汽车车载网络技术图文
合集下载
车载网络技术ppt课件
16
完整版PPT课件
4 各种车用总线的介绍----- LIN
局域网互联(LIN)是用于汽车分布式电控系统的一种 新型低成本串行通信系统,它是一种基于UART的数据格 式、主从结构的单线12V的总线通信系统,主要用于智能 、传感器和执行器的串行通信,而这正是CAN总线的带宽 和功能所不要求的部分。由于目前尚未建立低端多路通信 的汽车标准,因此LIN正试图发展成为低成本的串行通信 的行业标准。LIN的标准简化了现有的基于多路解决方案 的低端SCI,同时将降低汽车电子装置的开发、生产和服 务费用。LIN采用低成本的单线连接,传输速度最高可达 20kb/s,对于低端的大多数应用对象来说,这个速度是 可以接受的,它的媒体访问采用单主、多从的机制,不需 要进行仲裁。从节点中不需要晶体震荡器而能进行自同步 ,这极大地减少了硬件平台的成本。
转向、线控刹车等),即利用容错的电气/电子系 统取代机械/液压部分。线控操作包括从转向到刹 车和加速等所有汽车控制应用互连技术,它可以 补充并将最终代替目前的机械和液压解决方案。 就总体器件和组装来说,采用电子系统比采用机 械和液压部件成本更低。另外,FlexRay的高数 据速率使它非常适合于汽车骨干网络。
3
完整版PPT课件
Contents
1. 车载网络技术的发展简史
2. 车载网络技术介绍 3. 车载网络系统在汽车上的应用 4. 各种车用总线的介绍 5. 结语
4
完整版PPT课件
2 车载网络技术介绍
❖ 现场总线 是用作现场控制系统的,直接与所有受控
25
完整版PPT课件
LOGO
整个网络有一个总体时钟,每一个控制单
元有一个局部时钟,FlexRay系统有一个特定
第九章 汽车车载网络技术简介
传[U1] 统点对点通讯方式
仪 表 板
变速控 制
主动悬 架
自 动 座椅
自 动 门窗
安 全 气囊
传统的点对点的通讯方式
CAN总线的通讯方式
8.1.2 车载网络的结构
车载网络结构示意图
8.1.3 常用基本术语 1. 数据总线 数据总线是模块间运行数据的通道,即所谓 的信息高速公路。数据总线可以实现在一条数 据线上传递的信号能被多个系统(控制单元) 共享,从而最大限度地提高系统整体效率,充 分利用有限的资源。
2层:数据链路层 硬件控制
1层:物理层
2. CAN网络结构
应用层 网 络 管 理
交互层
传输层
CAN层
CAN总线
8.3.5 CAN总线的特点
1.CAN为多主方式工作,即网络上任一节点均可在任意时刻主 动地向网络上其他节点发送信息,而不分主从,通信方式 灵活,且无需站地址等节点信息2. CAN网络上的节点信息 分成不同的优先级,可满足不同的实时要求,高优先级的 数据最多可在134us内得到传输。 3. CAN采用非破坏性总线性仲裁技术,当多个节点同时向总线 发送信息时,优先级较低的节点会主动地退出发送,而最 高优先级的节点可不受影响地继续传输数据,从而大大节 省了总线冲突仲裁时间。 4. CAN只需通过帧滤波即可实现点对点、一点对多点及全局广 播等几种方式传送接受数据,无需专门的调度。
2. 多路传输 所谓多路传输,指在计算机局域网中,将多种信息混 合或交叉通过一个通信信道传送的方式。
传统线路与多路传输线路
3. 模块/节点 模块就是一种电子装置。简单一点的如温 度和压力传感器,复杂的如计算机(微处理 器)。传感器是一个模块装置,根据温度和 压力的不同产生不同的电压信号。这些电压 信号在计算机(一种数字装置)的输人接口 被转变成数字信号。在计算机多路传输系统 中一些简单的模块被称为节点。各节点通过 插接器连接到多路传输系统中。
仪 表 板
变速控 制
主动悬 架
自 动 座椅
自 动 门窗
安 全 气囊
传统的点对点的通讯方式
CAN总线的通讯方式
8.1.2 车载网络的结构
车载网络结构示意图
8.1.3 常用基本术语 1. 数据总线 数据总线是模块间运行数据的通道,即所谓 的信息高速公路。数据总线可以实现在一条数 据线上传递的信号能被多个系统(控制单元) 共享,从而最大限度地提高系统整体效率,充 分利用有限的资源。
2层:数据链路层 硬件控制
1层:物理层
2. CAN网络结构
应用层 网 络 管 理
交互层
传输层
CAN层
CAN总线
8.3.5 CAN总线的特点
1.CAN为多主方式工作,即网络上任一节点均可在任意时刻主 动地向网络上其他节点发送信息,而不分主从,通信方式 灵活,且无需站地址等节点信息2. CAN网络上的节点信息 分成不同的优先级,可满足不同的实时要求,高优先级的 数据最多可在134us内得到传输。 3. CAN采用非破坏性总线性仲裁技术,当多个节点同时向总线 发送信息时,优先级较低的节点会主动地退出发送,而最 高优先级的节点可不受影响地继续传输数据,从而大大节 省了总线冲突仲裁时间。 4. CAN只需通过帧滤波即可实现点对点、一点对多点及全局广 播等几种方式传送接受数据,无需专门的调度。
2. 多路传输 所谓多路传输,指在计算机局域网中,将多种信息混 合或交叉通过一个通信信道传送的方式。
传统线路与多路传输线路
3. 模块/节点 模块就是一种电子装置。简单一点的如温 度和压力传感器,复杂的如计算机(微处理 器)。传感器是一个模块装置,根据温度和 压力的不同产生不同的电压信号。这些电压 信号在计算机(一种数字装置)的输人接口 被转变成数字信号。在计算机多路传输系统 中一些简单的模块被称为节点。各节点通过 插接器连接到多路传输系统中。
车载网络技术PPT课件(共8章)第2章 CAN总线
(3)波分多路复用
波分多路复用 WDM(Wave-length Division Multiplexing)是指在光波频 率范围内,将不同波长的光波按照一定的时间间隔在同一条光导纤维内进行数据 传输的技术。
2.2 CAN总线的工作原理
2.2.1 CAN总线简介
CAN是Controller Area Network(控制器局域网)的缩写,是国际标准化 的串行通信协议。目前,CAN总线是汽车网络系统中应用最多、也最为普遍的一 种总线技术。
图2-8 计算机系统内总线线路的示意图 1—地址总线;2—数据总线;3—控制总线;CPU—中央处理器;
ROM—只读存储器;RAM—随机存储器;I—输入;O—输出
图2-9 车用计算机(电子控制单元)电路板 1—输出模块;2—输入模块;3—存储器模块;4—微处理器; 5—线圈;6—电容器;7—二极管;8—特殊模块 (特定应用)
第2章 CAN总线
2.1 数据信号及其传输
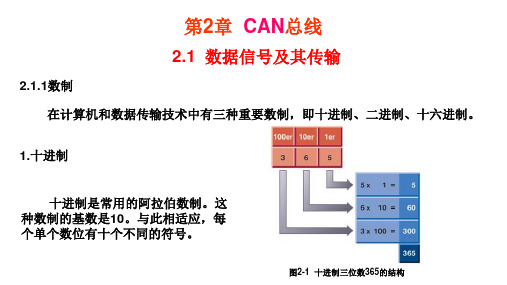
2.1.1数制 在计算机和数据传输技术中有三种重要数制,即十进制、二进制、十六进制。
1.十进制
十进制是常用的阿拉伯数制。这 种数制的基数是10。与此相适应,每 个单个数位有十个不同的符号。
图2-1 十进制三位数365的结构
2.二进制
二进制是数据处理中最常用的数制之一。在二进制中只有两个数字值:0 和1, 或接通或关闭,或高电压或低电压,即所谓的二进制符号或位。在通信领域,也把这 两个值称为逻辑0和逻辑1。
数字表示方式就是以数字形式表
示不断变化的物理量。尤其在计算机 内,所有数据都以“0”和“1”的序列 形式表示出来(二进制)。因此, “数字”是“模拟”的对立形式。
图2-4 数字信号 U—电压;t—时间
3.二进制信号
波分多路复用 WDM(Wave-length Division Multiplexing)是指在光波频 率范围内,将不同波长的光波按照一定的时间间隔在同一条光导纤维内进行数据 传输的技术。
2.2 CAN总线的工作原理
2.2.1 CAN总线简介
CAN是Controller Area Network(控制器局域网)的缩写,是国际标准化 的串行通信协议。目前,CAN总线是汽车网络系统中应用最多、也最为普遍的一 种总线技术。
图2-8 计算机系统内总线线路的示意图 1—地址总线;2—数据总线;3—控制总线;CPU—中央处理器;
ROM—只读存储器;RAM—随机存储器;I—输入;O—输出
图2-9 车用计算机(电子控制单元)电路板 1—输出模块;2—输入模块;3—存储器模块;4—微处理器; 5—线圈;6—电容器;7—二极管;8—特殊模块 (特定应用)
第2章 CAN总线
2.1 数据信号及其传输
2.1.1数制 在计算机和数据传输技术中有三种重要数制,即十进制、二进制、十六进制。
1.十进制
十进制是常用的阿拉伯数制。这 种数制的基数是10。与此相适应,每 个单个数位有十个不同的符号。
图2-1 十进制三位数365的结构
2.二进制
二进制是数据处理中最常用的数制之一。在二进制中只有两个数字值:0 和1, 或接通或关闭,或高电压或低电压,即所谓的二进制符号或位。在通信领域,也把这 两个值称为逻辑0和逻辑1。
数字表示方式就是以数字形式表
示不断变化的物理量。尤其在计算机 内,所有数据都以“0”和“1”的序列 形式表示出来(二进制)。因此, “数字”是“模拟”的对立形式。
图2-4 数字信号 U—电压;t—时间
3.二进制信号
汽车车载网络系统ppt课件

发动机
高速CAN
变速箱 变速箱
车门
低速子网
…
座椅
…
车灯
Steer-by-Wire
…
TTCAN
Brake-by-Wire
控制面板 网关
IDB-C
低速CAN
车载电话
音响设备
…
GPS
优点:减少线束,节省空间,降低成本,资源共享,增加 可靠 性和可维修性。
ppt课件
3
3. 汽车总线的分类
(1)A类网络 面向传感器执行器控制的低速网络,数据传输速率通常只有1~10kbit/s。 适用于对实时性要求不高的场合。主要应用于车身控制,如电动门窗、 中央锁、后视镜、座椅调节、灯光照明及早期的汽车故障诊断。
汽车防盗报警A类网络系统
ppt课件
4
3. 汽车总线的分类
(2)B类网络 面向独立模块间数据共享的中速网络,传输速率一般为l0~l00kbit/s。 主要应用于电子车辆信息中心、故障诊断、仪表显示、安全气囊等系统, 以减少冗余的传感器和其他电子部件。
B类CAN总线
ppt课件
5
3. 汽车总线的分类
(3)C类网络 面向高速、实时闭环控制的多路传输,最高传输速率可达1Mbit/s,主要 用于悬架控制、牵引控制、先进发动机控制、ABS等系统。
1. CAN节点结构
“大管家”
(1)数据采集、输出控制;
(2)初始化、读/写CAN控制器
“智能邮箱(存储器)” (1)供单片机存、取数据; (2)验收滤波
“转换器” 数字信号←→差分电压
ppt课件
“高速公路” 双向、串行
11
独立CAN控制器SJA1000
ppt课件
汽车车载网络技术详解最新版精品课件第1章 车载网络系统基础知识

6.比特和字节
计算机中的所有信息都以位(bit,亦称比特,是二进制数 字的最小信息单位)为单位进行存储和处理的。 1千字节(KB)= 210字节,即1 024字节 1兆字节(MB)= 220 字节,即1 024KB(1 048 576字节) l千兆字节(GB)= 230字节,即1 024MB(1 073 741 824字节) 注意:换算系数不是1 000,而是1 024。
DDB/Optical(Domestic 音频系统通信协议将DDB作为音频系统总线采 Digital Bus/Optical) 用光通信
5.6Mbit/s
C&C
MOST(Media Oriented 信息系统通信协议以欧洲为中心,由克莱斯
System Transport) 勒与BMW公司推动
IEEE1394
CAN)
同步的CAN
Byteflight
重视安全、按用途分类的控制用LAN协议通用 时分多路复用(FTDMA)
FlexRay
重视安全、按用途分类的控制用LAN协议
1Mbit/s 10Mbit/s 5Mbit/s
Robert Bosch公司 CIA
BMW公司
BMW公司Daimler Chrysler公司
(2)总线数据传输的要求 1)可靠性高 2)使用方便 3)数据密度大 4)数据传输快
(3)总线数据传输的优点 1)简化线束 2)可以进行设备之间的通信,丰富了功能。 3)通过信息共享减少传感器信号的重复数量。
数字总线信号传递方式
线束对比 a)传统线束 b)采用车载网络后的线束
3.车载网络系统的发展史
1987年12月日本车采用LAN
表1-3 几种车载网络的开发年份、采用厂家与发表年份
车载网络技术ppt课件
❖ (1)CAN总线 ❖ (2)局域网互联(LIN) ❖ (3)面向媒体的系统传输(MOST) ❖ (4)FlexRay
13
完整版PPT课件
4 各种车用总线的介绍---CAN总线
❖ CAN总线是由德国BOSCH公司为了解决汽车 中众多的控制与测试仪器之间的数据交换而开发 出的一种串行通信网络,具有短帧数据结构、非 破坏性总线仲裁技术以及灵活的通信方式适应了 汽车实时性和可靠性的要求,己经成为国际标准 (ISO11898),其应用范围也从最初的汽车电控 逐步扩展到工业控制的各个领域,成为最有前途 的现场总线之一。
物理层
(Physical)
应用层
(Application)
数据链路层
(Date link)
物理层
(Physical)
物理介质
图1 汽车局域网的参考模型
7
完整版PPT课件
2 车载网络技术介绍
目前主要的汽 车网络互联规范
德国BOSCH 最早开发推出 的欧洲规范 CAN。
(设备)节点进行相连的通信网络。现场总线控 制系统既是一个开放通信网络,又是一个全分布 控制系统。它作为智能设备的联系纽带,使系统 成为具有测量、控制、执行和过程诊断等综合能 力的网络。然而现场的环境干扰因素众多,有些 很强烈且带有突发性,这就决定了现场总线有别 于一般网络,是一个具有自已特色的新型领域。
Contents
1. 车载网络技术的发展简史
2. 车载网络技术介绍 3. 车载网络系统在汽车上的应用 4. 各种车用总线的介绍 5. 结语
10
完整版PPT课件
3 车载网络系统在汽车上的应用
❖ 网络技术在汽车上主要用于动力传动系统、车 身系统安全系统和信息系统,其应用等级如图。
13
完整版PPT课件
4 各种车用总线的介绍---CAN总线
❖ CAN总线是由德国BOSCH公司为了解决汽车 中众多的控制与测试仪器之间的数据交换而开发 出的一种串行通信网络,具有短帧数据结构、非 破坏性总线仲裁技术以及灵活的通信方式适应了 汽车实时性和可靠性的要求,己经成为国际标准 (ISO11898),其应用范围也从最初的汽车电控 逐步扩展到工业控制的各个领域,成为最有前途 的现场总线之一。
物理层
(Physical)
应用层
(Application)
数据链路层
(Date link)
物理层
(Physical)
物理介质
图1 汽车局域网的参考模型
7
完整版PPT课件
2 车载网络技术介绍
目前主要的汽 车网络互联规范
德国BOSCH 最早开发推出 的欧洲规范 CAN。
(设备)节点进行相连的通信网络。现场总线控 制系统既是一个开放通信网络,又是一个全分布 控制系统。它作为智能设备的联系纽带,使系统 成为具有测量、控制、执行和过程诊断等综合能 力的网络。然而现场的环境干扰因素众多,有些 很强烈且带有突发性,这就决定了现场总线有别 于一般网络,是一个具有自已特色的新型领域。
Contents
1. 车载网络技术的发展简史
2. 车载网络技术介绍 3. 车载网络系统在汽车上的应用 4. 各种车用总线的介绍 5. 结语
10
完整版PPT课件
3 车载网络系统在汽车上的应用
❖ 网络技术在汽车上主要用于动力传动系统、车 身系统安全系统和信息系统,其应用等级如图。
车载网络技术概述ppt课件

.
图1-4 电子点火系统组成示意图
车载网络技术概述
进入20世纪90年代,出现全面、综合的电子控制系统。
.
车载网络技术概述
3.第三阶段——整车联网层次的汽车网络化时代
1995~2010年属于整车联网层次的汽车网络化时代。采用 先进的单片机技术和车载网络技术,形成了车上的分布式、网 络化的电子控制系统。整车电气系统被连成一个多ECU、多节 点的有机的整体,使得其性能也更加完善。
.网速:4 Mbps 1Gbps=1000Mbps=1000*1000bps
车载网络技术概述
目前汽车上: 控制单元内部线路中使用并行数据传输方式, 控制单元外部传输信息则大都以串行传输方式进行。
串行数据传输既可以采用同步传输方式,也可以采用异 步传输方式。
.
车载网络技术概述 串行数据传输:同步传输方式,异步传输方式。 3.同步数据传输 使用一个共同的时钟脉冲发生器可保持发送装置和接收 装置时间管理的同步性。这种方式就是同步传输方式。
车载网络技术概述
②道路救援。
也就是说,Telematics技术整合了汽车网络技术(也包括 其他移动运输工具内部的网络技术)、无线通信技术、GPS (Global Positioning System,全球定位系统)卫星导航技 术,通过无线网络,随时给行车中的人们提供驾驶、生活、娱 乐所必需的各种信息。
.
车载网络技术概述
.
图1-11 Telematics信息交换过程示意图
车载网络技术概述
通过GPS全球卫星定位系统(图1-13) ,结合行车路 线,作电子地图与语音导航相结合的路况报导、路线指引 (图1-14) ,并能提前预报前方路口的车速限制及交通违法 摄像头的安装情况,以确保安全行车。
图1-4 电子点火系统组成示意图
车载网络技术概述
进入20世纪90年代,出现全面、综合的电子控制系统。
.
车载网络技术概述
3.第三阶段——整车联网层次的汽车网络化时代
1995~2010年属于整车联网层次的汽车网络化时代。采用 先进的单片机技术和车载网络技术,形成了车上的分布式、网 络化的电子控制系统。整车电气系统被连成一个多ECU、多节 点的有机的整体,使得其性能也更加完善。
.网速:4 Mbps 1Gbps=1000Mbps=1000*1000bps
车载网络技术概述
目前汽车上: 控制单元内部线路中使用并行数据传输方式, 控制单元外部传输信息则大都以串行传输方式进行。
串行数据传输既可以采用同步传输方式,也可以采用异 步传输方式。
.
车载网络技术概述 串行数据传输:同步传输方式,异步传输方式。 3.同步数据传输 使用一个共同的时钟脉冲发生器可保持发送装置和接收 装置时间管理的同步性。这种方式就是同步传输方式。
车载网络技术概述
②道路救援。
也就是说,Telematics技术整合了汽车网络技术(也包括 其他移动运输工具内部的网络技术)、无线通信技术、GPS (Global Positioning System,全球定位系统)卫星导航技 术,通过无线网络,随时给行车中的人们提供驾驶、生活、娱 乐所必需的各种信息。
.
车载网络技术概述
.
图1-11 Telematics信息交换过程示意图
车载网络技术概述
通过GPS全球卫星定位系统(图1-13) ,结合行车路 线,作电子地图与语音导航相结合的路况报导、路线指引 (图1-14) ,并能提前预报前方路口的车速限制及交通违法 摄像头的安装情况,以确保安全行车。
8汽车车载网络技术简介

8.4.3 LIN的网络结构
汽汽车车发发动动机机电电控控技技术术
2019年3月
再见
等。
2019年3月
汽汽车车发发动动机机电电控控技技术术
8.2.3 C类网络协议标准
C类是面向高速、实时闭环控制的多路传 输网,位速率在125kbit/s~1Mbit/s之间,主 要用于与汽车安全相关,以及实时性要求比 较高的地方,如牵引控制、发动机控制、自 动变速器、ABS/ASR、安全气囊、主动悬 架、巡航系统、电动转向系统、故障诊断系 统及组合仪表信号的采集系统等。在C类标 准中,欧洲的汽车制造商基本上采用的都是 高速通信的CAN总线标准ISO11898。
选择数据的传输途径及中转。例如;各单元之间的数据 交换及地址管理
将从物理层获得的信号(字符集)汇总成具有某种意义 的数据,提供控制顺序,以便对控制传输错误等的数据 加以传输。例如:①访问时的方法及数据形式;②通信 方式、连接控制方式、同步方式、错误检测方式;③响 应方式、通信方式、帧的构成;④组帧方式
汽汽车车发发动动机机电电控控技技术术
8.2 车载网络通信协议 通信协议是指通信双方控制信息交
换规则的标准、约定的集合,即数据 在总线上的传输规则。在汽车上,要 实现车内各ECU之间的通信,必须制 定规则,即通信的方法、通信时间、 通信内容,保证通信双方能相互配合, 使通信双方能共同遵守、可接受的一 组规定和规则。
车载网络结构示意图
汽汽车车发发动动机机电电控控技技术术
8.1.3 常用基本术语
1. 数据总线 数据总线是模块间运行数据的通道,即所谓 的信息高速公路。数据总线可以实现在一条数 据线上传递的信号能被多个系统(控制单元) 共享,从而最大限度地提高系统整体效率,充 分利用有限的资源。
车载网络技术概述 ppt

电机晶体管电压调节器和晶体管点火装置等开始装备汽车, 而- 且电子控制装置又逐步实现了10由分立元件向集成化的过渡。
车载网络技术概述
这一阶段,装备汽车的其
他电子装置还有转向系统电子
式闪光器、电子控制式喇叭、
电子式间歇刮水控制器、数字
时钟及高能点火(HEI)线圈
和- 集成电路点火系统等。
11
车载网络技术概述
1.1.1 汽车网络技术的发展历程
汽车电子技术在经历了零部件层次的汽车电器时代、子 系统层次的单片机(汽车电脑)控制时代之后,已经开始进 入汽车网络化时代,并向汽车信息化时代迈进。
按照电子产品和电子控制系统的技术特点,可将汽车电 子技术的发展粗略划分为四个阶段。
1.第一阶段——零部件层次的汽车电器时代 1965~1980年属于零部件层次的汽车电器时代。汽车发
-
20
图1-12 Telematics的主要功能
车载网络技术概述
通过GPS全球卫星定位系统(图1-13) ,结合行车路 线,作电子地图与语音导航相结合的路况报导、路线指引 (图1-14) ,并能提前预报前方路口的车速限制及交通违法 摄像头的安装情况,以确保安全行车。
-
图1-13 GPS全球卫2星1 定位系统
车载网络技术概述
车载网络技术概述
学习内容
1
汽车网络技术的发展
2
汽车网络技术的应用
3
汽车网络标准与协议
-
2
车载网络技术概述
-
3
车载网络技术概述
一、数据传输方式
根据发送装置向接收装置传输信息时各字节的传输方式 不同,数据传输方式分为并行传输和串行传输两种形式。 1.并行传输
-
图2-13 并4行传输
车载网络技术概述
这一阶段,装备汽车的其
他电子装置还有转向系统电子
式闪光器、电子控制式喇叭、
电子式间歇刮水控制器、数字
时钟及高能点火(HEI)线圈
和- 集成电路点火系统等。
11
车载网络技术概述
1.1.1 汽车网络技术的发展历程
汽车电子技术在经历了零部件层次的汽车电器时代、子 系统层次的单片机(汽车电脑)控制时代之后,已经开始进 入汽车网络化时代,并向汽车信息化时代迈进。
按照电子产品和电子控制系统的技术特点,可将汽车电 子技术的发展粗略划分为四个阶段。
1.第一阶段——零部件层次的汽车电器时代 1965~1980年属于零部件层次的汽车电器时代。汽车发
-
20
图1-12 Telematics的主要功能
车载网络技术概述
通过GPS全球卫星定位系统(图1-13) ,结合行车路 线,作电子地图与语音导航相结合的路况报导、路线指引 (图1-14) ,并能提前预报前方路口的车速限制及交通违法 摄像头的安装情况,以确保安全行车。
-
图1-13 GPS全球卫2星1 定位系统
车载网络技术概述
车载网络技术概述
学习内容
1
汽车网络技术的发展
2
汽车网络技术的应用
3
汽车网络标准与协议
-
2
车载网络技术概述
-
3
车载网络技术概述
一、数据传输方式
根据发送装置向接收装置传输信息时各字节的传输方式 不同,数据传输方式分为并行传输和串行传输两种形式。 1.并行传输
-
图2-13 并4行传输
车载网络技术(2)PPT课件
•确定由实际要使用的LLC子层接收哪一个报文。
•为恢复管理和过载通知提供手段。
MAC子层的作用主要是传送规则,也就是控制帧结构、 执行仲裁、错误检测、出错标定、故障界定。位定时的一些 普通功能也可以看作是MAC子层的一部分。
物理层的作用是在不同节点之间根据所有的电气属性进行 位的实际传输。物理层定义信号是如何实际地传输的,因此 涉及到位时间、位编码、同步的解释。技术规范没有定义物 理层的驱动器/接收器特性,以便允许根据它们的应用,对 发送媒体和信号电平进行优化。
控制单元之间的数据交换就是通过这两条导线来完成的, 这些数据可能是发动机转速、油箱油面高度及车速等。
2.2 CAN协议分层结构和功能
逻辑链路子层LLC
接收滤波
超载通知
恢复管理
数 据 介质访问控制子层MAC
链
数据包装/解包
路 层
帧编码
介质访问管理
错误监测
出错标定
应答
串并转换
物 理
位编码/解码 位定时
层
同步
驱动器接收器特性
监控器 故障界定 总线故障管理
逻辑链路控制子层(LLC)的作用范围如下:
•为远程数据请求以及数据传输提供服务。
2.信息路由 在CAN系统中,一个CAN节点不使用有关系统结构的
任何信息(如站地址)。包含一些重要概念: 系统灵活性——节点可在不要求所有节点及其应用层
改变任何软件或硬件的情况下,被接于CAN网络。 多点传送——由于采用了报文滤波,所有节点均可接
收报文,并同时被相同的报文激活。 数据相容性——在CAN网络内,可以确保报文同时被
二、CAN总线的基本原理
CAN总线是一种串行数据通信协议, 其 通信接口中集成了CAN协 议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包 括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
•为恢复管理和过载通知提供手段。
MAC子层的作用主要是传送规则,也就是控制帧结构、 执行仲裁、错误检测、出错标定、故障界定。位定时的一些 普通功能也可以看作是MAC子层的一部分。
物理层的作用是在不同节点之间根据所有的电气属性进行 位的实际传输。物理层定义信号是如何实际地传输的,因此 涉及到位时间、位编码、同步的解释。技术规范没有定义物 理层的驱动器/接收器特性,以便允许根据它们的应用,对 发送媒体和信号电平进行优化。
控制单元之间的数据交换就是通过这两条导线来完成的, 这些数据可能是发动机转速、油箱油面高度及车速等。
2.2 CAN协议分层结构和功能
逻辑链路子层LLC
接收滤波
超载通知
恢复管理
数 据 介质访问控制子层MAC
链
数据包装/解包
路 层
帧编码
介质访问管理
错误监测
出错标定
应答
串并转换
物 理
位编码/解码 位定时
层
同步
驱动器接收器特性
监控器 故障界定 总线故障管理
逻辑链路控制子层(LLC)的作用范围如下:
•为远程数据请求以及数据传输提供服务。
2.信息路由 在CAN系统中,一个CAN节点不使用有关系统结构的
任何信息(如站地址)。包含一些重要概念: 系统灵活性——节点可在不要求所有节点及其应用层
改变任何软件或硬件的情况下,被接于CAN网络。 多点传送——由于采用了报文滤波,所有节点均可接
收报文,并同时被相同的报文激活。 数据相容性——在CAN网络内,可以确保报文同时被
二、CAN总线的基本原理
CAN总线是一种串行数据通信协议, 其 通信接口中集成了CAN协 议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包 括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
32车载网络技术--车载网络系统课件

5、国际标准化组织(ISO)为网络通信定义了一个参考模型,称为 开放式系统互连参考模型(OSI),简称OSI模型。OSI的体系结构定 义了一个7层模型,从下到上分别为物理层、数据链路层、网络层、 传输层、会话层、表示层和应用层。
汽车局域网要传输的信息大多是传感器、执行器和开关信息,数据 较短,同时由于网络多采用总线型,所以车载网络的体系结构相对 简单一些,主要有应用层、数据链层和物理层。
图3-9是汽车车载网络系统组成的拓扑图,它由动力CAN总线、 舒适CAN总线和信息MOST总线联网组成,网关是它们的连接点。在舒 适CAN总线下还有一个辅助的LIN总线。
三、车载网络的分类
目前,绝大多数车用总线被美国汽车工程师协 会(SAE)下属的汽车网络委员会按照协议特性分 为A、B、C三类。也有其他的分类方法。
6、网络上常用的网络传输介质可分为两类:一类是有线的;一类是 无线的。有线传输介质主要有同轴电缆、双胶线和光纤;无线传输 介质主要有无线电波和红外线。
7、车载网络系统具有减轻整车重量、节约成本、质量可靠和增大开 发余地等优点。
8、车载网络采取基于串行数据通信的体系结构,车载网络主要由电 控单元、数据总线、网络、网络协议、网关等组成。
2. B类总线和协议
B类是面向独立模块间数据共享的中速网络,位速率在10~125 Kbit/s,主要应用于车身电子舒适性模块、仪表显示等系统。
B类常用的总线是CAN总线。CAN总线是一种串行数据通信协议,它是 一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通 信速率可达1 Mbit/s。
9、车载总线按特性分为A(低速)、B(中速)、C(高速)三类。A 类常用的总线是LIN总线;B类常用的总线是CAN总线;C类总线有高 速CAN总线、安全总线、X-by-Wire总线、诊断系统总线标准和多媒 体系统总线。