基于单片机的老人监护系统
107、基于51单片机老人防跌倒体温检测GSM短信设计
第一章绪论
1.1课题背景及其意义
21世纪被称为“银发世纪”,人口老龄化是当今社会面临的重大挑战之一。
通常认为65岁以上的比率超过总人口的7%,就称为“老龄化社会”,而超过14%就称为“老龄社会”。目前,世界上所有发达国家都已经进入老龄社会,许多发展中国家正在或即将进入老龄社会。截至2008年底,我国65岁以上人口10956万人,占全国总人口的8.3%。中国作为世界上人口最多的发展中国家,人口老龄化的趋势加速发展,预计到2030年中国将进入深度老龄化,并超过日本成为全国人口老龄化程度最高的国家。
方案二
采用ST公司的STC89C52单片机作为主控制器,STC89S52是一种低功耗、高性能CMOS8位微控制器,具有8K在系统可编程Flash存储器。该单片机功耗低、接口丰富,成本低廉,完全能满足本设计要求。
方案三
采用单片机芯片控制MSP430单片机是美国德州仪器(TI)推出的一种16位超低功耗的混合信号处理器(Mixed Signal Processor),主要是针对实际应用需求,把许多模拟电路、数字电路和微处理器集成在一个芯片上,以提供“单片”混合信号处理的解决方案。MSP430F149是一个16位的、具有精简指令集的、超低功耗的混合型单片机,具有可靠性高、功耗低、扩展灵活、体积小、价格低和使用方便等优点,广泛应用于仪器仪表、专用设备智能化管理及过程控制等领域,有效地提高了控制质量与经济效益,已成为众多单片机系列中一颗耀眼的新星。然而其成本太高,故舍弃。
故选择方案二。
2.2.4无线遥控模块的选择
方案一
采用红外遥控模块系统进行无线控制,红外载波频率:38KHz,其理论遥控范围为8-10米,遥控范围内,电路简单,成本极低。
基于STM32的24h老年人守护系统设计

基于 STM32的 24h老年人守护系统设计2.南京弘毅电气自动化有限公司,江苏南京,210000)摘要:设计了一种可以24小时监控人体健康状态的守护系统,能对人体包括体温、心率进行实时监测,还能对异常情况采取相应的措施以防止出现不良后果,同时系统将定位信息发送出去。
该守护系统可以应用在空巢老人、养老院以及医院需要实时监控病人身体状态等地方,还能实现无线传输数据到总控制室进行处理分析。
关键词:可穿戴设备;医疗服务设计;STM32基金项目:滁州学院大学生创新创业训练计划资助项目(S202110377132,S202110377131);安徽省教学研究项目(2020jyxm1346,2020jyxm1327),安徽省校企合作实践教育基地(2020sjjd086);滁州学院重点教研项目(2020jyz033,2020jyz041)。
20世纪90年代以来,中国的老龄化进程加快[1]。
65岁及以上老年人口从1990年的6299万增加到2000年的8811万,占总人口的比例由5.57%上升为6.96%,目前中国人口已经进入老年型。
随着20世纪中期出生高峰的人口陆续进入老年,可以预见,21世纪前期将是中国人口老龄化发展最快的时期。
在生活中常常有一些老人子女无法照料,独自在家就有很多风险,老人生病、摔倒等无人知晓,可能会因为无法及时得到救援而威胁到老人生命安全[2]。
医院里长期生病的病人需要经常采集不同时间段的体温、心率等数据,尤其是晚上需要采集常常会影响病人睡眠等,导致极不方便。
所以采取的技术措施是通过互联网将老年人、监护人或者病人、医生有机联系在一起,通过技术手段让老年人、病人的活动得到一定的监测,将老年人身体基本状况反映给监护人、医生,从而对老年人起到监测和保护作用[3]。
该系统包括的模块有心率测量、体温测量、定位和无线传输等模块。
1系统主要模块设计1.1定位模块设计按下定位按键,可以接收到位置信息的经纬度,精度550m。
试析STM32单片机的中老年人跌倒监测装置
试析STM32单片机的中老年人跌倒监测装置众所周知,我国社会正逐渐步入老龄化,老年人口抚养比不断提高,老年人保健的重要性日益凸显,同时许多子女选择异地工作和生活,导致了大量老年人空巢。
于是,老年人的安全监护成了一个突出的社会性问题。
随着年纪增长,老年人身体机能下降并伴随多种老年性疾病,使之在日常生活中更容易跌倒,所以老年人特别是独居老人发生跌倒能否得到及时救助是至关重要的,而解决此问题的核心技术便是跌倒检测技术。
又因老年性疾病多与血压等生理信号有关,故对老年人的生理信号检测达到对跌倒检测的辅助判定以及相关生理健康监测亦为重要。
基于对中老人跌倒判定、生理健康监测的目的,本文介绍一种基于STM32的老人跌倒检测装置。
该装置能较为精确地对目标群体实施跌倒检测与健康监测,实时将用户的心率,体温等通过无线方式推送至微信平台以及GSM平台,便于尽快进行医疗救援呼叫。
此装置设计成本较低,实现技术较为容易,易于实现对目标群体的跌倒检测及健康监测。
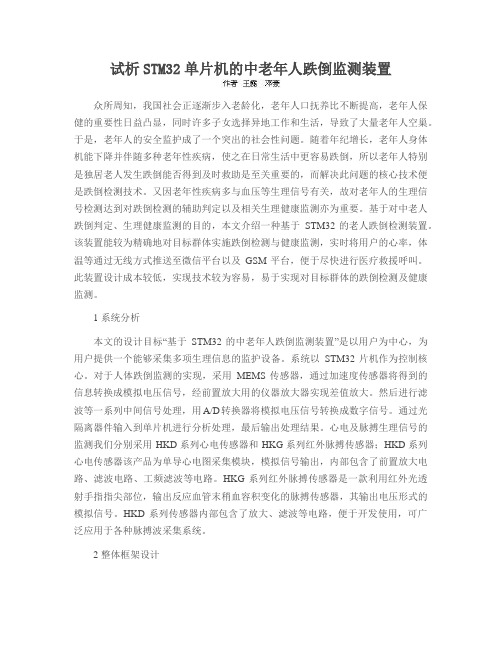
1 系统分析本文的设计目标“基于STM32的中老年人跌倒监测装置”是以用户为中心,为用户提供一个能够采集多项生理信息的监护设备。
系统以STM32片机作为控制核心。
对于人体跌倒监测的实现,采用MEMS传感器,通过加速度传感器将得到的信息转换成模拟电压信号,经前置放大用的仪器放大器实现差值放大。
然后进行滤波等一系列中间信号处理,用A/D转换器将模拟电压信号转换成数字信号。
通过光隔离器件输入到单片机进行分析处理,最后输出处理结果。
心电及脉搏生理信号的监测我们分别采用HKD系列心电传感器和HKG系列红外脉搏传感器;HKD系列心电传感器该产品为单导心电图采集模块,模拟信号输出,内部包含了前置放大电路、滤波电路、工频滤波等电路。
HKG系列红外脉搏传感器是一款利用红外光透射手指指尖部位,输出反应血管末稍血容积变化的脉搏传感器,其输出电压形式的模拟信号。
HKD系列传感器内部包含了放大、滤波等电路,便于开发使用,可广泛应用于各种脉搏波采集系统。
一种独居老人家庭监护系统的设计

第11期2020年6月No.11June,202021世纪以来,我国的人口老龄化问题日益严重。
根据国老龄委员会办公室的数据显示,在未来一段时间里,中国每年都会增加1 000万左右的老年人,预计至21世纪中叶,老年人口比例将占全国人口的1/3左右。
1 独居老人家庭监护系统功能该独居老人家庭监护系统可以测量家庭环境参数,如温度、湿度、甲烷浓度等,还可以测量脉搏、心率、血压、体温等人体参数,并在上位机实时显示,火灾报警器、门窗报警器等的状态也可以在上位机显示出来。
如果环境数据异常(如超标),老人身体参数异常(如出现心脏病、高血压、低血糖、发高烧等症状),或者报警器有动作,则单片机通过SIM800模块给用户手机发手机短信,及时通知异常情况,以便用户及时处理[1]。
树莓派可以通过连接WiFi 无线网络或者通过TCP/IP 协议有线传输,建立摄像头与树莓派间的通信,连接于同一网段(路由器)的计算机就可以登录网站或者客户端查看实时监控视频。
对于子女来说,就可以24 h 全天候地远程查看独居老人的生活状态。
系统设计流程如图1所示。
2 硬件设计2.1 传感器模块(1)温湿度传感器。
SHT30传感器是一种新型的温湿度测量传感器,成本低廉,性能可靠,额定工作电压为5 V ,采用IIC 协议采集信号,体积小,成本低,测量精度高。
SHT30温湿度传感器4线接线,封装形式多种多样[2]。
(2)甲烷浓度传感器。
是一种特定的气敏元件,当暴露在甲烷气体的环境中时,其电导率随甲烷浓度的变化而变化。
该传感器使用16位的AD 转换器,将模拟量转换为数字量,转换精度、灵敏度都较高。
(3)火焰传感器。
可以检测火源,及时发现火灾情况并报警。
当改变火焰传感器的电路阻值时,传感器对火焰的灵敏度也会发生变化。
在电路中有专门的阈值电路,当传感器检测值超过设定的阈值时,输出电路接通,输出高电平;当传感器检测值低于设定阈值时,输出电路截断,输出低电平。
基于单片机智能健康监护仪设计报告
基于单片机智能健康监护仪设计一、研究意义随着生活水平的不断提高,人们对健康保健和常规检查越来越重视。
而且社会老龄化的不断加剧,老年人健康问题也成为了深受社会关注的问题。
但是目前的医疗设施水平还远远不能满足社会需求。
因此,研究一种新的医疗设备势在必行。
智能健康监护仪就成为解决上述问题的有效途径。
本文研究的智能健康监护仪可以实现对病人血压、体温、心电、心音、脉搏等参数的实时监护,具有良好的可扩展性和灵活性。
本智能健康监护仪可对多项人体生理参数(体温、血压、脉搏、心电、心音)进行采集和分析,从中得到关于用户健康状况的信息。
同时,本系统还可通过多种接口将信息传送至PC,并可以通过3G网络将信息发送至手机等移动式设备。
本产品扩展性强、便携、易用,在个人保健等方面有较好的发展前景。
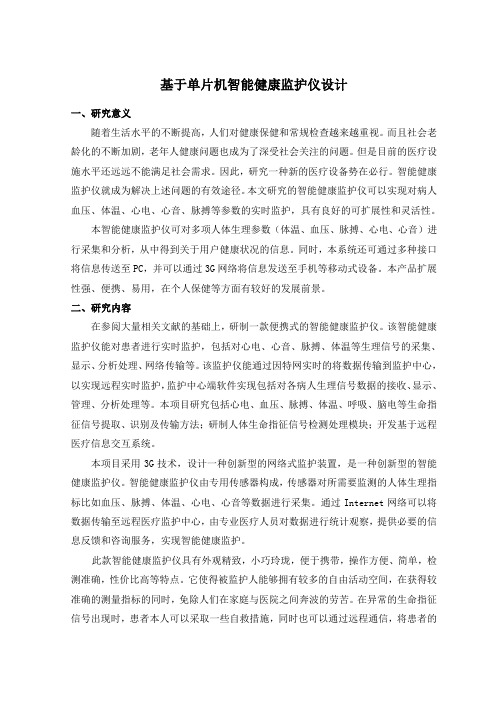
二、研究内容在参阅大量相关文献的基础上,研制一款便携式的智能健康监护仪。
该智能健康监护仪能对患者进行实时监护,包括对心电、心音、脉搏、体温等生理信号的采集、显示、分析处理、网络传输等。
该监护仪能通过因特网实时的将数据传输到监护中心,以实现远程实时监护,监护中心端软件实现包括对各病人生理信号数据的接收、显示、管理、分析处理等。
本项目研究包括心电、血压、脉搏、体温、呼吸、脑电等生命指征信号提取、识别及传输方法;研制人体生命指征信号检测处理模块;开发基于远程医疗信息交互系统。
本项目采用3G技术,设计一种创新型的网络式监护装置,是一种创新型的智能健康监护仪。
智能健康监护仪由专用传感器构成,传感器对所需要监测的人体生理指标比如血压、脉搏、体温、心电、心音等数据进行采集。
通过Internet网络可以将数据传输至远程医疗监护中心,由专业医疗人员对数据进行统计观察,提供必要的信息反馈和咨询服务,实现智能健康监护。
此款智能健康监护仪具有外观精致,小巧玲珑,便于携带,操作方便、简单,检测准确,性价比高等特点。
它使得被监护人能够拥有较多的自由活动空间,在获得较准确的测量指标的同时,免除人们在家庭与医院之间奔波的劳苦。
基于STC89C52单片机的老人智能防护报警系统设计
LED发光二极管,它一般作为指示灯和显示板,它是二极管的一种,因此也有阴极和阳极,LED方向必须接对了才有电流通过,小灯才会发光。VCC接5V电压,LED自身压降大约为2V。在电路中,电阻通常称之为“限流电阻”,它的作用是保护LED灯。只要单片机的控制引脚拉低,则LED灯亮,否则,LED灯不亮。其具体电路原理图如图4所示。
2控制系统硬件电路设计
2.1 STC89C52单片机最小系统说明:
STC89C52单片机最小系统由电源、晶振、复位电路三部分组成。拥有这三部分电路后,单片机即可正常工作。STC89C52单片机最小系统原理图如图2所示。
(1)VCC和GND为单片机的电源引脚,为单片机提供电源:
(2)STC9C52单片机复位电路由三部分组成,如图2所示分别为按键S1、电容EC1和电阻R1。具有程序自动复位手动按键复位和上电复位三种复位方式。在程序运行过程中如果程序长时间失去响应,单片机的自动复位机制如看门狗就会自动复位重启,这就是程序自动复位;当运行程序时,如果出现意外状况导致程序死机,这时候就手动按下复位键,程序就会重新运行,这就叫做手动复位;单片机在意外断电情况下可能会丢失部分数据,为了保证单片机正常运行,上电后单片机会进行一个内部初始化的过程,这个过程就是上电复位。
2.5按键电路设计
在本设计中,采用的是独立按键,它们各自与独立的输入线连接,按键作为系统的输入,起到了人机交互的枢纽作用。当S2按下后,形成一条通路,单片机的相关引脚则变成低电平。当按键松开后,线路断开,电流不能通过,相关引脚变为高电平,进而实现对系统的手动输入。其电路原理图如图5所示。
2.6蜂鸣器报警电路设计
如图6所示蜂鸣器电路,因为蜂鸣器电流相对较大,因此采用三极管驱动,外加100欧限流电阻,D4为续流二极管,它避免了断电时由于电感电流造成的反向冲击。电路中采用三极管9012来驱动,当单片机控制引脚为低电平时,蜂鸣器就会鸣叫报警,当单片机引脚为高电平时不鸣叫,因此可以通过控制单片机引脚方波输出形式控制蜂鸣器的鸣叫方式。
老人夜间智能监护系统的设计
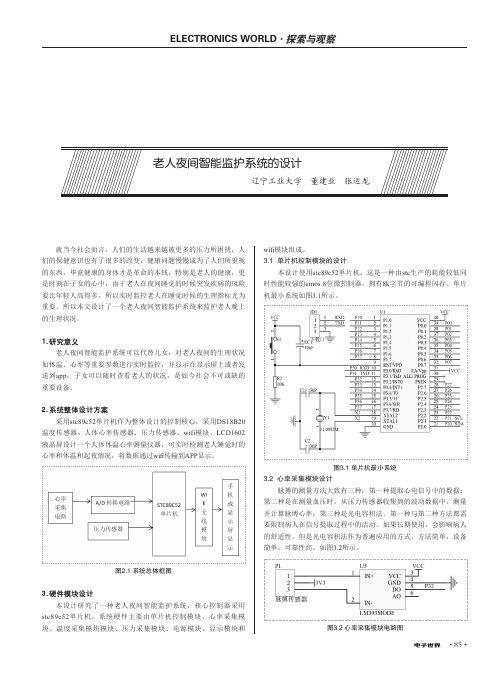
• 85•老人夜间智能监护系统的设计辽宁工业大学 董建业 张运龙就当今社会而言,人们的生活越来越被更多的压力所困扰,人们的保健意识也有了很多的改变,健康问题慢慢成为了人们所重视的东西,毕竟健康的身体才是革命的本钱,特别是老人的健康,更是时刻在子女的心中,由于老人在夜间睡觉的时候突发疾病的风险要比年轻人高得多,所以实时监控老人在睡觉时候的生理指标尤为重要。
所以本文设计了一个老人夜间智能监护系统来监护老人晚上的生理状况。
1.研究意义老人夜间智能监护系统可以代替儿女,对老人夜间的生理状况如体温,心率等重要参数进行实时监控,并显示在显示屏上或者发送到app,子女可以随时查看老人的状况,是如今社会不可或缺的重要设备。
2.系统整体设计方案采用stc89c52单片机作为整体设计的控制核心,采用DS18B20温度传感器、人体心率传感器、压力传感器、wifi模块、LCD1602液晶屏设计一个人体体温心率测量仪器,可实时检测老人睡觉时的心率和体温和起夜情况,将数据通过wifi传输到APP显示。
图2.1 系统总体框图3.硬件模块设计本设计研究了一种老人夜间智能监护系统,核心控制器采用stc89c52单片机,系统硬件主要由单片机控制模块、心率采集模块、温度采集模块模块、压力采集模块、电源模块、显示模块和wifi模块组成。
3.1 单片机控制模块的设计本设计使用stc89c52单片机,这是一种由stc生产的耗能较低同时性能较强的cmos 8位微控制器,拥有8k字节的可编程闪存。
单片机最小系统如图3.1所示。
图3.1 单片机最小系统3.2 心率采集模块设计脉搏的测量方法大致有三种:第一种提取心电信号中的数据;第二种是在测量血压时,从压力传感器收集到的波动数据中,测量并计算脉博心率;第三种是光电容积法。
第一种与第二种方法都需要限制病人在信号提取过程中的活动。
如果长期使用,会影响病人的舒适性。
但是光电容积法作为普遍应用的方式,方法简单,设备简单,可靠性高。
基于单片机的人体健康智能检测报警系统1

中国电子科技大学毕业设计(论文)基于单片机的人体健康智能检测报警系统学院名称信息与通信工程学院专业名称自动化学生学号XXXXX学生姓名学生姓名指导教师教授姓名助理指导老师老师姓名202X年X月摘要该家居系统设计是基于单片机控制的人体健康监测报警系统,由五部分构成。
它包含DS18B20单总线数字温度传感器、AT89C51单片机、HK-2000A集成化脉搏传感器、LM041L字符型显示器、PT2262/PT2272无线收发芯片。
该设计是在PROTUES软件环境下完成的,并用Keil进行仿真。
本文介绍了PROTUES单片机仿真软件,还有DS18B20单总线数字温度传感器、AT89C51单片机、和LM041L字符型显示器的结构、性能特点及其工作原理。
除此之外还有HK-2000A集成化脉搏传感器的性能参数和PT2262/PT2272无线收发芯片的介绍使用。
该设计系统可以完成家居人体健康监测报警系统对于人体体温、脉搏等参数的采集、处理和显示,并能够在这些参数超过对参数设定的正常阈值一定范围时,进行报警,提醒家长,以便第一时间救治病人。
关键词:AT89C51 ; DS18B20 ; HK-2000A ;PT2262/PT2272 ; PROTUES ;AbstractThe home system design is a human body health monitor and alarm system which control is based on MCU.It is consisting of five things. They contain a single bus digital temperature sensor DS18B20 , AT89C51 single-chip computer, HK-2000A integrated pulse sensor , LM041L character display and PT2262/PT2272 wireless transceiver chip. The design was done in PROTUES software environment, and the simulation with the Keil. This paper introduces the PROTUES single-chip computer simulation software. And the digital temperature sensor DS18B20 single busAT89C51 single-chip computer and LM041L character display structure characteristics and working principle. In addition,HK-2000A integrated pulse sensor performance parameter of the sensor and PT2262/PT2272 wireless transceiver chip is introduced. The designed system can complete home health monitoring alarm system for body temperature parameters such as pulse acquisition processing and display. In these parameters and can be more than the normal threshold of a range of parameters. For alarm to remind parents , for the first time cure patient .key words:AT89C51 ; DS18B20 ; HK-2000A ; PT2262/PT2272 ; PROTUES ;目录摘要................................................ - 2 - 引言................................................ - 5 - 第1章系统设计简介................................... - 6 - 第2章元器件的选择.................................. - 7 - 第3章系统硬件设计.................................. - 12 - 第4章系统软件设计.................................. - 17 - 第5章仿真与调试.................................... - 21 - 第6章总结.......................................... - 24 - 参考文献............................................. - 25 - 致谢.............................................. - 26 - 附录一:程序清单..................................... - 27 -引言随着社会不断发展,国民经济不断提升,人们生活水平有着翻天覆地的变化。
基于单片机的卧床患者看护仪的设计

基于单片机的卧床患者看护仪的设计发表时间:2019-11-29T14:32:07.150Z 来源:《云南电业》2019年6期作者:李家鹏张军逯中浩梁晨鹏[导读] 老龄化早已成为一个全球化的现象,而中国情况则更为严重,到2050年,届时65岁以上老人的占比将达到1/3,而该人群恰好是心血管、糖尿病等慢病的高发人群,占比接近50%,"失能化"、"空巢化"以及"少子化"等现象在养老市场也亦为突出。
长远不可扭转的趋势,则是技术进步带来的智能养老发展。
李家鹏张军逯中浩梁晨鹏(辽宁科技学院电气与信息工程学院辽宁本溪)引言老龄化早已成为一个全球化的现象,而中国情况则更为严重,到2050年,届时65岁以上老人的占比将达到1/3,而该人群恰好是心血管、糖尿病等慢病的高发人群,占比接近50%,"失能化"、"空巢化"以及"少子化"等现象在养老市场也亦为突出。
长远不可扭转的趋势,则是技术进步带来的智能养老发展。
1 系统整体结构常年卧床的患者,行动不便,在家看护时需要监测体温和脉搏(心率);对于大小便失禁或神志不清的患者需要及时更换褥垫,以保持身下干爽,降低褥疮的发生机率。
目前市面上有形式多样的体温计、脉搏测量仪,功能相对单一,使用不方便。
为了解决这一问题,本项目设计了一种基于单片机的看护仪,包括脉搏采集、体温采集、湿度采集、定时提醒、GSM通信模块等,实现对家居卧床患者的全方位帮助,系统框图如图1所示。
图1 卧床看护仪整体结构项目以单片机(AT89C52)为控制单元,将单片机的引脚分别连接到脉搏、心率采集模块(Pulsesensor)、体温采集模块(MAX30205MTA)、湿度采集模块(DHT11)、声光报警模块、液晶显示模块(LCD1602)等。
根据需要,监测哪部分时,哪部分传感器工作。
液晶显示模块显示要检测的数据。
基于单片机的老人防护监控系统
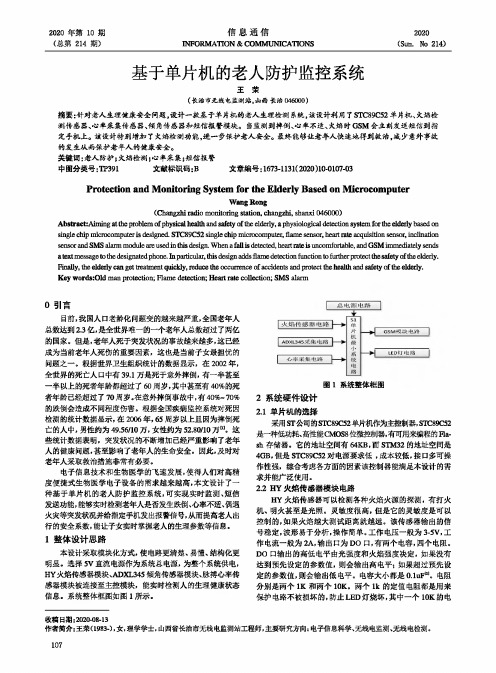
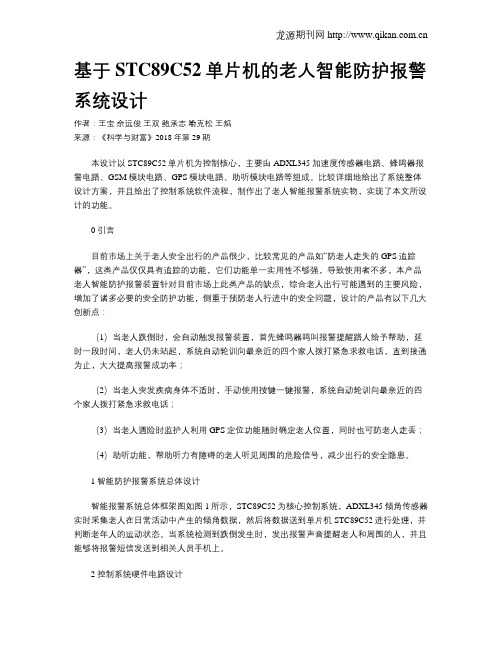
2020年第10期信息通信2020 (总第214期)INFORMATION&COMMUNICATIONS(Sum.No214)基于单片机的老人防护监控系统王荣(长治市无线电监测站,山西长治046000)摘要:针对老人生理健康安全问题,设计一款基于单片机的老人生理检测系统,该设计利用了STC89C52单片机、火焰检测传感器、心率采集传感器、倾角传感器和短信报警模块。
当监测到摔倒、心率不适、火焰时GSM会立刻发送短信到指定手机上。
谏设计特别增加了火焰检测功能,进一步保护老人安全。
最终能够让老年人快速地得到救治,减少意外事故的发生从而保护老年人的健康安全。
关键词:遞人防护;火焰检测;心率采集;短信报警中图分类号:TP391文献标识码:B文章编号:1673-1131(2020)10-0107-03Protection and Monitoring System for the Elderly Based on MicrocomputerWang Rong(Changzhi radio monitoring station,changzhi,shanxi046000)Abstract:Aiming at the pnblem of p hysical health and safety of t he elderly,a physiological detection system for lhe elderly based an single chip microcomputer is designed.STC89C52single chip microcomputer,flame sensor,heait rate acquisition sensor,inclinaticm sensor and SMS alarm module aieused in this design.When a fall is detected,heait rate is uncomfortable,and GSM immediately sendsa textmessage to the designated p hone.Inpaiticular,this design adds flame detection function t o further p rotect t he safety of t he elderly.Finally,the elderly can get treatment quickly,reduce the occunence of accidents and protect lhe health and safety of t he elderly.Key words:Old man protection;Flame detection;Heart rate collection;SMS alarm0引官目前,我国人口老龄化问题变的越来越严重,全国老年人总数达到2.3亿,是全世界唯一的一个老年人总数超过了两亿的国家。
应用于独居老人无线监护系统的设计

应⽤于独居⽼⼈⽆线监护系统的设计应⽤于独居⽼⼈⽆线监护系统的设计摘要为了防⽌独居⽼⼈在家中发⽣意外情况,保障⽼⼈的⼈⾝安全,同时保护⽼⼈的个⼈隐私,本⽂结合单⽚机串⾏全双⼯通信和⽆线⾼频收发电路与热释红外探头设计了适⽤于独居⽼⼈的⽆线监控系统。
该系统具有地址显⽰、呼叫回复和⾃动呼叫报警等功能,性能稳定可靠,实⽤性强。
本⽂详细描述了应⽤于独居⽼⼈的⽆线监护系统的设计⽅案、设计过程和特⾊。
关键词:远程监护;⽆线收发;呼叫系统;红外探头引⾔随着世界经济的发展,⼈们的思想意识不断改变,“丁克族”的不断增加,出⽣率⼩于死亡率,⼈⼝负增长,已经让世界逐渐步⼊⼈⼝⽼龄化。
我国是⼈⼝⼤国,也是⽼年⼈⼝最多的国家,⽬前60 岁以上的⽼年⼈⼝已达1.43 亿,占总⼈⼝的11% ,并正以每年3 %的速度增长。
在未来的五年,我国60 岁及以上⽼年⼈⼝将从2005年的1.43 亿增加到2010 年的1.74 亿。
随着城市建设的发展,⼈们⽣活习俗的改变,家庭结构也发⽣了变化。
原来“三代同堂”、“四世同堂”、“⼉孙绕膝”的传统家庭⽣活模式正在逐渐退化。
城市独居⽼⼈的队伍越来越庞⼤,已成为不可忽视的社会问题。
独居⽼⼈的增多,带来⽣活照料,⽣病护理的困难,独居⽼⼈在家中发⽣重⼤意外⽆法⾃救的情况⽐⽐皆是,严重的可能对家庭造成不可挽回的遗憾等等。
本⽂重点介绍了在分析独居⽼⼈⽣活起居规律的基础上,将热释红外监控探头、单⽚机电路和⽆线电收发技术有机的结合在⼀起组成了应⽤于独居⽼⼈的⽆线监护系统,该系统安装⽅便,成本低,使⽤简单,应⽤前景好。
第1章应⽤于独居⽼⼈的⽆线监控系统简介1.1 系统主要功能和应⽤本系统主要⽤于独居⽼⼈的居室,根据需要通常在卧室和卫⽣间各设⼀个热释红外监控探头:1.卫⽣间:根据⽼⼈的⽣活习惯设置,当⽼⼈进⼊卫⽣间后超过⼀定时间未出来或超过⼀定时间未进⼊卫⽣间时,系统都要向监控室发送报警信号;2.卧室和床上:根据⽼⼈的睡眠时间设置,超过预定睡眠时间⽼⼈未上床或者到预定起床时间⽼⼈未起床,系统都要向监控室发送报警信号;3.主动呼救:当⽼⼈在家中遇有不适的状况需要帮助时,可直接按紧急呼救按钮;4.⾃动检测功能:因系统处于长期⼯作状态,为保证⼯作的可靠性,在设定的时间内,主机每天数次⾃动向各个分机发射检测信号,分机收到信号后即回送信息表⽰⼯作正常,否则系统会报警;5.正常⼯作时,当监控室主机收到报警信号时会⾃动显⽰出呼救⼈的地址并发出声光信息,同时向对⽅回送信息表⽰收到信号,报警⽅收到回送的信息后即停⽌发送,否则会连续发送报警信号。
基于AT89C51单片机失能老人智能床控制系统设计
基于AT89C51单片机失能老人智能床控制系统设计随着人口老龄化的加剧,失能老人的护理成为一个重要的社会问题。
为了提高失能老人的生活质量,智能床控制系统成为一种有前景的解决方案。
本文将基于AT89C51单片机,设计一种用于失能老人的智能床控制系统。
首先,我们需要了解失能老人面临的问题和需求。
由于身体机能衰退和活动受限,他们需要更多的帮助和关怀。
因此,智能床控制系统应当具备以下功能:自动调整床位高度、自动翻身、体位监测、报警功能等。
为了实现这些功能,我们选择AT89C51单片机作为系统核心。
AT89C51是一种高性价比且功能强大的单片机,具备丰富的外设接口和强大的计算处理性能。
首先,我们需要实现自动调整床位高度功能。
通过接入电动驱动装置和传感器模块到AT89C51单片机上,在传感器检测到失能老人需要调整床位高度时,单片机将发送信号给电动驱动装置来实现自动调整。
其次,在床位上加装压力传感器和体位传感器,以实现自动翻身和体位监测功能。
通过监测失能老人的体重分布和身体位置,单片机可以自动调整床位的角度,以减轻压力和改善失能老人的睡眠质量。
同时,单片机还可以通过与医护人员的通信接口,实现远程监控功能。
此外,智能床控制系统还应具备报警功能。
当失能老人发生意外或需要医护人员的帮助时,系统应当及时发出警报并通知相关人员。
通过接入声音传感器、红外传感器等装置到AT89C51单片机上,可以实现智能报警功能。
在设计过程中需要考虑到系统的可靠性、安全性和易用性。
为了提高系统可靠性,在硬件设计上采用双备份设计,并添加过压、过流等保护装置。
为了保证系统安全性,在软件设计中加入密码验证、远程控制权限等安全机制。
为了提高易用性,在用户界面设计上采用直观简洁的操作界面,并添加语音提示等辅助功能。
总之,基于AT89C51单片机失能老人智能床控制系统是一种有前景的解决方案。
通过实现自动调整床位高度、自动翻身、体位监测和报警功能,可以提高失能老人的生活质量和安全性。
基于盛群单片机的远程老人监护系统设计

基于盛群单片机的远程老人监护系统设计【摘要】本文从实际的需求出发,通过分析得出设计一款远程老人监护系统的必要性。
本设计基于盛群的单片机,通过配备的各种感应器测得老人生理参数信号,经过单片机的处理之后输出到液晶显示器中,当生理参数异常的时候,通过配备的GSM模块短信通知老人子女,实现对老人远程监护的目的。
【关键词】盛群单片机;生理参数;远程监护1.前言中国社会人口老龄化问题日益严重,同时慢性支气管炎、冠心病等老年人常见的疾病的发病率较高。
使得检测老年人人体各种生理参数的医疗仪器得到了广泛的应用。
但是在现在的医疗器械市场上销售的仪器所测量的参数都比较单一,只能测量心率或者血压等数据,而不能同时检测所必需的所有生理参数。
目前医院所采用的仪器检测的结果通常只能在屏幕上显示而不能输出数据,再对数据进行分析处理。
对于目前所采用的医疗器械的缺点,本文以盛群单片机为基础设计处了一个可以远程监护老人的系统。
不仅可以同时测量老年人的心跳频率、血压高低以及体温等数据,而且配备有也行显示器进行较好的输出、配备有语音控制装置和GSM模块来进行信息传递,便于子女及时获得父母身体条件的异常变化。
2.远程老人监护系统的总体设计本设计采用的是盛群HT66F50型号单片机,所需要实现的主要功能有老年人心跳频率、身体温度和血压高低等生理参数的收集、输出和短信通知。
系统的结构图如图1所示。
图1 系统结构图系统的工作过程如下:首先,依靠安装的体温信号采集器对身体的温度进行采集;用心率采集器对心跳频率进行采集;用血压信号采集器对血压的数据采集。
其次,对微弱的信号进行处理,由于采集到的血压信号较低而且含有干扰信号,所以需要将血压信号通过处理器进行线性放大,再分别经过两次滤波来消除干扰信号,使信号可以直接在单片机中被处理。
然后,将获得的三种信号传入单片机中进行分析处理最后,将处理之后得到的结果输出到液晶显示器中,并进行语音播报;当得到的结果超出老年人正常的生理参数范围的时候,通过GSM模块将信息发送到子女的手机中,及时通知子女以便于采取措施。
试析基于ZigBee的独居老人监护系统设计

试析基于ZigBee的独居老人监护系统设计作者:涂锦城欧阳伟王榕平来源:《科学与信息化》2018年第15期摘要本设计以8位MCS-51微处理器STC12C5A60S2作为控制器,完成基于ZigBee的独居老人监护系统设计。
本系统同时使用心率传感器、加速传感器、有毒气体检测传感器来实时检测当前人体活动情况以及空气质量数据信息,利用无线传感器ZigBee来完成信息传输,并把检测到的参数显示在液晶屏LCD1602上,同时该设备具有异常情况报警功能。
关键词 ZigBee;独居老人;监护1 总体方案设计本设计基于ZigBee的独居老人监护系统,将是用STC12C5A60S2作为主控制器,完成系统的控制功能,利用气体检测模块QM-135检测到空气中相关有害气体浓度是否超标、心率传感器pulseSeneor测量人体心率值是否超出范围以及三轴加速度传感器ADXL345检测老人是否跌倒,通过无线模块ZigBee把检测到的具体信息传输到接收端的液晶显示屏LCD602界面,且利用蜂鸣器来进行声音报警。
2 系统硬件电路设计2.1 数据采集电路设计基于ZigBee的独居老人监护系统一共分为数据采集电路以及监护电路,数据采集电路由C51单片机STC12C5A60S2作为控制中心,外面连接着心率数据采集电路、有毒气体数据采集电路、角度检测电路、显示电路以及ZigBee无线通信电路。
2.2 监护电路设计监护电路也是使用STC12C5A60S2作为控制中心,外面连接ZigBee CC2530芯片无线数据接收电路、数据显示电路以及蜂鸣器报警电路。
2.3 单片机最小系统电路单片机最小系统电路包含单片机控制器,晶振电路以及电源供电电路。
C51单片机STC12C5A60S2,在8051单片机的所有功能如指令、引脚等功能基础上进行了增强,程序内存可用空间可达62K,采用的FLASH工艺更是让存储空间具备了可插除与改写功能。
2.4 气体检测模块为了设计方便和操作灵活,本系统将使用MQ-135气体传感器模块来检测空气中的有害气体。
基于单片机的老人跌倒检测装置

基于单片机的老人跌倒检测装置#马少卿,孙荣霞,马征(河北大学电子信息工程学院,河北保定〇71〇〇〇)摘要:设计了一种基于单片机的老人跌倒检测装置,采用加速度、陀螺仪传感器采集原始信号。
在进行数据融合时采用自适 应互补滤波算法,从频域角度消除噪声。
针对该装置设计了一种计算量小的跌倒检测算法,并且加入了 G PS定位装置和GSM 短信模块。
实验证明该跌倒检测算法计算量小、误判率低,并且能够实现精准定位。
关键词:跌倒检测;加速度;无线通信中图分类号:TP212.9 文献标识码:A DOI:10. 19358/j.iss n. 1674-7720.2017.09.029引用格式:马少卿,孙荣霞,马征.基于单片机的老人跌倒检测装置[J].微型机与应用,2017,36(9):100-102,105.The fall detection device based on single chip microcomputerM a S h ao q i n g,S u n R o n g x ia,M a Z h e n g(School o f E le ctro n ic and Inform a tion E n g in e e rin g,H ebei U n iv e rs ity,Baoding071000,C h in a)A b s tra c t:A n elders fa ll detection device based on single chip m icrocom puter is designed in this paper.A ccelerom eter and gyro sensor are used to acquire the o rig in a l sig n a l.In the data fusion using adaptive com plem entary filte rin g a lg o rith m,from the frequency dom ain to elim in ate noise.A fa ll detection algorithm w ith sm all com putation is d e sig ned,and the GPS positio ning device and GSM SMS m ental results show t hat the a lg o ritlim has the advantages of low com putational c o m p le x ity,low false positive ra te,and accurate p o sitio n in g.K e y w o rd s:fa ll detection;acceleration;wireless com m unication〇引言研究表明,老年人跌倒发生率高,后果严重,是老年人 的首位伤害死因[1](而且跌倒的发生概率会随着年龄的增长而升高,如果能够及时救助,可有效降低跌倒老人的死亡率[2](目前研究开发人体跌倒检测系统方面的技术主要有两种:图像分析法和加速度分析法[3](基于图像分析法,准确率高,但是检测算法繁琐,成本高,不方便携带[3](基 于加速度分析法,不但成本低,而且不受环境的限制,功耗 低,方便携带[4](1系统总体设计本设计利用六轴陀螺仪加速度计M P U6050进行原始 信号的采集,采样频率为100 H z,在进行姿态解算时,利用 互补滤波器进行滤波,通过对三轴加速信号进行预处理,引入合成加速度。
电气专业 基于51单片机的老人防摔GPS定位报警

基于51单片机的老人防摔GPS定位报警摘要本产品设计了一种基于51单片机,利用ADXL345加速度传感器的跌倒实时检测系统,来实现来人摔倒后的报警。
用以完成老人跌倒后可以被及时发现并救助;它运用基于SVM阈值法的三次判别算法;精准判断老人是否摔倒。
设计还使用了GPS卫星定位模块;对老人摔倒后进行准确定位。
大量实践数据表明,设计产品对大多数情况都能正确判断,误报率较低,可有效的区分日常生活行为和跌倒行为,对老人摔倒检查正确率达到90%,稳定性,识别率很高。
关键词:加速度传感器;阈值法;跌倒检测AbstractThe design of this product is based on 51 single-chip computer, using ADXL345 accelerometer real-time fall detection system, to achieve the alarm after people fall. It can be found and rescued in time after the elderly fall. It uses the three-time discriminant algorithm based on SVM threshold method to accurately judge whether the elderly fall or not. GPS satellite positioning module is also used in the design, which can accurately locate the elderly after falling down. A large number of practical data show that the design product can correctly judge most cases, and the rate of false alarm is low. It can effectively distinguish daily life behavior and fall behavior. The correct rate of fall detection for the elderly is 90%, stability and recognition rate is high.Key words: acceleration sensor; threshold method; fall detection摘要 (2)1 概述 (5)1.1研究背景及意义 (5)1.2研究现状 (5)1.3应用前景 (5)2 线路设计 (6)2.1设计思路 (6)2.2模块分析 (6)2.2.1 GSM模块: (6)2.2.2 GPS模块: (7)2.2.3 ADXL345 模块: (7)2.2.4单片机STC12C5A60S2的功能及最小系统的电路设计 (8)3硬件简述: (11)3.1GPS模块VK2828U7G5LF部分 (11)3.2 ADXL345简要介绍 (18)3.3GSM模块简介 (20)4 软件设计 (22)4.1 keil应用 (22)4.2 Altium Designer应用 (22)4.3程序流程 (23)5.系统分析与调试 (25)6 设计心得体会 (27)参考文献 (28)附录 (30)原理图 (30)源程序 (30)1 概述1.1研究背景及意义随着社会人口比例的变化老年人占比越来越高,大多数家庭都出现了老人多,年轻人少的情况,老人的照顾不到位,那么老人的安全问题往往成为了每个家庭的安全隐患。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 138•基于单片机的老人监护系统西北民族大学电气工程学院 刘艳艳【摘要】21世纪以来,随着科技的发展,在人们的生活水平不断的提升的同时中国老龄化人口问题日益严重,再加上社会经济的发展。
许多子女外出打工,使得越来越多的空巢老人得不到及时有效的关心与治疗。
因此,本系统以老人为中心,并设定出许多相关的功能监护老人,让老人的生活变得更加的安全和方便。
本监护系统基于单片机通过传感器实时检测老人身体状态,并将状态信息进行处理转换后,通过外网发送到云服务器端。
系统通过构建云端数据库,将采集的信息和智能分析结果发送到手机客户端呈现给用户。
此外,倘若老人状态发生异常,本系统会自动做出及时的反应。
【关键词】空巢老人;单片机;监护系统1 引言该项目的名称是“基于单片机的老人监护系统”。
本系统可以通过脉搏心率传感器检测老人的脉搏状态,把老人的数据状态在单片机内部进行处理,然后反馈到PC 端通过上位机显示出来,这样可以让我们随时随地了解到老人现在的身体情况,以便对老人的突发情况能够做出及时的预防和处理!而且如今,随着老人年纪不断的增长,身体体质不断的衰弱,在上楼梯或者走斜坡的时候很容易会发生摔倒或跌倒,如果不及时的接收到治疗,很可能会造成很严重的后果。
本套系统可以通过三轴加速传感器实时检测老人是否跌倒以及GPS 模块定位功能,当老人跌倒时,本系统会自动发送老人所在位置的经纬度短信通知你和报警,让老人得到快速和有效的治疗。
不仅如此,随着老人年纪不断的增长,自身的体质和免疫力不断的下降,本套系统可以通过传感器不断的检测外界的情况,例如湿度,温度,PM2.5!再将数据反馈到手机或液晶屏上,以便你及时的对老人进行增添衣物和对疾病的预防。
2 老人监护系统的设计和组成本智能医疗系统是由STM32最小系统、GSM 模块、三轴陀螺仪、稳压模块、HX-M02 WIFI 无线透传模块、Arduino UNO 单片机及拓展板、心率脉搏检测装置等部分构成。
本系统设计将STM32最小系统以及外设电路作为中央控制器,Arduino uno 单片机及拓展板作为辅助控制器。
辅助控制器首先通过温湿度传感器将老人外界环境采集到的数值进行判断,并将采集到的数值通过WIFI 无线透传模块发送到服务器端的数据库中。
其装置本身还配有三轴陀螺仪和心率脉搏传感器,当遇到老人突然发生摔倒事件或心率脉搏突发异常时,本系统会自动的报警并发送短信到指定的移动号码上。
具体的实施过程为:(1)随着老人年龄不断的增长,其抵抗力变得越来越弱,为了更及时有效的预防外界环境的变化所给老人的感冒、着凉。
本系统通过HX-M02 WIFI 无线透传模块实时的将采集到的温度、湿度发送到云端数据库中,再通过编写手机客户端对数据库实时的读取,使得无论在何时何地都可以知道老人周围环境的数值,以便提醒老人是否添加衣物。
(2)本系统还可以通过脉搏心率传感器检测老人的脉搏状态,把老人的数据状态在Arduino UNO 单片机内部进行处理,然后反馈到PC 端通过上位机显示出来,这样可以让我们随时随地了解到老人现在的身体情况,以便对老人的突发情况能够做出及时的预防和处理。
(3)在对老人的姿态检测方面,我们决定采用MPU6050三轴陀螺仪对老人的姿态角度进行实时解析,以及再使用三轴加速度计来对老人是否摔倒的检测。
(4)在检测老人是否摔倒的软件编程方面,我们决定将三轴陀螺仪和三轴加速度计采集到的值进行控制算法处理,例如:PID 算法、卡尔曼滤波算法、互补滤波算法。
使得传感器能更好的检测到老人的姿态,减少传感器的误检。
(5)当老人摔倒时,STM32单片机会通过串口通信使GSM 模块向指定的号码拨打电话或发送短信,使得老人能够得到及时得到有效的治疗。
(6)本系统还集成了GPS 定位功能,当老人摔倒后,本系统会自动进行定位,并将老人所在位置的经纬度坐标通过文本短信形式发送到指定号码的移动设备上(7)由于本系统要实时上传采集到的数据,因此我们选用WIFI 模块连接手机热点或者4G 模块热点进行数据的接收与发送,这也打破了传统意义上网线连接的局限性。
在对WIFI 无线透传模块的配置中,我们通过串口对WIFI 模块所要连接的热点进行用户名、密码、连接服务器地址进行写入。
配置完成后,我们只需将热点的用户名、密码设置成与其配置的一致。
就可以自动的连接并进行服务器数据的交互。
图1 基于单片机的老人监护系统硬件框图3 老人监护系统的硬件选择及电路设计3.1 STM32最小系统和Arduino UNO单片机主控芯片STM32F103RBT6是以ARM 32的Cortex —M3为内核的处理器,最高工作频率可达72MHz ,内置大容量高速存储器,为处理老人大量的姿态算法数据提供了足够的内存和处理时间;具备FSMC 灵活的静态存储器控制器,用其来驱动液晶屏极大地提高了刷新率;同时,它内嵌有支持CAN 2.0B 的控制器,无需外扩专用芯片便可以组成CAN 网络。
因此作为此次模拟系统的中央控制器。
而作为辅助处理线程的Arduino uno 是基于A Tmega328P 的单片机开发板。
该开发板由14路数字输入/输出引脚(其中6路可以用作PWM 输出)、6路模拟输入、1个16MHz 的石英晶体振荡器、一个USB 接口、1个电源接头、1个ICSP 数据头以及1个复位按钮组成。
Uno 包含了单片机运行所需的所有要素,只需用USB 连接线将其连接到计算机,或利用AC-DC 适配器或电池供电后即可启动。
Uno 的特色在于将Atmega16U2编程为一个USB-to-serial 转换器,以便能简单、轻松和自由地安装驱动程序。
3.2 三轴陀螺仪模块MPU-6050整合了3轴陀螺仪、3轴加速器,并含可藉由第二个I2C 端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP :Digital Motion Processor)硬件加速引擎,由主要I2C 端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术。
我们将MPU6050陀螺仪模块与STM32最小系统板连接,单片机通过IIC 总线通讯协议读取转化采集到的角度姿态。
并通过软件滤波方式使输入的数据变得更加平滑与连续,从而系统检测变得更加稳定。
(下转第141页)• 141•标准方案:该方案配置编码器、IP复用器、QAM调制器,适配控制器。
可选:增加调频调制器和小功率调频发射机进行无线广播。
可转发上级控制信号和本地终端寻址,也可通过电话、短信进行应急广播。
在县级平台信号中断的情况下,也可以正常播出,完全不受县级平台影响。
优点:可完全脱离县级平台进行本地和应急广播。
缺点:成本偏高。
5.3 村级广播室村级应急广播平台技术方案。
村级平台,在村委会配置“适配扩大机”,收转上级信号,可以脱离上级,直接话筒讲话,也可以通过电话、短信进行应急广播。
在人口密集村庄安装室外型“收扩机”,有50W,100W可选;在社区安装“音柱”有25W,50W可选。
在街道可安装“室外LED 大屏”可显示文字和播放音视频节目。
为方便监控工作状态,远程终端可选择“GPRS模块”进行远程数据回转,随时上报数据和进行远程控制。
在村级平台,可选安装“电话播出编码控制器”,与县级平台的交换中心进行连接,控制中心为其分配特定的权限,需要应急广播时只需简单的操作就可发布应急广播信息。
为保证安全,在“电话播出编码控制器”,“适配扩大机”增加智能钥匙卡签权,没有钥匙卡无法通过系统安全认证,就无法传送应急广播信息。
终端(收扩机、音柱)可采用智能卡控制(可选),防止非法控制插播。
5.4 广播接收终端接收终端采用应急广播适配器(带功放)、智能多模收扩机、智能多模音柱,利用有线IP网络/4G无线网络、光纤同轴网络、数字接收天线、无线接收天线等网络接收上级广播信号,通过连接广播扬声器或音柱自带喇叭实现村、组广播声音覆盖。
6 系统规划(1)利用有线电视网络、地面无线数字电视网络以FM-RDS、DVB-C、DTMB技术方式有线/无线传输覆盖。
(2)利用政务专网、党员教育网、电信移动网、互联网通过有线IP网络、4G无线网络以IP方式传输覆盖。
(3)通过IP网络/移动网络(4G、GPRS)实现终端运行状态的回传监控网管。
(上接第138页)4 老人监护系统的软件程序设计4.1 STM32中央控制器的程序编写在STM32最小系统板的程序设计上,通过编程对寄存器操作以及SCL、CLK、SDA时序逻辑的转变从而使得温湿度传感器以及MPU6050三轴陀螺仪模块正常检测。
在检测老人是否摔倒的程序编写上,我们将MPU6050陀螺仪检测到的倾角数值通过卡尔曼滤波算法、低通滤波算法、PID算法使数值的变化曲线趋近于平滑的曲线,以便能够更好的对老人姿态进行准确的检测。
当单片机检测到老人摔倒后,再通过单片机的串口通信开启GPS定位功能,将老人所在位置的经纬度通过GSM模块短信文本发送到指定号码的移动设备上,以便老人能够得到及时的救治。
4.2 Arduino UNO单片机辅助控制器的程序编写由于脉搏传感器检测信号为模拟量,为了将其转化为数字量,我们需要接入ADC0832芯片以及外设电路,并通过单片机内自带的AD通道将其数值采集转换。
当检测到老人的脉搏发生异常时,通过IO的高低电平转换,控制GSM通过单品机的串口通信向指定的号码拨打电话和报警。
作为拓展,我们将Arduino连接HX-M02 WiFi模块,并通过外网传输将单片机采集到的温湿度数值以及脉搏传感器数值分别发送到程序指定的云服务数据库中,我们仅需在另一终端上登录指定数据库就可以将数值显示出来。
4.3 手机客户端的应用程序设计编写为了将检测结果更能简单方便的显示给用户,我们决定使用手机应用程序来读取数据库中老人身体状态的数值。
因此我们将采用Andriod Studio软件来进行安卓程序的编写。
在软件的开发中,我们设计了登录界面、老人状态显示界面。
并通过添加方法将登录、注册功能写入,增加了其系统的安全性。
当我们登录成功后,页面会自动跳转到老人状态显示界面。
在此界面中,文本框显示老人的身体状态数值,以及对数值进行分析得出合理性的建议。
在数据的接收和分析中,我们在云服务器中创建一个网页,并通过PHP语言编写条件的逻辑判断以及对数据库的读写操作,从而实现数据的交互传输。
5 结论本文通过对老人监护系统的硬件电路选择以及软件控制程序编写的介绍,系统结合了硬件优化结构的电路控制和单片机滤波程序控制两种方式,先经过模拟电路初步调节,再通过单片机程序软件逐步精细优化、以及安卓应用程序的不断测试修改。
在测试过程中,表现出了稳定、灵活、高效的特点,能够有效体现系统的方便智能,具有广阔的应用前景、市场价值。