基于滚动时域的无人机空战决策专家系统
稀疏奖励下基于课程学习的无人机空战仿真
稀疏奖励下基于课程学习的无人机空战仿真
祝靖宇;张宏立;匡敏驰;史恒;朱纪洪;乔直;周文卿
【期刊名称】《系统仿真学报》
【年(卷),期】2024(36)6
【摘要】针对传统强化学习在空战环境下探索能力差和奖励稀疏的问题,提出了一种基于课程学习的分布式近端策略优化(curriculum learning distributed proximal policy optimization,CLDPPO)强化学习算法。
嵌入包含专家经验知识的奖励函数,设计了离散化的动作空间,构建了局部观测与全局观测分离的演员评论家网络。
通过为无人机制定进攻、防御以及综合课程,让无人机从基本课程由浅入深开始学习作战技能,阶段性提升无人机作战能力。
实验结果表明:以课程学习方式训练的无人机能以一定的优势击败专家系统和主流强化学习算法,同时具有空战战术的自我学习能力,有效改善稀疏奖励的问题。
【总页数】16页(P1452-1467)
【作者】祝靖宇;张宏立;匡敏驰;史恒;朱纪洪;乔直;周文卿
【作者单位】新疆大学电气工程学院;清华大学精密仪器系;清华大学计算机科学技术系
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.稀疏奖励下基于情感的异构多智能体强化学习
2.稀疏奖励下基于强化学习的异构多智能体对抗
3.基于深度强化学习与自学习的多无人机近距空战机动策略生成算法
4.稀疏奖励下多航天器规避决策自学习仿真
5.稀疏奖励下基于强化学习的无人集群自主决策与智能协同
因版权原因,仅展示原文概要,查看原文内容请购买。
智能空战体系下无人协同作战发展现状及关键技术
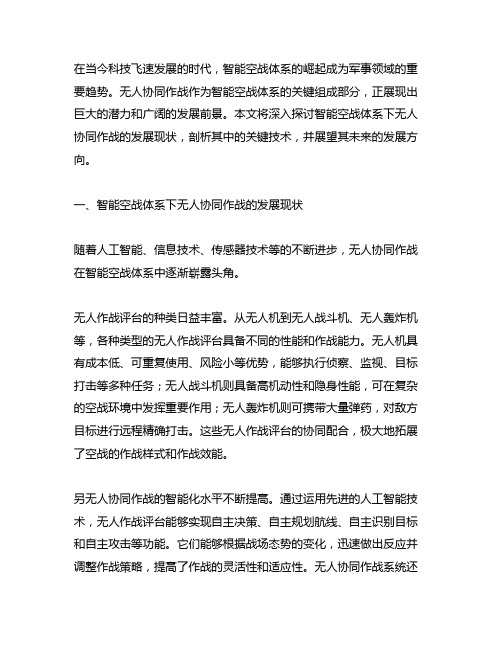
在当今科技飞速发展的时代,智能空战体系的崛起成为军事领域的重要趋势。
无人协同作战作为智能空战体系的关键组成部分,正展现出巨大的潜力和广阔的发展前景。
本文将深入探讨智能空战体系下无人协同作战的发展现状,剖析其中的关键技术,并展望其未来的发展方向。
一、智能空战体系下无人协同作战的发展现状随着人工智能、信息技术、传感器技术等的不断进步,无人协同作战在智能空战体系中逐渐崭露头角。
无人作战评台的种类日益丰富。
从无人机到无人战斗机、无人轰炸机等,各种类型的无人作战评台具备不同的性能和作战能力。
无人机具有成本低、可重复使用、风险小等优势,能够执行侦察、监视、目标打击等多种任务;无人战斗机则具备高机动性和隐身性能,可在复杂的空战环境中发挥重要作用;无人轰炸机则可携带大量弹药,对敌方目标进行远程精确打击。
这些无人作战评台的协同配合,极大地拓展了空战的作战样式和作战效能。
另无人协同作战的智能化水平不断提高。
通过运用先进的人工智能技术,无人作战评台能够实现自主决策、自主规划航线、自主识别目标和自主攻击等功能。
它们能够根据战场态势的变化,迅速做出反应并调整作战策略,提高了作战的灵活性和适应性。
无人协同作战系统还能够与有人驾驶战机进行信息共享和协同作战,实现有人-无人作战的无缝衔接,提升整个空战体系的作战能力。
无人协同作战在实战中的应用也逐渐增多。
一些军事强国已经在局部战争和军事演习中进行了无人协同作战的尝试,并取得了一定的成果。
在某些作战中,无人机被广泛应用于侦察和打击恐怖分子目标;在一些军事演习中,无人作战评台与有人驾驶战机协同进行空战演练,验证了无人协同作战的可行性和有效性。
然而,智能空战体系下无人协同作战的发展也面临着一些挑战。
无人作战评台的自主性能还需要进一步提高。
尽管目前的无人作战评台已经具备一定的自主能力,但在复杂多变的战场环境中,仍然存在自主决策失误、识别目标不准确等问题,需要不断进行技术改进和优化。
无人协同作战系统的通信和数据传输可靠性也是一个关键问题。
基于滚动时域的无人机动态航迹规划
基于滚动时域的无人机动态航迹规划王文彬;秦小林;张力戈;张国华【期刊名称】《智能系统学报》【年(卷),期】2018(13)4【摘要】Using receding horizon control and fast particle swarm optimization(RHC-FPSO),in this paper,we propose an algorithm for unmanned aerial vehicle(UAV)trajectory planning with dynamic constraints.We introduce the cost map method based on the VORONOI graph to estimate the distance from the end point of the trajectory to the target ing the concept of receding horizon control and the artificial potential field method,the path planning problem is transformed into an optimization problem,with the minimum distance and other performance indicators as cost func-tions.We design the evaluation function criteria based on the evaluation criteria and obtain the solution using a particle swarm optimization algorithm with variable weight.To address the problem in which a UAV approaches a danger zone,we introduce a repulsion field into the cost function to ensure safety.The simulation results show that the proposed method can effectively avoid obstacles within the constraint conditions and perform dynamic calculations in a complic-ated environment.%针对带有动力学约束的多旋翼无人机航迹规划问题,提出了一种基于滚动时域控制和快速粒子群优化(RHC-FPSO)方法.该方法引入了基于VORONOI图的代价图方法说明从航迹端点到达目标点的距离估计.根据滚动时域和人工势场法的思想,将路径规划问题转化为优化问题,以最小距离和其他性能指标为代价函数.设计评价函数准则,按照评价准则使用变权重粒子群优化算法求解.针对无人机靠近危险区飞行的问题,将斥力场引入到代价函数中,提升其安全性.仿真实验结果显示,使用文中方法可以有效地在满足约束条件下穿过障碍物区域,以及在复杂环境下可以动态计算.【总页数】10页(P524-533)【作者】王文彬;秦小林;张力戈;张国华【作者单位】中国科学院成都计算机应用研究所,四川成都 610041;中国科学院大学计算机与控制学院,北京100080;中国科学院成都计算机应用研究所,四川成都610041;中国科学院大学计算机与控制学院,北京100080;广州大学智能软件研究院,广东广州 510006;中国科学院成都计算机应用研究所,四川成都 610041;中国科学院大学计算机与控制学院,北京100080;中国科学院成都计算机应用研究所,四川成都 610041;中国科学院大学计算机与控制学院,北京100080【正文语种】中文【中图分类】TP18;V279【相关文献】1.基于改进人工势场法的无人机三维动态环境避障航迹规划 [J], 李克玉;陆永耕;鲍世通;徐培真2.基于RHC-QPSO算法的无人机动态航迹规划 [J], 刘博;王小平;周成;陈勇;周问3.基于改进动态规划的无人机搜寻航迹规划研究 [J], 钱宇;祝祯祎4.基于归一化人工势场算法的固定翼无人机群动态航迹规划 [J], 刘惟恒;郑辛;邓志红5.基于归一化人工势场算法的固定翼无人机群动态航迹规划 [J], 刘惟恒;郑辛;邓志红因版权原因,仅展示原文概要,查看原文内容请购买。
自适应预测权重的空战鲁棒机动决策方法
DING Dali,WEIZhenglei,TANGShangqin,HUANG Changqiang
(犃犲狉狅狀犪狌狋犻犮狊犈狀犵犻狀犲犲狉犻狀犵犆狅犾犾犲犵犲,犃犻狉犉狅狉犮犲犈狀犵犻狀犲犲狉犻狀犵犝狀犻狏犲狉狊犻狋狔,犡犻’犪狀710038,犆犺犻狀犪)
犃犫狊狋狉犪犮狋:Aimingattheproblem ofcloserangeaircombatwithdrasticchangesinaircombatsituation,a robust maneuvering decisionmaking optimization method with adaptivestate prediction weightadjustment mechanismisproposed.Firstly,inordertomaketheunmannedcombatairvehicle(UCAV)robusttothefluc tuationofsituationparameters,arobustsituationfunctionisdesignedtorepresenttheaircombatsituation. Then,aimingattheuncertaintyoftargetmaneuvering,thereachablesettheoryisusedtopredictthemaneuve ringintentionandstateofthetargetinadvance,andtheadaptivepredictionweightcoefficientisusedtoadjust theattackanddefenseoftheUCAV.Finally,theimprovedsymbioticbiologicaloptimizationalgorithmisused tooptimizethemaneuveringdecisioncontrolvariables.ThesimulationresultsshowthattheUCAVcangene rateanidealcloserangeattackoccupationtrajectorybyusingthismethod,andrealizethecloserangeautono mousaircombatattackoccupation.
基于混合策略的UCAV攻击轨迹在线规划方法
(空军工程 大学 航 空航天工程学院 ,陕西 西安 710038)
摘 要 :针对无人作战飞机 (unmanned combat aerial vehicle,UCAV)在线轨迹规划问题 ,提 出了一种基 于混合策略的方法。首先 ,针对动态不确定环境 ,设计 了基于事件触发的轨迹滚动规划方案;其次,基 于 UCAV飞行性 能约束 对数 字地形进行 平 滑 处理 ,生成安 全 可飞行 曲面 ;再 次 ,提 出了利 用 函数 表征 重规划段轨 迹 的方法 ,分析 了轨迹 函数 特性和 端点约束 处理方 法 ,进 而将轨迹 规 划 问题 转化 为轨 迹 函 数寻优问题 ,减少了轨迹寻优参数数量;最后 ,引入平均速度和 FUCH混沌映射对粒子群算法进行改 进 ,并利用其对轨迹函数进行寻优。数字仿真结果表 明,利用该方法完成一次轨迹在线重规划只需 0. 2 s,表明了该方法具有较好的实时性 ,能满足轨迹在线规划要求。
法可分为 2类 :①最优控制法 :将轨迹规划问题转化 为包含微分方程、代数方程和不 等式约束求解泛 函 极值的开环最优控制 问题 ,再 利用解最优控制 的方 法来解算最优攻击轨迹 ,文献 [1]采用了这类方法。 ②可以概括为空间直接法 :利用特定算法 (A 算法、 粒子群算法、进化算法 、概率路 图法 、随机决策树法 等 )直接在轨迹 规划空 间搜索 最优 攻击轨迹点 ,然 后将这些轨迹点连接起来构成攻击轨迹 ,文献 [2—3] 采 用 了这类 方法 。
一种基于距离优先经验回放的无人机空战机动决策方法[发明专利]
![一种基于距离优先经验回放的无人机空战机动决策方法[发明专利]](https://img.taocdn.com/s3/m/e80fa3e76037ee06eff9aef8941ea76e58fa4a70.png)
专利名称:一种基于距离优先经验回放的无人机空战机动决策方法
专利类型:发明专利
发明人:林旺群,田成平,王伟,王锐华,黄其旺,陶蔚,毕华军
申请号:CN202111580695.1
申请日:20211222
公开号:CN114371729A
公开日:
20220419
专利内容由知识产权出版社提供
摘要:一种基于距离优先级约束经验回放方法的无人机空战机动决策方法,包括无人机空战机动仿真预备信息设定步骤,无人机空战机动决策智能体模型构建步骤,无人机空战机动智能体模型训练步骤和多次训练并结束步骤。
本发明相比于现有优先级经验回放方法,改进了计算样本优先级的计算逻辑,引入距离优先级来缓减TD‑error在训练初期的不准确性,使得在训练初期智能体学习时优先选取靠近终止状态的样本,从而避免了智能体在训练初期进行无意义的学习,大大提升了训练效率和样本利用率,减少了训练的时间成本。
申请人:中国人民解放军军事科学院战略评估咨询中心
地址:100091 北京市海淀区厢红旗东门外1号
国籍:CN
代理机构:北京睿派知识产权代理事务所(普通合伙)
代理人:刘锋
更多信息请下载全文后查看。
基于滚动时域估计的高超声速飞行器轨迹跟踪

基于滚动时域估计的高超声速飞行器轨迹跟踪
臧红岩;王凯;高长生;荆武兴;王越欣
【期刊名称】《现代防御技术》
【年(卷),期】2024(52)2
【摘要】针对高超声速飞行器高精度轨迹跟踪问题,提出一种将滚动时域估计与交互式多模型算法相结合的强机动目标轨迹跟踪算法。
给出了半速度系下的高超声速飞行器滑翔段运动模型及量测模型。
利用滚动时域估计方法将状态估计问题转化为有约束的优化问题,并充分考虑飞行器滑翔段物理约束。
在此基础上,为应对目标不同机动模式,借助交互式多模型算法思想建立模型集对其进行近似。
分别在机动模式不变和机动模式突变的情况下对算法进行了验证。
结果表明,新算法采用多个模型并行估计,即时调整模型概率后进行融合输出,能够有效避免目标跟踪模型失配,可显著提高对于高超声速飞行器这类强机动目标的轨迹跟踪精度。
【总页数】13页(P132-144)
【作者】臧红岩;王凯;高长生;荆武兴;王越欣
【作者单位】哈尔滨工业大学航天学院
【正文语种】中文
【中图分类】TJ765
【相关文献】
1.基于LADRC的RBCC高超声速飞行器轨迹跟踪
2.基于气动性能分析的高超声速滑翔飞行器轨迹估计
3.基于高斯伪谱法的高超声速飞行器轨迹优化与跟踪控制
4.
基于MPC的带动力高超声速飞行器轨迹跟踪5.一种弹性高超声速飞行器的轨迹跟踪控制算法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进狼群算法的多无人机协同多目标分配
基于改进狼群算法的多无人机协同多目标分配
周同乐;陈谋;韩增亮;王勤
【期刊名称】《导航定位与授时》
【年(卷),期】2022(9)5
【摘要】针对现代空战多无人机协同多目标任务分配问题,结合标准狼群算法,提出了一种改进狼群算法的多目标任务分配方法。
根据狼群的不同分工以及搜索属性,建立了基于自主游走机制的头狼产生规则、基于多策略知识库的探狼游走机制和基于自适应步长的猛狼奔袭及围攻方式,从而对传统狼群算法的随机性进行智能化约束与控制,以解决多无人机协同多目标任务分配问题。
数值仿真结果表明,该方法能够快速有效获得任务分配方案,避免陷入局部最优。
【总页数】10页(P46-55)
【作者】周同乐;陈谋;韩增亮;王勤
【作者单位】南京航空航天大学自动化学院
【正文语种】中文
【中图分类】V221.3;TB553
【相关文献】
1.基于改进的多目标量子行为粒子群优化算法的多无人机协同任务分配
2.基于多目标优化算法的异构多无人机协同任务分配
3.基于狼群算法的多无人机协同多目标攻防满意决策方法
4.基于狼群算法的多无人机协同多目标攻防满意决策方法
5.基于分解的多目标布谷鸟搜索算法求解多无人机协同任务分配问题
因版权原因,仅展示原文概要,查看原文内容请购买。
基于混合算法的空战机动决策
De c i s i o n — ma ki n g f o r a i r c o m ba t ma ne u v e r i ng b a s e d o n hy b r i d a l g o r i t h m
战斗机探测设备主要包括全向告警器红外探测器雷达等因此探测能力指数主要考虑3种传感器的性能参数探测能力指数表示为犛犇1犠ala2犠rad3犠in12犠alae犇2032犚ala2犠rad0狘犙犐h狘05max狘犙犐v狘05maxe犇2032犚rad狘犙犐h狘05max牔狘犙犐v狘05烅烆烄max犠in0狘犙犐h狘05max狘犙犐v狘05maxe犇2032犚in2狘犙犐h狘05max牔狘犙犐v狘05烅烆烄烅烄烆max13式中犙犐h犙犐v分别为犙犐在水平及垂直方向投影
J u l y 2 0 1 3
网址 : www. s y s — e l e . c o n r
基 于 混 合 算 法 的 空 战机 动 决 策
张 涛 ,于 雷 ,周 中 良 ,王 琳 。
( 1 .空军 工程 大 学航 空航 天工 程 学院 ,陕 西 西安 7 1 0 0 3 8 ;
ZH ANG Ta o ,YU Le i ,ZHOU Zho ng — l i a ng ,W ANG Li n 。 ( 】 .Co l l e g e o f Ae r o n a u t i c s a n d As t r o n a u t i c s En g i n e e r i n g,Ai r Fo r c e En g i n e e r i n g Un i v e r s i t y,Xi ’ a n 7 1 0 0 3 8,C h i n a; 2 .Un i t 9 4 8 3 1 o f t h e PL A ,Wu y i s h a n 3 5 4 3 0 0,Ch i n a;3 . Ar my Av i a t i o n I n s t i t u t e, He a d q u a r t e r s o f t h e Ge n e r a l S t a f f,PLA,Be i j i n g 0 1 1 2 1,C h i n a )
编程驱动的无人机智能任务规划虚拟仿真
编程驱动的无人机智能任务规划虚拟仿真
王鸿鹏;许丽;张晓阳;高振元
【期刊名称】《计算机仿真》
【年(卷),期】2024(41)4
【摘要】将机器人技术与虚拟仿真技术深度融合,设计并开发无人机智能任务规划虚拟仿真系统,实现了无人机的自主起降、路径规划、遍历覆盖、编队协同等任务,与实际实验操作驱动方式一致,实验难度逐层递进、内容丰富完整。
上述系统综合运用了多种软件进行模块化开发,集成了虚拟场景、地理信息、编程驱动、人机交互、数据可视化等要素,具有强交互性、可推演性、科学真实的特点,支持开放式操作和个性化学习,有助于培养学生解决复杂问题的综合能力,是虚拟仿真教学的创新研究成果。
【总页数】5页(P426-430)
【作者】王鸿鹏;许丽;张晓阳;高振元
【作者单位】南开大学人工智能学院;天津瀚海星云数字科技股份有限公司
【正文语种】中文
【中图分类】C642.0;TP391.9
【相关文献】
1.无人机编队协同任务规划仿真系统研究
2.动态环境下的多无人机协同任务规划仿真
3.基于任务驱动的无人机航测数据处理仿真实训
4.多无人机协同空战任务规划仿真系统
5.基于实时飞行仿真的无人机任务规划系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
未知导引律下基于滚动时域控制的规避优化方法
神经网络的趋势是 , 在高维系统 中, 开环最 优轨迹 的过 剩必须离线解算 , 且必须 存储 以便 于神 经 网络参数 的
调整 。由于可能的初始 状 态数量 庞 大而 变得 不可 能 。
在滚动时域控制 中, 当前状态相关 的控 制量在线计算 , 有效地减少 了上述 劣势 。在滚 动时域 控制 方法 中 , 每
中图分类号 : T J 7 6 5 ; E 9 1 l 文献 标 识 码 : A D OI : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3 - 3 8 1 9 . 2 0 1 3 . O 1 . 0 2 7
O p t i ma l E v a s i o n T r a j e c t o r y o f a n U n c e r t a i n G u i d e d A i r
f a c t o r s c a n b e u p d a t e d v i a Re c e d i n g Ho r i z o n Co n t r o 1 .F i n a l l y ,mi s s i l e a v o i d nc a e c a n b e a c c o mp l i s h e d .
Ab s t r a c t :T h e e v a s i o n o f g u i d e d mi s s i l e s i s o f a g r e a t i mp o r t a n c e t o s u r v i v e i n a i r c o mb a t .T h e a c c u r a t e d e c i s i o n o f t h e c o mi n g mi s s i l e g u i d a n c e w i l l ma k e a c o n t i r b u t i o n t o g e t a b e t t e r ma n e n v e r .Th u s ,a n e w me t h o d h a s b e e n p u t f o r wa r d t o s i m— u l a t e t h e a v o i d i n g r o u t e wh e n t h e ui g d a n c e i s u n k n o w n .T h e g u i d a n c e r a t e c a n b e a c q u i r e d b y B a y e s t h r o r e m, a n d t h e c o n t ol r
基于滚动时域优化的无人飞行器轨迹规划
物 。 于混合整数规划的滚动 时域优 化方法用来求解飞行 器的轨迹规 划问题 。 出的仿真结果显示此方法的有效性 以及在复杂环 基 给
境 下 的 可 实 时计 算 性 。 关 键 词 : 动 时域 ; 合 整数 线性 规 划 ; 迹 规 划 ; 人 飞 行 器 滚 混 轨 无 DO :0 7 8 .s.0 2 8 3 。0 8 50 1 文章编号 :0 2 8 3 ( 0 83 — 2 7 0 文献标识码 : 中图分类号 :P 3 I 1 . 7 /i n10 — 3 1 0 . . 3 js 2 3 7 10 — 3 12 0 )5 0 3 — 3 A T 1
C m ue ni ei n p l aos计算机 工程 与应用 o p trE gn r g a dA pi t n e n规划
张 胜祥 , 海龙 , 裴 刘保 罗 , 坚 强 李
ZHANG S e g xa g P i ln , I o lo L in qa g h n — in , EIHa- o g L U Ba — u , IJa — in
Ke o d :rcdn oi n mx d it e ierporm n ;aet 1nig u m n e eil y w rs eeig hr o ; i -ne rl a rga migt jc r pa nn ;n a nd vhc s z e g n r o y e
摘
要 : 出了寻求无人飞行 器的最优轨迹 的一种方法 , 给 其问题描 述为使飞行器从初始状 态飞行到 目标状 态, 同时避免撞 到障碍
t e a p o c s e fc ie a d i r a - i o u ai n l r c a l n a c mp e n i n n . h p ra h i f t n s e lt e v me e mp tt al t tb e i o l x e vr me t o y a o
基于数字地图的亚音速飞行器最优地形跟随
投 稿 网 址 :www.jsjclykz.com
Copyright©博看网 . All Rights Reserved.
· 96 ·
计算机测量与控制
第 29 卷
图1 地 形 跟 随 系 统 结 构 图
忽略机体狔 轴所受的力以及滚转、偏航力矩,其纵向运动 方 程 为[12 : 13]
误差,反映系统对参考轨迹的跟随要求,第二项反映对控
制量平稳变化的要求,避免控制量变化过大。整个表达式
的目标就是在未来有限时域内使飞行器能够尽快且平稳地
跟踪参考航迹,同时稳定速度。
由图3可 知,为 了 达 到 控 制 目 标, 正 确 选 取 预 测 时 域
内的参考航迹点犱 是提高控制器性能的关键,本文根据当
前位置 狆(犽)和 速 度 矢 量 犞(犽),使 用 欧 拉 法 对 未 来 的 位 置 狆(犽+犻)进 行 预 测 , 并 在 惯 性 系 下 定 义 未 来 有 限 时 域 内 的 参 考航迹点,如 图 4 所 示。这 种 方 法 的 思 想 来 源 于 驾 驶 员 对
车辆的操 纵:驾 驶 员 总 是 相 对 于 车 辆 纵 轴 来 预 判 未 来 的
2 航 迹 跟 踪 控 制 器 设 计
21 控 制 目 标 根据1.2节 的 讨 论,航 迹 控 制 的 目 标 是 最 小 化 控 制 输
入与跟踪误差:
犖狆
犖犮
∑ ∑ 犑 =
狉(犽+犻)-^狔(犽+犻)2 犙 Nhomakorabea+
Δ狌(犽+犼-1)
2 犚
犻=1
犼=1
(6)
式中,犽 表示当前采样 时 刻,犖狆、犖犮 分 别 为 预 测 时 域 和 控 制 时 域,^狔(犽+犻)是预测输出,Δ狌 是控制增量,犙、犚 分别是跟 踪误差与控制输入的正 定 加 权 矩 阵,狉(犽+犻)为 参 考 值。该 目标函数的第一项用于最小化航迹倾斜、高度与速度大小
基于滚动时域控制的战斗机空战机动决策
基于滚动时域控制的战斗机空战机动决策
付昭旺;李战武;强晓明;徐安
【期刊名称】《电光与控制》
【年(卷),期】2013(020)003
【摘要】采用滚动时域控制(Receding Horizon Control,RI-IC)方法对空战机动决策进行建模研究.首先,基于空战态势和战斗机作战能力给出探测优势和攻击优势的集合描述,并建立定量评估函数,得到机动决策的目标集;其次,综合考虑战斗机的战术优势、机动时间和控制损耗构建了决策指标函数;然后,基于直接多重打靶法给出其数值求解方法.仿真结果表明:基于RHC的机动决策方法能够在规避目标威胁的情况下,有效地达成攻击条件.
【总页数】6页(P20-24,29)
【作者】付昭旺;李战武;强晓明;徐安
【作者单位】空军工程大学航空航天工程学院,西安710038;空军工程大学航空航天工程学院,西安710038;空军沈阳航空装备训练基地西宁训练大队,西宁810006;空军工程大学航空航天工程学院,西安710038
【正文语种】中文
【中图分类】V271.4;TP273
【相关文献】
1.基于多模型与滚动时域估计的机动目标跟踪算法 [J], 焦志强;李卫华;王鹏
2.基于滚动时域的无人机动态航迹规划 [J], 王文彬;秦小林;张力戈;张国华
3.基于强化遗传算法的无人机空战机动决策研究 [J], 谢建峰;杨啟明;戴树岭;王婉扬;张建东
4.基于深度随机博弈的近距空战机动决策 [J], 马文;李辉;王壮;黄志勇;吴昭欣;陈希亮
5.基于模糊推理的无人战斗机视距空战机动决策 [J], 吴傲;杨任农;梁晓龙;张佳强因版权原因,仅展示原文概要,查看原文内容请购买。
用于卫星定点保持机动的专家系统
用于卫星定点保持机动的专家系统
Sto.,JLJ;李纲
【期刊名称】《飞行器测控学报》
【年(卷),期】1989(000)003
【总页数】1页(P53)
【作者】Sto.,JLJ;李纲
【作者单位】不详;不详
【正文语种】中文
【中图分类】V448.22
【相关文献】
1.基于组合机动的共面绕飞卫星队形保持研究 [J], 刘光明;文援兰;杨雪榕;廖瑛
2.用于卫星长期管理的专家系统 [J], 穆鸿飞;李于衡;郭义琪
3.用于卫星轨道保持的专家系统 [J], Meka.,MM;冯健翔
4.卫星空间位置保持的专家系统 [J], Meka.,MM;周双印
5.三轴稳定同步卫星定点保持控制效果快速评估算法 [J], 李本津;郑军;陈宏
因版权原因,仅展示原文概要,查看原文内容请购买。
新一代战斗机机动作战决策与仿真
新一代战斗机机动作战决策与仿真
叶茂林;申功璋
【期刊名称】《北京航空航天大学学报》
【年(卷),期】2003(029)004
【摘要】近距空战要求新一代战斗机具有较好的机动性能.根据基本的空战机动模式进行机动作战决策的建模,在综合飞行/火力/推进分布式计算机实时仿真系统中,运用大机动非线性鲁棒飞行控制律进行了典型的机动作战仿真.仿真结果表明,具有大机动性能的飞机在空战过程中显示出了很好的效益优势.
【总页数】4页(P358-361)
【作者】叶茂林;申功璋
【作者单位】北京航空航天大学,自动化科学与电气工程学院;北京航空航天大学,自动化科学与电气工程学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.战斗机突击作战实时辅助决策研究 [J], 陈中起;于雷;隋永华;周中良
2.空中作战智能决策与无人战斗机智能化 [J], 董彦非
3.空情仿真中战斗机侧向战术机动飞行仿真 [J], 吴达;王润孝;孙逊;章卫国;谢一静
4.空中作战智能决策与无人战斗机智能化 [J], 董彦非;
5.新一代F-22战斗机作战特性 [J], 田晓阳
因版权原因,仅展示原文概要,查看原文内容请购买。