OMRON伺服控制模块
欧姆龙 CJ1W-NC113 213 413 133 233 433 位置控制单元 说明书

CJ1W-NC113/213/413/133/233/433位置控制单元操作手册2003年2月修订ivv注意:欧姆龙制造的产品应根据有资格的操作者的正确程序并且仅使用本手册所描述的用途。
下面的约定用来标明在此手册中的警惕的种类。
要时刻注意有这些信息的地方。
如果不注意这些警惕会导致人和财产的伤害。
! 标明是紧急的危险状态,如果不避免将会导致死亡和严重的伤害。
! 标明是潜在的危险状态,如果不避免将会导致死亡和严重的伤害。
! 标明是潜在的危险状态,如果不避免将会导致轻或中等伤害或者损害财产。
欧姆龙产品参考所有的欧姆龙的产品在本手册都是大写。
“Unit”这个单词在指欧姆龙的产品时也要大写,而不管它是否出现在产品的合适的名字里。
缩写“Ch,”在一些展示和欧姆龙产品出现意为“字”,表示此意时在文档中也缩写为“Wd”。
“PLC”这个缩写意思为可编程控制器。
然而,“PC” 在一些可编程设备展示时意思也为可编程控制器。
视觉教具出现在手册左栏的下面的标题用来帮助你查找不同种类的信息。
表明对于有效的和方便的操作产品尤为有影响的。
1,2,3... 1.表明一种或者另一种的列表,比如程序,校验列表等。
OMRON, 2001保留的所有的权利。
未经欧姆龙公司的许可,不得以任何形式(机械的,电子的,影印的或其它)和手段(复制,存于检索系统或传递)使用本出版物的任何内容。
未经许可不可使用 在这里的信息。
此外,欧姆龙一直努力提高它的高质量产品,本手册包含的信息如果没有注释将遭受改变。
在准备本手册时已经考虑了任何预防。
虽然如此,欧姆龙对于过失或疏忽不负任何责任。
任何使用本出版物包含的信息所导致的伤害也不负任何责任。
危险警告注意注vi预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii 1针对的对象. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv2主要预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv3安全预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv4操作环境预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xvi5应用预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xvii6和EC指令兼容. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xix第1章介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1-1特点. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21-2系统配置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41-3基本操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51-4功能列表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81-5说明书. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101-6已有型号的比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131-7控制系统原则. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14第2章基本步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17第3章安装和连线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3-1术语和功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .223-2区域分配. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .233-3安装. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .243-4外部输入/输出电路. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .273-5连线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .373-6不同类型电机驱动器的连接实例. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .463-7未使用轴的连接. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .573-8伺服继电器单元. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58第4章数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 4-1总体结构. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .624-2数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .644-3公共参数区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .674-4轴参数区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .714-5操作存储器区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .904-6操作数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .934-7存储器操作数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .964-8区数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99第5章传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 5-1传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1025-2用写数据位写数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1095-3用读数据位读数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1155-4用IOWR写数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1205-5用IORD读数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .126vii5-6保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .130 5-7用CX-Position进行数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132第6章定义原点. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133 6-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .134 6-2原点搜索过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135 6-3原点搜索需要的数据设置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136 6-4原点搜索操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138 6-5原点搜索时间图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153 6-6当前位置预置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .158 6-7原点返回. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159 6-8Z相边缘. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .161第7章直接操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163 7-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .164 7-2直接操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .165 7-3为直接操作设置数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .165 7-4对直接操作的操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .167 7-5直接操作时序图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .169 7-6加速/减速. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .171 7-7样本程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .174第8章存储操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177 8-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .178 8-2存储操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .182 8-3为存储操作设定数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .182 8-4定位序列. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .184 8-5完成码. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191 8-6线性插补. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .196 8-7传送定位序列. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .199 8-8存储操作时序图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .202 8-9加速/减速. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205 8-10样本程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .208第9章其他操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211 9-1点动. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213 9-2示教. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215 9-3中断进给. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .217 9-4强迫中断. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220 9-5减速停止. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .222 9-6Override. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .227 9-7偏差计数器复位输出和原点调整命令输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . .230 9-8间隙补偿. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .234 9-9软件限位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .236 9-10停止功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239viii第10章程序实例. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241 10-1 程序例子的操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24210-2存储器操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24410-3直接操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26010-4轴线性差值法. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26710-5使用极限输入来进行原点搜索. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27310-6在脉冲输出中使用Override来改变速度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27510-7传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .278第11章故障表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285 11-1故障检修表格. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28611-2介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29311-3LED错误指示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29511-4读错误代码. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29711-5错误代码列表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29811-6释放脉冲输出禁止和在发生错误后复位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31311-7在CPU中的错误显示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31611-8用CX-Position读错误信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316第12章维护和检测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317 12-1检测. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31812-2常规检测. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31812-3预防处理. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31912-4替换PCU的步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .319附录A性能特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .321B估计对于加速/减速的时间和脉冲. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .329C公共参数区 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .331D错误码列表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .333E参数代码表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .337ix关于此手册:本手册描述了CJ1W-NC113/NC133/NC213/NC233/NC413/NC433定位控制单元的操作方法,包含下面讲述的几个部分。
欧姆龙 SERVO鼠笼式电机变频伺服控制器 说明书

Cat No.OEZ-DSCO0101SERVO 鼠笼式电机变频伺服控制器操作手册欧姆龙(中国)有限公司DRAGONOMRON注意事项安全注意事项● 接地端子(E:标牌中的标记)一定要可靠地接地。
未接地的情况下,有可能造成触电、误动作 的可能; 2 (请使用 2MM 以上的电线将装置电源端子台上的(E)端子接地) ● 请使用规定的电源电压,本系列的控制器使用单相 AC220V 电源电压; ● 对伺服控制器的安装、拆卸要在切断电源 5 分钟以后,并确认了 P-N 端子间的电压在 24V 以下 时再进行。
否则会造成触电、故障、误动作。
运行中要注意的键盘操作要点● 修改 QMCL 参数、用户参数时,不要超出规定的范围;否则,会由于误动作而造成装置的损坏和 事故; ● 请由熟悉 QMCL 参数、用户参数的内容及操作方法的技术人员进行参数修改的操作; ● 不要改变 QMCL 参数 NO.71(码盘补偿)的设定;否则,会由于误动作而造成装置的损坏和事 故;请根据电机与码盘的脉冲数设定该项参数。
DRAGON 伺服控制器外形欧姆龙(中国)有限公司1DRAGONOMRON目第一章、硬件部分 1.1 伺服控制器的功能和特点 1.2 伺服控制器型号、外形尺寸 1.3 三相鼠笼式变频感应电机的参数 1.4 伺服控制器技术规格表 1.5DRAGON 伺服控制器各部分说明 1.6 伺服控制器的信号端说明 1.7 关于 CPU 的电池 1.8 关于伺服控制器控制主板上的跳线开关 1.9 开关量输入/输出检查、编码器输入检查 第二章、软件部分 2.1 伺服控制器的运行 2.2 伺服控制器的程序 2.3 系统参数及用户参数 2.4QMCL 语言祥解 2.5 编程中的注意事项 第三章、伺服控制器操作流程 3.1 操作流程 3.2 快速操作说明录3 4 5 6 7 9 9 9 1011 12 14 27 3436 37第四章、应用例子 ---------------------------------------------------------------------------------------------------- 39 第五章、故障分析 5.1 故障信息 5.2DRAGON 系列伺服控制器的保护功能 5.3 故障分析 第六章、维护及检修 6.1 维护、检修 6.2 故障预防40 40 4142 42欧姆龙(中国)有限公司2DRAGONOMRON第一章、硬件部分1-1 伺服控制器的功能和特点 1.1.1 简介 DRAGON 系列伺服控制器是鼠笼式电机变频伺服控制器,可对鼠笼式电机的位置、 转速、加减速和输出转矩通过编程方便地进行控制。
欧姆龙控制伺服电机的程序实例
欧姆龙控制伺服电机的程序实例一、程序准备:1.准备欧姆龙 PLC 控制器,并通过计算机连接PLC,进行编程;2.伺服电机,其输入端和输出端分别接入控制器;3.控制器软件,包括指令模板及编程语言等。
二、程序的编写:1.编写控制程序,完成伺服电机操作。
2.为节点内部的内容定义一个可编程节点地址,以满足节点的要求。
3.设定伺服电机的输入参数,如输入电压、电流、电压限制等。
4.定义伺服电机的输出参数,如位置控制输出参数、速度控制输出参数等。
5.编写软件参数准备程序,来读取PLC上设定的伺服电机参数,并定义控制方式。
7.定义伺服电机运行中的状态,如模式选择、速度切换、运行时间等。
8.将控制及状态程序进行编程,实现与伺服电机的集成。
9.编写调试程序,检查程序功能,保证在正常运行过程中,伺服电机机械及控制系统的正常运行。
10.将程序下载到控制器中,然后检查程序是否运行正常,确认控制功能及状态输出是否准确无误。
三、启动操作:1.连接控制器,确保控制器与伺服电机的连接状态是正确的;2.开机,查看控制器的运行状态,确保控制器正常运行;3.运行下载的控制程序,开始伺服电机的运行;4.观察伺服电机的运行情况,如果发现问题,根据情况检查是否有对程序的设置错误;5.确认没有问题,持续观察控制器的运行情况,确保伺服电机连续正常工作。
四、总结:以上是欧姆龙 PLC 控制伺服电机的程序实例,它需要通过控制器上载编程软件,并通过程序的编写、参数设置、调试实现伺服电机的控制。
总之,欧姆龙 PLC 控制伺服电机的程序是一个复杂的系统,需要技术人员具备丰富的编程经验,才能完成控制伺服电机的任务。
NC213 413培训资料培训1

一 NC模块介绍
3.系统配置
PCU接收来自设备和控制台的控制 信号(CW/CCW限制,原点,原点接近 急停信号等),并输出脉冲序列到伺服 或步进驱动器。 可使用PC通过编程口进行程序 修改和监控。
一 NC模块介绍
4.控制数据流程
二 操作流程
二 操作流程
三 硬件接线
1.输出电路规格
1.1 集电极开路:30毫安 (带1.6K电阻的终端为16毫安)
五 原点搜索
5. 原点检测方法:
5.2 方法1: 在原点接近信号上升沿后就检测原点输入信号
※停止位置由减速时间决定,减速能在接近信号的上升沿和下个Z相信号间 完成,则检测到Z相信号就能停止,否则必须等减速完成后再检测Z相信号 停止。
五 原点搜索
5. 原点检测方法:
5.3 方法2: 不使用原点接近信号,执行原点搜索时以原点接近速度运行。
OMRON NC位置控制单元
欧姆龙自动化集团 客户服务中心 SMAC课 缪维洲 2007/3
主要内容
• 一NC模块介绍
1.1 1.2 1.3 1.4 概述 特点 系统配置 控制数据流程
• 二 操作流程 • 三 硬件接线
3.1 3.2 3.3 3.4 4.1 4.2 4.3 4.4 4.5 4.6 输出电路规格 输出脉冲形式 输入电路规格 接线示例 总体结构 公共参数区 公共参数设置方法 轴参数区 操作数据区 操作存储器区
五 原点搜索
6.3 单方向模式: 原点搜索仅在单方向进行
7 .原点搜索方向
0: 顺时针方向 1: 逆时针方向
※设置了原点搜索方向后,以此方向的原点输入信号将一直被检测。
五 原点搜索
8. 原点搜索参数设置方法:
欧姆龙CJ1W-MD211模块使用说明和程序案例

omron伺服驱动器

omron伺服驱动器
佚名
【期刊名称】《变频技术应用》
【年(卷),期】2013(008)001
【摘要】功能介绍omron伺服驱动器开发SMARTSTE PZ系列,是为了可以将步进电机作为脉冲串输入型的位置控制电机使用的同时,还能作为普通步进电机简易定位系统使用。
同时,它还可以做到以往步进电机较为欠缺的高速、高转矩的短时间定位,
【总页数】1页(P108-108)
【正文语种】中文
【中图分类】TM921.541
【相关文献】
1.罗升ELMO伺服驱动器为特种环境设计的伺服驱动器 [J],
2.力士乐伺服驱动器与OMRON PLC无协议通信的应用 [J], 李明富;孙朝辉
3.罗克韦尔自动化推出的具有EtherNet/IP功能的新型伺服驱动器为低轴数机器提供经济实用的协调运动控制Allen’BradleyKinetix350伺服驱动器将基于EtherNet/IP的集成运动控制拓展到规模更小的应用 [J],
4.OMRON视觉系统的位置修正应用 [J], 王新刚
5.基于OMRON视觉系统的机器人零件分拣装配系统 [J], 王新刚
因版权原因,仅展示原文概要,查看原文内容请购买。
OMRON-plc控制伺服电机

OMRON-plc控制伺服电机
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON-plc控制伺服电机。
OMRON AC伺服电机 伺服驱动器 说明书

!
危
险
表示一个紧迫的危险情况,如不避免,会造成人员死亡或严重伤害。而且可能造成严重 的财产损失。 表示一个潜在的危险情况,如不避免,可能会造成人员死亡或严重伤害。而且可能造成 严重的财产损失。 表示一个潜在的危险情况,如不避免,可能导致轻度或中度的人身伤害或财产损失。
!
警
告
!
注
意
欧姆龙产品附注
所有欧姆龙产品在本手册中都用大写字母表示,当“单元”表示欧姆龙产品时,它也以大写字 母表示,不管它是否以产品的正式名称表示。 在某些显示中和某些欧姆龙产品上出现的缩写“Ch”往往指“字”,这个意义在文件中缩写为 “Wd”。 缩写“PLC”指的是可编程序控制器,不用作其他任何产品的缩写。
OMNUC W /
OMNUC W
R88M-W R88D-WT
I531-CN5-05
AC
AC
I531-CN5-05
I531-CN5-05
200609S01
注意:
欧姆龙产品是为合格的操作人员按照正常步骤使用,并只为本手册中所叙述的目的而制造的。 下列约定是用来指出本手册中的注意事项,并对其进行分类。务必注意它们所规定的情况。不 注意这些事项可能导致对人体的伤害或危及财产。
1-1 1-2 1-3 1-4 1-5 特点 ............................................................................................................................................................... 1-2 系统配置 ....................................................................................................................................................... 1-7 伺服驱动器术语 ........................................................................................................................................... 1-9 适用标准和型号 ......................................................................................................................................... 1-10 系统模块图 ................................................................................................................................................. 1-11
欧姆龙PLC和SEW伺服控制器EtherNet IP通讯
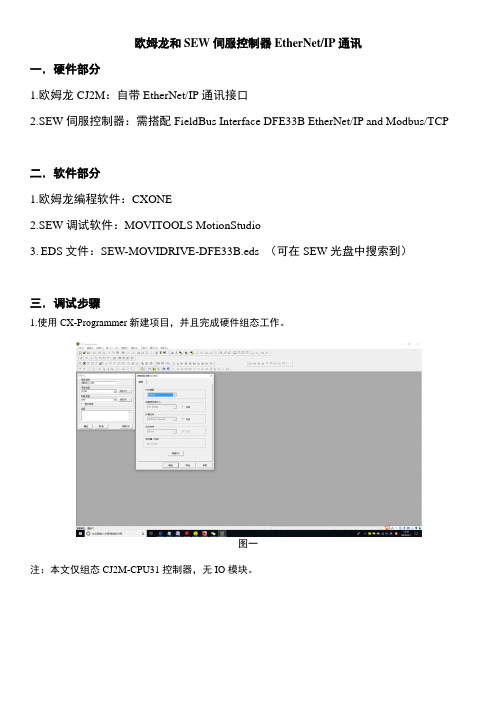
欧姆龙和SEW伺服控制器EtherNet/IP通讯一.硬件部分1.欧姆龙CJ2M:自带EtherNet/IP通讯接口2.SEW伺服控制器:需搭配FieldBus Interface DFE33B EtherNet/IP and Modbus/TCP二.软件部分1.欧姆龙编程软件:CXONE2.SEW调试软件:MOVITOOLS MotionStudio3.EDS文件:SEW-MOVIDRIVE-DFE33B.eds (可在SEW光盘中搜索到)三.调试步骤1.使用CX-Programmer新建项目,并且完成硬件组态工作。
图一注:本文仅组态CJ2M-CPU31控制器,无IO模块。
2.在新建项目中“符号”中新建二个新符号,例如:a.名称:FromSEW01;数据类型:INT;地址或值:D100(数据区);网络变量:输入;高级设置:数组符号,数组大小10;b.名称:ToSEW01;数据类型:INT;地址或值:D200(数据区);网络变量:输出;高级设置:数组符号,数组大小10;图二注:红圈为新建通讯数据变量时需注意的地方。
图三注:图为建好的变量。
3.在CX-Programmer中将项目在线,在编程模式下下载程序。
4.打开“IO表和单元设置”,选择“内置端口/插入板”,设置欧姆龙PLC IP地址,然后点击“传送PC到单元”,如图。
图四注:PLC的模式应为“编程模式”,IP地址末尾会在PLC屏上显示。
5.打开CX-ONE软件组件中“Network Configurator”,在“EtherNet/IP Hardware”→Vendor →OMRON Corporation →Communication Adapter ,双击“CJ2M-EIP21”将模块添加到右侧网络视图中。
图五6.右键添加的图标,选择change node address,更改IP地址,需和PLC地址保持一致。
图六7.双击图标会弹出“Edit Device Parameters:192.168.0.10 CJ2M-EIP21”,点击Import,会自动上传刚刚在CX-progarmmer中建立的2个变量:FromSEW01,ToSEW01。
NJ使用EtherCAT控制ISN

NJ使用EtherCAT控制ISNOMRON NJ通过EtherCAT控制IS620N使用说明1、准备工作1.1、软件:OMRON Sysmac软件,至少1.0.9.47以上;1.2、硬件:IS620N EEPROM中至少已升级IS620N-Ecat_v1.7.xml文件(出厂已设置);1.3、配置文件:至少IS620N-Ecat_v1.7.xml,版本为:0X00010000;注意:Sysmac软件为OMRON NJ编程软件;IS620N中必须烧录xml文件,若公司出厂未烧录,可使用BeckHoff软件TwinCAT通过EtherCAT总线烧录;xml文件需要导入到Sysmac软件中,作为识别IS620N驱动器的配置文件;2、实施步骤2.1、NJ、IS620N通电,通过网线连接注意:IS620N 下端口为IN,上端口为OUT,接线时请注意;2.2、将xml文件复制到Sysmac软件安装目录下:C:\ProgramData\Omron\SysmacStudio\IODeviceProfiles\Esi Files\UserEsiFiles2.3、新建工程2.4、通讯设置2.5、打开EtherCAT配置2.6、从右侧toolbox中选择IS620N,可以拖拽、双击方式在EtherCAT网络下增加站点,根据实际添加从站个数;2.7、注意,若是刚出厂新伺服,则需要写入节点地址,选择”在线”-右击“主设备”-“写入设备节点地址”,新伺服刚接入NJ系统中节点默认为0,修改成不为零即可,修改完毕后,选择“与物理网络配置比较并合并”2.8、选择”应用物理网络配置”2.9、选择CPU扩展机架-“与实际单元配置比较和合并”2.10、选择需要设置的节点号,选择”编辑PDO映射设置”2.11、输出输出映射设置(重要)输入PDO:控制字:6040;模式选择:6060;目标位置:607A;探针功能:60B8;输出PDO状态字:6041;模式显示:6061;实际位置:6064;探针状态:60B9;探针1位置值:60BA;探针2位置值:60BC;错误码:603F;数字输入:60FD;2.12、选“运动控制设置”-“轴控制”-添加-轴设置2.13、设置轴类型-伺服器轴(其中有伺服轴、编码器轴、虚轴概念),选择输出设备2.14、根据PDO配置中使用到的数据,配置输出、输入数据以及数字信号,注意PDO映射不可以设错,否则控制器会报错轴错误注:60FD对于DI状态:伺服报:ER950:P-OT 即正向超程;ER952:N-OT即反向超程;2.15、设置编码器分辨率以及电机一圈需要的位置值2.16、速度限制2.17、选择回原点方式以上、轴配置设置完成.3、程序中通过功能块控制伺服3.1、使用MC_Power控制伺服使能3.2、使用MC_Move实现相对、绝对定位功能3.3、使用MC_MoveJog实现点动功能3.4、使用MC_Home实现原点回归功能,使用回原点之前可以先确认.NJ中限位与原是否正常!MC_Axis000.DrvStatus.N_OT 正限位MC_Axis000.DrvStatus.P_OT 负限位MC_Axis000.DrvStatus.HomeSw 原点开关注:IS620N中仅需要修改如下参数:H0C-05 EtherCAT 站号Kitch.Gong2015-01-12。
欧姆龙伺服驱动器参数导出
欧姆龙伺服驱动器参数导出简介欧姆龙伺服驱动器是一种常见的电机控制设备,广泛应用于工业自动化领域。
为了实现对伺服驱动器的精确控制,我们需要了解和导出其参数。
本文将详细介绍欧姆龙伺服驱动器的参数导出方法及相关注意事项。
参数导出方法欧姆龙伺服驱动器的参数可以通过以下几种方式进行导出:1. 使用软件工具欧姆龙提供了专门的软件工具,例如CX-Drive,用于配置和管理伺服驱动器。
通过该软件,可以直接读取和导出伺服驱动器的参数。
具体操作步骤如下: 1. 安装CX-Drive软件并打开。
2. 连接电脑与伺服驱动器,确保通信正常。
3. 在软件中选择相应的连接方式(例如串口、以太网等),建立与伺服驱动器的通信连接。
4. 选择要导出的参数类型(例如位置、速度、加速度等)。
5. 点击“导出”按钮,将参数保存到指定文件夹中。
2. 使用编程语言如果需要批量导出多个伺服驱动器的参数,可以使用编程语言(如Python)来实现自动化导出。
以下是一个简单示例:import omron_cx_drive_api# 连接伺服驱动器drive = omron_cx_drive_api.connect('COM1')# 读取参数parameters = drive.read_parameters()# 导出参数到文件with open('parameters.txt', 'w') as f:for param in parameters:f.write(f'{}: {param.value}\n')以上代码使用omron_cx_drive_api库连接伺服驱动器,并将参数导出到parameters.txt文件中。
3. 手动记录如果只需要导出少量参数或者无法使用软件工具或编程语言,可以手动记录伺服驱动器的参数。
首先,需要了解伺服驱动器的各个参数含义和取值范围。
然后,在伺服驱动器的控制面板或调试界面上查找相应的参数,并手动记录下来。
OMRON 变频伺服 说明书

欧姆龙自动化(中国)有限公司客户服务中心1目录目录变频伺服Q1.变频器一运行报接地短路故障,如何处理? (1)Q2.为什么变频器一上电空气断路器就跳闸? (1)Q3.为什么变频器带电机在加减速过程中报主回路过电压故障? (1)Q4.为什么变频器带电机在低频运行时出现电机过载报警? (1)Q5.变频器一启动就对附近的控制设备产生干扰,如何处理? (2)Q6.CP1系列PLC使用Modbus-RTU简易主站功能和变频器做485通信时,变频器报通信超时错误(3G3MZ CE10;3G3MV/RV CALL),如何处理? (2)Q7.变频器带电机运行一段时间电机会过热,如何处理? (2)Q8.3G3JZ和3G3MZ-ZV2的主要区别? (3)Q9.3G3RX如何进行多段速控制? (3)Q10.变频器操作面板如何延长? (4)Q11.为什么伺服电机高速旋转时发生电机偏差计数器溢出错误? (5)Q12.控制器的脉冲指令已经执行但是伺服电机还是不运转,如何处理? (5)Q13.伺服电机在没有带负载的情况下报过载,如何处理? (5)Q14.伺服电机运行时会出现异常声音及抖动现象,如何处理? (5)Q15.伺服电机做位置控制定位不准,如何处理? (6)Q16.伺服电机在做位置控制时一运行就报超速故障,如何处理? (6)Q17.G伺服的样本说明中有连续使用区域和重复使用区域是什么含义的? (6)Q18.R88D-G设定参数后,断电上电发现参数丢失? (7)Q19.NC模块X轴如何做直接操作? (7)Q20.NC模块如何做内存操作? (7)Q21.NC模块的ERC错误灯点亮,如何处理? (8)Q22.MC模块控制伺服电机时伺服刚开始运行就报偏差计数器溢出错误,如何处理? (8)Q23.OMRON哪些产品支持直线插补,圆弧插补? (8)CPUQ1.CP1系列PLC的Lot Number读取规则是什么? (9)Q2.CP1E-E和CP1E-N的区别是什么? (9)Q3.CP1E/CP1L扩展的注意点有哪些? (9)Q4.CP1E的电池需要另配吗;电容后备能多久? (9)Q5.CP1E是否支持仿真? (9)Q6.C200Ha后的-Z和E是什么含义? (9)Q7.OMRON有哪些PLC支持冗余? (10)Q8.OMRON有哪些PLC支持在线更换单元? (10)Q9.CS/CJ在机架报错I/O 校验错误,如何处理? (10)Q10.PLC的电源指示灯不亮,如何处理? (10)Q11.CP1H如何利用内存盒覆盖原有程序? (10)Q12.CS/CJ如何使用存储卡进行备份? (11)Q13.为什么PLC电源经常损坏故障? (11)Q14.CPM提示I/O总线错误,如何处理? (11)Q15.CX-Programmer下传程序的时提示UM区被保护,如何处理? (11)Q16.为什么PLC串口损坏? (12)Q17.为什么PLC上电后,程序不运行? (12)欧姆龙自动化(中国)有限公司客户服务中心2 Q18.为什么PLC 控制输出带的负载不动作? (12)Q19.CP1系列高速计数当前值如何断电保持? (12)Q20.如何监控PLC 内存? (13)Q21.功能块编译时报下标缺失,如何处理? (13)Q22.CX-programmer7.3编译功能块出错? (14)Q23.如何通过IO 表计算电源消耗? (14)Q24.CX-Programmer 窗口混乱,如何恢复? (15)Q25.OMRON 的浮点数据格式是怎么样的? (15)Q26.使用多条CMP 指令时有什么注意点? (16)Q27.SCL 指令应用案例 (16)Q28.SCL2指令应用案例 (17)Q29.MOVD 指令的解释 (18)人机界面Q1.触摸屏和PLC 上电连接后程序画面不显示,如何处理? (20)Q2.触摸屏上电和计算机连接后无法下载画面程序,如何处理? (20)Q3.触摸屏如何安装系统程序? (20)Q4.触摸屏显示和PLC 内数据不符合,如何处理? (21)Q5.NT31/631(C)程序转如何换为NS 程序? (22)Q6.NT5Z 程序如何转换为NP 程序? (23)Q7.NP/NT5Z 是否支持1:N NTLink 协议? (23)Q8.NS 动画功能如何实现? (24)Q9.NT31/NT631如何加密? (24)Q10.NP 如何加密? (25)模拟量Q1.CP1H-XA 的内置模拟量功能在使用过程中突然提示内置模拟量异常,如何处理? (26)Q2.如何设定中型机模拟量输入模块? (26)Q3.如何设定中型机模拟量输出模块? (27)Q4.模拟量输入信号受干扰,如何处理? (27)Q5.如何进行中型机模拟量故障判断? (28)Q6.如何设定中型机温控单元? (28)通讯Q1.CPM2A 串口无法和CX-Programmer 软件通信,如何处理? (30)Q2.CS/CJ 串口无法和CX-Programmer 软件通信,如何处理? (30)Q3.CP1H 使用USB 口无法和CX-Programmer 软件通信,如何处理? (30)Q4.使用第三方开发软件与OMRON 的PLC 无法进行串口通讯,如何处理? (31)Q5. CP1系列PLC 使用Modbus-RTU 简易主站功能和变频器做485通信时,变频器报通信超时错误(3G3MZ CE10;3G3MV/RV CALL),如何处理? (31)Q6.CP1W-CIF11与CP1W-CIF12的区别是什么? (31)Q7.CP1W-CIF11/12的DIP 设定规则是什么? (31)Q8.如何使用CP1W-CIF11/CJ1W-CIF11进行422/485方式通讯? (31)Q9.两台CP1H/CJ1M/CP1L 使用PC Link 通信,如何操作? (32)Q10.CP1E-N 的1:N PCLink 链接地址是什么? (32)Q11.PLC 内置的232串口使用TXD 指令无法发送数据,如何处理? (32)Q12.使用RXD 指令无法接收到数据,如何处理? (33)欧姆龙自动化(中国)有限公司客户服务中心3Q13.PLC使用协议宏读取第三方设备的数据时内存区里面没有反馈数据,如何处理? (33)Q14.如何使用CJ1W/CS1W-ETN21模块实现与CX-Programmer软件进行通信? (33)Q15.CP1W-CIF41使用时有哪些限制? (33)Q16.CLK21模块数据无法进行交换,如何处理? (34)Q17.DRM21模块提示D5错误,如何处理? (34)Q18.DRM21模块提示E2错误,如何处理? (34)保护产品Q1.SDV无法正常检测输入信号动作不正常是什么原因? (35)Q2.K2CU检测多个加热器并联使用时无法正常检测断线是什么原因? (35)Q3.K8AB-AS输出继电器无法正常输出是什么原因? (35)Q4.SE的过载检测功能无法正常工作是什么原因? (35)Q5.K8AC-H无法检测三相回路断线的原因是什么? (35)Q6. K8AB-PM的UNDER灯闪烁怎么处理? (36)Q7. SE的3E(过载、缺相、相序)是通过什么方式来检测的? (36)数显表Q1.数显表停产产品和替代产品的区别有哪些? (37)Q2.数显表显示A.ERR和B.ERR还有S.ERR是什么原因? (38)Q3.数显表分别有哪些通讯方式? (38)Q4.数显表上显示“-----”是什么原因? (39)Q5.数显表面板无法修改参数是什么原因? (39)Q6.数显表和上位设备通讯不上怎么办(RS-232C和RS485方式)? (39)Q7.数显表实际值和显示值有偏差是为什么? (40)Q8.K3HB和PLC进行BCD方式通讯,但是PLC内存通道无法读取当前数据为什么? (40)ZENQ1. ZEN同定时器计数器优缺点比较 (41)Q2..ZEN软件和ZEN通讯不上是什么原因? (41)Q3.ZEN软件无法选到-V2版本的型号是什么原因? (41)Q4.ZEN软件无法对状态位进行监控是什么原因? (41)Q5.ZEN面板ERR灯闪烁是什么原因? (41)Q6.ZEN和PLC通讯不正常是什么原因? (42)温控器Q1.温控器报S.ERR错误(E5□Z/N/K/R,E5ZN,EJ1系列)应该如何解决? (43)Q3.温控器报警输出没有输出或者输出情况不对,什么原因? (43)Q2.温控器显示的温度和实际温度有偏差,怎么解决? (44)Q4.OMRON的温控器和PLC通讯不上,如何解决? (44)Q5.温控器实现加热控制,初始升温会出现PV超过SP好几度的现象,如何解决? (45)Q6.温控器参数无法更改,是什么原因造成的? (45)Q7.温控器做加热控制,设置都正确,温控器上电之后负载不动作,是什么原因? (46)Q8.测温体导线是否可以延长? (46)Q9.加热器已经断线,但是HBA输出点没有输出,是什么原因? (46)Q10.温控器为什么选不到AT和P、I、D这几个参数? (46)Q11.温控器有的菜单选不到,是怎么回事? (47)Q12.温控器一上电℃闪烁,这是什么原因?如何消除? (47)Q13.新版E5_Z和老版E5_Z相比有什么区别,新增了什么功能? (47)欧姆龙自动化(中国)有限公司客户服务中心4 Q14. PLC 和E5□Z 通讯,但是无法修改输入类型,为什么? (47)Q15. E5□Z 面板出现TEST 字符是什么故障? (47)Q16. 第二代、第三代的E5□N 有的型号是一样的,如何来区分? (47)Q17. EJ1和G3ZA 进行通讯,但是CX-THERMO 无法识别G3ZA 是为什么? (48)定时器Q1.定时器故障分析 (49)Q2.是否可以在定时器工作的时候切换时间单位或定时时间 (49)计数器Q1.H7EC_N 系列显示故障如何解决? (50)Q2.时间计数器在输入信号后为什么显示长时间没有变化? (50)Q3.预订标功能如何使用? (50)Q4.H7ET-N 选择是时间单位是0.0 to 3999d23.9h,当显示了23.9后再会怎么显示? (50)Q5.计数器故障分析 (50)继电器Q1.并联2个继电器接点后,开关容量会是2倍吗? (51)Q2.固态继电器相对于中间继电器有什么优点? (51)Q3.固态继电器选型要素有哪些? (51)Q4.继电器故障原因: (51)Q5.继电器测试按钮的功能是什么? (52)Q6.接交流负载的固态继电器可以接直流负载吗? (52)Q7.使用固态继电器在输出侧接一个指示灯,在没有输入电压时该灯会微亮,为什么 ? (52)Q8.在开关直流负载时容易产生反向感应电压,固态继电器的输出元件经常会损坏,有什么措施可以避免此类情况发生? (53)Q9.三相加热器用固态继电器G3PB 系列中二元件型和三元件型有什么区别? (53)Q10.是否可以用万用表直接测固态继电器的输出侧来判断固态继电器的好坏? (53)开关Q1.按钮开关故障分析 (54)Q2.带灯型按钮开关的显示灯作用是什么? (54)Q3. 微动开关的耐高温和耐低温系列 (55)Q4.微小负载使用于一般负载的开关上,是否可以? (55)Q5.微小负载用的开关有哪些? (55)Q6.限位开关的耐高温和耐低温系列? (55)液位开关Q1.液位开关检测热水的注意事项 (56)Q2.液位开关控制器上的动作显示灯的亮灭状态和水泵的动作状态相反的原因是什么? (56)Q3.液位开关的检测液体中混入油,尽管很少但偶尔会引起动作和复位不良的原因是什么? (56)Q4.成套电极棒如何组合? ......... (56)Q5.液位开关的公共电极棒需要接地的目的是什么? (56)欧姆龙自动化(中国)有限公司客户服务中心5Q1.漏液设备:K7L-AT50/K7L-AT50D和61F-WLA/61F-GPN-V50的区别? (57)Q2.检知带F03-16PE/F03-16PT/F03-15的使用区别? (57)Q3.K7L-AT50配合F03-16PS(点式漏液传感器),正确接线后,为什么上电就显示断线报警? (57)RFIDQ1. V600的数据载体是否可以用在V700系列的系统中? (58)Q2. V680中要对数据载体中进行数据的读取、写入,一种是以ASCII码方式,一种是以16进制方式,现在要写1,2,3,4这样的数字,用哪一种? (58)Q3.有时候读写头读取Tag有不稳定现象,有时能读到,有时又读不到,为何? (58)位移传感器Q1.ZS系列的位移传感器通讯注意事项有哪些? (59)Q2.位移.测长传感器选型要素有哪些? (59)Q3.如何将位移传感器4-20mA的模拟信号转换为1-5V模拟信号? (59)Q4. ZX-L-N上显示的距离为什么是负数? (60)Q5. ZX-LD30VL,ZX-LDA11-N配合使用,设置下限值0.21上限值0.25,但是现在测量值为0.23,PASS却不输出,为何? (60)Q6. 检测0.5mm厚的物体是否重叠,堆放物体的传送带会有些许晃动,可以选用什么传感器? (60)视觉传感器Q1.为什么检测图像需要进行二值化处理? (61)Q2.各视觉传感器控制分辨率列表 (61)Q3.视觉传感器检测精度的计算 (61)Q4.为什么视觉传感器在没有错误信息出现的时候,ERR输出信号会置ON? (62)Q5.手持控制器的电缆可以延长吗? (62)Q6.在视觉传感器F160上,如何实现对已存储图像的再测量? (62)Q7.FZ3控制器上的设置文件是否可以直接应用到FZ的控制器上? (62)安全产品Q1.安全光幕的安全等级是多少? (63)Q2.安全继电器单元两通道型是怎么动作的? (63)Q3.电磁式安全门开关为什么不能锁定? (63)Q4.安全光幕自动复位和手动复位的区别是什么? (63)Q5.安全光幕错误灯亮,应该怎么解决? (64)Q6、安全光幕投光器和受光器中间没有挡物体的时候输出OFF? (64)Q7、安全光幕在使用过程中,有物体从光幕中间经过,但是输出还是ON状态? (64)Q8、电磁式安全门开关的机械锁定和电磁锁定怎么理解? (64)光电传感器Q1.光电传感器检测到物体后输出状态没有变化? (65)Q2.光电传感器输出信号不稳定的原因有哪些? (65)Q3.有哪些光纤可以在高温或者低温环境下使用? (66)Q4.E3X-DA-S、、E3X-DA-N、、E3X-DAC-S系列的区别是什么? (66)Q5.E3JK继电器输出的型号怎么接线? (67)Q6.微型光电传感器直流光与变调光方式的区别是什么? (67)欧姆龙自动化(中国)有限公司客户服务中心6 Q1.接近传感器检测到被测物体,后续设备都不动作,为什么………………………………………………………68 Q2.有哪些接近传感器可以在高温或者低温环境下使用? …………………………………………………………68 Q3.接近传感器有误动作现象,如何解决?……………………………………………………………………………69 Q4.接近开关和OMRON 的PLC 怎么接线?………………………………………………………………………………69 Q5.接近开关是否可以串联或者并联使用? …………………………………………………………………………70 旋转旋转编码器编码器Q1.单旋转绝对值型编码器和多旋转绝对值型编码器有什么区别? ......................................................72 Q2.增量型编码器接到计数器上,出现计数误差的情况?.....................................................................72 Q3.增量型编码器接到PLC 中,PLC 读不到数值?..............................................................................72 Q4.如何判断选装编码器的好坏? (73)欧姆龙自动化(中国)有限公司客户服务中心 7变频伺服变频伺服Q1Q1..变频器一运行报接地短路故障变频器一运行报接地短路故障,,如何处理如何处理??原因:接地电流超过额定输出电流的50%以上。
OMRON NX701-Z600 Sysmac NX7 AI控制器产品说明书

NX701-Z600Sysmac NX7 AI Controller, 80MB memory, built-in EtherCAT (128 servo axes, in total 512 EtherCAT nodes) and 2 EtherNet/IPportsIndustrial AutomationController functionality AI control, Motion control, Sequence control Primary task cycle time0.125 msProgram memory80 MBVariables memory260 MBMax. number of synchronous axes128Max. number of axes (incl. virtual)128Communication port(s)EtherCAT Master, EtherNet/IP, Ethernet TCP/IP Communication option(s)NoneMax. number of remote I/O nodes512I/O system NX I/O BusMax. number of expansion units0Product Height (unpacked)100 mmProduct Width (unpacked)132 mmProduct Depth (unpacked)100 mmGX-JC033-port EtherCAT Junction module, 24 VDC power supplyGX-JC066-port EtherCAT Junction module, 24 VDC power supplyGX-JC06-H6-port EtherCAT Junction module, 24 VDC power supply, with node switchesHMC-SD492 4 GB SD memory cardNX-PA9001Sysmac NX power supply unit, 100 to 240 VAC, 90 W, "RUN" output relayNX-PD7001Sysmac NX power supply unit, 24 VDC, 70 W, "RUN" output relayW4S1-05D 5-port enhanced Ethernet switchCJ1W-BAT01Battery for CJ1M PLCsNX-END01Replacement end cover for NX I/O seriesAI Controller Standard SoftwareOperation ManualENPDF 6.07 MBAI Machine Automation Controller BrochureENPDF 5.18 MBAI PredictiveMaintenance Library Users ManualEN PDF 2.13 MBArtificial Intelligence Machine Automation Controller Users ManualEN PDF 6.87 MBData validity check BrochureEN PDF 202 KBFDK CR-series cylindricalBattery Safety DatasheetENPDF 133 KBHigh-speed inspection BrochureEN PDF 319 KBMachine Safety Solution BrochureEN PDF 2.86 MBNJ/NX Series BrochureEN PDF 4.18 MBNJ/NX-series -[EtherCAT]- CKD ABSODEX driver (AX9000TS/TH-U5)Connection GuideEN PDF 1.73 MBNJ/NX-series -[EtherCAT]- Hitachi ADV-Series AC Servo DrivesConnection GuideEN ZIP 4.29 MBNJ/NX-series -[EtherCAT]- Inficon gauge (BPG402-SE)Connection GuideEN PDF 1.22 MBNJ/NX-series -[EtherCAT]- Kashiyama Dry Vacuum Pump (E-CAT01 1ch)Connection GuideENPDF 1.59 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-CKD Sensor (PPX series)Connection GuideEN PDF 2.43 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-CKD Sensor (WFC series)Connection GuideEN PDF 2.75 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-CKD WFK2 Flow sensorConnection GuideEN PDF 2.09 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-MTS Sensors (E-Series)Connection GuideEN PDF 2.4 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-PATLITE Beacon (NE-IL)Connection GuideEN PDF 2.02 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-PATLITE Tower (LR6-IL)Connection GuideEN PDF 2.08 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-SMC (ISA3-xxx)Connection GuideEN PDF 2.61 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-SMC (xSE20Bx-L(-M/-P)-x)Connection GuideEN PDF 2.13 MBNJ/NX-series -[EtherCAT]- NX-ECC + NX-ILM400 -[IO-Link]-SMC ITVx000/-IO*Connection GuideEN PDF 1.89 MB NJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-SMC Servo 24VDC(JXCL1)Connection GuideEN PDF 2.23 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-Schmalz Ejector (SCPSi)Connection GuideEN PDF 2.4 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm (O5D10x/O5D15x)Connection GuideEN PDF 2.42 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm (PN7x94)Connection GuideEN PDF 2.72 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm (TN24xx)Connection GuideEN PDF 2.74 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm TR7439 Pt100/1000Connection GuideEN PDF 2.43 MBNJ/NX-series -[EtherCAT]- NidecSankyo S-FLAG II SeriesAC Servo (DB6xx41)Connection GuideEN PDF 2.65 MBNJ/NX-series -[EtherCAT]- SANYODENKI AC ServoSANMOTION R 3EMODEL TYPE SConnection GuideEN PDF 3.08 MBNJ/NX-series -[EtherCAT]- SANYODENKI AC ServoSANMOTION RADVANCED MODELTYPE FConnection GuideEN PDF 3.61 MBNJ/NX-series -[EtherCAT]- SHIMADZUPower Unit for TurboMolecular Pump (TMP)Connection GuideEN PDF 1.29 MBNJ/NX-series -[EtherCAT]- SICKAbsolute Encoder(AFS60/AFM60)Connection GuideEN PDF 1.52 MBNJ/NX-series -[EtherCAT]- SchmalzCompact Terminal(SCTSi-ECT)Connection GuideEN PDF 1.33 MBNJ/NX-series -[EtherCAT]- WeidmüllerRemote I/O System (u-remote IP20)Connection GuideEN PDF 1.8 MBNJ/NX-series -[EtherCAT]- YASKAWAΣ-7-seriesConnection GuideEN ZIP 3.77 MBNJ/NX-series -[EtherNet/IP]- Balluff BNIEIP-50x-105-Z015Connection GuideEN PDF 3.35 MBNJ/NX-series -[EtherNet/IP]- CKDABSODEX Driver(AX9000TS/TH-U6)Connection GuideEN PDF 1.71 MBNJ/NX-series -[EtherNet/IP]- HilschernetTAP NT100 Gateway(NT 100-RE-DN)Connection GuideEN PDF 3.5 MBNJ/NX-series -[EtherNet/IP]- IAI RCONsystem & MCON /MSCON / MSEPControllerConnection GuideEN PDF 1.9 MBNJ/NX-series -[EtherNet/IP]- KOGANEIManifold Solenoid Valve(F Series)Connection GuideEN PDF 2.43 MBNJ/NX-series -[EtherNet/IP]- NordsonProBlue AdhesiveMeltersConnection GuideEN PDF 2.61 MBNJ/NX-series -[EtherNet/IP]- ORIENTALMOTOR αSTEPCompatible Driver (AZD-xEP)Connection GuideEN PDF 1.82 MBNJ/NX-series -[EtherNet/IP]- SMCSolenoid Valve (SI UnitEX260-SEN#)Connection GuideEN PDF 1.65 MBNJ/NX-series -[EtherNet/IP]- SchmalzK.K. Compact Terminal(SCTSi-EIP)Connection GuideEN PDF 1.69 MBNJ/NX-series -[EtherNet/IP]- ifm IO-Link master (AL1322)Connection GuideENPDF 3.18 MBNJ/NX-series -[EtherNet/IP]- ifm IO-Link master (AL1920)Connection GuideENPDF 3.07 MBNJ/NX-series Machine Automation Controller BrochureEN PDF 1.81 MBNJ/NX-series Machine Automation Controller Database Connection CPU UnitBrochureENPDF 1.37 MBNJ/NX/NY-seriesSysmac Library User’s Manual for SafetySystem Monitor LibraryUsers ManualENPDF 922 KBNX/NY AI Machine Controller DatasheetENPDF 971 KBQuality gate for each process BrochureENPDF 167 KBSysmac CatalogueEN PDF 43.5 MBSysmac: A Fully Integrated Platform BrochureENPDF 10.2 MB。
欧姆龙PLC程序CP1H伺服定位,模拟量控制程式(完整注释,JOG,定长,主从站通信,模拟量控制,步进控制)

00000 (000000)隔膜纠编步进前限位(CCW ) 000001 (000002)隔膜纠编步进后限位(CW ) 000002(000004) 000003(000010) 000004(000015) 000005(000021) 000006 (000026) 000007(000028)00008(000030)00009(000038) <580.02>b 042 a048 000010(000048) <580.04>b 050 a05500011(000055) 000012(000058)纠偏回原点中00013(000062)纠偏原点确定00014(000064) 000015(000069) 000016(000074)000000(000086)000001(000088)000002(000090)000003(000092)000004(000094)000005(000096)000006(000098)000007(000100)000008(000102)000009(000104)000010(000106)胶带浮棍下信号000011 (000108)胶带切刀张开信号000012 (000110)胶带切刀退回信号000013 (000112)胶带切刀移出信号000014 (000114)贴胶吸盘转备胶位信号00015 (000116)贴胶吸盘转贴胶位信号 000016 (000118)贴胶吸盘退回信号00017 (000120)贴胶吸盘伸出信号00018 (000122)贴胶步进前限位 000019 (000124)贴胶步进后限位 000020 (000126)压胶带上信号 000021 (000128)压胶带下信号 000022 (000130)夹胶带手指张开信号00023 (000132)夹胶带手指闭合信号00024 (000134)拉胶带退回信号 000025 (000136)拉胶带移出信号 000026 (000138)贴胶吸盘真空信号00027(000140)P LC 通信正常000028(000142)00029(000149)<500.00>a 152 a190 <500.01>b 154 a163 000030 (000159) 000031 (000161) 000032(000163) <500.02>a 165 a191 <500.03>b 167 a172 000033(000172) 000034(000175)<500.07>a 287 000035(000190) 000036(000193) <501.00>a 201 000037(000199) <501.00>a 201 000038(000204) <501.01>a 212 000039(000210)a 212 000040(000215) 000041(000221) <501.02>a 222 <501.03>b 226 000042(000231)c 218 c250 c26600043(000237) <501.04>a 238 <501.05>b 242 000044(000247)00045(000253)<501.06>a 254 <501.07>b 258 000046(000263) 000047(000269) <501.08>a 270 <501.09>b 27400048(000279) 000049(000283)贴胶滑台初始位确定00050(000285) 贴胶滑台位置1确定00051(000287) 贴胶滑台位置2确定00052(000289) 贴胶滑台位置3确定00000(000292)000001(000297).<400.02>a 303 000002(000302).<400.02> a 303 000003(000306) <400.03>a 312 000004(000311) <400.03>a 312000005(000315) <680.02>b 323 a330 000006(000328)轴1原点确定 <680.05>a 332 a407 a429 000007(000330)轴1原点确定 <680.05>a 332 a407 a429 000008(000332) 000009(000336)<cD00770> c 350 000010(000342) <533.03>a 344 <533.04>b 348000011(000353)[OP1]00012(000359) <533.05>a 361 <533.06>b 365 000013(000370) 000014(000376) <532.03>a 379<532.04>b 382000015(000387) 000016(000393) <533.10>a 396 <534.06>b 39900017(000404) 000018(000407)轴1原点位确定 <530.06>a 441 000019(000429)卷绕原点确定00020(000431)一次卷绕完成00021(000433)000022 (000435)仿形卷绕完成000023 (000437)一次贴胶卷绕完成000024 (000439)二次贴胶卷绕完成000025(000441)卷绕夹爪初始位(000444)00000(000000) 000001(000002) 000002(000005) 000003(000008) 000004 (000011) 000005(000013) [OP1]<T0322(bit)>a 01500006(000015)(000018)。
欧诺克 直流伺服 驱动器 产品说明书

深圳市欧诺克科技有限公司Shenzhen ONKE Technology Co., Ltd.座机:*************27381841电话:邓先生135****7106陈先生139****0920邮箱:***************网 址 : 地址:广东省深圳市宝安区福海街道怀德翠湖工业园13栋稳定的质量是我们赖以生存的根本优质的服务是我们继续发展的前提客户的满意是我们唯一追求的目标产品画册Product gallery专业生产伺服驱动器、伺服电机及自动化控制系统深圳市欧诺克科技有限公司直流伺服驱动器目录匠心制造精益求精“一、公司介绍03二、直流伺服驱动器091.驱动器介绍与型号说明092.DC系列技术指标133.DE系列技术指标174.DE2系列技术指标215.BC系列技术指标256.驱动器应用领域297.驱动器外设配件31 0102C O M P A N Y PROFILE以精密制造引领未来Leading the future with precision manufacturing公司简介Company Profile深圳市欧诺克科技有限公司成立于2010年,是一家专业研发生产伺服电机和驱动器的高新技术企业,公司技术力量雄厚,检测手段先进,欧诺克人本着不求最全,只求最精的信念,为生产出各类伺服电机、各类驱动器而不懈奋斗。
欧诺克人以鹰的精神,挑战尖端,生产出性价比的各类伺服电机和驱动器,以鹰的敏锐洞察力洞察市场,随时改进、创新来满足市场的需求。
深圳市欧诺克科技有限公司产品主要有:伺服驱动器、伺服电机、直流伺服驱动器,直流伺服电机,交流伺服驱动器,交流伺服电机,低压伺服驱动器,低压伺服电机,直线电机驱动器,DDR马达驱动器,音圈电机驱动器,直流无刷驱动器,直流无刷电机,CANopen总线,EtherCAT总线,电子凸轮伺服系统,大功率伺服驱动器、大电流伺服驱动器,专用伺服驱动器和自动化控制系统,十年来凭借精湛的技术与国内国外众多知名企业公司建立了互利共赢的合作。
欧姆龙 OMRON工控产品常见问题集第三期

问题分类
软件
CXP
张伟静
A: 遇到的问题:CX-PROGRAMMER 版本为 4.0,CX-PROTOCOL 版本为 1.11,先安装了 CX-PROGRAMMER, 然后安装了 CX-PROTOCOL,然后启动 CX-PROGRAMMER 发现运行出错,然后再运行 CX-PROTOCOL 提 示 CX-SERVER 故障。 分析软件,CX-PROGRAMMER 版本为 4.0,其所带的 CX-SERVER 版本为 2.1,而 CX-PROTOCOL 版本为 1.11,其所带的 CX-SERVER 为 1.1。而且在安装 CX-PROTOCOL 时,系统提示:发现当前的 CX-SERVER 版本为 2.1,是否需要安装 CX-SERVER 版本 1.1,如果你选择否,则安装完成的 CX-PROTOCOL 运行也是出 错,选择是,则 CX-PROGRAMMER 运行出错。 解决办法,先安装 CX-SERVER 低版本的软件,将 CX-PROGRAMMER 在安装完 CX-PROTOCOL 之后安装,。 然后再安装 CX-PROGRAMMER,经过这样安装的两个程序在运行中都没有问题。
元器件
问题分类 马达继电器
徐欢
A: 设置步骤: 1:SE-KQP2N 的马达继电器上的电流倍率设置为 2,整定电流设定为 10,这样整定电流即为 10 X2=20A。 2:电流倍率设置为 2 以后,导体的贯通次数固定为 1 次。 3:因为动作电流=整定电流值*115%,这样的话,实际的动作电流为 20 *115%=23A。
接线如下
17.Q:新买的 H7EC-N 计数器,给输入信号但是输出无动作,屏幕无 显示?
元器件
A:在使用前需将内部电池前端的防漏电插片拔掉,计数器才能正常工作 。
欧姆龙PLC控制伺服电机单轴运动程序

4.相对坐标
W5.02 MOVL
(498)
[OP1] [OP2]
D100 D24
分层预压设定 压制高度低位 伺服定位-脉冲 输出设定量低 位
<cD00024>
c46
000010 (000040) W5.02 20.10 PLS2
(887)
#0 #0010 D20 D26
[OP1] [OP2] [OP3]
[OP1] [OP2] [OP3] <cD00015>
c17 c20 <15.02> a32
SET 15.02 000008 (000032) 15.02 14.10 SPED
(885)
伺服下降 按钮
I:1.01
#0 #0010 #0
[OP1] [OP2] [OP3]
<15.02> a32
RSET 15.02 000009 (000038)
伺服定位-加速 比率
<cD00020>
c10 c50
[OP4]
伺服定位-启动 频率低位
<cD00026>
c14 c50
A280.03 20.10
<20.10> b41
000011 (000045)
5.绝对坐标(相对于原点坐标的位置)
W1.03 MOV
(021)
D102 D24
[OP1] [OP2]
伺服定位-脉冲 输出设定量低 位
伺服定位-启动 频率低位
<cD00026>
c42 c50
MOV
(021)
#0 D27
[OP1] [OP2]
伺服定位-启动 频率高位
OmronSysmac伺服调试简洁版

Motor速度
增益调整 最佳时
增益调整 不足时
约4ms 时间
约200ms以上
5、过载检出的问题
Servo电机有额定转矩、超过这个值连续使用的话电机就会烧损。 保护其不被烧损的就是过载检出(Err.16)。 Servo电机的最大转矩可以输出至额定转矩的300%、其会在Driver内部对电机内部温度 进行计算、达到一定量以上就检出。
4、定位完成的问题
<现 象> 这个问题、在客户的Application中会以以下的现象显现。
●Servo的动作结束后、到下一次的Servo动作开始前所耗费的时间较长。 ●Servo的连续动作突然中途停止不动了。但是又没错误代码显示。 <原 因>
如果Servo的增益调整不足、定位完成信号的输出就会有延迟、甚至不输出。 通过CX-Driver来确认定位完成信号的状况、如果有问题要对增益进行调整或者 把定位完成的宽度设大。
<陥波滤波器・制振控制的调整> 无论是陥波滤波器还是制振控制、虽然控制方法不同、但基本的考虑方 法都是一样的。将振动频率的增益局部调低。可以达到既不振动、增益设 定又非常高的效果。 <陥波滤波器・制振控制的效果> 将共振部分的增益、设定为完全相反的负增益以此来打消。 可实现增益整体较高的设定、还能提高响应性。
伺服增益参数调试原则:
伺服系统各参数之间总是相互制约的,如果只有位置回路增益增 加,位置回路输出的指令可能会变得不稳定,以致整个伺服系统的反 应可能会变得不稳定。通常可参照下列步骤对系统进行调整:
a)将位置环增益即先设在较低值,然后在不产生异常响声和振动的前 提下,逐渐增加速度环的增益至最大值。 b)逐渐降低速度环增益值,同时加大位置环增益。在整个响应无超调、 无振动的前提下,将位置环增益设至最大。 c)速度环积分时间常数取决于定位时间的长短,在机械系统不振动的 前提下,尽量减小此值。 d)随后对位置环增益、速度环增益及积分时间常数进行微调,找到最 佳值。
OMRON柔性运动控制器FQM1在高速绕线机中应用的探讨
第46卷第6期2009年6月妻珏器7jZ4.帖’,'ORMERvd.46JuneN0.62009劁到到OMRON柔性运动控制器FQMl在高速绕线机中应用的探讨赵利军,杨世方(西安启源机电装备股份有限公司,陕西西安710021)摘要:介绍了在高速绕线机中应用的OMI≈ON柔性运动控制器的配置、特性及功能。
关键词:绕线机;控制器;性能中图分类号:TM403.9文献标识码:B文章编号:1001—8425(2009)06-0030—05DiscussiononApplicationofOMRONFlexibleMotionControllertoHigh-SpeedWindingMachineZHAOLi-jun,YANGShi-fang(Xi’anQiyuanMachinery&ElectronicEquipmentCo.,Ltd.,Xi7an710021,China)Abstract:Thedistribution,characteristicandfunctionofOMRONflexiblemotioncontrollerforhigh-speedwindingmachinearepresented.Keywords.Windingmachine;Controller;Characteristic1前言由于近年来自动控制技术尤其是伺服控制技术和伺服控制装置(控制器与驱动器、伺服电机)的发展异常迅猛,运动控制作为自动化技术的一个重要分支在20世纪90年代国际上发达国家已经进入快速发展的阶段。
由于有强劲市场需求的推动,运动控制技术发展迅速、应用广泛。
运动控制器作为一个独立的工业自动化控制类产品已经被越来越多的产业领域接受并且它已经达到一个引人瞩目的市场规模。
因而也使得变压器制造设备的更新换代越来越快,以适应市场激烈竞争的需要。
笔者就高速绕线机中应用OMRON柔性运动控制模块FQMI的一些特点作一介绍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OMRON伺服控制模块
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON伺服控制模块。