嵌入式数控机床的设计与实现
机床数控系统中嵌入式plc的设计
机床数控系统中嵌入式plc的设计在机床数控系统中,电气设备的控制占有重要的地位。
目前,一般采用可编程控制器(PLC)进行机床电气控制。
PLC可靠性高,使用方便,对于复杂的,控制点数较多的应用场合,可以在PLC基本单元外加上一定数目的扩展单元,实现复杂的电气控制功能。
在数控机床上。
如果采用PLC进行电气控制,必需在PLC与NC 间建立电气联系,否则,NC程序中的MST指令反映不到PLC中,PLC也就不可能做出相应的动作。
目前市场上出售的PLC一般都具有通讯功能,可以利用这种功能在PLC与NC之间建立联系。
由于PLC的通讯方式为串行通讯,通讯速度比较低,对于数控机床的某些实时性要求很强的信号如急停,超程等。
就难以胜任一必需采取其它措施满足这些特殊需要,但这又增加了系统的复杂程度。
为了提高速度,降低戚本。
在数控系统中t可以采用开关量I/O板加外接继电器,配台主机的软件对电气开关进行控制。
但此方案周NC主机要直接参与电气控制逻辑的运算过程。
占用了主机的部分工作时间,增加了软件的复杂程度。
更重要的是。
把过多的功能集中到主机使主机-发生故障的风险加大出于对实时性和可靠性的考虑。
在研制五轴联动数控系统的过程中。
设计了一种嵌入式PLC.在保证实时性的同时。
使故障风险相对分散。
1 嵌入式PLC的硬件结构我们研制的五轴联动数控系统是一种基于工业PC 的多CPU分布式开放化数控系统。
做为其中的一部分,嵌入式PLC的设计也必需遵循开放化的原则。
其硬件是模块化的。
按照标准的工控机插卡进行设计。
目前,工控机的底板总线有两类:ISA总线和PCI总线。
ISA总线的数据转输速率比PCI总线要低得多。
但已完全能够满足一般工业控制的需要,而且ISA 总线对工控机扩展卡的要求比PCI要宽松。
从已有的工业应用经验看。
可靠性也比较高。
因此我们仍选择ISA总线做为嵌入式PLC设计的基础。
嵌入式PLC的组成参图1嵌入式PLC的CPU 采用Intel16 位单片机80C196。
数控机床的嵌入式可编程控制器的研究与开发

得到拓扑有序序列的 1, 2, 3, 4, 5, 6, 7, 8,结合对应的图素功
能 ,得语句表程序如下:
L D X01;
AN D
X0 2;
LD
X0 4;
OR
X0 6;
AN D
X0 5;
L DO RB;
· 1010·
机械科学与技术
第 17卷
AN D
X 03;
LD
X 07;
LDO RB; O U T Y01; 2. 2 编译技术 用户 源程序通过 编译程序 ,将其转 换成计算 机可执 行
图 2
2. 1 PL C编程器 PL C输入源程序最常 用的方式是 梯形图和 语句表。梯
形图 是以图形方 式来表达 源程序的逻 辑关系 ,它与一般 电 气原理图十分接近 ,因此直观明了。语句表是一种 与计算机 汇 编 语 言类 似 的 助 记 符 编 程 表 达式 ,逻 辑 性 强。嵌 入 式 PL C编程器 可以分 别使用 这两 种不同 的输 入方式 对用 户 源程 序进行全屏 幕编辑 ,而且能够 实现二者之 间的相互 转 换 ,以满足不同用户的编程需要。
表示 某些运 算的运 算顺序 ,
故 又 称 无 括 号 表 示 [5]。例
图5
如 ,对 形如 x= A- B /( C+ D)的赋值语句 ,可按后辍式写 成 X ABCD+ /- = 。
在按 后辍表示的 表达式中 ,由于各 种运算总 是依运 算
出现的顺序来执行 ,故它的计算结果很容易实现和获得。为 此 ,从左到右依次扫描表达式中的各个符号 ,将运 算对象依
第 17卷 第 6期 1998年 11月
机械科学与技术 M ECHAN ICAL SCIENCE AND T ECHNO LOGY
基于嵌入式Linux数控系统设计与实现
安全性和可靠
软件安全:采用 Linux操作系统, 具有较高的安全 性
可靠性测试:经 过严格的测试和 验证,确保系统 可靠性
实时性分析:对系 统的实时性进行分 析和优化,确保满 足数控加工的要求
实际应用案例分析
嵌入式Linux数控系统在工 业自动化领域的应用
实时性能:保 证系统的实时 性,以满足数 控加工的要求
安全性:提高 系统的安全性, 防止病毒和黑
客攻击
标准化:推动 行业标准化, 促进不同系统 之间的互操作
性和兼容性
行业应用前景与市场机遇
嵌入式Linux数控系 统在智能制造领域的 应用将不断扩大
随着工业4.0的推进, 嵌入式Linux数控系 统的市场需求将持续 增长
嵌入式Linux数控系统的 设计与实现
,a click to unlimited possibilities
汇报人:
目录
01 添 加 目 录 项 标 题 03 嵌 入 式 L i n u x 数 控
系统的硬件设计
05 嵌 入 式 L i n u x 数 控 系统的实现与测试
02 嵌 入 式 L i n u x 数 控 系统概述
嵌入式系统具有 低功耗、小体积、 低成本等特点, 广泛应用于工业 控制、智能家居、 医疗设备等领域。
嵌入式Linux数 控系统是一种基 于Linux操作系 统的嵌入式系统, 用于实现数控加 工、自动化控制 等功能。
数控系统的概念和应用
数控系统是一种用于控制机床的计算机系统,能够实现高精度、高效率的加工。
选择合适的开发工具和软件库,简化软件设计和开发过程,提高开发效率 和软件质量。
驱动程序开发与设备管理
驱动程序的作用: 连接硬件和软件, 实现数据传输和控 制功能
基于PLC的嵌入式数控机床控制系统设计
基于PLC的嵌入式数控机床控制系统设计一、引言随着现代制造业的发展,数控机床在加工领域中的应用越来越广泛。
数控机床的控制系统是数控技术的核心,它直接影响着数控机床的性能和精度。
传统的数控机床控制系统一般采用PC或专用的控制器进行控制,但是由于PC系统的不稳定性和专用控制器的高昂成本,使得这些控制系统在一定程度上受到了限制。
近年来,基于PLC的嵌入式控制系统逐渐受到了广泛关注,它具有稳定性高、成本低等优点,逐渐在数控领域中得到应用。
本文将重点介绍基于PLC的嵌入式数控机床控制系统的设计原理和方法,希望能为相关领域的研究和实践提供一定的参考价值。
1. PLC的基本原理PLC(Programmable Logic Controller,可编程逻辑控制器)是一种专门用于工业控制的计算机,它通过输入输出模块与外部设备进行数据交换,并通过逻辑控制指令对外部设备进行控制。
PLC一般由CPU、输入模块、输出模块、通信模块等部分组成,其中CPU负责处理逻辑控制指令,输入模块负责将外部设备的信号输入到PLC中,输出模块则负责将PLC产生的控制信号输出给外部设备。
2. 嵌入式数控机床控制系统的基本原理嵌入式数控机床控制系统是指将数控系统的控制模块直接嵌入到数控机床的控制器中,与数控机床的其他部件进行紧密结合,以实现对机床的自动控制和运行。
嵌入式数控机床控制系统的基本原理是通过PLC作为控制模块,接收数控程序的指令,运行数控算法,生成控制信号并交给数控机床的执行部件,从而实现对数控机床的精密控制。
1. 总体设计在设计基于PLC的嵌入式数控机床控制系统时,首先需要对数控机床的控制要求进行分析,包括控制精度、速度要求、多轴控制要求等。
然后根据控制要求设计PLC的选型和相关外围设备的选择,确定PLC的输入输出模块、通信模块等。
2. 软件设计在软件设计方面,需要编写数控编程软件,以实现数控程序的输入、编辑和管理。
编写控制算法程序,根据数控程序生成相应的控制信号,实现对数控机床各轴的控制。
数控机床嵌入式远程测控系统设计与实现
关键 词 : 控 机床 ; 入 式 系统 ; 数 嵌 远程 测控 ;aa C I Jv ;G
中图分类号 :P7 :0 2— 8 1 20 )0— 10— 3 10 14 ( 08 1 0 0 0
De i n a d Re l a i n o sg n a i to fEm b d d Re o e z e de m t
M e s e c nto y tm 0 a ur . o r lS se f r NC a hi e To l M c n o
一个典型的嵌入式系统设计和实现[五篇模版]
![一个典型的嵌入式系统设计和实现[五篇模版]](https://img.taocdn.com/s3/m/edd3dce1ab00b52acfc789eb172ded630b1c9812.png)
一个典型的嵌入式系统设计和实现[五篇模版]第一篇:一个典型的嵌入式系统设计和实现关键字:嵌入式系统设计ARM FPGA 多功能车辆总线Multifunction Vehicle Bus在计算机、互联网和通信技术高速发展的同时,嵌入式系统开发技术也取得迅速发展,嵌入式技术应用范围的急剧扩大。
本文介绍了一种基于ARM和FPGA,从软件到硬件完全自主开发多功能车辆总线(Multifunction Vehicle Bus)MVB??B嵌入式系统的设计和实现。
系统设计和实现通常来说,一个嵌入式系统的开发过程如下:1. 确定嵌入式系统的需求;2. 设计系统的体系结构:选择处理器和相关外部设备,操作系统,开发平台以及软硬件的分割和总体系统集成;3. 详细的软硬件设计和RTL代码、软件代码开发;4. 软硬件的联调和集成;5. 系统的测试。
一、步骤1:确定系统的需求:嵌入式系统的典型特征是面向用户、面向产品、面向应用的,市场应用是嵌入式系统开发的导向和前提。
一个嵌入式系统的设计取决于系统的需求。
1、MVB总线简介列车通信网(Train Communication Network,简称TCN)是一个集整列列车内部测控任务和信息处理任务于一体的列车数据通讯的IEC国际标准(IEC-61375-1), 它包括两种总线类型绞线式列车总线(WTB)和多功能车厢总线(MVB)。
TCN在列车控制系统中的地位相当与CAN总线在汽车电子中的地位。
多功能车辆总线MVB是用于在列车上设备之间传送和交换数据的标准通信介质。
附加在总线上的设备可能在功能、大小、性能上互不相同,但是它们都和 MVB总线相连,通过MVB总线来交换信息,形成一个完整的通信网络。
在MVB系统中,根据IEC-61375-1列车通信网标准,MVB总线有如下的一些特点:拓扑结构:MVB总线的结构遵循OSI模式,吸取了ISO的标准。
支持最多4095个设备,由一个中心总线管理器控制。
数控机床嵌入式远程测控系统设计及实现

数控机床嵌入式远程测控系统设计及实现随着数控机床的广泛应用,对于机床的监控管理也越来越重要,传统的机床在生产过程中存在很多不稳定性,需要不断通过人工干预来维护机床的正常运行。
这些问题严重影响了机床的可靠性、稳定性和效率。
随着嵌入式系统的开发,人们可以通过嵌入式远程测控系统实现对于数控机床的远程监控,从而解决了传统机床所存在的问题。
数据采集与传输数控机床嵌入式远程控制系统的核心是数据采集与传输,即通过传感器实时获取机床的状态信息,并将采集到的数据通过无线网络传输到总控制中心进行分析和处理。
该嵌入式远程测控系统的采集指标包括工作温度、耗电量、坐标位置、刀具负荷、生产效率等指标。
这些采集指标可以通过不同的传感器来获取,传感器的种类按照功能可以分为温度传感器、压力传感器、光学传感器、电感传感器等。
对于数据传输来说,传输的方式可以通过有线传输和无线传输来实现。
有线传输一般采用以太网或串口的方式,通常选择以太网进行数据传输。
无线传输一般通过Wi-Fi或蓝牙进行数据传输,无线传输的最大优势在于传输范围大,方便接入。
数据处理与分析数据处理与分析是数控机床嵌入式远程测控系统的关键环节,它所处理的是从机床上获取的数据,需要对其进行分析和处理。
处理这些数据的主要任务是实现对于机床的预警及诊断,从而提高机床的生产效率。
系统采用的技术主要包括数据挖掘、信号处理、数学建模及神经网络等方法,可以对机床的状态进行预判,这有利于提高机床的使用寿命和工作效率。
管理与优化嵌入式远程控制系统的优点在于它能够进行实时的监控和管理,及时收到机床的传感器数据并进行有针对性的处理。
基于这些数据,机床管理人员可以对机床运行状态进行实时监控,并及时采取措施进行优化,从而保证机床的稳定性和生产效率。
系统的操作界面可以在PC端、手机端等多种设备上进行访问,这有利于在不同的场合场景下进行数据访问。
总结数控机床嵌入式远程测控系统设计和实现,可以解决传统机床所存在的很多不足之处,它具有实时性和远程控制功能,可以实现对于生产过程的实时监控与管理,使得机床的运行状态更加安全、稳定和高效。
基于RT-Linux的嵌入式PLC设计及实现
基于RT-Linux的嵌入式PLC设计及实现
引言在数控机床中, 通常用可编程控制器( PLC) 对机床开关量信号进行控制。
PLC 可靠性高, 使用方便。
但在大多数数控机床, 特别是经济型数控机床中, 要求的输入输出点数并不多, 通常在60 点以下,因此, 为了降低数控机床成本, 在基于工业PC 机的数控系统中, 可以采用开关量I/O 板加外接继电器,配合主机的软件对机床开关进行控制。
但如果PC 机采用单任务操作系统(如DOS) , 数控系统的所有任务运行都置于一个总体的消息循环中, 软件的模块化和可维护性较差, 系统故障的风险相对集中, 而且不能充分利用PC 机系统资源。
而采用非实时多任务操作系统(如Windows) 时, Win32 API 的设计没有考虑到实时环境的开发用途, 其系统调用的效率不高,不能满足数控系统PLC 控制的实时性要求。
为此, 本文提出一种基于RT - Linux 操作系统的嵌入式PLC, 利用RT - Linux 的开放性、模块化和可扩展性的系统结构特性和多线程/多任务的系统环境,在保证实时性的同时, 使故障风险相对分散。
数控系统嵌入式PLC 的硬件结构
数控系统硬件建立在通用工业PC 的开放体系之上, 数控系统嵌入式PLC 硬件包括: 工控机及其外围设备, 基于ISA 总线的开关量输入输出接口卡, 光电隔离模块, 继电器输出模块。
其结构如图1 所示。
工控机采用RedHatLinux810 + RTLinux311 操作系统, 数控系统的人机界面、数控代码处理、轨迹规划、参数管理以及PLC 控制都通过工控机由软件来实现, 不需要独立的PLC 控制器, 减少了数控系统对硬件的依赖, 有利于提高系统的开放性。
基于PLC的嵌入式数控机床控制系统设计

基于PLC的嵌入式数控机床控制系统设计1. 引言1.1 研究背景嵌入式数控机床控制系统是指将数控技术与嵌入式系统相结合,实现对机床运动控制和加工过程的自动化控制。
随着制造业的发展和智能化需求的增加,嵌入式数控机床控制系统在现代制造领域中扮演着越来越重要的角色。
传统的数控机床控制系统受限于硬件成本高、性能受限等问题,而嵌入式数控机床控制系统能够通过PLC技术实现更加稳定、高效的控制,提高生产效率和产品质量。
目前国内对于嵌入式数控机床控制系统的研究仍处于起步阶段,尤其在系统设计和性能测试方面存在一定的不足。
加强对于嵌入式数控机床控制系统的研究和应用具有重要的理论和实际意义。
本研究旨在通过对PLC技术和嵌入式系统的探究,结合数控机床控制系统的设计原理,进行系统硬件和软件设计,并对系统性能进行测试,进一步完善嵌入式数控机床控制系统的设计与应用,提高制造业的智能化水平,推动我国制造业的发展。
1.2 研究目的研究目的是为了探索基于PLC的嵌入式数控机床控制系统设计的方法和技术,以提高数控机床的精度、稳定性和效率,满足不同领域对于加工精度和生产效率的需求。
通过该研究,可以深入理解PLC技术在数控机床控制领域的应用,为工业自动化发展提供新的思路和方向。
通过实际的系统硬件设计、软件设计和性能测试,可以验证相关理论的有效性和可行性,为工程实践应用提供参考和指导。
通过本研究对基于PLC的嵌入式数控机床控制系统的设计和实现,可以为我国工业制造业的发展做出贡献,提升企业的竞争力,促进智能制造的进程,推动工业4.0的实现。
通过本次研究,希望能够为相关领域的研究人员和工程师提供有益的参考和借鉴,促进领域内的技术创新和交流,推动行业的发展和进步。
1.3 研究意义研究嵌入式数控机床控制系统的意义在于探讨如何借助PLC技术来提高数控机床的运行稳定性和加工精度,从而实现机床加工效率的提升。
通过设计合理的控制系统,能够实现对机床运动轨迹、速度、加工参数等的精准控制,从而确保加工零件的质量和精度。
基于嵌入式技术的机床控制系统设计与实现

基于嵌入式技术的机床控制系统设计与实现机床是制造业中常用的设备,而机床控制系统则是机床运行的核心。
基于嵌入式技术的机床控制系统设计与实现是一项重要的技术任务,它涉及到嵌入式软硬件、计算机编程以及机械工程等领域的知识。
嵌入式技术是将计算机系统嵌入到特定设备中,以实现特定的功能。
在机床控制系统中,嵌入式技术的应用可以使机床具备更高的精度、更高的稳定性和更强大的功能。
同时,嵌入式技术还可以实现机床与其他设备的无缝连接,提高生产效率。
在机床控制系统的设计与实现过程中,首先需要进行系统需求分析。
根据机床的种类、工作方式和精度要求,确定控制系统的功能和性能指标。
然后,设计硬件电路,包括主控制板、驱动器、传感器等。
电路设计需要考虑稳定性、可靠性和实时性的要求。
接着,根据需求编写嵌入式软件,进行控制算法的实现和优化。
最后,进行系统集成和调试。
机床控制系统的设计与实现中,关键的一步是嵌入式软件的编写。
嵌入式软件负责控制机床的运动、实时监测机床状态、响应外部指令等功能。
为了实现稳定、可靠和高效的控制,需要采用合适的编程语言和算法。
使用高级语言如C、C++或者嵌入式专用语言如Cortex-M的汇编语言进行编程,可以提高嵌入式软件的可移植性和可维护性。
此外,还需要注意代码的优化,减少资源占用和延迟。
在机床控制系统的设计与实现中,还需要进行硬件设计和电路布局。
硬件设计需要选择合适的电子元器件,并进行电路连接和布线设计。
在设计过程中需要考虑到电路的稳定性和可靠性,尽量减小电磁干扰和功耗。
此外,还需要对电路进行测试和调试,确保其能满足机床控制系统的要求。
系统集成与调试是机床控制系统设计与实现中的最后一步,也是一项关键任务。
在系统集成中,需要将硬件和软件进行整合,并进行各个模块的连接和配置。
接着,进行系统的功能测试和性能测试,检验系统是否满足设计要求。
在系统调试过程中,需要发现和排除问题,并进行优化和改进。
总结而言,基于嵌入式技术的机床控制系统设计与实现是一项综合性的任务,涉及到嵌入式软硬件、计算机编程和机械工程等领域的知识。
基于嵌入式的数控雕刻机控制系统设计

理 器与 F GA相结 合来取 代上述单 片 P
机 与 工 控 机 的 联 机 控 制 ,以 W id ws no
CEn t 作 系统 为 平 台 ,由 AR 完 .e 操 M 成速 度 控 制 ,F GA完 成轨 迹 控制 。 P 在轨迹控制 中结合了步进 电机 的转矩 -
频 率特 性 ,使 电机 的轨迹精 确而且 平
■ 电子科技大学空天科学技术研究院 李 光学 李辉
言
随着科学技术 和制造技 术的不断
底 摆脱 了对 工控机 的依赖 ; 通过控 制
() 理 器 ( RM9 :作 为 控 1处 A )
键 盘设置不 同的脉 冲当量及 电机运 行 制 器 的 处 理 器 , 在 AR 上 移 植 了 M
发 展进 步 ,数字控 制 的雕 刻机 渐渐成 为雕刻 行业 的专用工 具。数控雕 刻机
路中。
图2 系 统软 件 结构 图
软 件 系统
系统的软件 选用 了嵌 入式实时 多 任 务 操 作 系 统 Wid w .e。 根 n o sCEn t
据雕 刻机控制 系统 的需求 ,系统任 务
模块 可 以分 为 : 人机 界面 模块 ,US B 接 口模块和 雕刻控制 模块 。其 中人 机 界面模块包括 L D显示和键盘指令的 C 读取 ; 通过 U B接 口模块读取原始设 S 计数 据 ; 雕刻 控制模 块对读 取的数 据 分析计算后完成速度控制和轨迹控制 。 软件结构 图如图 2所示 。
目前 市场上 的数控雕刻机 控制器
硬 件 平 台所 用 的微处 理器 主要 包括 :
接 口 电路 等 ; 嵌入式 软件 主要包括 启
以 8位 单片机 为 内核 ,这类产 品的价 格 低廉 ,设计 比较简单 ,但是有 功能 单一 、 性能差 、效率低 、 存储容量小 、 独立工 作能 力较弱 、实用性 能不强 、
基于嵌入式技术的数控系统开发设计

第39卷第12期2006年12月天津大学学报Journal of T ianj i n Un iversityV o.l39No.12D ec.2006基于嵌入式技术的数控系统开发设计*王太勇,王涛,杨洁,许爱芬,赵丽,李波,胡世广(天津大学机械工程学院,天津300072)摘要:针对基于PC的数控系统的不足,提出了基于嵌入式微控制器和嵌入式实时操作系统的数控系统开发设计的新方法,旨在增强数控系统运行的稳定性和任务调度的实时性.设计了以M C68F375和M CX314为双CPU架构的硬件开发平台,规划出了基于Vx W o rks的层次化软件结构体系和任务调度运行机制,设计了一种引导型的二次开发平台的理论模型,在此基础上设计出了TDN C M4数控系统的原型机,并将其应用于四轴加工中心TDN C-M40A的设计上,探索出一条数控系统开发设计的新途径.关键词:嵌入式系统;数控系统;微控制器;实时操作系统中图分类号:TP273;TG659文献标志码:A文章编号:0493-2137(2006)12-1509-07Desi gn of CNC Syste m Based on Embedded TechnologyWANG Ta-i yong,WANG Tao,YANG Jie,XU A-i fen,Z HAO L,i LI Bo,HU Sh-i guang (Schoo l o fM echan ical Eng i neer i ng,T ian ji n U niversity,T ian ji n300072,Ch i na)Abstract:A m i ing at the disadvanta ges of CNC syste m based on personal co m puter,a m ethod for the desi gn of co mputerized numerical c ontr o l(CNC)syste m based on e m bedded m icrocontr o ller unit(M CU)and rea-l tm i e operati ng syste m(RTO S)is pr oposed to m i prove the r unning stability and task-dispatc h rea-l tm i e mec ha n is m of CNC syste m.The hardware devel opm e nt platfor m of double-CPU fra me wor k is desi gned w ith M C68F375and M CX314,t he soft ware layer-structure syste m a nd task-dispatc h mec hanis m on the basis of Vx W orks are planned,the theoretical model of a gui d i ng second-develop m ent platfor m is advance d.And the n the CNC sys-te m pr ototype TDNC M4is desi gned,whic h is applied in four-ax ism achi n i ng center TDNC-M40A.K eywords:e mbedded syste m;c o mputerized nu m erical contr o l syste m(CNC syste m);m icr ocontroller;rea-l tm i e operati ng syste m目前,基于PC的开放式数控系统是数控技术开放式架构的主要实现方式,这种实现方式主要是考虑利用工业PC丰富的系统资源和业已标准化的接口来简化数控系统的设计,降低数控系统开发的技术难度,并使设计出的数控系统具有一定的开放性[1)2],但这种体系结构也存在很大的局限性,主要体现为:①系统实时性和稳定性较差,基于PC的数控系统的操作系统多采用通用操作系统,与RTOS相比,其在任务调度的实时性和系统运行的稳定性上都比较差[3];②系统的开放性有限,无论是PC嵌入NC的结构,还是NC 嵌入PC的结构,其开放性特征都是基于PC固有的开放特征,没有针对数控加工的特点而进行单独的定义[4)5];③工控机模式数控系统的成本太高,一台能满足数控加工要求的计算机至少需要投资数千元再配上价格昂贵的运动控制卡,使得成本很难降低[6].另一方面,进入20世纪90年代以来,嵌入式计算机应用技术获得了飞速发展.各种高性能的嵌入式微控制器MC U层出不穷,与以前相比,嵌入式微控制器的CP U运算速度大大提高,处理数据宽度不断加大,更重要的是片上集成资源越来越丰富;与此同时,出现了很多高效率、高可靠性和高稳定性的内核可裁减的嵌入式实时操作系统(RTOS),如Vx W orks、L C/OS-Ⅱ等,这就使嵌入式系统在生活和生产的很多领域都得到了广泛的应用,如汽车工业、宇航工业等.基于以上*收稿日期:2006-02-17;修回日期:2006-08-25.基金项目:国家自然科学基金资助项目(50475117);天津市应用基础研究计划重点项目(05YFJZJ C01800).作者简介:王太勇(1962)),男,博士,教授,t yw ang@t dm e.tj .分析,笔者提出在数控系统的设计中采用嵌入式技术,即基于微控制器的嵌入式数控系统,这种设计方案的优势在于:①市场上可供选择的嵌入式微控制器种类繁多,片上资源丰富,针对不同的应用,其片上集成资源有很大不同,完全可以选择一种片上资源和运算速度都相对非常适合数控系统设计的MCU和DSP来构建数控系统的硬件平台,这种硬件平台的设计可以使系统集成度更高,体积更小,运行更稳定;②数控系统的运行是一个多任务的调度过程,特点是运行任务相对较少,但实时性要求很强,不存在冗余的任务,而采用RTOS作为嵌入式数控系统的操作系统,将使数控系统拥有更好的多任务调度能力和更强的实时性;③嵌入式数控系统的开发是一个从底层硬件到上层软件的独立开发过程,可以针对当今数控系统特点和开放性的特征要求,根据嵌入式系统的特点,来构建适合于嵌入式应用的数控系统开放式架构,与基于PC的数控系统相比,它将有更好的稳定性和开放性.1基于M CU+DS P双CPU架构的硬件平台搭建根据数控系统多任务的运行特征,针对系统任务运行实时性的特殊要求,以及嵌入式系统的特点,文中采用MCU+DSP的双CPU架构来构建嵌入式数控系统的硬件平台.MC U的主要功能是负责运行系统中与管理相关的任务,是系统的主控制CPU;而DSP主要负责运行插补运算等运算量较大、对任务的实时性要求较高的任务,专用于繁重的插补运算,减轻主控制CPU的负担.本数控系统的设计,M C U选用MOTORO-LA公司生产的MC68K系列的M C68F375[7]微控制器,DSP则选用NOVA生产的DSP运动控制专用芯片M CX314[8].1.1嵌入式微控制器MC68F375简介MC68F375是由MOTOROLA公司推出的高速32位微控制器,它具有速度快、并行处理能力强和片上资源丰富等特点,适用于各种控制场合.芯片支持BD M (background debug m ode)模式,通过简易的专用电缆接口,可以直接对微控制器系统进行仿真开发;也可采用全功能的在线仿真器进行实时开发.同时, M C68F375非常适合运行多用户、多任务操作系统,使其更容易做到不死机.MC68F375的片上资源主要包括:系统集成模块(SI M);8KB掉电保护SRAM;8KB掩模RO M;10位队列式的模数转换器(QADC64),16路A/D转换模块具有强大的数模转换控制功能;队列式串行通信模块(QSMC M),可以方便地实现同步、异步通信功能;可构造时钟模块(C TM4),具有多种强大的定时、计数和脉冲调制功能;时间处理单元(TPU),分辨率高达250 ns,可对各种事件进行快速的智能处理,同时集成P WM算法及各种输入捕捉算法;CAN控制模块(Tou-C AN),能方便地实现工业自动化等场合的现场总线控制[7].1.2DSP专用运动控制芯片MCX314简介MCX314是NOVA电子有限公司研制的DSP运动控制专用芯片,性能优良,接口简单,编程方便,工作可靠,可广泛用于数控机床及机器人等领域的运动控制.芯片能与8位或16位数据总线接口,通过命令、数据和状态等寄存器实现4轴3联动的位置、速度、加速度等的运动控制和实时监控,实现直线、圆弧和位元3种模式的轨迹插补,输出脉冲频率最高达4MH z.每轴都有伺服反馈输入端、4个输入点和8个输出点,能独立设置为恒速、线性或S曲线加/减速控制方式,并有2个32位的逻辑、实际位置计数器和状态比较寄存器,实现位置的闭环控制[8].与通用DSP相比,MCX314更适合数控系统的设计,是一种专用的运动控制芯片,主要表现在3方面:①插补算法(三轴直线、平面圆弧和位模式插补)、运动控制和位置控制主要由硬件来实现,主控制CPU通过接口对MCX314进行相应的工作方式、速度和加速度的设置,然后将运动的起点和终点传送给MCX314,之后不再需要主控制CPU的干预就能自动完成从起点到终点的插补运动控制,减少了运行过程中与主控制CP U频繁的数据交换,也减少了相应软件的设计,缩短数控系统的开发研制周期,且能提高系统的运行速度;②片上集成有专用于运动控制的I/O接口,如硬件限位、急停等,可简化数控系统的硬件设计,提高系统运行的稳定性;③与主控制CP U之间的通讯简单,易于协调,对主控制CPU来说,M CX314更像是一个外围功能芯片,通过设置一定的地址和读写控制字就能实现对MCX314的控制.1.3嵌入式数控系统硬件平台的搭建图1为本文研究的嵌入式数控系统硬件平台模块图,以M C68F375和M C X314为硬件平台的核心,根据数控系统的功能特点和工作特性要求,分别扩展了如下多种功能模块.(1)扩展FLAS H模块,MC68F375片上集成有8K 字节的掩模ROM,但这对于数控系统的运行是远远不够的,必须进行片外扩展.在系统设计中,主要是在片外扩展了2片512K字节的FLAS H,主要用于存储系统运行所需的程序代码,语言字库,需要断电和长期保存的系统参数、刀具参数、补偿参数、机床参数以及#1510#天津大学学报第39卷第12期图1嵌入式数控系统硬件平台模块F ig.1H ardware p latfor m m odu le of embedded CNC syste m数控加工程序等.(2)扩展RAM模块,虽然M C68F375片上集成有8K字节的SRAM,但由于数控系统不同于小型的嵌入式系统,在运行过程中需要有充足的RAM空间,特别是由于运算和RTOS的多任务调度以及文件系统的运行都将产生大量的堆栈、全局变量和局部变量,而且由于系统内置软PLC(PLC的内部继电器R、定时器T和计数器C)的运行也将占用一部分RAM空间,因此在数控系统设计时,在片外扩展了2片512K字节的静态高速RAM,用于扩展RAM空间,增强系统的运行效率和实时性.(3)时钟控制模块,也就是日历系统,需要在系统断电时能够长时间的保持日历的工作状态.当系统工作时,进行到文件相关操作时,如在数据传输或用户在对系统进行编程、二次开发时,都需要数据以文件的形式进行存储或传输,需要记录下文件编写的日期,以便文件系统的管理.(4)LCD控制模块,主要用于完成液晶显示的控制刷新和与CPU32的数据交换,将机床的当前状态、系统信息、坐标信息、参数信息和图形仿真信息等通过LCD向用户显示出来,属人机交互的一部分.(5)键盘控制模块,它是数控系统交互的重要环节,键盘扩展电路有多种实现方式,设计采用CPLD来实现专用键盘接口芯片的设计方案,这种设计方案,既保证了设计的通用性和灵活性,同时所有的键值判断等可通过CPLD编程来实现,最大限度节省了M C68F375的资源.(6)数据采集模块,当今的数控系统越来越重视对现场加工条件和机床工作状态的实时监控和诊断[9],本系统数据采集模块设计主要是基于M C68F375片上集成的16路QADC,外加抗混滤波单元和信号调理单元.(7)主轴控制模块,由D/A控制芯片和编码器反馈高速输入口组成,能够完成对单极性和双极性模拟变频主轴的控制.(8)网络通讯模块,为了适应数控系统网络化的发展趋势[10]和数控机床远程控制和远程诊断的发展需要,设计采用R ea ltek公司的10M bps网络通讯芯片RTL8019进行系统网络接口模块的设计,为机床的网络化提供了硬件基础.(9)CAN总线接口,主要由C AN总线收发器和光藕元件组成,与MC68F375片上集成的TouC AN模块一起构成数控系统CAN总线通讯功能的硬件基础.(10)BDM调试接口,用于数控系统的开发调试阶段,在上位计算机上,开发人员通过B DM可方便地对数控系统进行开发调试.(11)COM串行接口,主要利用M C68F375片上集成的QS M的SC I子模块,外加芯片驱动电路(如MAX238等),构成数控系统与个人计算机之间串行通讯的硬件基础.(12)I/O接口,主要完成内置PLC对外部机床电气的控制,电机控制输出和其他功能模块的对外输出,由驱动元件、继电器元件和光耦隔离元件等组成.通过上面对嵌入式数控系统硬件框架的搭建和各个硬件功能模块的分析可知,本文设计的嵌入式数控系统除保留了传统数控系统的功能外,特别加入了数据采集模块、网络通讯模块和CAN总线通讯模块,通过这3个模块,设计出的数控系统能很方便地实现与现场其他设备的总线连接和网络通讯,更易于实现数控设备的远程诊断、监控以及网络化和数字化制造.2基于RTOS的嵌入式数控系统软件平台的研究以前的数控系统的软件结构设计通常通过一个无限循环来判断任务的标志量,通过中断(定时中断和键盘中断)来激活新的任务,进入固定的任务中断程#1511#2006年12月王太勇等:基于嵌入式技术的数控系统开发设计序入口,来实现任务的调度.在这种单任务且无任务运行环境调度方式下,系统的大多数时间被任务等待的无限循环占据了,在任务处理的过程中,其他的同等级的任务无法使用CP U 的资源,无法进行任务之间有效的上下文切换,导致了系统的实时性十分不可靠.同时,如果任务在执行过程中需要等待信号,或延时信号处理,当这种延时不可预计的情况下,就可能占据大量的系统时间,就会造成对系统资源的大量浪费,导致无法响应更紧急的任务,这种无限的等待情况会导致许多不可预计的后果.针对单任务系统的软件架构的不足,本设计在数控系统软件构建中引入基于Vx W o r ks 嵌入式实时多任务操作系统(RTOS )作为系统的任务调度基础.2.1 嵌入式实时操作系统Vx W orks 特点简介Vx W orks 操作系统是美国W indR iver 公司设计开发的一种嵌入式实时操作系统(RTOS)[11)12].系统具有如下特点:①内核可裁剪,具有极好的伸缩性;②成熟高效的任务调度机制,支持优先级和时间片轮番调度法;③任务间通讯手段灵活快速,支持信号量、消息队列和互斥等多种通信方式;④丰富的板级支持软件包(BSP),缩短了系统开发周期,减少了开发的工作量;⑤强大的网络开发支持,简化了网络开发的工作,系统集成TCP /I P 协议的支持;⑥支持多种文件系统;⑦具有集成开发环境TORNADO 的支持,界面友好,能够对系统的任务调度和占用的时间片进行实时监控,提高系统的利用率,充分发挥系统性能;⑧功能可扩展,根据千变万化的嵌入式应用,除提供基本的内核功能外,还可以根据需要加入功耗控制、嵌入式文件系统、嵌入式GU I 系统和嵌入式数据库,用户也可以根据自己的需要利用Vx W orks 的功能扩展接口,开发出自己的功能;⑨内核可剥夺性,即当前系统总是运行就绪状态下优先级最高的任务.2.2 基于Vx W orks 的嵌入式数控系统层次化软件体系结构设计 本文设计的嵌入式数控系统的层次化软件体系结构如图2所示,它由以下3部分组成.(1)底层硬件驱动层.硬件驱动程序的主要功能是为上层软件提供良好的函数调用接口,完成对系统硬件资源的抽象,屏蔽掉底层的硬件细节.通过抽象底层硬件的物理行为,使上层用户实现对硬件功能的调用.硬件驱动程序单独分层的编程思想为系统的升级提供了良好的条件,当系统硬件设计发生变化时,上层软件不用做过多的修改,仍可以通过原有的接口实现硬件的调用,只需要修改底层驱动就可以了.另外,硬件驱动程序的提出能够方便项目开发,软硬件协同进行设计.(2)实时操作系统层.设计采用了实时性操作系统Vx W orks 作为系统任务调度与开发平台,本层的主要功能是处理由外部或内部事件引发的中断、设备驱动层的激活以及执行任务的调度.(3)系统应用层.它是在Vx W orks 的基础上,通过对Vx W orks 的接口函数的系统调用,实现系统的具体的应用功能,如交互模块、控制模块等.在本设计中,各种任务以应用程序的形式集合在应用层,服务于不同的功能模块.Vx W roks 根据每个任务的要求,进行资源管理,对MC68F375、M CX314、存储器和外设的资源进行合理分配,实现消息管理、任务调度和异常处理等工作.在Vx W orks 的支持下,每个任务都被分配一个优先级,根据优先级别的高低,动态切换各个任务,以保证实时性要求.图2 基于Vx W orks 的嵌入式数控系统软件体系结构Fig .2 Software arch itecture of e mb edded CNC system based on Vx W orks#1512#天 津 大 学 学 报 第39卷 第12期可以看出,设计采用分层型模块化软件结构和实时性操作系统相结合的软件设计方案,这种设计方法的优势在于可以实现软硬件设计的并行开发,Vx -W or ks 作为系统的硬件驱动层与应用层之间的桥梁,使应用层的函数调用完全屏蔽掉了硬件细节,层与层之间只需要通过定义好的接口函数进行通讯,使得上层的软件开发不必顾虑硬件设计.这种软件设计模式,实际上是软硬件交叉进行、并行设计的过程,在设计的开始阶段,通过软硬件的协商,定义系统的总体设计方案,一旦系统的体系结构设计完成,软硬件设计就可以独立进行了.等软硬件设计完成后,再集成一体进行集成测试,使系统的开发周期缩短到最小,极大地提高了嵌入式系统的开发效率.2.3 基于Vx W orks 的数控系统多任务调度机制的实现2.3.1 数控系统中任务的划分数控系统是一个专用性很强的多任务调度运行系统,按照任务运行实时性强弱的划分方法,一般将数控系统的任务划分为管理任务和控制任务2大类.如图3所示,其中控制类任务的工作与数控加工直接相连,对实时性要求高,而管理类任务的工作对实时性的要求相对较低.系统的控制任务又可细分为位置控制、轨迹插补、指令译码、I /O 控制、误差控制、状态实时监控与故障诊断等子任务;系统的管理任务则包括人机交互管理、显示管理、数据管理、通信管理和网络管理等子任务.而且,在实际的开发设计中可根据需要对各个子任务进行进一步细分,形成一个任务集合,任务集合中的任务都必须根据外部事件及时被激活运行,同时结合具体的加工情况,由V x W orks 统一调度,动态地对任务进行优先级控制,以适应不同加工任务的要求.当有高优先级的任务进入任务列表时,内核通过优先级抢占调度方式切换到高优先级的任务;当同等优先级的多个任务进入任务列表时,内核通过时间片轮转调度法实现多任务的并发控制.图3 数控系统中任务的划分F ig .3 T as k division of CNC syste m2.3.2 数控系统中多任务调度机制的实现图3中划分出的数控系统任务由Vx W o r ks 进行统一调度,由前面分析可知Vx W orks 支持优先级和时间片轮番调度法,现将图3中的控制任务按照优先级由高到低的顺序排列如下:位置控制、轨迹插补、误差控制、I /O 控制、指令译码、实时监控、故障诊断;而管理任务的优先级要比控制任务的优先级都低,系统设计中对管理任务的5个子任务采用时间片轮番调度法,即它们拥有相同的优先级,任务调度的示意如图4所示.在系统完成初始化后自动进入时间分配环中,在环中依次轮流处理各项管理任务.在环中轮流处理各项管理任务时,只要当前时间片结束,不论当前任务是否完成,都要暂时释放CP U,把CPU 让给另一个就绪的任务,直到再次轮到该任务的时间片时,再重新占用CPU,自动跳转到断点处继续执行.而对于系统中的实时性强于管理任务的控制任务则按优先级排队,分别分配不同的优先级,由于环外的任务优先级均高于管理任务,环外的任务可以随时通过优先级抢占的任务调度方式中断环内的任务执行,占用系统资源.当有多个同等级的任务进入任务就绪队列时(如零件加工时多轴的位置控制任务),根据时间片轮转调度方式形成新的当前任务调度环,保证同优先级的任务并发进行.同理,这种任务的抢占和调度机制也适用于其他不同优先级的任务.3 数控系统引导型二次开发平台理论模型的研究数控系统二次开发功能的强弱在一定程度上代表了其开放性的好坏,根据嵌入式系统的结构模式、设计特点和数控系统的功能特征,本文设计了一种适合嵌入式数控系统、具有引导功能的数控系统二次开发平台的理论模型,如图5所示.二次开发平台采用一种引导开发的模式,借助于预先定义的各种信息库,将使用特殊语言描述的用户功能要求转换成信息库中特定策略的组合,然后通过与M C U 相匹配的代码编译器,将策略描述翻译并通过计算机的并口经由下载电缆传送至数控系统的仿真开发接口.二次开发环境包括语言描述和引导设置2种开发方式.语言描述方式采用结构化的功能机制,预先定义出系统扩展的算法结构,用户只需根据算法的提示加入自己功能要求的描述.二次开发平台提供独立的结构化描述语言,采用面向对象的编程思想,以功能对象群组的构成方式来完整描述数控组件对象的特定工作#1513# 2006年12月 王太勇等:基于嵌入式技术的数控系统开发设计图4基于Vx W ork s的数控系统任务调度机制示意F ig.4T as k-dispatch m echan is m of CNC syste m based on Vx W ork s状态.语言描述方案,可以通过灵活定义的算法规范深入系统内部的软件构成细节,适用于系统底层策略方案的自定义配置.引导设置采用开发向导的形式以图形化询问界面来定制用户的扩展需求,一般用于较为简单的扩展开发.图5二次开发平台的理论模型F i g.5Th eoreticalm ode l of second-d evelopm en t p latform 4数控系统的设计实现成功搭建出了以MC68F375+M CX314为基础的硬件开发平台,规划出了以嵌入式实时操作系统(RTOS)Vx W orks为核心的层次化系统软件体系结构和任务调度机制,开发出了TDNC M4数控系统原型机,该系统能用于控制车床、钻铣床,可控制4个进给轴和1个模拟主轴三轴联动,具有直线插补和平面圆弧插补、螺旋线插补和空间圆弧(C I P)插补等控制方式,能进行螺纹加工、变距螺纹加工等,可通过Internet 进行数据传输和网络化制造,并将该系统应用于TDNC-M40A四轴加工中心的设计上,如图6所示.经实验证明,该数控机床工作稳定,性能可靠,主轴转速最高可达6000r/m i n,切削进给X、Y、Z可达0~10000mm/m i n,定位精度X、Y、Z可达?0.005 mm,重复定位精度X、Y、Z可达?0.003mm,目前已被应用于天津大学数字化制造与测控技术研究所的一般金属切削加工和工业陶瓷加工的实验.图6TDNC-M40A四轴加工中心F ig.6Four-axis m ach i n i ng cen ter TDNC-M40A#1514#天津大学学报第39卷第12期5结语本系统设计的最大特点是将嵌入式技术应用到数控系统的设计中来,针对基于PC的数控系统在稳定性、实时性等方面的不足,提出利用控制性能更加稳定和优异的MCU以及运算性能更加强大的专用DSP芯片,为双CP U架构构建嵌入式数控系统的硬件平台,利用性能优异的嵌入式实时操作系统Vx W o r ks作为数控系统的操作系统来统一调度系统运行的各个任务,使系统拥有了更佳的实时性和稳定性,初步研究了数控系统引导型二次开发平台的理论模型,开发设计出TDNC M4数控系统的原型机,探索出了一条数控技术研究和开发的新渠道)))嵌入式数控技术.参考文献:[1]Zhang Chengru,i W ang H eng,W ang Ji ngkun.A U SB-basedsoft w are CNC syste m[J].J ournal of M aterials ProcessingT echno logy,2003,139(1/3):286)290.[2]V itt ur i S.PC-based auto m ati on syste m s:A n exa m ple o f ap-p licati on for the rea-l ti m e contro l o f b l ow m achines[J].Computer S t andard s and In terfaces,2004,26(2):145)155.[3]韩青.RTOS的必备特性[J].单片机与嵌入式系统应用,2004(2):85)86.H an Q i ng.T he spec ifi c property of RTOS[J].M icrocon-troller and Em bedded Sy ste m,2004(2):85)86(i n Ch-inese).[4]R ober Stephen J,Sh i n Y ung C.M odeli ng and contro l ofCNC m ach i nes us i ng a PC-based open arch itecture contro ller[J].M echatron ics,1995,5(4):401)420.[5]李宏伟.基于M C68332的嵌入式数控系统开发平台的研究[D].天津:天津大学机械工程学院,2003.L iH ongw e.i R esearch on Deve l op i ng P latfo r m for E m beddedCNC Syste m Based onM C68332M CU[D].T ian jin:Schoo l o f M echan i ca l Eng i neer i ng,T ian jin U n i ve rsity,2003(inChi nese).[6]李宏伟,王太勇,薛国光,等.基于嵌入式微控制器核心和层次化网络监控机制的开放结构数控系统的构建[J].振动与冲击,2003,22(1):47)49.L iH ongw e,i W ang T a i yong,X ue G uoguang,et a.l O pen a r-ch itect ure CNC based on embedded M C U and mu lt-i layernet wo rk s uperv isi on[J].J ournal of Vibrati on and Shock,2003,22(1):47)49(in Chi nese).[7]M o toro la Inc.M C68F375U ser.sM anual[Z].1998.[8]叶佩青,汪劲松.M CX314运动控制芯片与数控系统设计[M].北京:北京航空航天大学出版社,2002.Y e Pe iqi ng,W ang Jinsong.T he M o tion C ontro l Chi pM C X314and t he D esi gn of CNC[M].Be iji ng:Be iji ng U n-ive rsity o f A eronautics and A stronau ti cs P ress,2002(i n Ch-inese).[9]Cus F,M ilfe l nerM,Balic J.A n intelligent sy stem f o r mon-itor i ng and opti m iza ti on o f ba l-l end m illi ng process[J].J ournal of M a terials P rocessing T echnology,2006,175(1/3):90)97.[10]W ang L i hu,i O rban Pete r,Cunni ngham A ndrew,et a.l R e-m ote rea-l ti m e CNC m achi n i ng for w eb-based m anufactur i ng[J].R obo tics and Computer-Integrate d M anufact ur i ng,2004,20(6):563)571.[11]B i shop D,W aters G,D ale D,et a.l D eve l op m ent o f an au-tono m ous32-b it i nte lli g ent dev ice con tro ll er[J].N uclear In-stru m ents and M ethods in Phy sics R esearch A,1994,352(1/2):236)238.[12]K i m D aeyoung,Lee Y annhang,Y ounis M ohan m ed.So f-tw are arch itecture s upporti ng i ntegrated rea-l ti m e syste m s[J].T he J ournal of Sy ste m s and Sof t w are,2003,65(1):71)86.#1515#2006年12月王太勇等:基于嵌入式技术的数控系统开发设计。
基于PLC的嵌入式数控机床控制系统设计
基于PLC的嵌入式数控机床控制系统设计【摘要】本文主要介绍了基于PLC的嵌入式数控机床控制系统设计。
首先介绍了PLC技术在数控机床中的应用和其特点和优势,然后讨论了嵌入式系统在数控机床中的应用以及嵌入式系统与PLC结合带来的优势。
最后详细描述了基于PLC的嵌入式数控机床控制系统的设计过程。
在结论部分对设计成果进行评价,指出存在的问题并展望未来的研究方向,同时探讨了研究成果在实际应用中的前景。
通过本文的研究,可以为数控机床控制系统的设计和优化提供参考,推动相关领域的发展和应用。
【关键词】基于PLC、嵌入式、数控机床、控制系统设计、技术应用、特点、优势、结合、设计成果、问题、展望、应用前景1. 引言1.1 研究背景数统计、格式要求等。
谢谢!数控机床作为现代制造业的核心设备之一,在工业生产中起着至关重要的作用。
传统的数控机床控制系统一般采用PC或专用控制器,但由于PC系统的稳定性与可靠性较差,专用控制器的功能又较为有限,因此在实际应用中存在着一些不足之处。
随着工业自动化水平的不断提高,PLC技术逐渐成为数控机床控制系统的首选。
PLC具有抗干扰能力强、稳定性高、可靠性好等优点,能够满足数控机床在高速、高精度、多功能化等方面的要求。
随着嵌入式技术的不断发展,嵌入式系统在数控机床中的应用也日益广泛。
嵌入式系统具有体积小、功耗低、性能卓越等特点,能够实现对数控机床整体性能和稳定性的提升。
基于PLC的嵌入式数控机床控制系统设计具有重要的理论指导意义和实际应用价值,对于提高数控机床的工作效率和生产质量具有重要意义。
1.2 研究意义数控机床作为制造业的重要装备之一,在提高生产效率、保障产品质量、降低生产成本等方面发挥着重要作用。
而嵌入式数控机床控制系统则是数控技术的重要发展方向,能够实现对机床动作的高精度控制和复杂加工任务的智能化处理。
在这样的背景下,基于PLC的嵌入式数控机床控制系统设计成为当前研究的热点之一。
研究基于PLC的嵌入式数控机床控制系统设计,不仅可以促进数控技术的发展和应用,提高数控机床的自动化程度和智能化水平,还可以推动制造业的转型升级,提高我国制造业的核心竞争力。
基于ARM9的嵌入式数控铣床控制系统的设计

关键词 : 嵌入 式 ; 数控铣 床 ; R Ln x ¥ C 4 0 A M;iu ;3 2 1 X
摘 要 : 统数控 系统硬件 大 多基 于 通 用计 算 机 或 工业 控 制 计 算机 之 上 , 件 基 于 Widw 平 传 软 no s 台。软硬 件成 本 高、 功耗 大、 资源 浪 费。 文章 给 出 了一 种基 于 Lnx操 作 系统 , A M9微 处理 器 iu 以 R 为硬 件 平 台, 向动 力驱动 装置 , 即伺服 电机和 步进 电机 驱动 器提 供 控 制 信 号 , 制铣 刀 的旋 转和 走 控
YANG , Li LIZhe g m ig, U o s n n — n LI Ba —e
(in s n e i ,in s hnin 10 3 hn ) J guU i rt JaguZ e a g22 1 ,C ia a v sy j
Absr c : o t c n e t n lCNC t a t M s o v n i a o mi i g ma hie do t te h r wa e u ual s d o e e a l n c n s a p h a d r s l ba e n a g n r l l y c mpue ra n u t a o to o utra d tk ss f r i d wsa o t r l t r . h i o t o tro n i d sr lc nr lc mp e n a e ot i wa e W n o sa s fwa e p af m T e rc s o a d p we ispain a e v r ih,h s c u ig mo tr s u c st se 、 i p rp e e ta m— n o rd s i t r ey h g t u a sn s e o r e o be wa td Th spa e r s n n e o
数控机床项目设计方案
数控机床项目设计方案一、项目概述数控机床是一种通过计算机控制工作过程的机床,采用数控系统可以实现复杂的加工操作。
本项目旨在设计一种高效、精确、易操作的数控机床,以满足市场对高品质加工设备的需求。
二、项目目标1.设计一种具有高精度的自动数控系统,可以实现多种工艺的加工操作。
2.提高机床的工作效率,减少加工时间。
3.提供用户友好的操作界面和操作指南,使操作过程简单易懂。
4.设计机床具有较高的稳定性和寿命,降低维修和更换部件的成本。
三、项目内容1.数控系统设计:设计一种基于嵌入式技术的数控系统,包括硬件和软件。
硬件包括控制模块、传感器、驱动器等,软件包括人机界面软件、运动控制软件等。
2.加工平台设计:设计适用于不同加工工艺的加工平台,采用高强度、高刚性的材料制造,以保证加工的稳定性和精度。
3.自动换刀系统设计:设计一种自动换刀系统,可以在多种工艺之间快速切换,并确保刀具的位置和角度的高精度。
4.加工工艺优化:通过对加工过程进行模拟与仿真,优化加工路径,减少加工时间,提高加工精度。
5.安全保障设计:设计机床的安全保护措施,包括急停装置、防护罩、自动报警系统等,确保操作人员在使用过程中的安全。
四、项目进度安排1.数控系统设计与开发:预计耗时3个月。
2.加工平台设计与制造:预计耗时2个月。
3.自动换刀系统设计与制造:预计耗时1个月。
4.加工工艺优化研究:预计耗时3个月。
5.安全保障设计与装置:预计耗时1个月。
6.整机测试与调试:预计耗时1个月。
7.项目总结与验收:预计耗时1个月。
五、项目预算和投资回收1.项目预算:本项目的总预算为500万人民币,具体用于材料采购、设备购置、研发费用等方面。
2.投资回收:预计项目投资回收周期为3年,在投入运营后每年可获得200万人民币的净利润。
六、项目风险与解决方案2.市场风险:市场需求波动和竞争加剧可能影响项目的销售情况。
解决方案是进行市场调研,了解市场需求和竞争情况,并加强市场推广和营销策略。
嵌入式数控内圆磨床软PLC的设计与实现
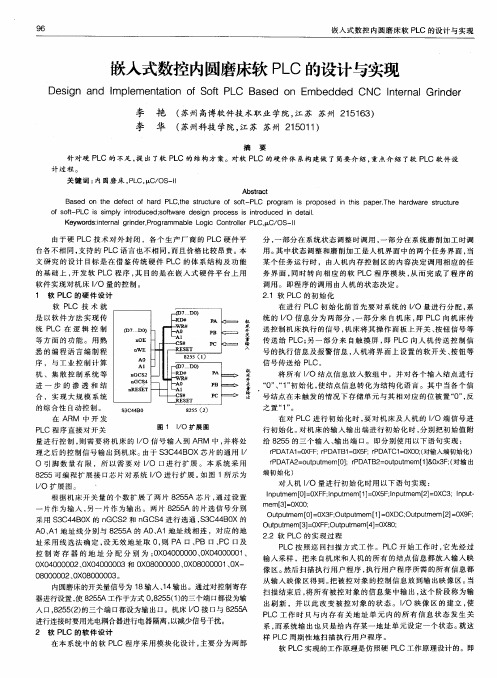
嵌入式数控 内圆磨床软 P C的设计与实现 L
De i n I e n a in o f PL B s d o E sgn a d mplme t t fSot o C a e n mb d e e d d CNC It r a id r n e n lGr e n
rD T 1 0 F r D T 1 0 5 ;rD T = X 0( 输入 端初 始化 ) P A A = ×F : P A B = X F P A C1 0 0 ; 对
量 进 行 控 制 , 需 要 将 机 床 的 I 信 号 输 入 到 AR 中 , 将 处 则 / O M 并
关键 词 : 圆磨床 , L  ̄ / —l 内 P C, C OS 1
Absr t tac
Ba ed n h de e t f ar PL t e tu t r o of—PL s o te f c o h d C, sr c ue f s t h C pr am i pr os d n hi p ogr s op e i t s ape . e rTh ha d r war sr c ue e tu t r ofs f-PL s si pl nr du d:O t r de i pr e s i it ot C i m y itO ce s fwa e sgn oc s s nr odu d n et l ce i d ai
软 件 实现 对 机 床 I 量 的控 制 。 / O
1 软 PL 的 硬 件 设 计 C 软 P C 技 术 就 L
广-
用 。 中状 态 调 整 和 磨 削 加 工 是人 机界 面 中 的两 个 任 务界 面 , 其 当 某个 任 务 运 行 时 , 由人 机 内存 控 制 区 的 内容 决 定 调 用 相 应 的 任 务 界 面 , 时 转 向 相 应 的软 P C 程 序 模 块 , 而 完 成 了程 序 的 同 L 从
嵌入式数控机床的设计与实现
嵌入式数控机床的设计与实现嵌入式数控机床是一种新型的数控机床,它采用嵌入式系统作为控制器,具有体积小、功能强大、灵活性高等优点。
在制造业中应用十分广泛,尤其是对小批量、多品种的生产具有很大的优势。
在本文中,我们将详细介绍嵌入式数控机床的设计和实现过程。
一、设计嵌入式数控机床的设计过程可以分为以下几个步骤:1. 系统需求分析在设计嵌入式数控机床之前,首先要进行系统需求分析。
这一步骤是非常重要的,它能够帮助我们明确机床的功能和性能要求。
2. 系统架构设计在进行系统架构设计时,需要考虑到机床的整体结构、控制算法和传感器等硬件设备的选择。
同时需要将软件和硬件相结合,从而使机床具有良好的控制性能和优良的稳定性。
3. 电气设计在电气设计过程中,要将各种传感器链接到嵌入式系统中,同时要将各个执行器控制器,例如电机和伺服系统等与系统进行连接。
在这一步骤中也要考虑电路板的设计、元器件的选择,还要进行各种仿真和测试。
4. 嵌入式软件开发在嵌入式软件开发中,需要选择适合的程序语言,实现数控算法和加工控制代码,同时还要设计图形化界面和通信模块等。
这个步骤的实现需要对编程语言和各种开发工具有深入的了解。
5. 硬件调试和软件测试硬件调试和软件测试是设计过程中非常重要的一步。
在这一步骤中,需要通过整体测试和单元测试,对系统进行全面的检查和调试。
可以用逻辑分析仪,示波器等工具进行硬件调试。
在软件测试中,需要使用各种测试工具来模拟各种情况,确保系统完全符合需求。
二、实现实现嵌入式数控机床需要以下步骤:1. 选择硬件平台嵌入式数控机床需要选择合适的硬件平台,通常采用ARM和FPGA等嵌入式系统。
在选择平台时,需要考虑到处理器速度、内存容量、接口类型等因素。
2. 编写嵌入式软件选择好硬件平台之后,就需要编写嵌入式软件了。
编写软件需要选择合适的编程语言,并进行代码编写、编译、调试和优化等步骤。
在编写软件时,需要考虑到硬件的特性和软件的实现,从而使机床具有良好的控制性能。
基于ARM嵌入式技术的数控机床控制系统的研究
图 3 系统 软 件 结 构 图
1 执行控制系统 . 2
执行 控 制 系统主 要是 接收 嵌入 式 开发 平 台发送 的 坐标 数 据 , 制相 应 电机 运行 及 执 行 其 他相 应 的 控
2 搭建交叉编译环境 . 1
交叉 开发 环境 ( rs D vlp n n i n e t C os e e me t v o m n) o E r
Mii U 实现 图形 用户界 面操 作并对整机进行控 制, nG I 并建立 了数控 系统的调试环境 , 对开发 的系统软硬 件进行 联机调试 、 件测试和 实例 加工。 软 测试和实例加工结果表 明, 基于 A M 和嵌入式 Ln x的数控机床控 制系统技 R iu
术方案是可行 的, 实现 了预 期的功能。
全 独立 于 内核 , 本上 由 目录 、hl 库 、 基 Sel 脚本 4个 部 、 分 组成 ; 用户 应用 程序 就 是 由用 户 自己开发 , 交叉 编 译 后 能够 在 A RM板 运 行 的程 序 。 完 整 的结构 , 其 如
图 3所示 。
系统应用程序
文 件 系统
时控 制和数据通 信 。 主要工作 如下 。 一 , 过 其 第 通 U B接 口读取数控编程源文件 。 S 第二 , 对源文件 中 的指令进行解释处理 , 得到原始的机床控制数据 ; 然
『 键 词 ] M; 关 AR 嵌入 式 系统 ;iu ; Lnx 数控 系 统 【 图 分 类 号 IP 1 . 中 T 3 15 2 【 献 标 识 码 】 文 A 【 章 编 号 10 9 3 2 【 0 2 0 - 0 4 0 文 1 0 — 6 12 1 )1 0 9 - 4
基于嵌入式平台数控系统的研究与设计

文章 编 号 : 0 6 2 9 2 0 ) 2 0 0 —0 1 0 —3 6 ( 0 6 0 — 0 5 4
基于嵌入式平台数控系统的研究 与设计
李超 彪 ,王 兴松
( 南大学 机械工程学 院, 京 东 南 20 9 ) 1 06
摘 要 : 提 出一 种 以 嵌 入 式 CP L 1 U( P2 XX) 运 动 及 控 制 器为 数 控 系 统 硬 件 平 台 , 嵌 入 式 工 业 总 线 P 0 以 C1 4为
为保证 数控 系统 在较苛 刻 的工业环 境下稳 定运
Gr u e h o o y & Pr d c i n M o e n z to Vo . , . 2 0 o pT c n lg o u to d r i a i n 1 2 No 2, 0 6 3
维普资讯
但却 难 以保证 数控 系统 的实 时性 、 定性 及高 速 、 稳 高
精度 控制 . 由于运算 能 力 差 、 行 处 理 能力 弱 、 能 并 功 少, 利用单 片机 来完 成 运 动 控 制 的 系统 已不 能满 足 加工 的 要 求. 着 L I 术 与 软 件 技 术 的不 断 发 随 S技 展, P 非 C模 式 的 数 控 系 统 已从 简单 的基 于单 片 机 的数 控系 统发 展到 以嵌入 式软 硬件 为平 台 的专业 数 控系 统. 与过去 的非 P C模 式数 控 系统 相 比 , 于嵌 基 入式 软硬件 技 术 的数 控 系统在 具备 优秀 的实 时性 与
入 2 O世纪 9 代 以来 , 向开 放 式设 计 已成 为数 O年 面
控 技术 发展 的主要 特 征 , 目的是 大 幅度 降 低 系 统开 发 、 造与 维护费 用 . 构 随着 D P 可 编程 逻 辑 器件 与 S、 E DA等 器件 与设计 手段 的进 步 , 数控 系统 的核心 将 运 动控 制功 能模块 化 、 成 化 已成 为 开放 式 数 控 的 集 特征之 一. 运动控制 的实现不 再 由主控 板负 责 , 而由 专 用 的运动 控制 卡负 责 , 样 既 可 保证 加 工 效 率 与 这 质量 也可减 轻 主控 板 C U 的负担 . P
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编号:SY-AQ-09639
( 安全管理)
单位:_____________________
审批:_____________________
日期:_____________________
WORD文档/ A4打印/ 可编辑
嵌入式数控机床的设计与实现Design and implementation of Embedded CNC machine tool
嵌入式数控机床的设计与实现
导语:进行安全管理的目的是预防、消灭事故,防止或消除事故伤害,保护劳动者的安全与健康。
在安全管理的四项主要内容中,虽然都是为了达到安全管理的目的,但是对生产因素状态的控制,与安全管理目的关系更直接,显得更为突出。
数控技术是各种先进制造技术的奠基石,是一个国家先进制造
技术发展的重要基础,也是制造业信息化的重要保证。
在科学技术
发展的带动下,数控技术已经随着制造业的发展,成为衡量一个国
家工业现代化的重要标志。
本文结合数控技术的发展以及嵌入式数
控系统的研究,对嵌入式数控机床的进行了设计和实现。
随着经济的发展,制造业逐渐成为影响国民经济的主要行业,
而制造技术的先进性则成为衡量一个国家现代化水平的重要标志。
作为各种先进制造技术的基础,数控技术的发展对于社会的发展和
稳定起着越来越重要的作用。
但是,就目前来看,我国传统的数控
机床还存在诸多的问题,与发达国家相比存在着较大的差距,需要
对相应的技术进行更新,切实提高数控机床的技术水平。
数控机床的发展
数控机床,是对数值控制机床的简称,指一种装有程序控制系
统的自动化机床。
其中,数控装置、检测装置以及机床主体是构成数控机床的三个主要部分。
数控机床发展历程与计算机和微电子技术的发展是密不可分的,主要包括以下4个发展阶段:硬件数控、计算机数控、高精度CNC以及开放式CNC。
在当前的发展形势下,嵌入式系统的应用使得数控机床有了新的发展。
嵌入式数控系统概述
2.1.嵌入式系统
嵌入式系统,主要是指以计算机技术为基础,以功能应用为中心,可以对软件和硬件进行裁剪的专用计算机系统优化,具有功能齐全、能耗小、体积小、成本低、可靠性高等特点,在多个领域都得到了广泛应用。
2.2.嵌入式系统开发数控系统的优势
以当前嵌入式Linux系统为基础,对数控系统进行开发,其主要优点如下:
①嵌入式Linux操作系统的源代码具有开放性的特点,适合开
放式数控系统的开发,同时便于更好地对数控系统进行配置和修改,设计出真正意义上“开放”的数控系统;
②系统适用范围广,对于硬件资源的依赖性较小;
③Linux自身功能模块化的特点,使得数控系统可以随时添加新的功能模块,便于功能的扩展;
④自配网络支持,可以为数控系统的网络扩展提供便利;
⑤嵌入式Linux操作系统自身的功能十分强大,且性能稳定,可以切实保证数控系统开发的顺利进行。
嵌入式数控机床的设计与实现
以某数控机床的嵌入式数控系统的设计为例,对其进行分析和阐述。
作为一个多任务和实时性并存的系统,数控机床对于数控系统的要求较高,单纯依靠Linux虽然可以满足系统的多任务操作,但是却不能满足其对于实时性的要求,因此,要在系统中添加DSP 处理器,同时,为了实现对伺服驱动器的闭环控制,需要实现脉冲量和数字量之间的相互转换,通常情况下,采用的FPGA实现这一目标。
3.1.硬件构架的设计
该数控机床的嵌入式系统框架可以分为三个基本模块,即控制模块、DSP模块以及FPGA模块。
为了切实保证系统功能的发挥,使用ARM处理器XScalePXA270作为系统控制模块的核心,TMS320c6713作为DSP模块的核心,并通过相应的数据、地址总线等,实现与FPGA的连接,利用FPGA实现对伺服驱动器的闭环控制。
3.2.系统实时性分析
为了切实满足数控系统的实时性,为操作人员提供舒适方便、人性化的操作界面,需要在设计时充分考虑系统实时性的分析和划分问题。
在数控机床的系统结构下,软件的运行环境包括以下三种:
3.2.1.基于ARM的Linux环境
ARM凭借自身丰富的外围接口和强大的控制功能,实现对数控系统的控制,而Linux系统虽然可以满足多任务操作,但是实时性较差,因此在该环境下,适合运行控制软件,而不是运算量较大的程序。
3.2.2.DSP环境
DSP具备处理速度快、数据运算效率高的特点,芯片上具有专用的硬件乘法器,在一个指令周期内,就可以完成一次乘法和一次加法。
其处理器内部不存在操作系统,因此属于单任务运行,不存在对于进程的调度问题,可以运行对于实时性要求较高,或者运算量大的软件。
3.2.3.FPGA环境
FPGA的优点在于具备超高速、丰富的逻辑资源,以及较为灵活的逻辑功能,可以通过合理配置,应对多样性的逻辑接口功能,适用于灵活多变的场合。
FPGA具有极强的可编程能力,支持重复编程和逻辑编程,可以执行一些实时性高、逻辑固定以及延迟低的任务和进程。
由于FPGA的运行主要由硬件时序逻辑之间的配合完成,因此运行速度高,实时性强,但是控制功能较差,浮点运算能力也相对较差。
在该数控系统中,内部软件主要包括:控制I/O的软PLC部分、手轮控制、G代码译码、粗插补和细插补、驱动器脉冲伺服以及反
馈、图形用户界面部分、以及信息通讯部分。
其中,控制I/O的软PLC部分、G代码译码以及图形用户界面部分相对简单,而且对于实时性要求较低,因此可以将其放在一起进行设计,在Linux系统环境下运行。
与外界信息的交流组件,如U盘、SD卡等,由于其信息的存储和读取都需要通过Linux文件实现,因此同样放置在Linux 内核中,且不需要设置辅助程序。
而粗插补和细插补、手轮控制对于软件的实时性要求较高,其代码在DSP中运行。
数据在转换过程中,为了防止脉冲丢失所引发的失步现象,避免其对于系统正常运行的影响,将驱动器脉冲伺服与反馈放在FPGA 环境中运行。
3.3.通讯功能的实现
为了确保不同模块之间的相互协调和合作,保证系统功能的充分发挥,需要在模块间建立相应的通讯功能。
这里模块之间的通讯如下:
对于用户而言,可以利用相应的网络或存储设备,复制G代码程度到Linux系统中,通过PXA270处理器,实现对于G代码的后
台译码,从而将其转换为坐标值和功能号代码,并进行存储。
ARM 在将数据写给DSP之后,DSP可以利用粗插补和细插补程序,得到脉冲数和相应的脉冲周期,并将之放入DSP缓冲队列中。
当FPGA 的时钟信号触发DSP中断时,DSP中的相关程序会将脉冲数和相应的脉冲周期从缓冲队列中提取,发送给FPGA,而DSP则根据数据发送的脉冲数,对机床加工刀具位置坐标进行计算。
将计算出的坐标传输给PXA270,在图形用户界面显示出来,并反馈给FPGA,对伺服驱动器进行驱动,进而确保数控机床的数控功能可以得到充分发挥。
如果用户选择手轮驱动伺服电机,则FPGA会将手轮信息传输给DSP,经过快速处理后,将数据转化而成的脉冲数发回FPGA,进而驱动伺服电机。
总之,随着数控化技术在机床中的应用越来越广泛,对于数控系统的功能也提出了更高的要求。
目前,我国对于嵌入式数控机床的研究尚处于起步阶段,与发达国家存在较大的差距,而数控系统的性能对于实现制造业的自动化、智能化和集成化有着至关重要的作用。
因此,加强对于嵌入式数控机床的自主研究和开发,提高数
控系统的性能,不仅可以提升我国数控产业的整体水平,还可以提高社会经济的发展水平,推动社会持续稳定发展。
这里填写您的公司名字
Fill In Your Business Name Here。