03 进入保护模式
植物新品种权

谢谢观看
权属性质
权属性质
植物新品种权与专利权、著作权、商标权一样,属于知识产权的范畴。由于知识产权是一种民事权利,所以, 植物新品种权也是一种民事权利。
作用
作用
植物新品种权保护的最终目的是鼓励更多的组织和个人向植物育种领域投资,从而有利于育成和推广更多的 植物新品种,推动我国的种子工程建设,促进农林业生产的不断发展。
申请程序
育种者应提交相应的申请文件。文件内容包括:植物新品种权请求书、说明书和照片。
文件准备齐全后,申请林业植物新品种权的申请人,可以直接向国家林业局提出申请,也可委托国家林业局 指定的代理机构代理申请。对于申请品种权的育种者,可以直接向国家林业局植物新品种保护办公室递交申请文 件,也可通过邮局邮寄申请文件。
由于我国对植物新品种权的法律保护还处于探索阶段,有必要对国际上现行的植物新品种权保护的相关制度 进行比较分析,以确定对植物新品种权的保护模式。
保护范围
保护范围
我国植物新品种保护工作是由国家林业局和农业部两个部门来进行的。根据两部门在植物新品种保护工作上 的分工,国家林业局负责林木、竹、木质藤本、木本观赏植物(包括木本花卉)、果树(干果部分)及木本油料、 饮料、调料、木本药材等植物新品种保护工作。我国对植物品种权的保护还仅限于植物品种的繁殖材料。对植物 育种人权利的保护,保护的对象不是植物品种本身,而是植物育种者应当享有的权利。
三是合作育种的品种权属于共同完成育种工作的单位和个人。 四是两个以上的申请人分别就一个植物新品种申请品种权时,品种权授予最先申请的人;同时申请的,品种 权授予最先完成的人。
五是植物新品种的申请权和品种权可以依法转让。在某种意义上讲,品种权实际上也是一种商品,因此也可 以按照市场经济的原则进入市场。
BIOS设置详解

BIOS设置详解BIOS设置详解其实有很多硬件问题是由于BIOS设置不当引起的,BIOS的设置正确与否,对系统的稳定性、性能的发挥都有很⼤的影响。
详细地了解其设置可以清楚地掌握电脑的运⾏状态,准确地分析各种硬件信息。
鉴于有很多朋友对BIOS的设置不甚了解,⽽不同的主板有不同的BIOS,设置⽅法也有所不同。
我在这⾥把⽹上找到的⼀些BIOS设置的详细⽅法写在这⾥,给⼤家⼀个参考:⼀、STANDARD CMOS SETUP(标准CMOS设置)这⾥是最基本的CMOS(Complementary Metal Oxide Semiconductor,)系统设置,包括⽇期、驱动器和显⽰适配器,最重要的⼀项是halt on:系统挂起设置,缺省设置为All Errors,表⽰在POST(Power On Self Test,加电⾃测试)过程中有任何错1、Drive A/Drive B选项:360K,5.25in;1.2M,5.25in;720K,3.25in;1.4M,3.25 in;2.88M,3.25in设置合适的驱动器(现在都是1.44M的啦),如果没有相应的硬件,尽量设为None,可以提⾼系统⾃检速度。
2、Video(视频)选项:EGA/VGA,Mono(⿊⽩显⽰器)设成EGA/VGA吧,不要尝试改为Mono,会减慢启动速度的。
⼆、BIOS FEATURES SETUP(BIOS特征设备)1、Virus Warning/Anti-Virus Protection(病毒警告/反病毒保护)选项:Enabled(开启),Disabled(关闭),ChipAway(芯⽚控制)这项设置可防⽌外部程序对启动区和硬盘分区表的写⼊,当发⽣写⼊操作时,系统会⾃动产⽣警告并提⽰⽤户中断程序的执⾏。
它并不能保护整个硬盘,⽽且对于操作系统的安装(例如/98)及某些磁盘诊断程序,甚⾄对BIOS的升级,都可能产⽣不必要某些主板⾃带有抗病毒内核,它可以提供⽐普通病毒警告更⾼⼀层的防卫,不过,当使⽤⾃带BIOS的外围控制器(如SCSI卡或UltraDMA 66控制卡)时,启动区病毒可以绕过系统BIOS来进⾏攻击,保护将完全失效。
骑客平衡车用户使用手册说明书

感谢您选择并购买骑客平衡车!骑客平衡车是一款能自动保持平衡的高科技微型电动双轮平衡车。
请认真阅读《用户使用手册》了解驾驶骑客平衡车的安全警告和注意事项后再进行使用。
《用户使用手册》能帮助您迅捷地了解、使用和维护平衡车。
本说明书中图示仅供参考产品以实物为准当您在驾驶平衡车上路之时, 请先学习如何安全驾驶,以避免发生碰撞、摔倒和失去控制等危险。
您可以通过查看《用户使用手册》学习安全驾驶技术。
本《用户使用手册》向客户告知所有操作说明和注意事项, 平衡车产品使用者必须仔细阅读并按本说明书的要求操作, 如果产品使用者未按提示操作或违反警示内容,所产生的一切后果,本公司将不承担任何责任。
如果想得到产品的相关服务支持, 请拨打服务热线:400-0856-188。
1.1 关于本手册1.2 驾驶的风险1.3 驾驶前的准备工作1.4 文档相关说明 (03) (03) (03) (03)1、文档概述------------------------------------------------------------------ -----------032.1 平衡车车型描述2.2 平衡车车组件描述2.3 平衡车工作原理 (04) (05) (06)2、产品介绍------------------------------------------------------------------ -----------043.1 脚踏传感器3.2 显示板 (07) (07)3、平衡车控制及信息显示装置------------------------------------------------------ -----------074.1 驾驶者的重量限制4.2 续航里程4.3 速度限制4.4 APP/蓝牙 (08) (09) (09).................................................................................................................................................................104、安全使用平衡车------------------------------------------------------------- -----------08目录01025.1 平衡车操作步骤5.2 平衡车保护功能5.3 驾驶练习 (11) (14) (15)5、学习驾驶平衡车------------------------------------------------------------- -----------117.1 电池电量7.2 充电步骤7.3 温度过高或者过低情况7.4 运输电池时注意事项 (18) (19) (20) (20)7、电池使用说明--------------------------------------------------------------- -----------188.1 清洁8.2 存放 (21) (21)8、日常保养------------------------------------------------------------------ -----------216、驾驶安全指导--------------------------------------------------------------- -----------169、平衡车参数---------------------------------------------------------------- -----------2210、装箱单------------------------------------------------------------------ -----------3011、故障处理----------------------------------------------------------------- -----------311. 文档概述1.1 关于本手册为了您的驾驶安全,在使用平衡车之前请仔细阅读本手册, 确保能够按照正确的指导驾驶平衡车。
风云2使用说明书-04

3.3
手动模式
3.3.1 当切换手动模式时,换档手柄触发“A/M”开关,手动模式激活(转速表的绿色 “AUTO”、“ECO”灯熄灭,手动模式也可以通过同样的方式解除)。手动模式激 活时,驾驶员可以手动选择档位来得到自己需要的汽车性能。
注意: 手动模式下,显示器会显示系统当前档位(N,1,2,3,4,5 或 R)。 N 档、1 档和 R 档的切换,必须踩住制动踏板方可实现。
奇瑞汽车股份有限公司 2013 -03
机械式自动变速箱 8
奇瑞风云 2 AMT 使用说明书
4.3 “爬行”功能 4.3.1 当发动机启动后,在挂 D 档或 R 档的情况下,不需要踩下油门踏板,松开制动踏 板汽车即可缓慢行驶。
注意: 在挂 D 档或 R 档前,请务必确认车辆周围的路况。 在挂 D 档或 R 档前,请松开驻车制动器,避免离合器异常磨损。
标有“注意”警告标志的内容表明操作车辆时应该注意的事项。无视这些信息可能导致 错误的操作。
奇瑞汽车股份有限公司 2013 -03
机械式自动变速箱 3
奇瑞风云 2 AMT 使用说明书
AMT 的使用:
汽车装备一套 AMT 变速箱,这种变速箱是通过一套电控液压装置来控制机械变速箱 本体,从而实现变速箱自动进行离合器及选、换档控制。 在现有机械变速箱的基础上附加一套电控液压装置来实现离合器以及换档的自动控 制。
奇瑞汽车股份有限公司 2013 -03 机械式自动变速箱 4
奇瑞风云 2 AMT 使用说明书
换档手柄的位置是可变的,它有三个稳态位置(见图 2 空心位置)和三个可变位置 (见图 2 实心位置): ① 三个稳态位置分别为:空档(N),倒档(R),前进档(换档手柄位于两个可变位置 +/-之间,自动模式下初始为 D 档,手动模式下初始为 1 档)。 ② 三个可变位置分别为:升档请求(+)、降档请求(-)和转换开关位置(A/M)。 1.3 E 按键介绍
x86汇编语言:从实模式到保护模式(第2版)

16.1 任务的隔离和特权级保护 16.2 代码清单16-1 16.3 内核程序的初始化 16.4 加载用户程序并创建任务 16.5 用户程序的执行 本章习题
17.1 本章代码清单 17.2 任务切换前的设置 17.3 任务切换的方法 17.4 用jmp指令发起任务切换的实例 17.5 处理器在实施任务切换时的操作 17.6 程序的编译和运行 本章习题
第9章 硬盘和 显卡的访问与 控制
5.1 计算机的启动过程 5.2 创建和使用虚拟机
6.1 本章代码清单 6.2 欢迎来到主引导扇区 6.3 注释 6.4 在屏幕上显示文字 6.5 显示标号的汇编地址 6.6 使程序进入无限循环状态 6.7 完成并编译主引导扇区代码 6.8 加载和运行主引导扇区代码 6.9 程序的调试技术
7.1 代码清单7-1 7.2 跳过非指令的数据区 7.3 在数据声明中使用字面值 7.4 段地址的初始化 7.5 段之间的批量数据传送 7.6 使用循环分解数位 7.7 计算机中的负数 7.8 数位的显示 7.9 其他标志位和条件转移指令
8.1 从1加到100的故事 8.2 代码清单8-1 8.3 显示字符串 8.4 计算1到100的累加和 8.5 累加和各个数位的分解与显示 8.6 程序的编译和运行 8.7 8086处理器的寻址方式 本章习题
3.1 寄存器和字长 3.2 内存访问和字节序 3.3 古老的INTEL 8086处理器 本章习题
4.1 汇编语言程序 4.2 NASM编译器 4.3 配书文件包的下载和使用 本章习题
第6章 编写主引 导扇区代码
第5章 虚拟机的 安装和使用
第7章 相同的功 能,不同的代码
第8章 比高斯 更快的计算
精彩摘录
这是《x86汇编语言:从实模式到保护模式(第2版)》的读书笔记模板,可以替换为自己的精彩内容摘录。
MPR300电机保护器使用说明书
1. 控制器的面板及端子功能介绍...................................................................................................... 01 2. 典型接线原理图...............................................................................................................................02
地址:四川省成都市武侯科技园区武青南路 33 号 A 座 2F 邮编:610000 电话:+86-28-85020481 传真:+86-28-85020431
四川法高电气有限公司
4.8.10 起动加速超时保护.................................................................................................. 16 4.8.11 温度保护...................................................................................................................17 4.8.12 外部故障保护.......................................................................................................... 17 4.8.13 相序保护...................................................................................................................17 4.9 控制功能参数的设定.............................................................................................................18 4.9.1 控制权限.......................................................................................................................18 4.9.2 起动时间.......................................................................................................................19 4.9.3 自起动功能...................................................................................................................19 4.9.4 重起动功能...................................................................................................................19 4.10 控制器初始参数的设定...................................................................................................... 19 4.10.1 通讯功能.....................................................................................................................20 4.10.2 控制键功能.................................................................................................................20 4.10.3 模拟量输出功能.........................................................................................................20 4.10.4 额定功率.....................................................................................................................20 4.10.5 额定电压.....................................................................................................................20 4.10.6 满负载电流.................................................................................................................20 4.11 开关量的设定.......................................................................................................................21 4.11.1 开关量输入功能的设定.............................................................................................21 4.11.2 开关量输出功能的设定.............................................................................................21 4.12 控制器版本号.......................................................................................................................22 4.13 密码管理...............................................................................................................................22
HOBBYWING ESC用户手册说明书
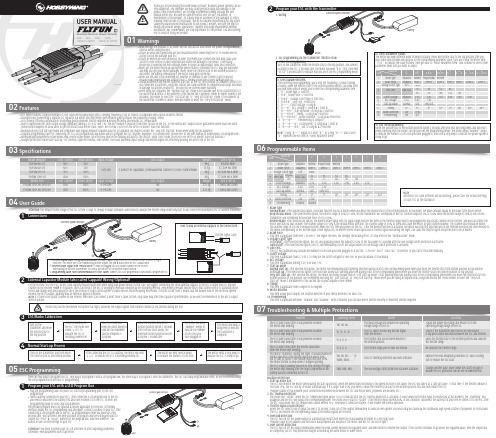
0103Specifications04User Guide05ESC Programming06Programmable Items07Troubleshooting & Multiple ProtectionsExternal Capacitor Module (also called Cappack) Wiring (Optional)2• DEO (Driving Efficiency Optimization) Technology greatly improves throttle response & driving efficiency and reduces ESC temperature.• Built-in high-power BEC with output voltage adjustable among 5.2V, 6.0V and 7.4V. The BEC module is separate from other circuits on the ESC, so the normal BEC output can be guaranteed (when issue like burntpower board happens) to allow users to get the aircraft back before crash. (Note: the FLYFUN 130A/160A HV OPTO V5 doesn’t have this function.)• Normal/Soft/Very Soft start-up modes are compatible with regular propeller airplanes and EDF jet airplanes (pls ensure to select the “Very Soft Start-up” mode when using EDF jet airplanes).• Separate programming cable for connecting ESC to a LED program box and allows users to program the ESC anytime, anywhere. (For detailed info, please refer to the user manual of HOBBYWING LED program box.)• Normal/proportional/reverse brake modes (esp. reverse brake mode) can effectively shorten the landing distance for the aircraft. (Note: the FLYFUN 130A/160A-HV-OPTO-V5 doesn’t have this function.)• Multiple protection features like start-up, ESC thermal, capacitor thermal, over-current, over-load, abnormal input voltage and throttle signal loss effectively prolong the service life of the ESC.There are two ways to program the ESC. One way is to program it with a LED program box; the other way is to program it with the transmitter. The ESC has many programmable items, so we recommend usingthe LED program box to do the ESC programming.For the FLYFUN 80A/120A-V5, its BEC load capacity may be insufficient when using high power servos. In that case, we suggest connecting the stock external cappack to the BEC’s output end (i.e. any idlechannel on the receiver *note 1) in parallel. Users can check if the BEC is working in overload condition by the following method: keep moving relevant throttle sticks (that control servos) to start/stop thoseservos and change directions quickly to see if the receiver or flight control system (if exists) will be restarted during the process. If restart occurs, then it means that the sudden load of the electronic systemexceeds the BEC’s output capability and an external cappack is needed.Note 1: if there is no vacant channel on the receiver, then users can connect a short, thick Y cable (as thin, long cable may affect the capacitor’s performance, so we don’t recommend it) to the BEC’s outputwires in parallel.40A · 60A · 80A · 120A130A HV OPTO · 160A HV OPTOUSER MANUALBrushless Electronic Speed Controller1. Brake TypeNormal Brake: After selected this option, the brake function will be activated when you move the throttle stick to the bottom position. In this mode, the brake amount equals to the brake force you’ve preset.Proportional Brake: After selected this option, the throttle range of 20% to 100% (on the transmitter) will correspond to the ESC throttle output of 0% to 100% while the throttle range of 20% to 0% (on thetransmitter) will correspond to the brake force of 0 to 100%.Reverse Brake: After selected this option, the Reverse Brake signal wire (its signal range must be the same as the throttle range) must to be plugged into any vacant channel on the receiver, and you can control themotor direction via that channel. The channel range of 0-50% is the default motor direction, the channel range of 50% to 100% will cause the motor to spin counterclockwise. The channel stick should be withinthe channel range of 0-50% (0 would be better) when the first time you power on the ESC. After the Reverse function is activated, the motor will stop first and then spin in the reversed direction and then increase tothe speed corresponding to the throttle input. Either signal loss, no matter reverse brake signal loss or throttle signal loss during the flight, can cause the throttle signal loss protection to be activated.2. Brake ForceThis item is adjustable from level 1 to level 7. The higher the level, the stronger the braking effect. It’s only effect in the “Normal brake” mode.3. Voltage Cutoff TypeSoft Cutoff: After selected this option, the ESC will gradually reduce the output to 50% of the full power in 3 seconds after the low-voltage cutoff protection is activated.Hard Cutoff: After selected this option, the ESC will immediately cut off the output when the low-voltage cutoff protection is activated.4. LiPo Cells:The ESC will automatically calculate the number of LiPo cells you have plugged in as per the “3.7V/Cell” rule if “Auto Calc.” is selected, or you can set this item manually.5. Cutoff VoltageThis item is adjustable from 2.8V to 3.8V (they are the cutoff voltages for one cell); or you can disable it if necessary.6. BEC VoltageThis item is adjustable among 5.2V, 6.0V and 7.4V.7. Start-up ModeNormal Start-up: After selected this option, the motor will immediately start spinning and then quickly reach to the corresponding speed when you move the throttle stick from bottom position to top position.Soft Start-up: After selected this option, the motor will slowly start spinning and then quickly reach to the corresponding speed when you move the throttle stick from bottom position to top position.Very Soft Start-up: After selected this option, the motor will slowly (slower than in “Soft Start-up Mode”) start spinning and then quickly reach to the corresponding speed when you move the throttle stick frombottom position to top position. We recommend selecting the “Soft Start-up” or “Very Soft Start-up” mode when you are flying an airplane with a big-sized ducted fan. Please ensure to select the “Very SoftStart-up” mode if the diameter of the ducted fan on your airplane is over 90mm.8. TimingThis item is adjustable from 0 degree to 30 degrees.9. Motor RotationThis item allows you to adjust the rotation direction of your motor between CW and CCW.10. FreewheelingThis item is adjustable between “Enabled” and “Disabled”. With it enabled, you can have better throttle linearity or smoother throttle response.Multiple Protections1. Start-up Protection:The ESC will monitor the motor speed during the start-up process. When the speed stops increasing or the speed increase is not stable, the ESC will take it as a start-up failure. At that time, if the throttle amount isless than 15%, the ESC will try to restart automatically; if it is larger than 20%, you need to move the throttle stick back to the bottom position first and then restart the ESC.(Possible causes of this problem: poor connection/ disconnection between the ESC and motor wires, propellers are blocked, etc.)2. ESC Thermal Protection:The motor will “stutter” when the ESC temperature goes above 110℃ to indicate that the ESC thermal protection is activated. If lower down the throttle input to below 60% at this moment, the “stuttering” willdisappear and the ESC will output the corresponding power. The motor will re-start to “stutter” if the throttle input exceeds 60%. In this condition, disconnect the battery first and then re-connect it to the ESC afterthe ESC cools down (the ESC temperature cannot exceed 70℃, otherwise it cannot be started), it will resume the normal operation.3. Throttle Signal Loss Protection:When the ESC detects loss of signal for over 0.25 second, it will cut off the output immediately to avoid an even greater loss which may be caused by the continuous high-speed rotation of propellers or rotor blades.The ESC will resume the corresponding output after normal signals are received.4. Overload Protection:The ESC will cut off the power/output or automatically restart itself when the load suddenly increases to a very high value.(Possible cause to the sudden load increase is that propellers are blocked or the motor and the ESC are out of sync.)5. Over-current Protection:The ESC will cut off the output immediately when the peak current exceeds the regulated value, and then restart to resume the output. If the current continues to go above the regulated value, then the output willbe completely cut off. This protection may be activated by the burnt motor or some others.Note:different ESCs have different default settings, please take the default settingsof each ESC as the standard.)01故障描述电调通电以后不工作,鸣叫报警提示音“哔哔,哔哔,哔哔,哔哔,…...”说明输入的电压不在电调的工作电压之内。
DOS的系统杂项服务INT15H介绍
DOS的系统杂项服务INT 15H介绍00H-开盒式磁带机马达01H-关盒式磁带机马达02H-读盒式磁带机03H-写盒式磁带机0FH-格式化ESDI驱动器定期中断21H-读/写自检(POST)错误记录4FH-键盘截听91H-设备加电自检80H-设备打开C0H-读取系统环境81H-设备关闭C1H-读取扩展BIOS数据区地址82H-进程终止C2H-鼠标图形83H-事件等待C3H-设置WatcHdog超时84H-读[游戏]杆C4H-可编程选项选择85H-系统请求(SysReq)键86H-延迟87H-移动扩展内存块88H-读取扩展内存大小89H-进入保护模式90H-设备等待91H-设备加电自检C0H-读取系统环境C1H-读取扩展BIOS数据区地址C2H-鼠标图形C3H-设置WatcHdog超时C4H-可编程选项选择(1)、功能00H功能描述:开盒式磁带机马达入口参数:AH=00H出口参数:CF=0--操作成功,否则,AH=状态(86H,若未安装盒式磁带机)(2)、功能01H功能描述:关盒式磁带机马达入口参数:AH=01H出口参数:CF=0--操作成功,否则,AH=状态(86H,若未安装盒式磁带机)(3)、功能02H功能描述:读盒式磁带机入口参数:AH=02HCX=读入的字节数ES:BX=存放数据的缓冲区地址出口参数:CF=0--操作成功,DX=实际读入的字节数,ES:BX指向最后一个字节的后面地址,否则,AH=状态码,其值含义如下:01H--CRC校验码错80H--非法命令02H--位信号混乱86H--未安装盒式磁带机04H--无发现数据(4)、功能03H功能描述:写盒式磁带机入口参数:AH=03HCX=要写入的字节数ES:BX=已存数据的缓冲区地址出口参数:CF=0--操作成功,CX=00H,ES:BX指向最后一个字节的后面地址,否则,AH=状态码,其值含义如下:80H--非法命令86H--未安装盒式磁带机(5)、功能0FH功能描述:格式化ESDI驱动器定期中断,仅在PS/2中有效,在此从略(6)、功能21H功能描述:读/写自检(POST)错误记录,仅在PS/2中有效,在此从略(7)、功能4FH功能描述:键盘截听,仅在PS/2中有效,在此从略(8)、功能80H功能描述:打开设备入口参数:AH=80HBX=设备号CX=进程号出口参数:CF=0--操作成功,AH=00H,否则,AH=状态码(9)、功能81H功能描述:关闭设备入口参数:AH=81HBX=设备号CX=进程号出口参数:CF=0--操作成功,AH=00H,否则,AH=状态码(10)、功能82H功能描述:进程终止入口参数:AH=81HBX=进程号出口参数:CF=0--操作成功,AH=00H,否则,AH=状态码(11)、功能83H功能描述:事件等待入口参数:AH=83H若需要事件等待,则:AL=00HCX:DX=千分秒ES:BX=信号量字节的地址否则,调用参数为AL=01H出口参数:若调用时,AL=00H,操作成功--CF=0,否则,CF=1(12)、功能84H功能描述:读[游戏]杆入口参数:AH=84HDX=00H--读取开关设置=01H--读取阻力输入出口参数:CF=1H--操作失败,否则,DX=00H时,AL=开关设置(位7~4)DX=01H时,AX、BX、CX和DX分别为A(x)、A(y)、B(x)和B(y)的值(13)、功能85H功能描述:系统请求(SysReq)键入口参数:AH=85HAL=00H--键按下=01H--键放开出口参数:CF=0--操作成功,AH=00H,否则,AH=状态码(14)、功能86H功能描述:延迟入口参数:AH=86HCX:DX=千分秒出口参数:CF=0--操作成功,AH=00H(15)、功能87H功能描述:从常规内存和扩展内存之间移动扩展内存块入口参数:AH=87HCX=移动的字数ES:SI=GDT(Global Descriptor Table)的地址,其结构定义如下:偏移量存储的信息00h-0Fh保留,但现全为010h-11h段的长度(2CX-1或更大)12h-14h24位源地址15h访问权限字节(其值为93h)16h-17h保留,但现全为018h-19h段的长度(2CX-1或更大)1Ah-1Ch 24位目标源地址1Dh访问权限字节(其值为93h)1Eh-2Fh保留,但现全为0出口参数:CF=0--操作成功,AH=00H,否则,AH=状态码,其含义如下:01H--RAM奇偶错02H--异常中断错03H--20号线门地址失败(16)、功能88H功能描述:读取扩展内存大小入口参数:AH=88H出口参数:AX=扩展内存字节数(以K为单位)(17)、功能89H功能描述:进入保护模式,CPU从实模式进入保护模式入口参数:AH=89HBH=IRQ0的中断号BL=IRQ8的中断号ES:SI=GDT的地址(参见功能号87H)出口参数:CF=1--操作失败,AH=0FFH,否则,AH=00H,CS、DS、ES 和SS都是用户定义的选择器(18)、功能90H功能描述:设备等待入口参数:AH=90HAL=驱动器类型,具体的驱动器类型定义如下:=00H~7FH--串行再重用设备=80H~0BFH--可重入式设备=0C0H~0FFH--等待访问设备,没有自检功能00h-磁盘02h-键盘80h-网络FDh-软盘马达启动01h-软盘03h-点设备(Pointing Device)FCh-硬盘复位FEh-打印机ES:BX=对驱动器类型80H~0FFH的请求块地址出口参数:CF=1--操作失败,否则,AH=00H(19)、功能91H功能描述:设备加电自检入口参数:AH=91HAL=00H~7FH--串行再重用设备=80H~0BFH--可重入式设备出口参数:AH=00H(20)、功能0C0H功能描述:读取系统环境入口参数:AH=0C0H出口参数:成功CF=0并且AH=0,ES:BX=配置表地址,配置表的定义如下:偏移量含义说明00h-01h表的大小(字节数)02h系统模型03h系统子模型04hBIOS版本号05h配置标志,其各位为1时的说明如下:位7-DMA通道3使用位6-存在从属8259位5-实时时钟有效位4-键盘截听有效位3-等待外部事件有效位2-扩展BIOS数据区位1-微通道设施位0-保留06h-09h保留(21)、功能C1H功能描述:读取扩展BIOS数据区地址,仅在PS/2中有效,在此从略(22)、功能C2H功能描述:鼠标图形,仅在PS/2中有效,在此从略(23)、功能C3H功能描述:设置WatcHdog超时,仅在PS/2中有效,在此从略(24)、功能C4H功能描述:可编程选项选择,仅在PS/2中有效,在此从略。
EEPROM原理与应用

ONE
KEEP VIEW
XX
XX
EEPROM原理与应用
XX
XX
XX
汇报人:XX
REPORTING
XX
CATALOGUE
目 录
• EEPROM基本概念与原理 • EEPROM类型及性能参数 • EEPROM在嵌入式系统中的应用 • EEPROM在通信协议中的应用 • EEPROM编程实践指导 • EEPROM市场前景及发展趋势
系统升级与维护
在嵌入式系统中,EEPROM可用于存储固件程序或升级文件。当系统需要升级或维护时 ,微控制器可以从EEPROM中读取相应的文件并执行相应的操作,从而实现对系统的更 新和维护。
PART 05
EEPROM编程实践指导
开发环境搭建与工具准备
硬件准备
01
选择合适的EEPROM芯片,并准备好相应的开发板和连接线。
注意EEPROM的工作电压、工 作温度和封装等参数,确保与 实际应用环境相匹配。
PART 03
EEPROM在嵌入式系统 中的应用
数据存储与读取功能实现
01
02
03
非易失性存储
EEPROM可在断电后保留 数据,适用于需要长期保 存的数据。
读写操作
EEPROM支持按字节或按 页进行读写操作,方便灵 活。
数据保持时间指的是在规定的温度范围内 ,EEPROM中的数据可以保持不丢失的最 长时间。
选型注意事项
根据应用需求选择合适的 EEPROM类型,例如串行或并
行EEPROM。
根据存储容量需求选择合适的 EEPROM芯片,确保足够的存
储空间。
考虑EEPROM的擦写次数和写 入速度等性能参数,以满足应 用要求。
基于CiteSpace的铁路遗产研究文献计量分析与展望
渐重视对城市现有资源的挖掘和再利用。
铁路遗产作为遗产保护中的一个热点类别。
针对铁路遗产的研究在全国范围内相继展开,且已积累了一定的经验与成果。
系统分析当下我国铁路遗产相关研究的特点,能为未来的研究提供思路。
因此,本文利用CiteSpace 软件,系统分析铁路遗产研究文献,以可视化图谱的形式对我国铁路遗产研究现状进行分析总结,并提出对我国铁路遗产未来的展望。
1数据收集和研究方法1.1数据来源国内数据:对CNKI (中国知网)数据库进行高级检索,选取来源类别为“全部期刊”,以“铁路遗产”和“铁路遗存”为关键词,共得到“学术期刊”类别文献164篇,通过进一步筛选,最终得到153篇有效文献,时间跨度为2003-04-20至2022-04-24,以此作为本次分析铁路遗产研究的基础数据。
国外数据:对Web of Science(WOS)数据库进行检索,选取“所有数据库”类别,并以“railway heritage”为主题在WOS 中检索研究文献,设置检索年为“不限”,共得到文献317篇,通过查看研究目标,最终得到针对中国铁路遗产的研究文献共计9篇,时间跨度为2012-11-28至2022-03-10。
1.2研究方法本文利用CiteSpace5.8.R3软件绘制铁路遗产研究相关知识图谱,时间跨度为2003—2022年,提取节点阈值选择top50,选择Pathfinder 和Pruning sliced networks 模式,生成作者、机构、关键词等相关图谱。
最终通过图谱解读使读者了解铁路遗产研究的发展历程和具体研究内容,并发现铁路遗产研究的发展趋势。
摘要 铁路遗产具有历史、文化、技术等多重价值,对其保护利用能够促进城市经济和文化的发展。
文章基于CNKI 和WOS 数据库,利用CiteSpace 软件进行发文数量、作者、机构、期刊及研究热点的可视化分析,并绘制相应的知识图谱。
研究发现,我国对铁路遗产的研究主要经历了形成、成长、发展三个阶段,研究范围愈加广泛,研究内容愈加细致。
PEPS系统车辆无法检测到钥匙故障分析与排查

10.16638/ki.1671-7988.2021.011.055PEPS系统车辆无法检测到钥匙故障分析与排查马森,张立峰,刘艳红,陈佳龙(北汽福田汽车股份有限公司工程研究总院,北京102200)摘要:文章主要讲PEPS(Passive Entry & Passive Start,被动进入与被动启动)系统的车辆在使用过程中出现的无法检测到钥匙的故障分析过程、故障排除过程。
熟悉PEPS控制单元的工作原理,并结合总线数据采集设备(如CANoe、PEAK等),可快速锁定故障原因,制定解决措施,及时将问题封闭。
关键词:被动进入与被动启动;钥匙;总线数据中图分类号:U463.99 文献标识码:A 文章编号:1671-7988(2021)11-171-03Failure Analysis and Troubleshooting for Vehicles with PEPS System thatCannot Detect the KeyMa Sen, Zhang Lifeng, Liu Yanhong, Chen Jialong( Beiqi Foton Motor Co., Ltd., Engineering Research Institute, Beijing 102206 )Abstract: This article mainly talks about the failure of the vehicle with the PEPS system that cannot detect the key. The engineers need to perform fault analysis and troubleshooting. The engineers familiar with the working principle of PEPS control unit, combined with bus data acquisition equipment (Such as CANoe, PEAK, etc.). The cause of the failure can be quickly identified, and we can formulate solutions in time to close the problem in time.Keywords: Passive Entry & Passive Start; Key; Bus dataCLC NO.: U463.99 Document Code: A Article ID: 1671-7988(2021)11-171-03引言PEPS(Passive Entry & Passive Start,被动进入与被动启动)系统在汽车中的应用是智能化技术与汽车制造技术的结合,未来有很大的发展空间,汽车大量普及后,PEPS系统以其使用方便和防盗性能高等特点,逐渐得到广大用户的认可和接受。
投资法与投资保护的政策与法规解读

可以采取线上或线下的形式,包括课程培训、专题讲座、模拟交易等多
种形式。
03
投资者教育和培训的监管
要求金融机构、教育机构等开展投资者教育和培训工作时,应当遵守相
关法律法规和监管要求,确保教育和培训的质量和效果。
06 未来发展趋势及 挑战应对
国际投资法改革动态
1 2 3
国际投资法体系变革
当前国际投资法体系正经历重大变革,包括国际 投资争端解决机制、外资准入制度、投资保护标 准等方面的改革。
投资法与投资保护的政策与 法规解读
目 录
• 投资法概述与核心原则 • 投资保护政策及其措施 • 法规解读:关键条款与案例分析 • 投资争议解决机制及途径 • 投资者权益保障制度设计 • 未来发展趋势及挑战应对
01 投资法概述与核 心原则
投资法定义及作用
投资法定义
投资法是指国家为了调整投资关 系,规范投资行为而制定的法律 规范的总称。
国外投资法体系
国外投资法体系因国家而异,但一般都包括投资准入、投资待遇、投资保护、投资争议解 决等方面的规定。例如,美国有《外国投资与国家安全法案》,日本有《外汇及外国贸易 管理法》等。
国内外比较
国内外投资法体系在立法理念、法律原则、制度设计等方面存在差异。国内投资法注重保 护投资者权益和维护市场秩序,而国外投资法则更加注重国家安全和外商投资的管理。
协商、调解等非诉讼方式
协商
争议双方通过友好协商,达成和解协 议,解决投资争议。协商具有灵活性 和保密性,可以避免长时间的诉讼程 序。
调解
在第三方调解机构的协助下,争议双 方进行调解,达成调解协议。调解具 有灵活性和高效性,可以减轻法院负 担,促进争议双方的和解。
仲裁、诉讼等诉讼方式
主板维修之主板诊断卡跑代码

主板维修之诊断卡的简单使用在主板维修中有的时候我们不知道如何下手,那就让诊断卡来帮帮忙!诊断卡指示灯CLK 总线时钟--- 只要一块空板(无CPU等)接通电源就应常亮,BIOS ----输入输出运行时对BIOS有读操作就闪亮。
IRDY ---(不知道是什么)OSC 振荡---ISA槽的主振信号,空板上电则应常亮,否则停振。
FRAME 帧周期---- PCI槽有循环帧信号时灯才闪亮,平时常亮。
RST 复位----开机或按了RESET开关后亮半秒钟熄灭必属正常。
12V 电源----空板上电即应常亮,无此电压或主板有短路。
-12V 电源---- 空板上电即应常亮,无此电压或主板有短路。
5V 电源--------空板上电即应常亮,无此电压或主板有短路。
-5V 电源----空板上电即应常亮,无此电压或主板有短路。
(只有ISA槽才有此电压)3.3V 电源---- 这是PCI槽特有的3.3V电压,空板上电即应常亮!不同主板的诊断卡走数会有不同,常见的有下面3种:OO-CO=C1-C3-Ob-Od-3d-42-6F-7F-FFFF-C1-1d-2b-3d-42-6F-7F-FFFF-d3-d4-Ob-2A-31-4E跑0E ,13 ,26, 2B ,31 ,38, 42, 48, 4E ,52, 58 ,6F ,7F, 85 或任一代码后跑00 ,FF都是正常的. 41(华硕部分板)除外,如果是以上代码还不能正常显示则重点查显卡部分。
上一篇:没有了下一篇:南桥发烫的维修及南桥击穿的判断方法主板诊断卡跑C0故障总结1、CPU座接触不良(CPU座虚焊)占多数;2、BIOS程序不对(经常刷错BIOS会导致这样的问题);3、I/O芯片损坏;(可能性比较大)4、南桥虚焊或南桥芯片损坏;(建议多挤压南桥试试)5、CPU控制总线出错;进行打阻值,有无短路或开路6、主板超频(478的板上会有100MHZ和133MHZ选项,据CPU选择适当的频率);7、北桥空焊或都北桥本身损坏。
丹佛斯变频器问题集解读

丹佛斯变频器问题集解读丹佛斯变频器问题集(来⾃官⽹)1.FC300出现A88报警的处理⽅法?回答:当移除选件、增加选件或进⾏选件替换时,会出现A88报警。
如出现A88报警,同时不希望保留原有参数,可进⾏以下操作:1. 断开主电源,等待显⽰器关闭。
2. 在为LCP 102 加电时,同时按[Status] 、[ Main Menu] 、[OK] 键3. 5秒后松开这些键。
4. 除了P15-00 运⾏时间、P15-03 加电次数、P15-04 过温次数、P15-05 过压次数,变频器其它参数更改为出⼚设置。
5、LCP显⽰A80,变频器初始化报警。
按住[Reset]键,复位报警A80。
重新设置客户需要设置的参数。
如出现A88报警,同时希望保留原有参数,可进⾏以下操作1、将参数P14-89设置为【1】更改选件;2、给变频器重新上电;3、变频器将出现报警A67,选件已更改。
4、按住[Reset]键,复位报警A67。
2.FC系列变频器AMA(电机⾃整定)流程?回答:除了FC51,其它FC系列变频器均有AMA功能。
AMA是测量停⽌状态下电动机上的电⽓参数,在系统试运⾏以及根据所应⽤的电机对变频器进⾏优化调整时⾮常有⽤。
AMA分为完整AMA,检测定⼦和转⼦的阻值、抗值,精简AMA,只检测定⼦阻值。
设置⽅法如下:注意事项:为实现变频器的最佳调整,请对冷电机执⾏AMA。
反复进⾏AMA可能导致电机发热,从⽽使定⼦电阻增⼤;只有当电动机额定电流下降到变频器额定输出电流的35%时,才会进⾏AMA;在安装使⽤了正弦波滤波器时,请执⾏精简的AMA测试,P1-29设置【2】,或者在执⾏完整AMA时,拆下正弦波滤波器,完成AMA后,再重新装回;如果电动机以并联⽅式耦合在⼀起,只能进⾏精简AMA;使⽤同步电机,请进⾏精简AMA,并⼿动设置扩展的电动机数据;AMA功能不适⽤于永久磁性电动机;在AMA过程中,确保没有外⼒强制电机主轴运动3.W163的含义及产⽣原因?回答:W163,防爆ETR电流极限警告。
BIOS中断大全
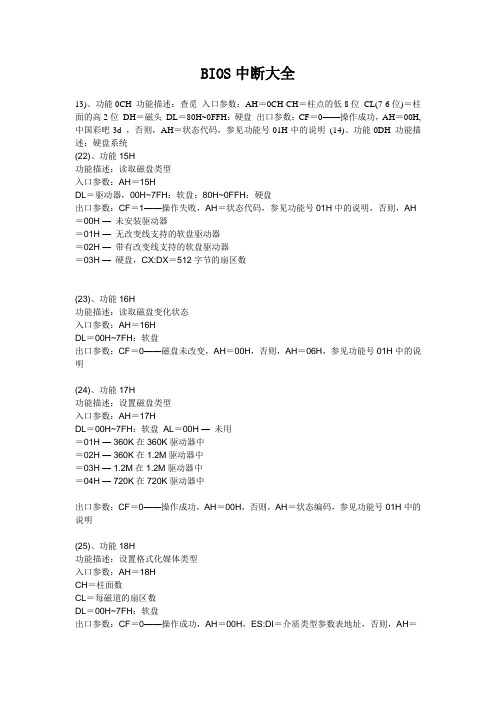
BIOS中断大全13)、功能0CH 功能描述:查觅入口参数:AH=0CH CH=柱点的低8位CL(7-6位)=柱面的高2位DH=磁头DL=80H~0FFH:硬盘出口参数:CF=0——操作成功,AH=00H, 中国彩吧3d ,否则,AH=状态代码,参见功能号01H中的说明(14)、功能0DH 功能描述:硬盘系统(22)、功能15H功能描述:读取磁盘类型入口参数:AH=15HDL=驱动器,00H~7FH:软盘;80H~0FFH:硬盘出口参数:CF=1——操作失败,AH=状态代码,参见功能号01H中的说明,否则,AH =00H —未安装驱动器=01H —无改变线支持的软盘驱动器=02H —带有改变线支持的软盘驱动器=03H —硬盘,CX:DX=512字节的扇区数(23)、功能16H功能描述:读取磁盘变化状态入口参数:AH=16HDL=00H~7FH:软盘出口参数:CF=0——磁盘未改变,AH=00H,否则,AH=06H,参见功能号01H中的说明(24)、功能17H功能描述:设置磁盘类型入口参数:AH=17HDL=00H~7FH:软盘AL=00H —未用=01H — 360K在360K驱动器中=02H — 360K在1.2M驱动器中=03H — 1.2M在1.2M驱动器中=04H — 720K在720K驱动器中出口参数:CF=0——操作成功,AH=00H,否则,AH=状态编码,参见功能号01H中的说明(25)、功能18H功能描述:设置格式化媒体类型入口参数:AH=18HCH=柱面数CL=每磁道的扇区数DL=00H~7FH:软盘出口参数:CF=0——操作成功,AH=00H,ES:DI=介质类型参数表地址,否则,AH=状态编码,参见功能号01H中的说明(26)、功能19H功能描述:磁头保护,仅在PS/2中有效,在此从略(27)、功能1AH功能描述:格式化ESDI驱动器,仅在PS/2中有效,在此从略3、串行口服务(Serial Port Service——INT 14H)00H —初始化通信口03H —读取通信口状态01H —向通信口输出字符04H —扩充初始化通信口02H —从通信口读入字符(1)、功能00H功能描述:初始化通信口入口参数:AH=00HDX=初始化通信口号(0=COM1,1=COM2,……)AL=初始化参数,参数的说明如下:波特率奇偶位停止位字的位数76543210000 = 110X0 = None0 = 1 bit10 = 7 bits001 = 15001 = Odd1 = 2 bits11 = 8 bits010 = 30011 = Even011 = 600100 = 1200101 = 2400110 = 4800111 = 9600关于PS/2,可用INT 14H之功能04H与05H来初始化其通信速率大于9600。
2009款科鲁兹发动机进入保护模式
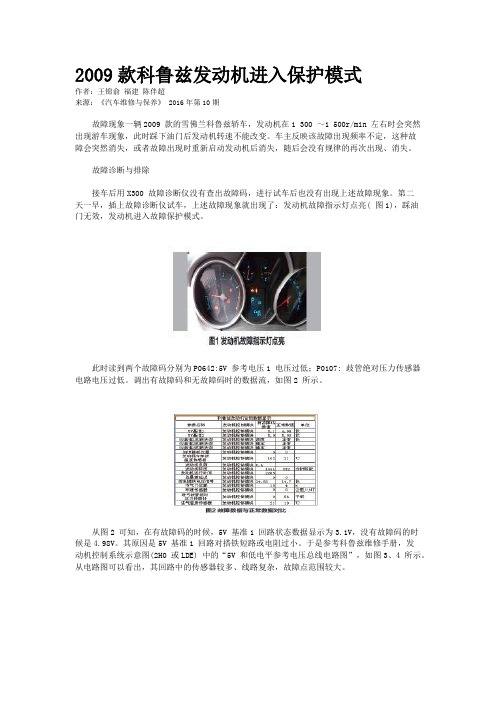
2009款科鲁兹发动机进入保护模式作者:王锦俞福建陈伴超来源:《汽车维修与保养》 2016年第10期故障现象一辆2009 款的雪佛兰科鲁兹轿车,发动机在1 300 ~1 500r/min 左右时会突然出现游车现象,此时踩下油门后发动机转速不能改变。
车主反映该故障出现频率不定,这种故障会突然消失,或者故障出现时重新启动发动机后消失,随后会没有规律的再次出现、消失。
故障诊断与排除接车后用X300 故障诊断仪没有查出故障码,进行试车后也没有出现上述故障现象。
第二天一早,插上故障诊断仪试车,上述故障现象就出现了:发动机故障指示灯点亮( 图1),踩油门无效,发动机进入故障保护模式。
此时读到两个故障码分别为P0642:5V 参考电压1 电压过低;P0107: 歧管绝对压力传感器电路电压过低。
调出有故障码和无故障码时的数据流,如图2 所示。
从图2 可知,在有故障码的时候,5V 基准1 回路状态数据显示为3.1V,没有故障码的时候是4.98V。
其原因是5V 基准1 回路对搭铁短路或电阻过小。
于是参考科鲁兹维修手册,发动机控制系统示意图(2H0 或LDE) 中的“5V 和低电平参考电压总线电路图”,如图3、4 所示。
从电路图可以看出,其回路中的传感器较多、线路复杂,故障点范围较大。
首先对故障码“P0107:歧管绝对压力传感器电路电压过低”的原因进行了分析和排查。
该故障码的原因可能是线路或连接器对搭铁短路、传感器本身或控制模块等。
排查诊断结果发现,歧管绝对压力传感器和线路或连接器都正常,5V 参考电压此时也正常。
控制模块发生故障的可能性比较小,在另一故障码“P0642 :5V 参考电压1 电压过低”真实原因未弄清楚前,因其成本较高,不能更换控制模块K20。
5V 参考电压1 过低原因可能是:(1)5V 参考电压1 回路的线路或连接器对搭铁短路;(2) 传感器中5V 电压电路对搭铁短路;(3) 发动机控制模块损坏。
可现在故障码数据流中5V 参考电压还有3.1V,不是一种典型的搭铁短路,否则电压会是零或零点几伏,所以这个回路系统中的大多数传感器没有产生故障码。
MPR300电机保护器使用说明书
安全基线检查及部分中间件部署规范

安全基线检查及部分中间件部署规范@author: jerrybird,JC0o0l@wechat: JC_SecNotes@wechat: JC0o0l@GitHub: /chroblert/assetmanage这篇⽂章是之前做基线检查⼯具参考的⼀些规范,⼤家可以通过下⾯的链接下载pdf⽂档:链接:https:///s/1z_m0HpAWSgRYahbsI5DeAg提取码:i4ft(⼀) Centos7安全基线0x01 初始设置1. ⽂件系统配置:2. 安全启动设置:3. 强制访问控制:0x02 服务配置1. 时间同步设置:0x03 ⽹络配置1. hosts设置:2. 防⽕墙配置0x04 审计设置1. 审计配置⽂件的设置2. 审计规则⽂件的设置0x05 ⽇志设置0x06 认证授权1. 配置cron:2. 配置SSH:3. 配置PAM:4. ⽤户账户和环境设置:0x07 系统维护1. 重要⽂件权限:2. ⽤户和组设置:(⼆) Windows2012安全基线0x01 账户策略0x02 审计策略0x03 ⽤户权限分配0x04 安全选项0x05 端⼝安全0x06 系统安全(三) MSSQL2016部署规范0x01安装更新和补丁0x02 减少受攻击⾯0x03 认证和授权0x04 密码策略0x05 审计和⽇志0x06 加密0x07 扩展存储(四) MySQL5.6部署规范0x01 操作系统级别配置0x02 安装和计划任务0x03 权限设置0x04 常规设置0x05 MySQL权限0x06 审计和⽇志0x07 ⾝份认证(五) 中间件部署规范0x01 Nginx安全部署规范1. 隐藏版本号2. 开启HTTPS3. 限制请求⽅法4. 拒绝某些User-Agent5. 利⽤referer图⽚防盗链6. 控制并发连接数7. 设置缓冲区⼤⼩防⽌缓冲区溢出攻击8. 添加Header头防⽌XSS攻击9. 添加其他Header头0x02 Tomcat安全部署规范1. 更改Server Header2. 保护telnet管理端⼝3. 保护AJP连接端⼝4. 删除默认⽂档和⽰例程序5. 隐藏版本信息(需要解jar包)6. 专职低权限⽤户启动tomcat7. ⽂件列表访问控制8. 脚本权限回收0x03 Apache安全部署规范1. 专职低权限⽤户运⾏Apache服务2. ⽬录访问权限设置3. ⽇志设置4. 只允许访问web⽬录下的⽂件5. 禁⽌列出⽬录6. 防范拒绝服务7. 隐藏版本号8. 关闭TRACE功能9. 绑定监听地址10. 删除默认安装的⽆⽤⽂件11. 限定可以使⽤的HTTP⽅法0x04 IIS安全部署规范1. 限制⽬录的执⾏权限2. 开启⽇志记录功能3. ⾃定义错误页⾯4. 关闭⽬录浏览功能5. 停⽤或删除默认站点6. 删除不必要的脚本映射7. 专职低权限⽤户运⾏⽹站8. 在独⽴的应⽤程序池中运⾏⽹站0x05 Redis安全部署规范1.专职低权限⽤户启动redis2. 限制redis配置⽂件的访问权限3. 更改默认端⼝4. 开启redis密码认证5. 禁⽤或者重命名危险命令6. 禁⽌监听在公⽹IP7. 开启保护模式0x06 RabbitMQ 规范1. 专职低权限⽤户启动RabbitMQ2.配置SSL证书3. 开启HTTP后台认证4. 删除或修改默认的guest⽤户和密码5. RabbitMQ的web ui插件存在⼀些安全漏洞(⼀) Centos7安全基线0x01 初始设置1. ⽂件系统配置:1.1 将/tmp挂载⾄⼀个单独的分区1.2 /tmp挂载时指定noexec:不允许运⾏可执⾏⽂件该选项使得/tmp⽬录下的⼆进制⽂件不可被执⾏1.3 /tmp挂载时指定nosuid该选项使得/tmp⽬录下的⽂件或⽬录不可设置Set-UID和Set-GID标志位,能够防⽌提权。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当计算某个单元的物理地址时,比如汇编语言中的一个Label ,就通过段地址( 16-bit )左移4 位得到段基址( 20-bit ),再加上该单元( Label )的段內偏移量( 16-bit )来得到其物理地址( 20-bit),如图3.1a 所示。
Fig 3.1: 实模式与保护模式寻址模型比较(参见图片)
接下来的发展就更快了,1985 年发布的i386 首先让PC CPU 进入了32 位时代,由此而带来的好处显而易见,寻址能力大大增强,但是多任务处理和虚拟存储器的需求仍然推动着i386 向更完善的保护模式发展。下面我们来了解一下“实模式”和“保护模式”的具体涵义。
3.1.2 实模式
实模式(real mode),有时候也被成为实地址模式(real address mode)或者兼容模式(compatibilitymode)是Intel 8086 CPU 以及以其为基础发展起来的x86 兼容CPU 采用的一种操作模式。其主要的特点有:20 比特的分段访问的内存地址空间(即1 MB 的寻址能力);程序可直接访问BIOS 中断和外设;硬件层不支持任何内存保护或者多任务处理。80286 之后所有x86 CPU 在加电自举时都是首先进入实模式; 80186 以及之前的CPU 只有一种操作模式,相当于实模式。
69 .endm
-------------------
Fig 3.3: 自动生成段描述符的宏定义(节自chapter3/1/pm.h)
图3.3 中所示, 就是自动生成段描述符的汇编宏定义。我们只需要给宏Descriptor 三个参数:Base(段基址), Limit(段界限[段长度]), Attr(段属性),Descriptor 就会自动将三者展开放到段描述符中对应的位置。看看我们在程序中怎么使用这个宏:
段描述符主要用来为处理机提供段位址,段访问控制和状态信息。图3.2 显示了一个基本的段描述符结构:
Fig 3.2: 段描述符(参见图片)
看到上面那么多内容,是不是感觉有点儿恐怖啊!其实简单的来看,我们现在最关注的是段基址,就是图3.2 中标记为Base 的部分。可以看到,段基址在段描述符中被分割为三段存储,分别是:Base 31:24, Base 23:16, Base Address 15:0,把这三段拼起来,我们就得到了一个32 位的段基址。
CHAPTER 3 进入保护模式
前面我们看到,通过一些很简单的代码,我们做到了启动一个微型系统,加载文件系统中的文件进入内存并运行的功能。应该注意的是,在前面的代码中我们使用的内存空间都很小。我们看一下boot.bin 和LOADER.BIN 的大小就能感觉出来(当然,可执行文件小未必使用内存空间小,但是这两个文件也太小了^-^)。
这些东西那么乱,难道要每次一点儿一点儿地计算吗?放心,程序员自有办法,请看下面的程序:
-------------------
56 /* MACROS */
57
58 /* Segment Descriptor data structure.
59 Usage: Descriptor Base, Limit, Attr
-------------
在保护模式下,每个单元的物理地址仍然是由逻辑地址表示,但是这个逻辑地址不再由(段地址:偏移地址)组成了,而是由(段选择子:偏移地址)表示。这里的偏移地址也变成了32 位的,所以段空间也比实模式下大得多。偏移地址的意思和实模式下并没有本质不同,但段地址的计算就要复杂一些了,如图3.1b 所示。段基址(Segment Base Address)被存放在段描述符(Segment Descriptor)中,GDT(Global Descriptor Table,全局段选择子表)是保存着所有段选择子的信息,段选择子(Segment Selector)是一个指向某个段选择子的索引。
下面我们就来一步步完成我们的第一个保护模式loader 。
3.2.1 GDT 数据结构
要写GDT,首先得了解GDT 的数据结构。GDT 实际上只是一个存储段描述符的线性表(可以理解成一个段描述符数组),对它的要求是其第一个段描述符置为空,因为处理机不会去处理第一个段描述符,所以理解GDT 的数据结构难点主要在于理解段描述符的数据结构。
首先,我们来理清一下应该如何进入保护模式:
1. 我们需要一个GDT。由于保护模式的寻址方式是基于GDT 的,我们得自己写一个GDT 数据结构并将其载入到系统中。
2. 我们需要为进入保护模式作准备。由于保护模式和实模式运行方式不同,在进入保护模式之前,我们需要一些准备工作。
3. 我们需要一段能在保护模式下运行的代码demo,以提示我们成功进入了保护模式。
如图3.1b 所示,当我们计算某个单元的物理地址时,只需要给出(段选择子:偏移地址),CPU会从GDT 中按照段选择子找到对应的段描述符,从段描述符中找出段基址,将段基址加上偏移量,就得到了该单元的物理地址。
3.2 与保护模式初次会面
介绍完了保护模式和实模式的不同,下面我们就尝试一下进入保护模式吧。在上一章我们已经实现了用启动扇区加载引导文件,所以这里我们就不用再去管启动扇区的事情了,下面的修改均在loader.S中进行。上一章的loader.S 仅仅实现在屏幕的上方中间打印了一个L ,下面我们的loader.S 要进入保护模式来打印一些新东西。
$ ls -l boot.bin LOADER.BIN
-rwxr-xr-x 1 solrex solrex 512 2008-04-26 16:34 boot.bin
-rwxr-xr-x 1 solrex solrex 15 2008-04-26 16:34 LOADER.BIN
boot.bin 是512 个字节(其中还有我们填充的内容,实际指令只有480 个字节),而LOADER.BIN更过分,只有15 个字节大小。可想而知这两个文件在内存中能使用多大的空间吧。如果读者有些汇编语言经验的话,就会发现我们在前面的程序中使用的存储器寻址都是在实模式下进行的,即:由段寄存器(cs, ds: 16-bit)配合段内偏移地址(16-bit)来定位一个实际的20-bit 物理地址,所以我们前面的程序最多支持220 = 210 * 210 = 1024 * 1024 bytes = 1MB 的寻址空间。
由此可见,实模式的寻址模式是很简单的,就是用两个16 位逻辑地址(段地址:偏移地址)组合成一个20 位物理地址,而保护模式的寻址方式就要稍微复杂一点了。 ຫໍສະໝຸດ TIPS---------
Intel 的CPU 在保护模式下是可以选择打开分页机制的,但为了简单起见,我们先不开启分页机制,所以下面的讲解针对只有分段机制的保护模式展开。
因为受到字长(16 位)的限制,如果仅仅使用单个寄存器寻址, 8086 仅仅能访问64KB(216) 的地址空间,这显然不能满足一般要求,而当时1MB(220) 对于一般的应用就比较足够了,所以8086 使用了20 位的地址线。
在8086 刚发布的时候,没有“实模式”这个说法,因为当时的Intel CPU 只有一种模式。在Intel 以后的发布中, 80286 引入了“保护模式”寻址方式,将CPU 的寻址范围扩大到16(224) MB ,但是80286仍然是一款16 位CPU ,这就限制了它的广泛应用。但是“实模式”这个说法,就从80286 开始了。
64 .2byte \Limit & 0xFFFF
65 .2byte \Base & 0xFFFF
66 .byte (\Base >> 16) & 0xFF
67 .2byte ((\Limit >> 8) & 0xF00) | (\Attr & 0xF0FF)
68 .byte (\Base >> 24) & 0xFF
3.1.3 保护模式
保护模式(protected mode),有时候也被成为保护的虚拟地址模式(protected virtual address mode),也是一种x86 兼容CPU 的工作模式。保护模式为系统软件实现虚拟内存、分页机制、安全的多任务处理的功能支持,还有其它为操作系统提供的对应用程序的控制功能支持,比如:特权级、实模式应用程序兼容、虚拟8086 模式。
3.1.1 一段历史
Intel 公司在1978 年发布了一款16 位字长CPU: 8086 ,最高主频5 MHz?10 MHz ,集成了29,000个晶体管,这款在今天感觉像玩具一样的CPU 却是奠定今天Intel PC 芯片市场地位的最重要的产品之一。虽然它的后继者8088 ,加强版的8086 (增加了一个8 比特的外部总线)才是事实上的IBM 兼容机(PC,个人电脑)雏形的核心,但人们仍然习惯于用8086 作为厂商标志代表Intel 。
一般情况下,段地址会被放在四个段寄存器中,即:代码段CS,数据段DS,堆栈段SS 和附加段ES 寄存器。这样在加载数据或者控制程序运行的时候,只需要一个偏移量参数,CPU 会自动用对应段的起始地址加上偏移量参数来得到需要的地址。(后继CPU 又加上了两个段寄存器FS 和GS ,不过使用方式是基本一样的。)
60 Base: 4byte
61 Limit: 4byte (low 20 bits available)
62 Attr: 2byte (lower 4 bits of higher byte are always 0) */
63 .macro Descriptor Base, Limit, Attr
3.1.4 实模式和保护模式的寻址模式
前面提到过,实模式下的地址线是20 位的,所以实模式下的寻址模式使用分段方式来解决16 位字长机器提供20 位地址空间的问题。这个分段方法需要程序员在编制程序的过程中将存储器划分成段,每个段内的地址空间是线性增长的,最大可达64K(216),这样段內地址就可以使用16 位表示。段基址( 20-bit )的最低4 位必须是0 ,这样段基址就可以使用16 位段地址来表示,需要时将段地址左移4位就得到段起始地址。除了便于寻址之外,分段还有一个好处,就是将程序的代码段、数据段和堆栈段等隔离开,避免相互之间产生干扰。