海上自升式平台电动升降装置的研究
自升式平台论文:D80型升降系统胜利十号平台的应用
自升式平台论文:D80型升降系统胜利十号平台的应用摘要:随着我国海洋石油勘探开发及海洋工程领域的不断发展,越来越多的高技术含量、高附加值产品如船舶、平台等海工装备得以开发并投入使用。
“胜利十号”是近年中石化集团公司投资兴建的一条自升式钻井平台,是在总结中油海5、6、7、8号等平台设计的基础上,对平台结构和设备布置进行的优化。
文章以该类型的平台为例,探讨d80升降装置的制作安装易出现的问题及升降系统操作应注意的事项,以供业内人士参考。
关键词:自升式平台;d80;升降系统;电机海上自升式平台在我国海上油田的勘探开发中,占据着非常重要的地位。
由于平台远离陆地,环境恶劣复杂,海洋油气开发由于诸多条件的限制处在高度危险的环境中,因此设备的技术含量较高,而且价格昂贵,发生故障造成的损失也较大。
升降系统是平台极其重要的组成部分。
事实分析证明,自升式平台的事故有一半以上发生在拖航和升降平台的时候。
据统计,在所有海上移动式平台中,自升式平台的事故约占全部平台事故损失数量的75%。
研究升降系统安装、维护和使用,排除系统故障,对于提高平台的整体安全性能,降低设备维护维修运行费用,减少海上施工作业成本,减少升降船时间,提高海上平台生产效率,避免灾害性事故带来的影响等不良后果都有着非常重要的作用。
2010年5月,大船重工海洋工程公司为中石化胜利海洋钻井公司建造的“胜利十号”自升式钻井平台交付,建造周期12个月。
该平台总长75.21m,型宽53m,型深5.5m,作业水深50m,最大钻井深度 7000m,在同一地点可以钻探最多30口井。
该平台建成投产后成为胜利海洋钻井公司适用水深最大、施工能力最强的钻井平台。
1胜利十号平台升降系统简介升降系统装置安装在桩腿和平台主体的交接处,驱动装置使桩腿和主体作相对的上下运动,目前,自升式平台的升降系统大致分为两大类:一类为齿轮齿条式,另一类为液压油缸顶升式。
目前应用最为广泛是齿轮齿条式,齿轮齿条式升降平台从动力驱动系统上一般有两种方式:即液压驱动和电驱动。
海洋平台结构作业——自升式海洋平台升降结构

常见自升式海洋平台升降结构对比分析班级:学号:姓名:目录一、自升式平台简介 (3)二、现有常见升降结构 (4)1、圆柱型桩腿一单环梁液压升降装置 (4)2、方壳型桩腿—双环梁液压升降装置 (6)3、桁架型桩腿一齿轮齿条升降装置 (7)三、升降系统的对比 (8)1、桩腿结构形式对比 (8)2、触底形式对比 (9)3、升降装置对比 (10)4、动力源对比 (11)一、自升式平台简介自升式平台是一种海上活动式钻井装备,目前是我国海洋石油勘探中使用最多的一种钻井平台,由于其作业稳定性好和定位能力强,在大陆架海域的油气勘探开发中居极其重要的地位。
自升式平台主要由平台主体、桩腿、升降锁紧装置、钻井装置(包括动力设备和起重设备)以及生活楼(包括直升飞机平台)等组成。
平台在工作时用升降装置将平台主体提升到海面以上,使之免受海浪冲击,依靠桩腿的支撑稳定的站立在海底进行钻井作业。
完成任务后,降下平台主体到海面,拔起桩腿并将其升至拖航位置,即可拖航到下一个井位作业。
因此,支撑升降系统的结构对自升式海洋工作平台的安全有着至关重要的作用。
自升式平台的工作状态如图一所示。
图一二、现有常见升降结构支撑升降系统作为自升式平台中的核心部分,在平台的设计建造中历来受到高度重视,其性能的优劣直接影响到平台的安全和使用效果。
最常用的升降装置是齿轮齿条式和顶升液压缸式。
具体可见下表壳体桩腿是封闭型桩腿,其桩腿截面有圆形和方形两种形式;桁架式桩腿截面有三角形和四方形两种形式。
不同截面形状的桁架式和壳体式桩腿与不同类型的升降驱动方案相互组合,衍生出多种能够实现升降平台功能的支撑升降系统类型。
1、圆柱型桩腿一单环梁液压升降装置销子、销孔和项升液压缸是一种升降装置。
系统原理图如图二。
图二每一桩腿有两组液压动作的插销和一组顶升液压缸。
当装在环梁上的一组环梁销插入到桩腿的销孔中时,一组顶升液压缸的同步动作即可使环梁及销子带动桩腿(或平台主体)升降一个节距,然后进行换手:将锁紧销推入到桩腿的销孔中,退出环梁销,液压缸和环梁复位,下一个工作循环开始。
自升式海上钻井平台液压升降系统解析

自升式海上钻井平台液压升降系统解析摘要:本文对海洋平台液压升降系统以往的情况,对液压举升系统的结构,工作过程,液压控制系统进行分析。
关键词:液压升降系统;分析介绍一.引言自升式海上钻井平台液压升降系统,由一组独立的海上钻井平台提高液压驱动系统,确保桩腿可以克服泥砂带来阻力和自身重力,将桩腿插入或拔出海床和升降平台。
根据升降平台、操作、自储存、预压等的重量计算出压力条件下的重量和重力,确定正常的起重能力,预提升系统容量的提高起升速度。
液压升降系统的设计平台应满足以下功能:确保系统有足够的力量去克服阻力和平台的重力,将桩体腿插入或拔出;在桩腿的工作过程,转动应平稳,无卡阻现象;插桩或桩过程,液压能满足一定的节距的要求;系统设计自锁液压升降系统,在各种工作和非工作状态时,该系统可以实现自锁,由计算机或控制台命令完成升降工作。
二.国内外自升式海上钻井平台现状随着陆地油气资源开采力度的日渐加大和油气储量的不断减少,占全球资源总量约34%的海洋石油资源已成为人们关注的焦点和新一轮油气勘探开发的热点。
海洋钻井平台作为海上油气勘探开发的重要装备之一,目前已在世界范围内受到了普遍关注。
受海洋作业恶劣环境的影响,海洋钻井平台技术发展在近十几年中发生了重大变化,人们已经不再满足于过去传统的平台装备技术和钻探方式,而是逐渐将目光从浅海移向深海、由浅油气层转向深油气层、由简单地质层转向复杂地质层等,从而使得海洋钻井平台装备也随之由过去比较单一的固定式、自升式等装备发展到技术先进、控制性好、钻探能力强、适应范围广的钻探船、半潜式平台等勘探开发装备上来,并已成为当前和今后一段时间内世界海洋油气勘探开发的必然趋势。
纵观世界海洋钻井平台的发展历史,自1887年世界上最早的海上石油勘探开发工作起源以来,直到50多年以后,也就是20世纪40年代末期,海上石油工程才开始有了新的起色并发生了较大变化。
当时世界范围内共有3个国家能够从事海上石油开发工作,所用的平台都是固定式平台,且结构和钻井方式均比较简单,平台适应水深的能力只有几十米。
自升式海上钻井平台升降系统技术特点分析

压 马达, 可使 升降 系统 针对 不 同 的载荷 采用 不 同 的 速度 ,这 样 节 省 了平 台 升降 的时 间 ;③采 用 大 扭
矩 、低转 速 的液 压马达 可减小 减速箱 的传动 比,从
而减小其 尺寸和 造价 。 从 操 作方式及 故障 率来看 ,两种驱 动升降方 式
均 需设置集 中控 制 台和 桩边 控制 台,集 中控制 台 内
2 齿 轮齿 条 升 降系统 的设 备 组 成
自升式平 台的桩腿齿 条是 沿桩腿 圆筒 或玄杆铺升 降系统传
动装 置 的末端 ,整 个升 降系统 的动力 由电动机或液
压马 达输 出 ,通过联 轴器传 输到传 动装置 ,再 由传 动装置 传递给 小齿轮 ,最后通 过小齿 轮驱动齿 条作
翔
T ur … o n
(7 t 0) 1
c
一 条棠 茎
B 8 00 0N・ 以上 。 目前 国 内缺 乏这 种 大速 比减 速 0 0 m
机 构 的设 计制 造 经验 ,对 于其受 力 分析 、动 力学研 究 、振 动噪声 控 制 、弹性 啮合 原理 以及 载荷 分配 等
每座平 台典型 的 电动齿 轮齿条 式升 降系统 的主
齿 轮齿条 升降 的方 式 比较 多 。所 谓齿轮 齿条式 升降
系统就是 在平 台的每根齿 条上设 置几个小 齿轮 ,齿 条及 其对应 小齿轮 数量根 据平 台所 要求 的举升能 力
和平 台总体要 求加 以确定 。动力通 过桩边 马达驱动
直 线运 动 ,从 而带动桩 腿或平 台进行 升降作业 。对
l 圈 梁 ; 2 平 台 主 甲板 ; 3 顶 升 油 缸 ;4 升 降 室 顶 饭 ; 一 — 一 -
于一个 三根绗 架式桩腿 的 自升 式平 台来说 ,每一个 桩 腿 上都有 三 根玄杆 ,每根 玄杆 上 设有 两道 齿 条 , 每 道齿 条上有 上下 两个小 齿轮 与之 啮合 ( 图 3 , 见 ) 每一 对 啮合 齿轮及 其驱 动 、传 动装置构 成一个升 降 单元 ,一般 来讲 ,升降 系统 由数 个或数 十个升 降单
海上风电安装平台升降系统同步控制研究

海洋平台海上风电安装平台升降系统同步控制研究刘伟1,2,叶树林1,刘会涛2(1.佛山科学技术学院机电工程与自动化学院,广东佛山528000;2.广东精铟海洋工程股份有限公司,广东佛山528000)摘要:文章针对海上风电安装平台的升降系统在升/降过程中受到扰动后同步性能变差的问题,设计了基于幂次趋近律的滑模变结构控制方法,用来提高升降系统的同步性能和抗干扰能力。
文章采用滑模控制器设计转速环控制器,应用偏差耦合同步控制策略,对同步误差控制器作出改进。
利用Simulink 建立了4台异步电机的同步控制模型,分别验证了单电机的滑模控制和多电机的滑模同步控制的控制效果,并根据仿真图像分析,得出了以下结论,即对于单电机控制,滑模控制的效果较PI 控制器具有更高的鲁棒性;对于多电机同步控制,滑模同步误差控制器相较传统偏差耦合控制策略,同步精度高,且鲁棒性强。
关键词:升降系统;多电机同步控制;矢量控制;偏差耦合;滑模控制中图分类号:P75文献标志码:Adoi :10.13352/j.issn.1001-8328.2024.02.014Abstract :This paper designs a sliding mode variable structure control method based on the power reaching lawto improve the synchronization performance and anti-interference ability of the lifting system of the offshore windpower installation platform.The study adopts the sliding mode controller to design the speed loop controller and ap⁃plies the deviation coupling synchronous control strategy to improve the synchronous error controller.This paper es⁃tablishes the synchronous control model of four asynchronous motors via Simulink to verify the control effect of sliding mode control of a single motor and sliding mode synchronous control of multiple motors,respectively.The results of simulation image analysis demonstrate that the effect of sliding mode control is more robust than that of PI controller for single-motor control;for multi-motor synchronous control,the sliding mode synchronous error controller hashigher synchronization accuracy and stronger robustness than the traditional deviation coupling control strategy.Key words :lifting system;multi-motor synchronous control;vector control;deviation coupling;sliding modecontrol作者简介:刘伟(1999-),男,湖北荆门人,在读硕士研究生,研究方向为装备制造和电气传动。
海上自升式修井作业平台的设计探讨
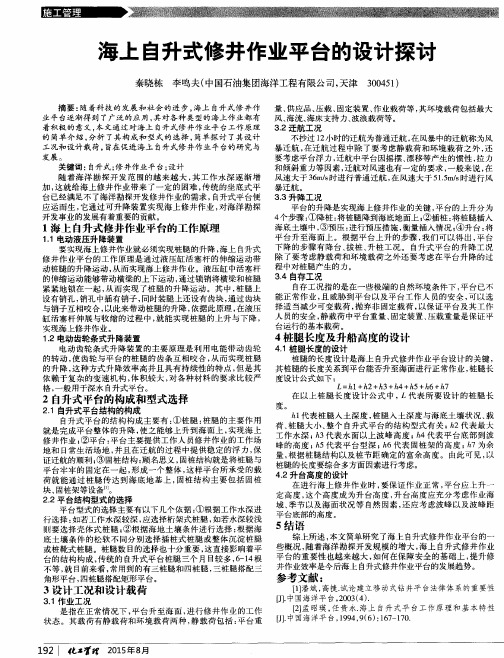
4 桩腿长度及升船高度的设计
电动齿 轮 条式升 降装 置 的主要 原理 是利 用 电能带 动齿 轮 4 . 1 桩 腿长 度的设 计 的 转动 , 使 齿轮 与平 台的桩 腿 的齿 条互相 咬合 , 从 而 实现桩 腿 桩腿 的长度设 计是海上 自升式 修井作业 平 台设 计的关 键 , 的 升降 , 这 种方 式升 降效率 高并 且具 有持 续性 的特 点 , 但是 其 其桩腿 的长度关 系到平 台能否升至 海面进 行正常作 业 , 桩腿长 依 赖于 复杂 的变速 机构 , 体 积较 大 , 对 各种材 料 的要 求 比较 严 度设计公式如 下 : L=h l+^ 2+ 3+ 4+矗 5+ 6+ 7 格, 一般用 于深 水 自升式平 台。 在 以上 桩 腿长 度 设计 公 式 中 , 三代 表所 要 设 计 的桩 腿长 2自升式平台的构成和型式选择 度。 2 . 1自升式平台结构的构成 l 代表 桩腿 入土深 度 , 桩腿 入土 深度 与海底 土壤 状况 、 载 自升式 平 台的 结构 构成 主要有 : ①桩 腿 : 桩 腿的 主要 作用 荷、 桩 腿大 小 、 整个 自升 式平 台的 结构 型式有 关 ; 2代 表最大 就 是完 成平 台整体 的升 降 , 使 之能 够上升 到海 面上 , 实现 海上 工 作水深 ; 3 代 表水 面 以上波 峰高 度 ; 4代表 平 台底 部到 波 修 井作 业 ; ② 平台 : 平 台 主要提 供工 作人 员修井 作业 的工 作场 峰 的高 度 ; 5代表平 台型深 ; ^ 6代表 固桩架 的 高度 ; 7为 余 地 和 日常生 活场地 , 并且 在迁 航的 过程 中提供 稳定 的浮 力 , 保 量, 根 据桩 腿结 构以 及桩节 距确 定的 富余 高 度。 由此 可 见 , 以 证 迂航 的顺利 ; ③ 固桩 结构 : 顾名 思义 , 固桩结 构就是 将桩腿 与 桩腿 的长 度要综合 多方 面因素进行考虑 。 平 台 牢牢 的固定 在一起 , 形成 一个 整体 , 这样平 台所 承受 的载 4 . 2升台高度的设计 荷 就 能通 过 桩腿 传 达到 海 底地 基 上 , 固桩 结构 主要 包 括 固桩 在进 行海上 修井 作业 时 , 要 保证 作业 正常 , 平 台应 上升 一 块、 固桩架等设备u 。 定 高度 , 这 个高 度成 为升 台高 度 , 升 台高度 应 充分考 虑作 业海 2 . 2平台结构 型 式的 选择 域、 季节 以及海 面状 况等 自然 因素 , 还 应考 虑波 峰以 及波 峰距 平 台型式的选 择主要 有以下 几个依据 : ①根 据 工作水深进 平 台底部的高 度。 行选择 : 如若 工作水 深较深 , 应选 择桁架 式桩腿 , 如若 水深较 浅
自升式海洋平台抬升控制系统

自升式海洋平台抬升控制系统摘要:讨论了自升式钻井平台的发展历史,抬升控制系统的主要特点及要求,进一步阐述了设计理念与主要技术,给出平台抬升控制系统的产品特点及未来的展望。
0 前言随着世界经济进入资源环境瓶颈期,在全球石油需求持续增速背景下,及陆地油气资源开采出现瓶颈的大环境下,势必拉动海洋石油勘采的资本支出。
全球正进入到全面开发利用海洋的时代,各国对海洋资源的开发和争夺异常激烈,海工装备市场将迎来前所未有的商机。
我国陆地油气资源勘探开发程度现已很高,油气资源正迅速减少。
向海洋进军,开发新的油气资源已成必然趋势。
我国拥有漫长的海岸线和广阔的海域,油气资源十分丰富。
在渤海,南黄海,东海,南海已有发现并进入早起开采。
我国“船舶工业中长期发展规划”要求大力开展技术创新,提高自主研发能力。
根据我国能源发展的形式和要求,为我国海洋油气勘探开发提供新型,经济,实用的海洋工程装备是我国造船界面临的新的机遇和挑战,也是责无旁贷的光荣任务。
1、抬升控制系统随着对油气资源开发利用的深化,油气勘探开发从陆地转入海洋。
海上钻井平台的稳定性和安全性更显重要。
当作业水深在250至300 英尺范围内,自升式钻井平台被普遍采用。
自升式钻井平台即带有能够自由升降的桩腿,作业时桩腿下伸到海底,站立在海床上,利用桩腿托起船壳,并使船壳底部离开海面一定的距离(气隙)。
拖航时桩腿收回,船壳处于漂浮状态。
图1 自升式钻井平台自升式钻井平台有两种型式,独立桩腿式和沉垫式。
平台稳定站立后,大多数悬臂梁可以将钻台外伸到固定平台。
在风大浪急的海面不能进行拖航。
1)支撑型式:桩靴式;沉垫式。
2)升降装置:液压缸升降(插桩式);齿条/齿轮箱。
3)桩腿结构型式:筒型;绗架。
4)桩腿数量:3腿;4腿;6腿。
5)槽口:有槽口;无槽口。
6)生活楼的布置:横向布置;周边布置。
自升式钻井平台,又称为桩脚式钻井平台,是目前国内外应用最为广泛的钻井平台。
自升式钻井平台可分为三大部分;船体,桩脚和升降机构。
自升式海上钻井平台升降系统技术特点分析 (1)

随着海洋开发战略的不断发展,对于海洋工程 装备的需求将日益旺盛,从自升式海上平台升降系 统的发展趋势来看,应着手研究开发电驱动式升降 系统。
参考文献 [1] 《自升式海洋平台齿轮齿条升降系统的研究》 作者:孙永泰
《石油机械》 2004-10-10. 收稿日期:2011-03-09
以每种新的传动形式的升降机构都需要进行破坏试
见表1电动齿轮齿条升降系统厂家名称法国blm荷兰msc美国letourneau驱动方式电动机驱动电动机驱动电动机驱动自升式海上平台升降系统汇总升降单元型号额定提升力c50180tc105270t150t300t170t200t450t270t320t360t齿条型式升降单元布置方案预压拔桩提桩等等每种工况过程中升降机构的受力状况以及升降速度的变化都需要进行分析否则对于升降系统的结构形式和传动方式选择都无法进行
725KIP 800KIP
(320t) (360t)
单边齿条 布置:18
机构的设计制造经验,对于其受力分析、动力学研
究、振动噪声控制、弹性啮合原理以及载荷分配等
(2) 国内方面
方面还需要进一步的研究;
近几年,国内从事海洋工程的各大公司和科研
(3) 高强度超大模数齿轮的设计与制造 与齿条啮合的小齿轮为超大模数齿轮,模数一
驱动 升降单元型号 齿条
升降单元
受力状况以及升降速度的变化都需要进行分析,否 名称
则对于升降系统的结构形式和传动方式选择都无法 法国
BLM
进行;
方式
电动机 驱动
(额定提升力) 型式
布置方案
C50 (180t) C105 (270t)
齿条数/桩腿:2 双边齿条
C50 布置:36 或单边齿条
海洋自升式平台升降系统修复研究与实践
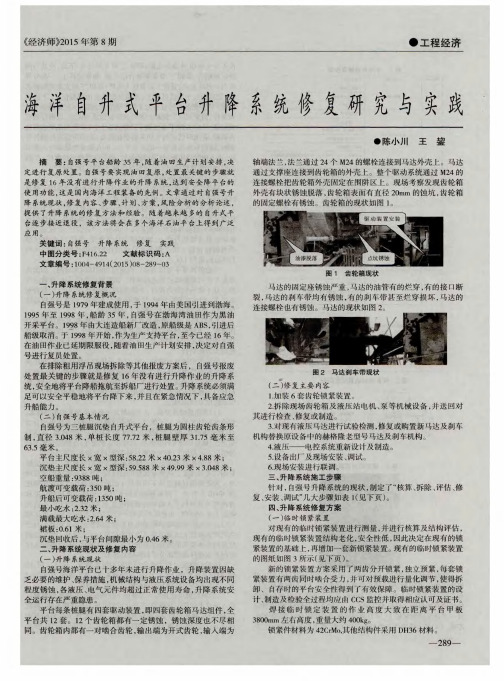
( 四) 调 试
根据调研情况 , 原液压系统 的大部分管路 和元件 已经失效 , 且元件无法在市场上找到替代品 。 液压 回路泵 源由双联泵控制 , 主泵控制 马达 主回路 , 副泵控 制马达的刹车 回路 。 液压系统采用 比例控制 阀控制 , 配置平衡 阀 具有一定 的抗 冲击 及稳定性 ,出于安全考虑系统能限制平 台的 最大升降速度 , 避免超速使平 台遭到破坏 。 液压系统配备有 独立 的电气控制 系统实现设备 动作要求 , 同时可输 出液 压系统的压力等运行信号 ,供设备整体性能分析 使用 。 1 . 液压管 线。液压装置钢管采用 普通碳钢钢管 , 钢管 直径 、 壁厚 等按船用 相关 标准计算确定。软管根据工作压力和使用状 态具体配置 ,在管路各部分的最高和最低位置上分别设有排气 和放油设 备 , 以保证液压油中的气体和污油顺利排放。 中间管线采用 高压软管连接 。 根据设备使用 的环境 ,液压系统介质使用 V G 4 6抗磨液压 油, 油液颗粒度为 N A S 1 6 3 8 7级 ; 2 . 电控设备 。根据勘察情况 , 电气元件均为 7 0年代产 品, 部 分控制 回路采用单 片机 、 电路 板等老式部件 。 更换元件 均较难采 购。该套控制系统部分传感器遗失 , 加 上原液压系统恢复 困难 , 恢复意义不大。电控设备根据新液压系统进行配置。 3 . 电控系统 。具有桩腿单元 的控制逻辑 、 数据采集 、 平 台状 态监控 、 故 障报警等功能 , 进行桩腿 的升降, 各主 电机的启停 和功 能切换 。 ( 1 ) 速度检 测以及同步问题。在平台上升或者下降过程 中, 通过在设定时间 内计量感应脉 冲数来计算平 台上 升或 者下 降速 ( 上接 第 2 8 8页 ) 则, 招 标单位 对 工程 量 进 行 计 算是 工 程量 清 单 计 价模 式 的 特 点 。依 据 自己取 得 的 市 场 价 格 信 息 与 工 程量 , 招投 标的单位 可以进行组价。基于 此, 建 设 主 管 部 门必 须 允许 相 关 部 门 、 单 位 对 市 场 价 格 信 息进 行 定 期 发 布 ,形 成 套 收集 、整理 与发 布市场价格信 息的 完善 体 系 , 确 保 市场 价 格 信 息 的 通 畅 性 。 投 标 单 位 利 用 市 场 价 格 信 息 , 结合 企 业 定 额 ,与 招 标 文件 及 相 关 规 范要 求 相 结 合, 制 定 出有竞争 力的投标 报价 , 提 高企 业 的 市 场 竞 争 力 。从 而 增 加 我 国 水 利 工
海上钻井平台升降系统控制方案研究
1 海上自升式钻井平台概述自升式钻井平台升降系统主要可分为两类,即齿轮齿条升降系统和孔穴插销升降系统。
由于齿轮齿条升降系统具有操作简便、易于对位和并位,以及升降速度快等特点,为适应海上恶劣的勘探条件,新型自升式钻井平台中多采用了这种升降系统。
本文也主要以齿轮齿条式升降系统为例,研究与探讨了其控制操作方案。
2 海上钻井平台升降系统的动力方案与结构组成2.1 动力方案选择齿轮齿条升降系统按照动力驱动方式的不同,主要分为电驱动方式与液压驱动方式这两种。
其中齿轮齿条电驱动升降系统,即是齿轮箱通过电马达驱动,再带动小齿轮的运转和桩腿的升降动作;齿轮齿条液压驱动则是采用液压马达进行驱动。
然而在实际应用中发现,液压驱动方式的故障率更高,而且需要额外添加一个液压站,成本更高,因此在实际应用较少。
在本文中,选择电驱动作为齿轮齿条式升降系统的动力方案。
2.2 结构组成齿轮齿条电驱动升降系统的结构主要是由动力驱动系统、动力传动系统以及升降控制系统这三大部分所组成。
其中,动力驱动系统和动力传动系统主要由电马达、齿轮箱、齿轮齿条、减速机构等组成。
而升降控制系统作为整个海上钻井平台升降系统的关键所在,其不仅需要控制电机的运行和桩腿的升降,还需要通过对桩腿高度的实时控制与监测,以保持平台面的水平。
本文研究的升降控制系统采用了分布式控制方案,并基于可编程逻辑控制器PLC实现现场各个升降点的系统控制与全过程监控,从而全自动的实现了平台与桩腿的同步升降、自动测量、过程显示、姿态纠正、故障报警等多项功能。
3 海上钻井平台升降系统的控制方案3.1 总体控制方案海上自升式钻井平台升降系统采用了分布式的控制方案,在桩腿与平台的升降过程中实现了全自动的控制、定位与监视功能。
整个分布式控制方案的系统结构可以分为三层。
第一层为中央控制室:包括了显示器、工控机、ET200从站等,其功能是便于人机交互,实现全过程的监控;第二层为配电室:包括了变频控制PLC主站、封装控制单元、变频控制单元等等,其中变频控制PLC主站是整个控制方案的核心元件,其功能主要用于控制所有电机的正常运转;第三层为现场控制箱:包括了3个桩腿和PLC控制箱、现场总线PROFIBUS-DP与PLC控制箱、中央控制器相连接,从而实现各层间的数据信息传递,保证了数据信息的分散控制与集中化处理。
JYM―J20054型自升式海上钻井平台升降系统研制

JYM―J20054型自升式海上钻井平台升降系统研制摘要:安装有国内首制并拥有完全自主知识产权升降系统的“DSJ300-3”和“CP300-3”两座自升式海洋石油钻井平台,已分别在大连重工和辽河重工下水站桩。
这两座平台应用的JYM-J200/54型升降系统均由广东精铟海洋工程股份有限公司自主研发,设备整体制造及试验过程由中国船级社(CCS)专家组全程监控,并取得CCS产品证书。
同时,JYM-J200/54型升降系统整体设计通过了美国船级社(ABS)总部审核;控制系统可靠性通过了挪威船级社(DNV)验证。
关键词:自主知识产权;升降系统;自升式钻井平台中图分类号:TE923 文献标识码:AAbstract:Install the domestic first and have complete independent intellectual property rights of the lifting system “DSJ300-3”,“CP300-3”two self elevating offshore oil drilling platform,were in Liaohe heavy water station.JYM-J200/54 type lifting system of the two platforms used by Guangdong refined indium machinery limited company independent research and development,equipment certificate of CCS products. At the same time,JYM-J200/54 type lifting system design through the USA Classification Society (ABS)Americaheadquarters to review;the reliability of the control system through the Norway Classification Society(DNV)verification.Key words:Independent intellectual property rights;lifting system;jack up drilling platform1 前言安装有国内首制并拥有完全自主知识产权升降系统JYM-J200/54的“DSJ300-3”平台2014年3月在大连重工下水站桩(图1),“CP300-3”平台2014年7月4日在渤海装备辽河重工下水(图2)。
自升式海洋钻井平台升降系统的分析与研究

自升式海洋钻井平台升降系统的分析与研究作者:吴碧珺来源:《科技创新与应用》2015年第16期摘要:随着世界经济的飞速发展,海洋开发己经成为世界技术革新的重要内容,而海洋油气田的开发又是现今海洋资源开发利用的重中之重。
自升式海洋钻井平台是海洋油气勘探和开发的主要装备。
目前,国内使用的钻井平台中的控制系统基本都由国外制造,国内对其升降系统的分析相对较少。
所以,探讨和研究这一方面的内容意义深远。
关键词:自升式平台;升降系统;齿轮齿条式1 概述升降系统是自升式海洋钻井平台的关键部分。
其位置位于平台的主体和桩腿的交接处,作用是让桩腿和船体作相对的上下运动,从而使得平台主体能上下移动并将其固定在桩腿的某一位置。
根据升降系统结构形式的不同,一般可分为液压油缸式升降系统和齿轮齿条式升降系统。
液压油缸式的优点是:油缸的结构简单,力的传递直接,安全性高。
缺点是:桩腿升降框架的结构庞大,用钢量很大,操作的工序相对更复杂。
齿轮齿条式的优点是:升降运动连续性好,传动的速度快,可调速,受载均匀,操作简单,井位易对准。
缺点是:齿轮齿条的制作难度大,成本高,控制相对复杂。
由于海洋环境比较恶劣,平台升降所需要的时间对于平台的安全性就显得非常重要,同时运用齿轮齿条式升降平台可减少平台的就位费用,因此目前多采用此类系统。
2 齿轮齿条升降系统的设备组成齿轮齿条式升降系统通常由升降装置、升降框架、导向装置、桩腿以及电控系统组成。
升降装置一般由电动机、减速箱、制动器、小齿轮等组成,如图1所示。
电动机以前常用的是滑差式电机,后来变频技术越来越成熟,而且控制方便,于是逐渐取代了滑差式电动机。
减速箱一般由平行轴轮系和行星轮系两部分构成,速比很大,有的甚至上万。
制动器通常选择的是电磁圆盘式,其扭矩一般不小于1.2倍的暴风载荷。
小齿轮由高强度合金钢经特殊工艺加工而成,齿数一般为7齿,模数通常为80以上,目前世界上最大的小齿轮模数已经达到了110。
图1 齿轮齿条升降装置升降框架一般为封闭性环梁结构,如图2所示,它是连接升降装置和平台主体的框架,起承上启下的作用。
海上钻井平台升降系统的控制方案研究

海上钻井平台升降系统的控制方案研究摘要:海洋移动式平台是海洋油气勘探、开发的主要设备。
确保海洋平台平稳、精确、可靠地升降并长期安全运行,是平台设计中的一个重要关键技术。
该文从工作原理、硬件配置以及具体实施方案等方面介绍了自升式海上钻井平台升降系统多电机同步控制的难点并提出了解决方案。
关键词:海上钻井平台升降系统控制方式引言近些年,海洋工程市场异常活跃,国内各大船厂相继承接各种海洋工程项目,也逐步将海洋工程作为各大船企发展的一个主要方向。
自升式钻井平台作为海洋工程项目中的主力船型之一,也是国内建造数量较多的海洋工程项目,但由于国内船厂涉足自升式钻井平台的时间较短,现在国内船厂建造的绝大部分自升式钻井平台的基本设计都是由美国和欧洲设计公司完成。
本文希望通过对自升式钻井平台结构设计需满足的规范规则研究,进一步提高我们自升式钻井平台结构设计的能力,以达到自主完成自升式钻井平台结构设计的水平。
二.海洋钻井平台介绍自升式钻井平台是一种用于海上石油和天然气勘探、开采工程作业的钻井装置,其可以依靠自身的升降系统完成主体结构的上下升降作业,以达到在不同深度的海域作业的要求。
自升式钻井平台主要由主船体、上层建筑、桩靴、桩腿、升降系统结构、悬臂梁、钻台、和直升机平台几大部分组成。
在自升式钻井平台结构设计中,主要包括结构强度计算、材料选取、焊接设计三大方面。
下面我们就按照上述三大方面内容进行相关研究。
自升式钻井平台的主船体结构与上层建筑结构与船舶产品基本类似,这两个部位的结构强度计算主要被分为:有限元强度分析、结构疲劳及屈曲校核以及结构规范计算。
三.海上钻井平台升降系统的控制方案研究工作原理在传统的主从速度一转矩控制方式中,主站包含正常的速度环和电流环,而从站只拥有电流环,从站接收主站的速度环的输出作为其自身电流环的给定,从站自身的速度环在整个运行过程中不起作用;因此,在运行过程中一旦某个从站机械传动链发生断轴,该站就会因为负载突然变小,导致速度急剧增大,又因速度环不起作用,所以容易造成严重的飞车事故,只能靠超速开关动作来切断所有控制。
新型自升式海洋平台升降装置[实用新型专利]
![新型自升式海洋平台升降装置[实用新型专利]](https://img.taocdn.com/s3/m/6b46cf6284868762cbaed52f.png)
专利名称:新型自升式海洋平台升降装置
专利类型:实用新型专利
发明人:付雪川,翟红升,傅裕,严作堂,林青,聂熙申请号:CN201220429902.3
申请日:20120828
公开号:CN202718077U
公开日:
20130206
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种新型自升式海洋平台升降装置,其少齿差行星齿轮减速机构的曲轴与液压马达的转动轴联接,所述少齿差行星齿轮减速机构的内齿圈和NGW行星齿轮减速机构的内齿圈分别与中间法兰连接,同时所述NGW行星齿轮减速机构的内齿圈与后支撑法兰连接,所述后支撑法兰安装在平台主结构架上,所述少齿差行星齿轮减速机构的行星架与NGW行星齿轮减速机构的太阳轮联接;所述NGW行星齿轮减速机构的行星架与齿轮输出轴联接,所述齿轮输出轴上安装有输出齿轮。
本实用新型利用现有液压马达来升降单齿提升力80-200吨,力放大倍数可达300-500倍,还采用全新的安装方式,非常便于新型自升式海洋平台升降装置的安装调整和拆卸,具有很广泛的市场前景。
申请人:郑州机械研究所
地址:450001 河南省郑州市高新技术产业开发区枫杨街10号
国籍:CN
代理机构:郑州金成知识产权事务所(普通合伙)
代理人:郭增欣
更多信息请下载全文后查看。
自升式海洋平台升降传动系统设计关键技术研究的开题报告

自升式海洋平台升降传动系统设计关键技术研究的开题报告一、研究背景及意义近年来,随着海洋工程的快速发展,大型海洋平台的建设需求不断增加。
例如,海上风电、海上油气开发等领域,在平台建设过程中,升降传动系统是一个重要设备,关乎到平台的稳定性和运行效率。
因此,对海洋平台升降传动系统设计关键技术的研究具有十分重要的意义。
二、研究目标本研究旨在开展自升式海洋平台升降传动系统的设计关键技术研究,主要包括以下目标:1.分析海洋环境对升降传动系统的影响,确定升降传动系统的设计参数。
2. 研究自升式海洋平台升降传动系统的控制策略,实现升降过程的控制和稳定。
3.研究升降传动系统的结构设计与工艺制造,保证系统的可靠性和稳定性。
三、研究内容本研究将主要围绕自升式海洋平台升降传动系统的设计关键技术展开研究,具体研究内容包括:1. 海洋环境分析与设计参数确定:通过对海洋环境进行分析,确定海洋平台升降传动系统的设计参数,包括升降高度、升降速度、承受载荷等。
2. 控制策略研究:研究自升式海洋平台升降传动系统的控制策略,实现升降过程的控制和稳定,包括PID控制策略、模糊控制策略、神经网络控制策略等。
3. 结构设计与工艺制造:研究升降传动系统的结构设计与工艺制造,保证系统的可靠性和稳定性。
包括结构材料选型、组合方式设计、工艺加工等。
四、预期结果经过以上的研究和实验,我们预期将得到以下成果:1. 海洋环境分析与设计参数确定:确定自升式海洋平台升降传动系统的设计参数,包括升降高度、升降速度、承受载荷等。
2. 控制策略研究:针对自升式海洋平台升降传动系统的运动特点,设计出一种适合的控制策略,保证升降过程的控制和稳定。
3. 结构设计与工艺制造:通过分析研究,确定适合自升式海洋平台升降传动系统的结构材料、组合方式设计、制造工艺等,保证系统的可靠性和稳定性。
五、研究方法本研究采用理论分析与数值模拟相结合的方法,具体分为以下几个步骤:1. 理论分析:通过文献查阅和专家咨询等方式,对海洋平台升降传动系统相关的理论知识和现有技术进行分析。
自升式海上钻井平台液压升降系统解析

自升 式 海 上 钻 井 平 台 液 压 升 降 系 统 由一套 独 立 的 液 压 驱动 系 统提 供 动 力 ,确 保 桩 腿 可 克 服泥
土 、砂 石 等 带 来 的 阻 力和 升 降平 台 自身 的 重 力 , 将 桩 腿 插 入 或 拔 离 海床 以及 升 降整 个 平 台 。根 据 平 台升 降工 况 、作 业 工 况 、 自存 工况 、预 压 工 况 的 重量 重心 计 算 及 环 境 载 荷 的 计 算 结 果 ,确 定升 降 系 统 的 正 常升 降 能力 、预 压 升 降能 力 、 船 体 升 降 速 度 。海 上平 台液 压 升 降系 统 设 计 应 满 足 以下 功 能 :确 保 系 统 有 足够 的动 力 克服 泥 土 、砂 石 等 阻 力 与 平 台 自身 的 重 力 ,将 桩 腿 体 插 入 或 拔 离 海
( )上 插销 卸 载 。控 制 主 油缸 继 续缩 回 ,直 2 至 上插 销 纵 向位 置 传 感 器 发 出 信 号 停 止 动 作 。即 上插 销 已经脱 离 桩腿 内孔壁 , 载 荷 已经 全 部 转 移
到下 插销 ;
销 已经 脱 离 桩 腿 内孔 壁 , 载荷 已经 全 部 转 移 到 下 插销。
主 油 缸 为 桩 腿 提 供 主 要 动 力 ,顶 部 与 底 部 分 别 连 接 上 环 梁 和 下环 梁 机 构 。 除此 之 外 在 主 油 缸 上 还 安 装 了位 移 传 感 器 与 行 程 开关 ,协 助 主 油缸 与插 销 油缸 协调 工作 。
销 已经 脱 离 桩腿 内孔 壁 ,载 荷 已经 全 部 转 移 到 上 插销 。 ( )下插 销 拔 出 。控 制 下插 销 油缸 缩 回 ,拔 6 销 到位 后 , 下插 销 水 平 位 置 传 感 器 发 出信 号 , 系 统 自动停 止插 销油 缸动 作 。 ( )重 复步 骤 ( )。 7 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
海上自升式电动升降装置的研究
自升式钻井、采油平台及试油作业平台都有升降装置,它的主要功能是,当自升式平台移位时,通过升降装置把平台升离水面,为海上作业做好准备,作业结束后,再把平台降回水面,升起桩脚,使平台重新恢复成漂浮状态,准备拖航至下一个井位作业。
据1955年至今的统计,在所有海上移动式平台中,自升式平台的事故占全部平台事故损失数量的75%。
分析证明了,自升式平台的事故有一半以上发生在拖航和升降平台的时候。
所以对自升式平台升降系统的设计是至关重要的。
1 升降系统的机构形式
以三角型平台胜利作业一号为例,如图1所示,
在每个角上均有一根三角形桁架型插入式电动单齿条
桩腿。
升降装置的传动部分为齿轮齿条传动方式,它
主要由固定在桩腿上的齿条及固定在船体上的升降船
传动装置—小齿轮、减速箱、电动机和制动器所组成。
每根桩脚有3条齿条各对应有3套升降船装置,
而每套传动装置由一台电动机、一台制动器、一台减速器、一台减速箱和一个小齿轮组成。
这样,每根桩
腿由3X3传动装置,全平台有3根桩脚,共有27套电动升降船传动系统。
每套升降装置电动机的伸出端装有电磁圆盘式制
动器,制动器的制动转矩不小于电动机额定转矩的2倍。
2 升降系统的同步性
每根桩脚腿的3X3台电动机和制动器由同一电源,同一组正、反转接触器供电给9台 并联电动机和制动器,以保证每根桩脚的3套齿轮条传动装置的同步性。
如果3X3台电动机或制动器,由于接触器动作失灵、主触点接触不良或电缆断芯均会 破坏同步性造成整个传动装置的损坏,严重的将会损坏齿轮、齿条。
3 工作过程载荷分析
升降系统各工况负荷状况可根据图2分析如下:
第一工况(0~t1):时间约10min 。
平台开始从浮动状态升船,到平台离开水面为止, 一个小齿轮的受力情况是从空载逐渐加大,最后达到额定负荷,这种工况电动机和小齿轮承受一样负荷,平均值为(890+710+800)/3=800kN 。
第二工况(t1~t2):时间约12min 。
平台从海平面提升至预定升船高度,小齿轮和电动 机一样,平均承受载荷800kN 。
第三工况(t2~t3):时间约2h58min 。
平台开始
进行预压工作,预压负载由海水泵将水打入压载舱
内,所以预压负荷是逐渐加大,小齿轮平均承受最
大负荷达到(1120+960+1040)/3=1040kN ,但是,
此时升船电动机不承受负荷,只是在必要调平时,
才短时开动单桩脚升船电动机,电动机在过载情况
下工作。
第四工况(t3~t4):时间约36h ,平台经过预压
工作后,一般要经过一段时间的稳定,才开始卸去
预压负荷。
在这一工况下,小齿轮承受最大负荷
1040kN ,但是升船电动机不承受负荷。
第五工况(t4~t5):时间约2h30min 。
卸去预压负荷,小齿轮负荷减少到800kN ,升船电动机桩脚平台图1 平台型式示意
图图2 升降系统负荷状况图
不承受负荷。
第六工况(t5~t6):时间约18min。
将平台升高到井下作业时需要的高度,此时小齿轮和电动机均承受800kN负荷。
第七工况(t6~t7):加上井下作业所配工具、管材等可变载荷,此工况可称为井下作业准备工况,小齿轮承受的平均负荷约为800+9596×70%/3=3040kN,此时电动机不承受负荷。
第八工况(t7~t8):井下作业工况。
因作业机位于平台艉部,即接近#2与#3桩脚下,大钩提升负荷按#2、#3桩承受2/3,#1桩腿承受1/3计算,此时#1桩腿小齿轮承受负荷约3040+230=3270kN;#2桩腿小齿轮承受3040+460=3500kN;#3桩脚同样承受3500kN负荷。
平均每根桩脚承受负荷约(3270+3500+3500)=3423kN;#3桩脚同样承受3500kN负荷。
平均每根桩脚承受负荷约(3270+3500+3500)/3=3423kN。
由上面分析可知,升船时升船电动机承受的是重复短时负荷,并且可能在预压调平时过载工作。
4升降功率计算
升船电动率理论值计算
升船时单桩脚所需要的功率可由下式计算:
P s=0.736G v s / 750η1η2
式中:P s为升船时单桩腿所需功率,kW;G为单桩腿承受的负荷,N;v s为升船速度,m/s;η1为升船电动机效率,一般取0.80;η2为机械效率,一般取0.75。
具体到胜利钻井一号平台,升船时,#1桩脚承担的空船重量和可变负荷是8000kN,则举
升功率为:
P s1=0.736×8000×10³×0.305×60-1 / 750×0.8×0.75 =66.51kW
升船电动率实际测算
理论计算与实际消耗功率相差较大,其主要原因是:
(1)主配电屏指示的功率是升船电动机的输出功率,而理论计算是电动机的输出功
率,参考上例计算电动机的输出功率为:
P s1'= P s1/ηd =66.51/0.84=79.18kW
式中:ηd为电动机输出功率效率。
(2)考虑桩腿小齿轮、齿条传动装置机械结构误差、线路损耗,升船功率增加20%。
则有:P s1〃= P s1'(1+20%)= 79.18 ×(1+20%)= 95.02kW
(3)再考虑每台电动机负载不均又增加10%,则升船功率实际测算值为:
P s1'''= P s1〃(1+10%) = 95.02 ×(1+10%)= 104.52kW
升船电功率的理论计算值考虑上述3个因素后其实际测算值比较接近实际消耗的有功功率。
上述测算值可以作为升降船装置电动机容量选择依据。
电动升降船的驱动源一般采用交流三相鼠笼式感
应电动机,通过齿轮齿条的啮合传动,
实际平台或者桩腿的升降运动。
根据所采用电动机的控制方式有交流直接驱动方式和交流变频驱动方式。
胜利钻井一号的电动机的控制方式采用交流变频驱动。
其发电机的额定功率20kW。
额定电压440V,额定频率60Hz,额定转速900r/min,绝缘等级F级,启动转矩是额定转矩的3.07倍,电动机的特性曲线如图3所示。
根据计算,一条桩脚配备的电动机的功率为:
3 × 3 × 20 kW=180kW>104.52kW,满足要求。
功率因数PF
效率EFF
转差率S
电
流
I
图3 升降电动机的特性曲线图
5 降船逆功率分析
降船负功率
在正常情况下降船,升降船电动机通过接
触器通电使电动机反转,在船体自重形成的位
式负载作业下电动机处于再生制动状态,这时
电动机转速已超过同步转速,而把电能反馈回
电动机,这就是所谓“负功率”,也称为“逆
功率”。
图4示出异步电动机再生制动特性。
由于n1>n H ,一般取平台降船速度是升船速度
的 1.05倍,所以降船速度为
0.3048×1.05=0.32m/min 。
降船电动机再生制动
反馈功率“逆功率”计算公式为:
P J = - η1η2 G J v J / 750
式中:P J 为降船时逆功率,kW ;η1为电动机效率,取0.8;η2为机械效率,取0.75;G J 为降船时平台总重量,KN ;v J 为降船速度,m/min 。
#1降船时,空船+可变载荷重量为8000kN ,计算降船逆功功率为:
P 1J = 0.8×0.75×0.736×8000×10³×0.32 / 750×60 = -25.12kW
同理,按升船电功率实际测算方法考虑,则有
P 1J '''=- [P 1J (1+20%)](1+10%)= - [25.13×1.2] ×1.1=-33.15 kW
如果三桩同时降船,则逆功率可达到∑P J 〃= - 91.75 kW
逆功率的吸收
针对降船时产生的逆功率,可根据逆功率的大小而采用不同的方法,一是根据柴油发电 机组的自身逆功率吸收能力,二是安装逆功率吸收装置。
关于柴油发电机组吸收多少逆功率,一般柴油发电机升船厂家不提供这方面的资料,根 据以往的经验,CAT 公司升船的柴油机组成的发电机组,给出可吸收逆功率占额定功率的12%。
胜利一号自升式钻井平台柴油发电机额定功率350kV ·A 、60Hz 、480V ,如按能吸收逆功率为额定功率的10%计算,则两台机组并车能吸收的逆功率最大值为350 kV ·A ×0.8×0.1×2=56kW 。
故在汇流排上增加铸铁电阻作为逆功率吸收装置,在降船时通过逆功率继电器自动投入铸铁电阻将电能变为热能。
图4 电动机的再生动特
性。