永磁同步电机系统仿真
MATLABSIMULINK永磁同步电机矢量控制系统仿真
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
matlab中关于永磁同步电机的仿真例子
matlab中关于永磁同步电机的仿真例子摘要:一、Matlab中永磁同步电机仿真概述二、永磁同步电机仿真模型建立1.参数设置2.控制器设计3.仿真结果分析三、SVPWM算法在永磁同步电机仿真中的应用四、案例演示:基于DSP28035的永磁同步电机伺服系统MATLAB仿真五、总结与展望正文:一、Matlab中永磁同步电机仿真概述Matlab是一款强大的数学软件,其在电机领域仿真中的应用广泛。
永磁同步电机(PMSM)作为一种高效、高性能的电机,其控制策略和性能分析在Matlab中得到了充分的体现。
利用Matlab进行永磁同步电机仿真,可以有效验证控制策略的正确性,优化电机参数,提高系统性能。
二、永磁同步电机仿真模型建立1.参数设置:在建立永磁同步电机仿真模型时,首先需要设定电机的各项参数,如电阻、电感、永磁体磁链等。
这些参数可以根据实际电机的设计值进行设置,以保证模型与实际电机的特性一致。
2.控制器设计:控制器的设计是电机仿真模型的核心部分。
常见的控制器设计包括矢量控制(也称为场导向控制,Field-Oriented Control, FOC)、直接转矩控制(Direct Torque Control, DTC)等。
在Matlab中,可以利用现有的工具箱(如PMSM T oolbox)方便地进行控制器的设计和仿真。
3.仿真结果分析:在完成控制器设计后,进行仿真实验。
通过观察电机的转速、电流、转矩等参数的变化,可以评估控制器的性能。
同时,可以利用Matlab的图像绘制功能,将仿真结果以图表的形式展示,便于进一步分析。
三、SVPWM算法在永磁同步电机仿真中的应用SVPWM(Space Vector Pulse Width Modulation)是一种用于控制永磁同步电机的有效方法。
通过在Matlab中实现SVPWM算法,可以方便地对比不同控制策略的性能。
在仿真过程中,可以观察到SVPWM算法能够有效提高电机的转矩波动抑制能力,减小电流谐波含量,从而提高电机的运行效率。
永磁同步电机矢量控制matlab仿真

永磁同步电机矢量控制matlab仿真永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的矢量控制(也称为场向量控制或FOC)是一种先进的控制策略,用于优化电机的性能。
这种控制方法通过独立控制电机的磁通和转矩分量,实现了对电机的高性能控制。
在MATLAB中,你可以使用Simulink和SimPowerSystems库来模拟永磁同步电机的矢量控制。
以下是一个基本的步骤指南:1.建立电机模型:使用SimPowerSystems库中的Permanent Magnet SynchronousMachine模型。
你需要为电机提供适当的参数,如额定功率、额定电压、额定电流、极对数、转子惯量等。
2.建立控制器模型:矢量控制的核心是Park变换和反Park变换,用于将电机的定子电流从abc坐标系变换到dq旋转坐标系,以及从dq坐标系变换回abc坐标系。
你需要建立这些变换的模型,并设计一个适当的控制器(如PI控制器)来控制dq轴电流。
3.建立逆变器模型:使用SimPowerSystems库中的PWM Inverter模型。
这个模型将控制器的输出(dq轴电压参考值)转换为逆变器的开关信号。
4.连接模型:将电机、控制器和逆变器连接起来,形成一个闭环控制系统。
你还需要添加一个适当的负载模型来模拟电机的实际工作环境。
5.设置仿真参数并运行仿真:在Simulink的仿真设置中,你需要设置仿真时间、步长等参数。
然后,你可以运行仿真并观察结果。
6.分析结果:你可以使用Scope或其他分析工具来查看电机的转速、定子电流、电磁转矩等性能指标。
这些指标可以帮助你评估控制算法的有效性。
请注意,这只是一个基本的指南,具体的实现细节可能会因你的应用需求和电机参数而有所不同。
在进行仿真之前,建议你仔细阅读相关的文献和教程,以便更好地理解永磁同步电机的矢量控制原理。
基于PSIM永磁同步电机矢量控制系统的仿真建模
U q 子模块的底层结构如图 6 所示。 的底层结构如图 5 所示,
将式(2)和式(3)代入式(1),得到电压方程为
0 ua r 0 0 ia L − M u = 0 r 0 ⋅ i + 0 L−M b b uc 0 0 r ic 0 0 i a ea p i + e b b ic ec L − M 0 0
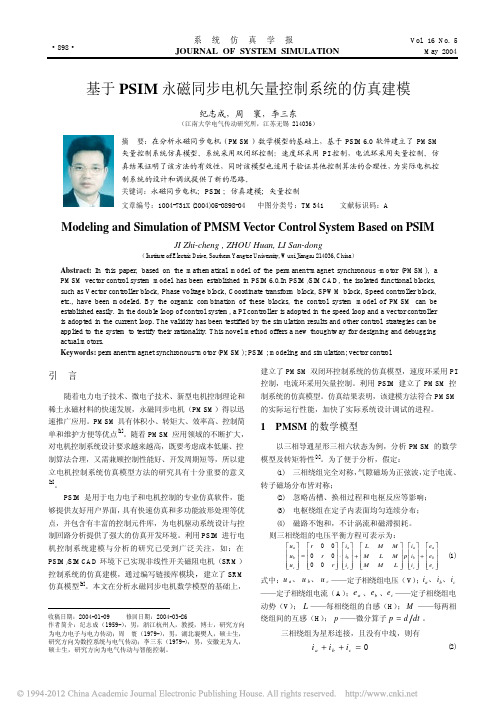
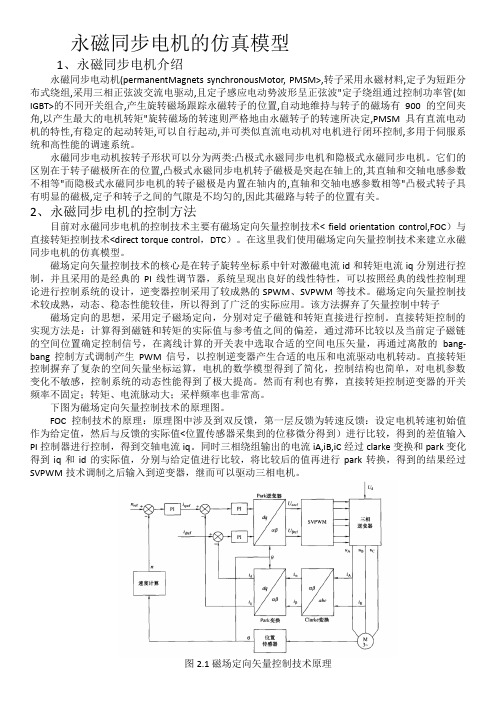
ω m_ ref 速度控 I q_ref + 制器 -I d_ ref q 相电流控制器 d 相电流控制器 - Uq dq 2abc Ud Ua Ub Uc SPWM SPWM SPWM Ia Ib Ic 实际转速w m 逆变 器 PMSM
wm
+
Id abc 2dq Iq
图1
PMSM 控制系统仿真建模组成框图
Abstract: In this paper, based on the mathematical model of the permanent-magnet synchronous–motor (PMSM), a PMSM vector control system model has been established in PSIM6.0.In PSIM/SIMCAD, the isolated functional blocks, such as Vector controller block, Phase voltage block, Coordinate transform block, SPWM block, Speed controller block, etc., have been modeled. By the organic combination of these blocks, the control system model of PMSM can be established easily. In the double loop of control system, a PI controller is adopted in the speed loop and a vector controller is adopted in the current loop. The validity has been testified by the simulation results and other control strategies can be applied to the system to testify their rationality. This novel method offers a new thoughtway for designing and debugging actual motors. Keywords: permanent-magnet synchronous-motor (PMSM); PSIM; modeling and simulation; vector control
基于matlab的永磁同步电机调速系统的仿真
1. 1 研究背景及意义 1. 1. 1 研究背景 1. 1. 2 研究的目的及意义
1. 2 国内外研究现状
. .... .. .... ... .. .. .. .... ... .. .. .. I I I
..•...... ... .. .. .•.... ... .. .. .•..1
求的控制策略进行相关的条件给予模拟 , 实验的研究。
以代曾以往只能在实际硬件 中 进行调试
1. 2 国内外研究现状
1.2.1 国内研究历史及现状
我 国从 20 世纪 70 年代开始跟踪开发交流伺服技术,主要研究力量集中在高 等院校和科研单位 , 以军工 、 宇航卫 星 为主要应用方向 。 主要研究机构是北 京机
5. 1 全文总结
参考文献
致谢
-…
… … … . . . . . . . . . . . 31
. . . . . . . . . . . 33
. .. . . . . . . . . . . . . . . ..…
IV
第一章绪论 1.1研究背景及意义
1.1.1研究背景
随着电力电子技术、微电子技术和现代电机控制理论的发展 , 交流调速系统 逐步具备了宽谓速范围、高稳速精度、快速'i;lJ 态响应及四象限运行等良好的技术 性能,交流调速系统应用越来越广泛臼而永磁同步电机调速系统能使电机的功率 因数更高、转子参数变的可测、效率更高等特点 , 近年来永磁同步电机调速系统
1088 ,
experi mensbut it is undesirable , because it often cause some cycle is longer
00
and the feedback
基于MATLAB永磁同步电动机矢量控制系统的仿真研究

基于MATLAB永磁同步电动机矢量控制系统的仿真研究永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)是一种应用广泛的高性能电机。
在工业领域,PMSM通常采用矢量控制方法来实现精确的速度和位置控制。
本文基于MATLAB对PMSM矢量控制系统进行仿真研究,探讨其工作原理及性能。
首先,PMSM的矢量控制系统由控制器、电机和传感器三部分组成。
其中,控制器根据电机的反馈信号和期望输出来计算电机的控制信号。
传感器用于测量电机的转速、位置和电流等参数,反馈给控制器。
通过调节控制信号,控制器可以实现电机的速度和位置控制。
在PMSM的矢量控制系统中,通常采用dq轴矢量控制方法,将三相电流转换为直流参考轴和旋转参考轴的dq坐标系,进而对电机进行控制。
其次,本文利用MATLAB软件对PMSM矢量控制系统进行了仿真实验。
首先,建立了PMSM电机的数学模型,包括电机的动态方程、反电动势方程和电流方程。
然后,在MATLAB环境中编写程序,实现电机模型的数值求解和控制算法的计算。
通过调节控制参数,可以对电机的速度和位置进行精确控制,并实时监测电机的工作状态。
在仿真实验中,通过改变电机的负载情况、工作电压和控制参数等条件,分析了PMSM矢量控制系统的性能。
实验结果表明,当负载增加时,电机的转动惯量增大,控制系统的响应时间变长,但依然可以实现精确的速度和位置控制。
当电机的工作电压增加时,电机的输出功率和转速增大,但也会产生更大的电流和损耗。
当控制参数的比例增益和积分时间常数变化时,系统的稳定性和动态性能均会受到影响,需要进行合理的调节。
总结起来,本文基于MATLAB对PMSM矢量控制系统进行了仿真研究,探讨了其控制原理和性能。
通过仿真实验,可以深入理解PMSM矢量控制系统的工作原理,优化系统的参数和性能,并为实际应用提供参考。
基于模糊PID控制的永磁同步电动机控制系统设计与仿真分析

基于模糊PID控制的永磁同步电动机控制系统设计与仿真分析1 引言永磁同步电机(PMSM)具有强耦合、参数时变、非线性等特点,且系统运行时受到不同程度的干扰,因此很难满足现代工业对高性能PMSM伺服系统的控制要求,尤其在精度、可靠性等性能上。
PMSM伺服系统是一个包含电流(转矩)环、速度环和位置环的三闭环控制系统。
采用矢量控制可改善系统内部电流(转矩)环的性能囝。
位置环和速度环实现系统的精确定位和对输入信号的快速跟踪。
速度控制器研究较多的控制策略有神经网络控制、滑模变结构控制、多种控制策略的复合控制等。
其算法都比较复杂,不利于电机数字化控制的实时性。
模糊控制采用以系统误差和误差变化为输入语句变量的二维模糊控制器结构形式,能够处理受控对象的不确定特性,具有实现方法简易、运算快速、实时性强等特点,系统能够获得良好的动态特性.但静态特性不能令人满意。
将模糊控制与PID控制相结合,设计模糊PID速度控制器,使系统既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点。
系统仿真及实验结果表明该控制策略具有良好的控制效果。
2 模糊PID控制器的设计2.1 控制器结构设计应用于速度环的模糊PID控制器采用广泛应用的二维模糊控制器,其一个输入变量是电机输出转速反馈值与给定转速间的误差E。
另一个输入变量是转速误差的变化率EC,即单位时间内转速误差的差值。
输出端设计为多输出,由于模糊PID控制器是在传统PID 控制的基础上加入了模糊控制,故只需在传统PID调节参数的基础上稍作修正即可,于是取传统PID控制器的3个参数P,I,D的修正值△Kp,△Ki;△Kd作为模糊控制器的输出。
2.2 确定隶属度函数记E,EC,△Kp,△Ki,△Kd的模糊变量为e,ec,kp,ki,kdo如模糊子集为(NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。
选择输入量e,ec隶属度函数为高斯型。
(完整word版)开题报告:永磁同步电机控制系统仿真

1. 课题背景及意义1.1课题研究背景、目的及意义近年来, 随着电力电子技术、微电子技术、微型计算机技术、传感器技术、稀土永磁材料与电动机控制理论的发展, 交流伺服控制技术有了长足的进步, 交流伺服系统将逐步取代直流伺服系统, 借助于计算机技术、现代控制理论的发展, 人们可以构成高精度、快速响应的交流伺服驱动系统。
因此, 近年来, 世界各国在高精度速度和位置控制场合, 己经由交流电力传动取代液压和直流传动[1][2]。
二十世纪八十年代以来, 随着价格低廉的钕铁硼(REFEB)永磁材料的出现, 使永磁同步电机得到了很大的发展, 世界各国(以德国和日本为首)掀起了一股研制和生产永磁同步电机及其伺服控制器的热潮, 在数控机床、工业机器人等小功率应用场合, 永磁同步电机伺服系统是主要的发展趋势。
永磁同步电机的控制技术将逐渐走向成熟并日趋完善[3]。
以往同步电机的概念和应用范围己被当今的永磁同步电机大大扩展。
可以毫不夸张地说, 永磁同步电机已在从小到大, 从一般控制驱动到高精度的伺服驱动, 从人们日常生活到各种高精尖的科技领域作为最主要的驱动电机出现, 而且前景会越来越明显。
由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低, 易于散热及维护等优点, 特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现, 在中小功率、高精度、高可靠性、宽调速范围的伺服控制系统中, 永磁同步电动机引起了众多研究与开发人员的青睐, 其应用领域逐步推广, 尤其在航空航天、数控机床、加工中心、机器人等场合获得广泛的应用[4][5]。
尽管永磁同步电动机的控制技术得到了很大的发展, 各种控制技术的应用也在逐步成熟, 比如SVPWM、DTC、SVM、DTC自适应方法等都在实际中得到应用。
然- 1 -而, 在实际应用中, 各种控制策略都存在着一定的不足, 如低速特性不够理想, 过分依赖于电机的参数等等。
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真一、本文概述随着电力电子技术和控制理论的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、风力发电、机器人和工业自动化等领域得到了广泛应用。
然而,PMSM的高性能运行依赖于先进的控制系统,其中矢量控制(Vector Control, VC)是最常用的控制策略之一。
矢量控制,也称为场向量控制,其基本思想是通过坐标变换将电机的定子电流分解为与磁场方向正交的两个分量——转矩分量和励磁分量,并分别进行控制,从而实现电机的高性能运行。
这种控制策略需要对电机的动态行为和电磁关系有深入的理解,并且要求控制系统能够快速、准确地响应各种工况变化。
MATLAB/Simulink/SimPowerSystems是MathWorks公司开发的一套强大的电力系统和电机控制系统仿真工具。
通过Simulink的图形化建模环境和SimPowerSystems的电机及电力电子元件库,用户可以方便地进行电机控制系统的建模、仿真和分析。
本文旨在介绍基于MATLAB/Simulink/SimPowerSystems的永磁同步电机矢量控制系统的建模与仿真方法。
将简要概述永磁同步电机的基本结构和运行原理,然后详细介绍矢量控制的基本原理和坐标变换方法。
接着,将通过一个具体的案例,展示如何使用Simulink和SimPowerSystems进行永磁同步电机矢量控制系统的建模和仿真,并分析仿真结果,验证控制策略的有效性。
将讨论在实际应用中可能遇到的挑战和问题,并提出相应的解决方案。
通过本文的阅读,读者可以对永磁同步电机矢量控制系统有更深入的理解,并掌握使用MATLAB/Simulink/SimPowerSystems进行电机控制系统仿真的基本方法。
永磁同步电机控制方法建模与仿真研究
永磁同步电机控制方法建模与仿真研究1. 本文概述本文旨在探讨永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的控制方法建模与仿真研究。
永磁同步电机作为现代电力驱动系统中的重要组成部分,其性能优越、控制精度高等特点使得它在电动汽车、风力发电、工业机器人等领域得到广泛应用。
随着科学技术的不断进步,对永磁同步电机的控制方法提出了更高的要求,对其进行深入研究和优化具有重要意义。
本文首先介绍了永磁同步电机的基本原理和结构特点,为后续的控制方法建模提供理论基础。
接着,文章重点阐述了永磁同步电机的控制方法,包括矢量控制、直接转矩控制等,并分析了各种控制方法的优缺点。
在此基础上,文章提出了一种基于模型预测控制的永磁同步电机控制策略,并通过仿真实验验证了该控制策略的有效性和优越性。
为了更好地理解和分析永磁同步电机的动态性能和控制效果,本文建立了永磁同步电机的数学模型,并利用MATLABSimulink等仿真工具进行了仿真研究。
仿真结果展示了不同控制方法下永磁同步电机的运行状态和性能表现,为实际工程应用提供了有益的参考。
本文通过对永磁同步电机的控制方法建模与仿真研究,深入探讨了永磁同步电机的控制策略和优化方法,为永磁同步电机的进一步应用和发展提供了理论支持和技术指导。
2. 永磁同步电机基本原理永磁同步电机(PMSM)是一种高效、高性能的电机,广泛应用于各种工业控制系统和电动汽车等领域。
其基本原理基于电机内部磁场与电流之间的相互作用,通过控制电机定子电流来实现对电机转速和转矩的精确控制。
PMSM的核心组成部分包括定子、转子和永磁体。
定子通常由多个线圈组成,这些线圈在通电时产生磁场。
转子则装配有永磁体,这些永磁体产生恒定的磁场。
当定子通电产生的磁场与转子永磁体磁场相互作用时,会产生转矩,进而驱动转子旋转。
PMSM的一个重要特性是其同步性,即电机转速与电源频率之间保持严格的同步关系。
永磁同步电机系统仿真

转矩与电流成正比关系 永磁同步电机系统的转矩与电流的相位差有关 转矩和电流的调节可以通过控制算法实现 了解转矩和电流的关系有助于优化电机性能
电压方程:描述电机的电压与 电流之间的关系
磁链方程:描述电机的磁链与 电流和磁通之间的关系
转矩方程:描述电机的转矩与 电流和磁通之间的关系
运动方程:描述电机的转速与 转矩和电机参数之间的关系
添加标题
常见仿真软件:ANSYS Maxwell、COMSOL Multiphysics、FEMM等
添加标题
适用场景:ANSYS Maxwell适用于电磁场仿真,COMSOL Multiphysics适用于多物理场耦合仿真,FEMM 适用于电机电磁场仿真
添加标题
精度和稳定性:ANSYS Maxwell和COMSOL Multiphysics精度较高,稳定性较好,而FEMM适用于简单模 型仿真,精度和稳定性相对较低
永磁同步电机系统 仿真的应用和发展 趋势
工业自动化:用于控制机器人、自动化生产线等 新能源汽车:作为驱动电机,提高能效和性能 航空航天:用于控制无人机、卫星等高精度设备 医疗器械:用于精密手术器械的控制和操作
添加 标题
高效能:随着技术的进步,永磁同步电机系统 的仿真将更加高效,能够更快地得到精确的结 果。
永磁同步电机系统 的仿真软件
Simulink:用于动态系统建模和仿真,支持多种永磁同步电机模型 FEMTO-ST MCU:专门用于电机控制系统的仿真,包括永磁同步电机 dSPACE:实时仿真系统,可用于永磁同步电机控制算法的验证 MATLAB/Simulink:电机控制系统设计和分析工具,适用于永磁同步电机仿真
永磁同步电机系统仿 真
汇报人:XX
目录
matlab中关于永磁同步电机的仿真例子

matlab中关于永磁同步电机的仿真例子摘要:一、永磁同步电机的基本概念和特点二、MATLAB 仿真在永磁同步电机中的应用三、永磁同步电机MATLAB 仿真模型的构建与参数设置四、永磁同步电机MATLAB 仿真结果与分析五、永磁同步电机MATLAB 仿真的意义与应用前景正文:一、永磁同步电机的基本概念和特点永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)是一种采用永磁材料作为磁场源的同步电机。
与传统的同步电机相比,永磁同步电机具有以下特点:1.结构简单:永磁同步电机取消了传统的磁场电流,使得其结构更加简单,运行更加可靠。
2.效率高:永磁同步电机的磁场是由永磁材料产生的,因此不存在磁场电流引起的损耗,使得其效率较高。
3.调速性能好:永磁同步电机的转速与电源频率保持同步,可以通过改变电源频率实现调速。
二、MATLAB 仿真在永磁同步电机中的应用MATLAB 是一种广泛应用于科学计算和工程设计的软件,其强大的仿真功能为永磁同步电机的研究和应用提供了便利。
通过MATLAB 仿真,可以对永磁同步电机的运行特性、控制策略等进行深入研究,为实际应用提供理论依据。
三、永磁同步电机MATLAB 仿真模型的构建与参数设置在MATLAB 中,可以通过Simulink 工具构建永磁同步电机的仿真模型。
具体步骤如下:1.打开Simulink 软件,创建一个新的模型。
2.从Simulink 库中添加永磁同步电机的物理部件,包括电机本体、转速传感器、电流传感器等。
3.配置永磁同步电机的参数,包括电机的额定功率、额定转速、永磁材料性能等。
4.搭建永磁同步电机的控制电路,包括逆变器、调制器、控制器等。
5.编写永磁同步电机的控制策略,包括矢量控制、直接转矩控制等。
6.配置仿真参数,如仿真时间、仿真步长等。
7.运行仿真模型,观察永磁同步电机的运行状态和性能指标。
四、永磁同步电机MATLAB 仿真结果与分析通过MATLAB 仿真,可以得到永磁同步电机的转速、电流、电压等运行状态,以及电机的效率、功率因数等性能指标。
基于Matlab的永磁同步电机矢量控制系统仿真研究
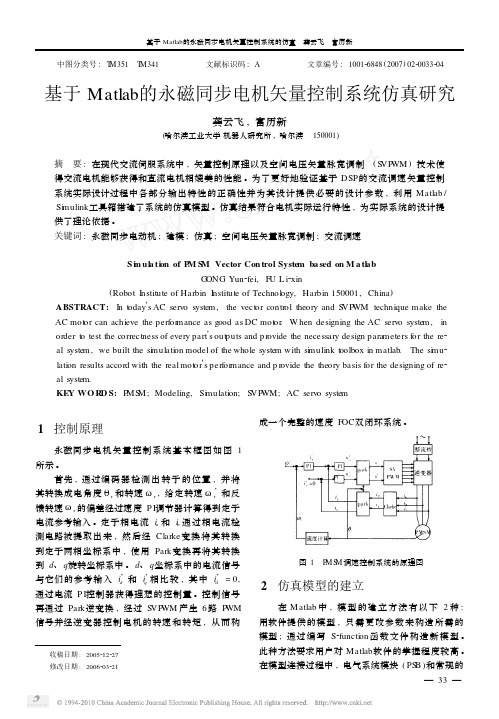
中图分类号:T M351 T M341 文献标识码:A 文章编号:100126848(2007)022*******基于Matlab 的永磁同步电机矢量控制系统仿真研究龚云飞,富历新(哈尔滨工业大学机器人研究所,哈尔滨 150001)摘 要:在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(S VP WM )技术使得交流电机能够获得和直流电机相媲美的性能。
为了更好地验证基于DSP 的交流调速矢量控制系统实际设计过程中各部分输出特性的正确性并为其设计提供必要的设计参数,利用Matlab /Si m ulink 工具箱搭建了系统的仿真模型。
仿真结果符合电机实际运行特性,为实际系统的设计提供了理论依据。
关键词:永磁同步电动机;建模;仿真;空间电压矢量脉宽调制;交流调速S i m ul a ti on of P M S M Vector Con trol Syste m ba sed on M a tl abG ONG Yun 2fei,F U L i 2xin(Robot I nstitute of Harbin I nstitute of Technol ogy,Harbin 150001,China )ABSTRACT:I n t oday πs AC servo syste m ,the vect or contr ol theory and S VP WM technique make the AC mot or can achieve the perfor mance as good as DC mot or .W hen designing the AC servo syste m ,in order t o test the correctness of every part πs out puts and p r ovide the necessary design para meters f or the re 2al syste m ,we built the si m ulati on model of the whole syste m with si m ulink t oolbox in matlab .The si m u 2lati on results accord with the real mot or πs perf or mance and p r ovide the theory basis for the designing of re 2al syste m.KEY WO R D S:P MS M;Modeling,Si m ulati on;S VP WM;AC servo syste m收稿日期:2005212227修改日期:20062032211 控制原理永磁同步电机矢量控制系统基本框图如图1所示。
永磁同步电机仿真模型
永磁同步电机的仿真模型1、永磁同步电机介绍永磁同步电动机(permanentMagnets synchronousMotor, PMSM>,转子采用永磁材料,定子为短距分布式绕组,采用三相正弦波交流电驱动,且定子感应电动势波形呈正弦波"定子绕组通过控制功率管(如IGBT>的不同开关组合,产生旋转磁场跟踪永磁转子的位置,自动地维持与转子的磁场有900的空间夹角,以产生最大的电机转矩"旋转磁场的转速则严格地由永磁转子的转速所决定,PMSM具有直流电动机的特性,有稳定的起动转矩,可以自行起动,并可类似直流电动机对电机进行闭环控制,多用于伺服系统和高性能的调速系统。
永磁同步电动机按转子形状可以分为两类:凸极式永磁同步电机和隐极式永磁同步电机。
它们的区别在于转子磁极所在的位置,凸极式永磁同步电机转子磁极是突起在轴上的,其直轴和交轴电感参数不相等"而隐极式永磁同步电机的转子磁极是内置在轴内的,直轴和交轴电感参数相等"凸极式转子具有明显的磁极,定子和转子之间的气隙是不均匀的,因此其磁路与转子的位置有关。
2、永磁同步电机的控制方法目前对永磁同步电机的控制技术主要有磁场定向矢量控制技术< field orientation control,FOC)与直接转矩控制技术<direct torque control,DTC)。
在这里我们使用磁场定向矢量控制技术来建立永磁同步电机的仿真模型。
磁场定向矢量控制技术的核心是在转子旋转坐标系中针对激磁电流id和转矩电流iq分别进行控制,并且采用的是经典的PI线性调节器,系统呈现出良好的线性特性,可以按照经典的线性控制理论进行控制系统的设计,逆变器控制采用了较成熟的SPWM、SVPWM等技术。
磁场定向矢量控制技术较成熟,动态、稳态性能较佳,所以得到了广泛的实际应用。
该方法摒弃了矢量控制中转子磁场定向的思想,采用定子磁场定向,分别对定子磁链和转矩直接进行控制。
基于Matlab的永磁同步电机矢量控制系统仿真研究

基于Matlab的永磁同步电机矢量控制系统仿真研究一、本文概述随着电机控制技术的快速发展,永磁同步电机(PMSM)因其高效率、高功率密度和优良的调速性能,在众多工业领域得到了广泛应用。
为了充分发挥永磁同步电机的性能优势,需要对其进行精确的控制。
矢量控制作为一种先进的电机控制策略,能够实现对电机转矩和磁链的独立控制,从而提高电机的动态和稳态性能。
对基于Matlab的永磁同步电机矢量控制系统进行仿真研究,对于深入理解电机控制原理、优化控制系统设计以及推动电机控制技术的发展具有重要意义。
本文旨在通过Matlab仿真平台,构建永磁同步电机的矢量控制系统模型,并对其进行仿真分析。
文章将介绍永磁同步电机的基本结构和工作原理,为后续的控制系统设计奠定基础。
接着,将详细阐述矢量控制的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,文章将构建基于Matlab的永磁同步电机矢量控制系统仿真模型,并对其进行仿真实验。
通过对仿真结果的分析,文章将评估矢量控制策略在永磁同步电机控制中的应用效果,并探讨可能的优化措施。
二、永磁同步电机的基本原理和特性永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种利用永久磁铁作为转子励磁源的同步电机。
其工作原理主要基于电磁感应定律和电磁力定律,结合现代电力电子技术和先进的控制理论,实现了对电机的高性能控制。
永磁同步电机的核心构造包括定子绕组和永磁体转子两大部分。
定子绕组与交流电源相连,通入三相对称电流后会产生旋转磁场,类似于异步电机中的定子磁场。
不同于异步电机的是,PMSM的转子上镶嵌有高性能稀土永磁材料,这些永磁体在电机运行时不需外部电源励磁,即可产生恒定的磁场。
当定子旋转磁场与转子永磁磁场相互作用时,便会在电机内部形成一个合成磁场,从而驱动转子跟随定子磁场同步旋转。
高效节能:由于取消了传统同步电机所需的励磁绕组和励磁电源,永磁电机减少了励磁损耗,效率通常能达到90以上,尤其在宽负载范围内保持较高的效率水平。
Maxwell仿真永磁同步电机步骤
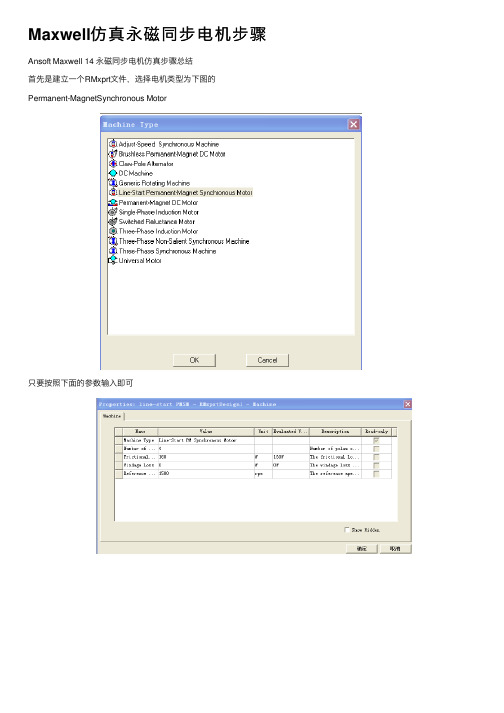
Maxwell仿真永磁同步电机步骤Ansoft Maxwell 14 永磁同步电机仿真步骤总结
⾸先是建⽴⼀个RMxprt⽂件,选择电机类型为下图的Permanent-MagnetSynchronous Motor
只要按照下⾯的参数输⼊即可
磁钢材料NTP264H 要⾃⼰定义
Danper是怎么出来的要右键”Rotor’ ,选择 Insert Danper,就可以了
所有参数输⼊完毕,现在要定义个求解设置,右键“Analysis”添加⼀个setup,
模型
绕组的连接如下
求解结果
⼀键导⼊到maxwell14 2D瞬态场⾥去分析即可,右键Analysis setup 的creat Maxwell design ,auto setup 要打勾导⼊模型如图,是1/4模型(导⼊整个模型的⽅法加注fragnet 1)
因为是1/4模型,所以要设置⼀个 Symmetry Multiplier ,右键”model”,就可以看到,
设置如下
电机在零负载转矩的起动:点击“model”的树,将其展开,双击Motion setup 作如下设置
为了得到,更好的仿真图像,设置⼀下仿真时间,双击Solve setup 作如下设置
以下就是在零负载转矩的情况下的得出的各种起动时间图,横轴的时间单位是毫秒(ms)。
永磁同步电机变频调速系统的建模与仿真

第 2期
移
动
电
源
与
车
辆
1 5
永 磁 同步 电机 变 频 调 速 系统 的建 模 与 仿 真
杨 秀芹 , 贺 彬 , 张 晓 杰
( 1 . 海军航空工程学 院 青 岛校 区 , 山东 青 岛 2 6 6 0 4 2 ; 2 . 9 1 4 9 8部队 , 河北 秦 皇岛 0 6 6 0 0 0 )
收 稿 日期 : 2 0 1 3 - 0 2 - 2 6
等于常数的办法 , 使电机做恒转矩运行。所以, 只要 合理的对电机的供电电压 和频率加以协调控制 , 就
可 以达 到 电动机 变频调 速 的 目的 。
作者简介 : 杨秀芹( 1 9 7 0 - ) , 女, 山东高密人 , 本科 , 主要从事飞机地面 电源保障的教学和研究工作 。
电, 三相对称 电流合成的旋转磁场 与转子永久磁钢 产生 的磁场 相互 作用 产生转矩 , 拖 动转子 同步旋 转 。
位置 传感器 实 时读 取转 子 磁 钢位 置 , 变 换 成 电 信号 控制 逆变器 开关 , 调节 电流频 率 和相位 , 使磁 势保 持 稳定 的位 置关 系 , 产生 恒定 的力矩 。
图功能、 可视化 的仿真环境 J 。使用 S i m u L i n k进行
仿真时很少需要程序 , 只需要用 鼠标完成拖拉等简
单 的操 作 , 就可 以形 象 地 建 立 起 被 研究 系 统 的数 学 模型 , 并进 行仿 真 和分析 研究 。 本 文作 者 以永磁 同步 电机 的变频 调速 系统 为研 究对象, 使用 S i m u l i n k建 立仿 真模 型 , 对 逆 变 电路及 三相桥 式整 流 电路进 行仿 真研 究 。
基于matlab永磁同步电机控制系统建模仿真方法
基于matlab永磁同步电机控制系统建模仿真方法1. 建立永磁同步电机模型
我们可以通过matlab中的Simulink工具箱建立永磁同步电机的模型,模型中包括电机本身和电机驱动系统。
该模型可以包括各种控制系统,比如位置控制、速度控制、电流控制等。
2. 设计控制系统
根据永磁同步电机的特性和实际控制需求,选定相应的控制策略。
常见的控制策略有FOC(磁场定向控制)、DTC(直接扭矩控制)等。
设计控制系统包括建立系统数学模型、设计控制算法、仿真验证等步骤。
3. 仿真实现
在matlab中进行仿真实现,根据设计的控制系统和模型参数,运行仿真程序,验证设计的控制系统的性能和功能是否符合实际控制要求,以此优化和完善控制系统。
4. 实验验证
在实验室或者实际应用场景中,进行实验验证,对控制系统进行调试和优化。
实
验验证可以通过实际硬件搭建或者仿真器件模拟等方式实现。
根据验证结果,并结合实际应用需求,对控制系统进行进一步优化和改进。
永磁同步电机调速系统仿真

• 26•本文介绍了由SPWM 逆变器供电的永磁同步电动机调速系统的仿真设计,系统仿真模型主电路由直流电压源、通用桥式电路及永磁同步电机模块构成,控制电路由PWM 产生器、转速调节器ASR 、电流调节器ACR 及其他辅助模块组成。
通过提取仿真模块、参数设置,搭建系统仿真模型,观察仿真波形。
1 系统原理永磁同步电机因谐波少、转矩精度高及控制相对简单等特点,常用于高性的调速系统。
永磁同步电动机由三相SPWM 逆变器供电,定子电压为正弦波,按照转子磁链定向控制方式,使i sd =0。
检测转子转速ωr 和转角θr ,计算sin θr 和cos θr 。
给定转速ω*,与实际检测的转速比较偏差,然后经转速调节器ASR 得到i *sq ,电流反馈信号i sq 由定子电流经过3s/2r (三相静止/二相旋转)变换提供,经电流调节器ACR 得到定子电压的转矩分量u *sq ,使u *sd =0,经过2r/3s (二相旋转/三相静止)变换,得到SPWM 调制的三相电压信号。
正弦波永磁同步电动机调速系统电路原理框图如图1所示。
2 模型建立在Simscape 环境下,根据系统结构原理图进行仿真建模,步骤包括:在模块浏览器中提取相应模块;设置模块参数;连接各个模永磁同步电机调速系统仿真徐州工程学院电气与控制工程学院 于 蕾 纪 雯图1 系统原理框图块组成仿真模型;设置模型仿真时间及仿真算法等;启动仿真,通过示波器观察各参数的波形并进行分析。
系统主电路由直流电压源模块、通用桥式电路模块和永磁同步电机模块组成。
直流电压源采用DC Voltage Source 模块,电压E 取300V 。
Universal Bridge 通用桥式电路模块,将桥臂数目设置为3,选择电力电子器件类型为IGBT/Diodes 。
逆变器的控制信号使用3桥臂6脉冲的PWM Generator 模块,频率设置为3000Hz 。
永磁同步电机模块有4个输入端,其中Tm 接入机械转矩信号,A 、B 、C 连接三相电压,一个输出端m 用于测量和观察电机的工作状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章绪论1.1 课题研究的背景1.1.1 永磁同步电机的发展状况永磁同步电机出现于20 世纪50 年代。
其运行原理与普通电激磁同步电机相同,但它以永磁体替代激磁绕组,使电机结构更为简单,提高了电机运行的可靠性。
随着电力电子技术和微型计算机的发展,20 世纪70 年代,永磁同步电机开始应用于交流变频调速系统。
20 世纪80 年代,稀土永磁材料的研制取得了突破性的进展,特别是剩磁高、矫顽力大而价格低廉的第三代新型永磁材料钕铁硼(NdFeB)的出现,极大地促进了永磁同步电机调速系统的发展。
尤其值得一提的是我国是一个稀土材料的大国,稀土储量和稀土金属的提炼都居世界首位。
随着稀土材料技术的不断发展,永磁材料的磁能积已经做的很高,价格也早就满足工业应用的需要,加上矢量控制水平的不断提高,永磁同步电动机越来越显出效率高、功率密度大、调速范围宽、脉动转矩小等高性能的优势。
使我国在稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。
新型永磁材料在电机上的应用,不仅促进了电机结构、设计方法、制造工艺等方面的改革,而且使永磁同步电机的性能有了质的飞跃,稀土永磁同步电机正向大功率(超高速、大转矩)微型化、智能化、高性能化的方向发展,成为交流调速领域的一个重要分支[1][2]。
由于受到功率开关元件、永磁材料和驱动控制技术发展水平的制约,永磁同步电机最初都采用矩形波波形,在原理和控制方式上基本上与直流电机类似,但这种电机的转矩存在较大的波动。
为了克服这一缺点,人们在此基础上又研制出带有位置传感器、逆变器驱动的正弦波永磁同步电机,这就使得永磁同步电机有了更广阔的前景。
1.1.2 永磁同步电机控制系统的发展随着永磁同步电动机的控制技术的不断发展,各种控制技术的应用也在逐步成熟,比如SVPWM、DTC、SVM-DTC、MRAS等方法都在实际中得到应用。
然而,在实际应用中,各种控制策略都存在着一定的不足,如低速特性不够理想,过分依赖于电机的参数等等,因此,对控制策略中存在的问题进行研究就有着十分重大的意义。
1971年,德国学者相继提出了交流电机的矢量变换控制的新思想、新理论和新技术,它的出现对交流电机控制技术的研究具有划时代的意义。
因为这种通过磁场定向构成的矢量变换交流闭环控制系统,其控制性能完全可以与直流系统相媲美。
而后,随着电力电子、微电子、计算机技术和永磁材料科学的发展,矢量控制技术得以迅速应用和推广。
矢量控制是在机电能量转换、电机统一理论和空间矢量理论基础上发展起来的,它首先应用于三相感应电动机,很快扩展到三相永磁同步电机。
由于三相感应电动机运行时,转子发热会造成转子参数变化,而转子磁场的观测依赖于转子参数,所以转子磁场难以准确观测,使得实际控制效果难以达到理论分析的结果,这是矢量控制实践上的不足之处。
而永磁同步电机采用永磁体做转子,参数较固定,所以矢量控制永磁同步电机在小功率和高精度的场合应用广泛。
随后,1985年,由德国鲁尔大学M r.D e p e nb r教授首次提出了直接转矩控制的理论,接着又把它推广到弱磁调o c k速范围。
与矢量控制技术相比,直接转矩控制很大程度上解决了矢量控制三相感应电动机的特性易受电机参数变化的影响这一问题。
直接转矩控制一诞生,就以自己新颖的控制思想,简洁明了的系统结构,优良的静动态性能受到了普遍的关注和得到了迅速的发展。
目前该技术成功地应用在电力机车牵引的大功率交流传动上。
德国、日本、美国都竞相发展此项新技术[3][4]。
20世纪90年代后,随着微电子学及计算机控制技术的发展,高速度、高集成度、低成本的微处理器问世及商品化,使全数字化的交流伺服系统成为可能。
通过微机控制,可使电机的调速性能有很大的提高,使复杂的矢量控制与直接转矩控制得以实现,大大简化了硬件,降低了成本,提高了控制精度,还能具有保护、显示、故障监视、自诊断、自调试及自复位等功能。
另外,改变控制策略、修正控制参数和模型也变得简单易行,这样就大大提高了系统的柔性、可靠性及实用性。
近几年,在先进的数控交流伺服系统中,多家公司都推出了专门用于电机控制的芯片。
能迅速完成系统速度环、电流环以及位置环的精密快速调节和复杂的矢量控制,保证了用于电机控制的算法,如直接转矩控制、矢量控制、神经网络控制等可以高速、高精度的完成。
非线性解耦控制、人工神经网络自适应控制、模型参考自适应控制、观测控制及状态观测器、线性二次型积分控制及模糊智能控制等各种新的控制策略正在不断涌现,展现出更为广阔的前景。
因此,采用高性能数字信号处理器的全数字交流永磁伺服智能控制系统是交流伺服系统的重要发展方向之一。
1.1.3 计算机仿真技术的发展现代仿真技术[1]的发展与控制工程、系统工程和计算机技术的发展密切相关。
控制工程是仿真技术较早应用的领域之一,控制工程技术的发展为现代仿真技术的形成和发展奠定了良好的基础。
系统工程的发展进一步完善了系统建模与仿真的理论体系,同时使系统仿真广泛应用于非工程系统的研究和预测[5]。
计算机仿真技术不论是在理论还是实践上都取得了丰硕的成果,积累了大量的体系仿真模型和行之有效的仿真算法。
仿真技术目前仍然存在一些缺陷,例如建模方法尚不完善,研究同一个系统的同一个问题可以建立出不同的模型,而且有些社会经济系统中的问题尚无法建立准确的模型进行求解。
进入90年代,计算机技术的各个方面都取得了很大的发展[6]。
为了获得满意的转矩计算,仿真研究是最有效的工具和手段。
本文利用MATLAB软件下的SIMULINK仿真工具对PMSM系统进行仿真。
1.2 本文主要工作本文立题为永磁同步电机控制系统仿真,进行了一系列的工作,主要涉及以下的研究内容:(1)建模与仿真的关系,及仿真的实际应用意义;(2)介绍永磁同步电机的分类、结构与应用,给出永磁同步电机在不同坐标系下的数学模型及运动方程;(3)介绍永磁同步电机矢量控制的理论基础;(4)建立永磁同步电机矢量控制系统的仿真模型;(5)对仿真结果的进行分析,得出永磁同步电机的性质特点。
第2章建模与仿真建模与仿真是指构造现实世界实际系统的模型和计算机上进行仿真的有关复杂活动,它主要包括实际系统、模型和计算机等三个部分,同时考虑三个基本部分之间的联系,即建模与仿真关系。
2.1 建模与仿真的定义建模关系主要研究实际系统与模型之间的关系,它通过对实验系统的观测和检测,在忽略次要因素及不可检测变量的基础上,用数学的方法进行描述,从而获得实际系统的简化近似模型,如图2-1所示。
仿真关系主要研究计算机的程序实现与模型之间的关系,其程序能为计算机所接受并在计算机上运行[7]。
图2-1 建模与仿真的基本组成与两个关系2.2 实际系统实际系统是所关注的现实世界的某个部分,它具有独立行为规律,是相互联系又相互作用的对象的有机结合。
实际系统可能是自然的或人工的、现在存在的或者未来计划的。
例如,一个进销存储系统是个人工系统,它包括经理部、市场部、采购部、仓储部和销售部等部门,各个部门相互独立又相互联系。
总经理负责各个部分之间的协调,并负责主要的决策。
使系统获得最大的利润。
刚开始建模时,对建模者而言,实际系统可表征为系统行为数据源,即以X对T 曲线为主要形式的行为数据源,X是实际系统中感兴趣的变量,如房间里的温度、大气污染度等,T是时间轴,用秒、小时、日、月等度量,如图2-2所示。
图2-2实际系统的一般表示对于一个系统来说,无论是大还是小,都包括三个要素:实体、属性和活动。
实体是指组成系统的具体对象,系统中的实体既具有一定的相对独立性,又相互联系构成一个整体。
例如,在进销存储系统中,经理、部门、商品、仓库、职员等都为实体。
属性是指对实体特征的描述,用特征参数或变量表示。
实际系统不是孤立的存在的,任何一个系统都将由于系统之外的变化而受影响。
这种对系统活动产生影响的外界因素称为系统的环境。
在系统建模的初始阶段,应考虑系统所处的环境,并首先应划分系统与其所处环境之间的边界。
系统边界包围系统中的所有实体。
系统边界的划分在很大程度上取决于系统研究的目的。
2.3 模型与建模关系构造一个真实系统的模型,在模型上进行实验成为系统分析、研究的十分有效的手段。
为了达到系统研究的目的,系统模型用来收集系统有关信息和描述系统有关实体。
也就是说,模型是为了产生行为数据的一组指令,它可以用数学公式、图、表等形式表示。
模型是对相应的真实对象和真实关系中有些有用的和令人感兴趣的特征的抽象,是对系统某些本质方面的描述,它以各种可用的形式提供被研究系统的描述信息。
模型描述可视为是对真实世界中的物体或过程的相关信息进行形式化的结果。
从某种意义上说,模型是系统的代表,同时也是对系统的简化。
另一方面,模型应足够详细,以便从模型的实验中取得关于系统实验的有效结论[8]。
由一个实际系统构造一个模型的任务一般包括两方面的内容:第一是建立模型结构,第二是提供数据。
在建立模型结构时,要确定系统的边界,还要鉴别系统的实体、属性和活动。
而提供数据则要求能够包括在活动中的各个属性之间有确定的关系,在选择模型结构时,要满足两个前提条件:第一是要细化模型研究的目的,二是要了解有关特定的建模目标与系统结构性质之间的关系。
一般来说,系统模型的结构具有以下一些性质[9][10]:(l)相似性。
模型与研究系统在属性上具有相似的特性和变化规律,这就是说真实系统的“原型”与“替身”之间具有相似的物理属性或数学描述。
(2)简单性。
从实用的观点来看,由于在模型的建立过程中,忽略了一些次要的因素和某些非可测变量的影响,因此实际的模型已是一个被简化了的近似模型。
(3)多面性。
对于由许多实体组成的系统来说,由于其研究目的不同,就决定了所要收集的与系统有关的信息也是不同的,所以用来表示系统的模型不是唯一的。
2.4 仿真关系仿真关系主要关注的是计算机执行模型所规定的指令的真实性,一个模型的程序能否真实地体现模型所具有的内涵,称之为程序的准确性,要验证模型的有效性,需要把模型的行为同实际系统的行为进行比较,这样才不会把程序问题和模型问题混淆起来。
这就要求我们必须懂得仿真过程,包括仿真机理和仿真策略。
2.5 建模与仿真工作内容任何一个科学领域的科学研究都会涉及建模与仿真的问题,建模与仿真成为当今现代科学技术研究的主要内容。
其技术也渗透到各学科和工程技术领域。
为了让建模与仿真研究成果更好地被直接应用或者用来指导将来的工作,使这项工作对科学与工业能有长期贡献,并让有关用户和同行能更好理解和交流有关工作及实验。
仿真建模表示内容可规范如下[6-10]:(1)模型和针对模型构造的假设的非形式描述(2)模型结构形式描述(3)执行仿真的程序设计(4)仿真试验、试验结果及分析(5)模型应用的范围、有效性(6)现在模型与过去的和将来的模型的关系2.6本章小结建模与仿真活动一般由下面五个要素组成:实际系统、实际框架、基本模型、集总模型和计算机。