda,traingdx,traingd,trainrp,traincgf,traincgb,trainsc g,trainbgf等等都是快速训练函数.总体感觉就是训练时间的差别比较大,还带有精度的差异。
(五)实例及其仿真分析(BP网络底层代码的实现)1)程序%% 读入数据xlsfile='student.xls';[data,label]=getdata(xlsfile);%% 划分数据[traind,trainl,testd,testl]=divide(data,label);%% 设置参数rng('default')rng(0)nTrainNum = 60; % 60个训练样本nSampDim = 2; % 样本是2维的%% 构造网络net.nIn=2;net.nHidden = 3; % 3个隐含层节点net.nOut = 1; % 一个输出层节点w = 2*(rand(net.nHidden,net.nIn)-1/2); % nHidden * 3 一行代表一个隐含层节点b = 2*(rand(net.nHidden,1)-1/2);net.w1 = [w,b];W = 2*(rand(net.nOut,net.nHidden)-1/2);B = 2*(rand(net.nOut,1)-1/2);net.w2 = [W,B];%% 训练数据归一化mm=mean(traind);% 均值平移for i=1:2traind_s(:,i)=traind(:,i)-mm(i);end% 方差标准化ml(1) = std(traind_s(:,1));ml(2) = std(traind_s(:,2));for i=1:2traind_s(:,i)=traind_s(:,i)/ml(i);end%% 训练SampInEx = [traind_s';ones(1,nTrainNum)]; expectedOut=trainl;eb = 0.01; % 误差容限eta = 0.6; % 学习率mc = 0.8; % 动量因子maxiter = 2000; % 最大迭代次数iteration = 0; % 第一代errRec = zeros(1,maxiter);outRec = zeros(nTrainNum, maxiter);NET=[]; % 记录% 开始迭代for i = 1 : maxiterhid_input = net.w1 * SampInEx; % 隐含层的输入hid_out = logsig(hid_input); % 隐含层的输出ou_input1 = [hid_out;ones(1,nTrainNum)]; % 输出层的输入ou_input2 = net.w2 * ou_input1;out_out = logsig(ou_input2); % 输出层的输出outRec(:,i) = out_out'; % 记录每次迭代的输出err = expectedOut - out_out; % 误差sse = sumsqr(err);errRec(i) = sse; % 保存误差值fprintf('第%d 次迭代误差: %f\n', i, sse);iteration = iteration + 1;% 判断是否收敛if sse<=ebbreak;end% 误差反向传播% 隐含层与输出层之间的局部梯度DELTA = err.*dlogsig(ou_input2,out_out);% 输入层与隐含层之间的局部梯度delta = net.w2(:,1:end-1)' * DELTA.*dlogsig(hid_input,hid_out);% 权值修改量dWEX = DELTA*ou_input1';dwex = delta*SampInEx';% 修改权值,如果不是第一次修改,则使用动量因子if i == 1net.w2 = net.w2 + eta * dWEX;net.w1 = net.w1 + eta * dwex;elsenet.w2 = net.w2 + (1 - mc)*eta*dWEX + mc * dWEXOld;net.w1 = net.w1 + (1 - mc)*eta*dwex + mc * dwexOld; end% 记录上一次的权值修改量dWEXOld = dWEX;dwexOld = dwex;end%% 测试% 测试数据归一化for i=1:2testd_s(:,i)=testd(:,i)-mm(i);endfor i=1:2testd_s(:,i)=testd_s(:,i)/ml(i);end% 计算测试输出InEx=[testd_s';ones(1,260-nTrainNum)];hid_input = net.w1 * InEx;hid_out = logsig(hid_input); % output of the hidden layer nodes ou_input1 = [hid_out;ones(1,260-nTrainNum)];ou_input2 = net.w2 * ou_input1;out_out = logsig(ou_input2);out_out1=out_out;% 取整out_out(out_out<0.5)=0;out_out(out_out>=0.5)=1;% 正确率rate = sum(out_out == testl)/length(out_out);%% 显示% 显示训练样本train_m = traind(trainl==1,:);train_m=train_m';train_f = traind(trainl==0,:);train_f=train_f';figure(1)plot(train_m(1,:),train_m(2,:),'bo');hold on;plot(train_f(1,:),train_f(2,:),'r*');xlabel('身高')ylabel('体重')title('训练样本分布')legend('男生','女生')figure(2)axis onhold ongrid[nRow,nCol] = size(errRec);plot(1:nCol,errRec,'LineWidth',1.5);legend('误差平方和');xlabel('迭代次数','FontName','Times','FontSize',10);ylabel('误差');% 正确率:87%%将样本逐个输入,由于样本输入的随机性,可以在一定程度上避免出现局部最优。
%% 清理clear allclc%% 读入数据xlsfile='student.xls';[data,label]=getdata(xlsfile);%% 划分数据[traind,trainl,testd,testl]=divide(data,label);%% 设置参数rng('default')rng(0)nTrainNum = 60; % 60个训练样本nSampDim = 2; % 样本是2维的M=2000; % 迭代次数ita=0.1; % 学习率alpha=0.2;%% 构造网络HN=3; % 隐含层层数net.w1=rand(3,HN);net.w2=rand(HN+1,1);%% 归一化数据mm=mean(traind);for i=1:2traind_s(:,i)=traind(:,i)-mm(i);endml(1) = std(traind_s(:,1));ml(2) = std(traind_s(:,2));for i=1:2traind_s(:,i)=traind_s(:,i)/ml(i);end%% 训练for x=1:M % 迭代ind=randi(60); % 从1-60中选一个随机数in=[traind_s(ind,:),1]; % 输入层输出net1_in=in*net.w1; % 隐含层输入net1_out=logsig(net1_in); % 隐含层输出net2_int = [net1_out,1]; % 下一次输入net2_in = net2_int*net.w2; % 输出层输入net2_out = logsig(net2_in); % 输出层输出err=trainl(ind)-net2_out; % 误差errt(x)=1/2*sqrt(sum(err.^2)); % 误差平方fprintf('第%d 次循环,第%d个学生,误差%f\n',x,ind, errt(x));% 调整权值for i=1:length(net1_out)+1for j=1:1ipu1(j)=err(j); % 局部梯度% 输出层与隐含层之间的调整量delta1(i,j) = ita.*ipu1(j).*net2_int(i);endendfor m=1:3for i=1:length(net1_out)% 局部梯度ipu2(i)=net1_out(i).*(1-net1_out(i)).*sum(ipu1.*net.w2);% 输入层和隐含层之间的调整量delta2(m,i)= ita.*in(m).*ipu2(i);endend% 调整权值if x==1net.w1 = net.w1+delta2;net.w2 = net.w2+delta1;elsenet.w1 = net.w1+delta2*(1-alpha) + alpha*old_delta2;net.w2 = net.w2+delta1*(1-alpha) + alpha*old_delta1;endold_delta1=delta1;old_delta2=delta2;end%% 测试% 测试数据归一化for i=1:2testd_s(:,i)=testd(:,i)-mm(i);endfor i=1:2testd_s(:,i)=testd_s(:,i)/ml(i);endtestd_s = [testd_s,ones(length(testd_s),1)];net1_in=testd_s*net.w1;net1_out=logsig(net1_in);net1_out=[net1_out,ones(length(net1_out),1)]; net2_int = net1_out;net2_in = net2_int*net.w2;net2_out=net2_in;% 取整net2_out(net2_out<0.5)=0;net2_out(net2_out>=0.5)=1;rate=sum(net2_out==testl')/length(net2_out); %% 显示figure(1);plot(1:M,errt,'b-','LineWidth',1.5);xlabel('迭代次数')ylabel('误差')title('BP网络串行训练的误差')%正确率:88.5%2)仿真结果。