多边形扫描转换与区域填充技巧
第二章 光栅图形学2--多边形的扫描转换与区域填充

山东科技大学信息学院
区域的连贯性
根据这些性质,实际上只需知道该长方形 区域内任一梯形内一点关于多边形P的内 外关系后,即可确定区域内所有梯形关 于P的内外关系。
山东科技大学信息学院
扫描线的连贯性
设e为一整数,yi0≥e≥yin。若扫描线y=e与多边形P的 Pi-1Pi相交,则记其交点的横坐标为xei。 现设xei1,xei2,xei3,…,xeil 是该扫描线与P的边界各交点 横坐标的递增序列,称此序列为交点序列。由区域的连贯 性可知,此交点序列具有以下性质:
山东科技大学信息学院
三、多边形的扫描转换
山东科技大学信息学院
1 逐点判断法
• 逐个判断绘图窗口内的像素: • 如何判断点在多边形的内外关系?
1)射线法: 2)累计角度法 3)编码法;
山东科技大学信息学院
逐点判断法
1)射线法
• 步骤: 1. 从待判别点v发出射线 2. 求交点个数k 3. K的奇偶性决定了点与多边形的内外关系
山东科技大学信息学院
3 扫描线种子填充算法
• 扫描线种子填充算法
–目标:减少递归层次 –适用于边界表示的4连通区域 算法思想:在任意不间断区间中只取一个种子 像素(不间断区间指在一条扫描线上一组相 邻元素),填充当前扫描线上的该段区间; 然后确定与这一区段相邻的上下两条扫描线 上位于区域内的区段,并依次把它们保存起 来,反复进行这个过程,直到所保存的个区 段都填充完毕。
逐点判断法程序简单, 速度太慢,效率低。
P1
v P2
山东科技大学信息学院
逐点判断法
• 逐点判断的算法虽然程序简单,但不可取。原 因是速度太慢,主要是由于该算法割断了各象 素之间的联系,孤立地考察各象素与多边形的 内外关系,使得几十万甚至几百万个象素都要 一一判别,每次判别又要多次求交点,需要做 大量的乘除运算,花费很多时间。
第6讲 扫描转换与区域填充

1
5 -3 P1P2
电子与信息工程学院 计算机科学与技术系
扫描线算法
●规则1:
X为小数,即交点落于扫描线上两个相邻像素之间
电子与信息工程学院 计算机科学与技术系
活性边表
8 7 6 5 4 3 2 P6(2,7) A F B P5(5,5) P3(11,3) P1(2,2) P2(5,1) 0 1 2 3 4 5 6 7 8 9 10 11 E C P4(11,8) G D
1
扫描线为6的活性表
P6P1 2 0 7 P5P6 3.5 -1.5 7 P4P5 7 2 8 P3P4 11 0 8
(a)交点位于左边之上,向右取整 (b)交点位于右边之上,向左取整
电子与信息工程学院 计算机科学与技术系
扫描线算法
●规则2:
边界上象素的取舍问题,避免填充扩大化。
●解决方法:
边界象素:规定落在右上边界的象素不予填充。
具体实现时,只要对扫描线与多边形的相交区间左闭右开
电子与信息工程学院 计算机科学与技术系
然后将该颜色扩展到整个区域的过程。
区域填充算法要求区域是连通的。
电子与信息工程学院 计算机科学与技术系
区域的连通性
四连通:从区域内一点出发,可通过 四个方向:上、下、左、右到达该区 域内部的任意象素。 八连通:区域内部从一个象素到达另 一个象素的移动路径,除了上、下、 左、右四个方向外,还允许沿着对角 线方向。
A
△ x y ma x
多边形的扫描转换与区域填充

实验三 多边形的扫描转换与区域填充在计算机图形学中,多边形有两种重要的表示方法:顶点表示和点阵表示。
顶点表示是用多边形的顶点序列来表示多边形,特点直观、几何意义强、占内存少,易于进行几何变换,但由于它没有明确指出哪些像素在多边形内,故不能直接用于面着色。
点阵表示是用位于多边形内的像素集合来刻画多边形。
这种表示丢失了许多几何信息,但便于帧缓冲器表示图形,是面着色所需要的图形表示形式。
光栅图形的一个基本问题是把多边形的顶点表示转换为点阵表示。
这种转换称为多边形的扫描转换。
一 多边形的扫描转换多边形可分为凸多边形、凹多边形、含内环多边形。
(1)凸多边形:任意两顶点间的连线均在多边形内。
(2)凹多边形:任意两顶点间的连线有不在多边形内的部分。
(3)含内环多边形:多边形内包含有封闭多边形。
扫描线多边形区域填充算法是按扫描线顺序,计算扫描线与多边形的相交区间,再用要求的颜色显示这些区间的像素。
区间的端点可以通过计算扫描线与多边形边界线的交点获得。
对于一条扫描线,多边形的填充过程可以分为4个步骤。
(1)求交:计算扫描线与多边形各边的交点。
(2)排序:把所有交点按x 值递增顺序排序。
(3)配对:第一个与第二个,第三个与第四个等,每对交点代表扫描线与多边形的一个相交区间。
(4)填色:把相交区间内的像素置成多边形颜色,把相交区间外的像素置成背景色。
具体实现方法:为多边形的每一条边建立一边表;为了提高效率,在处理一条扫描线时,仅对与它相交的多边形的边进行求交运算。
把与当前扫描线相交的边称为活性边,并把它们按与扫描线交点递增的顺序存放在一个链表中,称此链表为活性边表。
另外使用增量法计算时,需要知道一条边何时不再与下一条扫描线相交,以便及时把它从扫描线循环中删除出去。
为了方便活性边表的建立与更新,为每一条扫描线建立一个新边表(NET ),存放在该扫描线第一次出现的边。
为使程序简单、易读,这里新边表的结构应保存其对应边如下信息:当前边的边号、边的较低端点(x min ,y min )与边的较高端点(x max ,y max )和从当前扫描线到下一条扫描线间x 的增量∆x 。
多边形扫描线填充算法技巧

多边形扫描线填充算法技巧扫描线填充算法是计算机图形学中常用的一种填充算法,用于对多边形进行填充。
其基本原理是通过扫描线与多边形边界的交点来确定需要填充的像素点。
本文将介绍多边形扫描线填充算法的基本思想以及一些常用的优化技巧。
一、基本思想多边形扫描线填充算法的基本思想是将多边形分解成一系列水平线段,然后对每条水平线段进行扫描,找出与多边形边界相交的点,并进行填充。
具体步骤如下:1. 确定多边形的边界:对于给定的多边形,首先需要确定其边界。
可以使用边界表(edge table)来存储多边形的边界信息,包括每条边的起点和终点坐标以及斜率等。
2. 初始化扫描线:从多边形边界中找出最小的y坐标和最大的y坐标,作为扫描线的起点和终点。
3. 扫描线算法:对于每条扫描线,通过遍历边界表,找出与扫描线相交的边界线段。
根据相交点的x坐标,确定需要填充的像素点范围。
4. 填充像素点:根据上一步确定的像素点范围,将扫描线上的像素点进行填充。
二、技巧和优化1. 边界表的构建:为了提高算法的效率,可以对边界表进行排序,按照扫描线的y坐标来排序。
这样可以减少对边界表的遍历次数,提高算法的执行速度。
2. 边界交点的计算:在扫描线算法中,需要计算扫描线与多边形边界的交点。
可以使用活性边表(active edge table)来存储当前与扫描线相交的边界线段,并根据交点的x坐标进行排序。
这样可以减少计算交点的次数,提高算法的效率。
3. 填充像素点的优化:在填充像素点时,可以使用扫描线种子填充算法来进行优化。
该算法通过选择合适的填充起点,在填充过程中自动推进扫描线,减少不必要的计算和填充操作,提高填充的速度。
4. 填充规则的处理:在实际应用中,可能会遇到一些特殊情况,如多边形内部有孔洞或交叉等。
针对这些情况,可以通过修改填充规则来处理。
常用的填充规则有奇偶填充规则和非零填充规则,可以根据实际情况选择合适的填充规则。
5. 像素点颜色的处理:在多边形填充过程中,可以通过设置填充的颜色或纹理来实现不同的效果。
第四部分多边形的扫描转换与区域填充教学-资料
算法实现步骤
1)如边分类表ET中的第y类元素非空,则将属于该类的 所有边从ET中取出并插入边的活化链表中,AEL中的各 边按照x值(当x值相等时,按Δ x值)递增方向排序。
2)若相对于当前扫描线,边的活化链表AEL非空,则将 AEL中的边两两依次配对,即1,2边为一对,3,4边为 一对,依次类推。每一对边与当前扫描线的交点所构 成的区段位于多边形内,依次对这些区段上的点(象 素)按多边形属性着色。
贯性可知,此交点序列具有以下性质:
扫描线的连贯性
1)设L是偶数。 2)在该扫描线上,只有区段
(xeik,xeik+1),k=1,3,5,…,L-1位于多边形P内, 其余区段都在P外。
以上性质称为扫描线的连贯性,它是多边形 区域连贯性在一条扫描线上的反映。
边的连贯性
设d为一整数,并且d=e-1,并且 yi0≥d≥yin。设位于 扫描线y=d上的交点序列为xdj1,xdj2,xdj3,…,xdjk
y=yik
y=yik+1
区域的连贯性
根据这些性质,实际上只需知道该长方形 区域内任一梯形内一点关于多边形P的内 外关系后,即可确定区域内所有梯形关 于P的内外关系。
扫描线的连贯性
设e为一整数,yi0≥e≥yin。若扫描线y=e与多边形P的 Pi-1Pi相交,则记其交点的横坐标为xei。
现设xei1,xei2,xei3,…,xeil 是该扫描线与P的边界各交 点横坐标的递增序列,称此序列为交点序列。由区域的连
3)将边的活化链表AEL中满足y=ymax的边删去。 4)将边的活化链表AEL剩下的每一条边的x域累加Δ x,
即x:=x+Δ x。 5)将当前的扫描线的纵坐标值y累加1,即y:=y+1。
计算机图形学——多边形的扫描转换(基本光栅图形算法)
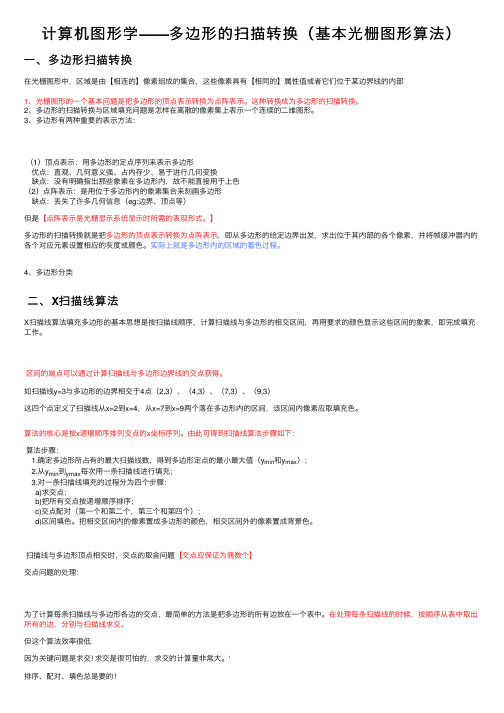
计算机图形学——多边形的扫描转换(基本光栅图形算法)⼀、多边形扫描转换在光栅图形中,区域是由【相连的】像素组成的集合,这些像素具有【相同的】属性值或者它们位于某边界线的内部1、光栅图形的⼀个基本问题是把多边形的顶点表⽰转换为点阵表⽰。
这种转换成为多边形的扫描转换。
2、多边形的扫描转换与区域填充问题是怎样在离散的像素集上表⽰⼀个连续的⼆维图形。
3、多边形有两种重要的表⽰⽅法:(1)顶点表⽰:⽤多边形的定点序列来表⽰多边形优点:直观、⼏何意义强、占内存少、易于进⾏⼏何变换缺点:没有明确指出那些象素在多边形内,故不能直接⽤于上⾊(2)点阵表⽰:是⽤位于多边形内的象素集合来刻画多边形缺点:丢失了许多⼏何信息(eg:边界、顶点等)但是【点阵表⽰是光栅显⽰系统显⽰时所需的表现形式。
】多边形的扫描转换就是把多边形的顶点表⽰转换为点阵表⽰,即从多边形的给定边界出发,求出位于其内部的各个像素,并将帧缓冲器内的各个对应元素设置相应的灰度或颜⾊。
实际上就是多边形内的区域的着⾊过程。
4、多边形分类⼆、X扫描线算法X扫描线算法填充多边形的基本思想是按扫描线顺序,计算扫描线与多边形的相交区间,再⽤要求的颜⾊显⽰这些区间的象素,即完成填充⼯作。
区间的端点可以通过计算扫描线与多边形边界线的交点获得。
如扫描线y=3与多边形的边界相交于4点(2,3)、(4,3)、(7,3)、(9,3)这四个点定义了扫描线从x=2到x=4,从x=7到x=9两个落在多边形内的区间,该区间内像素应取填充⾊。
算法的核⼼是按x递增顺序排列交点的x坐标序列。
由此可得到扫描线算法步骤如下:算法步骤:1.确定多边形所占有的最⼤扫描线数,得到多边形定点的最⼩最⼤值(y min和y max);2.从y min到ymax每次⽤⼀条扫描线进⾏填充;3.对⼀条扫描线填充的过程分为四个步骤:a)求交点;b)把所有交点按递增顺序排序;c)交点配对(第⼀个和第⼆个,第三个和第四个);d)区间填⾊。
计算机图形学5多边形扫描转换和区域填充

可编辑ppt
1
一、多边形的扫描转换
前面讲的画直线是一维图形的光栅化,就是如何在计算机 屏幕上即在一个离散的像素集上表示一个连续的图形。而多 边形的扫描转换和区域填充这个问题是怎么样在离散的像素 集上表示一个连续的二维图形。
多边形有两种重要的表示方法:顶点表示和点阵表示。
P2
当扫描线与多边形顶点相 交时,会出现异常情况。
解决方案: (1)、若共享顶点的两条 边分别落在扫描线的两边, 交点只算一个;
y
12 11 10
9 8 7 6 5 4 3 2 1
1 2 3 4 5 6 7 8 9 10 11 12 x
与多边形顶点相交的交点的处理
(2)若共享顶点的两条边在扫描线的同一边,这 时交点作为零个或两个。
凸多边形 凹多边形 含内环的多边形
有关概念
1) 区域:一组相邻而且又相连的像素,而且具有 相同属性的封闭区域。 2)种类:①单域 ②复合域
3) 区域填充:以某种属性对整个区域进行设置的过
程。
可编辑ppt
6
逐点判断填充算法
区域填充的基本(初级)方法:逐点判断填充算法
逐点判断绘图窗口内的每一个像素; 若在区域的内部:用指定的属性设置该点; 否则不予处理;
光栅图形的一个基本问题是把多边形的顶点表示转换为点阵 表示。这种转换称为多边形的扫描转换。
为什么叫扫描转换?因为光栅显示器是逐行扫描!
区域填充:指先将区域的一点赋予指定的颜色,然后将该颜 色扩展到整个区域的过程。
可编辑ppt
4
多边形分为凸多边形、凹多边形、含内环的多边 形等: (1)凸多边形 任意两顶点间的连线均在多边形内。 (2)凹多边形 任意两顶点间的连线有不在多边形内的部分。
多边形的扫描转换算法、区域填充算法

贵州大学计算机图形学实验报告学院:计算机科学与信息学院专业:软件工程班级:反映)根据扫描线的连贯性可知:一条扫描线与多边形的交点中,入点和出点之间所有点都是多边形的内部点。
所以,对所有的扫描线填充入点到出点之间的点就可填充多边形。
如何具体实现(如何找到入点、出点)?根据区域的连贯性,分为3个步骤:(1)求出扫描线与多边形所有边的交点;(2)把这些交点按x坐标值以升序排列;(3)对排序后的交点进行奇偶配对,对每一对交点间的区域进行填充。
步骤(3)如上图:对y=8的扫描线,对交点序列按x坐标升序排序得到的交点序列是(2,4,9,13),然后对交点2与4之间、9与13之间的所有象素点进行填充。
求交点、排序、配对、填色利用链表:与当前扫描线相交的边称为活性边(Active Edge),把它们按与扫描线交点x坐标递增的顺序存入一个链表中,称为活性边表AEL (AEL, Active Edge List)。
它记录了多边形边沿扫描线的交点序列。
AEL中每个对象需要存放的信息:ymax:边所交的最高扫描线;x:当前扫描线与边的交点;Δx:从当前扫描线到下一条扫描线之间的x增量next:指向下一对象的指针。
伪码:建立ET,置y为ET中非空桶的最小序号;置AEL表为空,且把y桶中ET表的边加入AEL表中;while AEL表中非空do begin对AEL表中的x、Δx按升序排列;按照AEL表中交点前后次序,在每对奇偶交点间的x段予以填充;计算下一条扫描线:y=y+1;if 扫描线y=ymax then 从AEL表中删除这些边;对在AEL表中的其他边,计算与下一条扫描线的交点:x=x +Δx 按照扫描线y值把ET表中相应桶中的边加入AEL表中;endend of algorithm二、区域填充算法:区域可采用两种表示形式:内点表示枚举区域内部的所有像素;内部的所有像素着同一个颜色;边界像素着不同的颜色。
边界表示:枚举出边界上所有的像素;边界上的所有像素着同一颜色;内部像素着不同的颜色。
多边形的转换及区域填充

弧长法(累计角度法) 步骤 从v点向多边形P各顶点发出射线,形成有向角 计算有向角的和,得出结论
逐点判断算法-小结
逐点判断的算法虽然程序简单,但不可取。原因是速度太慢,效率低。 主要是由于该算法割断了各象素之间的联系,孤立地考察各象素与多边形的内外关系,使得几十万甚至几百万个象素都要一一判别,每次判别又要多次求交点,需要做大量的乘除运算,花费很多时间。
扫描线算法-数据结构
扫描线算法-数据结构
(扫描线6的活性边表 ) AET (扫描线7的活性边表) AET
பைடு நூலகம்
单击此处可添加副标题
如何计算下一条扫描线与边的交点? 直线方程:ax+by+c = 0 当前交点坐标:(xi, yi) 下一交点坐标:(xi+1,yi+1) xi+1= ((-byi+1)-c)/a = (-b(yi+1)-c)/a =xi-b/a xi+1=xi+Δx(Δx=-b/a为常数 ) 活动边表中需要存放的信息 x:当前扫描线与边的交点 Δx=-b/a:从当前扫描线到下一条扫描线之间的x增量 ymax:边所交的最高扫描线,即边的上端点的y坐标;
扫描线的连贯性
交点个数为偶数。 交点之间的区段按交替的顺序依次出现在多边形内部和外部。 以上性质称为扫描线的连贯性,它是多边形区域连贯性在一条扫描线上的反映。
由扫描线y=e和多边形的所有交点递推出扫描线y=d=e+1与多边形各边的交点。 边的连贯性,它是区域的连贯性在相邻两扫描线上的反映。
扫描线
扫描线算法-数据结构
扫描线算法-数据结构
为了方便边的活性边表(AET)的更新,建立另一个表,即边表(ET----Edge Table) 边表中需要存放的信息 x: 扫描线与该边的初始交点,即边的下端点的x坐标 Δx:x的增量 ymax:该边的最大y值,即边的上端点的y坐标; 边表ET是按边的下端点的y坐标对非水平边进行分类的指针数组。下端点的y坐标的值等于i的边归入第i类。同一类中,各边按x值(x值相等时,按Δx的值)递增的顺序排列成行。
ch4多边形扫描&区域填充(3)

4向连通区域和8向连通区域
四个方向运动
八个方向运动
四连通区域
八连通区域
表示内点
表示边界点
2.3.2.1区域填充的递归算 法
内点表示的4连通区域的递归填充算法:
void FloodFill4(int x,int y,int oldcolor,int newcolor) { if(getpixel(x,y)==oldcolor) //属于区域内点 oldcolor { drawpixel(x,y,newcolor); FloodFill4(x,y+1,oldcolor,newcolor); FloodFill4(x,y-1,oldcolor,newcolor); FloodFill4(x-1,y,oldcolor,newcolor); FloodFill4(x+1,y,oldcolor,newcolor); } }
2.3.2.2区域填充的扫描线算法
算法步骤:
首先填充种子点所在扫描线上的位于给定区 域的一个区段 然后确定与这一区段相连通的上、下两条扫 描线上位于给定区域内的区段,并依次保存 下来。 反复这个过程,直到填充结束。
(1)初始化:堆栈置空。将种子点(x,y)入栈。 (2)出栈:若栈空则结束。否则取栈顶元素(x,y),以y作为 当前扫描线。 (3)填充并确定种子点所在区段:从种子点(x,y)出发,沿 当前扫描线向左、右两个方向填充,直到边界。分别标记区 段的左、右端点坐标为xl和xr。 (4)并确定新的种子点:在区间[xl,xr]中检查与当前扫描线y 上、下相邻的两条扫描线上的象素。若存在非边界、未填充 的象素,则把每一区间的最右象素作为种子点压入堆栈,返 回第(2)步。 上述算法对于每一个待填充区段,只需压栈一次;因此, 扫描线填充算法提高了区域填充的效率。
多边形的扫描转换和区域填充技巧

如何进行多 边形填充?
2020/1/21
20/82
Scan-Line Polygon-Filling
Determine the intersection positions of the region boundaries with the scan lines
Apply fill colors to each section of a scan line that lies inside the fill region (odd-even rule)
2020/1/21
ห้องสมุดไป่ตู้
提出问题
上一章讲述了如何生成点、线和圆等 基本几何构造。
本章重点如何在指定的输出设备上构 造多边形域、像素数组等高级图元
2020/1/21
2/82
主要内容 主要内容
矩形填充 内外测试 多边形扫描转换 区域填充 多边形扫描转换与区域填充的区别 反走样
ymax
2020/1/21
ymin xmin
xmax
6/82
2020/1/21
ymax
ymin 如何完成填充
的?? xmin
xmax
如何实现算法??
ymax
填充前 填充后
ymin xmin
xmax
7/82
矩形扫描转换算法
FillRect(Rect *rect, int color) { int x,y; for (y=rect->ymin;y<=rect->ymax,y++)
2020/1/21
26/82
填充步骤
(1)求交点 (2)交点排序
如何 高(3)效交点率配对 求交(4点)区?间填色
多边形的转换与区域填充
扫描线填充算法
解决方法:规定落在右/上边界的象素不予填充,而落在左/下边界的象素予以填充。 具体实现: 对扫描线与多边形的相交区间, 取“左闭右开”,如【2,9) 问题1保证了多边形的“下闭上开”
扫描线填充算法
为了求出扫描线与多边形边的交点,最简单的方法是将多边形的所有边放在一个表中,称之为边表,在处理每条扫描线时,从表中顺序取出所有的边,分别求这些边与扫描线的交点。这样做的结果将做一些无益的求交点动作,因为扫描线并不一定与多边形的边相交,扫描线只与部分甚至较少的边相交;因此,在进行扫描线与多边形边求交点时,应只求那些与扫描线相交的边的交点。我们把与当前扫描线相交的边称为活性边,并把它们按与扫描线交点 x 坐标递增的顺序存放在一个链表中,称此链表为活性边表。
边缘填充算法
算法过程
1
2
4.3 区域填充 4.3.1 区域的表示
区域指已经表示成点阵形式的填充图形,它是象素的集合。 区域填充指先将区域的一点赋予指定的颜色,然后将该颜色扩展到整个区域的过程。区域填充算法要求区域是连通的 区域建立和定义的方式: 内定义区域:区域内部所有象素具有同一种颜色或亮度值,而区域外的所有象素具有另一种颜色或亮度值。 漫水法:将该区域种的全部象素都设置为新值的算法,即填充内定义的区域 边界定义区域:边界上所有象素均具有特定的颜色或亮度值,而在区域内的象素则具有不是新值的某种颜色或亮度值 边界填充算法:将边界定义区域中的全部象素值都设置为新值的算法。
01
为了减少递归次数,相继出现改进的算法,最具代表性的是区域填充的扫描线算法
02
算法特点:
递归填充算法
扫描线区域填充算法
扫描线区域填充算法
算法步骤:
扫描线区域填充算法 上图所示是对四连通边界定义区域进行填充的扫描线算法的执行过程,其中 表示边界象素。
多边形扫描线填充算法的概念和步骤
多边形扫描线填充算法的概念和步骤嘿,咱今儿个就来聊聊多边形扫描线填充算法。
你知道不,这就像是给多边形这个大拼图上色一样有趣呢!多边形啊,它可不是个乖乖待着的主儿,有好多边和角呢。
那这扫描线填充算法呢,就是来搞定怎么把这些多边形填满颜色的。
想象一下,有一条线就像个小刷子似的,从这头刷到那头,把多边形的每一块都照顾到。
这就是扫描线啦。
它一格一格地走,每到一个地方,就看看和多边形有啥关系。
那具体步骤呢,咱可得好好说说。
首先得确定这个多边形的边啊,知道它们在哪儿,长啥样。
然后呢,这条扫描线就开始工作啦,它会和多边形的边相交,这就像它们在打招呼呢。
接着,就根据这些交点来算出要填充的区域。
这就好比是知道了要给哪块地播种一样。
然后啊,就开开心心地把颜色填上。
你说这神奇不神奇?就这么一步一步的,一个多边形就被漂亮地填满啦。
这可不比画画简单哦,这里面可有大学问呢。
比如说吧,要是交点算错了,那颜色可就填错地方啦,那就成大花脸啦!所以每一步都得仔细着点呢。
而且啊,这算法就像个小魔法师,能让那些奇奇怪怪形状的多边形都变得漂漂亮亮的。
它能让我们在屏幕上看到各种好看的图形,这可都是它的功劳呀。
你再想想,要是没有这个算法,那我们看到的图形不就干巴巴的,一点都不生动啦。
多边形扫描线填充算法,虽然名字听起来有点拗口,但它真的超级重要呢。
它就像一个默默工作的小工匠,为我们打造出美丽的图形世界。
怎么样,现在对这个多边形扫描线填充算法是不是有点感觉啦?它可不简单哦,是计算机图形学里的一个宝贝呢!以后再看到那些好看的图形,可别忘了背后有它的功劳哟!。
多边形的扫描转换边填充算法

多边形的扫描转换:扫描线算法:
扫描线算法
基本思想:一 条扫描线与多 边形的边有偶 数个交点
区域填充(扫描线算法)
算法步骤:
(1)确定多边形所占有的最大扫描线数,得到多边形顶点的最小和最大 y值(ymin 和 ymax);
边界表示:枚举出边界上所有的像素-》边界填充算法;
边界上的所有像素填充同一颜色; 内部像素填充与边界像素不同的颜色; 区域填充:对区域重新着色的过程,即从给定位置开始涂描直到指 定的边界条件为止; 将指定的颜色从种子点扩展到整个区域的过程; 区域填充算法要求区域是连通的; 一般步骤: 确定那些像素位于填充图元的内部; 确定以什么颜色填充这些像素;
•2)累计角度法 步骤: 从v点向多边形P顶点发出 射线,形成有向角; 计算有相交的和,得出结论;
n 0,v位于P之外
i
i0
2 , v位于P之内
预处理; 离散计算方法:编码方法;
逐点判断法
多边形的扫描转换
•3)编码方法:累计角度方法的离散方法
Step:
a.预处理,测试点在边上否?
存在问题:当扫描线与多边形顶点相交时,交点的取舍问题。如:扫描 线2正确,扫描线7错误。
区域填充(扫描线算法)
•解决方法:当扫描线与多边形的顶 点相交时:
• 若共享顶点的两条边分别落在 扫描线的两边,交点只算一个; • 若共享顶点的两条边在扫描线 的同一边,这时交点作为零个或 两个。 •多边形边界上象素的取舍问题: •例:2×2图形填充:若不加处理 则变成3×3; •解决办法:下闭上开;左闭右开;
任意多边形区域的快速填充算法

任意多边形区域的快速填充算法一、前言任意多边形区域的快速填充算法是计算机图形学中的一个重要问题,其应用广泛,例如在计算机游戏、数字地图等领域中都有广泛的应用。
本文将介绍几种常见的任意多边形区域的快速填充算法,包括扫描线算法、边界填充算法、种子填充算法等。
二、扫描线算法扫描线算法是一种基于扫描线原理的填充算法,其基本思想是将区域划分为若干个水平方向上的扫描线,然后在每条扫描线上找到交点,并根据交点进行填充。
具体步骤如下:1. 将多边形顶点按照纵坐标从小到大排序;2. 从最小纵坐标开始,依次向上扫描每条水平方向上的线段;3. 对于每条水平方向上的线段,找到与之相交的多边形边界,并记录下所有交点;4. 根据相邻两个交点之间是否为奇数个来确定是否需要进行填充。
三、边界填充算法边界填充算法也是一种常见的任意多边形区域的快速填充算法,其基本思想是通过递归调用来进行填充。
具体步骤如下:1. 对于每个多边形边界上的像素点,将其标记为“边界点”;2. 从任意一个未填充的内部像素点开始,向四周搜索,如果遇到“边界点”则停止搜索,并将搜索路径上的所有像素点标记为已填充;3. 重复步骤2直到所有内部像素点都被填充。
四、种子填充算法种子填充算法也是一种常见的任意多边形区域的快速填充算法,其基本思想是通过找到一个内部像素点作为“种子”,然后向四周扩散进行填充。
具体步骤如下:1. 随机选择一个内部像素点作为“种子”,并将其标记为已填充;2. 向四周搜索,如果遇到未被标记为已填充的像素,则将其标记为已填充,并加入到待处理列表中;3. 重复步骤2直到待处理列表为空。
五、总结以上介绍了几种常见的任意多边形区域的快速填充算法,每种算法都有其特定的优缺点,选择合适的算法需要根据具体的应用场景进行考虑。
在实际应用中,还需要考虑算法的效率、稳定性、可扩展性等方面的问题。
Class 5_多边形的扫描转换和区域填充_20180518

35
误差项递推:
d 2 F ( xi 0.5, yi 2) b 2 ( xi 0.5) 2 a 2 ( yi 2)2 a 2b 2 b 2 ( xi 0.5)2 a 2 ( yi 1)2 a 2b 2 a 2 (2 yi 3) d 2 a 2 (2 yi 3)
29
F ( x, y) b x a y a b 0
2 2 2 2 2 2
30
误差项递推:
d1 F(xi 2,yi 0.5 ) b2(xi 2 )2 a2(yi 0.5 )2 a2b2
b (xi 1 ) a (yi 0.5 ) a b b ( 2xi 3 )
(x+1,y);否则先将d更新为d+2(x-y)+5,再将(x,y)更新为(x+1,y-1);
5.当x ≤ y时,重复步骤3和4。否则结束。
22
程序段为:
void midb(int R,int x0,int y0)
{ int x,y,d; x=0; y=R; d= 1.25-R ; while( x<=y ) {circlepoint(x,y,x0,y0); if ( d<=0 ) d= d+2*x+3;
27
引理:若在当前中点,法向量的y分量比x分量大,即
b ( xi 1) a ( yi 0.5)
2 2
而在下一个中点,不等号改变方向,则说明椭圆弧从上部分转入下部分。
28
算法原理: 从(0,b)到(a,0)顺时针地确定最佳逼近于第一象限椭圆弧的像素序列。 在上半部分, -1 ≤ k ≤0 , 最大位移方向为x; 在下半部分, k ≤-1 , 最大位移方向为y; 分别对上半部分和下半部分依次判断中点与椭圆边的关系,即:判别 式的符号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Rotational method: Align each edge with the x axis
2020/11/22
多边形的扫描转换和区域填充技巧
11
多边形扫描转换
逐点判断算法 扫描线填充算法 边缘填充算法
2020/11/22
多边形的扫描转换和区域填充技巧
12
逐点判断算法
实现扫描转换多边形最简单的算法是逐 点判断,即判断一个像素是否在多边形 内部,是则填充颜色,否则放弃
ymax
2020/11/22
ymin xmin
多边形的扫描转换和区域填充技巧
xmax
6
ymax
ymin 如何完成填充
的?? xmin
xmax
如何实现算法??
ymax
填充前 填充后
2020/11/22
ymin xmin
多边形的扫描转换和区域填充技巧
xmax
7
矩形扫描转换算法
FillRect(Rect *rect, int color) { int x,y; for (y=rect->ymin;y<=rect->ymax,y++)
第5章
2020/11/22
多边形的扫描转换和区域填充技巧
提出问题
上一章讲述了如何生成点、线和圆等 基本几何构造。
本章重点如何在指定的输出设备上构 造多边形域、像素数组等高级图元
2020/11/22
多边形的扫描转换和区域填充技巧
2
主要内容 主要内容
矩形填充 内外测试 多边形扫描转换 区域填充 多边形扫描转换与区域填充的区别 反走样
2020/11/22
多边形的扫描转换和区域填充技巧
14
但在大多数图形应用中,我 们可以指定填充区域顶点的 任何次序,包括有相交的边 的次序。如图。对这样的形 状,平面上哪个区域是“内 部”和那个区域是对象的“外 部”并不是一目了然的。
图形软件包通常采用奇-偶 规则或非零环绕数规则来鉴 别物体的内部区域。
2020/11/22
多边形的扫描转换和区域填充技巧
作业
3
学习目标学习目标
深入认识图形函数包功能,了解函数是如何实现 的,从而可改进图形函数以适应某些特殊的应用 需求。
开发和改进图形技术,发展网络图形应用,开发 更快的实时性更强的图形显示。
掌握多边形生成算法
掌握区域填充算法
了解反走样概念和相应算法
Cross products of successive edge pairs are of different signs
Vertices are on both sides of an edge
Splitting:
Along the line of the first edge in the cross-product pair
for(x=rect->xmin;x<=rect->xmax;x++) setPixel(x,y,color);
}
2020/11/22
多边形的扫描转换和区域填充技巧
Content
8
多边形扫描转换
2020/11/22
多边形的扫描转换和区域填充技巧
9
Introduction to Polygons
Different types of Polygons
后面所讨论的多边形扫描线填充算法 是用奇偶规则的区域填充的一个例子。
2020/11/22
多边形的扫描转换和区域填充技巧
16
非零环绕数规则
2020/11/22
非零环绕数规则。它统计有向多边形边 环绕某一特定点的次数,这个数称为环 绕数。二维物体的内部点被定义为具有 环绕数为非0值。判定规则:在对多边形 应用非零环绕数规则时,将环绕数初始 化为零。从任意位置P画一射线,所选择 的射线不能与多边形任何顶点相交。当 从P点沿射线方向移动时,对穿过射线的 边记数,每当多边形从右到左穿过射线 时,环绕数加1,从左到右时,环绕数减 1。在所有穿过的边都已记数后的环绕数 的最后值决定P的相应位置。假如环绕数 为非0,则P定义为内部点,否则P是外 部点。
2020/11/22
多边形的扫描转换和区域填充技巧
15
奇偶规则
奇-偶规则,也称奇偶性规则或偶奇 规则,它在概念上从任何位置P到对 象坐标范围以外远距离画一直线(射 线),并统计沿该射线与各边的交点 数目。假如与这条射线相交的多边形 边数为奇数,则P是内部点,否则P 是外部点。
为了得到精确的边数,必须保证所画 射线不与任何多边形顶点相交。
两种常用的判断像素在多边形内部的方 法:
射线法—类似奇偶规则
弧长法—类似非0环绕数规则
缺点:速度慢、效率低
2020/11/22
多边形的扫描转换和区域填充技巧
13
内外测试
区域填充算法和其它图形处理常需要鉴别 对象的内部区域。
在基本几何形体中,多边形通常被定义为 不自交的。标准多边形的例子有三角形、 四边形、八角形和十角形。这些对象的组 成边仅在顶点处连接,在平面内没有其它 公共点。鉴别标准多边形的内部区域通常 是—个直观过程。
2020/11/22
多边形的扫描转换和区域填充技巧
4
参考资本料章主要参考资料
孙家广,计算机图形学(第三版) Computer Graphics with OpenGL,3rd Edition,
Hearn
2020/11/22
多边形的扫描转换和区域填充技巧
Content
5
矩形填充
ቤተ መጻሕፍቲ ባይዱ
特殊的多边形。在窗口系统中应用很多, 在图形软件包中将它单独当作一类图元 处理。
Simple Convex Simple Concave Non-simple : self-intersecting With holes
Convex
Concave
2020/11/22
多边形的扫描转换和区域填充技巧
Self-intersecting
10
Concave Polygons
Identifying:
多边形的扫描转换和区域填充技巧
17
对于标准多边形和其它简单 形状,奇偶规则和非零环绕 数规则会给出相同的结果, 但对于复杂形状,两种方法 会产生不同的内部和外部区 域。
用两种方法得到内外 判断结论不同
2020/11/22
多边形的扫描转换和区域填充技巧
18
确定有向边与射线相交的方法:
1.将从P点出发的射线向量u与边 向量E的叉积u×E,如果叉积的z 值大于0则,边从右到左穿过射线, 环绕数加1,否则环绕数减1。