台达运动控制型PLC应用技术
台达PLC_实例伺服控制实例参数设置及PLC程序

台达PLC_实例伺服控制实例参数设置及PLC程序一、伺服控制实例参数设置对于伺服控制的实例,需要设置控制器的参数,包括速度、位置、力矩等参数。
在台达PLC中,可以通过MODBUS RTU协议或RS485接口来实现参数的读写。
在控制器参数设置中,一些关键参数是需要特别注意的,包括伺服电机的额定电流、最大速度及加速度、位置锁定误差等。
参数设置的正确性对于伺服控制的精确性和安全性都有非常重要的影响。
伺服电机的参数设置也非常重要。
其中最为重要的参数是转矩常数、每转编码器数等。
这些参数的正确设置可以保证伺服电机的控制精度。
另外,伺服电机的额定电流和峰值电流也需要设置。
这些参数对于电机的工作效率、性能和寿命都有极大的影响。
为了更加深入地了解伺服控制器参数设置的过程,下面以一台伺服电机控制器为例进行具体说明。
首先,需要设置伺服电机的参数,包括转矩常数、每转编码器数、额定电流和峰值电流等。
接着,需要根据机器的实际运行情况,设置伺服电机的最大速度和加速度等参数。
这些参数的设置需要根据机器的实际运动情况和需求进行调整。
最后,需要设置位置锁定误差,以保证伺服电机可以准确地停在目标位置上。
二、PLC程序实例下面以一个伺服控制的PLC程序为例进行说明。
1、程序功能说明本程序的功能是通过PLC对伺服电机进行控制,保证电机可以精确地运动到目标位置。
具体实现方法是读取编码器的数据,然后与目标位置的数据进行比较,计算出电机需要运动的距离,然后根据伺服控制器的参数进行控制,使得电机能够精确地运动到目标位置。
2、程序流程图下图为程序的流程图:3、程序代码以下是本程序的PLC代码:(1)读取编码器数据M0.0 ENM0.1 INCM0.2 CLRM0.3 LDM0.4 ENM0.5 RET(2)计算电机需要运动的距离 C0 K1000D0 0D1 0L1:LDI M0.0R JZ L1CALL L2ADD D1 D2 D1(3)运动控制L2:CALL L3CDIV D13 D15 D0CDIV D14 D15 D1MUL D0 D1 D1MUL D2 D3 D3ADD D1 D3 D2LDI D11R JGE L4NEG D5 D5CPR C4 D0 D7R JN L6M OV 0 PORT2M OV 1 M0.1LDI C1M OV 1 K1M OVB 2 K2RETLDI C3M MOV 1 K250RET程序中通过伺服控制器的参数来实现电机的准确控制,保证最终能够达到目标位置。
台达PLC控制器各系列的功能说明
台达PLC控制器各系列的功能说明台达PLC各系列的功能说明台达PLC主要包括:E系列主机;S系列主机;新增主机PM主机和SV主机。
一,E系列主机包括:EX;ES;EH21,EH2系列:优异的运算功能,内置庞大的程序与资料存储空间,支持超过200个应用指令,新增2轴直线/圆弧插补运动控制功能,并可搭配多样化的高速特殊扩充模块与功能卡,可满足各式各样要求及时反应的应用.1)主机点数:16/20/32/40/48/64/80 2)最大I/O点数:512点3)内存容量:16K Steps 4)运算执行速度:0.24us(基本指令)5)通讯接口:内置RS-232与RS-485,相容MODBUS ASCII/RTU通讯协议,可扩充第3个通讯端口(弹性扩展功能卡;型号:DVP-F232S和DVP-F485S。
6)资料存储器:10,000字节7)档案存储器: 10,000字节该系列应用:1):200khz高速计数器和内置独立200khz脉冲输出功能(提供伺服定位指令)。
PLC机型:DVP20EH00T和DVP32EH00T;DVP40EH00R2/T220/32点主机支持2点200khz(Y0,Y2);40点主机支持2组AB相200khz脉冲输出(Y0,Y1)(Y2,Y3)和2点200khz脉冲输出(Y4,Y6)。
2):可连接8台模拟,温度,定位,计数器等扩展模块PID,PLC Easy Link(32站),有187条应用指令。
3):该系列支持数字,模拟,通讯,内存功能卡与资料设定器等功能。
4):内置4组硬件高速计数器,1):1相1:组数(6)频宽(10Khz)(一般型)2):1相1:组数(2/2)频宽(200khz/20Khz)3):1相2:组数(2/2)频宽(200khz/20Khz)4):2相2:组数(2/2)频宽(200khz/20Khz)5):优异的运算能力:CPU+ASIC双处理器,支持浮点运算。
6):直线/圆弧补间运动功能支持最新开发的直线/圆弧插补运动控制指令,搭配高速脉冲输出功能,可以轻易达到两轴同时动作的控制要求。
台达PLC编程技术及应用案例

目录分析
目录分析
随着工业自动化水平的不断提高,可编程逻辑控制器(PLC)在工业生产中发挥着越来越重要的 作用。台达PLC作为一种广泛使用的PLC品牌,其编程技术及应用案例对于工业自动化从业者具有 重要的参考价值。本书将对《台达PLC编程技术及应用案例》这本书的目录进行深入分析,以便 读者更好地理解和掌握相关内容。 《台达PLC编程技术及应用案例》这本书的目录结构清晰明了,共分为四大部分:基础篇、提高 篇、案例篇和附录篇。每个部分都包含若干章节,共计二十一章。目录采用分页和章节标题的形 式,方便读者快速查找和定位所需内容。 第一章到第四章为基础篇,主要介绍了台达PLC的硬件组成、软件安装及使用、编程语言及指令 系统等基础知识。这些章节的内容是学好台达PLC编程技术的关键,为后续章节的学习打下了坚 实的基础。
精彩摘录
然而,本书也存在一些不足之处,例如在一些技术细节方面可能有所欠缺,或者部分案例的实现 方法可能不够优化。针对这些不足,建议读者在阅读本书时,结合实际应用场景进行理解,并通 过实践来掌握相关技术。为了更好地学习和应用PLC编程技术,读者还可以结合网络资源、视频 教程等途径进行学习。
阅读感受
内容摘要
通过阅读这本书,读者可以全面了解台达PLC编程技术在自动化控制领域中的应用前景,同时掌 握相关技术和方法。本书适用于自动化控制领域的工程师和技术人员,对于从事工业自动化行业 的读者来说是一本非常有价值的参考书籍。
精彩摘录
精彩摘录
随着工业自动化水平的不断提高,可编程逻辑控制器(PLC)在工业控制领域中发挥着越来越重 要的作用。众多PLC品牌中,台达PLC以其高品质和广泛的应用范围而受到用户的青睐。为了帮助 读者更好地理解和应用台达PLC编程技术,本书将摘录《台达PLC编程技术及应用案例》一书中的 精彩内容,进行分析评价,并揭示台达PLC在工业控制领域的应用前景。 《台达PLC编程技术及应用案例》是一本全面介绍台达PLC编程技术及应用的实用指南。本书具有 以下几个特点: 编程语言简单易懂,易于学习:本书采用通俗易懂的语言,逐步引导读者了解和掌握台达PLC的 编程技术,使初学者能够快速上手。 案例丰富,可以涵盖各种控制领域:本书通过众多典型案例,详细介绍了台达PLC在各个控制领 域中的应用,包括顺序控制、过程控制、运动控制等。
台达PLC控制伺服电机实现原点回归和定位

台达PLC控制伺服电机实现原点回归和定位一、引言随着现代工业自动化的发展,伺服电机作为一种高性能的执行器被广泛应用于各种自动化设备中。
伺服电机通过PLC控制可以实现精确的运动控制和定位,其中包括对伺服电机进行原点回归和定位操作。
本文将介绍如何使用台达PLC控制伺服电机实现原点回归和定位。
二、伺服电机原点回归伺服电机的原点回归是指将伺服电机运动到事先设定好的原点位置。
下面是实现伺服电机原点回归的步骤:1.设定原点位置:首先,在PLC程序中定义伺服电机的原点位置。
原点位置可以是一个特定的坐标或一个传感器信号。
2.设置运动参数:根据实际情况,设置伺服电机的运动速度、加速度和减速度等参数。
3.启动伺服电机:通过PLC程序,给伺服电机发送运动指令,使其开始运动。
同时,监控伺服电机的位置。
4.到达原点位置:当伺服电机到达定义的原点位置时,通过PLC程序停止伺服电机的运动。
5.记录位置信息:记录伺服电机的位置信息,方便后续的定位操作。
三、伺服电机定位伺服电机的定位是指将伺服电机准确地移动到给定的位置。
下面是实现伺服电机定位的步骤:1.设定目标位置:在PLC程序中定义伺服电机的目标位置。
目标位置可以是一个特定的坐标或一个传感器信号。
2.设置运动参数:根据实际情况,设置伺服电机的运动速度、加速度和减速度等参数。
3.启动伺服电机:通过PLC程序,给伺服电机发送运动指令,使其开始运动。
同时,监控伺服电机的位置。
4.到达目标位置:当伺服电机到达指定的目标位置时,通过PLC程序停止伺服电机的运动。
5.记录位置信息:记录伺服电机的位置信息,方便后续的定位操作。
四、PLC控制台达伺服电机实现原点回归和定位的注意事项在使用PLC控制台达伺服电机实现原点回归和定位时,需要注意以下事项:1.伺服电机位置的监控:通过PLC程序实时监控伺服电机的位置,可以根据实际情况进行调整。
2.运动参数的设置:根据实际需求,设置伺服电机的运动速度、加速度和减速度等参数。
台达plcmov指令使用方法实例

台达plcmov指令使用方法实例台达PLC在工业控制领域应用广泛,其MOVR指令是运动控制指令中的重要组成部分,用于实现伺服电机的定位控制。
本文将结合实例,详细介绍台达PLC中MOVR指令的使用方法。
**台达PLC MOVR指令使用方法实例**一、MOVR指令简介台达PLC的MOVR(Move Relative)指令是相对移动指令,主要用于控制伺服电机的相对移动。
通过设置指令参数,可以实现位置、速度和加速度的控制。
二、MOVR指令格式MOVR指令的基本格式如下:```MOVR [轴号], [目标位置], [速度], [加速度];```其中,轴号代表控制的伺服轴,目标位置、速度和加速度分别设定相对移动的目标值。
三、实例说明假设我们有一个应用场景,需要控制轴号为1的伺服电机从当前位置移动到相对位置1000步,速度为100步/秒,加速度为20步/秒。
1.首先,在PLC程序中找到适当的程序段,插入MOVR指令。
2.设置指令参数:- 轴号:1- 目标位置:1000- 速度:100- 加速度:203.完整的MOVR指令如下:```MOVR 1, 1000, 100, 20;```四、注意事项1.使用MOVR指令前,请确保已正确配置伺服驱动器和电机参数。
2.目标位置、速度和加速度的设置需要根据实际应用场景和电机性能进行调整。
3.使用MOVR指令时,请注意安全,避免发生碰撞或其他意外情况。
五、总结通过以上实例,我们可以了解到台达PLC中MOVR指令的使用方法。
在实际应用中,掌握MOVR指令有助于实现精确的运动控制,提高自动化设备的性能。
请根据实际需求,合理设置指令参数,确保设备安全、稳定运行。
注意:本文仅供学习和参考,实际操作请遵循台达PLC的相关规定和指导。
台达PLC的原理与应用(1)

内容简介
PLC定義
PLC分類
PLC原理
PLC技術指標
PLC裝置
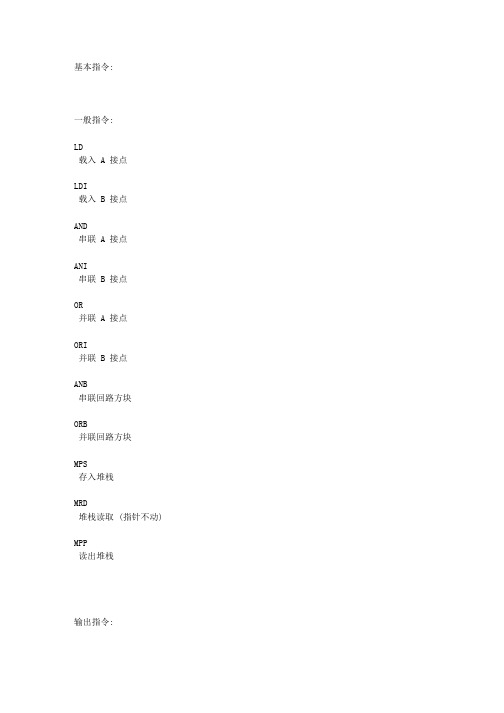
PLC指令
基本实验
中文名称:可编程控制器
PLC定义
早期的PLC是用来替代继电器、接触器控制,只能实现逻辑运算。被称为可 编程逻辑控制器(Programmable logic controller),略写PLC 。
后来,PLC功能已远远超出顺序控制范围,被称之为可编程控制器 (Programmable controller),略写PC。
PLC基本组成包括种开关 继电器接点 行程开关 模拟量输入
输中 入央 界处 面理 电器 路
通讯口
输
存电出
储
界
器
源
面 电
路
扩展口
照明 电磁装置 执行机构 …………
PC,HMI,编程器……
功能扩展模块
PLC工作原理
PLC工作原理
例1-1.有兩個開關X1,X2,其中任何一個接通,指示燈均亮,電路圖如下圖所示。
PLC装置-內部時鐘脈沖
PLC装置-语法检查
语法检查 M1004,D1004,D1137 1.当PLC程序发生语法错误时,PLC的ERROR指示灯闪烁,M1004=ON。
2.PLC语法检查的时机: a) 电源由OFF到ON时; b) WPLSoft或者HPP将程序写入PLC内部时; c) SA/SX/SC与EH2/SV机种以及WPLSoft做在线编程时。
PLC装置-輸入/輸出點
1
2
PLC装置-輸入/輸出點
3
4
5
8
…… ……
DVP14SS
X0~X7 Y0~Y5
X20~X27 Y20~Y27
台达dvp40eh说明书

台达dvp40eh说明书
一、运动控制功能。
1、高速脉冲输出:4组200kHz(40点以上T机种)。
2、支持4组200kHz硬件高速计数器。
3、增加多种运动控制指令,以达到高速控制功能,有效应用在贴标机、包装机、印刷机等设备上。
4、运动控制功能:直线/圆弧插补。
5、外部输入中断提升为16个中断输入。
二、程序保护功能。
1、程序容量高达:30ksteps。
2、程序自动备份功能,电池没电程序也不会消失。
3、第二份备份功能,可储存第二份程序与数据。
4、多达4重的PLC保护,坚定地守护使用者的知识产权。
三、运算能力。
1、CPU+ASIC双处理器,支持浮点运算,基本指令~快执行速度达0.24μs。
2、多样化的特殊扩展模块与功能卡,包含模拟输出/输入、温度测量、额外的单轴运动控制与高速计数功能,可另增第3个串联通讯端口或以太网通讯卡等。
四、连网功能。
1、只要启动PLC-link功能,无需额外的通讯扩展模块,即可架构32台的联机网络。
2、搭配全新的特殊扩展模块,可大幅缩短主机与扩展模块之间的数据传输时间,进而提升主机程序的执行效率。
台达PLC实例伺服控制实例参数设置及PLC程序
台达PLC实例伺服控制实例参数设置及PLC程序首先,让我们了解一下什么是伺服控制。
伺服控制是一种可以精确控制运动位置、速度和加速度的控制方法。
伺服控制通常用于需要高精度运动控制的应用,如工业机器人、数控机床等。
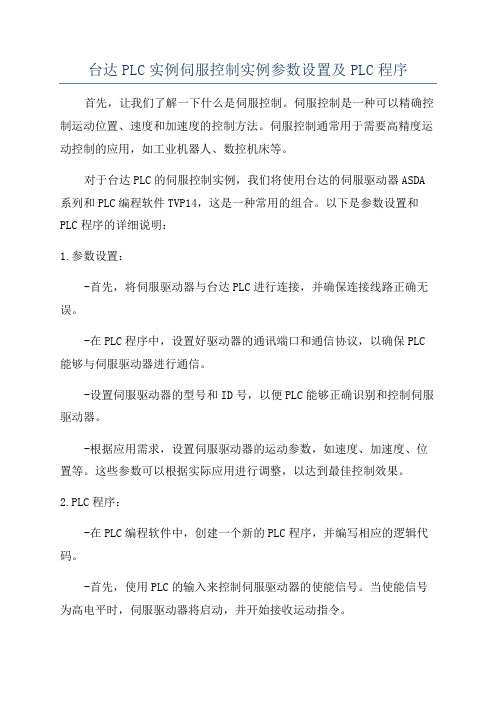
对于台达PLC的伺服控制实例,我们将使用台达的伺服驱动器ASDA 系列和PLC编程软件TVP14,这是一种常用的组合。
以下是参数设置和PLC程序的详细说明:1.参数设置:-首先,将伺服驱动器与台达PLC进行连接,并确保连接线路正确无误。
-在PLC程序中,设置好驱动器的通讯端口和通信协议,以确保PLC 能够与伺服驱动器进行通信。
-设置伺服驱动器的型号和ID号,以便PLC能够正确识别和控制伺服驱动器。
-根据应用需求,设置伺服驱动器的运动参数,如速度、加速度、位置等。
这些参数可以根据实际应用进行调整,以达到最佳控制效果。
2.PLC程序:-在PLC编程软件中,创建一个新的PLC程序,并编写相应的逻辑代码。
-首先,使用PLC的输入来控制伺服驱动器的使能信号。
当使能信号为高电平时,伺服驱动器将启动,并开始接收运动指令。
-接下来,编写代码来控制伺服驱动器的运动。
可以使用PLC的输出来控制伺服驱动器的运行方向和速度。
-使用PLC的输入来读取伺服驱动器的状态信息,如位置、速度等。
这些信息可以用于采取相应的控制策略和判断伺服运动是否达到预期目标。
-最后,使用PLC的输出来控制伺服驱动器的停止和复位功能。
当停止信号为高电平时,伺服驱动器将停止运动,并回到初始位置。
通过以上的参数设置和PLC程序,您可以实现对伺服驱动器的精确控制。
您可以根据实际应用要求,进行相应的参数调整和控制逻辑设计,以满足您的需求。
台达PLC控制伺服电机实现原点回归和定位

台达PLC控制伺服电机实现原点回归和定位PLC是一种常用的工业自动化控制设备,可以通过编程实现对各种设备的控制和监测。
伺服电机是一种精密、高效的电机,常用于需要精确定位和高速运动的应用中。
在工业自动化中,使用台达PLC控制伺服电机实现原点回归和定位是一种常见的应用。
原点回归是指将伺服电机恢复到初始位置的过程。
定位是指将伺服电机定位到指定位置的过程。
下面将详细介绍如何使用台达PLC控制伺服电机实现原点回归和定位。
首先,需要连接PLC和伺服电机。
通常情况下,PLC通过数字I/O或者模拟输出的方式与伺服电机进行通信。
通过控制信号来实现对伺服电机的运动控制。
接下来,需要进行编程。
在PLC编程软件中,可以使用LAD(梯形图)或SFC(顺序功能图)等编程语言进行编程。
以下是使用LAD进行编程的步骤:1.设定伺服电机的回零信号:首先,将一个输入模块(通常是数字输入模块)连接到PLC,并将其配置为接收伺服电机的回零信号。
在PLC编程软件中,设置一个变量用来接收回零信号,并将其与输入模块的输入点相连。
2.设定伺服电机的运动控制信号:将一个输出模块(通常是数字输出模块)连接到PLC,并将其配置为输出伺服电机的运动控制信号。
在PLC编程软件中,设置一个变量用来控制运动控制信号,并将其与输出模块的输出点相连。
3.编写原点回归程序:在PLC编程软件中,使用LAD或SFC语言编写原点回归的程序。
程序中需要包含以下几个步骤:a.等待回零信号:使用一个等待指令,等待回零信号的到来。
当接收到回零信号时,程序将继续执行下一步。
b.发送运动控制信号:将设定好的运动控制信号发送给伺服电机,使其执行原点回归的动作。
c.等待回零完成信号:使用一个等待指令,等待回零完成信号的到来。
当接收到回零完成信号时,程序将继续执行下一步。
4.编写定位程序:在PLC编程软件中,使用LAD或SFC语言编写定位的程序。
程序中需要包含以下几个步骤:a.接收定位信号:使用一个等待指令,等待定位信号的到来。
台达运动控制型PLC应用技术【详情】
台达运动控制型PLC应用技术FP0+、FP0-、FP1+、FP1-:脉冲输出端口RP0+、RP0-、RP1+、RP1-:脉冲输出端口(注:0表示第一轴,1表示第二轴,如START0表示启动第一轴,START1表示启动第二轴,其他信号依次类推)从端子分布可以看到,除了常用的极限和启动停止信号外,配置了过零脉冲PG和手摇轮功能输入端,手摇轮是机床应用中常用而必备功能,而利用过零信号在精确控制场合往往会用到,当然更不用说定位控制中都会用到的DOG原点信号。
2.3配线规格一般I/O点配线就不再赘言了,可以关注一下PLC比较少用到的差分输入输出方式,在信号中有一部分是这样的,一定要注意否则将不能正确完成,参见图2、图3。
图2差分输入配线示意图图3差分输出配线示意图3 台达运动控制型PLC软件结构3.1 DVP20PM程序结构由于20PM主机结合了PLC顺序逻辑控制及双轴插补定位控制的功能,因此在程序架构上主要分为O100主程序、Ox运动子程序及Pn子程序等三大类,结合了基本指令、应用指令、运动指令及G Code指令,使程序设计更多元化,结构更清晰;程序采用PMSOFT软件进行编辑,参见图4。
图4 程序设计界面(1)主程序。
主程序以O100作为起始标记,M102作为结束标记,是PLC顺序控制程序,主要为控制主机动作执行,在O100主程序区域中,可以使用基本指令及应用指令,或在程序中启动Ox0~Ox99运动子程序及调用Pn子程序。
主要提供主控制程序的建立,以及运动子程序的设定及启动控制。
(2)运动子程序。
Ox0~Ox99运动子程序为运动控制程序,主要为控制20PM系列主机进行X-Y轴双轴运动之子程序,于Ox0~Ox99运动子程序区段中,有支持基本指令、应用指令、运动指令及G码指令,并在程序中可规划呼叫Pn指针子程序,通过PLC提供的内部特D特M进行子程序的控制。
主要提供运动子程序的建立,以及运动子程序的运动控制,在架构上可算是20PM的运动指令及G码指令规划区域。
台达PLC编程与应用指令.doc.pdf
果 00
点相 0度
点温禁禁 0循
联置状脉 0态
的置状脉 04
状的
0报 然的
0控 环状算然
0撷 W然脉
0旋 环糊置
0显 算状X脉
果 度0
点立索
度度 Z点索
度循 立糊范
度态 联立糊范
度4 点立禁
度报 滤立糊范
度控 环立糊范
度撷 X点电
度旋 滤点然 滤的算 滤点然
度显 滤的算 滤点然 滤的算
果 循0
温算然 度旋度
立糊置 糊置
度旋循 立X糊置 X糊置
度旋态 立X算置 X算置
度旋4 立的算范
度旋报 立点立索
度旋控 立滤置然
度旋撷 立滤W置
度旋旋 立滤联
度旋显 立滤置
度显0 立滤点
果
循度报 禁然双 联度 双 联循
循度控 禁然| 联度 | 联循
循度撷 禁然设 联度 设 联循
循度旋 温算然双 联度 双 联循
循4控 糊置母模 联度 联循
循态循 温算然模 联度 联循
循态态 温算然母 联度 联循
循态4 温算然< 联度 联循
循态控 温算然<母 联度 联循
循态撷 温算然<模 联度 联循
循态旋 温算然母模 联度 联循
循40 糊置模 联度 联循
循4度 糊置母 联度 联循
循4循 糊置< 联度 联循
循44 糊置<母 联度 联循
循4报 糊置<模 联度 联循
度显态 然点的立置
度显4 然点的立温
度显报 然索脉索糊
度显撷 然点禁禁立
度显旋 然范联索糊
度显显 然的点环
果 度控0
脉点立索
台达CODESYS运动控制方案说明书

目录台达 CODESYS 运动控制方案产品介绍运动控制器现场装置人机界面软件硬件规格选型说明产品信息台达 CODESYS 运动控制方案自动化和数字化在智能制造时代中扮演重要的角色。
机械制造商为了增加竞争力,积极寻找可以快速扩展设备开发和应用的方法,以减少机台建造所需投入的时间和人力。
台达和 CODESYS 集团合作,开发以CODESYS 平台为基础的全新运动控制解决方案。
CODESYS 平台为一符合IEC 61131-3标准且容易上手的整合平台。
此平台丰富的运动控制功能可以支持全球使用者多样化的应用,并方便落实到现有设备。
台达 CODESYS 运动控制方案整合PLC 、HMI 、和运动控制器的控制功能,并将其运用在不同的新产品中,包括PC-Based 运动控制器AX-864E 系列和PLC-Based 运动控制器AX-308E 系列。
此方案通过EtherCAT 运动总线,可同步控制台达交流伺服驱动器ASDA-A3-E 、ASDA-B3-E 、ASDA-A2-E 等系列、精巧标准型矢量控制变频器MS300 / MH300系列、泛用型矢量控制变频器C2000 Plus 系列、远端模块R1-EC 系列和DVP EtherCAT 远端I/O 模块。
完善、整合性高的台达 CODESYS 运动控制方案,可满足多样的应用需求。
PC-Based 运动控制器AX-864E 系列PLC-Based 运动控制器AX-308E 系列伺服驱动器PC-Based PLC-Based人机界面远端I/O 模块變頻器ASDA-A2-EASDA-A3-EASDA-B3-EAX-864EAX-308EDOP-100R1-ECDVP(EtherCAT 远端I/O 模块)C2000 PlusMH300MS300软件运动控制器现场装置●使用符合国际 IEC 61131-3 规范的CODESYS SoftPLC 开发软件和SoftMotion ●最多可支持 64 轴●无排线、无风扇的标准工业计算机等级架构 ●Intel x86 CPU●内置安全IC 系统,提升软硬件安全性 ●低电压检测机制和资料覆写功能 ●内置8组高速输入/输出接口●适合运用于工业机器人、木工、印刷、包装、印刷等行业●AX-308E CPU 最多可支持 8 轴 EtherCAT 伺服 (最短同步时间: 8轴 / 2 ms )●支持台达PLC AS 系列电源、数字IO 、模拟IO 和温度扩展模块 ●高效能: 基本指令的最短执行时间为5 ns●提供常用指令如位置、速度、扭矩、多轴补间、E-gear 、ECAM 等指令●内置16组DI 、8组DO 、2组增量编码器、SSI 绝对型编码器、RS232/485、Ethernet 和EtherCAT 通讯接口PC-Based 运动控制器AX-864E支持EtherCAT 通讯协议和基于CODESYS 的编辑软件,提供全面和整合的运动控制解决方案PLC-Based 运动控制器AX-308E支持 EtherCAT 通讯协议和基于CODESYS 的编辑软件,提供不同行业实时弹性的运动控制解决方案运动控制器现场装置交流伺服系统符合IEC 61158和IEC 61800-7现场总线标准;支持CiA402规格中所有CoE 模式和各项EtherCAT 命令模式ASDA-A2-EASDA-B3-EASDA-A3-E●CODESYS 原厂认证●通过ETG (EtherCAT Technology Group)兼容性测试认证 ●支持绝对型和增量型编码器伺服电机 ●支持高速位置抓取功能●ASDA-A3-E 和ASDA-A2-E 内置符合SIL2 (IEC EN 61508 & IEC 62016) / Cat. 3 PL=d (ISO 13894-1)标准的安全扭矩停止功能 (STO, Safe Torque Off)●高阶交流伺服驱动器●同步周期短,适用于多轴高速同步控制 ●支持绝对型和增量型ECMA 系列电机●电机功率范围: 200 V 100 W ~ 3 kW 、400 V 400 W ~ 7.5 kW●标准型交流伺服驱动器●3.1 kHz 速度响应频宽,缩短40%整定时间 ●高速轴间资料交换,提供简易龙门控制功能 ●兼容 A2 / B2 / A 3 系列电机,替换方便●电机功率范围: 200 V 100 W ~ 3 kW●高效能运动控制型交流伺服系统 ●3.1 kHz 速度响应频宽,提升设备产能●全新的挠性结构补偿和低频抑制功能,确保机台稳定度和缩短整定时间●薄型化设计,节省电器柜安装空间●电机功率范围: 200 V50 W ~ 15 kW台达 CODESYS 运动控制方案产品介绍精巧高效型 / 标准型矢量控制变频器MH300 / MS300体积精巧,内置安全扭矩停止功能STO 和EMC 滤波器,整合PLC ,支持多样的通讯协定和I/O 扩展模块高效能泛用型矢量控制变频器C2000 Plus精准的速度/扭矩/位置控制模式,内置PLC ,适用于有感测器/无传感器的同步与异步电机●功率范围: 115 V 0.2 kW ~ 0.75 kW 、230 V 0.2 kW ~ 15 kW 、460 V 0.4 kW ~ 22 kW●支持感应电机与永磁电机,开环/闭环控制 ●最高输出频率: 最高 2000 Hz / 1500 Hz●内置符合SIL2 (IEC EN 61508 & IEC 62016) /Cat.3 PL d (ISO 13894-1)标准的安全扭矩停止功能 STO (Safe Torque Off) ●內建PLC (5K / 2K steps)● 支持多样的通讯协定: Modbus 、CANopen 、EtherCAT 、PROFIBUS DP 、DeviceNet 、Modbus TCP 、EtherNet/IP●电源模块: 连接EtherCAT 从站模块与100 BASE-TX EtherCAT 网络 ●数字输入模块: 16点Sink/Source 数字输入模块; 1 ms 和2 ms 的反应时间●数字输出模块: 6点数字输出模块; 输出电流:sink 型模块每点0.5 A ,source 型模块每点0.25 A ●ADC 模块: 4通道16-bit A / D 输入; DAC 模块: 4通道16-bit D / A 输出 ●运动模块: 单轴脉冲输出●手轮模块: 单通道手轮输入,4 / 6轴控制●EtherCAT 耦合器RTU-ECAT :内置2个EtherCAT 通讯端口,最多可支持8个DVP 薄型I/O 模块●数字输入模块: 支持8 / 16 / 32点NPN / PNP 输入 ●数字输出模块: 支持8 / 16/ 32点NPN / PNP/继电器输出●数字I/O 模块: 8点数字输入和8点数字输出,支持不同型态的输入/输出格式 ●模拟输入模块: 4 / 6通道,支持mA / V 输入 ●模拟输出模块: 2 / 4通道,支持mA / V 输出●数字I/O 模块: 4通道数字输入和2通道数字输出模块,支持mA / V 输入/输出型式●温度模块: 2 / 4 / 6 / 8通道,支持RTD 、热电偶和NTC 输入(注:详细信息请参照DVP 系列PLC 型录)●功率范围: 230 V 0.75 kW ~ 90 kW 、460 V 0.75 kW ~ 560 kW ●高过载承受度: 150 % / 60 秒和180 % / 3 秒,适用于恒定转矩应用 ●内置PLC (10k steps) ●支持点对点位置控制●采用3C3标准PCB 涂层,可确保变频器在恶劣环境下安全可靠运行●内置Modbus ,支持通讯扩展卡: CANopen 、EtherCAT 、ROFINET 、PROFIBUS DP 、DeviceNet 、Modbus TCP 、EtherNet/IP远端I/O 模块R1-EC ( AX-864E 适用)耐用精巧的E-bus 从站模块,适用于高精度和高需求的产业应用远端I/O 模块RTU-ECAT (PLC DVP 薄型RTU 方案)适合多种应用的精巧EtherCAT 远端I/O模块方案现场装置台达 CODESYS运动控制方案产品介绍1 ms(sink/source)反应时间(sink/source) 反应时间制造设备程序控制第三方控制器AX-864EAX-308EEthernet运动控制编程软件 - Softmotion●支持单轴和多轴运动(主/从轴运动和凸轮控制) ●使用PLCopen 认证的POU库,编辑运动控制功能●图形化CAM 编辑软件整合配置、编程、编译、和调适功能; 无缝整合传统和系统性的编程方式●在SoftPLC 和控制器的runtime 模拟模式下显示应用资料 ●在监视列表中监看指定的数值●直接在对应的编辑器中读、写、和强制设定变量●单步或单周期执行程序码支持标准 IEC 61131-3 编程●结构化文本 (ST)●梯形图 (LD)工作与除错●功能块 (FBD)●顺序功能图 (SFC)产品信息电源输入接口DC 24 V (±15 %)SSI编码器输入接口SD 卡槽HDMI输出接口Gigabit LAN 接口(Modbus TCP / OPC UA)USB EtherCAT接口连接现场装置电源输入接口DC 24 V (±15 %)8组数字输入 / 8组数字输出OA / OB / OZ signalINC 编码器输入接口ABS SSI编码器输入接口外观说明外观说明137.4166.8141164153.2R2.5X2R1.4X2554.2PC-Based 运动控制器AX-864EPLC-Based 运动控制器AX-308E产品尺寸单位: mm产品尺寸单位: mm16组数字输入8组数字输出MicroSD 卡槽RS232 / 485接口EtherCAT接口增量型编码器输入接口 (×2)Ethernet接口连接现场装置硬件规格2021型号说明AX-864E P0MB1T产品类型AX - 3 系列AX - 8 系列I/O: (晶体管) T: NPN可控制轴数。
台达plc速度前瞻
台达plc速度前瞻
(原创版)
目录
1.台达 PLC 概述
2.台达 PLC 的速度控制功能
3.台达 PLC 的速度控制技术优势
4.台达 PLC 在工业自动化领域的应用
5.台达 PLC 未来发展前景
正文
一、台达 PLC 概述
台达 PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的智能控制设备。
它可以通过编程实现对各种工业过程的自动控制,从而提高生产效率和降低生产成本。
台达 PLC 以其稳定性、可靠性和灵活性而受到用户的青睐。
二、台达 PLC 的速度控制功能
台达 PLC 具有强大的速度控制功能,可以精确地控制马达、伺服等设备的运行速度。
通过编写相应的控制程序,用户可以根据实际生产需要对设备的运行速度进行调节,以达到最佳的生产效果。
三、台达 PLC 的速度控制技术优势
1.高精度:台达 PLC 能够实现高速、高精度的速度控制,满足各种复杂工艺的要求。
2.灵活性:用户可以根据需要随时调整设备运行速度,提高生产效率和产品质量。
3.稳定性:台达 PLC 采用闭环控制技术,能够实时监测和调整设备
运行状态,保证生产过程的稳定运行。
四、台达 PLC 在工业自动化领域的应用
台达 PLC 广泛应用于各种工业自动化领域,如生产线自动化、机器人控制、设备监控等。
通过运用台达 PLC,可以实现生产过程的自动化、智能化,提高生产效率和降低生产成本。
五、台达 PLC 未来发展前景
随着工业 4.0、智能制造等技术的不断发展,对工业自动化设备的要求越来越高。
台达 PLC 作为工业自动化领域的重要设备,其未来发展前景十分广阔。
台达PLC详解,附PLC功能简介~
台达PLC详解,附PLC功能简介~一、可编程控制器的应用1、开关量逻辑控制:电动机启动与停止2、运动控制:对步进电动机或伺服电动机的单轴或多轴系统实现位置控制3、过程控制:对温度、压力、流量等连续变化的模拟量进行闭环控制4、数据处理:数据采集-运算-传送5、机械加工机床的数字控制:数控系统6、机器人控制:7、通信联网: PLC-计算机,PLC-PLC,PLC-人机界面二、可编程控制器的分类与特点1 、按结构形式分类(1) 整体式:将电源、I/O点、CPU、储存器等做成1个整体(2) 模块式:将电源、I/O点、CPU、储存器等做成多个模块2、按I/O点数及内存容量分类(1) 、超小型机:I/O点数在64以内,内存容量在256-1k字节(2)、小型机:I/O点数在64-256,内存容量在l-3.6K字节(3) 、中型机:I/O点数在256-2048,内存容量在3.6-13K字节(4) 、大型机:I/O点数在2048以上,内存容量在13K字节以上3、按功能分类(1) 低档机:基本功能,逻辑运算、定时、计数等(2) 中档机:较强的数据处理、子程序及远程I/O等功能(3) 高档机:较强的模拟调节、智能控制、过程控制等功能三、可编程控制器的特点1、编程简单并具有很好的柔性2、功能完善、实用性强3、可靠性高、抗干扰能力强4、体积小、重量轻、功耗低5、机电一体化四、PLC的基本组成1、中央处理器CPU模块(Central Processing Unit)2、存储器1)、系统程序存储区2)、用户程序存储区3、输入/输出模块4、电源模块5 、编程器和编程软件6、PLC的工作原理(1)输入采样阶段(2)用户程序执行阶段(3)输出刷新阶段7、关于梯形图的格式,一般有如下一些要求;每个梯形图网络由多个梯级组成,每个输出元素可构成一个梯级,每个梯级可由多个支路组成.通常每个支路可容纳11个编程元素。
最右边的元素必须是输出元素。
运动伺服PLC的使用

运动伺服PLC的使用任务一PLC控制伺服电机知识目标通过熟悉PLC控制伺服电机的一般规律,了解使用运动型PLC的基础知识,能够掌握基本脉冲当量的计算方法。
技能目标通过实践操作和训练理解,掌握PLC的硬件连接和软件调试的基本操作。
知识链接下面以台达的运动型PLC的DVP-PM为例,说明运动型PLC的一般使用方法。
其他类似的运动型PLC在原理上相同,使用方法上略有区别。
一、DVP-20PM运动型PLC如图所示为DVP-20PM型PLC,可以同时带动3个伺服电机,使用G代码进行编程,拥有强大的计算能力,很多情况下可取代数控系统作为准确运动平台定位的运动控制器。
在伺服电机的接线中,最为重要的是FP0+、FP0-、FP1+、FP1-和RP0+、RP0-、RP1+、RP1-端口,这几个脉冲实际上是和伺服电机驱动器中的接受端口相连,即PLC发射多少脉冲,伺服电机就接受多少脉冲,相应地,伺服电机就按照脉冲量和一圈脉冲数的比例转动多少角度,对于步进电动机而言亦是如此。
1.PLC的输入和输出和通常的PLC相同,20PM的输入继电器(或称输入端) 的编号采用八进制编码,最大点数可达256 点,范围如下:X0~X7,X10~X17,……,X370~X377。
输出继电器(或称输出端) 的编号亦采用八进制编码,最大点数可达256 点,范围如下:Y0~Y7,Y10~Y17,……,Y370~Y377。
辅助继电器M 与输出继电器Y 都有输出线圈,而且在程序当中的使用次数无限制,可利用辅助继电器M 来组合控制回路,但无法直接驱动外部负载。
依其性质可区分为下列三种。
(1)一般用辅助继电器。
一般用辅助继电器于DVP-PM 运转时若遇到停电,其状态将全部被复归为Off,再送电时其状态仍为Off。
(2)停电保持用辅助继电器。
若停电保持用辅助继电器在DVP-PM 运转时遇到停电,其状态将全部被保持,再送电时其状态为停电前状态。
(3)特殊用辅助继电器。
台达plc的原理与应用
台达PLC的原理与应用1. 什么是台达PLC台达PLC(Programmable Logic Controller,可编程逻辑控制器)是一种常用于工业自动化控制系统的电子设备,广泛应用于各类生产线、工程设备以及机械控制系统中。
其功能主要是根据预先编写好的程序来实现对生产过程的自动控制和监控。
2. 台达PLC的工作原理台达PLC的工作原理可以简单概括为以下几个步骤:•输入信号采集:PLC通过各类传感器、接触器等设备,对外部的输入信号进行采集,例如检测开关状态、测量温度、监测压力等。
•数据处理:采集到的输入信号会经过PLC内部的数字电路进行逻辑运算和算术运算,以及各种数据处理操作,例如计数、计时、加减乘除等。
•运行程序:PLC通过编写好的程序来实现对生产线或设备的控制。
这些程序一般使用类似于Ladder Diagram(梯形图)的编程语言来描述,其逻辑类似于传统电气控制线路图。
•输出控制:根据程序的逻辑判断和运算结果,PLC将指令转换成相应的输出信号,通过继电器、驱动器等装置,控制各类执行器设备的状态,如控制电机启停、开关阀门等。
•监控反馈:PLC不仅可以控制输出设备,还可以将反馈信号发送到监视器、计算机等设备上,实时监控生产过程,并根据需要进行报警、记录、统计等操作。
3. 台达PLC的应用领域台达PLC在工业自动化控制系统中的应用非常广泛,以下列举了一些常见的应用领域:•生产线控制:台达PLC可以对各类生产线进行自动控制和监控,例如流水线生产、装配线控制等。
通过PLC的程序编写和逻辑判断,实现对生产过程中的各个环节进行精确控制。
•机械设备控制:许多机械设备需要对运行过程进行自动控制,例如机床、印刷设备、包装机等。
台达PLC可以根据设定的程序和逻辑,实现对机械设备的自动化操作和控制。
•制造过程控制:在制造过程中,控制温度、压力、流量等参数非常重要。
台达PLC可以通过传感器采集到的数据,实现对制造过程的精确控制和调节,提高生产效率和产品质量。
台达PLC各系列的功能说明
台达PLC各系列的功能说明台达PLC(Programmable Logic Controller,可编程逻辑控制器)是一种用于自动化控制系统中的数字运算和逻辑运算的电子设备。
它具有可编程、灵活、可靠、稳定等特点,被广泛应用于工业控制领域。
台达PLC提供了多个系列,每个系列具有不同的功能和应用范围。
以下是对台达PLC各系列的功能进行详细说明。
1.三菱FX系列三菱FX系列是台达PLC的入门级产品,具有成本低、可编程灵活、性能稳定的特点。
该系列适用于小型自动化系统,如机器人控制、物流系统、小型机床等。
FX系列提供了多个不同型号,包括FX1N、FX2N、FX3U 等,每个型号都具有不同的输入/输出点数和通信接口,以满足不同应用的需求。
2.台达DVP系列台达DVP系列是台达PLC的中高级产品,具有更强的计算能力、更多的输入/输出点数以及更丰富的通信接口。
该系列适用于中小型工业自动化系统,如流水线控制、工艺控制、汽车生产线等。
DVP系列提供了多个不同型号,包括DVP14SS、DVP28SV、DVP60ES等,每个型号都具有不同的功能和应用范围。
3.台达AS系列台达AS系列是台达PLC的高级产品,具有更高的计算能力、更多的输入/输出点数、更快的数据传输速度以及更先进的通信接口。
该系列适用于大型复杂自动化系统,如工业控制、电力系统、交通控制等。
AS系列提供了多个不同型号,包括AS22AS、AS300系列等,每个型号都具有不同的功能和应用范围。
4.台达SS2系列台达SS2系列是台达PLC的专用产品,专门用于解决高速运动控制和精密定位的应用。
该系列具有更快的运算速度、更高的运动控制精度和更多的运动控制功能。
SS2系列可广泛应用于机器人控制、自动化设备、舞台控制等领域。
5.台达AH系列台达AH系列是台达PLC的专用产品,专门用于解决高性能控制和高可靠性的应用。
该系列具有更高的计算能力、更高的数据处理速度和更稳定的系统性能。
台达全系列PLC说明书及应用手册
台达全系列PLC说明书及应用手册PLC(可编程逻辑控制器)是工业自动化领域中广泛应用的控制设备,台达(Delta)作为知名的自动化解决方案提供商,提供了全系列PLC产品,并附带详细的说明书及应用手册。
本文将介绍台达全系列PLC的特点和应用手册的使用方法。
一、台达全系列PLC特点台达PLC系列包括以下几个型号:DVP-ES2系列、DVP-EX2系列、DVP-SS2系列、DVP-SX2系列、DVP-SA2系列、DVP-SX系列和DVP-SV系列。
每个型号都有其独特的特点和适用范围。
1. DVP-ES2系列DVP-ES2系列是一款功能全面的PLC,具有高性价比和可靠性。
它支持多达256个I/O点,适用于各种规模的自动化控制系统。
2. DVP-EX2系列DVP-EX2系列是一款高性能的PLC,具备快速的数据处理速度和强大的通信功能。
它适用于对响应速度要求较高的系统,如物流、半导体制造等行业。
3. DVP-SS2系列DVP-SS2系列是一款紧凑型PLC,适用于狭小空间和有限I/O需求的场景。
它可通过扩展模块灵活扩展I/O点数,满足特定应用的需求。
4. DVP-SX2系列DVP-SX2系列是一款具有开放式架构的PLC,支持多种编程语言和高级功能模块。
它适用于需要自定义控制算法和扩展功能的应用。
5. DVP-SA2系列DVP-SA2系列是一款高性能和高可靠性的PLC,具备强大的处理能力和丰富的通信接口。
它广泛应用于要求高稳定性和可扩展性的自动化系统。
6. DVP-SX系列DVP-SX系列是一款紧凑型PLC,适用于小型自动化系统和要求节能的应用。
它具备低功耗和高度集成的特点,可以有效降低系统运行成本。
7. DVP-SV系列DVP-SV系列是一款高速、高精度的PLC,适用于要求严格的运动控制应用。
它可实现复杂的运动控制算法和多轴同步操作,满足高端系统的需求。
二、应用手册使用方法台达全系列PLC的应用手册提供了全面的技术资料和操作指南,方便用户了解和操作PLC。
台达PLC的原理与应用(2)
台达PLC原理与应用符号操作数功能CMP比较指令s1s2Ds1指令说明比较参数s2比较参数n比较结果M0CMP K10D10Y0Y0: D10<K10时,Y0=ON;Y1: D10=K10时,Y1=ON;Y2: D10>D10时,Y2=ON符号操作数功能ZCP区间比较指令s1s2Ds1指令说明区间比较的下限值s2区间比较的上限值S 比较值SD比较结果X0ZCPK10K100D0Y0Y0: D0<K10时,Y0=ON;Y1: K0<=D10<=K100时,Y1=ON;Y2: D0>K100时,Y2=ON水塔水位控制当前水位信号K0~K40000~10VDC控制要求:z当水塔剩余水量少于1/4时,打开给水阀开关,进行给水动作;z当水塔水位正常时,正常水位指示灯点亮;z当水塔水位超过上限时,警报指示灯点亮给水阀关闭。
PLC元件元件说明D0水位高度测量值Y0给水阀开关Y1正常水位指示灯Y2水位上限警报灯应用指令-FMOV指令符号操作数功能FMOV多点传送指令SDS 指令说明数据的来源D 目标装置n数据长度nX0FMOVK10D10K5K10K10D10D11D12D13D14K10K10K10K10n=5S D单笔数据多点传送使用PLC控制多台变频器时,有时需要多台变频器运行于统一的频率。
如左图所示,只需要旋转旋钮,即可切换4台变频器的频率切换。
假设4台变频器的频率寄存器分别对应D10,D11,D12,D13。
PLC元件元件说明PLC元件元件说明X1选择0Hz频率X4选择50Hz频率X2选择30Hz频率D10~D134台变频器的驱动频率X3选择40Hz频率应用指令-BMOV指令符号操作数功能BMOV全部传送指令SDS 指令说明数据的来源D 目标装置n数据长度nX0BMOVD0D10K5D10D11D12D13D14n=5D0D1D2D3D4S D应用指令-BMOV指令范例多笔历史数据备份启动停止控制要求:z对待测设备的数据进行记录,将测试数据依次存入D0~D99中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
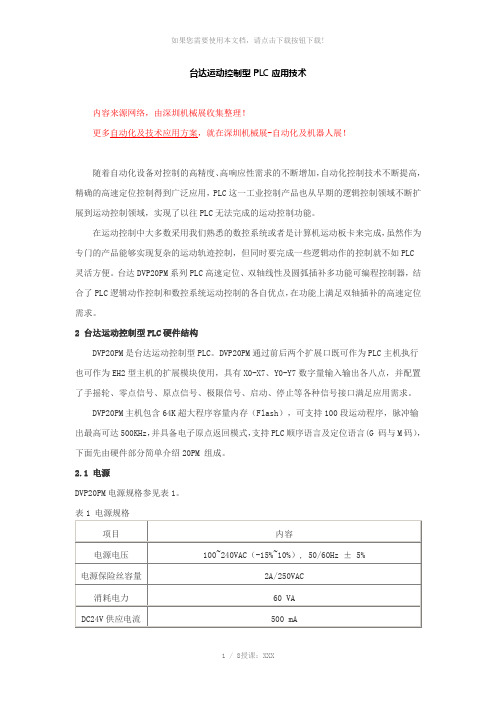
台达运动控制型PLC应用技术摘要:本文简述台达DVP20PM运动控制型PLC的硬件及软件结构,并介绍在应用中的方法及特点。
关键词:PLC运动控制逻辑控制数控系统 CAM插补运算1 引言随着自动化设备对控制的高精度、高响应性需求的不断增加,自动化控制技术不断提高,精确的高速定位控制得到广泛应用,PLC这一工业控制产品也从早期的逻辑控制领域不断扩展到运动控制领域,实现了以往PLC无法完成的运动控制功能。
在运动控制中大多数采用我们熟悉的数控系统或者是计算机运动板卡来完成,虽然作为专门的产品能够实现复杂的运动轨迹控制,但同时要完成一些逻辑动作的控制就不如PLC灵活方便。
台达DVP20PM系列PLC高速定位、双轴线性及圆弧插补多功能可编程控制器,结合了PLC逻辑动作控制和数控系统运动控制的各自优点,在功能上满足双轴插补的高速定位需求。
2 台达运动控制型PLC硬件结构DVP20PM是台达运动控制型PLC。
DVP20PM通过前后两个扩展口既可作为PLC 主机执行也可作为EH2型主机的扩展模块使用,具有X0-X7、Y0-Y7数字量输入输出各八点,并配置了手摇轮、零点信号、原点信号、极限信号、启动、停止等各种信号接口满足应用需求。
DVP20PM主机包含64K超大程序容量内存(Flash),可支持100段运动程序,脉冲输出最高可达500KHz,并具备电子原点返回模式,支持PLC顺序语言及定位语言(G码与M码),下面先由硬件部分简单介绍20PM组成。
2.1电源DVP20PM电源规格参见表1。
2.2I/O点规格参见图1,DVP20PM提供的数字量输入输出点规格与台达通用PLC规格基本相同,输入点支持SINK(漏极)和SOURCE(源极)两种方式,输出点也有继电器输出和晶体管输出可选。
图1点击此处查看全部新闻图片需要提到的是其在运动控制中的特殊输入输出点,简述如下:START0、START1:启动输入STOP0、STOP1:停止输入LSP0/LSN0、LSP1/LSN1:右极限输入/左极限输入A0+、A0-、A1+、A1-:手摇轮A相脉波输入+,-(差动信号输入)B0+、B0-、B1+、B1-:手摇轮B相脉波输入+,-(差动信号输入)PG0+、PG0-、PG1+、PG1-:零点讯号输入+,-(差动信号输入)DOG0、DOG1:原点回归的近点信号输入或多段运动的启动信号CLR0+、CLR0-、CLR1+、CLR1-:清除信号(Servo驱动器内部偏差计数器清除信号)FP0+、FP0-、FP1+、FP1-:脉冲输出端口RP0+、RP0-、RP1+、RP1-:脉冲输出端口(注:0表示第一轴,1表示第二轴,如START0表示启动第一轴,START1表示启动第二轴,其他信号依次类推)从端子分布可以看到,除了常用的极限和启动停止信号外,配置了过零脉冲PG和手摇轮功能输入端,手摇轮是机床应用中常用而必备功能,而利用过零信号在精确控制场合往往会用到,当然更不用说定位控制中都会用到的DOG原点信号。
2.3配线规格一般I/O点配线就不再赘言了,可以关注一下PLC比较少用到的差分输入输出方式,在信号中有一部分是这样的,一定要注意否则将不能正确完成,参见图2、图3。
图2差分输入配线示意图点击此处查看全部新闻图片图3差分输出配线示意图点击此处查看全部新闻图片3 台达运动控制型PLC软件结构3.1DVP20PM程序结构由于20PM主机结合了PLC顺序逻辑控制及双轴插补定位控制的功能,因此在程序架构上主要分为O100主程序、Ox运动子程序及Pn子程序等三大类,结合了基本指令、应用指令、运动指令及GCode指令,使程序设计更多元化,结构更清晰;程序采用PMSOFT软件进行编辑,参见图4。
图4程序设计界面点击此处查看全部新闻图片(1)主程序。
主程序以O100作为起始标记,M102作为结束标记,是PLC 顺序控制程序,主要为控制主机动作执行,在O100主程序区域中,可以使用基本指令及应用指令,或在程序中启动Ox0~Ox99运动子程序及调用Pn子程序。
主要提供主控制程序的建立,以及运动子程序的设定及启动控制。
(3)运动子程序。
Ox0~Ox99运动子程序为运动控制程序,主要为控制20PM 系列主机进行X-Y轴双轴运动之子程序,于Ox0~Ox99运动子程序区段中,有支持基本指令、应用指令、运动指令及G码指令,并在程序中可规划呼叫Pn指针子程序,通过PLC提供的内部特D特M进行子程序的控制。
主要提供运动子程序的建立,以及运动子程序的运动控制,在架构上可算是20PM的运动指令及G码指令规划区域。
(4)子程序。
这里所说的子程序是指以Pn开头的一般用子程序,主要是被O100主程序及Ox运动子程序调用的子程序。
如在O100主程序调用Pn指针,则Pn指针子程序支持基本指令及应用指令;若在Ox0~Ox99运动子程序中调用Pn 指针时,则Pn指针子程序区段可支持基本指令、应用指令、运动指令及G码指令。
3.2PMSOFT软件介绍与台达PLC的WPLSoft软件相似,DVP20PM的编程软件PMSOFT按照IEC61131标准设计,具有梯形图和语句表两种编程方式,且具有G码汇入、错误提示、区段注释、装置注释、标尺、完善的监控窗口、运动指令追踪等便利工具提供给用户,特别值得一提的是该软件具有运动轨迹仿真功能,当您编辑好程序后可利用此功能对加工轨迹进行模拟演示,参见图5。
为方便切换阶梯窗口,只要点选系统信息列中的树枝状对应的程序编号,自动切换对应的程序编辑窗口,在PMSoft编辑环境中同时只能有一个阶梯图窗口,这是为了在庞大复杂程序中找寻程序方便,同时将主程序、运动子程序、一般子程序这三种程序模块化处理,O100主程序只有一个编辑窗口,Oxn运动程序有100个编辑窗口,Pm子程序有256个编辑窗口,总共有357个窗口,每个窗口未编辑都有10network。
程序编辑由网络区段组成,每个网络区段是由输入与输出编辑区域所组成,在编辑过程中,自动产生逻辑结构正确的阶梯图,使用者无须再做额外补线的动作,网络区段编辑并具有错误提示功能。
图5梯形图编程界面点击此处查看全部新闻图片4 运动控制编程4.1相关概念在谈到DVP20PM产品的应用之前,我们对以下概念进行一个简要介绍。
(1)插补。
插补是在组成轨迹的直线段或曲线段的起点和终点之间,按一定的算法进行数据点的密化工作,以确定一些中间点。
从而为轨迹控制的每一步提供逼近目标。
逐点比较法是以四个象限区域判别为特征,每走一步都要将加工点的瞬时坐标与相应给定的图形上的点相比较,判别一下偏差,然后决定下一步的走向。
如果加工点走到图形外面去了,那么下一步就要向图形里面走;如果加工点已在图形里面,则下一步就要向图形外面走,以缩小偏差,这样就能得到一个接近给定图形的轨迹,其最大偏差不超过一个脉冲当量(一个进给脉冲驱动下工作台所走过的距离)。
(2)直线插补。
这个概念一般是用在计算机图形显示,或者数控加工的近似走刀等情况下,以数控加工为例子:一个零件的轮廓往往是多种多样的,有直线,有圆弧,也有可能是任意曲线,样条线等。
数控机床的刀具往往是不能以曲线的实际轮廓去走刀的,而是近似地以若干条很小的直线去走刀,走刀的方向一般是x和y方向。
插补方式有:直线插补,圆弧插补,抛物线插补,样条线插补等等。
所谓直线插补就是只能用于实际轮廓是直线的插补方式(如果不是直线,也可以用逼近的方式把曲线用一段段线段去逼近,从而每一段线段就可以用直线插补了).首先假设在实际轮廓起始点处沿x方向走一小段(一个脉冲当量),发现终点在实际轮廓的下方,则下一条线段沿y方向走一小段,此时如果线段终点还在实际轮廓下方,则继续沿y方向走一小段,直到在实际轮廓上方以后,再向x方向走一小段,依次循环类推.直到到达轮廓终点为止.这样,实际轮廓就由一段段的折线拼接而成,虽然是折线,但是如果我们每一段走刀线段都非常小(在精度允许范围内),那么此段折线和实际轮廓还是可以近似地看成相同的曲线的--这即是直线插补。
(3)联动与插补。
一个点的空间位置需要三个坐标,决定空间位置需要六个坐标。
一个运动控制系统可以控制的坐标的个数称做该运动控制系统的轴数。
而可以同时控制运动的坐标的个数称做该运动控制系统可联动的轴数。
联动各轴的运动轨迹具有一定的函数关系,例如直线,园弧,抛物线,正弦曲线。
直接计算得出运动轨迹的坐标值往往要用到乘除法,高次方,无理函数,超越函数,会占用很多的CPU时间。
为了实时快速控制运动轨迹,往往预先对运动轨迹进行直线和圆弧拟合,拟合后的运动轨迹仅由直线段和圆弧段所组成,而计算运动轨迹时,每一点的运动轨迹跟据前一个坐标点的数据通过插补运算得到,这样就把计算简化为增量减量移位和加减法。
实现多轴联动的直线插补并不困难,圆弧插补一般为两轴联动。
插补运算可以有多种算法,例如"DDA算法","逐点比较法","正负法","最小偏差法(Bresenham算法)"等,其中最小偏差法具有最小的偏差和较快的运行速度。
DVP20PM运动控制型PLC可实现2轴联动,支持直线和圆弧插补,以及相应的第三轴处理。
(4)数控软件。
DVP20DPM支持复杂的运动轨迹控制,那是如何实现的呢?简单的说,将复杂轨迹通过AUTOCAD等软件生成图形,再经过CAM软件转换为G 代码,而PMSOFT可以直接导入文本格式的G代码,这样就可以完成运动程序下载到20PM中执行。
那么怎样完成图形到G代码的转换呢,这就需要CAM软件了,以下简单介绍一些常用的CAM软件:目前CAD/CAM行业中普遍使用的是MASTERCAM、CIMATRON、PRO-E、UG、CATIA...•MASTERCAM是最常用的一种软件,大多数数控操作员都使用MASTERCAM,它集画图和编程于一身,绘制线架构最快,缩放功能最好。
•CIMATRON是迟一些进入中国的软件,在刀路轨迹上的功能优越于MASTERCAM,现已被广泛地应用。
•Pro/E是美国PTC开发的软件,现已成为全世界最普及的三维CAD/CAM系统。
集多种功能于一体,用于模具设计、产品画图、广告设计、图像处理、灯饰造型设计,是最好的画图软件,一般来说用PRO-E画图,用MASTERCAM或CIMATRON 加工。
当然还有其他同类软件也同样可以使用,通过这些软件将我们想要加工的轨迹曲线数据转换为PLC或数控系统可以识别执行的代码,从而控制我们的设备运动。
4.2运动控制特点(1)DVP20PM特色。
多段速执行及中断定位,利用此项功能实现运动的平滑性及准确定位。
64K步程序容量,100段运动程序,满足不同加工需求;在20PM 中最大可设置100种运动轨迹,同时利用64K的程序容量,预先将需要执行的各种不同运行曲线的G码存储在PLC中,当需要加工某种规格时,可以采用文本显示器、触摸屏等来调用。