陀螺仪芯片手册L3G4200D亲手译
推荐-L3G42D亲译手册2 精品

3启动顺序一旦设备上电,它就会自动把内部闪存的标准配置装载到内部寄存器。
当引导程序结束,也就是上电5毫秒之后,设备自动进入省电模式。
要开启设备并且采集角速率数据,就要通过CTRL_REG1选择运行模式,并且使能至少一个轴。
下面顺序可以用于配置设备:1. Write CTRL_REG22. Write CTRL_REG33. Write CTRL_REG44. Write CTRL_REG65. Write Reference6. Write INT1_THS7. Write INT1_DUR8. Write INT1_CFG9. Write CTRL_REG510. Write CTRL_REG13.1读取角速率数据设备包含一个状态寄存器STATUS_REG,应该检测当新的一组数据有效产生。
读取顺序应该:1. Read STATUS_REG2. If STATUS_REG(3) = 0 then go to 13. If STATUS_REG(7) = 1 then some data have been overwritten4. Read OUT_X_L5. Read OUT_X_H6. Read OUT_Y_L7. Read OUT_Y_H8. Read OUT_Z_L9. Read OUT_Z_H10. Data processing11. Go to 1第3步执行的检测用于判断数据读取的速度是否适合数据产生的速度,STATUS_REG的ZYXOR 位应该被设置为1,以防止由于过慢的读取速度导致一个或者多个角速率数据被新的数据覆盖。
当设备中所有的现有数据已经被读取并且期间新的数据还没有产生,那么超限的位被自动清除。
3.1.2 使用数据就绪(DRY)信号设备应该被配置有一个HW信号以确定一组新的测量数据可以读取。
这个信号由STATUS_REG的XYZDA位表示。
这个信号可以由DRY/INT2引脚检测(通过设置CTRL_REG3的I2_DRDY位为1,并且通过设置CTRL_REG3的H_Lactive位决定高电平有效或者低电平有效(详见5.1章节))当一组新的角速率数据产生并且准备好可读取时Data_ready信号上升为1。
加速计陀螺仪培训资料英文版
路漫漫其修远兮,
吾将上下而求索
Smart embedded
function
ISS331DL
路漫漫其修远兮, 吾将上下而求索
LIS331DLH
路漫漫其修远兮, 吾将上下而求索
LIS331DLH
路漫漫其修远兮, 吾将上下而求索
LIS331DLH
路漫漫其修远兮, 吾将上下而求索
LIS331DLH
I2C waveform and data
Write Command ["accel --intr"]:measure pin 4&6
路漫漫其修远兮, 吾将上下而求索
Accelerometer application
Free-fall detection Motion activated functions Gaming and virtual reality input device Vibration monitoring and compensation
加速计陀螺仪培训资料 英文版
路漫漫其修远兮, 吾将上下而求索
2020年4月7日星期二
content
Accelerometer principle MEMS Accelerometer (LIS331DLH) Accelerometer application Gyroscope principle MEMS Gyroscope (L3G4200DH) Gyroscope application
路漫漫其修远兮, 吾将上下而求索
L3G4200DH
路漫漫其修远兮, 吾将上下而求索
L3G4200DH
路漫漫其修远兮, 吾将上下而求索
L3G4200DH
路漫漫其修远兮, 吾将上下而求索
陀螺仪芯片手册L3G4200D亲手译

L3G4200D MEMS 运动传感器: 超稳定的三轴数字输出陀螺仪
特点
■三种可选的全尺度(250/500/2000DPS) ■I2C/SPI 数字输出接口 ■16 比特率值的数据输出 ■8 位温度数据输出 ■两个数字输出线(中断和数据就绪) ■集成的低和高通滤波器与用户可选择带宽 ■超稳定的温度和时间 ■宽电源电压:2.4 V 至 3.6 V ■低电压兼容的 IOS(1.8 伏) ■嵌入省电和睡眠模式 ■嵌入式温度传感器 ■嵌入式 FIFO(先入现出堆栈) ■高冲击的生存能力 ■扩展的工作温度范围(-40℃至+85℃) ■ECOPACK® RoHS 和“绿色”兼容
5.2.2 SPI 写………………………………25 5.2.3 SPI 读三线模式…………………………26 6 输出寄存器映射…………………………27 7 寄存器的描述…………………………29 7.1 WHO_AM_I(0FH)……………………………… … 29 7.2 CTRL_REG1(20H)……………………………… 29 7.3 CTRL_REG2(21H)……………………………… 30 7.4 CTRL_REG3(22H)……………………………… 31 7.5 CTRL_REG4(23H)……………………………… 32 7.6 CTRL_REG5(24 小时)……………………………… 32 7.7 参考/ DATACAPTURE(25H)……………………34 7.8 OUT_TEMP(26H)……………………………… 34
应用
■游戏和虚拟现实输入设备 ■运动控制与人机界面(人机接口) ■全球定位导航系统 ■家电和机器人技术
说明
L3G4200D 是一种低功耗三轴角 速率传感器能够提供前所未有的 安然的零利率水平和灵敏度超过 温度和时间…它包括一个传感 元素,并能够提供一个 IC 接口 外部世界的测角速率 通过数字接口(I2C/SPI)…
苹果iPhone 4全机拆解芯片级详细解说评测
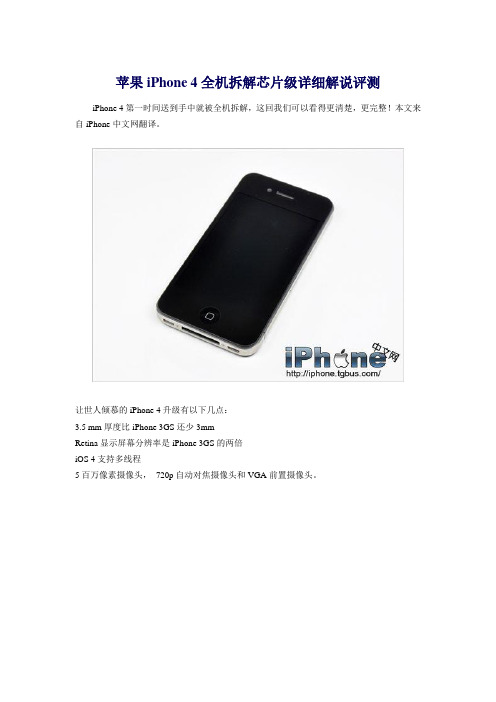
苹果iPhone 4全机拆解芯片级详细解说评测iPhone 4第一时间送到手中就被全机拆解,这回我们可以看得更清楚,更完整!本文来自iPhone中文网翻译。
让世人倾慕的iPhone 4升级有以下几点:3.5 mm厚度比iPhone 3GS还少3mmRetina显示屏幕分辨率是iPhone 3GS的两倍iOS 4支持多线程5百万像素摄像头,720p自动对焦摄像头和VGA前置摄像头。
iPhone 4的外壳设计很有戏剧性,在大量使用镁铝合金和塑料外壳的今天,在iPhone 4上却已经成为了过去式。
一圈不锈钢材质的边框不仅提供了良好的支撑,还起到天线作用,令新手接收效果大大增强。
这样的设计确实要比iPhone 3GS要提升很多。
iPhone 4外壳背面并没有像以往那样标注存储容量。
事实上32 GB标称的iPhone 4,使用空间只有29.06 GB。
还有301 MB容量被“其他”占用了,留给用户的只有28.77 GB空间。
iPhone 4预装了iOS 4 build 8A293固件。
这部iPhone 4 编号为Model A1332,有趣的是比A1337 iPad 3G编号要低。
难道是设计更早?和iPhone 3G,3GS一样,使用的是两颗Phillips #00号螺丝固定。
但是与iPhone 3G和3GS不同的是螺丝固定的是背壳,而不是前玻璃面板。
这样的设计让替换后盖更加容易,但是如果是要更换前面板则是一项挑战。
取下后盖我们看到了精致的iPhone 4内部。
神圣的电池啊! 看上去更修长,更大。
iPhone 4 115.2 x 58.6 x 9.3 mm的有限空间内被装的满满当当。
你可以看见iPhone 4的天线被接到了边框上。
幸运的是iPhone 4的电池能被很容易取下。
3.7V 1420 mAh毫安锂电池,提供7小时3G网路通话时间和14小时2G网络通话时间。
电池接口部分也与3G和3GS不同,不过并没有焊接在主板上,电池后的塑料薄片标注"Authorized Service Provider Only."“仅授权售后人员”在我们与iPhone 4内部间并没有电磁屏蔽罩。
恒定倾角传感器-陀螺仪产品目录说明书

GeneralWeight0.14 kgTemperature (operating) -40°C to 85°C Temperature (storage) -40°C to 105°CNumber of axes 3 (X/Y/Z/) or 2 (SSI2)Angular range ±90° (X/Y/Z)Pitch range ±180° (SSI2)Roll range±90° (SSI2)Communication CAN protocol SAE J1939CAN messages see part drawing CAN bus speed250 k, up to 500 k Data broadcast rate 50 Hz, up to 200 Hz CAN source address 0xE4Mechanical characteristics Mounting bolt 1/4”-20 UNC or M6x1.0Mounting torque 135 in-lb max Mounting surface flatness .010”ConnectorDeutsch DTElectrical specifications Operating voltage 6 - 36 VdcStartup voltage 5.25 Vdc (20 ms max)Reverse polarity-48 VdcShort circuit protection -V BAT and 48 Vdc Current draw19.0 mA (12 V)18.0 mA (24 V)Tilt resolution 0.01°/BIT Pitch/Roll resolution 0.00003°/BIT Static repeatability 0.05°Static accuracy (pitch/roll) ±0.3° typical Dynamic accuracy (pitch/roll) ±0.5° typical Starting time 50 ms max.Settling time 100 ms Ordering part numberUTS-G163161ECD Steel shield 165361ECDEMIISO 11452-2100 V/m ISO7637-2 and -3 transientsEN 61000-6-2 and 6-4 conducted disturbance ISO 13766:2010 radiated emission ISO 14982:2009 radiated emission ESDISO 10605:2008 ±15 kV Mechanical Shock 1m drop Vibration40 GsApplicationThe UTS-G belongs to the Parker family of accessories provided to complement electronic control systems. The UTS-G is a multi-axis, MEMS technology tilt sensor for mobile hydraulic applications. The sensor communicates over a CAN bus using SAE J1939 protocol and has an integral Deutsch connector. The UTS-G is an enhanced version of the standard UTS with gyroscopic compensation that meets increasing mobile equipment requirements for dynamic performance monitoring. Other properties we focus on are stability, reliability, electromagnetic immunity, and ease of installation.PropertiesReliabilityThe UTS-G has a glass-filled, hybrid plasticconstruction for sturdiness and corrosion resistance. The sensor is very robust and able to withstand rugged applications while being protected and sealed against harsh environments using spin-weld technology. These features give the sensor IP68/IP69K protection for exposed outdoor applications. Electromagnetic immunityThe design of the UTS-G has a high level of EMI protection.InstallationThis design allows for the use of standard ¼” or M6 bolts for mounting. T he 3 mounting holes are in a tripod pattern to facilitate a mistake proof installation reducing overall manufacturing time. The 4 pinconnector is a sealed Deutsch DT type designed for automotive use. These features provide for easy installation and removal, even in field conditions. Environmental protection Climate Sealing IP68 / IP69K(with rear connector protection, such as backshell)ChemicalLiquids (resistance) standard automotive Markings and Approvals CE2014/30/EU EMC 2011/65/EU RoHS2MOUNTING SURFACEØ 4.00” [101.6]BOLT CIRCLE110°110°ACCOMMODATE Ø 0.25”-20 [M6 x 1.0] BOLT X 31.33” [33.8]0.52” [13.1]Ø 4.52” [114.8]4.66” [118.4]OFFER OF SALEThe items described in this document are hereby offered for sale by Parker-Hannifin Corporation, its subsidiaries or its authorized distributors. This offer and its acceptance are governed by the provisions stated in the detailed “Offer of Sale” available from your Parker representative or at .Parker Hannifin Corporation Electronic Controls Division 850 Arthur AvenueElk Grove Village, IL, 60007 USA phone 800 221 9257******************Parker Motion Systems International Sales OfficesNorth AmericaMotion Systems Group Headquarters6035 Parkland BoulevardCleveland, OH 44124-4141 USA Tel: 216-896-3000 Fax: 216-896-4031Parker Canada Division 160 Chisholm Drive Milton Ontario Canada L9T 3G9 Tel: 905-693-3000 Fax: 905-876-1958Parker Hannifin de México Industrial Hydraulic Sales Eje Uno Norte No.100Parque Industrial Toluca 2000 Toluca, Edo, de Mexico CP 50100 Tel: 52 722 275 4200 Fax: 52 722 279 9308Parker Hannifin de México Mobile Hydraulic SalesVia de FFCC a Matamoraos 730 Apodaca, NL, de Mexico CP 66600 Tel: 52 81 8156 6000 Fax: 52 81 8156 6068EuropeMotion Systems Group Headquarters La Tuilière 61163 Etoy - Switzerland Tel: 41 21 821 8500 Fax: 41 21 821 8580South AfricaParker Hannifin Africa Pty Ltd P .O. Box 1153ZA-Kempton Park 1620, Republic of South Africa Tel: 27 11 961 0700 Fax: 27 11 392 7213Mobile SalesMobile Sales Organization and Global Sales 850 Arthur AvenueElk Grove Village, IL 60007 USA Tel: 847-258-6200 Fax: 847-258-6299Industrial SalesCentral Region1042 Maple Avenue Unit 331Lisle, IL 60532 USA Tel: 630-964-0796Great Lakes Region6035 Parkland BoulevardCleveland, OH 44124-4141 USA Tel: 216-896-2740 Fax: 866-498-7507Gulf Region20002 Standing Cypress Drive Spring, TX 77379 USA Tel: 817-473-4431 Fax: 888-227-9454Southwest Region 700 S. 4th AvenueMansfield, TX 76063 USA Tel: 817-473-9341 Fax: 817-473-2680Mid Atlantic and Southeast Regions1225 Old Alpharetta Road Suite 290Alpharetta, GA 30005 USA Tel: 770-619-9767 Fax: 770-619-9806Midwest Region 8145 Lewis RoadMinneapolis, MN 55427 USA Tel: 763-513-3535 Fax: 763-544-3418Northeast Region P .O. Box 396Pine Brook, NJ 07058 USA Tel: 973-227-2565 Fax: 973-227-2467 Northwest Region6458 North Basin Avenue Portland, OR 97217 USA Tel: 503-283-1020 Fax: 866-611-7308 Pacific Region 8460 Kass DriveBuena Park, CA 90621 Tel: 714-228-2510 Fax: 714-228-2511Asia PacificParker Hannifin Shanghai Ltd 280 Yunqiao Road,Jin Qiao Export Processing Zone Shanghai 201206, China Tel: 86 21 2899 5000 Fax: 86 21 6445 9917Parker Hannifin Hong Kong Ltd 8/F , Kin Yip Plaza 9 Cheung Yee StreetCheung Sha Wan, Hong Kong Tel: 852 2428 8008 Fax: 852 2425 6896Parker Hannifin Korea Ltd 9F KAMCO Yangjae Tower949-3 Dogok1-dong, Gangnam-gu Seoul, 135-860, Korea Tel: 82 2 559 0400 Fax: 82 2 556 8187Parker Hannifin India Pvt Ltd Plot No. EL-26, MIDC TTC Industrial AreaMahape, Navi Mumbai, 400 709 India Tel: 91 22 6513 7081 Fax: 91 22 2768 6841Parker Hannifin Australia Parker Hannifin Pty Ltd. 9 Carrington RoadCastle Hill, NSW 2154, Australia Tel: 612 9634 7777 Fax: 612 9842 5111Latin AmericaParker Hannifin Ind. e Com. Ltda Hydraulics Division Av. FredericoRitter, 110094930-000 Cachoeirinha RS, Brazil Tel: 55 51 3470 6090 Fax: 55 51 3470 9281Parker Hannifin Argentina S.A.I.C.Stephenson 27111667-T ortuguitas-Malvinas Argentinas Pcia. de Buenos Aires, Argentina Tel: 54 3327 44 4129 Fax: 54 3327 44 4199Pan American Division7400 NW 19th Street, Suite A Miami, FL 33126 USA Tel: 305-470-8800 Fax: 305-470-8808MSG33-2382/US04/2020© 2020 Parker Hannifin Corporation. All rights reserved.。
Epson陀螺仪应用手册

ASIA EPSON (CHINA) CO., LTD. 23F, Beijing Silver Tower 2# North RD DongSangHuan ChaoYang District, Beijing, China Phone: (86) 10-6410-6655 Shinghai Branch High-Tech Building,900 Yishan Road Shanghai 200233,China Phone: (86) 21-5423-5577 Fax: (86) 21-5423-4677 EPSON HONG KONG LTD. 20/F., Harbour Centre, 25 Harbour Road, Wanchai, Hong kong Phone: (852) 2585-4600 Fax: (852) 2827-2152 EPSON ELECTRONIC TECHNOLOGY DEVELOPMENT (SHENZHEN )CO., LTD. 12/F, Dawning Mansion,#12 Keji South Road, Hi-Tech Park, Shenzhen, China Phone: (86) 755-26993828 Fax: (86) 755-26993838 EPSON TAIWAN TECHNOLOGY & TRADING LTD. 14F, No.7, Song Ren Road, Taipei 110 Phone: (886) 2-8786-6688 Fax: (886)2-8786-6660 EPSON SINGAPORE PTE. LTD. 401, Commonwealth Drive, #07-01 Haw Par Technocentre Singapore 149598 Phone: (65) 6-586-3100 Fax: (65) 6-472-4291 .sg SEIKO EPSON CORPORATION KOREA Office 50F, KLI 63 Building,60 Yoido-dong, Youngdeungpo-Ku, Seoul, 150-763, Korea Phone: (82) 2-784-6027 Fax: (82) 2-767-3677 http://www.epson-device.co.kr Gumi Branch Office 2F, Grand Blde,457-4, Songjeong-dong Gumi-City, Gyongsangbuk-Do, 730-090, Korea Phone: (82) 54-454-6027 Fax: (82) 54-454-6093 Fax: (86) 10-6410-7319
陀螺全站仪使用说明书
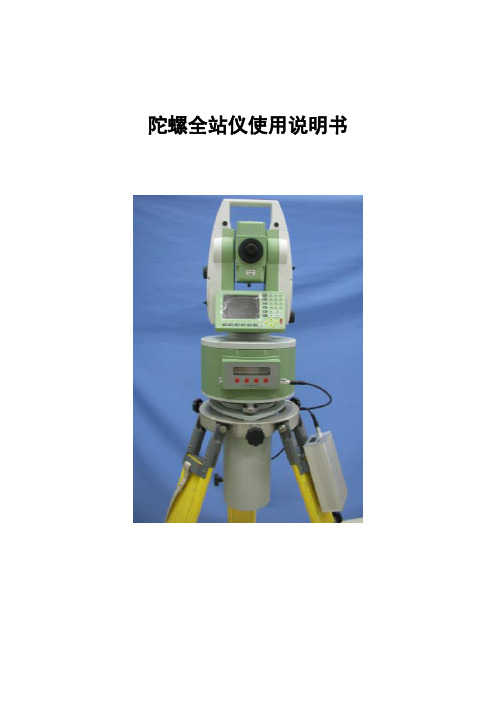
陀螺全站仪使用说明书目次1概述1.1功能和用途1.2主要性能参数2仪器组成3工作原理4使用方法4.1三脚架架设4.2陀螺全站仪主机架设4.3维度输入4.4测量程序4.5数据处理4.6仪器撤收5仪器常数标定5.1仪器常数标定方法5.2仪器常数修正方法6电源使用说明7典型故障及故障排除方法8使用注意事项9维护保养10仪器故障及解决方法1概述1.1功能和用途陀螺全站仪是全自动陀螺仪,其主要功能是提供北向方位基准,可为火炮、雷达提供初始方位基准,并可应用于大地测量、工程测量和矿山贯通测量等领域。
1.2主要性能参数仪器主要技术指标见表1。
表1 陀螺全站仪主要技术指标表2仪器组成产品配套情况见表2。
表2 陀螺全站仪产品配套表3工作原理陀螺全站仪的工作原理是用吊丝悬挂重心下移的陀螺灵敏部敏感地球自转角速度的水平分量,在重力作用下,产生一个北向进动的力矩,使陀螺敏感部主轴(即H向量)围绕子午面往复摆动,通过光电传感器将陀螺灵敏部往复摆动的光信号,转换为电信号,传送给控制系统,控制系统自动跟踪陀螺灵敏部的方位摆动,并对灵敏部进行加矩控制,解算出被测目标的北向方位角。
4使用方法陀螺全站仪主机的使用包括全站仪的使用,全站仪的详细使用方法参见相关全站仪的使用说明书。
4.1三脚架架设在测站架设三脚架,架设时应使三脚架的三个脚尖大致与测点标志中心基本等距,并注意脚架的张角和高度,伸缩脚架腿使圆水准器概略居中。
4.2陀螺全站仪主机架设陀螺全站仪主机架设按以下步骤进行操作。
a.取出陀螺全站仪主机。
三脚架架设完毕后,从包装箱中取出主机(切勿大角度倾斜或倒置),然后将其平稳置于三脚架上。
b.陀螺全站仪主机粗对北。
取出包装箱内的磁罗盘,按照其使用说明书规定的方法,确定当地大致北向;将陀螺寻北仪主机粗对北标记置于大致北向(北向可以借助磁罗盘确定,其使用方法见磁罗盘使用说明书);然后顺时针方向旋转锁紧三脚架上的三个对心手轮。
c.取出锂离子电池,放置在三脚架的固定位置上,然后将2芯电源电缆两端分别与主机和电池连接。
Omega 4200A RTD数字控制器说明书

RTDDigital ControllersߜHigh Accuracy:to 0.1% of SpanߜSingle and DualSetpoint Modelsߜ1.0°and 0.1°Models ߜAdjustableProportion BandߜBright LED Display 4200A Series $424 Basic UnitThe OMEGA®4200A Series is an ideal controller for RTD applications. This quality-built linearized instrument is available in both 1.0°and 0.1°resolution models. Higher accuracies, accuracies 5 to 10 times greater than the typical 1% meter indicating controller, are achieved through a unique linearizing technique.Bright, easy-to-read LED digits present an unambiguous temperature indication. Accuracy is enhanced through 3-wire lead compensation– a feature allowing the sensor to be up to 1000' from the controller. The standard unit includes adjustable proportional band, manual reset, plus a metal 1⁄4DIN case with full plug-in construction, allowing front removal of the control unit without disturbing the case and its rear wiring. The series 4200A controllers are available in single or dual setpointmodels with relay output as a standard. Triacor 4 to 20 mA optional outputs are offeredon the first setpoint at no additionalcost. Truly a superior controllerat a remarkably low price.Model 4201A Single Setpoint Proportional ControllerThis versatile digital controller can be operated as a proportional controller with the adjustable bandwidth up to 3% of full span. The setpoint temperature is always available. Simply push the spring-loaded setpoint switch to the right, and the setpoint is digitally displayed. To change the setpoint, with the switch deflected to the right, adjust the knob to the right of the switch until you get the desired reading. The standard Model 4201 has an internal SPDT relay (7 amp resistive at120 Vac). This model is also available with optional Triac or 4 to 20 mA output in place of the relay. See Options andSpecifications for more information.Model 4202A Dual SetpointControllerThe first setpoint of the Model 4202Aincorporates the same features as theModel 4201A and also can be orderedwith the optional Triac or 4 to 20 mAoutput. The second setpoint may be setat any value within the full span of thecontroller. It energizes an SPDT internalrelay (3 amp resistive 120 Vac) whichcan be used as either an on-off control,a high-limit alarm, or a low-limit alarm.For an alarm with latching features, anexternal latching relay and push buttonto reset are suggested. The secondsetpoint is set and displayed using thesame procedure as for the Model 4201Aexcept the switch is deflected to the leftand the left adjustment knob is used.Option “T” Triac OutputOption “T” replaces the relay output onthe first setpoint with a solid state plug-inTriac which yields time-proportional oron-off switching. The Triac is rated at1 amp continuous and 10 amps in rushfor both 120 and 240 Vac service. Forhigher amperage loads the Triac may beused to drive higher rating solid staterelays or mechanical contractors. Specifyoption “T” after the model number whenordering, no additional charge.Option “F” (4 to 20 mA Output)This option is applicable to the firstsetpoint only and is used to driveproportioning devices such as SCRpower controller, motor positioners, orelectropneumatic actuators. The 4 to 20mA dc output signal can be connected toa maximum of 1000 ohm resistanceload. This signal is 20 mA at the lowtemperature end of the proportional bandand is decreased linearly through theband to 4 mA at the high temperatureend. If the driven device is not isolated(ungrounded) an ungrounded sensormust be used with the Series 4200Awhich is designed for only one ground inthe system. Specify option “F” after themodel number when ordering, noadditional charge.PR-10-2-100-1/4-12-E generalpurpose RTD Probe, $63, soldseparately. See page C-7.Shown smallerthan actual sizeDimensions mm (in.)Option “T” (Triac): Solid state plug-in triac rated 1 amp holding and 10 amps in-rushOption “F” (current proportional): 4 to 20 mA (dc) into 1000 ohm max 2nd Setpoint:Relay (on-off only): SPDT, rated 3 amps at 120 VacAdjustmentsProportional Band (gain): 0 to 3% of span, or on-off; selectableManual Reset (offset): Adjustable Cycle Time: Automatically adjustswith load requirement to give least wear with minimum ripple (10 sec. minimum total time)Display and IndicationsTemperature: Filtered LED, 3 or 31⁄2digits, 2 readings per second update;readability is 1.0°or 0.1°(°F or °C),depending on modelSetpoint: By spring loaded switch, first or second setpoint is displayed in place of temperature; setpoint adjusted by 25 turn pot.; 1.0°or 0.1°setabilityOutputs: LED indication for both first and second setpoints; LED are “on” when output drive signal present; “On-off”indication on relay and triac model;proportional intensity for option “F.”Temperature Overrange: Red LED indicationSetpointResolution: 1.0°or 0.1°(°F or °C),depending on modelRepeatability: ±0.1% to ±0.2% of span Adjustment: By 25 turn pot.; see “Setpoint” under “Display and Indication” section.Power: 120/240 Vac (+10%, -15%, 50/60 Hz). Power consumption less than 5 wattsEnvironmental & PhysicalOperating Temperature: -1 to 54°C (30 to 130°F)Weight: 1 kg (2 lb)1⁄4DIN Case: Metal, full plug-in with screw terminal on rear. Adjustable brackets for panel mounting; panel cutout is 92 x 92 mm (3.622 x 3.622")*Specifications and configurations subject to change as advances in technology allow. Ordering Example: 4202APF1, RTD digital controller, $459. OCW-3 OMEGACARE SM extends standard 2-year warranty to a total of 5 years ($114), $459 + 114 = $573.*SpecificationsRTD InputType: 100 ohm platinum; alpha = 0.00385 (DIN curve)Configuration: 3 wireExternal Lead Wire Resistance Effect: 0.1% span up to 10 ohms per lead wire legSensor Break Protection: Built-in, upscale on open sensor Calibration Accuracy: 1.0°resolution model: ±0.1% of span ±1 digit 0.1°resolution model: ±0.2% of span ±1 digitStability: 0.1% for 30 to 130°F, 0.1% +10% to 15% line voltageCommon Mode Rejection: Max error ±1°C with 240 V, 60 Hz applied as common mode signal between sensor input and chassis ground Series Mode Rejection: Max error ±1°C with seriesmode signal of 100 mV PK-to-PK at 60 HzControl Output1st Setpoint (Adjustable Time Proportional):Relay (Standard Model): SPDT relay 7 amps resistive at 120 Vac, 5 amps resistive at 240 VacCANADA www.omega.ca Laval(Quebec) 1-800-TC-OMEGA UNITED KINGDOM www. Manchester, England0800-488-488GERMANY www.omega.deDeckenpfronn, Germany************FRANCE www.omega.fr Guyancourt, France088-466-342BENELUX www.omega.nl Amstelveen, NL 0800-099-33-44UNITED STATES 1-800-TC-OMEGA Stamford, CT.CZECH REPUBLIC www.omegaeng.cz Karviná, Czech Republic596-311-899TemperatureCalibrators, Connectors, General Test and MeasurementInstruments, Glass Bulb Thermometers, Handheld Instruments for Temperature Measurement, Ice Point References,Indicating Labels, Crayons, Cements and Lacquers, Infrared Temperature Measurement Instruments, Recorders Relative Humidity Measurement Instruments, RTD Probes, Elements and Assemblies, Temperature & Process Meters, Timers and Counters, Temperature and Process Controllers and Power Switching Devices, Thermistor Elements, Probes andAssemblies,Thermocouples Thermowells and Head and Well Assemblies, Transmitters, WirePressure, Strain and ForceDisplacement Transducers, Dynamic Measurement Force Sensors, Instrumentation for Pressure and Strain Measurements, Load Cells, Pressure Gauges, PressureReference Section, Pressure Switches, Pressure Transducers, Proximity Transducers, Regulators,Strain Gages, Torque Transducers, ValvespH and ConductivityConductivity Instrumentation, Dissolved OxygenInstrumentation, Environmental Instrumentation, pH Electrodes and Instruments, Water and Soil Analysis InstrumentationHeatersBand Heaters, Cartridge Heaters, Circulation Heaters, Comfort Heaters, Controllers, Meters and SwitchingDevices, Flexible Heaters, General Test and Measurement Instruments, Heater Hook-up Wire, Heating Cable Systems, Immersion Heaters, Process Air and Duct, Heaters, Radiant Heaters, Strip Heaters, Tubular HeatersFlow and LevelAir Velocity Indicators, Doppler Flowmeters, LevelMeasurement, Magnetic Flowmeters, Mass Flowmeters,Pitot Tubes, Pumps, Rotameters, Turbine and Paddle Wheel Flowmeters, Ultrasonic Flowmeters, Valves, Variable Area Flowmeters, Vortex Shedding FlowmetersData AcquisitionAuto-Dialers and Alarm Monitoring Systems, Communication Products and Converters, Data Acquisition and Analysis Software, Data LoggersPlug-in Cards, Signal Conditioners, USB, RS232, RS485 and Parallel Port Data Acquisition Systems, Wireless Transmitters and Receivers。
ADXRS614单芯片综合角速度陀螺仪技术参数数据手册说明书
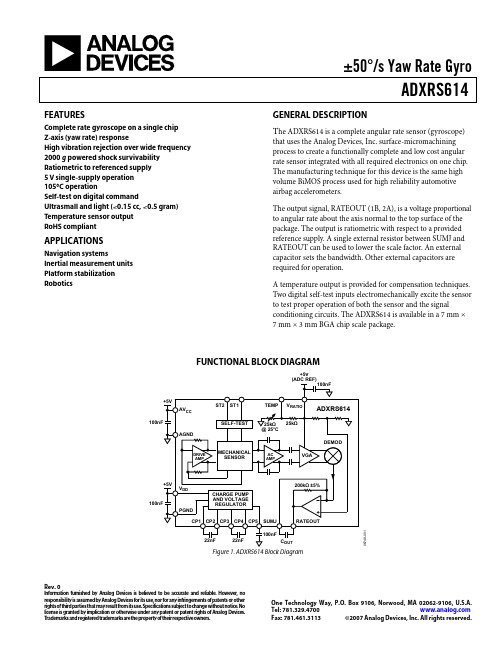
±50°/s Yaw Rate GyroADXRS614Rev. 0Information furnished by Analog Devices is believed to be accurate and reliable. However , no responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other rights of third parties that may result from its use. Specifications subject to change without notice. No license is granted by implication or otherwise under any patent or patent rights of Analog Devices. T rademarks and registered trademarks are the property of their respective owners.One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.Tel: 781.329.4700 Fax: 781.461.3113 ©2007 Analog Devices, Inc. All rights reserved.FEATURESComplete rate gyroscope on a single chip Z-axis (yaw rate) responseHigh vibration rejection over wide frequency 2000 g powered shock survivability Ratiometric to referenced supply 5 V single-supply operation 105°C operationSelf-test on digital commandUltrasmall and light (<0.15 cc, <0.5 gram) Temperature sensor output RoHS compliantAPPLICATIONSNavigation systemsInertial measurement units Platform stabilization RoboticsGENERAL DESCRIPTIONT he ADXRS614 is a complete angular rate sensor (gyroscope)that uses the Analog Devices, Inc. surface-micromachining process to create a functionally complete and low cost angular rate sensor integrated with all required electronics on one chip. The manufacturing technique for this device is the same high volume BiMOS process used for high reliability automotive airbag accelerometers.The output signal, RATEOUT (1B, 2A), is a voltage proportional to angular rate about the axis normal to the top surface of the package. The output is ratiometric with respect to a provided reference supply. A single external resistor between SUMJ and RATEOUT can be used to lower the scale factor. An external capacitor sets the bandwidth. Other external capacitors are required for operation.A temperature output is provided for compensation techniques. Two digital self-test inputs electromechanically excite the sensor to test proper operation of both the sensor and the signalconditioning circuits. The ADXRS614 is available in a 7 mm × 7 mm × 3 mm BGA chip scale package.FUNCTIONAL BLOCK DIAGRAM+5V 06748-001Figure 1. ADXRS614 Block DiagramADXRS614Rev. 0 | Page 2 of 12TABLE OF CONTENTSFeatures..............................................................................................1 Applications.......................................................................................1 General Description.........................................................................1 Functional Block Diagram..............................................................1 Revision History...............................................................................2 Specifications.....................................................................................3 Absolute Maximum Ratings............................................................4 Rate Sensitive Axis.......................................................................4 ESD Caution..................................................................................4 Pin Configuration and Function Descriptions.............................5 Typical Performance Characteristics.............................................6 Theory of Operation.........................................................................9 Setting Bandwidth.........................................................................9 Temperature Output and Calibration.........................................9 Calibrated Performance................................................................9 ADXRS614 and Supply Ratiometricity......................................9 Null Adjustment.........................................................................10 Self-Test Function......................................................................10 Continuous Self-Test..................................................................10 Outline Dimensions.......................................................................11 Ordering Guide.. (11)REVISION HISTORY4/07—Revision 0: Initial VersionADXRS614Rev. 0 | Page 3 of 12SPECIFICATIONSAll minimum and maximum specifications are guaranteed. Typical specifications are not guaranteed.@T A = −40°C to +105°C, V S = AV CC = V DD = 5 V , V RATIO = AV CC , angular rate = 0°/s, bandwidth = 80 Hz (C OUT = 0.01 μF), I OUT = 100 μA, ±1 g , unless otherwise noted. Table 1.ADXRS614BBGZParameter Conditions Min Typ Max Unit SENSITIVITY (Ratiometric)1Clockwise rotation is positive output Measurement Range 2Full-scale range over specifications range ±50 ±75 °/secInitial and Over Temperature22.5 25 27.5 mV/°/sec Temperature Drift 3 ±3 % Nonlinearity Best fit straight line 0.1 % of FS NULL (Ratiometric)1 Null −40°C to +105°C 2.5 V Linear Acceleration Effect Any axis 0.1 °/sec/g NOISE PERFORMANCE Rate Noise Density T A = 25°C 0.04 °/sec/√Hz FREQUENCY RESPONSEBandwidth 41 1000 Hz Sensor Resonant Frequency 14.5 kHz SELF-TEST (Ratiometric)1ST1 RATEOUT ResponseST1 pin from Logic 0 to Logic 1 −1.9 V ST2 RATEOUT Response ST2 pin from Logic 0 to Logic 1 1.9 V Logic 1 Input Voltage 0.8 × V RATIO V Logic 0 Input Voltage 0.2 × V RATIO V Input Impedance To common 50 kΩ TEMPERATURE SENSOR (Ratiometric)1 V OUT at 25°C Load = 100 MΩ 2.35 2.5 2.65 VScale Factor 5@25°C, V RATIO = 5 V 9 mV/°C Load to V S 25 k Ω Load to Common 25 k Ω TURN-ON TIME Power on to ±½°/sec of final 50 ms OUTPUT DRIVE CAPABI L ITY Current Drive For rated specifications 200 μA Capacitive Load Drive 1000 pF POWER SUPP L Y Operating Voltage (V S ) 4.75 5.00 5.25 V V RATIO Input 3 V S V Supply Current 3.5 5.0 mA TEMPERATURE RANGESpecified Performance–40 +105 °C1 Parameter is linearly ratiometric with V RATIO .2The maximum range possible, including output swing range, initial offset, sensitivity, offset drift, and sensitivity drift at 5 V supplies. 3From +25°C to −40°C or from +25°C to +105°C. 4Adjusted by external capacitor, COUT. 5For a change in temperature from 25°C to 26°C. V TEMP is ratiometric to V RATIO . See the Temperature Output and Calibration section for more details.ADXRS614Rev. 0 | Page 4 of 12ABSOLUTE MAXIMUM RATINGSTable 2.Parameter RatingAcceleration (Any Axis, 0.5 ms)Unpowered, 2000 gPowered 2000 gV DD, AV CC –0.3 V to +6.0 VV RATIO AV CC Output Short-Circuit Duration (Any Pin to Common)Indefinite Operating Temperature Range –55°C to +125°C Storage Temperature –65°C to +150°CStresses above those listed under the Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only; functional operation of the device at these or any other conditions above those indicated in the operationalsection of this specification is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.Drops onto hard surfaces can cause shocks of greater than 2000 g and can exceed the absolute maximum rating of the device. Exercise care during handling to avoid damage. RATE SENSITIVE AXISThe ADXRS614 is a Z-axis rate-sensing device (also called a yaw rate sensing device). It produces a positive going output voltage for clockwise rotation about the axis normal to the package top, that is, clockwise when looking down at the package lid. RATELONGITUDINALAXIS+17V CC = 5VGND06748-002Figure 2. RATEOUT Signal Increases with Clockwise RotationESD CAUTIONADXRS614Rev. 0 | Page 5 of 12PIN CONFIGURATION AND FUNCTION DESCRIPTIONS`RATIORATEOUTCCGFEDCBA765432106748-003Figure 3. Pin ConfigurationTable 4. Pin Function DescriptionsPin No. Mnemonic Description6D, 7D CP5 HV Filter Capacitor (0.1 n F). 6A, 7B CP4 Charge Pump Capacitor (22 nF). 6C, 7C CP3 Charge Pump Capacitor (22 nF). 5A, 5B CP1 Charge Pump Capacitor (22 nF). 4A, 4B CP2 Charge Pump Capacitor (22 nF). 3A, 3B AV CCPositive Analog Supply. 1B, 2A RATEOUT Rate Signal Output.1C, 2C SUMJ Output Amp Summing Junction. 1D, 2D NC No Connect.1E, 2E V RATIO Reference Supply for Ratiometric Output. 1F, 2G AGND Analog Supply Return.3F, 3G TEMP Temperature Voltage Output. 4F, 4G ST2 Self-Test for Sensor 2. 5F, 5G ST1 Self-Test for Sensor 1.6G, 7F PGND Charge Pump Supply Return. 6E, 7EV DDPositive Charge Pump Supply.ADXRS614Rev. 0 | Page 6 of 12TYPICAL PERFORMANCE CHARACTERISTICSN > 1000 for all typical performance plots, unless otherwise noted.1816141210864206748-004VOLTS% O F P O P U L A T I O N1.41.51.61.71.81.92.02.12.22.32.42.52.62.72.82.93.03.13.23.33.43.53.6Figure 4. Null Output at 25°C (V RATIO = 5 V)30–0.60.6–0.50.1–0.4–0.30–0.20.50.40.30.2–0.106748-005º/s/ºC% O F P O P U L A T I O N252015105Figure 5. Null Drift over Temperature (V RATIO = 5 V)5002206748-006mV/º/s% O F P O P U L A T I O N4540353025201510522.52323.52424.52525.52626.52727.528Figure 6. Sensitivity at 25°C (V RATIO = 5 V) 35006748-007DRIFT (%)% O F P O P U L A T I O N30252015105–10–9–8–7–6–5–4–3–2–1036895124710Figure 7. Sensitivity Drift over Temperature400–1.306748-008VOLTS% O F P O P U L A T I O N3530252015105–2.5–2.4–2.3–2.2–2.1–2–1.9–1.8–1.7–1.6–1.5–1.4Figure 8. ST1 Output Change at 25°C (V RATIO = 5 V)40006748-009VOLTS% O F P O P U L A T I O N3530252015105 2.51.3 1.4 1.5 1.6 1.7 1.8 1.92 2.1 2.2 2.32.4Figure 9. ST2 Output Change at 25°C (V RATIO = 5 V)ADXRS614Rev. 0 | Page 7 of 121405054586266707478828690949806748-010º/s% O F P O P U L A T I O N12108642Figure 10 .Measurement Range2.5–2.5–4012006748-011TEMPERATURE (ºC)V O L T S21.510.50–0.5–1–1.5–2–2020406080100Figure 11. Typical Self-Test Change over Temperature3006748-012(mA)% O F P O P U L A T I O N2520151053.73.83.94.04.14.24.34.44.52.52.62.72.82.93.03.13.23.33.43.53.6 Figure 12. Current Consumption at 25°C (V RATIO = 5 V) 40353025051015202.40 2.42 2.44 2.46 2.48 2.50 2.54 2.56 2.58 2.602.52% O F P O P U L A T I O NVOLTS06748-013Figure 13. V TEMP Output at 25°C (V RATIO = 5 V)3.33.12.92.71.52.11.91.72.32.5–40–2020406010012080V O L T STEMPERATURE (°C)06748-014Figure 14. V TEMP Output over Temperature (V RATIO = 5 V)605030401020–20–100750770810830850790g O R °/sTIME (ms)06748-015Figure 15. g and g × g Sensitivity for a 50 g , 10 ms PulseADXRS614Rev. 0 | Page 8 of 121.6010010k (Hz)(°/s )1k 1.41.21.00.80.40.20.606748-016Figure 16. Typical Response to 10 g Sinusoidal Vibration(Sensor Bandwidth = 2 kHz)4003002001000–100–200–300–400(ms)(°/s )06748-017Figure 17. Typical High g (2500 g ) Shock Response(Sensor Bandwidth = 40 Hz)10.10.010.0010.010.1100k10k 1k 100101AVERAGE TIME (Seconds)(°/s r m s )06748-018Figure 18. Typical Root Allan Deviation at 25°C vs. Averaging Time 0.10–0.050.05–0.10TIME (Hours)(°/s )06748-019Figure 19. Typical Shift in 90 sec Null Averages Accumulatedover 140 Hours0.100.05–0.05–0.10036001800120030002400600TIME (Seconds)(°/s )06748-020Figure 20. Typical Shift in Short Term Null (Bandwidth = 1 Hz)0.10.0010.010.000110100k1k 100(Hz)(°/s / H z r m s )10k 06748-021Figure 21. Typical Noise Spectral Density (Bandwidth = 40 Hz)ADXRS614Rev. 0 | Page 9 of 12THEORY OF OPERATIONThe ADXRS614 operates on the principle of a resonator gyro. Two polysilicon sensing structures each contain a dither frame that is electrostatically driven to resonance, producing the necessary velocity element to produce a Coriolis force during angular rate. At two of the outer extremes of each frame, orthogonal to the dither motion, are movable fingers that are placed between fixed pickoff fingers to form a capacitive pickoff structure that senses Coriolis motion. The resulting signal is fed to a series of gain and demodulation stages that produce the electrical rate signal output. The dual-sensor design rejects external g -forces and vibration. Fabricating the sensor with the signal conditioning electronics preserves signal integrity in noisy environments.The electrostatic resonator requires 18 V to 20 V for operation. Because only 5 V are typically available in most applications, a charge pump is included on-chip. If an external 18 V to 20 V supply is available, the two capacitors on CP1 through CP4 can be omitted and this supply can be connected to CP5 (Pin 6D, Pin 7D). Note that CP5 should not be grounded when power is applied to the ADXRS614. Although no damage occurs, under certain conditions the charge pump may fail to start up after the ground is removed without first removing power from the ADXRS614.SETTING BANDWIDTHExternal Capacitor C OUT is used in combination with the on-chip R OUT resistor to create a low-pass filter to limit the bandwidth of the ADXRS614 rate response. The –3 dB frequency set by R OUT and C OUT is:()OUT OUT OUT C R f ×××=π21and can be well controlled because R OUT has been trimmed during manufacturing to be 200 kΩ ±1%. Any external resistor applied between the RATEOUT pin (1B, 2A) and SUMJ pin (1C, 2C) results in:()()EXT EXT OUT R R R +×=kΩ200kΩ200In general, an additional hardware or software filter is added to attenuate high frequency noise arising from demodulation spikes at the gyro’s 14 kHz resonant frequency (the noise spikes at 14 kHz can be clearly seen in the power spectral density curve shown in Figure 21). Typically, this additional filter’s corner frequency is set to greater than 5× the required bandwidth to preserve good phase response.Figure 22 shows the effect of adding a 250 Hz filter to the output of an ADXRS614 set to 40 Hz bandwidth (as shown in Figure 21). High frequency demodulation artifacts are attenuated by approximately 18 dB.0.10.010.0000010.000010.00010.00110100k1k 100(Hz)(°/s/ H z r m s )10k 06748-022Figure 22. Noise Spectral Density with Additional 250 Hz FilterTEMPERATURE OUTPUT AND CALIBRATIONIt is common practice to temperature-calibrate gyros to improve their overall accuracy. The ADXRS614 has atemperature proportional voltage output that provides input to such a calibration method. The temperature sensor structure is shown in Figure 23. The temperature output is characteristically nonlinear, and any load resistance connected to the TEMP output results in decreasing the TEMP output and temperature coefficient. Therefore, buffering the output is recommended. The voltage at the TEMP pin (3F, 3G) is nominally 2.5 V at 25°C and V RATIO = 5 V . The temperature coefficient is ~9 mV/°C at 25°C. Although the TEMP output is highly repeatable, it has only modest absolute accuracy.6748-023V TEMPFigure 23. ADXRS614 Temperature Sensor StructureCALIBRATED PERFORMANCEUsing a 3-point calibration technique, it is possible to calibrate the null and sensitivity drift of the ADXRS614 to an overall accuracy of nearly 200°/hour. An overall accuracy of 40°/hour or better is possible using more points.Limiting the bandwidth of the device reduces the flat-band noise during the calibration process, improving the measurement accuracy at each calibration point.ADXRS614 AND SUPPLY RATIOMETRICITYThe ADXRS614 RATEOUT and TEMP signals are ratiometric to the V RATIO voltage, that is, the null voltage, rate sensitivity, and temperature outputs are proportional to V RATIO . Thus, theADXRS614 is most easily used with a supply-ratiometric ADC that results in self-cancellation of errors due to minor supply variations. There is some small error due to nonratiometricADXRS614Rev. 0 | Page 10 of 12behavior. Typical ratiometricity error for null, sensitivity, self-test, and temperature output is outlined in Table 3. Note that V RATIO must never be greater than AV CC.Table 3. Ratiometricity Error for Various ParametersParameter V S = V RATIO = 4.75 V V S = V RATIO = 5.25 V ST1 Mean −0.4% −0.3% Sigma 0.6% 0.6% ST2 Mean −0.4% −0.3% Sigma 0.6% 0.6% Null Mean −0.04% −0.02% Sigma 0.3% 0.2% SensitivityMean 0.03% 0.1% Sigma 0.1% 0.1% V TEMPMean −0.3% −0.5% Sigma 0.1%0.1%NULL ADJUSTMENTThe nominal 2.5 V null is for a symmetrical swing range at RATEOUT (1B, 2A). However, a nonsymmetrical output swing may be suitable in some applications. Null adjustment ispossible by injecting a suitable current to SUMJ (1C, 2C). Note that supply disturbances may reflect some null instability.Digital supply noise should be avoided particularly in this case.SELF-TEST FUNCTIONThe ADXRS614 includes a self-test feature that actuates each of the sensing structures and associated electronics as if subjected to angular rate. It is activated by standard logic high levelsapplied to Input ST1 (5F, 5G), Input ST2 (4F, 4G), or both. ST1 causes the voltage at RATEOUT to change about −1.9 V , and ST2 causes an opposite change of +1.9 V . The self-test response follows the viscosity temperature dependence of the package atmosphere, approximately 0.25%/°C.Activating both ST1 and ST2 simultaneously is not damaging. ST1 and ST2 are fairly closely matched (±5%), but actuating both simultaneously may result in a small apparent null bias shift proportional to the degree of self-test mismatch. ST1 and ST2 are activated by applying a voltage of greater than 0.8 × V RATIO to the ST1 and ST2 pins. ST1 and ST2 aredeactivated by applying a voltage of less than 0.2 × V RATIO to the ST1 pin and the ST2 pin. The voltage applied to ST1 and ST2 must never be greater than AV CC .CONTINUOUS SELF-TESTThe one-chip integration of the ADXRS614 gives it higher reliability than is obtainable with any other high volumemanufacturing method. In addition, it is manufactured under a mature BiMOS process with field-proven reliability. As anadditional failure detection measure, a power-on self-test can be performed. However, some applications may warrant continuous self-test while sensing rate. Details outliningcontinuous self-test techniques are also available in a separate application note.ADXRS614Rev. 0 | Page 11 of 12OUTLINE DIMENSIONSBALL DIAMETER*BALL A1 IDENTIFIER IS GOLD PLATED AND CONNECTED TO THE D/A PAD INTERNALLY VIA HOLES.060506-AFigure 24. 32-Lead Ceramic Ball Grid Array [CBGA](BG-32-3)Dimensions shown in millimetersORDERING GUIDEModelTemperature Range Package Description Package OptionADXRS614BBGZ 1–40°C to +105°C 32-Lead Ceramic Ball Grid Array (CBGA) BG-32-3 ADXRS614BBGZ-RL 1–40°C to +105°C 32-Lead Ceramic Ball Grid Array (CBGA) BG-32-3EVAL-ADXRS614Z 1Evaluation Board1Z = RoHS Compliant Part.ADXRS614Rev. 0 | Page 12 of 12NOTES©2007 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners.D06748-0-4/07(0)。
4200编程手册

ALCATEL 4200 D/E裝機手冊ALCATEL 4200 D/E裝機手冊 (1)1.系統簡介 (4)1.1.ALCATEL4200E系統簡介 (4)1.1.1.系統外觀 (4)1.1.1.1.ALCATEL 4200E外觀如圖所示,有三種容量: (4)1.1.2.硬體介紹 (5)1.1.3.PS16 Board (7)1.1.4.CM Board (8)1.1.4.1.MMC連接埠接腳圖 (8)1.1.5.AC Board (9)1.1.6.M32E , MM32E , MM32P , M32 Board (10)1.1.6.1.X3 : definition of the type of EPROM used (10)1.1.6.2.X7, X8 : connectors for the AC board (11)1.1.7.TLC2 / TLC4 Board (11)1.1.8.S0T04 / S0T08 Board (12)1.1.9.SLC2-SLC4-SLC8 Board(類比單機介面) (13)1.1.9.1.Maximum station distance<-> wall cabinet (LY 0.5 cable) (13)1.1.10.DLC4-DLC8-DLC16 Board (14)1.1.11.ATL Board(2W E&M ) (15)1.2.ALCATEL4200D系統簡介 (16)1.2.1.系統外觀 (16)1.2.2.硬體介紹 (17)1.2.3.PS4 Board (18)1.2.4.CPU/SMB Board (19)1.2.5.BBM Board (20)1.2.6.BBZ Board (20)1.2.7.EBR Board (21)1.2.8.EBZ Board(單機擴充板) (22)1.2.9.ITB Board(ISDN外線介面卡) (23)1.2.10.ATB Board(類比外線卡) (24)1.2.11.AUX Board(附屬配備卡) (25)1.2.12.IVPS Board(語音信箱介面卡) (26)1.2.13.IDB32 Board(配線板) (27)1.2.14.IDB48 Board(配線板) (28)1.2.15.ALCATEL UA3G Reflexes話機 (30)1.2.16.DECT Handset (30)1.2.17.DECT IBS Wiring (31)1.2.17.1.Cables: (32)1.3.電力需求與系統環境 (32)2.ALCATEL 4200D/E裝機程序 (33)2.1.前置作業 (33)2.2.系統軟體設定 (34)2.2.1.如何安裝PC-MMC (34)2.3.使用精靈模式開始裝機 (35)2.4.PCMMC M ODE設定 (46)2.4.1.Numbering(編碼計劃) (48)2.4.1.1.Collective Speed Dial (系統簡撥) (48)2.4.1.2.Internal Numbering Plan ( Internal編碼計劃) (50)2.4.1.3.Public Numbering Plan( Public編碼計劃) (52)2.4.1.4.Feature In Conversation (通話中使用之功能碼定義) (52)2.4.1.5.Splitting Table (外線撥號音偵測) (53)2.4.2.System (系統資料設定) (54)2.4.2.1.Date & Time(設定系統時間) (54)2.4.3.Traffic Sharing & Barring(長控表格及等級設定) (55)2.4.3.1.Memory R/W (系統參數設定) (58)2.4.3.2.Feature Design (58)2.4.4.Subscribers (分機相關資料設定) (58)2.4.4.1.Subscriber List(分機資料設定) (59)2.4.4.2.Features的設定 (61)2.4.4.3.Hunting Group(群代表號設定) (68)2.4.4.4.Broadcast Groups(內線群呼設定) (69)2.4.4.5.Pick Up Groups (代接群設定) (70)2.4.5.Trunks(外線資料設定) (71)2.4.5.1.Trunk List(個別外線資料設定) (71)2.4.5.2.Trunk Groups(外線群組設定) (73)2.4.5.3.Protocol(外線參數設定) (74)2.4.6.Maintenance(僅適用4200E) (75)2.4.7.File (客戶資料儲存) (76)1. 系統簡介1.1. ALCATEL 4200E 系統簡介1.1.1. 系統外觀1.1.1.1. ALCATEL 4200E 外觀如圖所示,有三種容量: (S 型、 M 型、 L 型)BP10XMODEL MMODEL SMODEL L單位:cm1.1.2. 硬體介紹1.1.3. PS16 Board1.1.4. C M Board表 一1.1.4.1. MMC 連接埠接腳圖CM1_1 PC X8 9 pins Pin 2-----------3Pin 3 ----------- 2 Pin 5 ----------- 51.1.5. A C Board註:1、CPU若有Downloading功能,則需有AC_DL Board,CM1-1則需有M1M-DL1,2顆EPROM只有L1及U1(BOOT ROM)2、CPU若無Downloading功能,則無AC_DL Board,CM1-1需有10顆EPROM(L1~L4,U1~U4)及MEBXXX卡(如下表)3、有Downloading功能時可由PC執行DOWNLOAD直接進行版本更新無Downloading功能時則需更換EPROM方能進行版本更新1.1.6. M32E , MM32E , MM32P , M32 Board1.1.6.1. X3 : definition of the type of EPROM used●jumper across 1-2 : position not used (2 x 256 K)●jumper across 2-3 : 2 x 128 K (ex-works configuration)X4 : 4 pin BURNDY connector for connection of an external tape recorder transmitting the “pleasewait” message●1-ATR1 and 2-ATR2 : tape recorder startup commands●3-Audio+ and 4-Audio- : tape recorder modulation outputs1.1.6.2. X7, X8 : connectors for the AC board1.1.7. T LC2 / TLC4 BoardCO TRUNK請接L1、L2 (pin 2、3)●Standard line (distance > 1.5 km) : fit the following jumpers :X50 and X11 (1st interface)X8 and X14 (2nd interface)X12 and X23 (3rd interface)X34 and X46 (4th interface)●Short line (distance < 1.5 km) : fit the following jumpers :X49 and X47 (1st interface)X26 and X13 (2nd interface)X10 and X18 (3rd interface)X39 and X20 (4th interface)1.1.8. S0T04 / S0T08 Board1.1.9. S LC2-SLC4-SLC8 Board(類比單機介面)1.1.9.1. Maximum station distance<-> wall cabinet (LY 0.5 cable)●up to 750 ohms of line resistance (station not included) Interface characteristics●Station power supply voltage :-48 V=●Ringer voltage : 100 V=●Balancing impedance : 600 ohms1.1.10. DLC4-DLC8-DLC16 BoardDLC16 話機接腳圖DLC4/8 話機接腳圖1.1.11. ATL Board(2W E&M )1.2. ALCATEL 4200D系統簡介1.2.1. 系統外觀1.2.2. 硬體介紹1.2.3. PS4 Board調整電壓為110V1.2.4. C PU/SMB Board註一:系統軟體更新時,先置入SWC 卡,然後先按住此鍵,再打開電源約10秒後,才鬆開此鍵系統即自動更新軟體,約需10分鐘。
HLD-GC 100电罗经系统操作手册_中文
用户在使用本设备的同时也需要遵守并 执行国际/国内相关规定中定义的安全警告和 安全检查!
安全指导
“警告”、“小心”和“注意”等注意事项在手册中经常出现。使用者需要仔 细阅读、理解这些注意事项,并在操作的过程中认真遵守。如果您对于安全指导 有任何问题,请联系海兰信!
3 术语与定义................................................................................................................. 39
1 系统介绍
北京海兰信数据科技股份有限公司
1.1 概述
部件号:4200000A0
文档编号 文件版本 发布日期
HLD4200CZ V1.0
2013-07-19
北京海兰信数据科技股份有限公司
版本
日期 版本号
2011-12-15 V0.1 2012-04-20 V0.2 2013-07-19 V1.0
发布者
刘晓飞 陈林 赵亚杰
描述
创建 创建 创建
重要安全提示
操作过程中需警惕: 不要触碰或身体接触有源电路!
必须严格遵守所有相关的安全规则和标 准!
遵守操作规则! 在带电情况下,移除、插入子部件或印 制线路板将导致严重伤害。
保险丝的更换要符合要求,不要插入与 实际规格不符的保险丝。
目录
1 系统介绍....................................................................................................................... 1 1.1 概述............................................................................................................................ 1
L3G4200D芯片中文资料

陀螺仪芯片意法半导体(ST)近日推出一款业界独创、采用一个感应结构检测3 条正交轴向运动的3 轴数字陀螺仪L 3 G 4 2 0 0 D 。
这种创新的设计概念大幅提升运动控制式消费电子应用的控制精度和可靠性,为设备的用户界面实现前所未有的现场感。
现有的3轴陀螺仪解决方案依赖两个或3个独立的感应结构,顶多是在同一硅基片上;而意法半导体的陀螺仪则是3轴共用一个感应结构,这一突破性概念可以消除轴与轴之间的信号干扰,避免输出信号受到干扰信号的影响。
此外,这个创新的产品架构使意法半导体的工程师将传感器与ASIC接口整合在一个4mmx4mmx1mm的超小封装内,解决现在和未来的消费电子应用的空间限制问题。
意法半导体的3轴数字陀螺仪让用户可以设定全部量程,量程范围从±250 dps ~±2000 dps,低量程数值用于高精度慢速运动测量,而高量程则用于测量超快速的手势和运动。
这款器件提供一个16位数据输出,以及可配置的低通和高通滤波器等嵌入式数字功能。
就算时间推移或温度变化,这款器件仍然保持连续稳定的输出。
内置数字输出的L3G4200D 3轴MEMS陀螺仪的设计和制造采用意法半导体销售量超过6亿支的运动传感器的制程技术。
新产品定于2010年第二季度末开始量产。
L3G4200D特性(ST)100元2010●三种可选全尺度(±250/500/2000存保计划)●I2C/SPI数字输出接口●16比特率值的数据输出●8比特温度数据输出●两个数字输出线(中断和data ready)●集成低和高通滤波器的用户可选带宽●在时间和温度上平稳●嵌入式self-test●宽电源电压,2.4 V到3.6 V●低电压兼容的IOS,1.8 V●嵌入式power-down和睡眠模式●嵌入式温度传感器●嵌入式FIFO缓存●高抗撞击能力●扩展的工作温度范围(-40 °C到+85 °C)●ECOPACK® RoHS 和“Green”认证一、寄存器1.控制寄存器CTRL_REG1(地址:20H):选择输出数据速率,带宽,X、Y、Z轴使能DR1-DR0 输出速率选择,BW1-BW0带宽选择见表CTRL_REG2(地址:21H):选择高通滤波模式和高通截止频率CTRL_REG3(地址:22H):中断使能CTRL_REG3CTRL_REG4(地址:23H):选择量程CTRL_REG5(地址:24H):FIFO使能,高通滤波使能STATUS_REG(地址:27H):状态寄存器,ZYXDA=1时,数据已准备好,可读。
l3g4200 三轴数字陀螺仪及评估板资料5

UM1049User manualUnico GUI: software guideIntroductionThe Unico graphical user interface (GUI) is a complete software which provides a user-friendly interface able to show the main characteristics of each MEMS sensor available inthe STMicroelectronics portfolio, such as accelerometers, gyroscopes, and magnetometers.Unico interacts with all the MEMS demonstration boards and allows a quick and easy set-upof the sensors as well as the complete configuration of all the registers and the advancedfeatures embedded in the digital output devices. It also visualizes the output of the sensorsin both graphical and numeric format; it's also possible to save or generally manage datacoming from the device.This user manual describes all the functions of the Unico GUI. For details regarding thefeatures of each sensor, please refer to the related device datasheet.March 2011Doc ID 18426 Rev 11/24Contents UM1049Contents1PC System requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Unico graphical user interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.1“Options” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2“Register set-up” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3“Bars” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4“Plot” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5“Data” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.6“Inclinometer” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.7“Map browsing” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.8“Interrupt” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.9“6 D” directions tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.10“Portrait/landscape” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.11“Compass” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.12“Click Click” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.13“FIFO” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.14“Load/save” tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3Data acquisition quick start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 4Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232/24Doc ID 18426 Rev 1UM1049List of figures List of figuresFigure 1.Graphical user interface: select demonstration board window. . . . . . . . . . . . . . . . . . . . . . . 5 Figure 2.Graphical user interface: main window. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Figure 3.Options tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Figure 4.Registers tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 Figure 5.Bars tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 Figure 6.Plot tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 Figure 7.Data tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 Figure 8.Inclinometer tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Figure 9.Axis inclination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Figure 10.Map browsing tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Figure 11.Interrupt tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 Figure 12. 6 D direction tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 Figure 13.Portrait/landscape tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Figure pass tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Figure 15.Click click tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 Figure 16.FIFO tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 Figure 17.Load/save tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Doc ID 18426 Rev 13/24PC System requirements UM1049 1 PC System requirementsUnico software has been designed to operate with Microsoft® Windows Platforms. Microsoft.NET Framework 3.5 needs to be installed on the PC.4/24Doc ID 18426 Rev 1UM1049Unico graphical user interface 2 Unico graphical user interfaceTo install the Unico GUI, launch “Unico_Setup.exe” included in the package under the “GUI”folder and follow the instructions that appear on the screen. T o launch the software, select“Start > STMicroelectronics > Unico > Unico.exe”.The Unico GUI is included in the software package under the “/bin” folder. It has beenstructured to support different MEMS demonstration boards. Some of the TABsimplemented in the GUI are available for most of the sensors (e.g.: options, registers, plot,bars) and others, on the other hand, are available just for specific MEMS demonstrationboards (e.g.: the compass tab for LSM303DLH).The basic concepts described below are also suitable for different sensors. In the case ofgyroscopes, for instance, some tabs are present but show angular rate data instead ofaccelerations and others are hidden depending of the functions available on the sensor.To execute the Unico software GUI:1.Plug the board into the PC through a USB port2. Click on Start > All Programs > STMicroelectronics > Unico > Unico3. The GUI finds the COM port automatically. The GUI “Select Demonstration Board”window appears, as shown in Figure1. The GUI shows the list of adapter boards anddemonstration kits supported by the current release. Select the board currently in usefrom the list and then click on the “Select” button. The main window appears after a fewseconds (Figure2). A brief description of the selected sensor can be obtained byclicking on the “Description” button.Figure 1.Graphical user interface: select demonstration board windowDoc ID 18426 Rev 15/24Unico graphical user interfaceUM10496/24Doc ID 18426 Rev 1The functions available in the Unico GUI are described in the following sections:1.“Main Control” (Figure 2, ref 1) connects/disconnects the board, easy connect, start/stop acquisition buttons, and load/save button.2. “T ab Selector” (Figure 2, ref 2) is used to toggle between the different features of thedemonstration kit.Table 1 below indicates the supported tabs for each demonstration board/device.!- VTable 1.Device vs supported tabsSTEVAL # (device)O p t i o n sR e g i s t e r s e t u pB a r sP l o tD a t aI n c l i n o m e t e rM a p b r o w s i n g I n t e r r u p t6DP o r t r a i t /l a n d s c a p eC o m p a s sC l i c k c l i c k F I F OSTEVAL-MK I005V1(LIS3LV02DL)X X X X X X X X STEVAL-MK I006V1(LIS302DL)X X X X X X X X X STEVAL-MK I009V1(LIS3LV02DL)X X X X X X X X STEVAL-MK I013V1(LIS302DL)X XX X X X X XX STEVAL-MK I015V1(LIS344ALH)X XX X X X STEVAL-MKI022V1 (LIS331DLH)X X X X X X X X XSTEVAL-MK I024V1(LIS331DL)X X X X X X X X XSTEVAL-MK I027V1 (LIS331DLF)XXXXXXXXXXDoc ID 18426 Rev 17/24STEVAL-MK I056V1(LIS33DE)X X X X X X X X STEVAL-MK I057V1 (LIS35DE)X X X X X X X X X STEVAL-MKI063V1 (LSM303DLH)X XX X X XXXXXXSTEVAL-MKI082V1 (LPY4150AL)X X X X STEVAL-MKI083V1 (LPY450AL)X X X X STEVAL-MKI085V1 (LPY410AL)X X X X STEVAL-MKI086V1 (LPY403AL)X XX X STEVAL-MK I087V1 (LIS331DL)X X X X X X X X X STEVAL-MK I088V1 (LIS33DE)X X X X X X X X STEVAL-MKI089V1 (LIS331DLH)X X X X X X X X X STEVAL-MK I090V1 (LIS331DLF)X X X X X X X X X X STEVAL-MK I091V1(LIS331DLM)X X X X X X X X X X STEVAL-MK I092V1(LIS331HH)X XX X X XXXXXSTEVAL-MKI095V1 (LPR4150AL)X X X X STEVAL-MKI096V1 (LPR450AL)X X X X STEVAL-MKI097V1 (LPR430AL)X X X X STEVAL-MKI098V1 (LPR410AL)X X X X STEVAL-MKI099V1 (LPR403AL)X X X X STEVAL-MKI103V1 (LPY410AL)X XX X STEVAL-MKI105V1 (LIS3DH)X X X X X X X X X XXX STEVAL-MKI107V1 (L3G4200D)X X X X X XXSTEVAL-MK I110V1(AIS328DQ)X X X X X X X X XSTEVAL-MKI112V1 (LPS001WP)XXXXXTable 1.Device vs supported tabsSTEVAL # (device)O p t i o n sR e g i s t e r s e t u pB a r sP l o tD a t aI n c l i n o m e t e rM a p b r o w s i n gI n t e r r u p t6DP o r t r a i t /l a n d s c a p eC o m p a s sC l i c k c l i c k F I F Otab2.1 “Options”The options tab allows the user to control the main parameters of the selected sensor. Thecontent of the tab depends on the sensor chosen. The following parameters refer to a 3-axisdigital accelerometer plus a 3-axis digital magnetometer:1.Accelerometer’s full scale (FS) - sets the maximum acceleration value measurable bythe device (Figure3, ref 1)2. Accelerometer’s operating mode (OM) - this control allows the user to select theoperating mode (e.g. normal mode or power down mode) (Figure3, ref 2)3. Accelerometer’s block data update (BDU) - this function is used to inhibit the outputregisters update between the reading of upper and lower register parts. After thereading of the lower (upper) part, the content of that output register is not updated untilthe upper (lower) part is read too (Figure3, ref 3)4. Accelerometer’s big/little-endian (BLE) - used to select big-endian or little-endianrepresentation for output registers when data output is higher than 8 bits. In big-endianrepresentation the MSB acceleration value is located at the lower output address (e.g.0x28h for X-axis) and LSB is located at the higher output address (e.g. 0x29h). In little-endian representation the order is inverted (Figure3, ref 4)5. Accelerometer’s high-pass filter (HP) - this control activates the high-pass filter on thedevice and selects the cut-off frequency (Figure3, ref 5)6. Magnetometer’s full scale (FS) - sets the maximum magnetic field measurable by thedevice (Figure3, ref 6)7. Magnetometer’s data rate (ODR) - sets the magnetometer output data rate (Figure3,ref 7)8. Magnetometer’s operating mode - this control allows the user to select the operatingmode (e.g. normal measurement) (Figure3, ref 8).REF8/24Doc ID 18426 Rev 1Doc ID 18426 Rev 19/242.2 “Register set-up” tabThe register set-up tab shown in Figure 4 allows read/write access to the content of theregisters embedded in the MEMS sensor mounted on the demonstration kit. The tab is divided into three sections:1.“General” (Figure 4, ref 1) - provides access to the registers which control the main settings of the device. This section contains the control registers and the registers that manage the generation of interrupt signals when available. It is possible to read and write the contents of each register. To read the default value for a given register, press the “Default” button (in this case no data is written in the register, to do this please click the “Write” button).2.“Registers Direct Access” (Figure 4, ref 2) - provides access to any register in the device. T o read a generic register, insert the address value in the “Register Address” text box, then click on the “Read” button. The retrieved content of the register is displayed in the “Register Value” field. As with writing to a register, the user must specify the address and the data to be written inside the fields marked “RegisterAddress” and “Register Value”, respectively, and then press the “Write” button. “Read All”, “Write All”, and “Default All” perform the same functions but for all registers at the same time.3.“Easy Configuration” - this button provides the user with the possibility to choose a default configuration allowing an easy start. When pressed, the sensor register is configured with default parameters (Figure 4 ref 3).tab2.3 “Bars”The bars tab (Figure5) displays the data measured by the sensor in bar chart format. Forinstance, in the case of a 6-axis module, the accelerations along the X, Y, and Z axescorrespond respectively to the red, green, and blue bars and magnetic values along X, Y,and Z axes are magenta, light blue, and yellow, respectively.The height of each bar is determined by the amplitude of the signal measured by the sensoralong the related axis. The full scale of the graph depends on the full scale selected and canbe changed through both the option (Figure3, ref 1) and the register set-up tabs (Figure4,ref 1, ref 2).Figure 5.Bars tab10/24Doc ID 18426 Rev 12.4 “Plot”tabThe plot tab shows the evolution of the output in time domain. Figure6 shows the sequenceof acceleration and magnetometer samples that have been measured by the 6-axis modulemounted on the demonstration kit.If the selected device contains just the accelerometer, the magnetic part is hidden. In thecase of gyroscopes, the plot shows the angular rates.Figure 6.Plot tabDoc ID 18426 Rev 111/2412/24Doc ID 18426 Rev 12.5 “Data” tabThe data tab (Figure 7) shows the output values measured by the sensor connected to thedemonstration board. For a 6-axis module device, it is divided into the following sections:1.“ADC Data” (Figure 7, ref 1) - displays acceleration and magnetic data provided by thesensor after its conversion from 2’s complement to magnitude and sign expressed inLSB.2. “Physical Data” (Figure 7, ref 2) - represents the acceleration/magnetic data measuredby the sensor, expressed in the related unit of measurements.3. “Azimuth” (Figure 7, ref 3) - displays the azimuth calculated using magnetic field data.4. “Angle” (Figure 7, ref 4) - returns the tilt angle, expressed in degrees, that is inferredfrom the ADC Data.Note:To increase data readability, the values shown in the boxes and described above are basedon an average of 50 samples.!- VREF REF REF REF2.6 “Inclinometer”tabThe inclinometer tab (Figure8) represents the acceleration data measured by the sensor inthe form of an artificial horizon. This tab is available if the used sensor integrates anaccelerometer, otherwise it is hidden.Figure 8.Inclinometer tabDoc ID 18426 Rev 113/2414/24Doc ID 18426 Rev 12.7 “Map browsing” tabThe map browsing tab demonstrates the possibility of using the acceleration data obtainedfrom the sensor to scroll a map (or another type of document) on the screen.Figure 10.Map browsing tabTo move the map on the screen, the user must tilt the demonstration kit.Figure 10 (a) illustrates:1.A tilt along the X-axis (roll) causes the map to move in a left/right direction on the screen.2. A tilt along the Y -axis (pitch) causes the map to move in an up/down direction on thescreen.Figure 10 (b) shows an example. The board is tilted along the X-axis (positive roll) and themap on the screen is moved to the right.!- VDE2.8 “Interrupt”tabThe interrupt tab (Figure11) provides a tool for evaluating the interrupt generation featuresof the MEMS sensor. In this section of the GUI it is possible to configure the characteristicsof the inertial events that must be recognized by the device and to visualize, in real time, thelevel of the two interrupt lines together with the acceleration signals that are measured bythe device.The GUI provides direct access to the registers (INT_CFG, INT_SRC, THS and duration)that allow the configuration (Figure11, ref 2) of the two independent interrupt sources of thedevice. Conversion labels are located on the center of the tab (Figure11, ref 1). Theselabels are intended to show, respectively, the threshold value expressed in mg and theduration value converted in ms for better readability and understanding.Finally, two buttons are provided for each interrupt line to set the suggested default valuesfor free-fall and wake-up detection (Figure11, ref 3).Doc ID 18426 Rev 115/242.9 “6 D” directions tabThe 6D directions tab (Figure12) gives an example of the use of the “6D Position” function.In this tab it is possible to configure the interrupt with the related registers (INTx_CFG,INTx_THS, INTx_DURATION) (Figure12, ref 2) manually or using a default configuration byclicking the “Set Value” button (Figure12, ref 1). In this example INT1 has been configured.Referring to Figure12, the teapot (Figure12, ref 3) changes its orientation according toINT1_SRC content.If no position has been recognized, INTx_SRC is equal to 0x00h and the message“Undefined Position” appears.16/24Doc ID 18426 Rev 12.10 “Portrait/landscape”tabThis tab shows an example of the portrait/landscape function. The image shown on thescreen of the mobile phone (Figure13) is always horizontal regardless of the orientation ofthe device. This features is available when the sensor integrates an accelerometer.Figure 13.Portrait/landscape tabDoc ID 18426 Rev 117/24tab2.11 “Compass”This tab shows an example of the compass feature (Figure14, ref 3) which can beimplemented using the 6-axis module (3-axis accelerometer and 3-axis magnetometer).The algorithm uses the magnetometer data to measure the earth’s magnetic field and theaccelerometer data to compensate the board inclination. Rotating the board, the GUI showsthe heading of the compass (Figure14, ref 1). Before using the compass demo, the systemmust be calibrated by moving the board randomly for a few seconds; the quality of thecalibration step is indicated by a colored bar (Figure14, ref 2). A green colored bar meansthat the quality of the calibration is optimal.18/24Doc ID 18426 Rev 12.12 “Click Click” tabThis tab allows the possibility to test the click and double click features embedded in thedevice (when available). See the device datasheet for more details.In order to test these features, “Set Value” buttons can be used to set the registers for theclick/double click configuration (Figure15, ref 1). “Restore Value” buttons allow therestoration of the previous register values. The GUI allows the user to configure the click ordouble click also by changing the registers content manually accordingly to user needs(Figure15, ref 2). As soon as the device is configured, the user can tap/double tap onto theboard and once the click or double click is recognized by the sensor, the green circle isswitched on (Figure15, ref 3).Doc ID 18426 Rev 119/242.13 “FIFO”tabThis tab can be used to test the FIFO feature embedded in the device (when supported bythe sensor). See the device datasheet for more details.By using the buttons available in the tab (Figure16, ref 1), the FIFO can be configured in allthe modalities supported (e.g.: Bypass, FIFO, Stream, Stream To FIFO). The GUI alsoshows the values of X, Y, and Z stored in the 32-byte deep FIFO.20/24Doc ID 18426 Rev 1UM1049Unico graphical user interfaceDoc ID 18426 Rev 121/242.14 “Load/save” tabThis tab, positioned inside the “Main Control” section, allows the user to save a stream ofsensor output data in a text file, available for possible post-processing (Figure 17, ref 1). It ispossible to select which data must be stored; the “Browse” button is used to select/insert thetext file name, then the “Start” and “Stop” buttons define the acquisition period.It’s also possible to save the ongoing registers configuration by clicking on the “Save” buttonand load it in a successive moment by clicking on the “Load” button (Figure 17, ref 2).Data acquisition quick start UM1049 3 Data acquisition quick startThis section describes the basic steps that must be performed to acquire the data from thedemonstration board:1.Plug the demonstration board into the USB port2. Start the Unico GUI3. Select the STEVAL-MKI according to the device/demonstration board in use (Figure1)4. Go to the “Registers” tab and click on “Easy Configuration” (Figure4, ref 3)5. Use the tab menu (Figure2, ref 2) to display the desired function6. Click on the “Start” (or “Stop”) button to activate (or stop) the sensor data collection,saving to file, and screen plotting functions7. To close the application, click on “Disconnect” and then click on “Exit.”22/24Doc ID 18426 Rev 1UM1049Revision history Doc ID 18426 Rev 123/244 Revision historyTable 2.Document revision history DateRevision Changes02-Mar-20111Initial release.UM1049Please Read Carefully:Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any time, without notice.All ST products are sold pursuant to ST’s terms and conditions of sale.Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no liability whatsoever relating to the choice, selection or use of the ST products and services described herein.No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such third party products or services or any intellectual property contained therein.UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY, DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any liability of ST.ST and the ST logo are trademarks or registered trademarks of ST in various countries.Information in this document supersedes and replaces all information previously supplied.The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.© 2011 STMicroelectronics - All rights reservedSTMicroelectronics group of companiesAustralia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan - Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America24/24Doc ID 18426 Rev 1。
钻井倾斜角及方位角微机测量仪

本科生毕业设计钻井倾斜角及方位角微机测量仪digital instrument of dip angle and azimuth of drilling学生姓名霍兆权所在专业电气工程及其自动化所在班级电气1081申请学位工学学士指导教师刘丹职称副教授副指导教师职称答辩时间2012 年 6 月 2 日目录设计总说明 (I)INTRODUCTION (II)第一章绪论 (1)1.1钻井测量系统研究的意义 (1)1.2钻井测量系统的国内外研究现状 (1)1.2.1国内钻井测量系统研究现状 (2)1.2.2国外钻井测量系统研究现状 (2)1.3本文主要的研究内容 (3)第二章系统总体设计 (4)2.1系统总体方案 (4)2.2传感器类型选择 (4)2.3单片机选择 (6)2.4数据传输方式选择 (7)第三章系统硬件设计 (8)3.1硬件设计整体方案 (8)3.2硬件各部分设计 (8)3.2.1单片机最小系统电路 (8)3.2.2USB-TTL驱动电路 (10)3.2.3T-Flash驱动电路 (11)3.2.4L3G4200D驱动电路 (12)3.2.5MMA7455驱动电路 (13)3.2.6电源电路 (14)第四章下位机软件设计及调试 (15)4.1下位机软件整体方案设计 (15)4.2软件各模块设计 (16)4.2.1STC12C5608AD的SPI模块 (16)4.2.2MMA7455读写模块 (18)4.2.3L3G4200D读写模块 (19)4.2.4T-Flash卡读写模块 (23)4.2.5内部EEPROM模块 (24)4.2.6串口通信及下位机通信协议模块 (26)4.2.7定时采集模块 (29)第五章上位机软件设计 (32)5.1上位机整体方案设计 (32)5.2上位机各模块设计 (33)5.2.1上位机界面设计及控件使用 (33)5.2.2串口接收数据和配置下位机 (33)5.2.3数据格式转换及存储 (35)5.2.4数据滤波 (36)5.2.5数据处理 (36)5.2.6出错处理 (38)第六章系统样机测试 (40)6.1系统样机测试总体方案 (40)6.2上位机和下位机联合测试 (40)6.2.1下位机数据校正和传输 (40)6.2.2下位机配置设置 (41)6.2.3上位机数据滤波及处理 (42)6.2.4出错处理调试 (42)第七章设计总结 (43)鸣谢 (44)参考文献 (45)附录 (46)附录 A (46)A1 元件清单 (46)A2 下位机原理图 (47)A3 系统硬件连接图 (48)附录 B (49)B1 下位机程序代码 (49)B2 上位机程序代码 (62)设计总说明数字化数据采集和存储可以提高数据的处理效率和可靠性,很多优秀的数据处理算法也可以比较方便的实现。
G3陀螺仪 说明书

G3 陀螺仪采用全数字化的参数设定方式,避免了因电位器机械磨损所造成的工作不稳 定现象。
【规格】
1. 外形尺寸:26mm*24mm*9mm
2. 重量:12g
3. 工作电压和电流:DC 4.5-6.5V,工作电流≈50mA,最大电流<100mA
4. 适用舵机:模拟舵机(频率 50Hz)、数码舵机(频率 333Hz),舵机中点 1520us
【免责声明】 模型运动本身具有一定的风险,该运动要求玩家具有一定的专业知识和技能。本产品在
设计时已经采取多重安全保护措施,但设备的工作环境和条件差别很大,无法完全预计。我 们强烈建议您尽可能为设备提供良好的安装和运行条件, 确保供电以及控制信号的稳定可 靠, 确认飞行场地的安全。 本公司不承担因使用陀螺仪而造成的直接及间接损失。本产品 一经拆封使用,视同您已认可以上全部条款。
罗托克IQ3完整中文调试手册

该手册提供了有关执行器设置和分析的说明。 我们重新组织了文件结构,将有关使用设置工具、 按键导航和密码安全的说明包含于第 1 部分,当按 照第 2 至第 5 部分中的要求进行设置和查看信息时 必须应用第 1 部分中的这些说明。 因此,在继续进行前,用户必须熟悉第 1 部分中所 含的操作。 应与执行器随附的 PUB002-039,IQ 系列安全使 用、安装、基本设置及维护手册结合阅读。
签发日期 2013 年 4 月
1. 简介
简介
1.1 使用 Rotork 设定工具
设定器用于连接至执行器、 浏览菜单、 更改设置和查看执行 器显示屏上所示的信息。 名称 1. 2. 3. 4. 5. 一般操作 键 键 键 键 键 向上滚动。 向下滚动/连接 减小数值/切换设置/向左滚动。 增大数值/切换设置/向右滚动。 选择加亮的项目。 保存加亮的设置。 停止执行器运行(当设定工具控制启用时, 参见第 2.3.1 部分) 。 6. 7. 键 键 返回上一个菜单。 在数据记录器力矩图上的标准和缩放视图 之间循环。 执行在 Rotork 蓝牙®设定器上存储的预设 值操作。 红外线发射机窗口。 键 向连接的执行器发送一个关闭命令 (当启用 时,参见 2.3.1) 。 向连接的执行器发送一个打开命令 (当启用 时,参见 2.3.1) 。
力矩跳断cltorquetripcl关方向力矩跳断任何位置力矩跳断optorquetripop开方向力矩跳断任何位置力矩跳断torquetrip开或关方向力矩跳断任何位行程中力矩跳断torquetripmid中间行程处力矩跳断开阀或电机失速motorstall在限位电机通电未检测到移动中间行程失速midtravelstall未在限位电机通电未检测到输出移动选择停止stopselected红色选择钮设置至停止选择就地localselected红色选择钮设置至就地选择远程remoteselected红色选择钮设置至远程控制报警controlalarmesd信号和或联锁动作监控器monitor监视继电器断电esd动作esdactive应用esd信号开阀联锁动作openinterlockactive开阀联锁动作关阀联锁动作closeinterlockactive关阀联锁动作联锁动作interlockactive开阀和或关阀联锁动作执行器报警actuatoralarm检测到内部故障电机过热motorovertemp电机温度保护跳断相位缺失lostphase相
三轴数字陀螺仪篇

还是刚才的那个行人,可是这回的情况不同了,这次他最后摔倒了。这个行人,他起初是在正常行走,一不留神,脚踩到一个西瓜皮,这个人挣扎了几下却无济于事,结果就摔到了。这种现象归类为自动跳位系统现象,如下面的流程图3-2所示。
图3-2 自纠正跳位系统图
当稳定的系统受到外界干扰的时候,系统就面临着失稳的风险。如果系统的自纠正能力在某一方面不是很强,那么它就会被另外的稳定态所代替。在这个例子里,正常行走的行人就是稳定态(A)。突然踩到一个西瓜皮代表一个很强的外界干扰因素随机性地进入系统,行人马上会四肢翻腾,这个翻腾的过程就是过度态。行人在拼命保持自己的重心,但是最后他还是摔倒了。摔倒后,坐在了地上就是稳定态(B)。我们把踩到西瓜皮的瞬间归类为跳出段,把四肢翻腾但是仍然倒下的过程归类为跳位段。
机器人衡态调整
三轴数字陀螺仪篇
北京森汉科技有限公司
一.硬件介绍
1
如下图1-1所示,三轴数字陀螺仪L3G4200D芯片X、Y、Z三轴互相正交分布。
图1-1 坐标方向及背面图
图1-1中明确标出了L3G4200D芯片X、Y、Z轴的坐标方向及背面图。本陀螺仪芯片可供用户选择其尺度量程,量程范围从 ±250 dps ~ ±2000 dps,低量程数值用于高精度慢速运动测量,而高量程则用于测量超快速的手势和运动。这款器件提供一个16位数据输出,以及可配置的低通和高通滤波器等嵌入式数字功能。就算时间推移或温度变化,这款器件仍然保持连续稳定的输出。
图3-3 陀螺仪应用系统图
1
在机器人行走过程中,当处在双腿着地某一姿态时,循环启动陀螺仪周期性地采集三轴数字陀螺仪的三轴数字值,紧接着存储在数组L3G4200D_dis_data[3]变量当中,并比较数组L3G4200D_dis_data[3]与对应设定角速度幅限值,依据是否超幅限值改变相应从0到11号舵机的值,调整机器人姿势使其保持当前姿态稳定。当机器人保持在其当前姿态时,就退出循环,继续行走,同样也依旧进入下一个姿态当中去。若在某一姿态的平衡状态被迫改变,就会同样进入循环当中,及时修正机器人的姿势。本调整程序工作逻辑方式是,快速反馈,快速回程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L3G4200D MEMS 运动传感器: 超稳定的三轴数字输出陀螺仪
特点
■三种可选的全尺度(250/500/2000DPS) ■I2C/SPI 数字输出接口 ■16 比特率值的数据输出 ■8 位温度数据输出 ■两个数字输出线(中断和数据就绪) ■集成的低和高通滤波器与用户可选择带宽 ■超稳定的温度和时间 ■宽电源电压:2.4 V 至 3.6 V ■低电压兼容的 IOS(1.8 伏) ■嵌入省电和睡眠模式 ■嵌入式温度传感器 ■嵌入式 FIFO(先入现出堆栈) ■高冲击的生存能力 ■扩展的工作温度范围(-40℃至+85℃) ■ECOPACK® RoHS 和“绿色”兼容
数字清单
图 1…框图………………………………………………………………………………… … 7 图 2…引脚连接………………………………………………………………………………… 7 图 3… L3G4200D 外部低通滤波器 值………………………………………………………………… … 8 图 4… SPI 从机时序图………………………………………………………………… … 12 图 5… I2C 从器件的时序图………………………………………………………………… … 13 图 6…框图………………………………………………………………………………… 16 图 7…旁路模式………………………………………………………………………………… 17 图 8… FIFO 模式………………………………………………………………………………… 17 图 9…流模式………………………………………………………………………………… 18 图 10…旁路流模式……………………………………………………………………… 18 图 11…触发流模式……………………………………………………………………… 19 图 12… L3G4200D 的电气连接和外部元件值……………………… … 20 图 13…读取和写入协议………………………………………………………………… 24 图 14… SPI 读协议…………………………………………………………………………… … 24 图 15…读多个字节 SPI 协议(2 个字节的例子)…………………………………………… … 25 图 16… SPI 写入协议…………………………………………………………………………… … 25
5.2.2 SPI 写………………………………25 5.2.3 SPI 读三线模式…………………………26 6 输出寄存器映射…………………………27 7 寄存器的描述…………………………29 7.1 WHO_AM_I(0FH)……………………………… … 29 7.2 CTRL_REG1(20H)……………………………… 29 7.3 CTRL_REG2(21H)……………………………… 30 7.4 CTRL_REG3(22H)……………………………… 31 7.5 CTRL_REG4(23H)……………………………… 32 7.6 CTRL_REG5(24 小时)……………………………… 32 7.7 参考/ DATACAPTURE(25H)……………………34 7.8 OUT_TEMP(26H)……………………………… 34
应用
■游戏和虚拟现实输入设备 ■运动控制与人机界面(人机接口) ■全球定位导航系统 ■家电和机器人技术
说明
L3G4200D 是一种低功耗三轴角 速率传感器能够提供前所未有的 安然的零利率水平和灵敏度超过 温度和时间…它包括一个传感 元素,并能够提供一个 IC 接口 外部世界的测角速率 通过数字接口(I2C/SPI)…
表 1…设备摘要
订购代码温度范Βιβλιοθήκη (℃)-40℃至+85
包装
包装
LGA-16 (4x4x1.1 mm托) 盘
磁带和卷轴
wjpccp亲译
2
wjpccp亲译
目录 1 框图和引脚说明……………………… 7 1.1 引脚说明……………………………… 7 2 机械和电气特性……………… … 10 2.1 机械特性…………………………10 2.2 电气特性………………………… 11 2.3 温度传感器的特性……………………… 11 2.4 通信接口特性………………… 12 2.4.1 SPI - 串行外设接口…………………… … 12 2.4.2 I2C - 除 IC 控制接口……………………13 2.5 绝对最大额定值…………………………14 2.6 术语……………………………… … 15 2.6.1 灵敏度………………………………15 2.6.2 零利率水平………………………………15 2.6.3 自我测试………………………………… 15 2.7 焊接信息…………………………15 3 个主要的数字块…………………………… 16 3.1 框图……………………………… 16 3.2 FIFO 中……………………………………… 16 3.2.1 旁路模式………………………………… 16 3.2.2 FIFO 模式……………………………… … 17 3.2.3 流模式………………………………… 17 3.2.4 旁路流模式…………………………… 18 3.2.5 流 FIFO 模式………………………… 19 3.2.6 检索数据从 FIFO…………………………19 4 应用提示……………………………… … 20 5 个数字接口……………………………… … 21 5.1 I2C 串行接口……………………………… 21 5.1.1 I2C 操作………………………………… 22 5.2 SPI 总线接口……………………………… … 23 5.2.1 SPI 读取………………………………… 24
4
wjpccp亲译
表格目录
表 1…设备的摘要……………………………………… … 1 表 2…管脚描述…………………………………………… 8 表 3…筛选值…………………………………………… 9 表 4…机械特性@ VDD = 3.0 V,T = 25 ° C,除非另有说明…………… … 10 表 5…电气特性@ VDD = 3.0 V,T = 25 ° C,除非另有说明…………… … 11 表 6…温度…传感器的特性@ VDD = 3.0 V,T = 25 ° C,除非另有说明…………… 11 表 7… SPI 从机时序值……………………………………… … 12 表 8… I2C 从器件的时序值……………………………………… … 13 表 9…绝对最大额定值………………………………… 14 表 10… PLL 的低通滤波器的元件值…………………………… … 20 表 11…串行接口引脚说明………………………………… … 21 表 12… I2C 术语……………………………………… … 21 表 13… SAD +读/写模式……………………………………… 22 表 14…传送时,主是写一个字节到从机……………………… 22 表 15…传送时主机写入多个字节奴隶……………………… 23 表 16…传送时主机接收(阅读)一个字节数据从奴隶…………… 23 表 17…传送时主机接收(阅读)多个字节的数据从奴隶……… 23 表 18…注册地址的地图……………………………………… 27 表 19… WHO_AM_I 登记……………………………………… … 29 表 20… CTRL_REG1 登记……………………………………… 29 表 21… CTRL_REG1 描述………………………………… … 29 表 22… DR 和 BW 的配置设置………………………………… … 29 表 23…电源模式选择配置…………………………… … 30 表 24… CTRL_REG2 登记……………………………………… 30 表 25… CTRL_REG2 描述………………………………… … 30 表 26…高通滤波器模式配置…………………………… … 31 表 27…高通滤波器切断 frecuency 配置[赫兹]……………………… … 31 表 28… CTRL_REG1 登记……………………………………… 31 表 29… CTRL_REG3 描述………………………………… … 31 表 30… CTRL_REG4 登记……………………………………… 32 表 31… CTRL_REG4 描述………………………………… … 32 表 32…自我测试模式配置………………………………… … 32 表 33… CTRL_REG5 登记……………………………………… 32 表 34… CTRL_REG5 描述………………………………… … 32 表 35… Out_Sel 配置设置………………………………… 33 表 36… INT_SEL 配置设置………………………………… … 33 表 37…参考寄存器……………………………………… 34 表 38…参考寄存器的描述………………………………… 34 表 39… OUT_TEMP 登记……………………………………… … 34 表 40… OUT_TEMP 寄存器的描述………………………………… 34 表 41… STATUS_REG 登记……………………………………… … 34 表 42… STATUS_REG 描述………………………………… 34
传感元件制造所使用的 专用微机械加工工艺开发 意法半导体生产的惯性传感器 在硅片上和执行机构…
1
IC 接口是采用 CMOS 制造 允许高集成度的进程
设计一个专用电路修剪
更好地匹配传感元件的特性…
L3G4200D 满刻度的±250 /±500/ ±2000 dps 可胜任用户所选择的带宽速率 v4200D 是在一个塑料的土地网格 阵列(LGA)封装,可以运行在一个 温度范围为-40 ° C 至+85 ° C…
3
wjpccp亲译
7.9 STATUS_REG(27H)…………………………… 34 7.10 OUT_X_L(28H),OUT_X_H(29H)…………………… 35 7.11 OUT_Y_L(2AH),OUT_Y_H(2BH)…………………… 35 7.12 OUT_Z_L(2CH),OUT_Z_H(2DH)…………………… 35 7.13 FIFO_CTRL_REG(2EH)…………………………… 35 7.14 FIFO_SRC_REG(2Fh 的)………………………… 35 7.15 INT1_CFG(30H)………………………………36 7.16 INT1_SRC(31H)………………………………36 7.17 INT1_THS_XH(32H)…………………………37 7.18 INT1_THS_XL(33H)…………………………… 37 7.19 INT1_THS_YH(34H)…………………………37 7.20 INT1_THS_YL(35H)…………………………… 38 7.21 INT1_THS_ZH(36H)…………………………38 7.22 INT1_THS_ZL(37H)…………………………… 38 7.23 INT1_DURATION(38H)………………………… 38 8 包的信息…………………………40 9 修订历史……………………………… … 41