仿形数字化加工技术课件
仿形加工PPT课件
模具的仿形加工
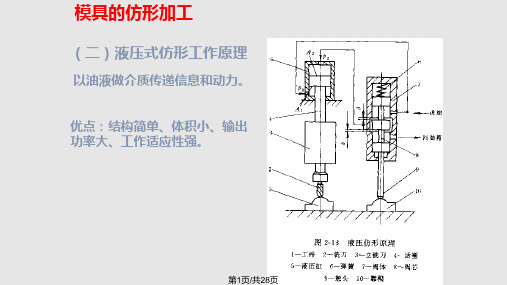
(三)电控式仿形工作原理
优点:结构紧凑、传递信号快、 易于实现远距离控制等。
第3页/共28页
模具的仿形加工
右图是立体仿形铣床跟踪系统 工作原理图。在加工过程中, 仿形触头9沿着靠模8相对移动, 而仿形触头始终是压向靠模表 面与其保持接触的,这就会使 触头产生轴向移动,从而发出 信号。此信号经过传感器变成 电信号,经随动系统放大后, 用来控制随动运动电机3,由 丝杠带动铣刀作与触头相应的 运动。电控式仿形的铣刀与触 头之间采用电伺服联动实现仿 形加工。
第20页/共28页
模具的仿形加工
(二)对靠模、刻刀和仿形触头的要求 靠模:比例选择、材料选择; 刻刀:高速钢或硬质合金,刻刀刃口锋利、尖细,单刃。
第21页/共28页
模具的仿形加工
第22页/共28页
模具的仿形加工
第23页/共28页
模具的仿形加工
第24页/共28页
模具的仿形加工
第25页/共28页
3、雕刻机可分为: (1)平面雕刻机:平面上的文字、数字和图案; (2)立体雕刻机:除用于平面雕刻外,还可进行小型 模具的三维立体型面雕刻;
第19页/共28页
模具的仿形加工
(一)缩放尺 缩放尺是雕刻机实现仿形加工的关键部件。
(1)用回转工作台: (2)四杆长度可调: (3)带传动、雕刻刀 直径小,为得到较大线 速度,要求主轴高速旋 转,一般为 4000~6000r/min。
第4页/共28页
模具的仿形加工
(四)电液式仿形工作原理 电液式仿形通过电传感器传递信息,利用液压作
为动力进行加工。 电传感器 电信号 电液转换机构 液压信号 液压执行机构, 液压执行机构驱动工作台作相应的运动。
《数控仿真加工》课件

数控仿真加工的常见问题与解决方法
1 机床故障
定期保养和维修机床可以减少故障发生的概率。
2 加工误差
优化刀具路径和工艺参数可以减少加工误差。
3 编程错误
仔细检查编程代码可以避免常见的编程错误。
数控仿真加工的未来发展趋势
数控仿真加工将更加智能化、自动化,并在工业生产中发挥更重要的作用。
数控仿真加工在工业生产中的 重要性
《数控仿真加工》PPT课 件
这个PPT课件将介绍数控仿真加工的全面知识,包括定义、优势和应用场景、 常用软件和工具、基本流程、编程语言和规范等内容。
什么是数控仿真加工?
数控仿真加工是利用计算机技术进行加工预先仿真,评估和优化的一种先进 的数控加工技术。
数控仿真加工的优势和应用场景
高效准确
数控仿真加工可以提供精确 的加工模拟,减少实际加工 中的误差。
数控仿真加工的程序设计和修改
程序设计包括选择合适的刀具路径、切削参数和加工顺序;修改程序可以优化加工效果和提高加工质量。
数控仿真加工的材料与工艺
材料
常用的材料包括金属、塑料、复合材料等。
工艺
常用的工艺包括铣削、车削、钻孔等。
数控仿真加工的工艺工程图与 装配图
工艺工程图和装配图用于说明加工的工艺过程和零件的装配方式。
3 Simufact
用于金属加工仿真分析的专业软件。
数控仿真加工的基本流程
1
设计模型
使用制图软件或CAD软件设计待加工的模型。
2
数控编程
使用编程语言将设计模型转化为数控机床可以识别的指令。
3
仿真验证
利用仿真软件验证程序的准确性和材料加工的合理性。
数控编程语言及其规范
培训课件:数控仿真加工共73页

培训课件:数控仿真加工
26、机遇对于有准备的头脑有特别的 亲和力 。 27、自信是人格的核心。
28、目标的坚定是性格中最必要的力 量泉源 之一, 也是成 功的利 器之一 。没有 它,天 才也会 在矛盾 无定的 迷径中 ,徒劳 无功。- -查士 德斐尔 爵士。 29、困难就是机遇。--温斯顿.丘吉 尔。 30、我奋斗,所以我快乐。--格林斯 潘。
Байду номын сангаас
6、最大的骄傲于最大的自卑都表示心灵的最软弱无力。——斯宾诺莎 7、自知之明是最难得的知识。——西班牙 8、勇气通往天堂,怯懦通往地狱。——塞内加 9、有时候读书是一种巧妙地避开思考的方法。——赫尔普斯 10、阅读一切好书如同和过去最杰出的人谈话。——笛卡儿
第三章 数控仿形加工实习
第三章数控仿形加工实习第一节数控仿形钻铣床ZJK7532A的操作3.1.1仿形系统概述1.仿形系统的基本原理⑴仿形的方式仿形加工根据仿形头退让的方向,可以分为三种方式:即一维仿形、二维仿形、三维仿形。
本实习指导书只介绍一维仿形。
⑵仿形的基本原理使用传感仿形头与X轴、Y轴和Z轴的坐标系统相应地进行传感,通过仿形头传感的各轴的偏转,三个轴的位移来合成综合位移,最后根据所选的仿形方式(一维、二维、三维仿形)分配各轴的速度。
仿形头对各轴的偏转输出εX、εY、εZ、εD中,根据仿形方式的不同,其相应的所使用的信号是不同的,具体见下表:一维仿形是指用εD对进给轴和仿形轴进行平面等速控制的仿形方式。
一维仿形的时候,仿形头(也称测头)只有一个退让的方向,即沿着所选定的仿形轴的方向退让。
例如,指定Z轴为仿形轴,X轴为进给轴时的一维仿形的仿形动作是判断εD的方向以决定Z的方向(是上升还是下降),根据εD的大小决定Z轴的速度。
根据有无行的进给,一维仿形可以分为下面两种形式:⑴X—Y平面上的一维仿形(无行的进给)。
⑵Z—X或Z—Y平面上的一维仿形(带Y轴或X轴方向上的行的进给)。
3.1.2仿形系统的操作主面板及功能介绍本仿形系统的操作主面板如下图3.1所示:⑴电源开关:钥匙开关,开机时必须首先打开。
⑵工作方式:波段开关,选择机床工作方式(自动、点动、单段、步进、回参考点。
)⑶超程解除:按钮。
⑷急停:按钮。
图3.1 ZKF7532A 教学仿形铣主操作面板⑸循环启动:点动按钮,按下后表示加工开始。
⑹进给保持:点动按钮,按下后表示加工暂停。
⑺冷却开/停:点动按钮,控制冷却液的开停。
⑻机床锁住:点动按钮,这个按钮连同下面的两个按钮只要按下一个便使加工停止。
⑼MST锁住:点动按钮。
⑽Z轴锁住:点动按钮。
⑾进给修调:波段开关,当拨到某一档时,表示当前的进给速度等于设定值乘以一个百分比(由波段开关确定)。
3.1.3与仿形加工有关的波段开关及按钮与仿形加工有关的一些波段开关及按钮如下图3.2所示:自动仿形之前,工作状态要选择“仿形加工”,工作方式要选择“自动”,然后再按下“循环启动”按钮。
数控加工仿真技术ppt课件

精选编辑ppt
23
加工中心系列面板--- SINUMERIK 802D
精选编辑ppt
24
加工中心系列面板---HNC-21M
精选编辑ppt
25
车床的相关功能---菜单功能
(工具) (工艺流程)
(选项)
(文件) (显示)
(教学管理)
精选编辑ppt
(帮助) 26
车床的相关功能---毛坯的设置
精选编辑ppt
模拟技术的高级阶段称为仿真模拟或系统仿 真,即用一数据处理系统来全部或部分地模 拟某一数据处理系统,以致于模仿的系统能 像被模仿的系统一样接受同样的数据、执行
同样的程序、获得同样的结果
▪ 主要用途:
主要用于科学研究、工业设计、模拟生产、 教学训练和考核鉴定等领域
精选编辑ppt
3
仿真(模拟)概述--国外应用
50
VNUC软件实例—加工中心换刀录象
精选编辑ppt
51
三、VNUC的介绍
精选编辑ppt
52
VNUC的开发背景
根据中华人民共和国劳动和社会保障部 实施“国家高技能人才培训工程—数控 工艺培训项目”的要求,立足职业院校 数控专业教学的实际情况进行研发的具 有自主知识产权的教学应用类软件。
数控加工仿真与 远程教学系统
VNUC
精选编辑ppt
1
数控加工仿真讲座提纲
▪ 仿真技术概述 ▪ VNUC数控加工仿真模块 ▪ VNUC远程教学考试系统 ▪ VNUC的介绍
精选编辑ppt
2
一、仿真技术概述
▪ 模拟技术:
选取一个物理的或抽象的系统的某些行为特 征,用另一系统来表示它们的过程
▪ 仿真模拟:
41
模具工艺ppt课件

返回
1.2 仿形加工
尾座靠模仿形
6—工件;7—板架;8—刀杆; 9—靠模;10—靠模支架
车削时,中拖板 作横向进给运动,刀 杆在靠模作用下产生 纵向运动,完成仿形 车削加工。这种方法 适用于端面仿形车削 。
返回
1.2 仿形加工
靠模选用要求
材料:3~5 mm厚的钢板或硬铝板制造。有些靠模与触头间作用压 力小的靠模可以选用硬木、铝材或环氧树脂制造,其型面的形状、 尺寸与模具零件的形状、尺寸须一致。
靠模销的倾斜角
靠模工作面的最小斜角 β
靠模销端头的圆弧半径R 靠模工作面的最小半径r
另外,靠模销的直径应与铣刀的直径一致,靠模 销的形状应与铣刀形状相适应。但实际加工中,有时 还要考虑机构惯性的影响,靠模销的尺寸可稍大于铣 刀尺寸。
1.2 仿形加工
b)
d)
图 仿形触头选择示意图
a)α<β正确 b)α>β不正确 c)R<r正确 d)R >r不正确
仿形雕刻加工
不同点
雕刻加工不是直 接作用式机械仿形加 工,而是通过缩放尺 进行仿形的。雕刻加 工是在雕刻机上进行 的。
雕刻机:用于加工文字、数字、刻度以及各种凹 凸图案花纹的专用机床,它也可以用于小型模具型腔 的加工。
1.2 仿形加工
1.2.5 雕刻加工
雕刻机分类
平面雕刻机:主要用于雕刻平面上文字、
仿形铣削可以在普通立式铣床上安装仿形装置来 实现,也可以在仿形铣床上进行。
1.2 仿形加工
1. 立式铣床上的仿形铣削 在普通立式铣床上应用仿形装置进行平面轮廓仿
形铣削,方法极其简单。 只需要将与工件成形表面形状相同或相似的靠模
板与工件一起固定在工作台上,即可进行成形铣削。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本系统存在的问题和不足之处,真诚欢 迎各位老师和同学指正。
➢仿形加工时仿形仪触指的尺寸必须与加工刀具一致;完成一个工件粗精加工的 不同阶段必须选用不同规格的刀具和仿形仪触指进行多次重复仿形加工;
➢ 控制系统必须是专用的仿形系统。
PPT学习交流
3
8.1.1.3 新型的数字化加工技术
产生于八十年代初。扫描过程与加工过程不是同时进行的。
扫描——采用模拟式扫描测头沿着未知模型的表面连续接触,采集模型表面 的坐标值,把采集的数据存入计算机中。
但激光数字化采集也存在着严重缺点:为防止杂 散反射,测量前需对工件表面进行处理,通常是 在工件表面喷上一层白色粉末;当被测表面的倾 角超过45º时,会出现一个辐射盲区,称为阴影效 应,从而不能准确测量工件表面的坐标位置。虽 然可通过多轴控制来减少或消除阴影效应,但增 加了系统的成本;精度较低。
PPT学习交流
意象限。
PPT学习交流
16
8.2.3.2 有摩擦实际情况
Z
VT
V
C
z
x O
VR P
有摩擦时测头的运动
实际上,由于球端与模 型表面存在摩擦力,CO 连线与P点的法线不再重 X 合,若仍然按上式控制 测头的运动,将导致测 头的压偏量增大或减小, 造成测头过压或离模, 因此必须在CO方向加一 速度使测头的合成速度V 和模型表面切线平行。
z
X
x O
PN
无摩擦时测头的运动
8.2.3.1 无摩擦理想情况
在平面轮廓的跟踪扫描过程中, 测头触指球端压向模型表面,在 法向反力的作用下,球端中心C产 生一空间压偏量。假设球端与模 型表面间无摩擦力,则CO连线为 球端与模型表面接触点P处的模型 法线方向。控制测头中心O不断地 沿接触点P的切线方向运动,即可 实现对模型的自动跟踪扫描。
VV/ V/
X
T z xz R x xz
VV/ V/
Z
T x xz R z xz
PPT学习交流
18
8.2.3.3 三维曲面跟踪
在三坐标铣床上进行三维曲面的跟踪扫描时, 测头的跟踪运动仍然在某一平面内进行,通过 对其垂直坐标方向的周期进给,实现分层扫描, 最后完成整个曲面的扫描测量。
PPT学习交流
19
PPT学习交流
10
8.1.3 常用测头类型
接触式模拟测头 接触式触发式测头 非接触式激光测头
PPT学习交流
11
触发式测头工作过程
PPT学习交流
12
8.2 曲面跟踪原理
信号处理 电路模板
外壳 硅油
弹簧片
动体
8.2.1 三维接触式模拟 仿形仪的基本结构
密封圈
ox
LVDT y o
z o
仿形指
zx o
第八章 仿形数字化加工技术
PPT学习交流
1
8.1 概述
8.1.1 仿形加工及数字化加工
8.1.1.1液压和电触发仿形
产生于五、六十年代。
8.1.1.2 新型的数控仿形机床
七十年代出现。是在计算机数控的基础上,采 样三维模拟仿形仪的压偏信号,利用相应的系 统控制软件,进行控制计算,向各个坐标轴发 出运动指令,实现模型表面的自动跟踪扫描, 与此同时,刀具完成工件的加工。
5
8.1.2 数字化扫描系统典型产品介绍
8.1.2.1 采用模拟扫描测头的扫描系统
英国Renishaw公司的扫描系统是采用模拟扫描测 头的扫描系统典型产品,可分为两类,即用于数 控机床的扫描系统(Retroscan、Retroscan200 和Retroscan350)和高速扫描机(Cyclone)。
PPT学习交流
17
VR的方向和大 = δ - δ0 。用ε调节VR ,使 ε
减至最小或零,则有
VK R
式中K为比例系数,于是VR的在X、Z方向的分量 VRX 、VRX为
V V /
RX
R
x
xz
V V /
RZ
Rz
xz
(8-2)
综合式(8-1)和(8-2),得
y
PPT学习交流
13
8.2.2 差动变压器的基本工作原理 LVDT——linear variable differential transformer
次级线圈A 初级线圈 次级线圈B
v0 (v)
+5
-1000
0 +1000
X ( m)
-5
磁屏蔽
铁芯
PPT学习交流
14
8.2.3 轮廓跟踪算法
Z
C
VT
xz
PPT学习交流
15
设切线方向的速度为V ,则其在X、Z方向的分量
T
V TX
和V TZ 分别为
V V /
TX
T
z
xz
V V /
TZ
T
x
xz
(8-1)
式中为 合成压偏量 22 。当沿测头
xz
xz
x
z
前进的方向看去,模型在测头的右侧时,取上部
符号;模型在测头的左侧时,取下部符号。 和
x
z
在测头坐标系中是带符号的,所以上式适用于任
PPT学习交流
6
Retroscan机床扫描系统
PPT学习交流
7
Retroscan200机床扫描系统
PPT学习交流
8
Retroscan350机床扫描系统
PPT学习交流
9
8.1.2.2 采用激光扫描测头的扫描系统
英国3D Scanners公司生产的Reversa是一个双视窗非 接触式激光扫描头,可装配在CNC机床、CMM三坐标 测量机上作高速和精准的扫描,所得物件三维数据能 够直接转化成一些标准格式的挡案,配合反求工程软 件(如Surfacer)或CAD/CAM系统(如UG,Pro-E或 CADDSS等),便可直接应用于产品设计开发、模具制 造、珠宝设计、快速成形、广告动画及医学等领域。 Reversa具有每秒15000点的扫描速度、精度高、多角 度扫描、四轴全自动扫描、五轴测头减少死角的特点。
数据处理——根据模具制造的需要,可以对扫描模型数据进行阴阳模转换、比例 缩放、镜像、旋转、平移等处理,然后生成需要的CNC加工程序,也可以生成各 种不同格式的CAD数据,送到其他CAD/CAM系统中进行进一步处理。
数控加工。
PPT学习交流
4
8.1.1.4 非接触式激光扫描技术
九十年代出现。可以对多种材料的模具进行非接 触式的数字化采集。
PPT学习交流
2
仿形加工的局限性:
➢只能加工出与实物模型相同的工件,不能进行对称形状的镜像加工、比例缩放 加工、凸凹模加工等;
➢加工时必须有实物模型,边仿形边加工,因而其仿形速度受到低切削速度的影 响;由于被仿形模型与待加工的毛坯必须同时安装在机床上,因此通常仿形机 床的工作台至少应是被仿形模型的两倍以上;