第一章-智能网联汽车技术综述
第一章-智能网联汽车技术综述

智能网联汽车定义
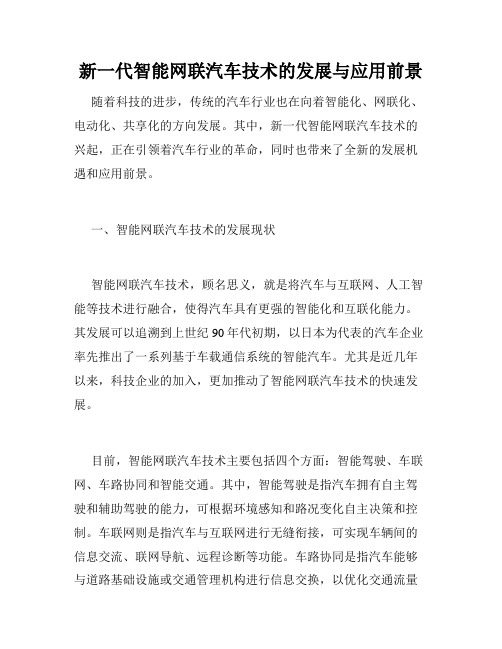
• 我国在智能化的定义中分为哪五个层次?
智能化等级 等级名称
等级定义
人监控驾驶环境
控制
1(DA)
驾驶辅助
通过环境信息对方向和加减速中的一项操作提供支 援,其他驾驶操作都由人操作。
人与系统
2(PA)
部分自动驾 通过环境信息对方向和加减速中的多项操作提供支
驶
援,其他驾驶操作都由人操作
人与系统
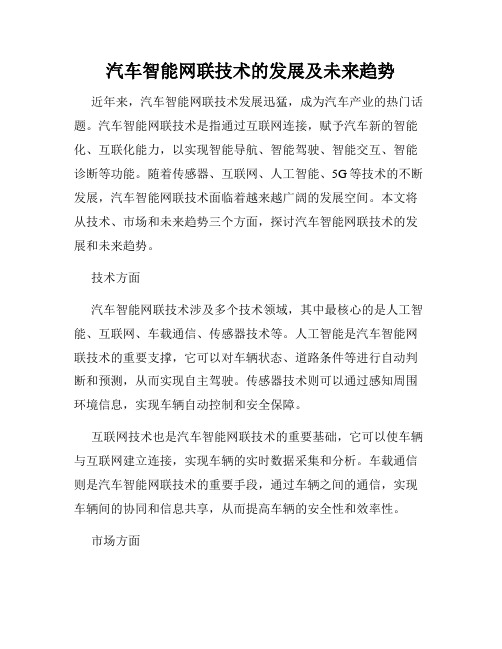
无服用禁止精神药品麻醉品记录 法律、法规规定的其他条件
试验车辆注册登记 强制性项目检查 人机控制模式转换
数据记录 实时回传 特定区域测试 第三方机构检测验证
中国汽车工程研究院推出来的i-VISTA功能场景建设标准
02 •智能网联汽车的发展趋势
国外智能网联汽车的发展现状
• 1.美国自动驾驶技术发展
• 2.德国自动驾驶汽车技术发展现状
• 欧盟于2012年颁布法规,要求所有商用车在2013年11月之前安装AEB紧急自动刹车系统。自2014年起,在 欧盟市场销售的所有新车都必须配备AEB,没有该系统的车辆不符合E-NCAP五星级安全认证。
国外智能网联汽车的发展现状
• 《维也纳道路交通公约》与《道路交通法修订案》
自动驾驶系统(“系统”)监控驾驶环境
监视 人 人
失效应对
典型工况
车道内正常行驶,高速公
人
路无车道干涉路段,泊车
工况。
高速公路及市区无车道干
人
涉路段,换道、环岛绕行、
拥堵跟车等工况。
3(CA)
有条件自动 由无人驾驶系统完成所有驾驶操作,根据系统请求, 驾驶 驾驶员需要提供适当的干预。
系统
4(HA) 5(FA)
智能网联行业背景分析
新一代智能网联汽车技术的发展与应用前景
新一代智能网联汽车技术的发展与应用前景随着科技的进步,传统的汽车行业也在向着智能化、网联化、电动化、共享化的方向发展。
其中,新一代智能网联汽车技术的兴起,正在引领着汽车行业的革命,同时也带来了全新的发展机遇和应用前景。
一、智能网联汽车技术的发展现状智能网联汽车技术,顾名思义,就是将汽车与互联网、人工智能等技术进行融合,使得汽车具有更强的智能化和互联化能力。
其发展可以追溯到上世纪90年代初期,以日本为代表的汽车企业率先推出了一系列基于车载通信系统的智能汽车。
尤其是近几年以来,科技企业的加入,更加推动了智能网联汽车技术的快速发展。
目前,智能网联汽车技术主要包括四个方面:智能驾驶、车联网、车路协同和智能交通。
其中,智能驾驶是指汽车拥有自主驾驶和辅助驾驶的能力,可根据环境感知和路况变化自主决策和控制。
车联网则是指汽车与互联网进行无缝衔接,可实现车辆间的信息交流、联网导航、远程诊断等功能。
车路协同是指汽车能够与道路基础设施或交通管理机构进行信息交换,以优化交通流量和提高道路安全性。
智能交通则是指基于大数据、人工智能等技术,实现对城市交通的智能化管理和优化。
目前,世界各国正在加快推进智能网联汽车技术的研发和应用。
其中,特别是以中国为代表的新兴市场国家,正在成为智能网联汽车技术的重要推动者和参与者。
根据IDC市场调研公司发布的报告显示,未来几年,中国的智能网联汽车市场规模有望成为全球最大的市场之一。
二、智能网联汽车技术的应用前景随着智能网联汽车技术的不断成熟,未来其应用场景也将愈加广泛。
以下从安全性、舒适性、效率性、环保性等方面,对智能网联汽车技术的应用前景进行探讨。
首先,智能网联汽车技术将带来更高的安全性。
自动驾驶技术的应用,能够有效杜绝人为操作失误导致的交通事故。
而车辆间的通信和车路协同等技术,则可以实现车辆实时互相通报信息,以消除交通隐患。
此外,大数据分析和人工智能等技术的运用,还可以实现针对道路状况和交通流量的智能化调控,以提高交通安全性和行车舒适度。
汽车智能网联技术的发展及未来趋势
汽车智能网联技术的发展及未来趋势近年来,汽车智能网联技术发展迅猛,成为汽车产业的热门话题。
汽车智能网联技术是指通过互联网连接,赋予汽车新的智能化、互联化能力,以实现智能导航、智能驾驶、智能交互、智能诊断等功能。
随着传感器、互联网、人工智能、5G等技术的不断发展,汽车智能网联技术面临着越来越广阔的发展空间。
本文将从技术、市场和未来趋势三个方面,探讨汽车智能网联技术的发展和未来趋势。
技术方面汽车智能网联技术涉及多个技术领域,其中最核心的是人工智能、互联网、车载通信、传感器技术等。
人工智能是汽车智能网联技术的重要支撑,它可以对车辆状态、道路条件等进行自动判断和预测,从而实现自主驾驶。
传感器技术则可以通过感知周围环境信息,实现车辆自动控制和安全保障。
互联网技术也是汽车智能网联技术的重要基础,它可以使车辆与互联网建立连接,实现车辆的实时数据采集和分析。
车载通信则是汽车智能网联技术的重要手段,通过车辆之间的通信,实现车辆间的协同和信息共享,从而提高车辆的安全性和效率性。
市场方面汽车智能网联技术的应用场景非常广泛,涉及到交通安全、道路管理、物流配送、汽车售后等多个领域。
随着智能交通、共享汽车等概念的兴起,汽车智能网联技术的市场需求也愈发旺盛。
据国外市场研究机构Frost & Sullivan的报告显示,全球智能交通市场规模在2025年将达到2.5万亿美元,而中国市场将占到其中的三分之一。
预计2020年中国智能汽车销量将超过630万辆,2023年中国智能汽车保有量将超过1500万辆,市场规模超过1万亿元。
未来趋势未来汽车智能网联技术将成为汽车产业的重要趋势,该技术将不断发展和创新,涌现出一批新的应用场景和商业模式。
首先,汽车智能网联技术将为汽车产业注入新的生机和活力。
智能汽车的出现将推动整个汽车产业的转型升级,从传统的“制造业”向“服务业”和“智能制造业”转型,推动新材料新工艺的应用和发展。
其次,汽车智能网联技术将加速智能交通的发展。
第1章智能网联汽车技术概论

三、车载网络与互联技术
在车载网络与互联技术中,囊括了V2X通信技术、云平台与大数据技术。 V2X通信技术实现车间信息共享与协同控制的通信保障机制,涉及移动自组 织网络技术、多模式通信融合技术等。云平台与大数据技术包括智能网联汽 车云平台架构与数据交互标准,云操作系统,数据高效存储和检索技术,大 数据的关联分析和深度挖掘技术。
二、智能网联汽车关键技术发展现状
(二)高精度地图与定位技术 2.定位技术面临的挑战
目前,定位技术面临的两大挑战是覆盖盲区和高昂成本。 随着无人驾驶技术的发展,考虑到高精度地图与定位的广阔发展前景,国 内外越来越多的企业开始进行高精度地图领域的规划与布局。我国主流图商也 都在积极开展面向自动驾驶的高精度地图建设,基于北斗地基增强系统 (Beidou Ground based Augmentation System,BGAS)的高精度定位 技术、多源辅助定位技术等已在我国内地范围内开展应用,将为自动驾驶汽车 提供成本更低、覆盖更广的高精度定位。
普通高等教育车辆工程专业“新工科”建设系列教材
智能网联汽车技术
第一章 第二章 第三章 第四章
智能网联汽车技术概论 智能网联汽车环境感知系统关键技术 智能网联汽车高精度地图与定位技术 智能网联汽车车载网络与互联技术
第五章 第六章 第七章 第八章
智能网联汽车智能制动与能量回收技术 智能网联汽车决策控制技术 智能网联汽车测试与评价技术 汽无人驾驶汽车的应用
决策系统根据全局行车目标、自车状态及环境信息等,决定采用的驾 驶行为以及动作的时机。其中,全局路径规划依赖于高精度地图的目的地间 可选路径的规划过程;局部行为决策依赖于当前行车环境下感知信息和定位 信息,完成巡航、掉头、换道、转弯等决策,输出汽车自动驾驶应具备的速 度、加速度、车轮转向等指标信息。
智能网联汽车技术-课程标准精选全文完整版

可编辑修改精选全文完整版智能网联汽车概论课程标准一、课程性质与任务《智能网联汽车技术概论》是新能源汽车运用与维修专业的一门专业拓展课程,课时为32学时,2学分。
本课程主要包括智能网联汽车产业架构、环境感知技术、高精度地图与定位技术、智能决策技术、控制执行技术、人机交互技术、信息交互技术等。
通过本课程的学习使学生了解智能网联汽车产业发展及产业链的需求、掌握智能网联汽车的三大关键技术感知识别、决策规划与控制执行技术,能够依据智能网联汽车产业、行业、企业的标准及规范完成智能汽车的基础维保及相关售后服务工作。
二、课程教学目标(一)素质目标1.具备坚定的政治信念,要德智体美劳全面发展;2.具备良好的职业道德,能够遵纪守法;3.具备诚实守信、爱岗敬业的品质,具有社会责任心;4.具备质量意识、安全意识、环保意识、信息素养;5.具备开拓进取、敢于创业的精神;6.具备良好的社会适应性,自主学习能力;7.具备团队协作意识,具备严谨务实的工作作风。
(二)知识目标1.熟练掌握智能网联汽车产业发展趋势及新技术的应用前景;2.掌握各种智能网联汽车的专用工具、仪器和设备的操作规范;3.掌握智能网联汽车各环境感知的关键零部件的工作原理;4.掌握智能网联汽车高精度地图与定位系统原理;5.了解智能网联汽车计算平台的功能及内部的算法与算力;6.掌握智能网联汽车控制执行机构的工作原理;7.了解智能网联汽车的人机交互技术发展的趋势;8.熟悉智能网联汽车信息交互技术的规范及要求。
(三)能力目标1.能够依据国家标准及技术规定,完成智能网联汽车的基本维保;2.能够依据关键零部件的安装规范及技术要求,完成智能网联汽车的安装、检测;3.能够完成惯性导航系统的安装、检测与调试;4.能够依据车载网络终端系统的故障,对常见故障进行排除;5.能够依据车际网的协议查找车联网出现的故障,并分析故障原因;6.能够对线控执行关键部件进行安装、检测与基本的调试;7.学生具备发现问题、分析问题、解决问题的能力;8.能够查阅维修资料,自主获得知识的能力。
《智能网联汽车技术概论》课件 - 第三章-雷达在智能网联汽车中的应用

• 军工雷达探测扫描原理
No.10008
超声波雷达原理与应用
• 超声波雷达是汽车最常用的一种传感器, 可以通过接收到反射后的超声波探知周 围的障碍物情况,消除了驾驶员停车泊 车、倒车和起动车辆时前、后、左、右 探视带来的麻烦,帮助驾驶员消除盲点 和视线模糊缺陷,提高了行车安全性。
• 超声波雷达被广泛应用于倒车辅助系统 和自动泊车系统中。
FMCW毫米波雷达系统结构与原理
No.10008
毫米波雷达组成与原理
• 请探讨,并说说FWCW雷达的载波频率与天线调制频率的关系。
No.10008
毫米波雷达组成与原理
• 根据电磁波辐射方式的不同,毫米波雷达主要有两种工作 系统:脉冲系统和连续波系统。请说说车用毫米波雷达技 术原理。
Vbat | CAN
• ③灵敏度。超声波雷达的灵敏度与晶圆 的制造有关,机电耦合系数大,灵敏度 高。
No.10008
0 2 •毫米波雷达
No.10008
毫米波雷达组成与原理
• 1.车载毫米波雷达结构组成
• (1)毫米波雷达的种类有哪些?
• 毫米波雷达是通过发射和接收无线电波来 测量车辆与车辆之间的距离、角度和相对 速度的装置。
• 毫米波雷达可实现自适 应巡航控制、前向防撞 报警、盲点检测、辅助 停车、辅助变道、自主 巡航控制等先进的巡航 控制功能。
No.10008
毫米波雷达在智能网联汽车中的应用
• 在汽车ADAS系统中,毫米波雷达应用于哪些领域?
• 自适应巡航控制(ACC)、前方避碰 报警(FCW)、盲点检测(BSD)、 辅助停车(PA)、辅助变道(LCA) 等领域。
ADAS毫米波雷达工作路径
No.10008
智能车辆系统发展及其关键技术概述

智能车辆系统发展及其关键技术概述1. 背景介绍智能车辆系统是近年来备受关注的热门话题,随着人工智能、大数据和物联网等技术的快速发展,智能车辆系统已经成为汽车行业的一大趋势。
在这个主题中,我们将重点关注智能车辆系统的发展历程和关键技术,涵盖了汽车自动驾驶、智能交通管理、车联网等多个方面。
通过本文的深度分析,希望能够对智能车辆系统有更全面、深入的了解。
2. 智能车辆系统发展历程智能车辆系统的发展可以追溯到20世纪80年代,当时的汽车行业开始逐渐引入电子技术和自动化技术。
随着时间的推移,智能车辆系统逐渐融入了更多的先进技术,包括传感器技术、人工智能、云计算等,从而实现了全方位的智能化。
目前,全球各大汽车厂商和科技公司都在积极研发智能车辆系统,为未来的交通出行做出贡献。
3. 智能车辆系统的关键技术概述3.1 自动驾驶技术自动驾驶技术是智能车辆系统中最为关键的一环,它通过激光雷达、高精度地图、摄像头等传感器设备实现对车辆周围环境的感知,借助人工智能算法实现车辆自主决策和控制。
自动驾驶技术的核心在于实现车辆的智能化和自主化,从而提高交通安全性和行驶效率。
3.2 智能交通管理技术智能交通管理技术以物联网和大数据技术为支撑,通过智能信号灯、智能交通监测系统等设备实现对交通流量和路况的实时监测和调度。
这些技术能够有效提高交通系统的运行效率,缓解交通拥堵问题,为驾驶员和行人提供更安全、便捷的出行环境。
3.3 车联网技术车联网技术是智能车辆系统的重要组成部分,它通过车载通信设备和互联网技术实现车辆之间以及车辆与交通基础设施之间的信息交互和数据共享。
借助车联网技术,车辆可以获取实时的交通信息、气象信息等,从而更好地规划行驶路线,避开拥堵路段,提高行驶安全性和效率。
4. 个人观点和理解智能车辆系统的发展给我们带来了巨大的便利和改变,但同时也面临着很多挑战和问题。
在技术层面上,智能车辆系统还需要不断提升自身的安全性、稳定性和可靠性,确保在各种复杂的道路环境下都能够正常运行。
《智能网联汽车技术概论》课件 - 第七章-智能网联汽车通信技术

V2X综述
• 4.V2R
• V2R是Vehicle to Road的英文缩写, 即车辆自身与道路之间的信息交换。 按照道路的特殊性而言,V2R又可 分为两大类型,一类是车辆自身与 城市道路之间的信息交换,另一类 是车辆自身与高速道路之间的信息 交换车辆自身与道路之间的信息交 换内容,主要包括以下几点:
No.10008
学习目录
1
熟悉智能网联汽车的V2X含义和 功能
2
熟悉智能网联汽车V2X的实现方 式
3 了解移动网络通信技术的发展
4
熟 悉 5G 网 络 的 关 键 技 术 及 其 在 V2X中的应用
5
熟悉几种常见的物联网无线通信 技术及其在V2X中的应用
No.10008
0 1 •V2X
学习目录
• ②当前本体车辆的行驶方向与附近 范围内车辆的行驶方向进行信息内 容的交换;
• ③当前本体车辆紧急状况与附近范 围内车辆的行驶状况进行信息内容 的交换。
V2X综述
• 2.V2I
• V2I是Vehicle to Infrastructure的英文 缩写,即车辆自身与基础设施之间的信 息交换。
• 基础设施主要包括红绿灯、公交站台、 交通指示牌、立交桥、隧道、停车场等。 车辆自身与基础设施之间的信息交换内 容,主要包括以下几点:
No.10008
移动网络通信技术的发展
• 5G的网络架构包含有独立的独立组网 模式SA和与4G网络相结合的非独立组 网模式NSA两种:
• 5G网络标准分为独立组网模式(SA) 和非独立组网模式(NSA)两大类。
• 独立组网模式是指需要全新打造5G网 络环境,如5G基站、5G核心网等。
• 非独立组网模式是指在现有的4G硬件 设施基础上,实施5G网络的部署工作。
智能汽车关键技术及发展概况综述
智能汽车关键技术及发展概况1、前言:智能车辆(I n t e l z i g e n t V e h i c l e s , IV)是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。作为智能交通系统(ITS : Intelligent Tr nasportation System )的一个重要组成部分,智能车辆系统利用传感器技术、信号处理技术、通讯技术、计算机技术等, 辨识车辆所处的环境和状态, 并根据各传感器所得到的信息做出分析和判断, 或者给司机发出劝告和报警信息, 提醒司机注意躲避危险; 或者在紧急情况下, 帮助司机操作车辆(即辅助驾驶系统) ,防止事故的发生, 使车辆进入一个安全的状态; 或者代替司机的操作, 实现车辆运行的自动化。智能车辆系统的引入, 可以提高交通的安全性和道路的利率。目前, 在汽车、卡车、公交系统、工业及军用等领域, 智能车辆系统都得到了应用, 而且应用的多样性和领域还在不断增加。可以预言, 随着信息采集技术、信息处理技术、系统工程技术等相关技术的研究和发展深入, 智能车辆系统将是智能交通系统研究和发展的重要领域。2、智能汽车关键技术及研究智能汽车是一个汇集了众多高新科技的综合系统, 尤其是作为智能汽车关键环节的环境信息获取与智能决策控制, 更是依赖于高新技术的有力支撑, 如传感器技术、图像识别技术、电子与计算机技术、控制技术。智能驾驶系统结构如图1:2.1 感知技术人类在驾驶汽车时所接受的信息几乎全部来自于视觉, 交通信号、交通标志、交通图案、道路标志等均可以看作是环境对驾驶员的视觉通讯语言。同时, 人类在驾驶汽车时,通过对周围路面场景的观测来决定采取什么样的操作。因此, 选择机器视觉作为感知路面场景的传感器是一种很自然的选择。机器视觉在智能车辆中的应用如图2 所示。图1 智能驾驶系统结构框图图2 机器视觉传感器在智能汽车上的应用视觉系统在智能车辆中主要用来识别车辆周围的交通环境, 如确定车辆在车道中的位置和方位、车道的几何结构、检测车辆周围的障碍物如车辆和行人、识别交通标志和交通信号等。当机器视觉用于智能车辆时必须具备实时性、鲁棒性和实用性三方面的技术特点。实时性是指视觉处理系统的数据处理必须与车辆的高速行驶同步进行; 鲁棒性是指智能车辆对不同的道路环境如高速公路、市区标准公路、普通公路等, 不同的路面环境如路面及车道标线的宽度、颜色、纹理、动态随机障碍与车流等,以及变化的气候条件如日照及景物阴影、黄昏与夜晚、阴天与雨雪等均具有良好的适应性; 实用性是指智能车辆在体积和成本等方面能够为普通汽车用户所接受。智能车辆系统可靠运行的前提是通过各种传感器准确的捕捉环境和车辆自身的状态信息, 并加工处理, 随后发出预警或者自动操控车辆。研究如何将传感器传来的信息加以有效处理、分析, 并准确的确定环境和车辆自身的状态是非常重要的。然而到目前为止, 没有任何一种传感器能保证在任何情况下提供完全可靠的信息, 采用多传感器融合技术, 即将多个传感器采集的信息进行合成, 形成对环境特征的综合描述的方法, 能够充分利用多传感器数据间的冗余和互补特性, 获得我们需要的、充分的信息。目前, 在智能车辆领域, 除了视觉传感器外, 常用的还有激光雷达、毫米波雷达、声纳、红外探测、磁导引、GPS等传感器。2.2 决策技术在辅助驾驶或者自动驾驶技术中, 需要依据感知系统获取的信息来进行决策判断, 进而向驾驶员发出警告或者对车辆进行控制。例如, 在车道偏离警告系统和碰撞警告系统中, 需要预测主车辆和其它车辆未来一定时间内的状态。先进决策技术包括模糊推理、强化学习、神经网络和贝叶斯网络等技术。2.3控制技术对自动驾驶车辆或者辅助驾驶车辆来说, 利用环境感知信息进行规划决策后需要对车辆进行控制, 比如对路径的自动跟踪, 此时性能优良的控制器成为了智能车辆必不可少的部分, 成为智能车辆的关键。智能控制代表着自动控制的最新发展阶段, 是应用计算机模拟人类智能, 实现人类脑力和体力劳动自动化的一个重要领域。智能控制是一个新兴学科, 包括递阶控制系统、专家控制系统、模糊控制系统、神经控制系统和学习控制系统等5个方面。2.4 车辆定位与路径规划车辆定位导航系统应用车辆自动定位技术、数字地图、通信技术, 为车辆提供路径引导、无线遥控等功能。在车辆定位导航系统中, 定位是实现导航功能的前提和基础, 车辆定位技术大致上可分为三类: 惯性导航、无线电定位和卫星定位。车辆定位导航系统如图3所示:路径规划是智能车辆信息感知和车辆控制的桥梁, 是智能车辆自主驾驶的基础,可分为全局路径规划和局部路径规划。全局路径规划是在己知地图的情况下, 利用已知局部信息如障碍物位置和道路边界,确定可行和最优的路径, 它把优化和反馈机制很好的结合起来。局部路径规划是在全局路径规划生成的可行驶区域指导下,依据传感器感知到的局部环境信息来决策车辆当前前方路段所要行驶的轨迹。与移动机器人路径规划相比, 车辆的行驶环境具有非结构化、动态性、不确定性等特点,因此研究者们在借用移动机器人路径规划成果的同时, 也在深入彻底研究智能车辆路径规划问题。图3 车辆定位导航系统示意图2.5 其它智能车辆的关键技术还包括车辆状态随机估计和智能车辆体系结构的研究等方面。为了对车辆进行有效的控制, 必须全面准确地获取车辆的自身状态参数, 如车辆横摆角速度估计、汽车轮胎与路面之间的摩擦系数估计、以及车辆侧面碰撞模型的非线性动力学参数的辨识等。由于智能车辆系统复杂程度高、综合性强, 一般需要一组研究人员共同研究开发, 同时为了使系统能够在有限的时间和计算资源内完成各功能, 计算经常需要一定的并行性, 由此产生这样的问题一一将计算资源有效地分布在一组处理器上需要什么样的体系结构, 这就是智能车辆控制器体系机构所研究的问题。3、支撑智能汽车发展的新理论和新技术3.1 不确定性人工智能理论人工智能在模拟人类的确定性智能逻辑思维方面,已经取得很大成就,但是在人类不确定性智能的模拟方面始终没有太大的进展,而在模拟人类形象思维方面尚处在探讨阶段。因此,不确定性人工智能[70]是人工智能中的研究热点,也是人工智能中的重大前沿课题。不确定性人工智能是使机器能够具备人脑一样的不确定性信息和知识的表示能力、处理能力和思维能力,是进入21世纪后新发展出来的多学科交叉渗透的新学科,它已成为当代科学技术研究的热点领域。人类所处的这个客观世界充满了不确定性,人类自身在认知过程中也具有不确定性。因为人类的认知实际上是对客观世界的主观反应,客观世界的不确定性,决定了人类主观认知过程的不确定性。比如,视觉感知会存在不确定性甚至出现错觉,记忆也会随着时间的推移而愈加模糊,而联想、创造和顿悟等形象思维更是毫无确定性可言。不确定性人工智能理论对智能汽车技术研究的一个重要指导内容就是分析不同驾驶人员对同一外界环境刺激所产生的不确定性认识以及采取的不确定性处理方式。举个形象的例子,不确定性认识是指面对路面上的同一滩积水,有的驾驶人员会认为是一个小路障,而有的驾驶人员则会觉得无关紧要。不确定性处理方式则是指同样是面对这滩积水,有的驾驶人员会选择绕过去,而有的却会选择减速直接通过。不确定性人工智能理论可以进一步细分为若干小方面,包括粗糙集和模糊集、云模型和粒计算理论等。3.1.1 粗糙集和模糊集理论粗糙集和模糊集理论主要研究各种不确定性理论的本质联系。人类行为的不确定性研究在智能汽车上具有重要的应用。比如,在日常驾驶中,对于一个寻找泊车位的问题,驾驶员仅靠自己的观察判断难以直接获得最满意的答案。如何在一系列不确定的潜在泊车位中寻找一个合适的泊车位,这是不确定性概念的精确处理研究实例之一。3.1.2 云模型理论云模型(Cloud Model)是一种定性和定量的转换模型。云模型理论可以用于人类定性思维(概念内涵)与定量思维(概念外延)之间的双向变换研究。比如,驾驶过弯的问题就是智能汽车研究中的一个定性与定量计算的转换例子。对于驾车中的过弯操作,驾驶员只能靠目测、经验等做出定性判断;驾驶员做出大致入弯角度的定性判断后,智能系统如何定量计算并给出实际入弯角度,才是解决问题的关键。3.1.3 粒计算理论粒计算主要研究信息粒的解析表示形式化理论(包括信息粒的结构以及信息粒之间关系的形式化描述)、信息粒的粒度度量理论和方法(粒度的度量,包括信息粒的大小以及信息粒所表示的知识的粒度大小)、信息粒的自动分解与合成方法、不同知识粒度下的不确定性变化规律。对人类多粒度、跨粒度思维的研究可以在驾驶行为过程中有所应用。如图4所示,在实际驾驶中,驾驶人员需要同时观察和判断不同尺度(即不同粒度空间)的环境信息,包括近距离的细粒度信息(车载仪表)、中距离的中粒度信息(周边的车辆)以及远距离的粗粒度信息(道路延伸方向)。图4 不同粒度空间的环境信息3.2 认知计算认知计算在20世纪90年代成为发展热点,目前已成为计算智能领域中一个重要的研究方向。2009年国家自然科学基金委发布了“基于视听觉信息的认知计算”的重大研究计划,该研究计划的制定和实施表明对认知计算的研究在我国逐步走向广泛和深入。在该研究计划中提出的“多模态感知信息协同认知机理”可以说是与智能汽车技术的发展紧密相关。比如,驾驶人员融合视听觉采集到的环境信息然后做出驾驶反应的这个过程就是一个刺激-反应模型。因此,三维立体视觉处理模型、情感计算等方面的研究工作可以看作是认知计算在智能汽车技术上的初步应用。3.2.1 三维立体视觉处理模型三维立体视觉处理模型从人类视觉认知原理出发,用机器学习方法学习人脸结构先验知识,提出了基于单张二维图片的两步人脸三维立体认知方法,初步实现以单张照片上少量特征点为基础的三维人脸建模。由此模型发展而来的三维人脸识别系统可以用于记录和辨认驾驶人员信息,达到跟踪和防盗的目的。3.2.2 情感计算情感计算基于认知科学和心理学,发现了嘴部特征是人脸表情识别中最重要的特征,为人脸表情的表达机制以及计算机人脸表情的自动识别等研究奠定了基础。情感计算技术可以监控驾驶员的生理和心理状态,为防止酒后驾驶和疲劳驾驶提供了技术支持。3.3 面向智能汽车的数据处理技术智能汽车的行驶离不开收集和发送各种数据,而支撑其正常运转的核心技术就是面向智能汽车的数据处理技术。智能汽车数据的特点就是数据量大、数据种类多而且有海量的冗余数据。针对这些特点,面向交通的数据处理技术包括数据融合、数据压缩、数据标准化、数据挖掘和数据仓库等技术。智能汽车可能同时拥有多种传感器数据及多种通信方式,所以需要数据融合技术来实现对这些不同来源的数据的分析与综合。又因为智能汽车需要收发的数据量是非常巨大的,故而需要数据压缩技术来提高数据处理的效率。智能汽车需要和其他车辆以及车联网发生交互,数据标准化技术可以保证数据在各种不同的载体之间通用。针对智能汽车的海量数据,数据挖掘可以通过数理统计、机器学习等方法从海量数据中获取有效数据。智能汽车是一个决策系统,需要一个有主题的、集成的、稳定的数据集合,而数据仓库技术就可以提供这样一个结构化的数据环境。3.4 电动汽车的智能化能源管理系统能源系统是电动汽车的核心技术之一,它好比传统汽车的发动机,是电动汽车的“心脏”,直接关系到电动汽车的质量水平与安全性,能源管理系统是这一核心技术的重要组成部分。电动汽车能源管理系统的功用是在满足汽车基本技术性能(如动力性、驾驶平稳性等)和成本等要求的前提下,根据各部件的特性及汽车的运行工况,实现能量在能源转换装置(如发动机、电动机、储能装置、功率变换模块、动力传递装置、发电机和燃料电池等)之间按最佳路线流动,使整车的能源利用效率达到最高。如图5所示,UMD_IPC(University of Michigan-Dearbornintelligent power controller)就是一个利用机器学技术而研制的智能化能源管理系统。它是通过神经网络来预测路况并实时做出控制的智能化能源管理系统。图5 智能化的能源管理系统4、国内外智能汽车技术的发展概况近10年来,美国、欧洲和日本等发达国家,围绕发展新型智能汽车技术、综合治理城市交通和环境能源等问题制定了一系列的研究项目和计划。表1列出了由日本国土建设及交通部设立的一些重要的智能汽车研究项目。AHS的主要目标是减少交通事故,改善交通效率,以及减轻驾驶人员的操作负担。该研究致力于信息提供、车辆控制辅助和全自动驾驶技术的开发,以实现障碍识别和规避、速度控制和人机交互界面等应用。ASV的主要目标是用最先进的技术来最大可能地提升车辆的安全性。该研究还将进一步扩展,其涉及货车、公共汽车以及摩托车。表1 日本的智能汽车研究项目研究项目备注AHS Advanced Cruise-Assistance Highway SystemsASV Advanced Safety Vehicle表2列出了由美国交通部发起的两个主要智能汽车研究项目。VSC定义了一套维护车辆安全的通信规范,并评估专用短程无线通信(DSRC:Dedicated-Short Range Communications)标准,以及采用5.9GHz带宽的DSRC 无线技术来支持该通信规范。VII是致力于开发无线通信和网络技术的新方法,它将允许驾驶人员和乘客能够了解当前交通状况和道路信息,接收可能的风险警告,并引导车辆行进中的无线通信。表2 美国的智能汽车研究项目研究项目备注VSC Vehicle Safety CommunicationVII Vehicle Infrastructure Integration表3列出了欧洲资助的一些重要的智能汽车研究项目。这些项目覆盖了很广的范围,包括人-车操控界面、紧急救援、道路安全预防、车载传感器、行人别、十字路口安全、协作系统和协作网络、地理学技术以及车-车通信等。表3 欧洲的智能汽车研究项目研究项目备注AIDE Adaptive Integrated Driver-vehicle InterfaceAIDER Accident Information and Driver Emergency RescueATLANTIC A Thematic Long-term Approach to Networking forthe Telematics &ITS CommunityPreventive and Active Safety Applications Contributeto the Road Safety Goals on PREVENTEuropean RoadsADOSE Reliable Application Specific Detection of Road Users with Vehicle On-board Sensors INTERSAFE-2 Cooperative Intersection SafetySAFERIDER Advanced Telematics for Enhancing the Safety andComfort of Motorcycle Riders COOPERS Cooperative Networks for Intelligent Road SafetyBreakthrough Intelligent Maps and Geographic Tools for the context-aware-delivery of HIGHW AYE-safety and added value servicesI-WAY Intelligent Cooperative Systems in Car for Road SafetyCOMeSafety COMeSafety[25]COMeSafety Advanced driver support system based on V2Vcommunication technologies SafeSpot Cooperative vehicles and road infrastructure for road safetyCVIS Cooperative Vehicle-Infrastructure Systems与国外相比,国内在智能汽车方面的研究起步较晚,规模较小,和国际先进水平相比差距较大,竞争力明显不足。造成上述状况的原因,主要是汽车工业的科技含量较高,跨国汽车公司实力强大,而国内电子行业缺乏人才和技术储备,影响了国内汽车智能化的进程,暂时还处于跟着跑的境地。虽然形势不容乐观,但我国也正在兴起汽车和交通系统信息化、智能化的热潮,国家交通部规划司于2007年制定了《公路水路交通信息化“十一五”发展规划》,其为我国智能汽车技术的研究奠定了良好的发展基础。5、总结汽车已经过了100多年的发展历史,从诞生的那一天起,它就从未停止过智能化发展的步伐。当前的信息技术革命正在推动汽车设计翻开新的一页,自动化、智能化、多功能将成为21世纪汽车发展的新趋势。随着以计算机技术和信息技术为代表的高新技术的发展, 不断改变着人们的行为和思维模式, 人工神经网络、模糊控制、神经模糊技术和虚拟现实技术等新思想、新技术纷呈叠出, 为我们站在一个新的高度研究智能车辆提供了可能。这是一个能够将汽车产业、交通系统与信息产业紧密结合起来的新型领域。智能车辆的研发为世界各国的高新技术产业提供了又一广阔的发展空间。欧洲、日本、美国等发达国家虽然走在了前面, 但只要我们把握住这一机遇, 有计划、有步骤地制定相应的发展策略, 提供各种优惠政策来积极指引和引导其健康发展, 从而在改善和发展我国交通, 提高交通安全性的同时, 缩小该领域与发达国家之间的差距。6、参考文献:[1]Deng We iwen.Eleetrifieation and Intelligenee 一Teehnologies that Drive Future Ve hicles [ J ].J ournal of Automotive Safety and Energy , 2010,V o l.1 No.3 : 179 ~189.[2]陈超, 吕植勇, 付姗姗, 彭琪. 国内外车路协同系统发展现状综述[ J]. 交通信息与安全,2011 ,2 9 (1) : 102 ~109.[3]胡国强, 陈昌生, 熊明洁. 世界智能车辆的关键共性技术研究现状[J].轻型汽车技术, 2011 ,3 : 3 ~6.[4]翼杰. 智能汽车关键技术发展及研究现状[J]. 西南汽车信息,2012年上半年合刊, 2012(06).[5]王国胤, 陈乔松, 王进. 智能车技术探讨[J]. 重庆邮电大学计算机科学与技术研究所,2012(05):2~6.[6]李舜酩,沈峘,毛建国,辛江慧,缪小东.智能车辆发展及其关键技术研究现状[J].传感器与微系统,2009(01):2~3.[7]Martinez F J,Toh C-K,Cano J C,et al.Emergency Services in Future Intelligent Transportation Systems Based on Vehicular Communication Networks[J].IEEE Intelligent Transportation Systems Magazine,2010,2(2):6~20 [8]An Sheng-hai,Lee B-H,Shin D-R.A survey of intelligent transportation system [C]∥2011Third International Conference on Computational Intelligence,Communication System and Networks(CICSyN).2011:332~337[9] Park J,Chen Zhi-hang,Kiliaris L,et al.Intelligent vehicle power control based on machine learning of optimal control parameters and prediction of road type and traffic congestion [J].IEEE Transitions on Vehicular Technology,2009,58(9):4741~475.[10]蒋媛媛,张志霞.智能汽车的系统技术核心[J].智能化,2012(5).[11]何树林. 浅谈智能汽车及其相关问题[J]. 汽车工业研究,2010(09):1~3.[12]孙胤胤. 大型智能汽车系统开发技术研究[J]. 江苏科技信息,2013(10).[13]韩晓峰,林晓丽.智能汽车系统的技术研发要点及趋势[J]. 智能设备,2013(7).[14]蒋媛媛,张志霞.智能汽车的系统技术核心[J].智能化,2012(5).[15]王建,张晓炜, 杨锦,昝鑫,刘小勇.基于视觉传感器的智能车控制算法设计[J].微型机及应用,2010(10).[16]李骏. 智能汽车发展需不断创新[J]. 中国信息化周报,2014(06).[17]江屹,智能汽车3.0:进化而非革命.中国西部,2014(5).。
《智能网联汽车技术概论》课件 - 第二章-视觉传感器在智能网联汽车中的应用

• 场景流是空间中场景运动形成的三维运 动场。
No.10008
• 立体视觉一般有哪三类实现方式?请详细说明?
No.10008
• 4.视觉里程计算法
• 视觉里程计算法的一个非常重要的特点是它只关心局部运动,而且大部分时间 是指两个时刻之间的运动。当以一定的时间间隔采样时,可以估计运动物体在 每个时间间隔内的运动。由于该估计值受噪声的影响,故将前一时刻的估计误 差加入后一时刻的运动,会产生误差累计。
视觉传感器的基本认识
• 1.车载摄像头的功能
• 请说说智能网联汽车上的摄像头各有什 么功能?
• 单目传感器的工作原理是先识别后测距, 首先通过图像匹配对图像进行识别,然 后根据图像的大小和高度进一步估计障 碍物和车辆移动时间。
• 双目视觉传感器的工作原理是先对物体 与本车辆距离进行测量,然后再对物体 进行识别。
No.10008
双目视觉传感器的原理和特点
• 请说说双目视觉系统在应用上有哪些不 足?
• 争对双目视觉系统的不足,通常采用哪 些技术来补充?
No.10008
红外夜视视觉传感器的原理和特点
• 请说说电磁波的特征有哪些?
• 基于红外热成像原理,通过能够透过红外辐射的红外光学系统,将视场内景物 的红外辐射聚焦到红外探测器上,红外探测器再将强弱不等的辐射信号转换成 相应的电信号,然后经过放大和视频处理,形成可供人眼观察的视频图像。
• 智能网联汽车中使用的图像处理方法算 法主要来源于计算机视觉中的图像处理 技术。
计算机 视觉识 别流程
图像 输入
预处 理
特征 提取
特征 分类
匹配
完全 识别
智能网联新能源汽车中的人工智能技术应用综述

智能网联新能源汽车中的人工智能技术应用综述摘要:而智能网联新能源汽车,不是简单的将新能源汽车、智能网联汽车进行物理的重组,而是下一代新型汽车的重新定义,对系统设计、制造工艺、生产、测试、基础设施配套、软硬件升级等都有全新的要求,而其智能化是其必须具备的关键特征之一。
基于此,本篇文章对智能网联新能源汽车中的人工智能技术应用综述进行研究,以供参考。
关键词:智能网联;新能源;汽车;智能化;人工智能;产业引言互联汽车产业已经成为一个新兴产业,智能互联汽车逐渐走进人们的日常生活。
智能汽车与许多技术密切相关,人工智能技术是其中最主要的,本文介绍了人工智能技术在智能汽车中的研究背景和研究意义,介绍了人工智能汽车技术的主要方向,未来人工智能技术在智能汽车中的应用前景,对相关研究有一定的指导意义。
1智能网联汽车相关技术简介1.1 基于视觉的感知识别图像或视频中的物体并确定其位置和大小的任务是机器视觉领域的核心问题之一,已经存在了近二十年。
作为计算机视觉的基本问题,物体识别是许多计算机视觉任务的基础,物体识别算法广泛应用于许多实际应用中,如智能驾驶、机器人视觉、视频监控等。
自2012年以来,由于大数据技术和硬件计算性能的提高,卷积神经网络再次引起研究人员的关注,与传统的手动特征相比,分配的CNN具有更强大,更深的特征,这也促使研究人员将CNN应用于物体识别领域。
使用深度学习的对象识别算法可以分为两组:两级和单级。
两步方法使用从厚到薄的检测策略,而单步方法使用神经网络模型来执行单步检测任务。
1.2 智能教师系统智能辅导系统应用于汽车专业培训,是由人工智能技术形成的智能信息和教育资源。
通过域模型,导师模型和学习模型构建计算机学习平台。
在区域模式下,完成了汽车专业人员的各种基础的构建,使用层次结构,语义网络和其他规则来改变汽车专业教材的纸质版本的内容。
1.3 传感器技术传感器技术是智能网络技术的基础。
传感器是由人类使用计算机和通信技术开发的集成技术,用于自动检测环境和温度等自然元素。
车联网与智能交通系统技术综述

车联网与智能交通系统技术综述近年来,随着科技的不断进步,车联网和智能交通系统逐渐成为热门话题。
车联网是一种基于互联网的智能交通系统,可以实现车辆之间、车辆和路网之间以及车辆和人之间的高效互动。
而智能交通系统则是一种基于大数据和物联网技术的现代典型交通管理和控制系统,旨在提供更加安全、便捷、高效的出行方式。
本文将探讨车联网和智能交通系统的相关技术及其发展前景。
一、车联网技术车联网技术主要包括车辆通信、定位、感知和控制四个方面。
其中,车辆通信是车联网的关键技术之一,是实现车辆之间互联互通的基础。
通信技术方面,车联网主要采用基于车辆自组网(VANET)的通信技术,将车辆直接连接成一个网络,形成一种点对点的通信方式。
基于车辆自组网的通信技术具有低成本、高效率、低时延和高可靠性等特点,是车联网的重要发展方向。
在定位技术方面,目前车联网主要采用全球定位系统(GPS)和卫星地图技术,通过GPS模块和软件将车辆的位置信息传输到云端,以实现远程监控和管理。
在感知技术方面,车联网利用车载传感器和视频设备等技术,对车辆周围环境进行实时监测和控制。
在控制技术方面,车联网通过车辆控制单元和智能软件系统等技术,对车辆实现远程控制和管理,并为驾驶员提供智能化的驾驶辅助服务。
二、智能交通系统技术智能交通系统技术主要包括道路信息采集、交通流量分析、智能路网控制、交通决策支持和人机交互等方面。
其中,道路信息采集主要采用车牌识别、雷达传感器、视频监控、GPS和车辆控制终端等技术,以实现对道路交通数据的实时采集和处理。
交通流量分析主要采用数据挖掘和机器学习等技术,对采集到的大量数据进行处理和分析,并预测未来交通流量的变化趋势。
在智能路网控制方面,智能交通系统通过交通信号灯、电子警察、车道指示器、路况提示器等技术,对交通系统进行实时控制和调度,并有效优化道路交通流量。
在交通决策支持方面,智能交通系统通过建立交通模型和模拟系统,为政府机构和交通管理部门提供决策支持和预测分析服务。
汽车行业智能网联汽车技术解决方案

汽车行业智能网联汽车技术解决方案第一章智能网联汽车概述 (2)1.1 智能网联汽车的定义 (2)1.2 智能网联汽车的发展历程 (3)1.2.1 国际发展历程 (3)1.2.2 国内发展历程 (3)1.3 智能网联汽车的关键技术 (3)1.3.1 传感器技术 (3)1.3.2 控制器技术 (3)1.3.3 网络通信技术 (3)1.3.4 软件技术 (3)1.3.5 数据处理与分析技术 (3)第二章车载通信系统 (4)2.1 车载通信系统的组成 (4)2.2 车载通信协议与技术 (4)2.2.1 车载通信协议 (4)2.2.2 车载通信技术 (4)2.3 车载通信系统的安全与隐私 (5)2.3.1 安全问题 (5)2.3.2 隐私问题 (5)第三章感知与定位技术 (5)3.1 感知技术概述 (5)3.2 雷达与摄像头融合 (6)3.2.1 雷达技术 (6)3.2.2 摄像头技术 (6)3.2.3 雷达与摄像头融合 (6)3.3 高精度定位技术 (6)3.3.1 全球定位系统(GPS) (6)3.3.2 地面增强系统(GBAS) (6)3.3.3 惯性导航系统(INS) (6)3.3.4 多传感器融合定位 (7)3.4 感知与定位技术的集成 (7)3.4.1 传感器融合 (7)3.4.2 数据处理与分析 (7)3.4.3 控制策略与执行 (7)第四章智能决策与控制 (7)4.1 智能决策系统的组成 (7)4.2 驾驶辅助系统的设计 (8)4.3 自动驾驶系统的实现 (8)4.4 智能控制技术在汽车中的应用 (8)第五章车载计算平台 (9)5.1 车载计算平台的架构 (9)5.2 车载计算平台的功能优化 (9)5.3 车载计算平台的安全与可靠性 (9)第六章数据处理与分析 (10)6.1 数据处理技术概述 (10)6.2 数据挖掘与机器学习在智能网联汽车中的应用 (10)6.3 大数据分析在智能网联汽车中的应用 (11)第七章车联网技术 (11)7.1 车联网的架构与组成 (11)7.2 车联网的关键技术 (12)7.3 车联网的安全与隐私保护 (12)第八章智能网联汽车的安全 (13)8.1 智能网联汽车安全概述 (13)8.2 车载网络安全 (13)8.3 车载软件安全 (13)8.4 智能网联汽车的安全测试与评估 (14)第九章智能网联汽车的政策法规与标准 (14)9.1 智能网联汽车的政策法规 (14)9.1.1 国家层面政策法规概述 (14)9.1.2 地方层面政策法规现状 (14)9.1.3 政策法规的促进作用 (14)9.2 智能网联汽车的标准体系 (15)9.2.1 标准体系构建 (15)9.2.2 标准制定与修订 (15)9.2.3 标准体系的作用 (15)9.3 智能网联汽车的认证与监管 (15)9.3.1 认证制度 (15)9.3.2 监管体系 (15)9.3.3 监管体系的完善 (15)第十章智能网联汽车的未来发展趋势 (16)10.1 智能网联汽车的技术发展趋势 (16)10.2 智能网联汽车的商业化进程 (16)10.3 智能网联汽车的社会影响与挑战 (16)第一章智能网联汽车概述1.1 智能网联汽车的定义智能网联汽车(Intelligent Connected Vehicle,ICV)是指通过先进的传感器、控制器、执行器以及网络通信技术,实现车辆与车辆、车辆与基础设施、车辆与行人以及车辆与网络等的信息交换和共享,从而提高汽车的安全、环保、节能和舒适性的一种新型汽车。
(完整版)第一章-智能网联汽车技术综述

智能网联行业背景分析
高度自动驾 驶
由无人驾驶系统完成所有驾驶操作,特定环境下系 统会向驾驶员提出响应请求,驾驶员可以对系统请 求不进行响应。
完全自动驾 无人驾驶系统可以完成驾驶员能够完成的所有道路
驶
环境下的驾驶操作。
系统 系统
系统 系统 系统
人
高速公路正常行驶工况, 市区无车道干涉路段。
系统 系统
高速公路全部工况及市区 有车道干涉路段。
行融合,对道路、车辆、行人、交通标志和交通信号 等进行识别,决策分析和判断车辆驾驶模式和将要执 行的操作,并向控制和执行层输送指令。
智能网联汽车的组成
• 3.控制和执行层 • 控制执行层的主要功能是根据功能决策层的指令对车
辆进行操作和协调,为联网车辆提供道路交通信息、 安全信息、娱乐信息、救援信息、商务办公、在线消 费等,以保护汽车安全、舒适驾驶。比较传统车辆, 智能网联汽车在功能上主要增加了环境感知和定位系 统、无线通信系统、车辆自组织网络系统和先进的驾 驶辅助系统。
智能网联汽车定义
• 我国在智能化的定义中分为哪五个层次?
智能化等级 等级名称
等级定义
人监控驾驶环境
控制
1(DA)
驾驶辅助
通过环境信息对方向和加减速中的一项操作提供支 援,其他驾驶操作都由人操作。
人与系统
2(PA)
部分自动驾 通过环境信息对方向和加减速中的多项操作提供支
驶
援,其他驾驶操作都由人操作
人与系统
传输实时性、可靠 性要求较低。
人与系 统
周边车辆/行人/非 机动车位置、信号 灯相位、道路预警
等信息。
传输实时性、可靠 性要求较高。
人与系 车-车、车-路间的 传输实时性、可靠
《智能网联汽车技术》课程教学大纲
《智能网联汽车技术》课程教学大纲《智能网联汽车技术》是车辆工程的专业学位课程的选修课,本课程是一个集中运用汽车工程、人工智能、微电子、自动控制、通信与平台等技术的多学科交叉融合的新兴课程, 通过学习环境感知、控制执行、信息交互等于一体的高新技术综合体,实现车辆工程专业学生对智能汽车的了解。
通过本课程的理论学习,使学生具备如下知识和能力:1、知识目标1.1掌握智能网联汽车的基本知识:1.2了解智能网联汽车产业发展趋势及新技术的应用前景:1.3掌握各种智能网联汽车的专用工具、仪器和设备的操作规范:1.4掌握智能网联汽车的关键技术及应用;1.5熟悉智能网联汽车信息交互技术的规范及要求;1.6掌握智能网联汽车先进驾驶辅助系统。
2、能力目标通过本课程学习,学生应了解智能网联汽车的产生、现状及发展趋势,掌握智能网联汽车相关的基础知识及关键技术,并且掌握先进技术在汽车上的应用。
能够依据国家标准及技术规定,完成智能网联汽车的基本维保及智能网联汽车的安装、检测;能够依据车载网络终端系统的故障,对常见故障进行排除;能够查阅维修资料,自主获得知识的能力。
二、课程教学的内容及学时分配1、课程理论教学内容及要求《智能网联汽车技术》课程主要以讲授、讨论、案例分析为主,以课堂测验、课内实验为辅。
课堂教学将利用MOOC平分和雨课堂辅助教学,调动学习积极性,提高教学效率。
本课程目标、知识单元与学时分配见表1。
2、课程实验教学内容及要求智能网联汽车技术课程实验注重基础知识、基本技能的培养,着重于实验操作和实践技能的训练,以达到用所学智能理论知识解决实际问题的能力,使学生初步具备使用各种智能汽车的专用工具、仪器、设备的操作规范,熟悉人机交互技术、自动寻迹技术、ADAS整车在环虚拟仿真测试等。
通过实验,使学生具备如下知识和能力:1)培养学生在实验中提出问题、分析问题、解决问题的能力:能够依据车载网络终端系统的故障,对常见故障进行排除。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
试验车辆注册登记 强制性项目检查 人机控制模式转换
数据记录 实时回传 特定区域测试 第三方机构检测验证
中国汽车工程研究院推出来的i-VISTA功能场景建设标准
02 •智能网联汽车的发展趋势
国外智能网联汽车的发展现状
• 1.美国自动驾驶技术发展
01 •智能网联汽车的发展背景
智能网联汽车定义
• 请观看视频,并说说未来的出行会是什么样?
智能网联汽车定义
• 请说说:什么是智能网联汽车?
• 根据《国家车联网产业标准体系建设指南》对智能网 联汽车定义:智能网联汽车是指搭载先进的车载传感 器、控制器、执行器等装置,并融合现代通信与网络 技术,实现车与X(人、车、路、云端等)智能信息 交换、共享,具备复杂环境感知、智能决策、协同控 制等功能,可实现“安全、高效、舒适、节能”行驶, 并最终可实现替代人来操作的新一代汽车。
• 在美国、欧洲、日本等发达国家和地区,自动驾驶技 术是未来交通发展的重要方向。在技术研发、道路测 试、标准法规和政策等方面,为智能网联汽车的发展 提供了条件。为了加快自动驾驶商业化的政策支持, 我国在这方面的研究也很活跃,为自动驾驶技术的开 发和测试创造了坚实的基础。
• 问题思考:为什么大家都在发展自动驾驶,与传统的 汽车比较有哪些优势?
• 2.德国自动驾驶汽车技术发展现状
• 欧盟于2012年颁布法规,要求所有商用车在2013年11月之前安装AEB紧急自动刹车系统。自2014年起,在 欧盟市场销售的所有新车都必须配备AEB,没有该系统的车辆不符合E-NCAP五星级安全认证。
国外智能网联汽车的发展现状
• 《维也纳道路交通公约》与《道路交通法修订案》
智能网联汽车定义
• 那么,什么是车联网?
• 车联网产业是依托信息通信技术,通过车内、车与车、 车与路、车与人、车与服务平台的全方位连接和数据 交互,提供综合信息服务,形成汽车、电子、信息通 信、道路交通运输等行业深度融合的新型产业形态。
智能网联汽车定义
• 根据我国《智能网联汽车技术路线图》的解释,智能 网联汽车具有两个层面:一是智能化,二是网联化。 请说说在智能化与网联化层面分别定义了哪些内容?
• 2003年,国防科技大学与一汽合作的红 旗CA7460实现了高速公路自动驾驶示 范,最高时速170Km/小时,可以实现 自动超车。
• 2011年7月,国防科技大学自主研发的 红旗HQ3无人驾驶汽车首次完成了长沙 至武汉286Km的高速全程无人奥林匹克森林公园” 路线上来回行驶,吸引了无数眼球。
智能网联汽车行业背景分析
• 2018年4月,我国工业和信息化部颁发了《智能网联汽车道路测试管理规范》
智能网联汽车道路测试管理规范
测试主体单位性质 业务范围
事故补偿能力 测试评估能力 事件记录分析能力 对法律法规遵守
测试驾驶人签订劳动合同或劳务合同 经过驾驶培训
无重大交通违章违法记录 驾龄3年以上,自动驾驶50小时以上 最近连续3个记分周期内无记满12分
• 在智能化层面,汽车配备了多种传感器(摄像头、超声波雷达、 毫米波雷达、激光雷达),实现对周围环境的自主感知,通过 一系列传感器信息识别和决策操作,汽车按照预定控制算法的 速度与预设定交通路线规划的寻径轨迹行驶。
• 在网联化层面,车辆采用新一代移动通信技术(LTE-V、5G 等),实现车辆位置信息、车速信息、外部信息等车辆信息之 间的交互,并由控制器进行计算,通过决策模块计算后控制车 辆按照预先设定的指令行驶,进一步增强车辆的智能化程度和 自动驾驶能力。
• 请回答:德国再《维也纳道路交通公约》与《道路交 通法修订案》中做了哪些重要的修订?
国外智能网联汽车的发展现状
• 自动驾驶道德标准
• 请回答:德国的自动驾驶道德标准里有哪些重要的内 容?有哪些重要的意义?
行融合,对道路、车辆、行人、交通标志和交通信号 等进行识别,决策分析和判断车辆驾驶模式和将要执 行的操作,并向控制和执行层输送指令。
智能网联汽车的组成
• 3.控制和执行层 • 控制执行层的主要功能是根据功能决策层的指令对车
辆进行操作和协调,为联网车辆提供道路交通信息、 安全信息、娱乐信息、救援信息、商务办公、在线消 费等,以保护汽车安全、舒适驾驶。比较传统车辆, 智能网联汽车在功能上主要增加了环境感知和定位系 统、无线通信系统、车辆自组织网络系统和先进的驾 驶辅助系统。
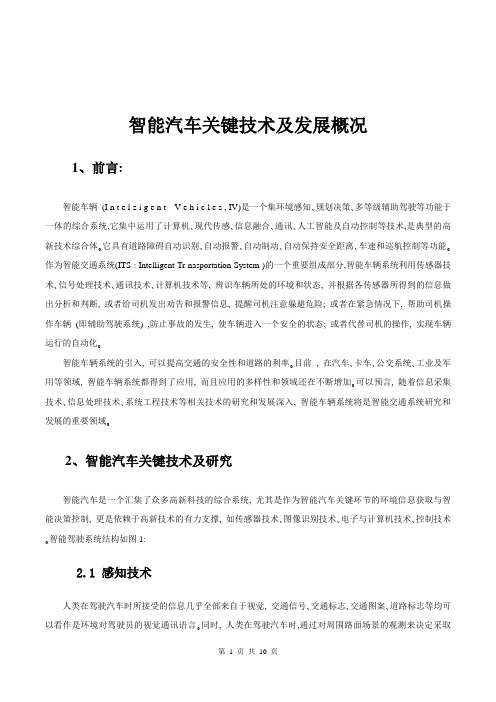
汽车传感器 技术
信息通信
感知系统 执行系统
交通运输
决策系统
请补充以下说明: • 环境感知技术包括哪些内容? • 智能决策技术包括哪些内容? • 控制执行技术包括哪些内容? • V2X通信技术包括哪些内容? • 云平台和大数据技术包括哪些内容? • 信息安全技术包括哪些内容? • 高精度地图和高精度定位技术包括哪些内容? • 标准与法规包括哪些内容? • 试验评价包括哪些内容?
智能网联汽车定义
• 我国在智能化的定义中分为哪五个层次?
智能化等级 等级名称
等级定义
人监控驾驶环境
控制
1(DA)
驾驶பைடு நூலகம்助
通过环境信息对方向和加减速中的一项操作提供支 援,其他驾驶操作都由人操作。
人与系统
2(PA)
部分自动驾 通过环境信息对方向和加减速中的多项操作提供支
驶
援,其他驾驶操作都由人操作
人与系统
• 2016年9月,为有效利用技术变化提供指导,美国交 通部发布了一项《联邦自动驾驶汽车政策》,为自动 驾驶安全部署提供政策监管框架。
• 2017年9月,发布了一项车辆升级与驾驶政策《自动 驾驶系统:安全愿景2.0》,该政策不仅被业界视为 自动驾驶汽车发展的指导方针,而且代表了联邦政府 对自动驾驶的态度。
智能网联行业背景分析
• 在时代发展背景下,国家对智能网联汽车产业战略发展的迫切要求
• 目前,美国、欧洲、日本等发达国家和地区也已将智 能网联汽车作为汽车产业未来发展的重要方向,加快 产业布局。跨国汽车企业已经实现了一些L2级自动驾 驶汽车的批量生产。一些高端品牌率先推出L3级自动 驾驶汽车,以谷歌为代表的新技术力量也在积极进行 全自动驾驶技术L4级、L5级的开发和测试。
策与控制系统的输入。
基于车-车、车-路、车-人、车-后台通信,
3
网联协同决策 与控制
实时并可靠获取车辆周边交通环境信息及车 辆决策信息,车-车、车-路等各交通参与者 之间信息进行交互融合,形成车-车、车-路
等各交通参与者之间的协同决策与控制。
控制
典型信息
传输需求
人
地图、交通流量、 交通标志、油耗、
里程等信息。
• 1.环境感知层 • 环境感知层的主要功能是通过车载环境感知技术、卫
星定位技术、4G/5G及V2X无线通信技术等,实现对 车辆自身属性和车辆外在属性(如道路、车辆和行人 等)静、动态信息的提取和收集,并向智能决策层输 送信息。
智能网联汽车的组成
• 2.智能决策层 • 智能决策层的主要功能是接收环境感知层的信息并进
国外智能网联汽车的发展现状
• 美国自动驾驶技术典型代表——Google Waymo
国外智能网联汽车的发展现状
• 美国对自动驾驶技术的发展在政策上做了工作与支持?
• 早在2013年,美国公路交通安全管理局就发布了《关 于自动驾驶仪车辆控制政策的初步意见》,并制定了 支持自动驾驶技术发展和推广的自动驾驶考试标准。
智能网联汽车定义
• 智能网联汽车将具备如下五大功能
个性化定 制
空中升级
安全提醒
紧急救援
车辆维修
请补充如下说明: • 空中升级包括哪些内容? • 安全提醒包括哪些内容? • 车辆维修包括哪些内容? • 紧急救援包括哪些内容? • 个性化定制包括哪些内容?
智能网联汽车的组成
• 智能网联汽车智能驾驶的核心技术由环境感知层、智能决策层以及控制和执行层组成。
国外智能网联汽车的发展现状
• 《未来交通准备:自动驾驶3.0》
• 2018年10月,最新发布的《未来交通准备:自动驾 驶3.0》表明美国运输部将努力消除妨碍自主车辆发 展的政策和法规,并支持将自主车辆纳入整个运输系 统。
国外智能网联汽车的发展现状
• 自动驾驶路试法规出台
• 2011年,内华达州率先通过了汽车驾驶汽车立法,解 决了州公路上自驾汽车的路试问题。
国外智能网联汽车的发展现状
• 2017年9月,美国众议院一致通过了《自动驾驶法案(SELF DRIVE ACT,H.R.3388)》
• 参考ppt中的备注,通读美国的自动驾驶法案。
• 请说明:自动驾驶法案对自动驾驶汽车技术的发展做 了哪些重要的规定?
请参考备注: 第1章 简称;目录 第2章 目的 第3章 美国交通安全管理局和宪法对自动驾驶汽车 的管理 第4章 更新的或新的高度自动化车辆的汽车安全标 准 第5章 自动驾驶系统的网络安全 第6章 一般豁免 第7章 机动车检测和评估 第8章 提供给潜在买家的高度自动化驾驶系统的信 息 第9章 高度自动化车辆咨询委员会 第10章 后座乘客警报系统 第11章 前照灯 第12章 高度自动化车辆所需的隐私保护计划
高度自动驾 驶
由无人驾驶系统完成所有驾驶操作,特定环境下系 统会向驾驶员提出响应请求,驾驶员可以对系统请 求不进行响应。
完全自动驾 无人驾驶系统可以完成驾驶员能够完成的所有道路
驶
环境下的驾驶操作。
系统 系统
系统 系统 系统
人
高速公路正常行驶工况, 市区无车道干涉路段。
系统 系统
高速公路全部工况及市区 有车道干涉路段。
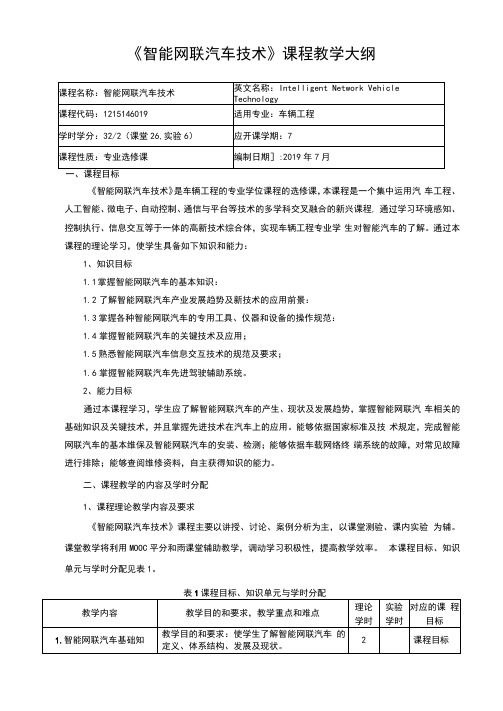
智能网联行业背景分析
• 自动驾驶车辆道路测试
• 北京市于2017年12月发布《北京市自动驾驶车辆道 路测试管理实施细则(试行)》及相关文件,确定33 条、共计105公里开放测试道路,已发放首批试验用 临时号牌。如图1-7所示,上海市2018年3月发布 《上海市智能网联汽车道路测试管理办法(试行)》, 划定第一阶段5.6公里开放测试道路,并发放第一批 测试号牌。重庆、保定也相继发布了相应的道路测试 实施细则。